Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу помощи при парковке и к оборудованию помощи при парковке.
Уровень техники
[0002] Известно оборудование управления помощью при парковке, которое выполнено с возможностью задавать целевую скорость таким образом, чтобы уменьшать скорость транспортного средства по мере того, как транспортное средство приближается к целевой позиции для парковки, и управлять торможением таким образом, что транспортное средство движется на целевой скорости (см., например, патентный документ 1: WO 2007/013246).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. WO 2007/013246
Сущность изобретения
Задачи, решаемые изобретением
[0004] Когда транспортное средство приближается вплотную к целевой позиции для парковки, если отклонение транспортного средства относительно места для парковки является большим, водитель или пассажир транспортного средства обычно может испытывать определенное некомфортное ощущение. Это также является истинным при парковке транспортного средства в целевой позиции для парковки путем автоматизированного вождения.
[0005] Задача, которая должна решаться посредством настоящего изобретения, заключается в том, чтобы предоставлять способ помощи при парковке и оборудование помощи при парковке, которые позволяют смягчать некомфортное ощущение, возникающее у водителя или пассажира транспортного средства при парковке транспортного средства путем автоматизированного вождения.
Средство решения задач
[0006] Настоящее изобретение решает вышеуказанную задачу посредством увеличения величины управления углом рыскания транспортного средства относительно целевого пути для парковки, чтобы увеличивать величину регулирования угла транспортного средства относительно целевой позиции для парковки, в соответствии с уменьшением оставшегося расстояния до целевой позиции для парковки транспортного средства.
Преимущества изобретения
[0007] Согласно настоящему изобретению, можно облегчать некомфортное ощущение, возникающее у водителя или пассажира транспортного средства, при парковке транспортного средства путем автоматизированного вождения.
Краткое описание чертежей
[0008] Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию оборудования помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 2 является блок-схемой для описания функций ECU помощи при парковке по фиг. 1.
Фиг. 3 является схемой для описания управления, при котором рассматриваемое транспортное средство управляется с возможностью следовать пути для парковки.
Фиг. 4 является схемой для описания модифицированного примера способа вычисления второго члена уравнения для вычисления целевого угла поворота при рулении, представленного посредством следующего уравнения (1).
Фиг. 5 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления помощью при парковке, выполняемую посредством оборудования помощи при парковке по фиг. 1.
Фиг. 6 является блок-схемой для описания функций ECU помощи при парковке согласно другому варианту осуществления настоящего изобретения.
Фиг. 7 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления помощью при парковке, выполняемую посредством оборудования помощи при парковке согласно другому варианту осуществления настоящего изобретения.
Режим(ы) осуществления изобретения
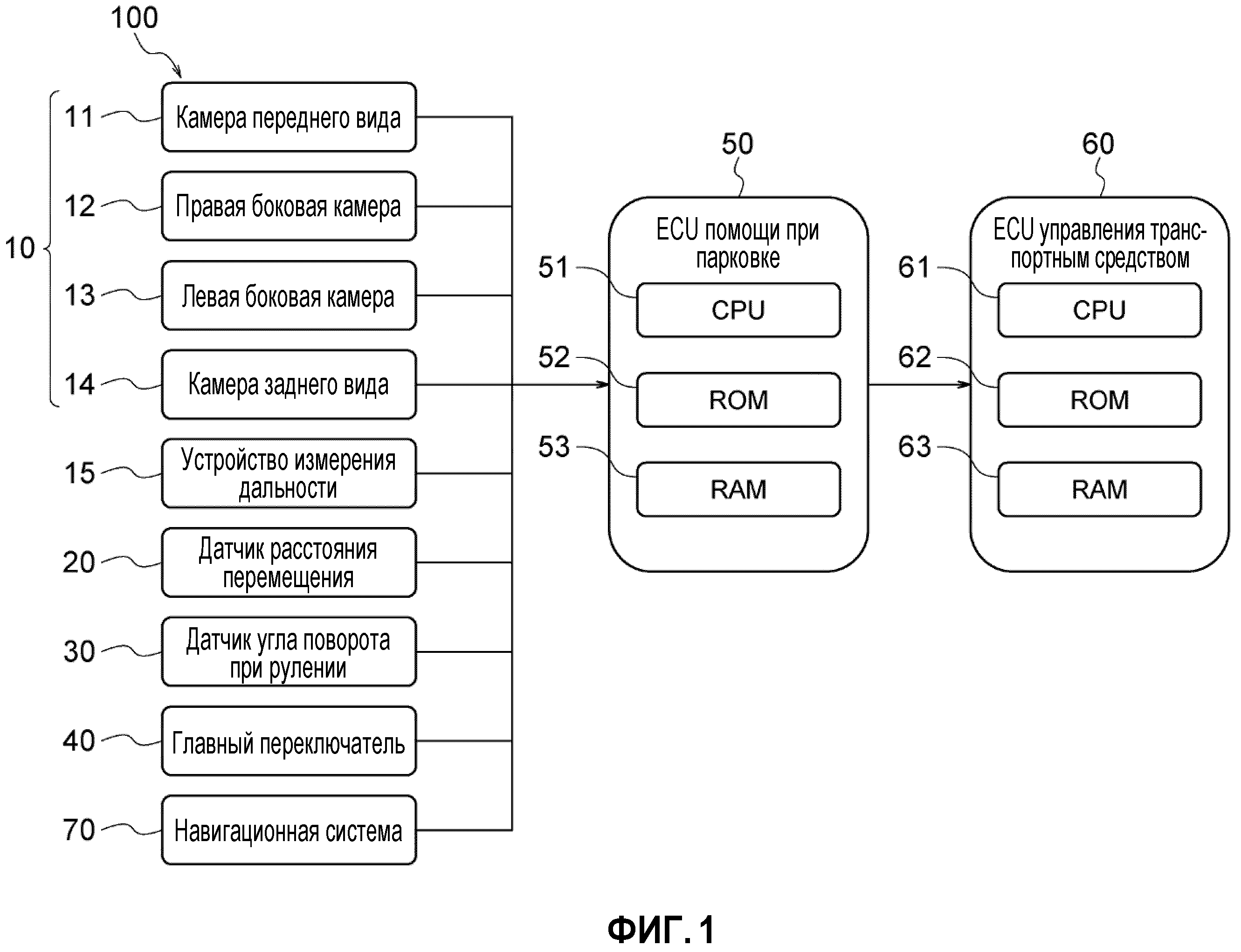
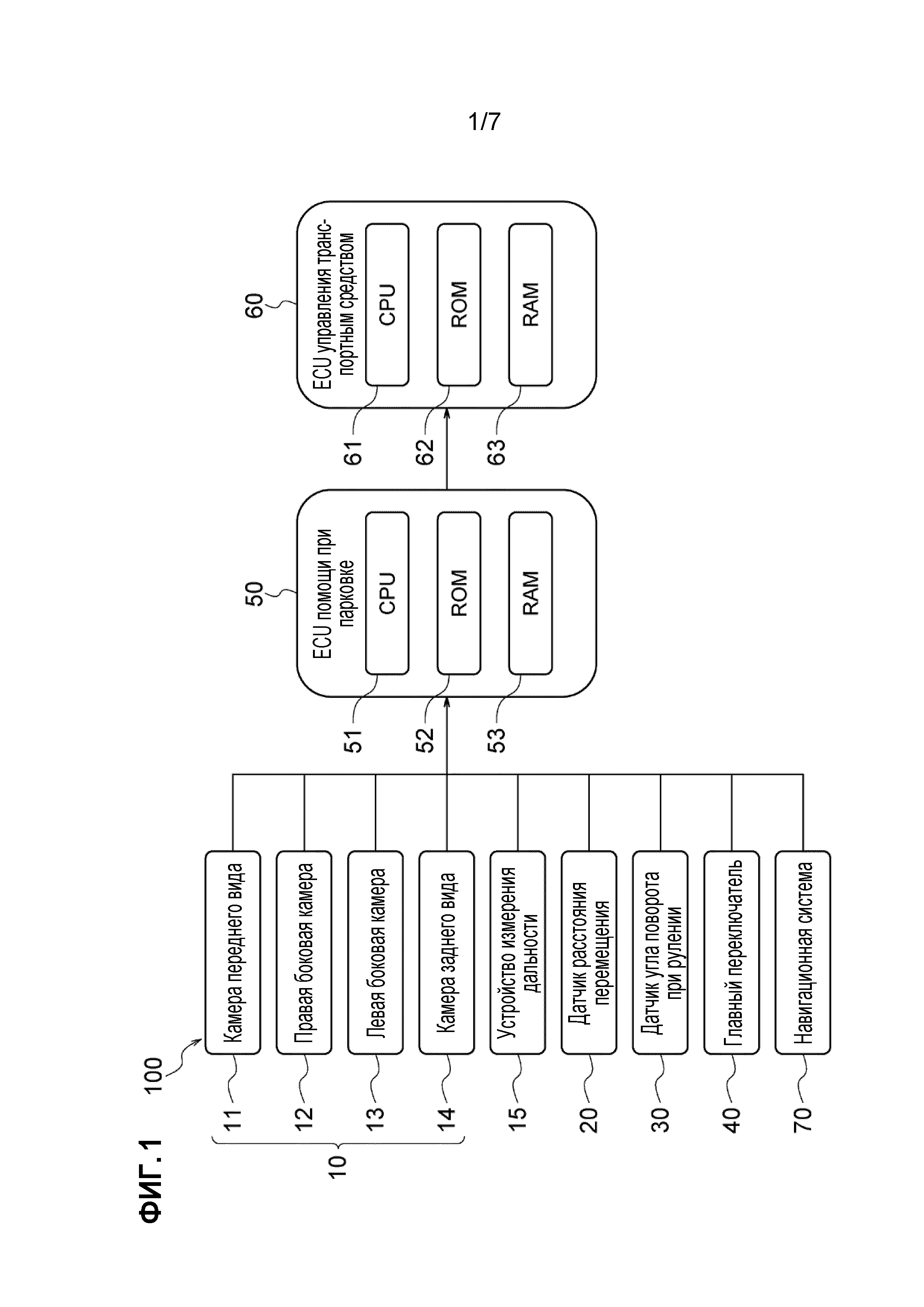
[0009] В дальнейшем в этом документе, описываются один или более вариантов осуществления настоящего изобретения со ссылкой на чертежи. Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию оборудования 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения. Оборудование 100 помощи при парковке, которое оснащено в транспортном средстве, помогает в операции перемещения (парковки) транспортного средства на место для парковки. Оборудование 100 помощи при парковке может достигать операции парковки транспортного средства посредством удаленного управления. Например, водитель или пассажир транспортного средства может вводить команду для того, чтобы начинать помощь при парковке, в устройство удаленного управления, такое как удаленный контроллер или мобильный терминал, за пределами транспортного средства, чтобы за счет этого достигать операции парковки транспортного средства.
