Результат интеллектуальной деятельности: САМОХОДНАЯ МАШИНА С ЭЛЕКТРИЧЕСКОЙ СИСТЕМОЙ ПРИВОДА
Вид РИД
Изобретение
Изобретение относится к самоходным транспортным и рабочим машинам, оснащенным собственными источниками энергии, электромеханической трансмиссией и приводами вспомогательных устройств, в том числе к тракторам, тягачам, сельскохозяйственным, строительно-дорожным и землеройно-транспортным машинам.
Известно транспортное средство с электротягой, в котором каждый из электроприводов движения содержит блок управления, силовой преобразователь и первый электромеханический блок, в состав которого входит исполнительный двигатель, редуктор и механический тормоз (RU 2022824 C1, B60L 11/00, 15.11.1994).
Его недостатком является высокая сложность конструкции и невысокая надежность, обусловленные наличием большого количества электрических и механических компонентов, а также ограниченные функциональные возможности, поскольку на этом транспортном средстве электрический привод используется только для обеспечения его движения.
Известны также электрические транспортные средства с функцией привода рабочего оборудования через вал отбора мощности (ВОМ), соединенный с электродвигателем (ЭД) привода хода. (ЕР 1805053 A1, B60K 17/28, B60L 50/30, 11.07.2007; KR 20180069512 А, B60K 17/02, B60K 17/22, B60K 17/28, B60L 11/18, F16H 1/14, 25.06.2018).
Недостатком этих транспортных средств является невысокие функциональные возможности, поскольку реализация отбора мощности на ВОМ от ЭД привода хода приводит к невозможности регулирования режимов работы рабочего оборудования независимо от управления движением транспортного средства.
Известен также электрический трактор, содержащий источник электрической энергии (аккумулятор), электродвигатели привода хода и ВОМ с контроллерами, сцепление, коробку передач, две раздаточные коробки, главный редуктор, дифференциал и силовой ответвитель. На этом тракторе предусмотрены независимое управление двумя ЭД от различных контроллеров (инверторов), а также возможность механического переключения режимов работы ЭД с направлением их потоков мощности либо на привод хода трактора, либо на ВОМ (CN 108146212 А, B60K 1/02, B60K 17/28, B60K 25/06, 12.06.2018; JP 2014143965 А, А01В 71/00, B60K 17/28, B60K 25/00, B60K 25/06, B60L 15/20, 14.08.2014).
В этой самоходной машине (тракторе) обеспечивается независимое управление приводом хода и ВОМ и, благодаря возможности работы двух ЭД на одну нагрузку, снижение установленной мощности ЭД. Однако реализация этого технического решения приводит к значительному усложнении трансмиссии трактора и снижению его надежности.
Наиболее близкой к предложенной является самоходная машина (гусеничный трактор) с электрической системой привода - с электромеханической трансмиссией и электрическим приводом рабочего оборудования, содержащая бортовой источник электрической энергии, выполненный в виде двигателя внутреннего сгорания (ДВС), механически соединенного с генератором, и/или аккумуляторной батареи, несколько электродвигателей (ЭД), приспособленных для привода гусениц машины и рабочего оборудования. Для управления каждым ЭД используется отдельный контроллер, соединенный с источником электрической энергии и содержащий процессор и силовой электронный коммутатор (RU 2547154 C1, B60K 17/14, B60L 7/20, B60L 11/00, B60K 6/00, 10.04.2015).
Использование для управления каждым ЭД отдельного контроллера с отдельными процессорами и отдельными силовыми электронными коммутаторами обеспечивает расширение функциональных возможностей этой системы за счет независимого управления каждым ЭД. Однако реализация этого технического решения приводит к значительному увеличению количества используемых компонентов, усложнению конструкции системы привода и снижению ее надежности.
Из анализа аналогов и прототипа следует, что в предшествующем уровне техники не решена техническая проблема создания самоходной машины с электрической системой привода, отличающаяся простотой конструкции, высокой надежностью и широкими функциональными возможностями. Задачей изобретения является создание такой машины.
Техническим результатом, обеспечиваемым изобретением, является упрощение конструкции и повышение надежности самоходной машины с электрической системой привода без снижения функциональных возможностей этой системы.
При этом под отсутствием снижения функциональных возможностей системы электропривода подразумевается возможность реализации электрическим приводом всех функций, которые необходимы для реализации самоходной машиной ее функционального назначения.
В самоходной машине с электрической системой привода, содержащей бортовой источник электрической энергии, выполненный в виде двигателя внутреннего сгорания (ДВС), механически соединенного с генератором, и/или аккумуляторной батареи, несколько электродвигателей (ЭД), по меньшей мере один из которых приспособлен для привода ее ведущих колес или гусениц, и по меньшей мере один контроллер, соединенный с источником электрической энергии и содержащий процессор и силовой электронный коммутатор, указанный технический результат достигается за счет того, что процессор и силовой электронный коммутатор по меньшей мере одного контроллера выполнены с возможностью управления по меньшей мере двумя ЭД.
