Результат интеллектуальной деятельности: Способ и система многоцелевого сопровождения в двухпозиционных радиолокационных системах
Вид РИД
Изобретение
Изобретение относится к радиолокации и может быть использовано при разработке перспективных многопозиционных радиолокационных систем и их модернизации. Достигаемый технический результат: повышение достоверности, точности и устойчивости многоцелевого сопровождения.
Одним из направлений, обеспечивающих улучшение всех системных показателей авиационных информационно-управляющих систем (ИУС) [1] - эффективности, живучести, динамичности и информативности - является использование многопозиционного принципа их построения, в рамках которого осуществляется согласованное устойчивое формирование нужных данных от пространственно-разнесенных источников [1].
Однако, использование этого принципа, давая определенные преимущества, требует и значительных усложнений ИУС, обусловленных, прежде всего, появлением еще одного более высокого управленческого уровня, предназначенного для управления пространственным положением позиций в рамках траекторного управления наблюдением [2] и управления информационными потоками извлечения информации и обмена ею между позициями.
Влияние этих усложнений усиливается при построении авиационных многопозиционных радиолокационных систем (МП РЛС) [3]. Особенно эти усложнения проявляются при использовании в МП РЛС режима многоцелевого сопровождения, поскольку в процессе его осуществления необходимо идентифицировать поступающие сигналы не только по сопровождаемым воздушным объектам, но и по позициям.
При этом необходимо подчеркнуть, что при решении задач идентификации измерений в МП РЛС необходимо учитывать следующие особенности:
 каждая позиция измеряет координаты воздушных объектов в своей, как правило, полярной системе координат, начало которой связано с центром массы носителя [4, 5];
каждая позиция измеряет координаты воздушных объектов в своей, как правило, полярной системе координат, начало которой связано с центром массы носителя [4, 5];
время прихода сигналов, отраженных от одного воздушного объекта, на различные позиции в общем случае разное;
точность измерения одних и тех же координат на различных позициях может существенно различаться;
законы изменения координат одних и тех же воздушных объектов для различных позиций могут отличаться друг от друга;
пространственное и взаимное расположение позиций изменяются во времени;
для управления пространственным положением позиций информация о местоположении воздушных объектов должна формироваться непрерывно.
Первая особенность предопределяет необходимость приведения всех измерений, формируемых на каждой позиции, к единой системе координат с общим началом.
Остальные особенности предопределяют необходимость использования алгоритмов аналого-дискретной фильтрации [6, 7].
После выполнения процедуры идентификации, остальные этапы многоцелевого сопровождения (МЦС) могут быть выполнены на основе алгоритмов сопровождения одиночных воздушных объектов в МП РЛС с учетом возрастания числа измерений, поступающих от других позиций. В связи с этим, далее в рамках общей процедуры МЦС основное внимание будет уделено рассмотрению алгоритмов идентификации.
В общем случае задача идентификации измерений при МЦС, при которых общий прогноз корректируется невязками, формируемыми по измерениям всех позиций, в МП РЛС может быть решена различными способами с использованием различных систем координат и различных критериев принятия решений [5] при различных вариантах информационного обмена (активном, пассивном и полуактивном).
В качестве прототипа был взят способ многоцелевого сопровождения в однопозиционных импульсно-доплеровских РЛС с идентификацией измерений в стробах отождествления и α,β-фильтрацией [3], функционирующий следующим образом.
РЛС формирует измерения дальности Д до воздушного объекта, скорости сближения Vc с нею и бортовых пеленгов в горизонтальной ϕ плоскости. Бортовая вычислительная система осуществляет их экстраполяцию, формирует стробы отождествления и идентифицирует в них результаты измерений следующего цикла обзора, формируя оценки дальности  , скорости сближения
, скорости сближения  и бортового пеленга
и бортового пеленга  .
.
На интервалах времени между приходами измерений экстраполируются завязанные ранее траектории на основе гипотезы изменения координат состояния (обозначаемых далее для удобства как xi ∈ [Д,Vc,ϕ]) с постоянной скоростью [3]. Текущее экстраполированное значение р-й координаты состояния хэ,pi поступает к потребителям информации для реализации траекторного управления и в ракеты в качестве команд целеуказаний.
Одновременно с выполнением экстраполяции для каждого сопровождаемого воздушного объекта и измеряемых координат состояния формируются стробы отождествления Δxi, которые, как правило, выбираются постоянными [4].
Если на момент времени (k+1)-х измерений zi для некоторой траектории с номером p* для экстраполированных значений координат состояния хэ,p*i(k+1) выполняются условия

где k∈[1,∞) - номер дискрета времени, то полученные измерения считаются соответствующими этой траектории и используются для последующей коррекции в алгоритмах α,β-фильтрации [4].
Коррекция результатов прогноза идентифицированной траектории по полученным измерениям выполняется по алгоритмам α,β-фильтрации:


Здесь  определяются путем экстраполяции по гипотезе движения с постоянной скоростью на момент прихода измерений; Т - интервал времени между приходом измерений; αi, βi - соответствующие постоянные коэффициенты усиления невязок измерений. После вычисления оценок (2), (3) начинается новый этап экстраполяции.
определяются путем экстраполяции по гипотезе движения с постоянной скоростью на момент прихода измерений; Т - интервал времени между приходом измерений; αi, βi - соответствующие постоянные коэффициенты усиления невязок измерений. После вычисления оценок (2), (3) начинается новый этап экстраполяции.
Данный способ МЦС, являясь одним из наиболее распространенных, не обладает требуемой для целеуказаний точностью и устойчивостью сопровождения воздушных объектов. Низкая точность оценивания координат при использовании рассмотренного способа МЦС объясняется следующими причинами: большим временем обращения к воздушному объекту при использовании антенн с механическим сканированием; применением достаточно простых моделей состояния для прогноза; низкой достоверностью идентификации воздушных объектов в широких стробах отождествления и низкой точностью формирования оценок с помощью алгоритмов α,β-фильтрации.
Предлагаемый способ МЦС для двухпозиционной РЛС (ДП РЛС) отличается от прототипа прежде всего использованием измерений, поступающих от второй пространственно разнесенной позиции, и применением более совершенных алгоритмов аналого-дискретной фильтрации, что позволяет повысить живучесть, динамичность и информативность информационной системы в целом. При разработке режима МЦС в ДП РЛС полагалось, что:
1. На каждой РЛС известны собственные координаты пространственного расположения x1, y1 и координаты другой позиции
2. На каждой позиции используется режим активной локации и измеряются дальности Дij до воздушного объекта, скорости их изменений  и бортовые пеленги в горизонтальной ϕij плоскости. Здесь i=1, 2 - номер позиции, j - номер воздушного объекта.
и бортовые пеленги в горизонтальной ϕij плоскости. Здесь i=1, 2 - номер позиции, j - номер воздушного объекта.
3. Измерения от одного и того же воздушного объекта формируются на позициях в различные моменты времени.
4. Между позициями производится обмен измерениями в процессе сопровождения воздушных объектов.
5. В качестве общей используется прямоугольная система координат, связанная с центром массы носителя РЛС1.
6. Для текущего оценивания координат воздушных объектов вместо α,β-фильтра используется аналого-дискретный фильтр второго порядка [6], позволяющий для линейного процесса вида
при наличии измерений

сформировать оценки по правилу
при условии, что Δt >> Ti, где Ti - наименьший интервал обращения к воздушному объекту РЛС i-ой позиции; xиц1(k), yиц1(k) и xиц2(k), yиц2(k) - измерения, сформированные по наблюдениям первой и второй позиций, a Q1 и Q2 - признаки прихода измерений:

коэффициенты Kxij и Kyij усиления соответствующих невязок  и
и  вычисляются по общему правилу
вычисляются по общему правилу



- априорная D(x,y)i(k,k-1) и апостериорная D(x,y)i(k-1) матрицы ошибок фильтрации для соответствующих фильтров; Ф(x,y)i - матрица перехода; H(x,y)j - матрица измерений соответствующей координаты для j-й позиции; ξ(x,y)i - вектор гауссовых случайных возмущений с матрицей дисперсий D(x,y)и; ξ(x,y)и - вектор гауссовых ошибок измерений, характеризуемый матрицей дисперсий D(x,y)и, Е - единичная матрица; Т - операция транспонирования.