[0010] Оборудование 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения содержит набор 10 камер, устройство 15 измерения дальности, датчик 20 расстояния перемещения, датчик 30 угла поворота при рулении, главный переключатель 40, электронный модуль 50 управления (ECU) для помощи при парковке, ECU 60 управления транспортным средством и навигационную систему 70. Оборудование 100 помощи при парковке дополнительно содержит аппаратные модули (не проиллюстрированы), такие как ECU управления двигателем и ECU усиления за счет мощности для руления, которые обычно оснащаются в транспортном средстве. Эти компоненты соединяются друг с другом через контроллерную сеть (CAN) или другую бортовую LAN, чтобы взаимно обмениваться информацией.
[0011] Набор 10 камер содержит камеру 11 переднего вида, правую боковую камеру 12, левую боковую камеру 13 и камеру 14 заднего вида, например, как проиллюстрировано на чертеже. Камера 11 переднего вида, которая устанавливается на переднем бампере транспортного средства либо в его окрестности, захватывает изображения впереди рассматриваемого транспортного средства и выводит информацию изображений в ECU 50 помощи при парковке. Правая боковая камера 12, которая устанавливается на правой стороне транспортного средства (например, в правосторонней части передней части транспортного средства), захватывает изображения на правой стороне рассматриваемого транспортного средства и выводит информацию изображений в ECU 50 помощи при парковке. Левая боковая камера 13, которая устанавливается на левой стороне транспортного средства (например, в левосторонней части передней части транспортного средства), захватывает изображения на левой стороне рассматриваемого транспортного средства и выводит информацию изображений в ECU 50 помощи при парковке. Камера 14 заднего вида, которая устанавливается на заднем бампере транспортного средства либо в его окрестности, захватывает изображения позади рассматриваемого транспортного средства и выводит информацию изображений в ECU 50 помощи при парковке.
[0012] Устройство 15 измерения дальности представляет собой радарное устройство или сонар, такое как радар миллиметрового диапазона, лазерный радар или ультразвуковой радар. Устройство 15 измерения дальности устанавливается в позиции, идентичной позиции любой из камер 11-14, и обнаруживает присутствие или отсутствие объектов, таких как помехи, пешеходы и другие транспортные средства около транспортного средства, позиции объектов и расстояния до объектов.
[0013] Датчик 20 расстояния перемещения вычисляет величину перемещения рассматриваемого транспортного средства и выводит ее в ECU 50 помощи при парковке. Датчик 20 расстояния перемещения может быть сконфигурирован, например, с использованием датчика скорости вращения и т.п., который определяет скорость вращения колеса рассматриваемого транспортного средства.
[0014] Датчик 30 угла поворота при рулении, который установлен в рулевой колонке, например, определяет угол вращения руля и выводит его в ECU 50 помощи при парковке.
[0015] Главный переключатель 40 представляет собой переключатель, который нажимается пользователем, чтобы инструктировать начало помощи при парковке. Когда главный переключатель 40 не нажимается, он выводит сигнал выключения в ECU 50 помощи при парковке, а когда главный переключатель 40 нажимается, он выводит сигнал включения в ECU 50 помощи при парковке. Главный переключатель 40 устанавливается, например, в местоположении на устройстве удаленного управления, таком как удаленный контроллер или мобильный терминал, который носится водителем или пассажиром, который выполняет удаленное управление за пределами транспортного средства, в местоположении, в котором водитель может нажимать главный переключатель 40 в транспортном средстве, к примеру, в местоположении около приборной панели рассматриваемого транспортного средства или около руля либо в другом соответствующем местоположении. Главный переключатель 40 может представлять собой программный переключатель, предоставленный на экране мобильного терминала, такого как смартфон, допускающий обмен данными с транспортным средством через сеть, программный переключатель, предоставленный на экране навигационного устройства, либо другой соответствующий переключатель.
[0016] ECU 50 помощи при парковке представляет собой контроллер, который всесторонне управляет оборудованием 100 помощи при парковке. ECU 50 помощи при парковке содержит ROM 52, которое сохраняет программу помощи при парковке, CPU 51 в качестве функциональной схемы, которая выполняет программу, сохраненную в ROM 52, так что она служит в качестве оборудования 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения, и RAM 53, которое служит в качестве доступного устройства хранения данных. ECU 50 помощи при парковке, в который вводится информация по обнаружению из набора 10 камер, устройства 15 измерения дальности, датчика 20 расстояния перемещения, датчика 30 угла поворота при рулении и главного переключателя 40, вычисляет целевой угол поворота при рулении и целевую скорость транспортного средства для рассматриваемого транспортного средства и выводит их в ECU 60 управления транспортным средством.
[0017] ECU 60 управления транспортным средством представляет собой контроллер, который выполняет управление движением транспортного средства. ECU 60 управления транспортным средством содержит ROM 62, которое сохраняет программу управления движением транспортного средства, CPU 61 в качестве функциональной схемы, которая выполняет программу, сохраненную в ROM 62, так что она служит в качестве устройства управления транспортного средства, и RAM 63, которое служит в качестве доступного устройства хранения данных. ECU 60 управления транспортным средством, в который вводятся целевая скорость транспортного средства и целевой угол поворота при рулении транспортного средства из ECU 50 помощи при парковке, выполняет управление вождением транспортного средства, совместно с другими ECU, такими как ECU управления двигателем и ECU усиления за счет мощности для руления.
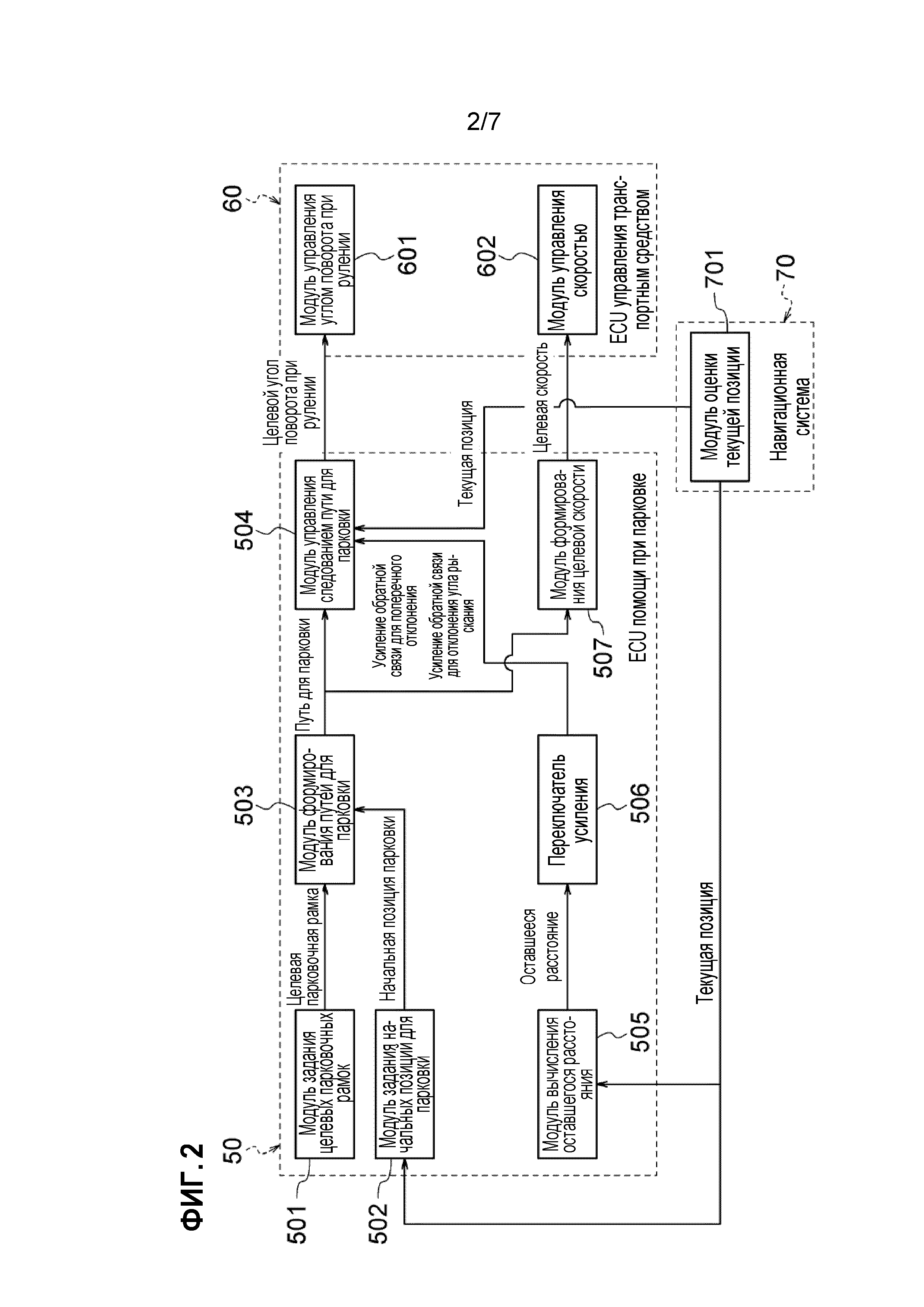
[0018] Фиг. 2 является блок-схемой для описания функций ECU 50 помощи при парковке. Как проиллюстрировано на чертеже, ECU 50 помощи при парковке содержит модуль 501 задания целевых парковочных рамок, модуль 502 задания начальных позиций для парковки, модуль 503 формирования путей для парковки, модуль 504 управления следованием пути для парковки, модуль 505 вычисления оставшегося расстояния, переключатель 506 усиления и модуль 507 формирования целевой скорости. ECU 60 управления транспортным средством включает в себя модуль 601 управления углом поворота при рулении и модуль 602 управления скоростью. Навигационная система 70 включает в себя модуль 701 оценки текущей позиции. Модуль 701 оценки текущей позиции оценивает текущую позицию рассматриваемого транспортного средства и выводит ее в модуль 502 задания начальных позиций для парковки, модуль 504 управления следованием пути для парковки и модуль 505 вычисления оставшегося расстояния. Примеры процесса оценки текущей позиции включают в себя процесс измерения текущей позиции рассматриваемого транспортного средства с использованием глобальной системы позиционирования (GPS), процесс получения текущей позиции через связь между транспортным средством и дорожной инфраструктурой и процесс вычисления текущей позиции на основе величины руления для руления и рабочей величины нажатия педали акселератора.