Для достижения указанного технического результата в частных вариантах реализации изобретения:
- процессор выполнен с возможность приема и обработки выходных сигналов датчиков положения ротора двух или более ЭД и формирования сигналов управления ЭД в зависимости от этих сигналов;
- силовой электронный коммутатор содержит транзисторные ключи и обратные диоды, образующие N полумостов или несимметричных мостов, выходы которых через тиристоры соединены с обмоткам N-фазных ЭД, причем процессор выполнен с возможностью управления этими транзисторными ключами и тиристорами;
- самоходная машина дополнительно содержит по меньшей мере один ЭД привода ее рабочего оборудования и/или вентилятора и/или насоса системы охлаждения ДВС, а процессор и силовой электронный коммутатор по меньшей мере одного контроллера выполнены с возможностью управления двумя или более ЭД привода ее ведущих колес или гусениц, и/или рабочего оборудования, и/или вентилятора и/или насоса системы охлаждения ДВС;
- самоходная машина имеет электрический привод вала отбора мощности (ВОМ) и вентилятора системы охлаждения ДВС от одного ЭД;
- электродвигатель привода рабочего оборудования самоходной машины механически соединен с этим оборудованием через ВОМ и/или через одно или несколько механических и/или гидравлических передаточных устройств;
- механическое крепление ЭД к самоходной машине и его электрическое соединение с контроллером выполнены быстроразъемным с возможностью перемещения и соединения этого электродвигателя с задним, или передним, или боковым ВОМ в процессе эксплуатации самоходной машины;
- процессор выполнен с возможностью контроля скорости вращения и углового положения ротора каждого ЭД и формирования сигналов управления транзисторными ключами и тиристорами из условия увеличения крутящего/тормозного момента ЭД, имеющего соответственно наименьшую/наибольшую скорость вращения ротора и/или наибольшее отставание/опережение его углового положения относительно скорости вращения и углового положения ротора другого электродвигателя.
Реализация отличительных признаков независимого и зависимых пунктов формулы изобретения обеспечивает получение одного и того же технического результата.
В том числе реализация признака независимого пункта формулы изобретения, предусматривающего выполнение силового электронного коммутатора с возможностью управления двумя или более ЭД обеспечивает существенное упрощение конструкции и повышение надежности самоходной машины за счет значительного сокращения количества компонентов, используемых в этом коммутаторе. При этом конструктивное выполнение процессора с возможностью управления двумя или более ЭД позволяет обеспечить указанное упрощение конструкции и повышение надежности без снижения функциональных возможностей системы электропривода.
Реализация отличительного признака зависимого пункта формулы изобретения, в соответствии с которым процессор выполнен с возможность приема и обработки выходных сигналов датчиков положения ротора двух или более ЭД и формирования сигналов управления ЭД в зависимости от этих сигналов обеспечивает упрощение конструкции и повышение надежности самоходной машины с электрической системой привода без снижения функциональных возможностей этой системы за счет сокращения аппаратных средств, необходимых для обработки сигналов этих датчиков без снижения возможностей реализации алгоритмов этой обработки.
Реализация следующего отличительного признака зависимого пункта формулы изобретения, предусматривающего построение силового электронного коммутатора на основе транзисторных ключей и обратных диодов, образующих N полумостов или несимметричных мостов, выходы которых через тиристоры соединены с обмоткам N-фазных ЭД, обеспечивает упрощение конструкции и повышение надежности предложенного устройства за счет сокращения количества используемых силовых электронных компонентов и исключения необходимости применения электромеханических компонентов. При этом указанные соединения транзисторных ключей и тиристоров, а также их управление с помощью процессора, позволяют обеспечить указанное упрощение конструкции и повышение надежности без снижения функциональных возможностей электропривода.
Самоходная машина с соответствии с другим отличительным признаком зависимого пункта формулы кроме ЭД привода ведущих колес или гусениц дополнительно содержит ЭД привода ее рабочего оборудования, а также вентилятора и/или насоса системы охлаждения ДВС. При этом, в частности, реализован электрический привод ВОМ и вентилятора системы охлаждения ДВС от одного ЭД. В этом случае достигается увеличение количества ЭД, имеющих групповое управление, что также обеспечивает указанное упрощение конструкции и повышение надежности самоходной машины без снижения функциональных возможностей ее системы электропривода.
Механическое соединение ЭД с приводом рабочего оборудования самоходной машины через ВОМ и/или через одно или несколько механических и/или гидравлических передаточных устройств позволяет устанавливать этот ЭД на самоходную машину не во всех случаях, а только в случае необходимости, что также обеспечивает достижение указанного технического результата.
Реализация быстроразъемного механического крепления ЭД к самоходной машине с возможностью перемещения и соединения этого электродвигателя с задним, или передним, или боковым ВОМ в процессе эксплуатации самоходной машины, предусмотренное следующим отличительным признаком зависимого пункта формулы, позволяет использовать один ЭД для привода двух или трех ВОМ, что также обеспечивает достижение указанного технического результата.
В случае реализации последнего отличительного признака зависимого пункта формулы изобретения, согласно которому процессор обеспечивает контроль скорости вращения и углового положения ротора каждого ЭД и управление транзисторными ключами и тиристорами из условия увеличения крутящего/тормозного момента ЭД, имеющего соответственно наименьшую/наибольшую скорость вращения ротора и/или наибольшее отставание/опережение его углового положения относительно скорости вращения и углового положения ротора другого электродвигателя, упрощение конструкции и повышение надежности самоходной машины без снижения ее функциональных возможностей достигается за счет обеспечения возможности реализации алгоритмов группового управления с помощью одного контроллера.
В предложенной самоходной машине могут быть реализованы отличительные признаки, в том числе альтернативные, как независимого, так и зависимых пунктов формулы изобретения в их любом сочетании.