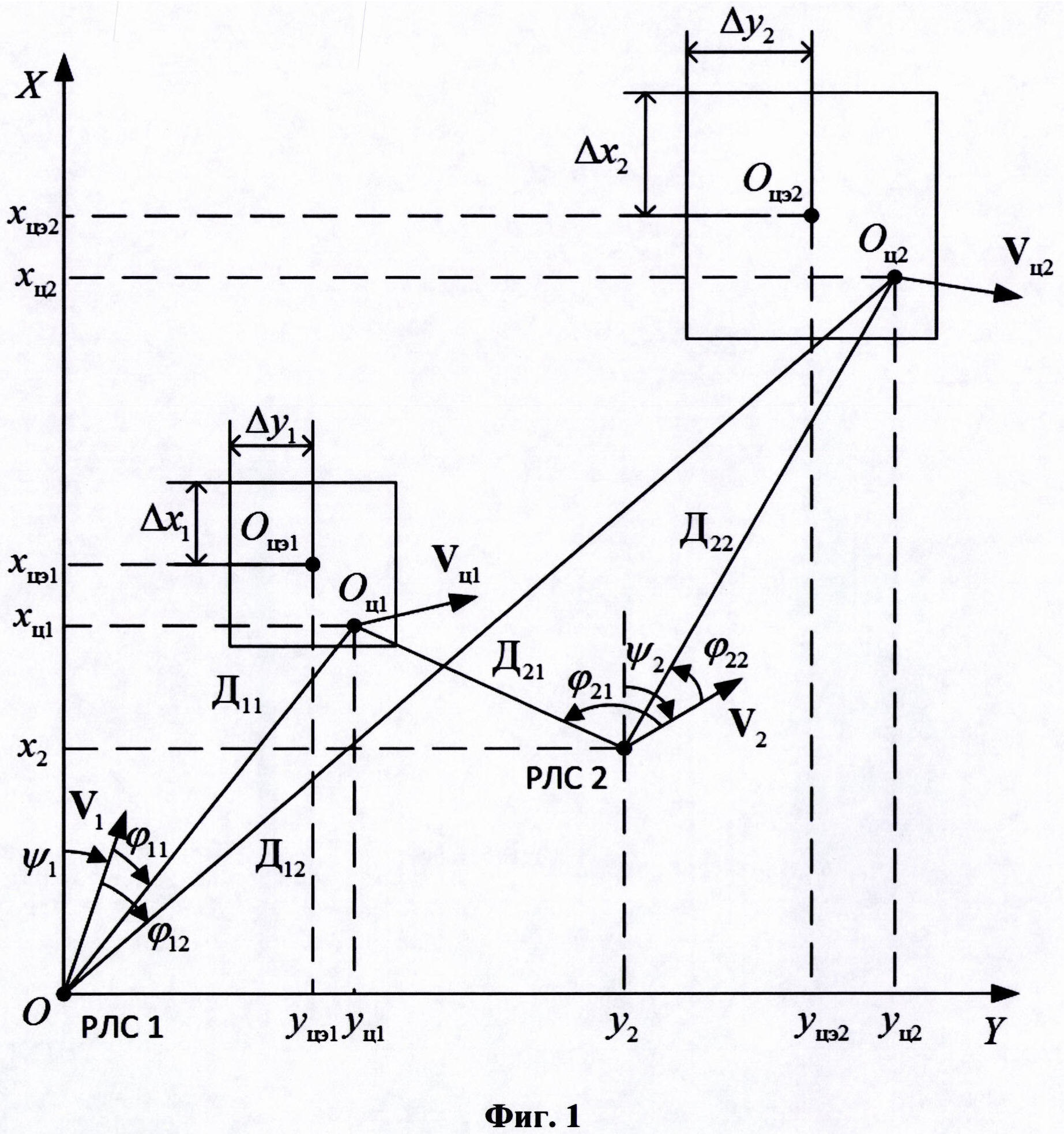
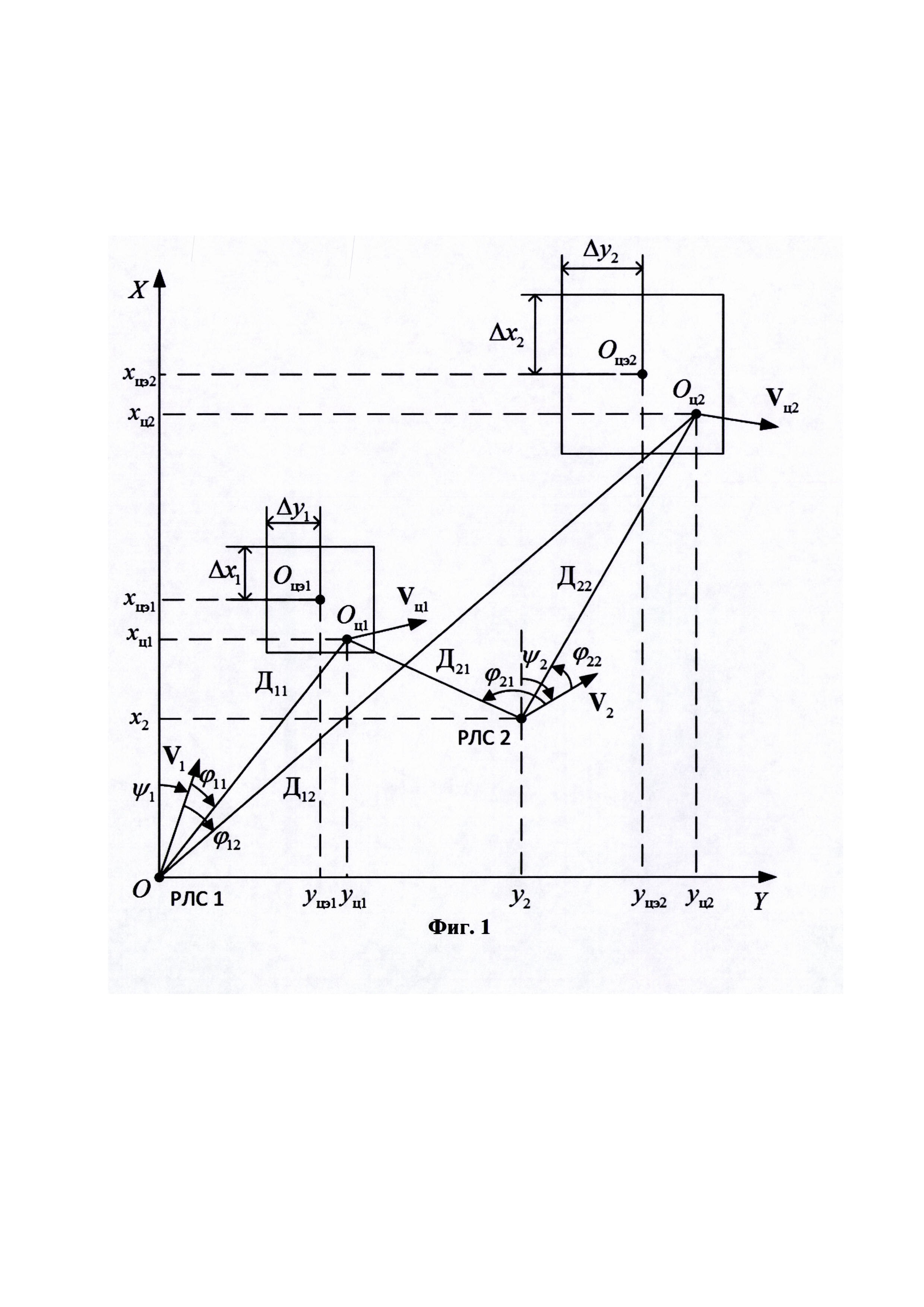
Геометрические связи позиций и воздушных объектов показаны на фиг. 1.