[0019] Модуль 501 задания целевых парковочных рамок задает парковочную рамку, в которой рассматриваемое транспортное средство паркуется путем автоматизированного вождения (эта парковочная рамка в дальнейшем называется "целевой парковочной рамкой"). Модуль 501 задания целевых парковочных рамок сначала обнаруживает парковочные рамки, существующие на автомобильной парковке, из изображений, захваченных посредством камер 11-14, и затем выбирает места, в которых возможна парковка (такие места в дальнейшем называются "доступными местами для парковки") из числа обнаруженных парковочных рамок.
[0020] В процессе обнаружения парковочных рамок, во-первых, изображение вида сверху формируется из изображений, захваченных посредством камер 11-14, и возможные варианты линий рамок, которые могут составлять парковочные рамки, обнаруживаются из изображения вида сверху. Затем выполняется определение в отношении того, удовлетворяют или нет обнаруженные возможные варианты линий рамок условиям определения относительно расстояний от других линий рамок, относительных углов относительно других линий рамок и длин, и места, заданные посредством возможных вариантов линий рамок, удовлетворяющих условиям определения, обнаруживаются в качестве парковочных рамок. Непринципиально формировать изображение вида сверху из изображений, захваченных посредством камер 11-14, и обнаруживать парковочные рамки из изображения вида сверху. Например, информация относительно парковочных рамок может получаться через связь с наружной стороной по отношению к транспортному средству, к примеру, так называемую связь между транспортным средством и дорожной инфраструктурой или связь между транспортными средствами.
[0021] В процессе обнаружения доступных мест для парковки, выполняется определение в отношении того, присутствуют или нет помехи, такие как припаркованные транспортные средства, в обнаруженных парковочных рамках или на путях при парковке в парковочных рамках, на основе информации дальности (информации точек отражения) из устройства 15 измерения дальности, и парковочные рамки без помех обнаруживаются в качестве доступных мест для парковки. Непринципиально обнаруживать доступные места для парковки на основе информации дальности из устройства 15 измерения дальности, и доступные места для парковки также могут обнаруживаться из изображений, захваченных посредством камер 11-14 или камеры, установленной на автомобильной парковке. Помимо этого или альтернативно, информация относительно доступных мест для парковки может получаться из центра управления автомобильной парковки.
[0022] После этого, модуль 501 задания целевых парковочных рамок обнаруживает одно или более мест для парковки, рекомендуемых для водителя или пассажира транспортного средства (такие места для парковки в дальнейшем называются "рекомендованными местами для парковки"), из числа доступных мест для парковки, и представляет рекомендованные места для парковки водителю или пассажиру транспортного средства. Примеры процесса обнаружения рекомендованных мест для парковки включают в себя процесс обнаружения доступных мест для парковки, имеющих кратчайшее требуемое время при парковке на доступных местах для парковки, в качестве рекомендованных мест для парковки и процесс обнаружения доступных мест для парковки, ближайших к точке взгляда водителя рассматриваемого транспортного средства, в качестве рекомендованных мест для парковки. В процессе представления рекомендованных мест для парковки, дисплей управляется с возможностью отображать изображение вида сверху множества парковочных рамок, включающих в себя рекомендованные места для парковки.
[0023] После этого, модуль 501 задания целевых парковочных рамок принимает обозначение целевой парковочной рамки, выполняемое водителем или пассажира транспортного средства, и выводит обозначенную целевую парковочную рамку в модуль 503 формирования путей для парковки. В примерном способе, обозначение целевой парковочной рамки может выполняться таким образом, что водитель или пассажир касается рекомендованного места для парковки, отображаемого на дисплее с сенсорной панелью, либо водитель или пассажир использует функциональную клавишу для того, чтобы перемещать курсор, отображаемый на дисплее, в рекомендованное место для парковки, отображаемое на дисплее, и нажимает кнопку определения.
[0024] Модуль 502 задания начальных позиций для парковки выводит позицию, в которой процесс помощи при парковке начинается (эта позиция в дальнейшем называется "начальной позицией для парковки") в модуль 503 формирования путей для парковки. Например, когда главный переключатель 40 нажимается, модуль 502 задания начальных позиций для парковки получает текущую позицию рассматриваемого транспортного средства в этот момент из модуля 701 оценки текущей позиции и задает полученную текущую позицию в качестве начальной позиции для парковки.
[0025] Модуль 503 формирования путей для парковки формирует путь из начальной позиции для парковки, заданной посредством модуля 502 задания начальных позиций для парковки, в целевую парковочную рамку, заданную посредством модуля 501 задания целевых парковочных рамок (этот путь в дальнейшем называется "путем для парковки"), и выводит сформированный целевой путь для парковки в модуль 504 управления следованием пути для парковки и модуль 507 формирования целевой скорости. В процессе формирования пути для парковки, например, вычисляются путь кривой от начальной позиции для парковки до позиции поворота (позиции, в которой выполняется поворот для парковки) и путь кривой от позиции поворота до целевой парковочной рамки. Непринципиально вычислять путь для парковки, и путь для парковки, определенный для каждой парковочной рамки, может предварительно сохраняться в запоминающем устройстве (ROM) и считываться из запоминающего устройства. Помимо этого или альтернативно, информация относительно предварительно определенного пути для парковки может получаться через связь между транспортным средством и дорожной инфраструктурой или связь между транспортными средствами.
[0026] Модуль 504 управления следованием пути для парковки вычисляет целевой угол поворота при рулении для управления рассматриваемым транспортным средством с возможностью следовать пути для парковки, выводимому из модуля 503 формирования путей для парковки, и выводит вычисленный целевой угол поворота при рулении в модуль 601 управления углом поворота при рулении. Модуль 601 управления рулением управляет углом поворота при рулении рассматриваемого транспортного средства таким образом, чтобы достигать целевого угла поворота при рулении, выводимого из модуля 504 управления следованием пути для парковки.
