Результат интеллектуальной деятельности: ТЕНЗОПЛАТФОРМА ДЛЯ РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[01] Изобретение относится к силоизмерительной технике и может быть использовано в медицинской технике, в частности, для измерения усилий, прилагаемых к элементам управления контроллера роботохирургического комплекса.
Предпосылки создания изобретения
[02] Современные роботы повышают производственную эффективность, прежде всего автоматизируя выполнение технологических процессов. Однако, роботы имеют и иные преимущества, создающие основу инновационных технологий и изделий.
[03] Простые системы пользовательского интерфейса могут обеспечивать отдельное управление для каждого подвижного соединения робота, роботизированного манипулятора или другого ведомого устройства. Более сложные системы могут включать ручные контроллеры (иногда в форме джойстика или пистолетной рукоятки), которые воспринимают движение рукой пользователя и превращают его в цифровой сигнал. Система управления роботом реагирует на эти управляющие сигналы, активируя определенные сервомоторы, соленоиды или другие устройства в роботизированном манипуляторе для обеспечения желаемого действия. Ручной контроллер является базовым элементом и обеспечивает работу хирургического робота. Контроллер удерживается и перемещается рукой оператора, поэтому вес подвижных частей контроллера и инерционные нагрузки во время работы действуют на руку оператора, создавая значительную дополнительную нагрузку.
[04] Таким образом, существует потребность в создании контроллера для управления роботом, который бы обеспечивал минимальную нагрузку веса на руку оператора во время работы и имел возможность в обратном порядке преобразовывать цифровой управляющий сигнал в механическое перемещение-поворот элементов контроллера, передавая его на руки и пальцы оператора. Для этого, в том числе, необходимо определять усилия и/или крутящие моменты, возникающие при работе контроллера.
[05] В уровне техники известно сенсорное устройство для измерения усилий и/или моментов, передаваемых посредством жесткого передаточного элемента, используемое в медицинской технике, содержащие тензодатчики, расположенные внутри трехмерной конструкции, принятое в качестве наиболее близкого аналога (патент РФ №2391944 С1, МПК A61F 2/76, опубликованный 20.06.2010). Основным недостатком данной платформы является то, что она не обеспечивает достаточной точности определения усилий, прилагаемых к элементам управления.
Суть изобретения
[06] Задачей настоящего изобретения является создание тензоплатформы, позволяющей с высокой точностью получать информацию о прилагаемой рукой оператора к контроллеру силе и информацию о моменте этой силы; преобразовывать эту информацию в цифровой сигнал; передавать его в блок управления роботохирургического комплекса; перерабатывать этот сигнал, и полученные на основе указанного сигнала управленческие команды возвращать на контроллер, а именно, на его исполнительные устройства и на блок управления с целью реализации механизма минимизации нагрузки веса контроллера на руку.
[07] Технический результат, достигаемый при решении поставленной задачи, заключается в повышении точности измерения силы, прикладываемой рукой хирурга во время управления контроллером, на всей амплитуде перемещения и при всех углах, а также повышение точности измерения скорости и ускорения приложения силы.
[08] Для достижения указанного технического результата была создана тензоплатформа для роботохирургического комплекса. Основу тензоплатформы составляет тензоблок, измеряющий перемещение/деформацию под воздействием силы. Соединенные между собой элементами крепления три пары тензоблоков, каждый из которых снабжен двумя парами тензодатчиков, образуют трехмерную конструкцию - тензоплатформу. На тензоплатформе закреплена силовая площадка, воспринимающая и передающая на тензоплатформу силовое воздействие от руки оператора. При этом тензоблоки в парах расположены параллельно друг другу и соединены элементами крепления таким образом, что измеряемая сила, воспринимаемая силовой площадкой, приложена к каждому тензоблоку пары с противоположно направленным вектором, но исключительно вдоль одной оси. При этом две пары тензоблоков расположены в параллельных плоскостях так, что тензоблоки из первой пары параллельны тензоблокам из второй пары. Третья пара тензоблоков расположена либо в плоскости расположения одной из пар тензоблоков, либо в плоскости, параллельной вышеуказанным плоскостям и расположенной между ними, при этом третья пара повернута на 90° относительно двух других пар тензоблоков. При этом каждый тензоблок содержит отверстие в центре, выполненное с возможностью обеспечения минимизации влияния изгибающего момента на показания тензодатчиков. Силовая площадка расположена и закреплена в центре тензоплатформы равноудаленно от всех тензодатчиков с возможностью передачи усилия на каждый тензодатчик и жестко соединена со всей трехмерной конструкцией таким образом, чтобы передавать воздействия от руки оператора без искажений, при этом по меньшей мере одна из пар тензоблоков выполнена с возможностью жесткого соединения с элементом контроллера оператора для управления роботохирургическим комплексом. Тензоплатформа включает блок приема, обработки и передачи информации от тензодатчиков.
[09] В некоторых вариантах осуществления изобретения тензоблоки, образующие тензоплатформу, могут иметь различные диапазоны чувствительности.