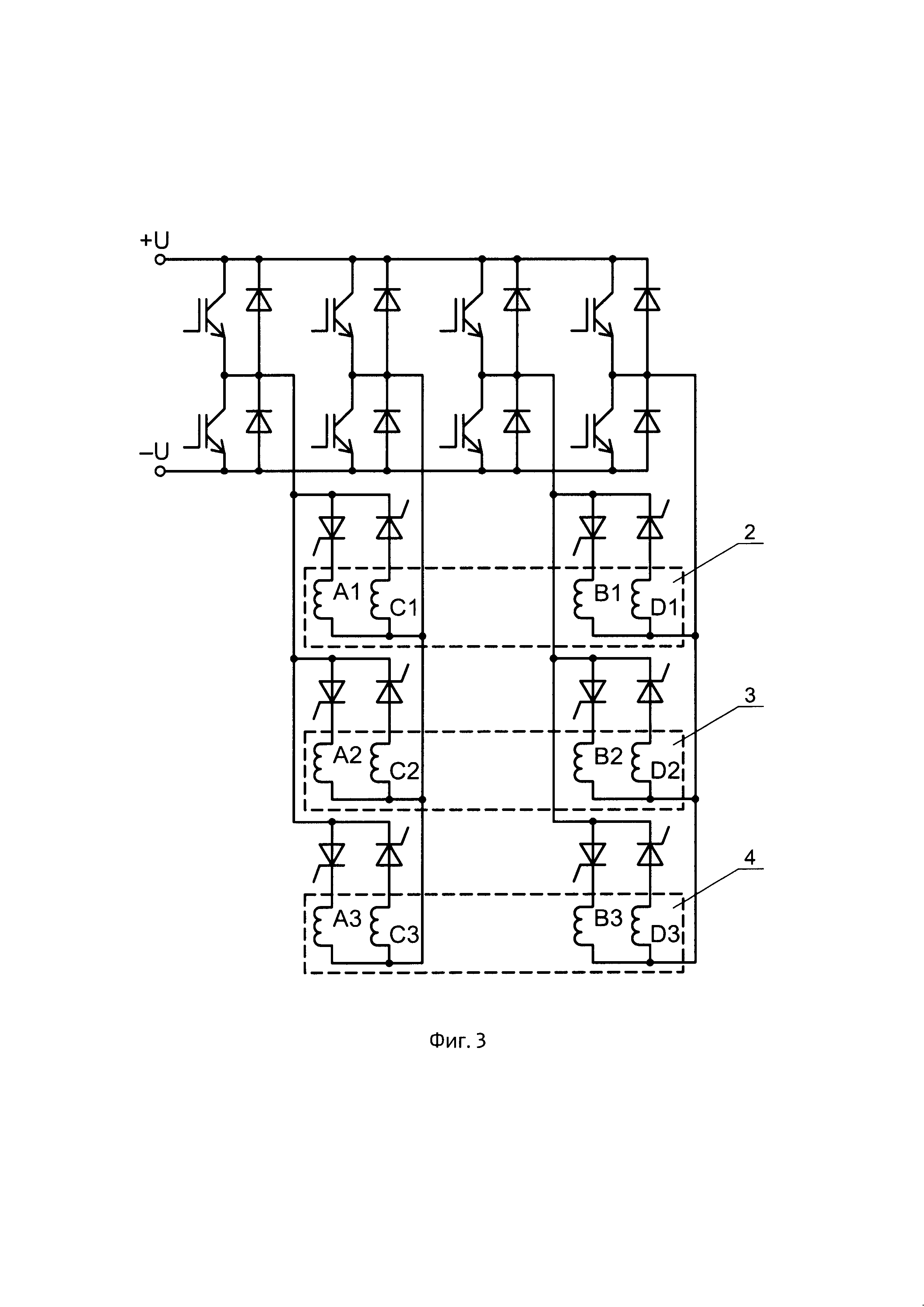
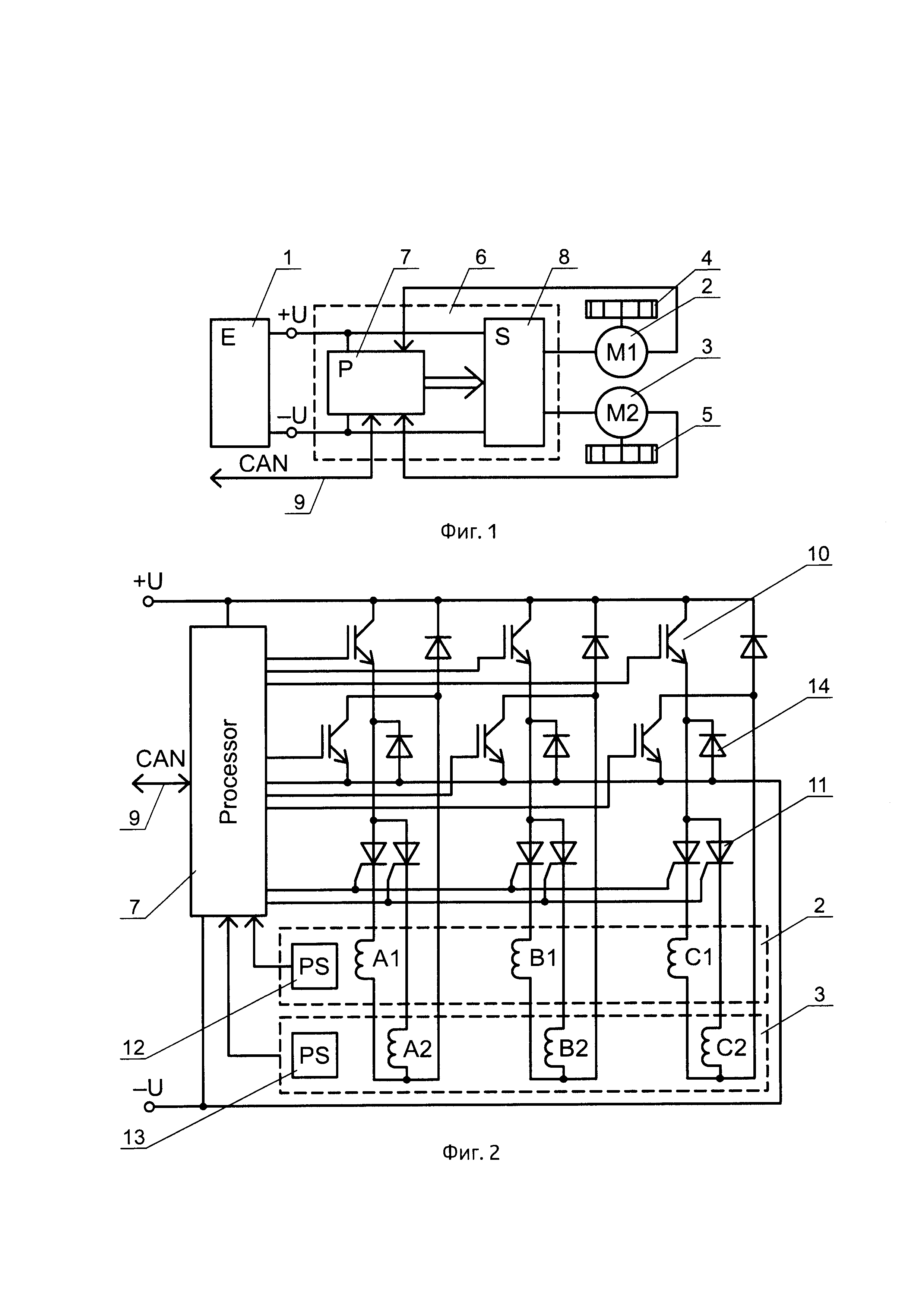
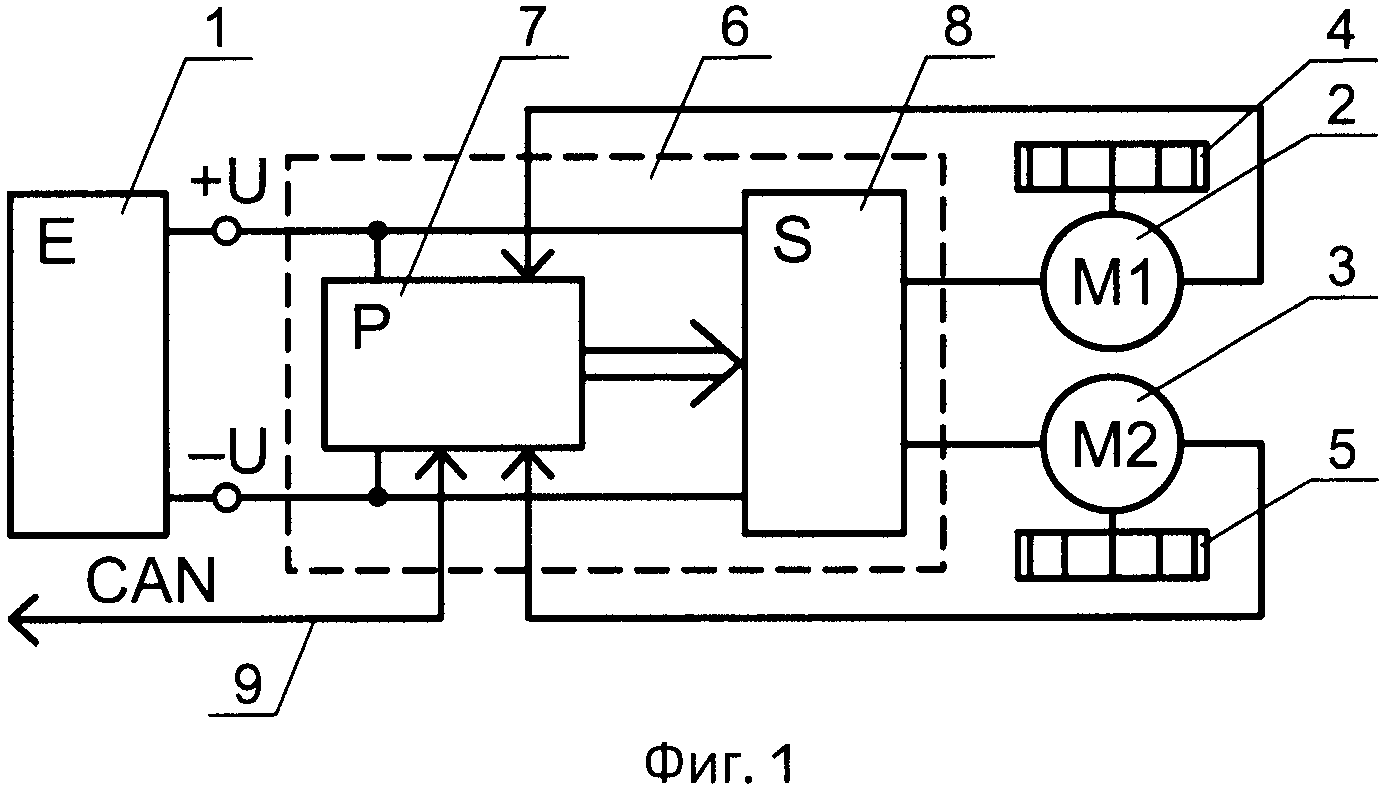
Для пояснения технической сущности, принципа действия и возможности осуществления предложенного устройства на фиг. 1 в качестве примера показана упрощенная схема электрической системы привода гусениц или колес самоходной машины с автономным источником энергии. На фиг. 2 приведен пример реализации контроллера, предназначенного для управления двумя трехфазными ЭД, а на фиг. 3 - пример реализации силового электронного коммутатора, обеспечивающего управления тремя четырехфазными ЭД.