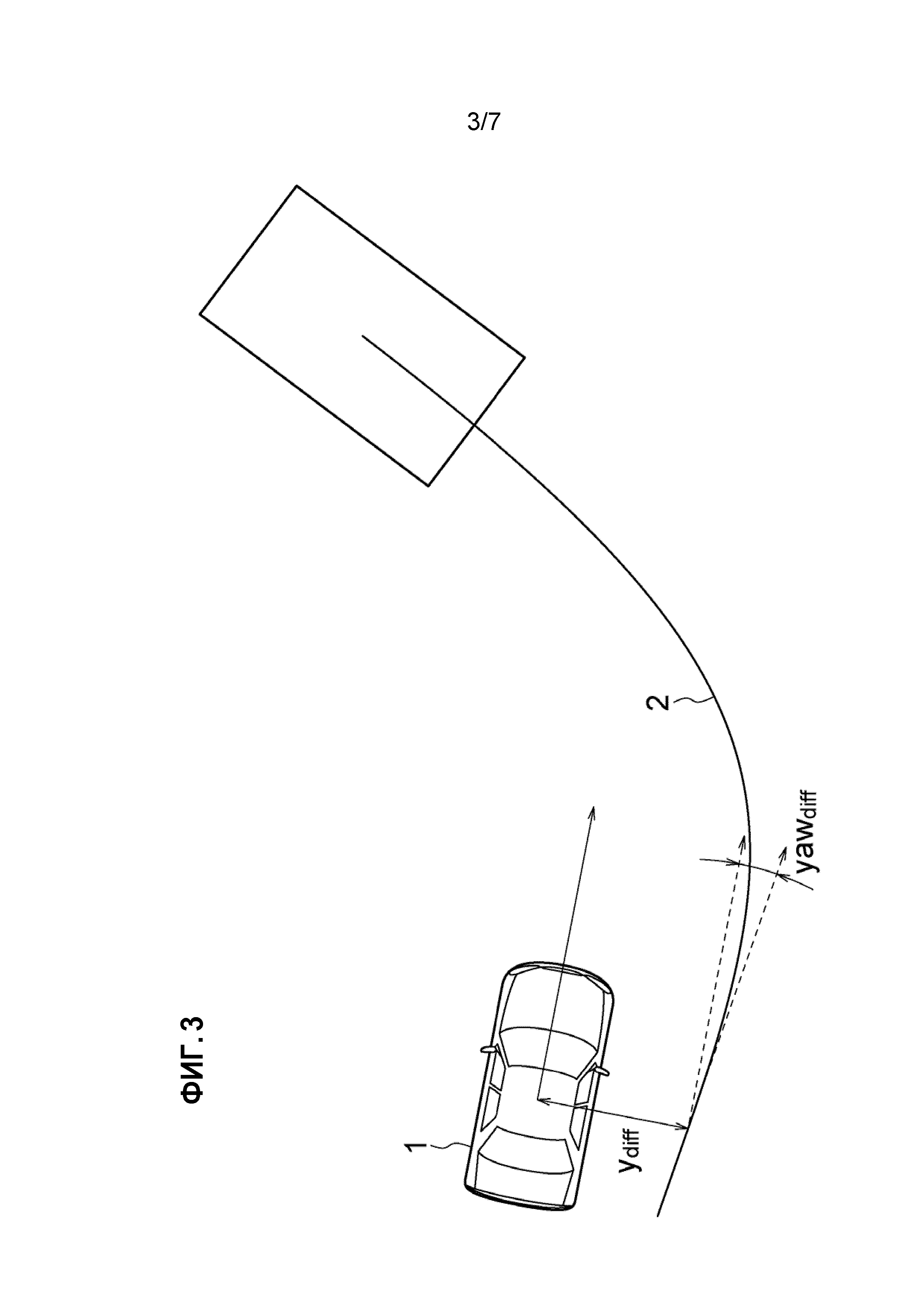
[0027] Фиг. 3 является схемой для описания управления, при котором рассматриваемое транспортное средство 1 управляется с возможностью следовать пути 2 для парковки. Как проиллюстрировано на чертеже, поперечное отклонение ydiff и отклонение yawdiff угла рыскания рассматриваемого транспортного средства 1 могут возникать относительно пути 2 для парковки, выводимого из модуля 503 формирования путей для парковки. Поперечное отклонение ydiff представляет собой расстояние между предварительно определенной позицией центра рассматриваемого транспортного средства 1 в направлении ширины транспортного средства и пути 2 для парковки. Отклонение yawdiff угла рыскания представляет собой угол осевой линии рассматриваемого транспортного средства 1 в продольном направлении относительно касательной линии участка пути 2 для парковки, имеющего кривизну, или относительно прямолинейного участка пути 2 для парковки.
[0028] Модуль 504 управления следованием пути для парковки вычисляет целевой угол K поворота при рулении с использованием следующего уравнения (1).
уравнение 1

Первый член является целевым углом поворота при рулении, который задается в соответствии с кривизной пути 2 для парковки, при этом Kstr-ρ является коэффициентом, и ρtraj(l) является кривизной пути 2 для парковки. Второй член соответствует величине управления поперечной позиции между рассматриваемым транспортным средством 1 и путем 2 для парковки, в частности, величине коррекции целевого угла поворота при рулении, которая задается в соответствии с поперечным отклонением ydiff, при этом KFB_ydiff является усилением обратной связи для поперечного отклонения ydiff. Третий член соответствует величине управления углом рыскания между рассматриваемым транспортным средством 1 и путем 2 для парковки, в частности, величине коррекции целевого угла поворота при рулении, которая задается в соответствии с отклонением yawdiff угла рыскания, при этом KFB_yawdiff является усилением обратной связи для отклонения yawdiff угла рыскания.
[0029] Таким образом, модуль 504 управления следованием пути для парковки проводит перекрестную проверку текущей позиции рассматриваемого транспортного средства 1, выводимой из модуля 701 оценки текущей позиции, с путем 2 для парковки, выводимым из модуля 503 формирования путей для парковки, чтобы обнаруживать поперечное отклонение ydiff и отклонение yawdiff угла рыскания рассматриваемого транспортного средства 1 со ссылкой на путь 2 для парковки, и выполняет управление с обратной связью таким образом, что определенное поперечное отклонение ydiff и отклонение yawdiff угла рыскания уменьшаются либо становятся соответствующими пороговыми значениями или меньше, т.е. рассматриваемое транспортное средство 1 управляется с возможностью следовать пути 2 для парковки.
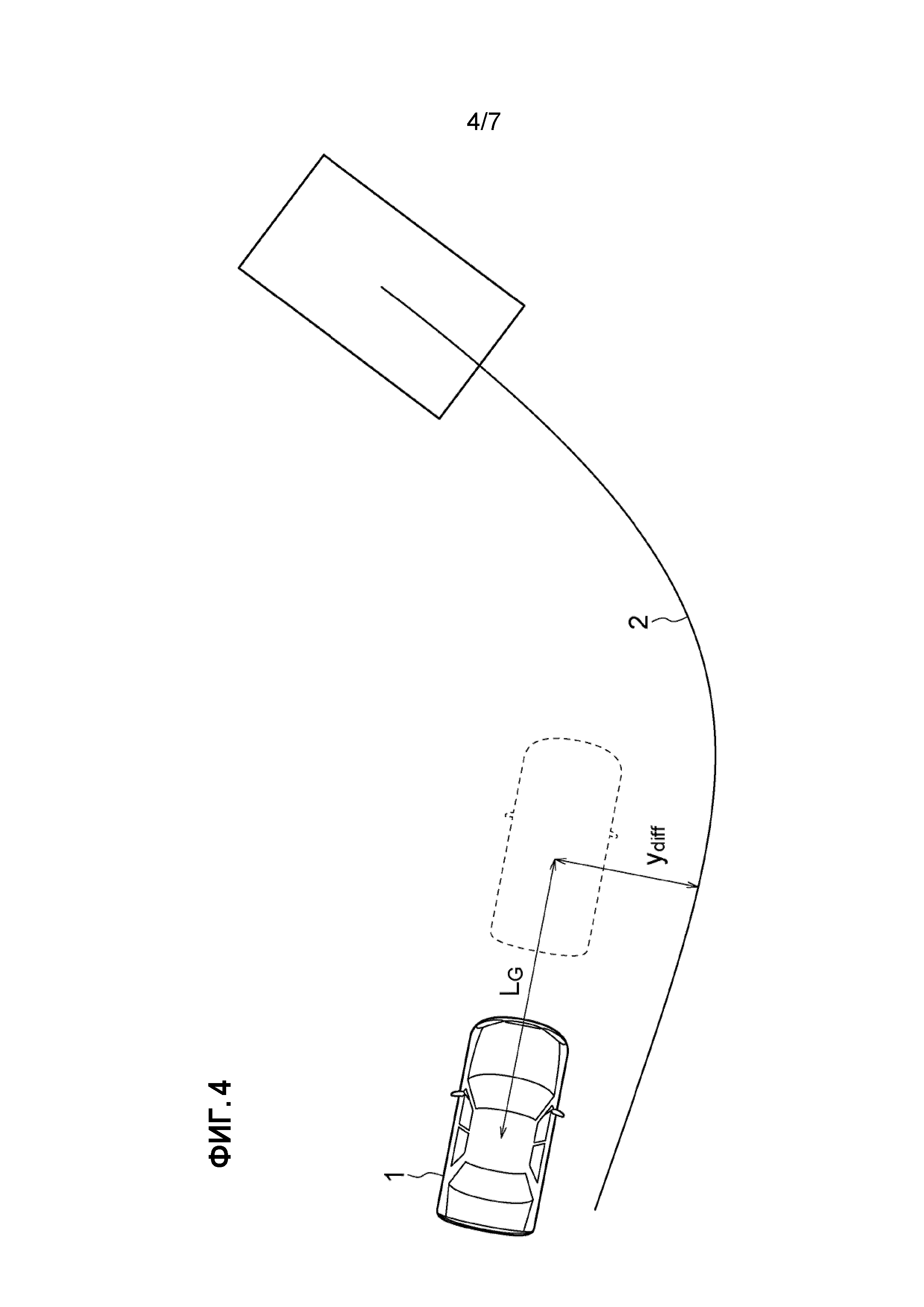
[0030] Фиг. 4 является схемой для описания модифицированного примера способа вычисления второго члена вышеуказанного уравнения (1). Как проиллюстрировано на чертеже, в этом модифицированном примере, величина коррекции целевого угла поворота при рулении второго члена вышеуказанного уравнения (1) вычисляется при условии, что поперечное отклонение ydiff представляет собой расстояние между точкой расстояния LG до точки взгляда и путем 2 для парковки. Расстояние LG до точки взгляда является расстоянием от рассматриваемого транспортного средства 1 до точки взгляда, расположенной впереди рассматриваемого транспортного средства 1.
[0031] Модуль 507 формирования целевой скорости вычисляет целевую скорость в соответствии с путем для парковки, выводимым из модуля 503 формирования путей для парковки, и выводит вычисленную целевую скорость в модуль 602 управления скоростью. Целевая скорость, например, составляет такую скорость, что ускорение или замедление выполняется в соответствии с кривизной пути для парковки.
[0032] Модуль 505 вычисления оставшегося расстояния вычисляет расстояние от текущей позиции рассматриваемого транспортного средства 1, выводимой из модуля 701 оценки текущей позиции, до целевой парковочной рамки, заданной посредством модуля 501 задания целевых парковочных рамок (это расстояние в дальнейшем называется "оставшимся расстоянием"), и выводит вычисленное оставшееся расстояние в переключатель 506 усиления. В процессе вычисления оставшегося расстояния, например, оставшееся расстояние L вычисляется с использованием следующего уравнения (2):
уравнение 2

где L0 является расстоянием от начальной позиции для парковки, заданной посредством модуля 502 задания начальных позиций для парковки, до целевой парковочной рамки, заданной посредством модуля 501 задания целевых парковочных рамок, и L1 является расстоянием перемещения из начальной позиции для парковки, выводимым из датчика 20 расстояния перемещения.