На основе полученных измерений рассчитываются прямоугольные координаты воздушного объекта (* - неизвестный номер цели), от которого получен отраженный сигнал, на первой позиции РЛС1 (фиг. 1):

а на второй позиции (РЛС2):

При формировании (12), (13) бортовые пеленги ϕi* считаются положительными для воздушных объектов, расположенных справа от продольной оси ЛА. Если воздушные объекты расположены слева, то пеленги считаются отрицательными.
На основе представлений (12), (13) в РЛС1 формируются косвенные измерения


где ξихi, ξиyi - шумы измерений, определяемые ошибками первичных измерений РЛС позиций и правилами пересчета (12), (13), позволяющими рассчитать их дисперсии Dиxij, Dиyij, которые и используются в (6).
Если в процессе перебора сформированных измерений по всем результатам прогноза (2) для i-ого воздушного объекта выполняются условия

то принимается решение о принадлежности ей исследуемых измерений, после чего они поступают в алгоритм фильтрации (6) координат этого воздушного объекта для коррекции экстраполированных значений. Здесь xиц, yиц - результаты измерений (14) или (15), а Δxi и Δyi - размер стробов отождествления.
Размеры стробов, построенных относительно экстраполированных координат Оцэ1, Оцэ2 (фиг. 1), определяются соотношениями [4]

в которых Т1 и Т2 - интервалы обращения РЛС1 и РЛС2 к воздушному объекту;  и
и  - дисперсии производных xi и yi; Dиximax, Dиyimax - максимально возможные дисперсии ошибок измерений одной из позиций.
- дисперсии производных xi и yi; Dиximax, Dиyimax - максимально возможные дисперсии ошибок измерений одной из позиций.
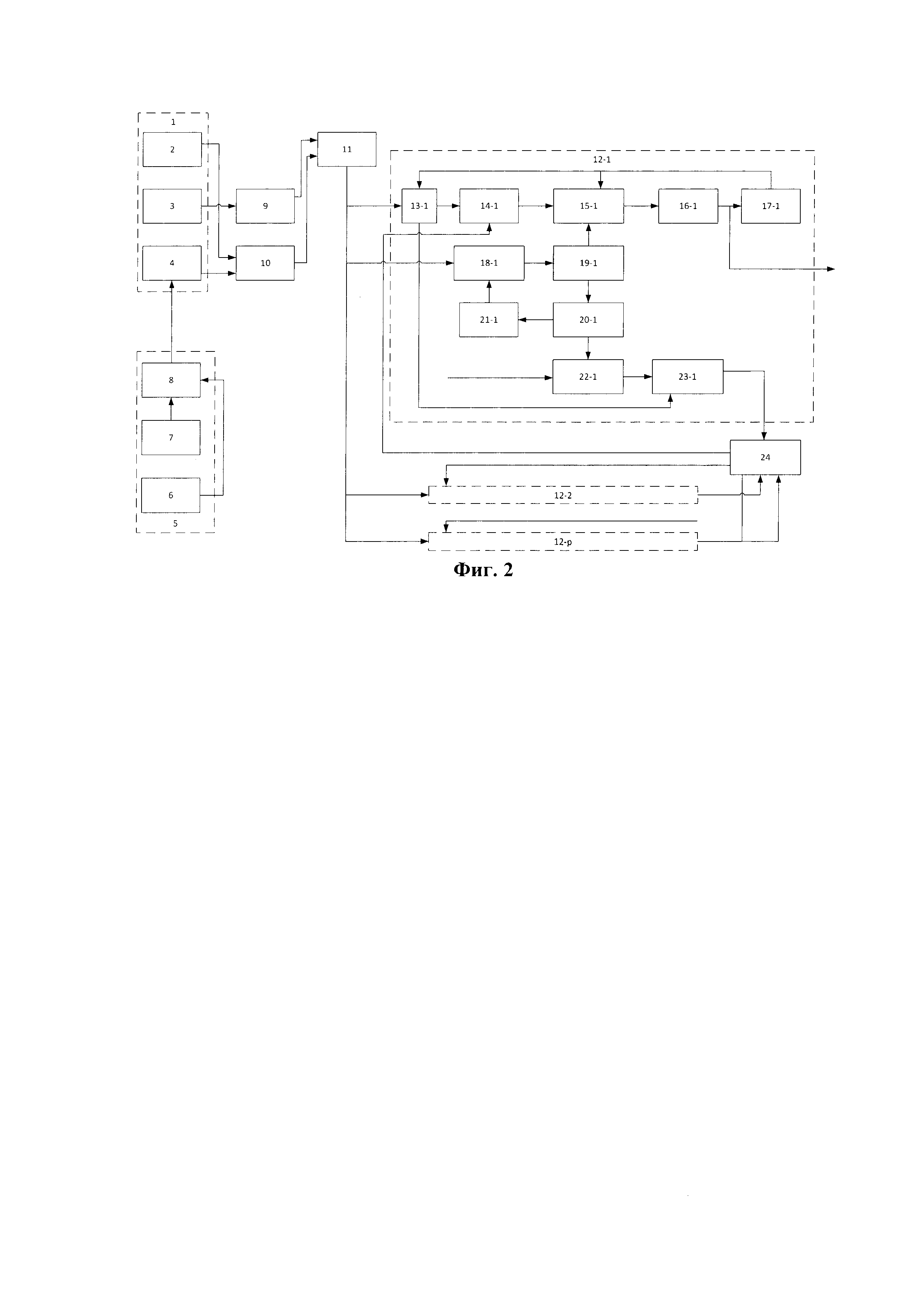
Структурная схема системы, реализующей предложенный способ многоцелевого сопровождения, приведена на фиг. 2.
Система является многоканальной, число идентичных каналов определяется числом р сопровождаемых воздушных объектов. В целом, в систему входят:
• первая информационная позиция 1 (ИП1), состоящая из:
• бортовой навигационной системы 2, формирующей измерения собственного положения первой информационной позиции 1;
• радиолокационной системы 3 (РЛС1), формирующей измерения дальностей и бортовых пеленгов воздушных объектов относительно первой информационной позиции 1;
• комплекса средств связи 4, принимающего измерения дальностей и бортовых пеленгов воздушных объектов и собственных координат от второй информационной позиции 5;
• вторая информационная позиция 5 (ИП2), состоящая из:
• бортовой навигационной системы 6, формирующей измерения собственного положения второй информационной позиции 5;
• радиолокационной системы 7 (РЛС2), формирующей измерения дальностей и бортовых пеленгов воздушных объектов относительно второй информационной позиции 5;
• комплекса средств связи 8, передающего измерения дальностей и бортовых пеленгов воздушных объектов и собственных координат на первую информационную позицию 1;
• блок пересчета измерений от ИП1 9, преобразующий измерения от РЛС 3 первой информационной позиции 1 в декартовы координаты (12) и формирующий признаки прихода измерений (8) от РЛС1;
• блок пересчета измерений от ИП2 10, преобразующий измерения от РЛС 7 второй информационной позиции 5 в декартовы координаты (13) первой информационной позиции 1 и формирующий признаки прихода измерений (8) от РЛС2;
• логический сумматор 11, формирующий непрерывную последовательность измерений (14), (15) и признаки прихода измерений;
• р каналов сопровождения воздушных объектов 12-1,..., 12-р, каждый из которых состоит из:
• блока формирования невязок 13-1, …, 13-р 

• ключа 14-1, …, 14-p, передающего рассчитанные невязки в канал сопровождения воздушного объекта для дальнейшей коррекции прогноза;
• блока коррекции прогноза 15-1, …15-p, формирующего оценки  по правилу (6);
по правилу (6);
• блока экстраполяции 16-1, …, 16-p, формирующего прогноз хэ1, …, хэр, уэ1, …, уэр по правилу (5);
• устройства задержки оценок 17-1, …, 17-p, задерживающего оценки  до прихода новых измерений от воздушного объекта;
до прихода новых измерений от воздушного объекта;
• блока расчета априорных дисперсий 18-1,…, 18-p, производящего вычисления по правилу (10);
• блока расчета коэффициентов усиления невязок 19-1, …, 19-p, производящего вычисления по правилу (9);
• блока расчета апостериорных дисперсий 20-1, …, 20-р, производящего вычисления по правилу (11);
• устройства задержки дисперсий 21-1, …, 21-p, задерживающего апостериорные дисперсии до прихода новых измерений от воздушного объекта;
• блока расчета стробов 22-1, …, 22-р, по правилам (17) определяющего размер стробов для идентификации пришедших измерений;
• порогового устройства 23-1, …, 23-р, сравнивающего полученные невязки с размерами стробов по правилам (16);
• устройства перебора 24, последовательно осуществляющего по порядковому номеру поиск того воздушного объекта, для которого раньше всех выполняются условия (16).