Самоходная машина с электрической системой привода содержит бортовой источник электрической энергии 1, выполненный в виде двигателя внутреннего сгорания (ДВС), механически соединенного с генератором, или аккумуляторной батареи (АКБ), или одновременно ДВС с генератором и АКБ. В состав машины входят несколько ЭД. Например, два электродвигателя 2, 3, показанные на фиг. 1, фиг. 2, три электродвигателя 2, 3, 4, показанные на фиг. 3 или большее количество ЭД.
Предпочтительным является применение реактивных (индукторных, индукционных) электродвигателей (ВРД, ВИД, ВИРД), не имеющих постоянных магнитов и электромагнитов в роторе и статоре. Они содержат корпус, в котором размещены статор с полюсами и фазными обмотками, выполненными в виде сосредоточенных катушек, размещенных на полюсах магнитопровода статора, и ротор с зубчатым магнитопроводом. В англоязычной литературе такие ЭД называются электродвигателями с переменным магнитным сопротивлением: «Switched Reluctance Motor (SRM)».
Возможно также применение ЭД любого другого типа, в том числе асинхронных, синхронных с постоянными магнитами в роторе, именуемыми на английском языке «Permanent Magnet Synchronous Motor (PMSM)», ЭД с поперечным магнитным потоком: «Transverse Flux Machine» (TFM) и т.д.
Один или несколько ЭД, например 2, 3, используются для привода ведущих колес или гусениц 5, 6 самоходной машины. Соединение ЭД с ведущими звездочками или колесами 5, 6 может осуществляться непосредственно или через различные механические устройства (передачи)- бортовые редукторы, коробки передач, главную передачу, карданные валы, муфты, бортовые фрикционы и т.д. Торможение самоходной машины может осуществляться как с помощью ЭД, так и с помощью дополнительных фрикционных тормозов, соединенных с выходными валами ЭД, ведущими колесами, входными валами бортовых редукторов и т.п.
Системы электрического привода самоходной машины содержит также контроллеры, подключенные к источнику электрической энергии 1 и обеспечивающие управляемую передачу электрической энергии от этого источника на ЭД 2, 3 (фиг. 1, фиг. 2) или 2, 3, 4 (фиг. 3).
Под контроллером в данном случае подразумевается аппарат управления для пуска, останова, реверсирования и регулирования скорости вращения электродвигателей. Он предназначен для управления ЭД и, в случае необходимости, другими устройствами путем получения информации в виде цифровых данных, аналоговых или дискретных сигналов от ЭД и внешних устройств, преобразования этой информации по специальному алгоритму и выдачи управляющих воздействий в виде цифровых или аналого-дискретных сигналов.
Контроллер может именоваться также инвертором, блоком управления, преобразователем электрической энергии, частотным преобразователем, электронной системой управления и т.п.
По меньшей мере один контроллер 6 содержит процессор 7 и силовой электронный коммутатор 8, конструктивно реализованные с учетом возможности управления по меньшей мере двумя или более электродвигателями от одного контроллера, т.е. группового управления ЭД. Прочие контроллеры могут иметь аналогичную, либо любую другую конструкцию. Например, они могут обеспечивать управление одним ЭД, а также управление различными электрическими нагрузками системы электрооборудования самоходной машины - устройствами освещения, предпусковой подготовки и запуска ДВС, поддержания микроклимата в кабине и т.д.
Возможны различные комбинации подключения электродвигателей различных приводов к одному контроллеру. Например, к одному контроллеру могут подключены один или два ЭД привода ведущих колес или гусениц и один ЭД привода рабочего оборудования. Возможно подключение к одному контроллеру одного ЭД вентилятора системы охлаждения ДВС и ЭД привода рабочего оборудования. К одному контроллеру могут быть также подключены ЭД насоса системы охлаждения ДВС и ЭД привода рабочего органа и т.д.
В отдельных случаях электрический привод различных узлов и агрегатов самоходной машины может осуществляться от одного ЭД. Допустимость такого совмещения определяется требованиями к алгоритмам управления этими узлами и агрегатами.
Например, если на самоходной машине должен постоянно работать ВОМ, либо если остановки ВОМ могут быть лишь кратковременными, то привод ВОМ может быть совмещен, например, с приводом вентилятора или насоса системы охлаждения ДВС. В этом случае выходной вал ЭД через механические передаточные устройства (ременные или зубчатые передачи, муфты, карданные валы и т.п.) соединяется с ВОМ и указанным вентилятором или насосом.