[0033] Переключатель 506 усиления переключает усиление KFB_ydiff обратной связи для поперечного отклонения ydiff и усиление KFB_yawdiff обратной связи для отклонения yawdiff угла рыскания рассматриваемого транспортного средства 1 относительно пути 2 для парковки, сформированного посредством модуля 503 формирования путей для парковки, в соответствии с оставшимся расстоянием L, выводимым из модуля 505 вычисления оставшегося расстояния. В частности, когда оставшееся расстояние L, выводимое из модуля 505 вычисления оставшегося расстояния, не меньше порогового значения, усиление KFB_ydiff1 обратной связи для поперечного отклонения ydiff и усиление KFB_yawdiff1 обратной связи для отклонения yawdiff угла рыскания задаются. С другой стороны, когда оставшееся расстояние L, выводимое из модуля 505 вычисления оставшегося расстояния, меньше порогового значения, усиление KFB_ydiff2 обратной связи для поперечного отклонения ydiff и усиление KFB_yawdiff2 обратной связи для отклонения yawdiff угла рыскания задаются.
[0034] Здесь, усиления KFB_yawdiff1 и KFB_yawdiff2 обратной связи для отклонения yawdiff угла рыскания удовлетворяют следующему уравнению (3), и усиления KFB_ydiff1 и KFB_ydiff2 обратной связи для поперечного отклонения ydiff удовлетворяют следующему уравнению (4).
уравнение 3

уравнение 4

[0035] Таким образом, когда оставшееся расстояние L не меньше порогового значения, переключатель 506 усиления задает усиление KFB_ydiff1 обратной связи для поперечного отклонения ydiff и усиление KFB_yawdiff1 обратной связи для отклонения yawdiff угла рыскания таким образом, что управление приоритетами при коррекции позиции выполняется для того, чтобы предоставлять более высокий приоритет коррекции поперечного отклонения ydiff по сравнению с коррекцией отклонения yawdiff угла рыскания. С другой стороны, когда оставшееся расстояние L, выводимое из модуля 505 вычисления оставшегося расстояния, меньше порогового значения, переключатель 506 усиления задает усиление KFB_yawdiff2 обратной связи для отклонения yawdiff угла рыскания и усиление KFB_ydiff2 обратной связи для поперечного отклонения ydiff таким образом, что управление приоритетами при коррекции угла рыскания выполняется для того, чтобы предоставлять более высокий приоритет коррекции отклонения угла рыскания по сравнению с коррекцией поперечного отклонения.
[0036] Модуль 504 управления следованием пути для парковки в силу этого вычисляет целевой угол K поворота при рулении с использованием следующего уравнения (5), когда оставшееся расстояние L не меньше порогового значения, и вычисляет целевой угол K поворота при рулении с использованием следующего уравнения (6), когда оставшееся расстояние L меньше порогового значения.
уравнение 5

уравнение 6

[0037] Верхний предел может задаваться для третьего члена каждого из вышеуказанных уравнений (5) и (6), т.е. для величины коррекции целевого угла поворота при рулении, которая задается в соответствии с отклонением угла рыскания. В этом случае, верхний предел третьего члена вышеуказанного уравнения (6), когда оставшееся расстояние L меньше порогового значения, может задаваться выше верхнего предела третьего члена вышеуказанного уравнения (5), когда оставшееся расстояние L не меньше порогового значения. Помимо этого или альтернативно, верхний предел может задаваться для второго члена каждого из вышеуказанных уравнений (5) и (6), т.е. для величины коррекции целевого угла поворота при рулении, которая задается в соответствии с поперечным отклонением. В этом случае, верхний предел второго члена вышеуказанного уравнения (5), когда оставшееся расстояние L не меньше порогового значения, может задаваться выше верхнего предела второго члена вышеуказанного уравнения (6), когда оставшееся расстояние L меньше порогового значения. В варианте осуществления, когда оставшееся расстояние L не меньше порогового значения, верхний предел второго члена вышеуказанного уравнения (5) может задаваться выше верхнего предела второго члена вышеуказанного уравнения (6), и верхний предел третьего члена вышеуказанного уравнения (5) может задаваться ниже верхнего предела третьего члена вышеуказанного уравнения (6), тогда как когда оставшееся расстояние L меньше порогового значения, верхний предел второго члена вышеуказанного уравнения (6) может задаваться ниже верхнего предела второго члена вышеуказанного уравнения (5), и верхний предел третьего члена вышеуказанного уравнения (6) может задаваться выше верхнего предела третьего члена вышеуказанного уравнения (5). В другом варианте осуществления, усиления обратной связи могут задаваться постоянными независимо от оставшегося расстояния L, и верхний предел, по меньшей мере, одного из второго члена и третьего члена в каждом из вышеуказанных уравнений (5) и (6) может варьироваться.
[0038] Пороговое значение оставшегося расстояния L задается равным меньшему расстоянию, чем расстояние L1 перемещения из начальной позиции для парковки, к примеру, от одного до нескольких метров, например, таким образом, что расстояние L1 перемещения до тех пор, пока переключение усилений обратной связи не будет выполнено, превышает оставшееся расстояние L в то время, когда переключение усилений обратной связи выполняется. В альтернативном варианте осуществления, пороговое значение оставшегося расстояния L может задаваться равным большему расстоянию, чем расстояние L1 перемещения из начальной позиции для парковки.
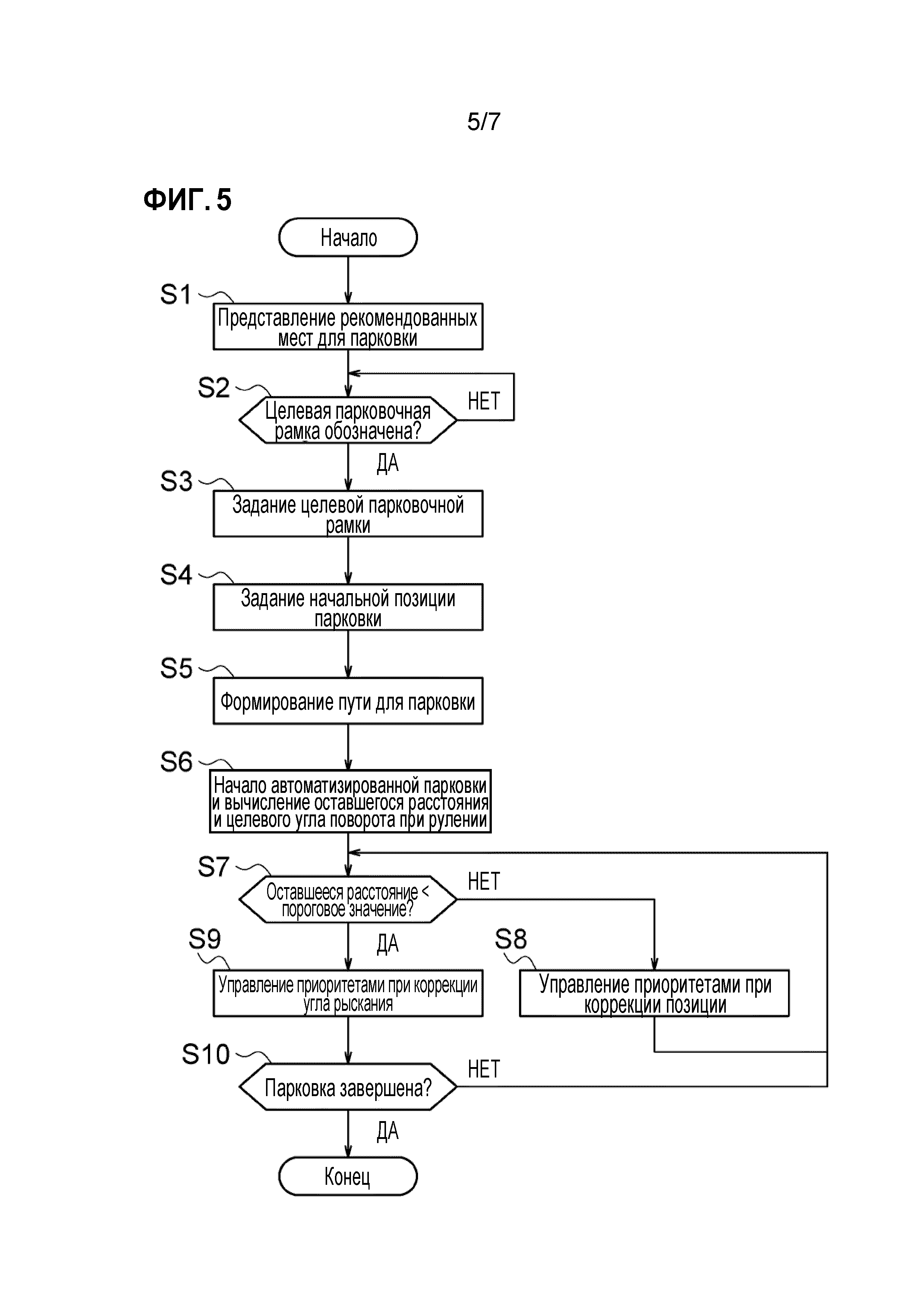
[0039] Фиг. 5 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления помощью при парковке, выполняемую посредством оборудования 100 помощи при парковке. Управление помощью при парковке, представленное посредством блок-схемы последовательности операций способа, начинается, когда главный переключатель 40 нажимается, и начало помощи при парковке инструктируется, и процедура переходит к этапу S1.