Навигационная система 2 соединена с блоками пересчета 9 и 10; РЛС 3 соединена с блоком пересчета 9; комплекс средств связи 4 соединен с блоком пересчета 10; навигационная система 6 соединена с комплексом средств связи 8; РЛС 7 соединена с комплексом средств связи 8; комплекс средств связи 8 соединен с комплексом средств связи 4; блок пересчета 9 соединен с логическим сумматором 11; блок пересчета 10 соединен с логическим сумматором 11; логический сумматор 11 соединен с блоками формирования невязок 13-1, …, 13-p и блоками расчета априорных дисперсий 18-1, …, 18-p; блоки формирования невязок 13-1, …, 13-p соединены с ключами 14-1, …, 14-р и пороговыми устройствами 23-1, …, 23-p; ключи 14-1, …, 14-p соединены с блоками коррекции прогноза 15-1, …, 15-p; блоки коррекции прогноза 15-1, …, 15-р соединены с блоками экстраполяции 16-1, …, 16-р; блоки экстраполяции 16-1, …, 16-p соединены с устройствами задержки 17-1, …, 17-р и конечными потребителями; устройства задержки 17-1, …, 17-p соединены с блоками формирования невязок 13-1, …, 13-p и блоками коррекции прогноза 15-1, …, 15-p; блоки расчета априорных дисперсий 18-1, …, 18-p соединены с блоками расчета коэффициентов усиления невязок 19-1, …, 19-p; блоки расчета коэффициентов усиления невязок 19-1, …, 19-p соединены с блоками расчета апостериорных дисперсий 20-1, …, 20-p; блоки расчета апостериорных дисперсий соединены с устройствами задержки 21-1, …,21-p и блоками расчета стробов 22-1, …, 22-p; устройства задержки 21-1, …,21-p соединены с блоками расчета априорных дисперсий 18-1, …, 18-p; блоки расчета стробов 22-1, …, 22-p соединены с пороговыми устройствами 23-1, …, 23-p; пороговые устройства соединены с устройством перебора 24; устройство перебора 24 соединено с ключами 14-1, …, 14-p.
Функционирование системы в динамике включает следующие этапы.
Если измерение пришло на первую информационную позицию ИП1 (блок 1), то полученные от ее РЛС (блок 3) измерения координат воздушного объекта Д1j,  ϕг1j, ϕв1j по формулам (12), (14) пересчитываются в декартовы координаты воздушного объекта хц1, уц1 в блоке пересчета измерений 9 и вместе с сформированным признаком прихода измерений (8) от РЛС1 передаются на логический сумматор 11. Если измерение пришло на вторую информационную позицию ИП2 (блок 5), то полученные от ее РЛС (блок 7) измерения координат воздушного объекта Д2j,
ϕг1j, ϕв1j по формулам (12), (14) пересчитываются в декартовы координаты воздушного объекта хц1, уц1 в блоке пересчета измерений 9 и вместе с сформированным признаком прихода измерений (8) от РЛС1 передаются на логический сумматор 11. Если измерение пришло на вторую информационную позицию ИП2 (блок 5), то полученные от ее РЛС (блок 7) измерения координат воздушного объекта Д2j,  ϕг2j, ϕв2j и полученные от бортовой навигационной системы (блок 6) собственные координаты передаются на комплекс средств связи 8 и далее на комплекс средств связи 4 первой информационной позиции (блок 1). Полученные измерение и собственные координаты второй информационной позиции передаются на блок пересчета измерений 10, где вместе с собственными координатами первой информационной позиции (блок 1), полученными от бортовой навигационной системы 2, пересчитываются по формулам (13), (15) в декартовы координаты воздушного объекта хиц2, уиц2 и передаются на логический сумматор 11 вместе с сформированным признаком прихода измерений (8). Сформированная на логическом сумматоре 11 единая последовательность измерений хиц*, уиц* вместе с признаками прихода измерений Q1,2 на блоки формирования невязок 13-1, …, 13-p каждого канала сопровождения воздушных объектов 12-1, …, 12-p и блоки расчета априорных дисперсий 18-1, …, 18-p. В блоках 18-1, …, 18-p по формуле (10) рассчитываются значения D(x,y)i(k,k-1) априорных дисперсий, по которым в блоках 19-1, …, 19-р по формула (9) рассчитываются коэффициенты усиления невязок K(x,y)ij. Полученные коэффициенты K(x,y)ij передаются в блоки коррекции прогнозов 12-1, …, 12-p и в блоки 20-1, …, 20-р, где по формуле (11) рассчитываются апостериорные дисперсии D(x,y)i(k). Рассчитанные апостериорные дисперсии D(x,y)i(k) передаются на устройства задержки 21-1, …, 21-р и блоки расчета стробов 22-1, …, 22-р. Задержанные на блоках 21-1, …, 21-p апостериорные дисперсии D(x,y)i(k-1) передаются в блоки 18-1, …, 18-p для расчета априорных дисперсий в следующий момент времени. Поступившие на блоки 22-1, …, 22-р значения D(x,y)i(k) используются для расчета стробов по формулам (17). Рассчитанные стробы Δxi и Δyi передаются на пороговые устройства 23-1, …, 23-р. Полученные в блоках 13-1, …, 13-p невязки передаются на ключи 14-1, …, 14-p и пороговые устройства 23-1, …, 23-р. В пороговых устройствах 23-1, …, 23-р выполняется проверка условия (16), результаты передаются с каждого канала в устройство перебора 24. В устройстве перебора 24 производится последовательная проверка результатов выполнения условия (16) и при нахождении канала с наименьшим номером (*), для которого данное условие выполняется, на ключ 14-* соответствующего канала передается сигнал замыкания. При замыкании ключа 14-* находящееся на нем значение невязки передается на блок коррекции невязок 15-*, где по формуле (6) производится коррекция текущего прогноза и получаются оценки
ϕг2j, ϕв2j и полученные от бортовой навигационной системы (блок 6) собственные координаты передаются на комплекс средств связи 8 и далее на комплекс средств связи 4 первой информационной позиции (блок 1). Полученные измерение и собственные координаты второй информационной позиции передаются на блок пересчета измерений 10, где вместе с собственными координатами первой информационной позиции (блок 1), полученными от бортовой навигационной системы 2, пересчитываются по формулам (13), (15) в декартовы координаты воздушного объекта хиц2, уиц2 и передаются на логический сумматор 11 вместе с сформированным признаком прихода измерений (8). Сформированная на логическом сумматоре 11 единая последовательность измерений хиц*, уиц* вместе с признаками прихода измерений Q1,2 на блоки формирования невязок 13-1, …, 13-p каждого канала сопровождения воздушных объектов 12-1, …, 12-p и блоки расчета априорных дисперсий 18-1, …, 18-p. В блоках 18-1, …, 18-p по формуле (10) рассчитываются значения D(x,y)i(k,k-1) априорных дисперсий, по которым в блоках 19-1, …, 19-р по формула (9) рассчитываются коэффициенты усиления невязок K(x,y)ij. Полученные коэффициенты K(x,y)ij передаются в блоки коррекции прогнозов 12-1, …, 12-p и в блоки 20-1, …, 20-р, где по формуле (11) рассчитываются апостериорные дисперсии D(x,y)i(k). Рассчитанные апостериорные дисперсии D(x,y)i(k) передаются на устройства задержки 21-1, …, 21-р и блоки расчета стробов 22-1, …, 22-р. Задержанные на блоках 21-1, …, 21-p апостериорные дисперсии D(x,y)i(k-1) передаются в блоки 18-1, …, 18-p для расчета априорных дисперсий в следующий момент времени. Поступившие на блоки 22-1, …, 22-р значения D(x,y)i(k) используются для расчета стробов по формулам (17). Рассчитанные стробы Δxi и Δyi передаются на пороговые устройства 23-1, …, 23-р. Полученные в блоках 13-1, …, 13-p невязки передаются на ключи 14-1, …, 14-p и пороговые устройства 23-1, …, 23-р. В пороговых устройствах 23-1, …, 23-р выполняется проверка условия (16), результаты передаются с каждого канала в устройство перебора 24. В устройстве перебора 24 производится последовательная проверка результатов выполнения условия (16) и при нахождении канала с наименьшим номером (*), для которого данное условие выполняется, на ключ 14-* соответствующего канала передается сигнал замыкания. При замыкании ключа 14-* находящееся на нем значение невязки передается на блок коррекции невязок 15-*, где по формуле (6) производится коррекция текущего прогноза и получаются оценки  ,
,  . Результаты коррекции (для контура слежения 12-*) или оригинальный прогноз (для остальных контуров, а также в случае, если измерений не было) передаются на блоки экстраполяции 16-1, …, 16-p, где они используются для расчета по формулам (7) прогнозов на следующий момент времени xэj(k+1), yэj(k+1), передаваемых конечным пользователям и на устройство задержки 17-1, …, 17-р. Задержанные значения прогнозов xэj(k), yэj(k) передаются на блоки 13-1, …, 13-p для расчета невязок измерений и на блоки 15-1, …, 15-p для коррекции и экстраполяции в последующие моменты времени.