Электродвигатель привода рабочего оборудования самоходной машины может быть механически соединен с этим оборудованием через ВОМ. Это соединение возможно через механические и/или гидравлические передаточные устройства - через муфту, редуктор, ременную передачу, карданный вал, гидронасос с гидроцилиндром и т.д.
Под рабочим оборудованием в данном случае подразумевается комплект узлов и элементов, устанавливаемых на самоходную (базовую машину) для выполнения ее основной функции в соответствии с назначением машины. Например, рабочий орган, рычаги, гидроцилиндры, канатно-блочное устройство и т.п.
Рабочее оборудование состоит из одного или нескольких рабочих органов, а также деталей и узлов, обеспечивающих его движение и ориентацию в пространстве. Рабочий орган взаимодействует со средой, для работы в которой создана самоходная машина (почвой, грунтом и т.д.), а соединительные и крепежные элементы (подвеска) обеспечивают его конструктивную связь с самоходной машиной. Рабочее оборудование оснащено силовой трансмиссией с электрическим приводом, снабжающей рабочий орган энергией и позволяющей управлять его положением в пространстве.
Механическое крепление ЭД к самоходной машине, а также его электрическое соединение с контроллером, могут быть быстроразъемными для обеспечения возможности его перемещения в процессе эксплуатации машины и использования для привода различных узлов и механизмов. В частности, ЭД привода заднего ВОМ может быть отсоединен от него, перемещен на другое место крепления на самоходной машине и соединен с ее передним, или боковым ВОМ, причем как во время эксплуатации самоходной машины, так и во время ее подготовки к этой эксплуатации.
Система электрического привода (электрооборудования) может содержать также различные датчики рабочих параметров самоходной машины, панель оператора, органы управления и т.д.
Сигналы контроля и управления между контроллерами и другими электронными устройствами в этой системе могут предаваться как по отдельным проводам, так и по мультиплексной линии передачи информационных сигналов 9. Например, выполненной с использованием стандарта промышленной сети CAN (Controller Area Network - сеть контроллеров).
Процессор 7 выполнен, как правило, на основе программируемого микроконтроллера или цифрового сигнального процессора и может содержать одно или несколько процессорных ядер, интегрированную оперативную память и Flash-память программ, встроенные аналого-цифровые преобразователи (АЦП), модули формирования широтно-модулированных сигналов (ШИМ), гальванически развязанные драйверы транзисторных ключей 10 и тиристоров 11 силового электронного коммутатора 8 и набор коммуникационных интерфейсов, обеспечивающих прием сигналов с датчиков положения ротора 12, 13 и датчиков тока и температуры фазных обмоток электродвигателей 2, 3 и обмен информацией по шине CAN 9 с другими составными частями системы электрического привода самоходной машины.
Процессор реализован из условия обеспечения возможности быстрого захвата сигналов с датчиков положения ротора 12, 13 электродвигателей 2, 3, и датчиков тока в их фазных обмотках, контроля напряжения на этих обмотках и напряжения на шинах автономного источника энергии 1, формирования сигналов управления драйверами транзисторных ключей 10 и тиристоров 11 в ответ на изменения контролируемых параметров ЭД в реальном масштабе времени, защиты транзисторных ключей, тиристоров и обмоток ЭД от аварийных режимов (от перегрева, превышения тока и напряжения и т.п.), а также решения общих задач в системе электропривода.
Датчик положения ротора 12, 13 может быть выполнен в виде магнитного энкодера. В этом случае он содержит постоянный магнит с диаметральным намагничиванием, прикрепленный к торцу вала ротора, и микросхему магнитного энкодера. Возможна также реализация датчика положения ротора на основе вращающегося трансформатора, оптического энкодера, дискретных оптических или магнитных переключателей, например трех оптронов с открытым оптическим каналом или датчиков Холла.
Транзисторные ключи 10 силового электронного коммутатора 8 выполнены, как правило, на биполярных транзисторах (модулях) с изолированным затвором (IGBT). Вместе с обратными диодами 14 они образуют N несимметричных мостов (фиг. 2) или N полумостов (фиг. 3), выходы которых через тиристоры 11 соединены с фазными обмоткам трехфазных или четырехфазных (N-фазных) электродвигателей.
На фиг. 2 показано подключение силового электронного коммутатора 8, реализованного по несимметричной мостовой схеме, к двум 3-фазным ЭД (обмотки фаз А1, B1, С1 первого ЭД и обмотки фаз А2, В2, С2 второго ЭД) (N=3), а на фиг. 3 - подключение коммутатора 8, реализованного на основе симметричных транзисторных полумостов, к трем 4-фазным вентильно-индукторным электродвигателям (обмотки фаз: A1, B1, C1, D1; А2, В2, С2, D2 и A3, B3, С3, D3).
В силовом электронном коммутаторе возможно как независимое управление каждым тиристором 11, так и групповое управление тиристорами, осуществляющими подключение каждого ЭД к транзисторным ключам, как это показано на фиг. 2.
Если в системе привода самоходной машины используют асинхронные ЭД, синхронные ЭД с постоянными магнитами в роторе (PMSM) или ЭД с поперечным магнитным потоком (TFM), то применяются симметричные тиристоры 11, проводящие ток в обоих направлениях, а транзисторные ключи и обратные диоды силового электронного коммутатора 8 соединены по схеме симметричных мостов или полумостов (фиг. 3).