[0040] На этапе S1, модуль 501 задания целевых парковочных рамок обнаруживает доступные места для парковки, обнаруживает одно или более рекомендованных мест для парковки из числа доступных мест для парковки и управляет дисплеем с возможностью отображать обнаруженные рекомендованные места для парковки. Затем на этапе S2, модуль 501 задания целевых парковочных рамок определяет то, принимается либо нет обозначение целевой парковочной рамки, выполненное водителем или пассажиром транспортного средства. При положительном определении выполняется этап S3, на котором модуль 501 задания целевых парковочных рамок выводит обозначенную целевую парковочную рамку в модуль 503 формирования путей для парковки.
[0041] Затем на этапе S4, модуль 502 задания начальных позиций для парковки выводит текущую позицию, выводимую из модуля 701 оценки текущей позиции, в модуль 503 формирования путей для парковки в качестве начальной позиции для парковки. Затем на этапе S5, модуль 503 формирования путей для парковки формирует путь 2 для парковки от начальной позиции для парковки до целевой парковочной рамки и выводит сформированный путь 2 для парковки в модуль 504 управления следованием пути для парковки и модуль 507 формирования целевой скорости.
[0042] Затем на этапе S6, автоматизированная парковка начинается, вычисление оставшегося расстояния L до целевой парковочной рамки посредством модуля 505 вычисления оставшегося расстояния начинается, и вычисление целевого угла K поворота при рулении посредством модуля 504 управления следованием пути для парковки начинается. На этом этапе, модуль 504 управления следованием пути для парковки вычисляет целевой угол K поворота при рулении и выводит его в модуль 601 управления углом поворота при рулении. Модуль 601 управления углом поворота при рулении управляет углом поворота при рулении рассматриваемого транспортного средства 1 таким образом, что целевой угол K поворота при рулении достигается. Помимо этого, модуль 507 формирования целевой скорости выводит целевую скорость в модуль 602 управления скоростью. Модуль 602 управления скоростью управляет скоростью рассматриваемого транспортного средства 1 таким образом, что целевая скорость достигается. С другой стороны, модуль 505 вычисления оставшегося расстояния вычисляет оставшееся расстояние L с использованием вышеуказанного уравнения (2) и выводит вычисленное оставшееся расстояние L в переключатель 506 усиления.
[0043] Затем на этапе S7, переключатель 506 усиления определяет то, меньше или нет оставшееся расстояние L, выводимое из модуля 505 вычисления, оставшегося расстояния порогового значения. При положительном определении выполняется этап S9, тогда как при отрицательном определении выполняется этап S8. На этапе S8, переключатель 506 усиления задает усиление обратной связи для поперечного отклонения ydiff равным KFB_ydiff1 и задает усиление обратной связи для отклонения yawdiff угла рыскания равным KFB_yawdiff1. Таким образом, на этом этапе, управление приоритетами при коррекции позиции выполняется. Процедура возвращается от этапа S8 к этапу S7.
[0044] С другой стороны, на этапе S9, переключатель 506 усиления задает усиление обратной связи для поперечного отклонения ydiff равным KFB_ydiff2 и задает усиление обратной связи для отклонения yawdiff угла рыскания равным KFB_yawdiff2. Таким образом, на этом этапе, управление приоритетами при коррекции угла рыскания выполняется.
[0045] Затем на этапе S10, модуль 504 управления следованием пути для парковки определяет то, совпадает или нет текущая позиция рассматриваемого транспортного средства, выводимая из модуля 701 оценки текущей позиции, с целевой позицией для парковки в целевой парковочной рамке, т.е. то, завершается или нет парковка. Когда отрицательное определение выполняется, процедура возвращается к этапу S7. Когда положительное определение выполняется, процесс завершается.
[0046] В общем, при условии, что водитель паркует рассматриваемое транспортное средство посредством вождения вручную, когда расстояние до целевой позиции для парковки является большим, водитель предоставляет более высокий приоритет регулированию позиции рассматриваемого транспортного средства относительно целевой позиции для парковки по сравнению с регулированием угла рассматриваемого транспортного средства относительно целевой позиции для парковки. После этого, по мере того, как рассматриваемое транспортное средство приближается к целевой позиции для парковки, водитель должен интересоваться углом рассматриваемого транспортного средства относительно целевой позиции для парковки и предоставлять более высокий приоритет регулированию угла рассматриваемого транспортного средства относительно целевой позиции для парковки по сравнению с регулированием позиции рассматриваемого транспортного средства относительно целевой позиции для парковки. Таким образом, в случае если отклонение рассматриваемого транспортного средства по отношению к целевой парковочной рамке является большим, когда рассматриваемое транспортное средство приближается вплотную к целевой позиции для парковки, водитель или пассажир рассматриваемого транспортного средства обычно может испытывать некомфортное ощущение. Аналогично, также в случае, если рассматриваемое транспортное средство паркуется в целевой позиции для парковки путем автоматизированного вождения, водитель или пассажир рассматриваемого транспортного средства должен интересоваться углом рассматриваемого транспортного средства относительно целевой позиции для парковки по мере того, как рассматриваемое транспортное средство приближается к целевой позиции для парковки.
[0047] В способе помощи при парковке и оборудовании 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения, в силу этого величина управления углом рыскания транспортного средства относительно целевого пути для парковки увеличивается в соответствии с уменьшением оставшегося расстояния до целевой позиции для парковки транспортного средства. Это позволяет уменьшать отклонение рассматриваемого транспортного средства 1 по отношению к целевой парковочной рамке, когда рассматриваемое транспортное средство 1 приближается вплотную к целевой парковочной рамке, чтобы за счет этого облегчать некомфортное ощущение, возникающее у водителя или пассажира рассматриваемого транспортного средства 1, когда рассматриваемое транспортное средство 1 приближается вплотную к целевой парковочной рамке.
[0048] В способе помощи при парковке и оборудовании 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения, чтобы увеличивать величину управления углом рыскания транспортного средства относительно целевого пути для парковки в соответствии с уменьшением оставшегося расстояния до целевой позиции для парковки транспортного средства, темп изменения величины коррекции для отклонения yawdiff угла рыскания транспортного средства относительно целевого пути для парковки увеличивается в соответствии с уменьшением оставшегося расстояния до целевой позиции для парковки транспортного средства. Это увеличивает величину изменения в единицу времени угла рыскания, и в силу этого можно быстро уменьшать отклонение рассматриваемого транспортного средства 1 по отношению к целевой парковочной рамке, когда рассматриваемое транспортное средство 1 приближается вплотную к целевой парковочной рамке.
[0049] В способе помощи при парковке и оборудовании 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения, чтобы увеличивать величину управления углом рыскания транспортного средства относительно целевого пути для парковки в соответствии с уменьшением оставшегося расстояния до целевой позиции для парковки транспортного средства, верхний предел величины коррекции для отклонения yawdiff угла рыскания транспортного средства относительно целевого пути для парковки увеличивается в соответствии с уменьшением оставшегося расстояния до целевой позиции для парковки транспортного средства. Это обеспечивает возможность широкой коррекции угла рыскания, и в силу этого можно дополнительно уменьшать отклонение рассматриваемого транспортного средства 1 по отношению к целевой парковочной рамке, когда рассматриваемое транспортное средство 1 приближается вплотную к целевой парковочной рамке. Чтобы увеличивать верхний предел величины коррекции, верхний предел целевого значения угла рыскания может увеличиваться, или нижний предел целевого значения угла рыскания может уменьшаться.
[0050] В способе помощи при парковке и оборудовании 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения, темп изменения величины коррекции для отклонения yawdiff угла рыскания рассматриваемого транспортного средства 1 относительно пути 2 для парковки в качестве цели увеличивается в соответствии с уменьшением оставшегося расстояния L до целевой парковочной рамки рассматриваемого транспортного средства 1. Например, как описано в вышеприведенных вариантах осуществления, в течение периода, в который оставшееся расстояние L не меньше порогового значения после того, как помощь при парковке начинается, коррекция отклонения yawdiff угла рыскания выполняется с использованием предварительно определенного темпа изменения, тогда как после того, как оставшееся расстояние L становится ниже порогового значения, коррекция отклонения yawdiff угла рыскания выполняется с использованием более высокого темпа изменения, чем вышеуказанный предварительно определенный темп изменения. Это позволяет уменьшать отклонение рассматриваемого транспортного средства 1 по отношению к целевой парковочной рамке, когда рассматриваемое транспортное средство 1 приближается вплотную к целевой парковочной рамке, чтобы за счет этого облегчать некомфортное ощущение, возникающее у водителя или пассажира рассматриваемого транспортного средства 1, когда рассматриваемое транспортное средство 1 приближается вплотную к целевой парковочной рамке. Также, когда пороговое значение оставшегося расстояния L уменьшается, чтобы увеличивать темп изменения величины коррекции для отклонения yawdiff угла рыскания, отклонение рассматриваемого транспортного средства 1 по отношению к целевой парковочной рамке может уменьшаться.
[0051] В способе помощи при парковке и оборудовании 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения, величина управления углом рыскания до величины управления поперечной позиции транспортного средства относительно целевого пути для парковки увеличивается в соответствии с уменьшением оставшегося расстояния. Другими словами, более высокий приоритет предоставляется коррекции увеличения отклонения угла рыскания по сравнению с коррекцией увеличения поперечного отклонения транспортного средства относительно целевого пути для парковки в соответствии с уменьшением оставшегося расстояния. Это позволяет эффективнее уменьшать отклонение рассматриваемого транспортного средства 1 по отношению к целевой парковочной рамке, когда рассматриваемое транспортное средство 1 приближается вплотную к целевой парковочной рамке, чтобы за счет этого эффективнее облегчать некомфортное ощущение, возникающее у водителя или пассажира рассматриваемого транспортного средства 1, когда рассматриваемое транспортное средство 1 приближается вплотную к целевой парковочной рамке.