. Результаты коррекции (для контура слежения 12-*) или оригинальный прогноз (для остальных контуров, а также в случае, если измерений не было) передаются на блоки экстраполяции 16-1, …, 16-p, где они используются для расчета по формулам (7) прогнозов на следующий момент времени xэj(k+1), yэj(k+1), передаваемых конечным пользователям и на устройство задержки 17-1, …, 17-р. Задержанные значения прогнозов xэj(k), yэj(k) передаются на блоки 13-1, …, 13-p для расчета невязок измерений и на блоки 15-1, …, 15-p для коррекции и экстраполяции в последующие моменты времени.
Для предлагаемой системы многоцелевого сопровождения была проведена оценка эффективности, выполнявшаяся по результатам имитационного моделирования:
 полета двух носителей РЛС и двух воздушных объектов по пересекающимся траекториям в горизонтальной плоскости;
полета двух носителей РЛС и двух воздушных объектов по пересекающимся траекториям в горизонтальной плоскости;
измерений координат; их отождествления с траекториями и алгоритмов фильтрации.
При исследовании оценивались:
возможность осуществления МЦС в МП РЛС со стробовой идентификацией и поле условий применения для эффективного функционирования системы;
влияние второй позиции на показатели эффективности МП РЛС при МЦС;
зависимость показателей эффективности от соотношения периодов и времени обращения РЛС-позиций к воздушному объекту.