Система электрооборудования (электрического привода) может содержать также различные дополнительные устройства и элементы, условно не показанные на чертеже. В том числе обеспечивающие контроль и защиту составных частей электрического привода, запуск ДВС, автоматизированное и дистанционное управление и т.д.
Предложенная самоходная машина с электрической системой привода работает следующим образом.
Перед началом движения машины оператор (машинист, тракторист и т.п.) с помощью пульта управления, условно не показанного на чертежах, осуществляет запуск ДВС, если бортовой источник электрической энергии выполнен на его основе. ДВС приводит во вращение ротор генератора. Его выходное напряжение с помощью силового выпрямителя (контроллера генератора) преобразуется в напряжение постоянного тока +U, -U, поступающее на силовые шины системы электрического привода и выводы питания контроллера 6. Если бортовой источник электрической энергии выполнен на основе аккумуляторной батареи (АКБ), то напряжение на силовые шины поступает от АКБ.
Далее оператор с помощью пульта управления формирует сигналы задания скорости и направления движения самоходной машины.
Контроллер 6 работает по программе, записанной в памяти его микроконтроллера или цифрового сигнального процессора, и формирует сигналы на драйверы транзисторных ключей и тиристоров в соответствии с сигналами управления, полученными от пульта управления по шине CAN, сигналами датчиков положения роторов 12, 13, датчиков токов в фазных обмотках ЭД и других датчиков системы электропривода, условно не показанных на чертежах.
Драйверы в соответствии с полученными импульсами управления формируют напряжения на затворах транзисторных ключей 10 и токи управляющих электродов тиристоров 11, обеспечивая их включение/выключение в соответствующие моменты времени. Транзисторные ключи 10 через тиристоры 11 попеременно подключают фазные обмотки ЭД к силовым шинам +U, -U, обеспечивая преобразование напряжения постоянного тока +U, -U на силовых шинах в переменное напряжение или в однополярные импульсы регулируемой частоты, что приводит к протеканию тока по фазным обмоткам ЭД 2, 3 и возникновению крутящего момента ЭД.
Регулирование величины этого момента осуществляет путем изменения величины тока в фазных обмотках ЭД за счет изменения длительности или скважности включения транзисторных ключей 10 с учетом необходимых углов опережения их включения. В простейшем случае это осуществляется путем реализации гистерезисного регулятора - включения и отключения транзисторных ключей в зависимости о величин токов в фазных обмотках.
В начале работы и при низких скоростях вращения роторов вентильно-индуторных ЭД для ограничения тока и развиваемого момента электрической машины осуществляется широтно-импульсное (ШИМ) регулирование токов в фазных обмотках.
Под действием этого момента ротор начинает вращаться и через механическую передачу (при ее наличии) приводит в движение колеса или гусеницы транспортной или тяговой самоходной машины.
Аналогичным образом по командам, поступающим на контроллер с пульта управления, осуществляется запуск ВОМ и рабочего оборудования машины.
Вентилятор и насос системы охлаждения ДВС включаются контроллером автоматически в зависимости от выходных сигналов бортовых датчиков (угловой скорости ДВС, температуры охлаждающей жидкости и т.д.).
При торможении самоходной машины и/или ее рабочего оборудования ЭД под управлением контроллера переходят в генераторный режим. Кинетическая энергия машины и/или рабочего оборудования, преобразованная в электрическую (энергия торможения), с ЭД через контроллер передается на силовые шины, что приводит к повышению напряжения на них и к передаче энергии торможения в бортовой источник электрической энергии (в АКБ или в ДВС). В случае необходимости в системе электрического привода устанавливается тормозной резистор, который под управлением соответствующего контроллера поглощает избыток энергии торможения, предотвращая превышение напряжения на силовых шинах.
При прямолинейном движении самоходной машины необходимо обеспечить синхронность вращения роторов электродвигателей 2, 3. Поскольку их управление осуществляется от одного электронного коммутатора 8, процессор 7 должен обеспечить формирование сигналов управления транзисторными ключами 10 и тиристорами 11 из условия обеспечения синхронности вращения роторов этих ЭД.
Возможен следующий вариант реализации алгоритма такого управления.
После получения команды на движение машины процессор 7 на основании выходных сигналов датчиков положения роторов 12, 13 определяет тот ЭД (2 или 3) ротор которого нужно повернуть в направлении, соответствующем предстоящему направлению движения самоходной машины до достижения согласованного положения роторов. Например, ЭД 2 (см. фиг. 1)
Далее процессор формирует сигналы включения тиристоров 11, соединенных с обмотками ЭД 2. При этом тиристоры, соединенными с фазными обмотками ЭД 3, остаются выключенными. Далее процессор 7 формирует сигналы управления транзисторными ключами 10 тех фаз ЭД 2, протекание тока по которым приводит к созданию крутящего момента и движению ротора ЭД 2 в нужном направлении. Это приводит к повороту ротора ЭД 2 в направлении, соответствующем уменьшению рассогласования положений роторов ЭД 2 и ЭД 3.
После достижения их согласованного положения процессор 7 осуществляет включение всех тиристоров 11, выходные токи транзисторных ключей 10 начинают протекать по фазным обмоткам обоих ЭД 2, 3, тяговое усилие создается обоими ЭД и самоходная машина приходит в движение.