[0052] Здесь, когда коррекция поперечного отклонения рассматриваемого транспортного средства 1 приоритезирована, коррекция отклонения угла рыскания рассматриваемого транспортного средства 1 задерживается. В способе помощи при парковке и оборудовании 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения, в силу этого уровень приоритета коррекции отклонения yawdiff угла рыскания повышается по сравнению с коррекцией поперечного отклонения ydiff рассматриваемого транспортного средства 1. Это позволяет эффективнее уменьшать отклонение рассматриваемого транспортного средства 1 по отношению к целевой парковочной рамке, когда рассматриваемое транспортное средство 1 приближается вплотную к целевой парковочной рамке, чтобы за счет этого эффективнее облегчать некомфортное ощущение, возникающее у водителя или пассажира рассматриваемого транспортного средства 1, когда рассматриваемое транспортное средство 1 приближается вплотную к целевой парковочной рамке. Кроме того, в течение периода, в который оставшееся расстояние L не меньше порогового значения после того, как помощь при парковке начинается, поперечное отклонение ydiff предпочтительно управляется по отношению к отклонению yawdiff угла рыскания; в силу этого поперечное отклонение ydiff, когда оставшееся расстояние L становится меньше порогового значения, меньше этого поперечного отклонения ydiff, когда поперечное отклонение ydiff не управляется предпочтительно.
[0053] В способе помощи при парковке и оборудовании 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения, усиление KFB_yawdiff обратной связи для отклонения yawdiff угла рыскания относительно увеличивается по сравнению с усилением KFB_ydiff обратной связи для поперечного отклонения ydiff в соответствии с уменьшением оставшегося расстояния L, и уровень приоритета коррекции отклонения yawdiff угла рыскания в силу этого может увеличиваться по сравнению с коррекцией поперечного отклонения ydiff рассматриваемого транспортного средства 1 в соответствии с уменьшением оставшегося расстояния L.
[0054] В способе помощи при парковке и оборудовании 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения, когда оставшееся расстояние L меньше порогового значения, темп изменения величины коррекции отклонения yawdiff угла рыскания увеличивается. Через эту операцию, например, до достижения позиции в несколько метров до целевой парковочной рамки, коррекция поперечного отклонения ydiff и коррекция отклонения yawdiff угла рыскания могут выполняться симметрично, или коррекция поперечного отклонения ydiff предпочтительно может выполняться по коррекции отклонения yawdiff угла рыскания, и при достижении позиции в несколько метров до целевой парковочной рамки, коррекция отклонения yawdiff угла рыскания может быстро выполняться.
[0055] Пороговое значение оставшегося расстояния L задается равным расстоянию, к примеру, от одного до нескольких метров, которое меньше расстояния L1 перемещения из начальной позиции для парковки, и расстояние L1 перемещения до тех пор, пока переключение усиления обратной связи не будет выполнено, превышает оставшееся расстояние L в то время, когда переключение усиления обратной связи выполняется. Другими словами, пороговое значение оставшегося расстояния L задается таким образом, что расстояние от начальной позиции для парковки до позиции, в которой темп изменения величины коррекции отклонения угла рыскания увеличивается, превышает расстояние от позиции, в которой темп изменения величины коррекции отклонения угла рыскания увеличивается, до целевой позиции для парковки. Таким образом, в течение периода, в который оставшееся расстояние L не меньше порогового значения после того, как помощь при парковке начинается, поперечное отклонение ydiff предпочтительно управляется по отношению к отклонению yawdiff угла рыскания; в силу этого поперечное отклонение ydiff, когда оставшееся расстояние L становится меньше порогового значения, меньше этого поперечного отклонения ydiff, когда поперечное отклонение ydiff не управляется предпочтительно. Пороговое значение оставшегося расстояния L может задаваться равным расстоянию, меньшему расстояния L1 перемещения из начальной позиции для парковки, чтобы за счет этого подавлять значительное отклонение поперечного отклонения ydiff после того, как оставшееся расстояние L становится меньше порогового значения. После этого, когда оставшееся расстояние L становится меньше порогового значения, уровень приоритета коррекции отклонения yawdiff угла рыскания увеличивается по сравнению с коррекцией поперечного отклонения ydiff рассматриваемого транспортного средства 1, и отклонение yawdiff угла рыскания может в силу этого уменьшаться. Другими словами, можно уменьшать отклонение yawdiff угла рыскания при подавлении большого отклонения поперечного отклонения ydiff.
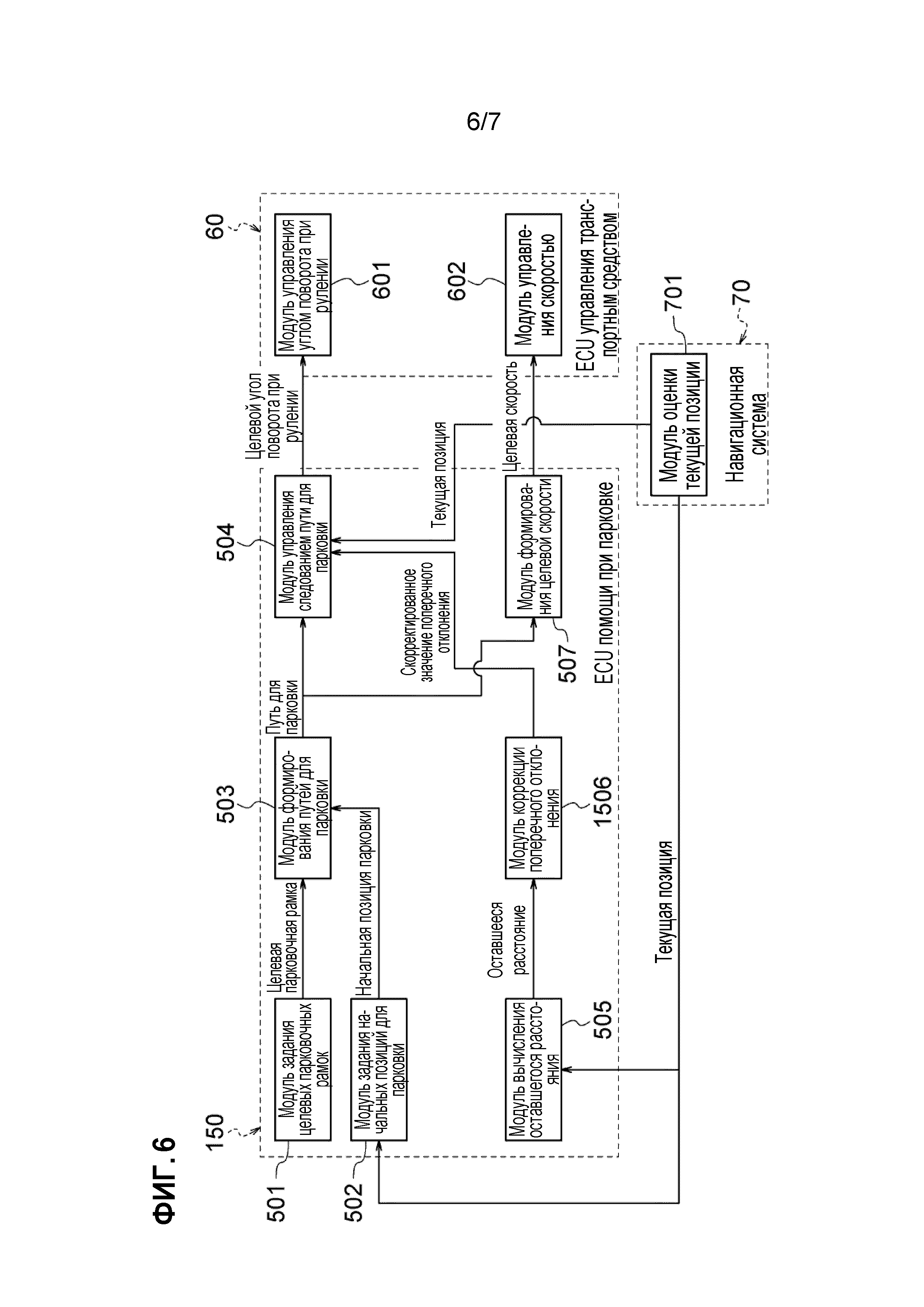
[0056] Фиг. 6 является блок-схемой для описания функций ECU 150 помощи при парковке согласно другому варианту осуществления настоящего изобретения. Как проиллюстрировано на чертеже, ECU 150 помощи при парковке содержит модуль 501 задания целевых парковочных рамок, модуль 502 задания начальных позиций для парковки, модуль 503 формирования путей для парковки, модуль 504 управления следованием пути для парковки, модуль 505 вычисления оставшегося расстояния, модуль 1506 коррекции поперечного отклонения и модуль 507 формирования целевой скорости. Элементы, идентичные элементам в вышеописанных вариантах осуществления, обозначаются с помощью идентичных ссылок с номерами, и вышеприведенное описание заимствуется в данном документе с опусканием дублированных описаний.
[0057] Модуль 1506 коррекции поперечного отклонения корректирует поперечное отклонение ydiff рассматриваемого транспортного средства 1 относительно пути 2 для парковки, который формируется посредством модуля 503 формирования путей для парковки, с использованием следующего уравнения (7) в соответствии с оставшимся расстоянием L, выводимым из модуля 505 вычисления оставшегося расстояния.
уравнение 7

Здесь, ydiff_hosei является скорректированным поперечным отклонением, и khosei является коэффициентом коррекции. Коэффициент коррекции является значением, которое уменьшается по мере того, как оставшееся расстояние L уменьшается.