При этом для оценки работоспособности исследуемого варианта МЦС использовалась совокупность качественных и количественных показателей. Качественные показатели характеризировались видом траекторий воздушных объектов, формой областей неопределенности, а количественные - погрешностями оценок положения воздушных объектов в прямоугольной системе координат.
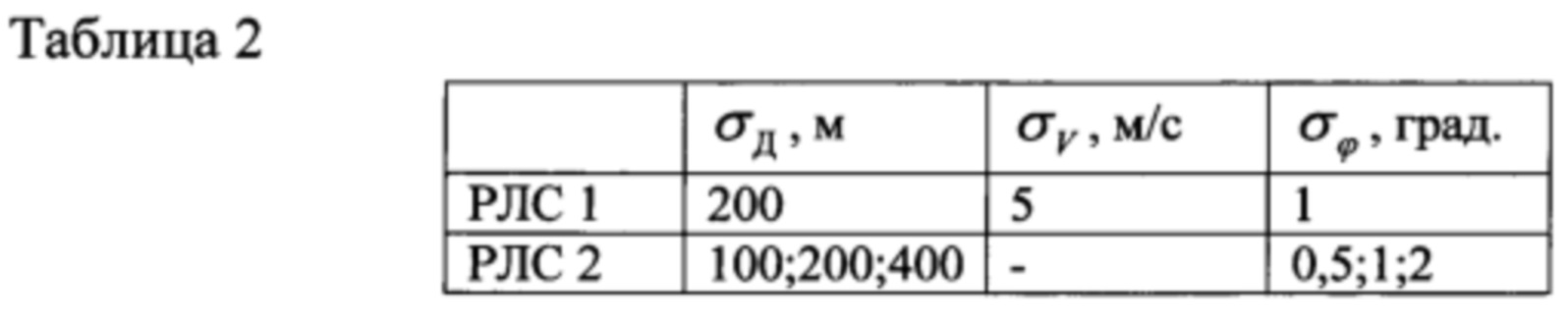
Начальные координаты, скорости и курсы позиций и воздушных объектов приведены в таблице 1, а дисперсии измерителей РЛС 1 и 2 - в таблице 2.

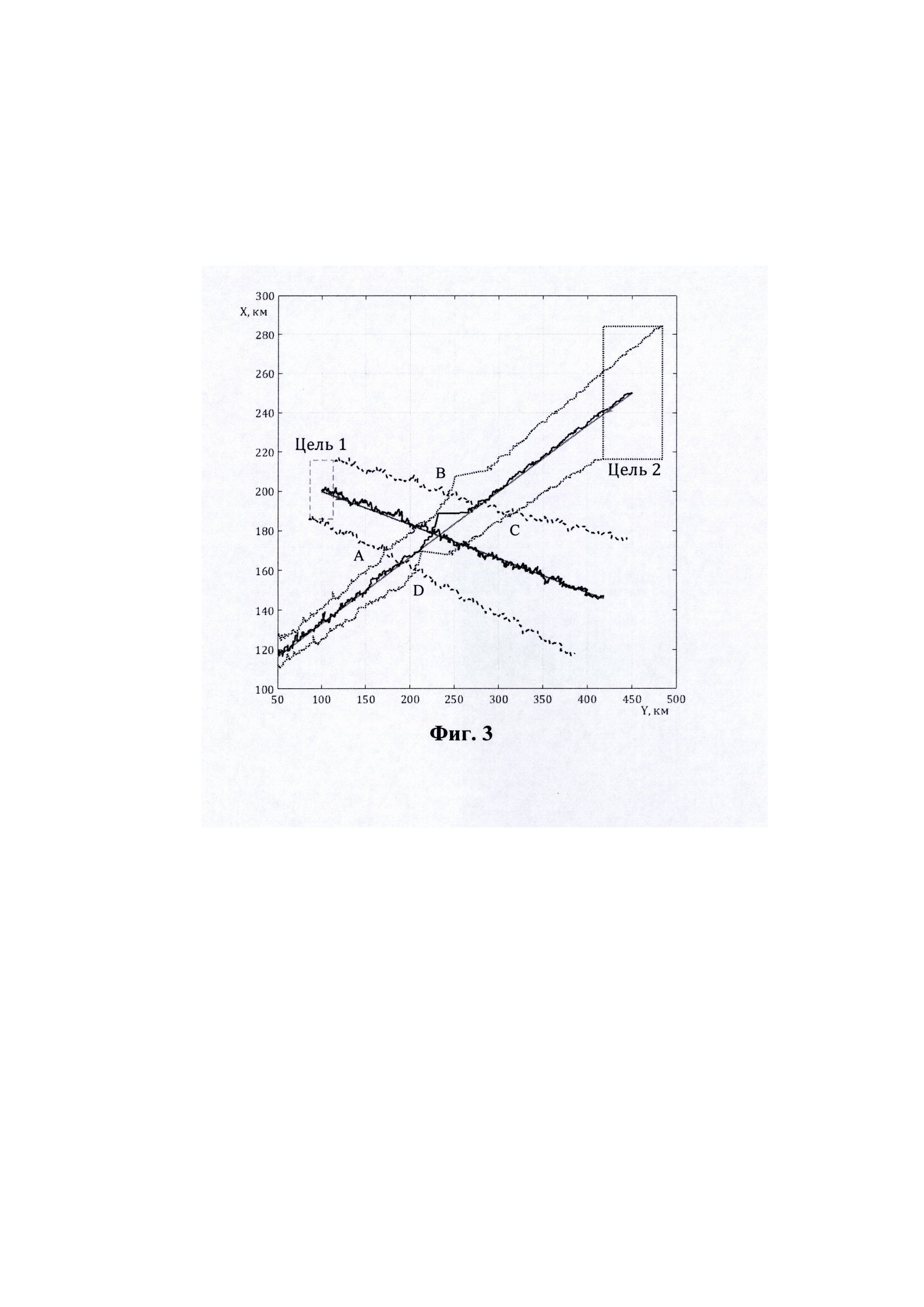
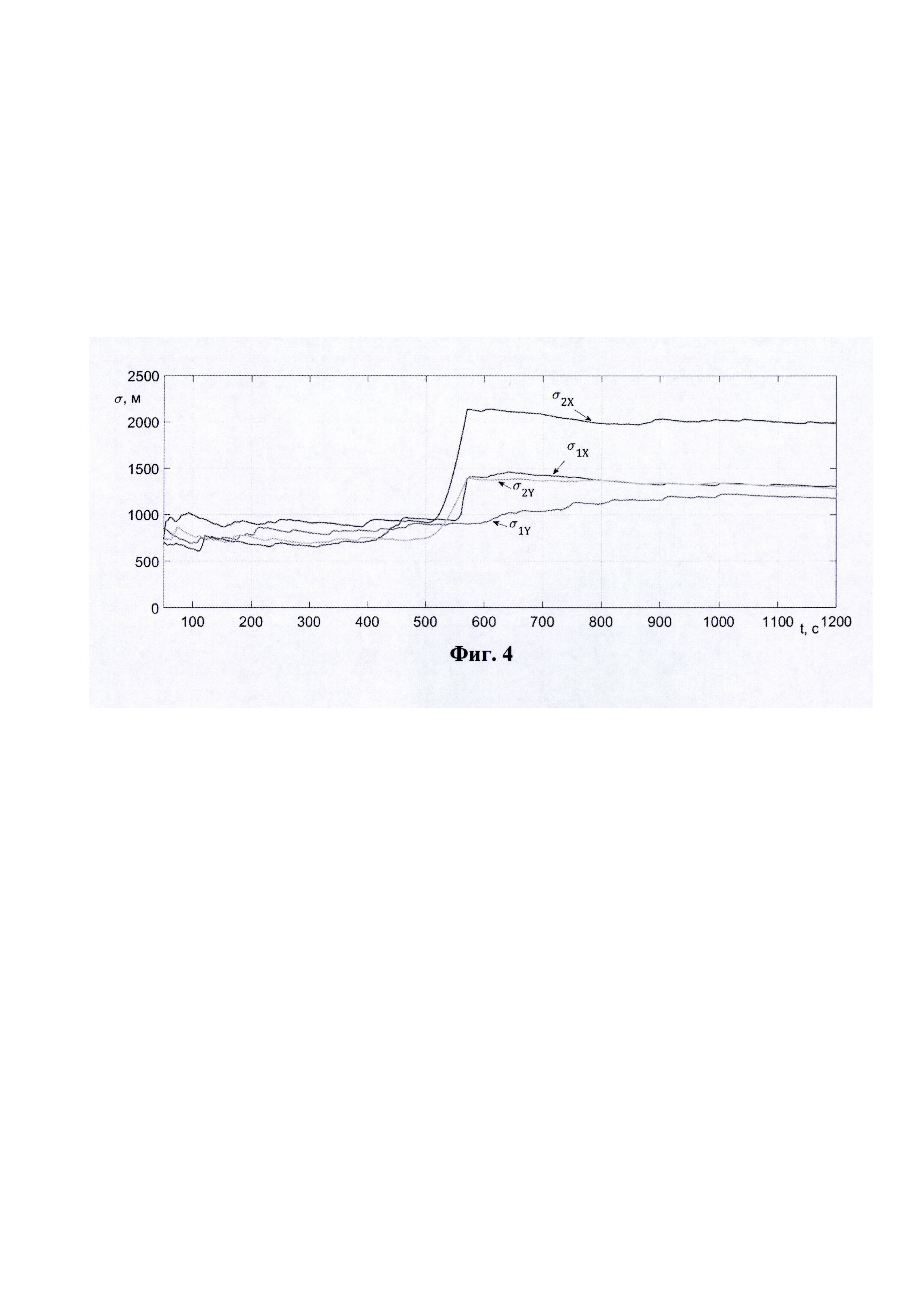
На фиг. 3 представлены траектории воздушных объектов относительно первой позиции, а на фиг. 4 - полученные СКО ошибок фильтрации. Штриховыми эпюрами на фиг. 3 показаны границы строба отождествления для траектории, соответствующей воздушному объекту 1, а пунктирными - для воздушного объекта 2. Как видно из иллюстрации, с увеличением расстояния до воздушных объектов размеры строба существенно увеличиваются (более двух порядков по площади), что приводит к падению достоверности идентификации, точности сопровождения и ухудшению разрешающей способности.
В общем случае, ошибки МЦС определяются как ошибками идентификации, приводящими к перепутыванию траекторий или срыву сопровождения, так и непосредственно ошибками оценивания алгоритмов фильтрации (6).
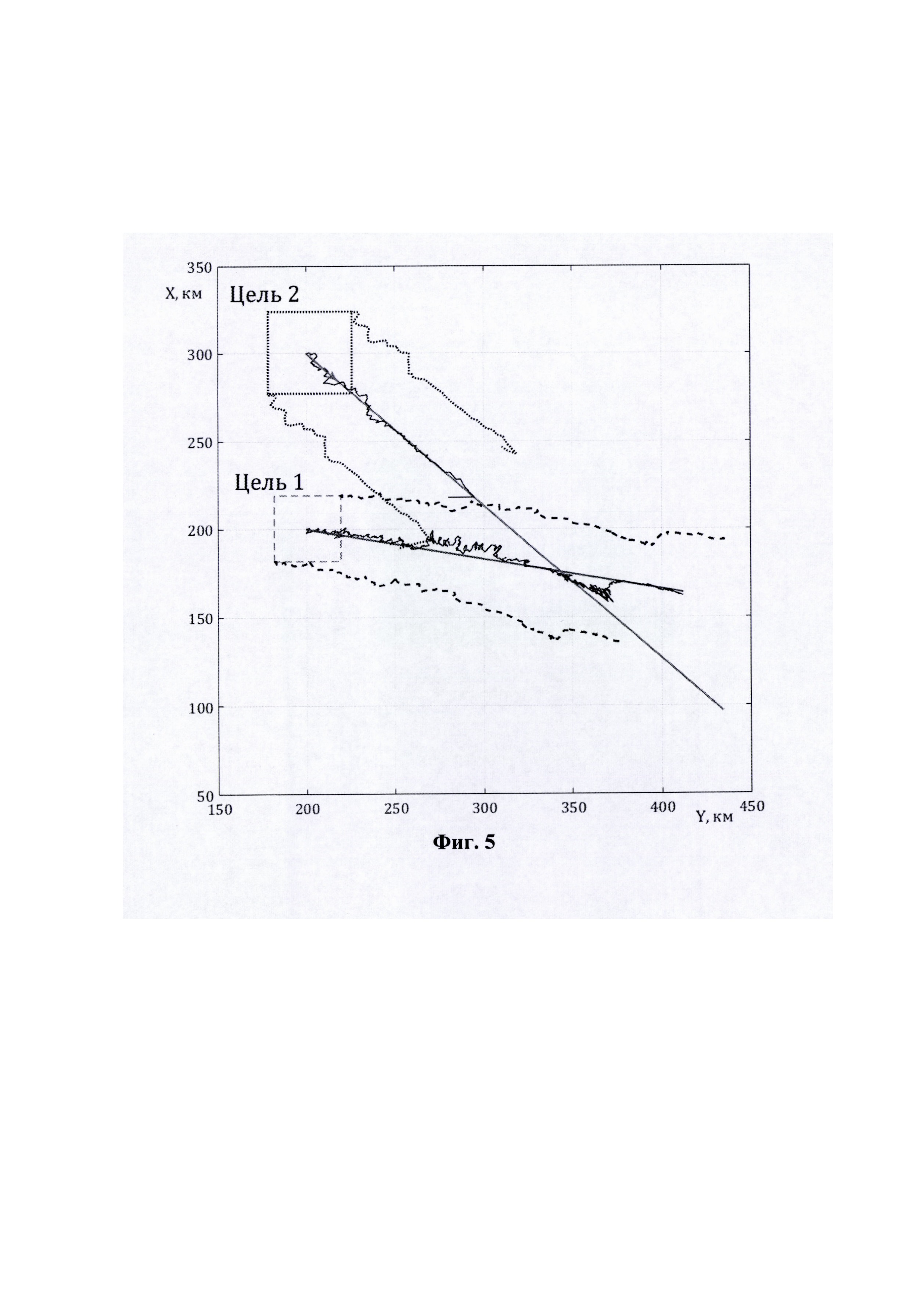
Точками А, В, С, D на фиг. 3 отмечена зона неопределенности, в которой стробы отождествления для траекторий воздушных объектов 1 и 2 совпадают, что при некоторых условиях и может привести к срыву сопровождения или перепутыванию траекторий части воздушных объектов (фиг. 5).