При этом из-за различия нагрузок на ведущие колеса или гусеницы левого и правого борта машины, обусловленного уклонами и неровностями трассы движения и неоднородностью грунта, неидентичности характеристик ЭД и т.д., ротор одного из ЭД (2 или 3) начинает отставать относительно положения ротора другого ЭД.
Это отставание (запаздывание) выявляется процессором путем обработки сигналов датчиков положения ротора 12, 13. После этого процессор 7 переходит в режим управления транзисторными ключами 10 из условия их включения и отключения в моменты времени, при которых достигается более высокое значение крутящего момента отстающего ЭД. В этом случае моменты подачи напряжений на фазные обмотки опережающего ЭД отличаются от оптимальных. В результате этого крутящий момент отстающего ЭД, становится больше, чем опережающего, что приводит к восстановлению синхронности вращения роторов ЭД.
Информация о положении роторов ЭД представлена в цифровой форме. Поэтому для коммутации фазных обмоток процессор реализует алгоритм логического преобразования сигналов датчиков положения в сигналы управления драйверами транзисторных ключей и тиристоров, записанный в его Flash-памяти программ. Этот алгоритм может быть представлен, в частности, в виде математических формул или таблиц.
В процессе движения самоходной машины процессор 7 контролирует скорости и угловые положения роторов обоих ЭД и, в случае выявления рассогласования, автоматически переходит к формированию сигналов управления транзисторными ключами в те моменты времени, которые соответствуют более высокому значению крутящего момента отстающего ЭД. Это приводит к автоматическому восстановлению синхронности вращения роторов обоих ЭД.
Для осуществления поворота самоходной машины процессор 7 отключает сигнал управления тиристорами 11 и соответственно, фазные обмотки ЭД отстающего борта. При этом электрический привод выходит из режима синхронного вращения ЭД.
В этом режиме возможно кратковременное включение тиристоров ЭД привода отстающего борта в моменты времени, соответствующие как двигательному, так и генераторному режиму его работы. Это приводит к соответствующему изменению радиуса поворота самоходной машины.
Другим возможным алгоритмом управления ЭД 2, 3 в режиме поворота самоходной машины является поочередное включение ЭД левого и правого борта, т.е. переключение ЭД путем изменения сигналов управления тиристорами и транзисторными ключами с установлением соотношения времени включения фазных обмоток каждого ЭД в соответствии с заданным радиусом поворота. При этом возможно дополнительное регулирование крутящего момента каждого ЭД путем изменения времени (угла) включения тиристоров 11.
Управление ЭД в режиме торможения осуществляется аналогичным образом. Если при торможении необходимо обеспечить прямолинейное движение самоходной машины, то процессор 7 обеспечивает синхронизацию скоростей вращения и угловых положений роторов ЭД привода левого и правого бортов. В этом случае формирование сигналов управления транзисторными ключами и тиристорами осуществляется из условия увеличения тормозного момента того ЭД, ротор которого имеет наибольшую скорость вращения и/или наибольшее опережение углового положения относительно скорости вращения и углового положения ротора другого ЭД.
Аналогичным образом контроллер 6 реализует управление ЭД привода рабочего оборудования, вентилятора и насоса системы охлаждения ДВС и т.д. Причем если к одному контроллеру подключены три или более ЭД, то процессор 7 путем обработки выходных сигналов датчиков положения их роторов определяет ЭД с наибольшим отставанием угла поворота и скорости вращения ротора и далее формирует сигналы управления ключами из условия увеличения крутящего момента отстающего ЭД, осуществляя синхронизацию вращения роторов всех ЭД.
Наиболее эффективные алгоритмы управления транзисторными ключами и тиристорами, в том числе в динамических режимах их работы, могут быть определены расчетным и экспериментальным путем и записаны в энергонезависимую память процессора 7.
Одновременно процессор 7 с помощью датчиков температуры, тока и напряжения осуществляет контроль параметров и режимов работы ЭД и силового электронного коммутатора 8 и реализует алгоритмы их защиты от аварийных режимов, в том числе от перегрева транзисторных ключей и тиристоров, перегрева фазных обмоток, а также защиту от перегрузок силовых транзисторных ключей и тиристоров по току и по напряжению. Алгоритмы защиты предусматривают отключение сигналов управления транзисторных ключей и тиристоров в случае, если величина контролируемого параметра превышает предварительно установленную максимально допустимую величину.
Для специалистов в данной области техники понятно, что кроме описанных вариантов самоходной машины с электрической системой привода возможны также иные варианты ее реализации на основе признаков, изложенных в формуле изобретения.
Ограничитель нагрузки грузоподъемного крана
Многофункциональное устройство грузоподъемной машины
Устройство горизонтирования люльки автоподъемника
Ограничитель нагрузки грузоподъемной машины
Система управления землеройно-транспортной машины
Гидравлическая система машины с гидростатической трансмиссией
Землеройно-транспортная машина с гидростатической трансмиссией
Самоходная рабочая машина с электромеханической трансмиссией
Трактор с регистратором параметров
Система контроля гидростатической трансмиссии машины
Ограничитель нагрузки грузоподъемного крана
Многофункциональное устройство грузоподъемной машины
Устройство горизонтирования люльки автоподъемника
Ограничитель нагрузки грузоподъемной машины
Система управления землеройно-транспортной машины
Гидравлическая система машины с гидростатической трансмиссией
Землеройно-транспортная машина с гидростатической трансмиссией
Самоходная рабочая машина с электромеханической трансмиссией
Трактор с регистратором параметров
Система контроля гидростатической трансмиссии машины