[0058] Таким образом, модуль 1506 коррекции поперечного отклонения вычисляет скорректированное значение ydiff_hosei поперечного отклонения, которое уменьшается по мере того, как оставшееся расстояние L уменьшается, и выводит скорректированное значение ydiff_hosei поперечного отклонения в модуль 504 управления следованием пути для парковки. Модуль 504 управления следованием пути для парковки в силу этого вычисляет целевой угол K поворота при рулении с использованием следующего уравнения (8).
уравнение 8

[0059] Таким образом, по мере того, как оставшееся расстояние L уменьшается, уровень приоритета коррекции поперечного отклонения уменьшается, тогда как уровень приоритета коррекции для коррекции отклонения угла рыскания увеличивается по сравнению с уровнем приоритета коррекции поперечного отклонения и коррекции отклонения угла рыскания при начале автоматизированной парковки.
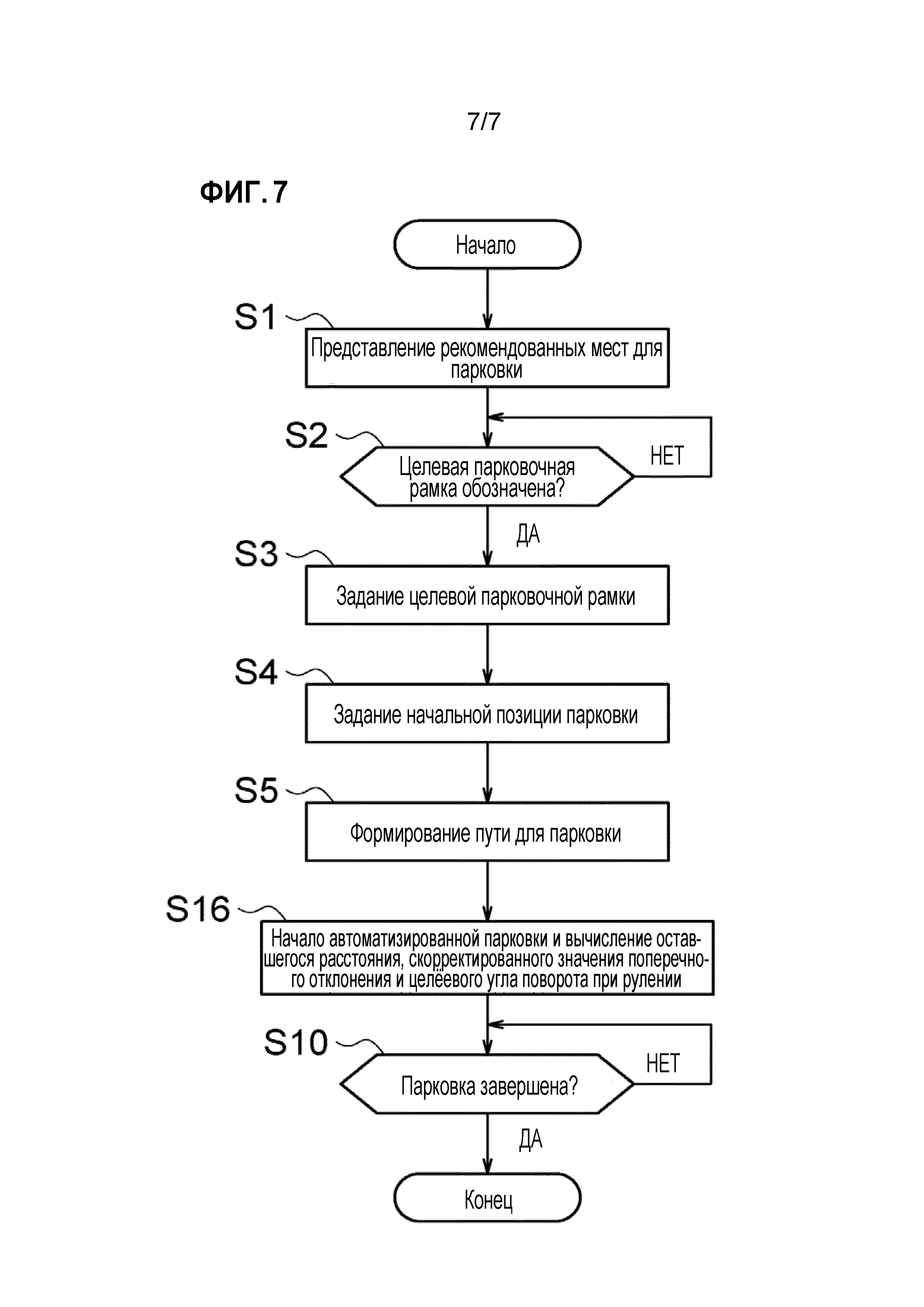
[0060] Фиг. 7 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления помощью при парковке согласно настоящему варианту осуществления. Управление, представленное посредством блок-схемы последовательности операций способа, начинается, когда главный переключатель 40 нажимается, и начало помощи при парковке инструктируется. Во-первых, выполняются этапы S1-S5 блок-схемы последовательности операций способа, проиллюстрированной на фиг. 5.
[0061] Затем на этапе S16, начинается автоматизированная парковка, начинается вычисление оставшегося расстояния L до целевой парковочной рамки посредством модуля 505 вычисления оставшегося расстояния, и начинаются вычисление скорректированного значения ydiff_hosei поперечного отклонения посредством модуля 1506 коррекции поперечного отклонения и вычисление целевого угла K поворота при рулении посредством модуля 504 управления следованием пути для парковки. На этом этапе, модуль 505 вычисления оставшегося расстояния вычисляет оставшееся расстояние L с использованием вышеуказанного уравнения (2) и выводит его в модуль 1506 коррекции поперечного отклонения. Модуль 1506 коррекции поперечного отклонения вычисляет скорректированное значение ydiff_hosei поперечного отклонения с использованием вышеуказанного уравнения (7) в соответствии с оставшимся расстоянием L, выводимым из модуля 505 вычисления оставшегося расстояния. Модуль 504 управления следованием пути для парковки вычисляет целевой угол K поворота при рулении с использованием вышеуказанного уравнения (8).
[0062] Затем на этапе S10, модуль 504 управления следованием пути для парковки определяет то, совпадает или нет текущая позиция рассматриваемого транспортного средства, выводимая из модуля 701 оценки текущей позиции, с целевой позицией для парковки в целевой парковочной рамке, т.е. то, завершается или нет парковка. Когда отрицательное определение выполняется, процедура возвращается к этапу S16. Когда положительное определение выполняется, процесс завершается.
[0063] Как описано выше, в способе помощи при парковке и оборудовании помощи при парковке согласно настоящему варианту осуществления, целевой угол K поворота при рулении вычисляется с использованием скорректированного значения ydiff_hosei поперечного отклонения, полученного посредством умножения значения обнаружения ydiff поперечного отклонения на коэффициент khosei коррекции, который уменьшается в соответствии с уменьшением оставшегося расстояния L до целевой позиции для парковки. Через эту операцию, уровень приоритета коррекции отклонения yawdiff угла рыскания может повышаться по сравнению с коррекцией поперечного отклонения ydiff рассматриваемого транспортного средства 1 в соответствии с уменьшением оставшегося расстояния L. Это позволяет эффективно уменьшать отклонение продольного направления рассматриваемого транспортного средства 1 относительно продольного направления целевой парковочной рамки, когда рассматриваемое транспортное средство 1 приближается вплотную к целевой парковочной рамке, и за счет этого можно облегчать некомфортное ощущение, возникающее у водителя или пассажира рассматриваемого транспортного средства 1, когда рассматриваемое транспортное средство 1 приближается вплотную к целевой парковочной рамке.
[0064] Варианты осуществления, поясненные выше, описываются для того, чтобы упрощать понимание настоящего изобретения, а не для того, чтобы ограничивать настоящее изобретение. Следовательно, подразумевается, что элементы, раскрытые в вышеописанных вариантах осуществления, включают в себя все конструктивные модификации и эквиваленты, которые попадают в пределы объема настоящего изобретения.
[0065] Например, в вышеописанных вариантах осуществления, усиление KFB_yawdiff обратной связи для отклонения yawdiff угла рыскания и усиление KFB_ydiff обратной связи для поперечного отклонения ydiff переключаются между тем, когда оставшееся расстояние L не меньше порогового значения, и тем, когда оставшееся расстояние L меньше порогового значения, но усиление KFB_yawdiff обратной связи для отклонения yawdiff угла рыскания может последовательно увеличиваться в соответствии с уменьшением оставшегося расстояния L, либо усиление KFB_ydiff обратной связи для поперечного отклонения ydiff может последовательно уменьшаться в соответствии с уменьшением оставшегося расстояния L. Помимо этого или альтернативно, когда оставшееся расстояние L меньше порогового значения, усиление KFB_yawdiff обратной связи для отклонения yawdiff угла рыскания может увеличиваться, тогда как усиление KFB_ydiff обратной связи для поперечного отклонения ydiff не может варьироваться.
Описание номеров ссылок
[0066] 1 - рассматриваемое транспортное средство
2 - путь для парковки
50 - ECU помощи при парковке
100 - оборудование помощи при парковке.
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Способ и устройство помощи при парковке
Способ и устройство обнаружения мест для парковки
Способ оценки собственного положения и устройство оценки собственного положения
Способ помощи при парковке и устройство помощи при парковке
Способ управления парковкой и оборудование управления парковкой
Способ определения помех, способ помощи при парковке, способ помощи при отъезде и устройство определения помех
Устройство помощи при парковке и способ помощи при парковке
Способ и устройство помощи при выезде
Способ дистанционного управления транспортным средством и устройство дистанционного управления транспортным средством
Способ и устройство дистанционного управления транспортным средством