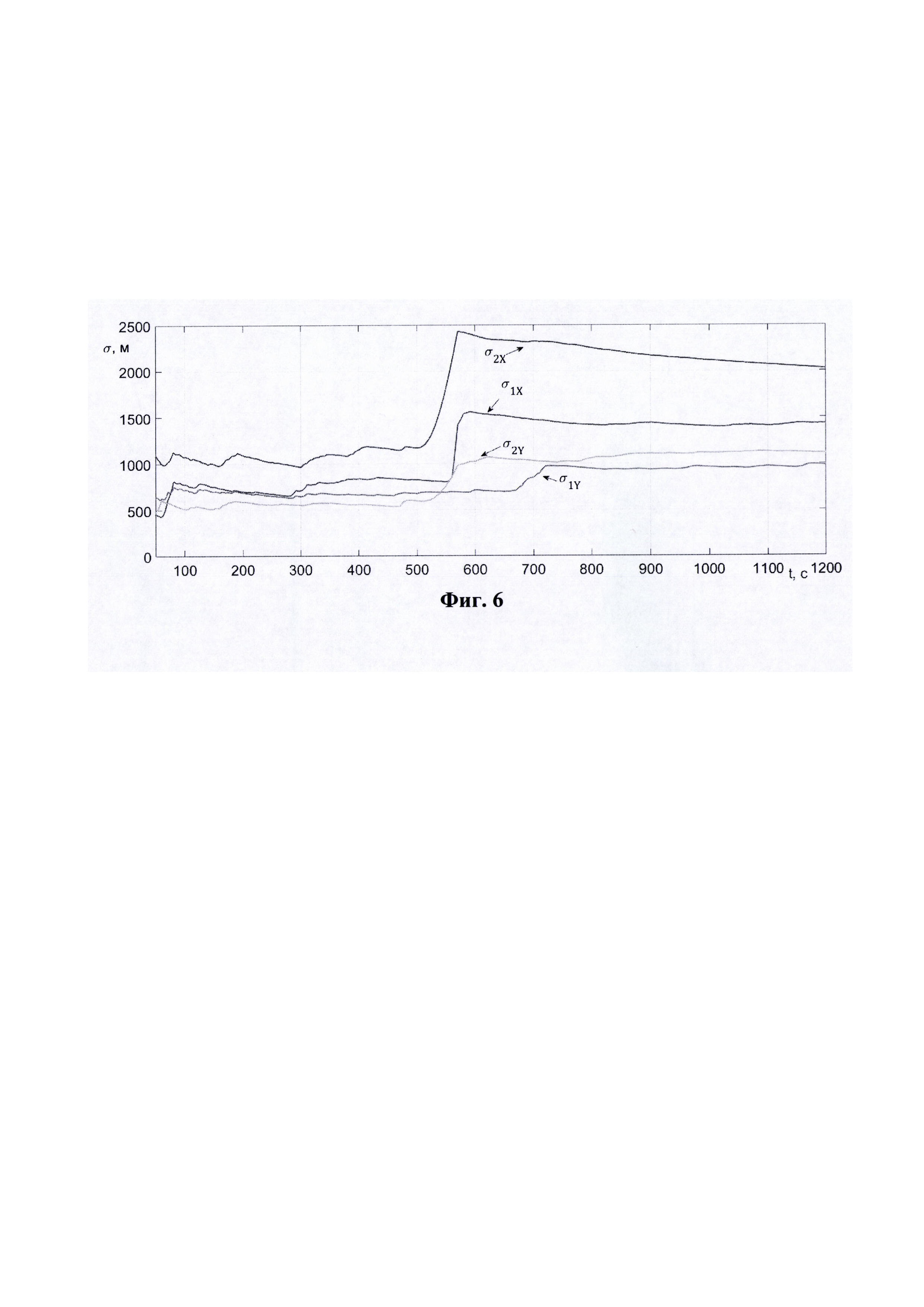
На фиг. 4 отрезку времени от 500 до 580 с соответствует попадание воздушных объектов в эту зону (фиг. 1). Как видно из фиг. 3 и 4, после попадания воздушного объекта 2 в зону неопределенности часть измерений, приходящих от нее, была присвоена воздушному объекту 1, что привело к росту ошибок фильтрации не только воздушного объекта 2 из-за длительного периода отсутствия коррекций экстраполяции, но и воздушного объекта 1. Также из фиг. 6 видно, что достоверность и точность фильтрации зависит и от ракурса воздушного объекта.
Необходимо отметить, что размер зоны ABCD зависит от взаимной геометрии расположения как самих воздушных объектов, так и позиций РЛС. Наименьший размер зоны неопределенности имеют для ортогональных трасс, в то время как наихудшие варианты имеют место для близкорасположенных параллельных трасс, которые характерны для полета летательных аппаратов строем.
На фиг. 5 хорошо видны ситуации срыва сопровождения воздушного объекта 2 и увеличения ошибок сопровождения воздушного объекта 1 в момент пересечения траекторий из-за присвоения ей измерений, приходящих от воздушного объекта 2.
Для выяснения влияния РЛС2 на показатели МЦС в целом проводилось два вида исследований. Первый включал в себя качественную оценку путем сравнения показателей точности в одно- и двухпозиционных вариантах. Проведенное исследование показало, что двухпозиционный вариант обладает лучшими показателями точности и устойчивости сопровождения. Однако количественные показатели в значительной степени зависят от геометрии взаимного расположения позиций и траекторий движения воздушных объектов (фиг. 6).
Кроме того, стоит отметить, что в случае многопозиционной РЛС пропадание измерений от воздушных объектов в связи с ее нахождением в зонах хвостового затенения или доплеровской режекции практически невозможно.
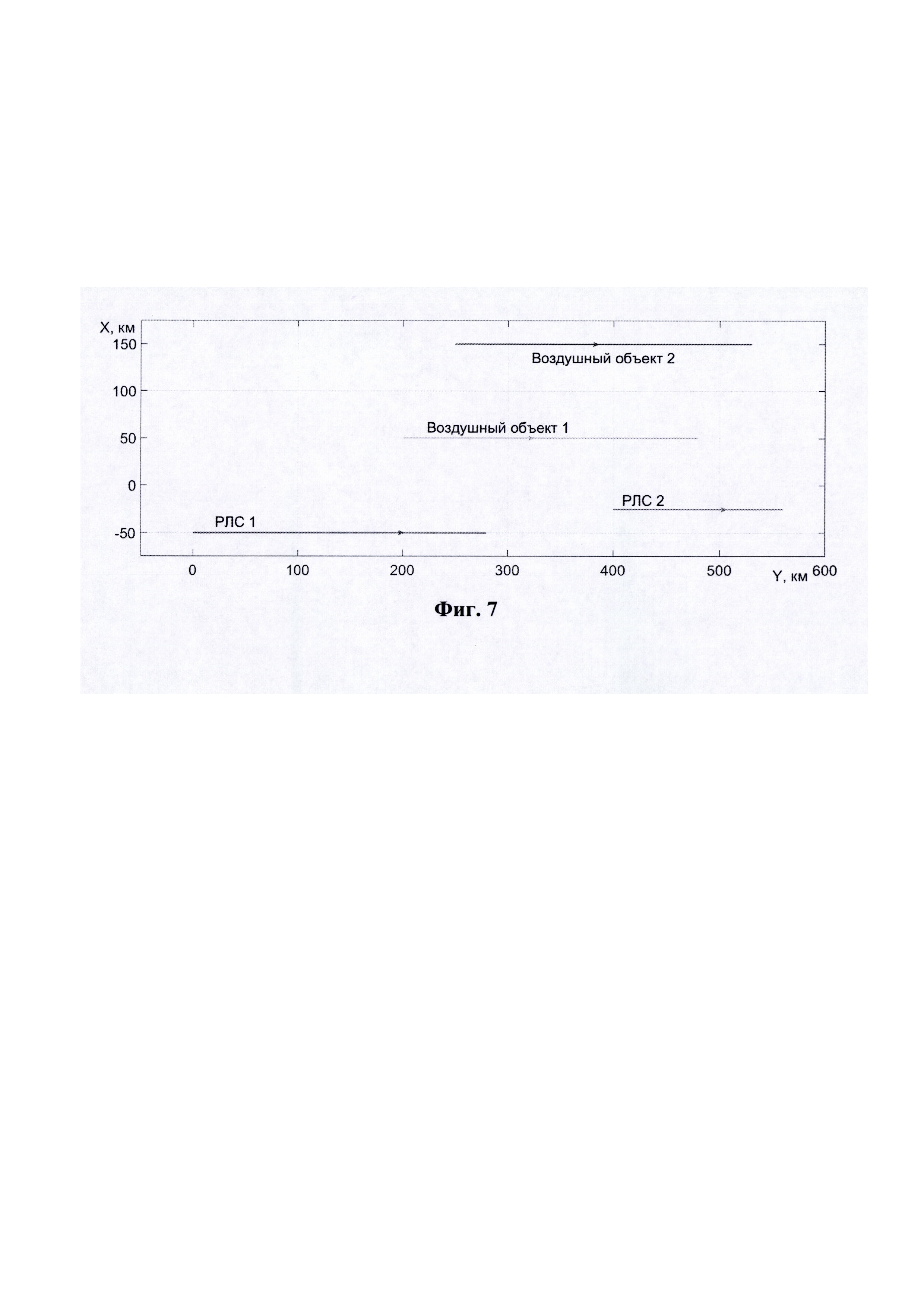
Второй вид исследований был посвящен анализу влияния показателей точности РЛС2 на показатели точности системы в целом. Вариант взаимного расположения позиций и воздушных объектов, снижающего влияние геометрии взаимного расположения воздушных объектов и позиций, приведен на фиг. 7.
Проведенное исследование показало, что в общем случае влияние дальномерного (фиг. 8) канала на точность системы МЦС в целом существенно меньше влияния угломерного (фиг. 9) канала.
Полученные результаты моделирования подтверждают возможность использования данного варианта многоцелевого сопровождения для двухпозиционных систем. При сопровождении легко идентифицируемых удаленных воздушных объектов (без пересечения стробов отождествления) использование позволяет МП РЛС при МЦС позволяет повысить устойчивость и точность сопровождения. Для отдельных приоритетных воздушных объектов возможно улучшение показателей сопровождения при применении траекторного управления информационными позициями.
Важным преимуществом полученной системы является отсутствие ограничений на возможность ее реализации, что позволяет реализовать ее на существующих радиолокационных систем.
Литература
1. Верба В.С. Авиационные комплексы радиолокационного дозора и наведения. Принципы построения, проблемы разработки и особенности функционирования. - М.: Радиотехника. - 2014. - 526 с.
2. Меркулов В.И. Улучшение системных показателей бортовой РЛС за счет траекторного управления наблюдением // Журнал радиоэлектроники, 2012, №1 http://jre.cpire.ru/jre/jan/12/index.html.
3. Черняк B.C. Многопозиционная радиолокация - М.: Радио и связь. 1998.
4. Меркулов В.И., Дрогалин В.В., Канащенков А.И. и др. Авиационные системы радиоуправления. Т. 2. Радиоэлектронные системы самонаведения. / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: Радиотехника, 2003. - 390 с.
5. Ярлыков М.С., Богачев А.С., Меркулов В.И., Дрогалин В.В. Радиоэлектронные комплексы навигации, прицеливания и управления вооружением. Т. 2. Применение авиационных радиоэлектронных комплексов при решении боевых и навигационных задач. / Под ред. М.С. Ярлыкова. - М.: Радиотехника, 2012. - 254 с.
6. Меркулов В.И., Садовский П.А. Алгоритмы фильтрации неодновременно приходящий измерений для двухпозиционной РЛС // Радиотехника. - 2014. - №7. - С. 28-32.
7. Меркулов В.И., Верба В.С., Ильчук А.Р. Автоматическое сопровождение воздушных объектов в РЛС интегрированных авиационных комплексов. Т. 1. Теоретические основы. РЛС в составе интегрированного комплекса / Под ред. В.С. Вербы - М.: Радиотехника, 2018. - 360 с.
8. Меркулов В.И. Алгоритм линейного оценивания с текущей коррекцией прогноза по неодновременного приходящим измерениям. // Информационно-измерительные и управляющие системы. - 2009. - №8.








Способ изменения направления и уменьшения расходимости излучения полупроводникового вертикально излучающего лазера
Способ временного закрепления подложек на технологическом основании
Сверхширокополосный радиолокатор с активной многочастотной антенной решеткой
Способ многоступенчатой фильтрации для систем автосопровождения
Способ подготовки кристаллической или поликристаллической подложки под металлизацию
Способ устранения несоответствия динамичности подсистем в составе сложных технических систем и система обеспечения бессрывного сопровождения интенсивно маневрирующей цели
Система автоматизированного модального управления бокового движения летательного аппарата
Способ изготовления межслойного перехода между печатными проводниками на кристаллической или поликристаллической подложке
Способ контроля поверхности
Способ регулировки яркости отображения информации на оптоэлектронном табло с жидкокристаллическим дисплеем
Способ и система совместной обработки измерений дальности и скорости для многодиапазонной радиолокационной системы кругового обзора
Датчик температуры электронного модуля
Способ и система идентификации измерений в многодиапазонных рлс
Робототехнический комплекс разминирования
Способ управления инерционным приводом антенны, обеспечивающий устойчивое сопровождение интенсивно маневрирующих и высокоскоростных летательных аппаратов с повышенной адаптацией к маневру носителя и система для его реализации
Способ временного закрепления подложек на технологическом основании
Сверхширокополосный радиолокатор с активной многочастотной антенной решеткой
Способ многоступенчатой фильтрации для систем автосопровождения
Способ подготовки кристаллической или поликристаллической подложки под металлизацию
Способ устранения несоответствия динамичности подсистем в составе сложных технических систем и система обеспечения бессрывного сопровождения интенсивно маневрирующей цели