[010] В некоторых вариантах осуществления изобретения каждая из пар тензоблоков обладает своим диапазоном чувствительности.
[011] При этом каждый тензоблок выполнен таким образом, чтобы повысить точность измерения, минимизировав влияние изгибающего момента, за счет наличия отверстия(-ий) в тензоблоке.
[012] Тензоблоки образуют пары, в которых они расположены параллельно друг другу, равноудалены от центра тензоплатформы и соединены элементами крепления. Общее количество пар тензоблоков выбрано из условия достоверного определения перемещения вдоль трех координатных осей.
[013] Все элементы платформы могут быть выполнены из металла. На каждом тензоблоке может быть расположено две пары тензодатчиков, при этом тензодатчики могут быть расположены на параллельных плоскостях каждого тензоблока.
Краткое описание чертежей
[014] Прилагаемые чертежи, которые включены в состав настоящего описания и являются его частью, иллюстрируют варианты осуществления изобретения и совместно с вышеприведенным общим описанием изобретения и нижеприведенным подробным описанием вариантов осуществления служат для пояснения принципов настоящего изобретения.
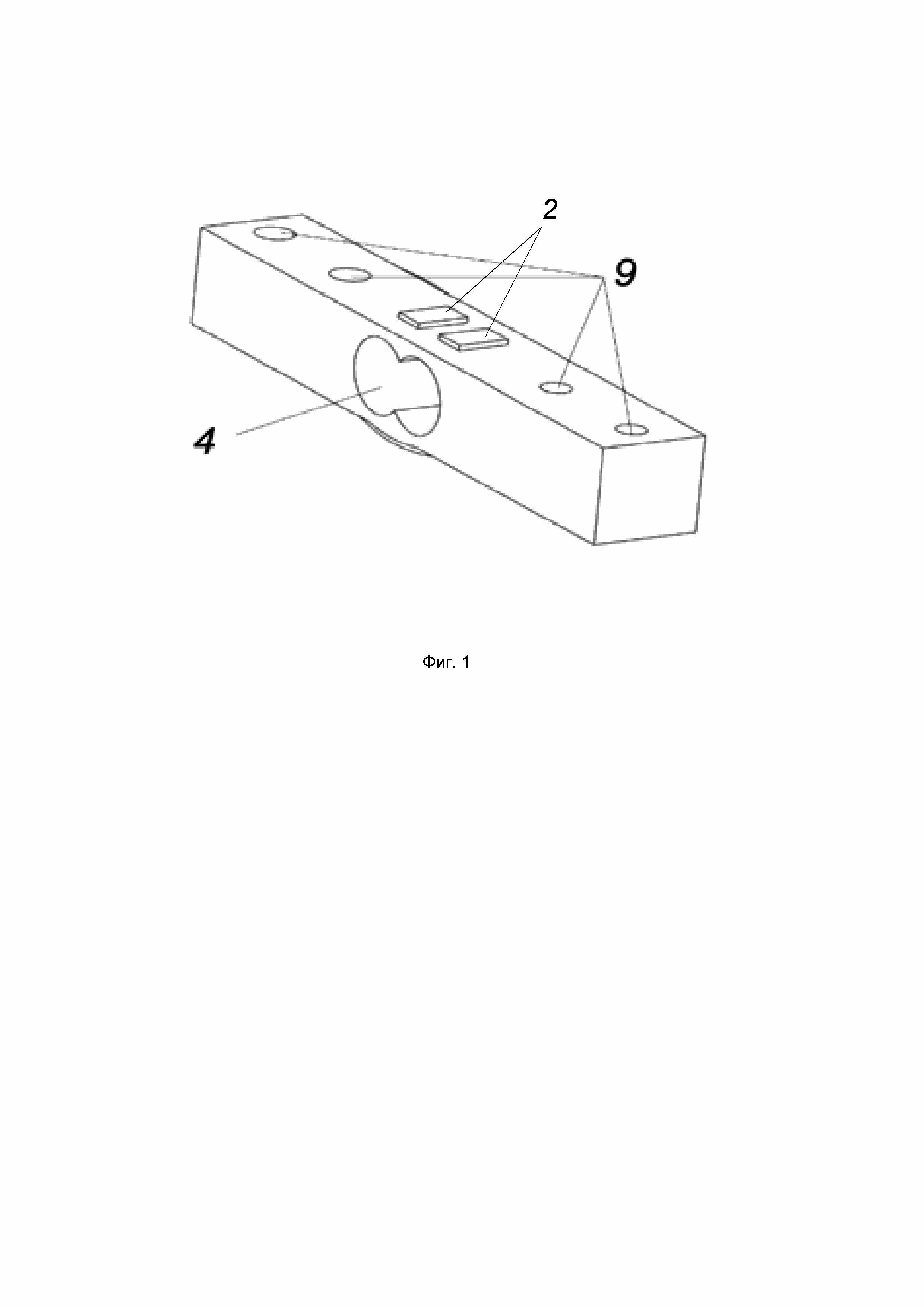
[015] На фиг. 1 изображен вариант выполнения блока измерения перемещения/деформации (тензоблока).
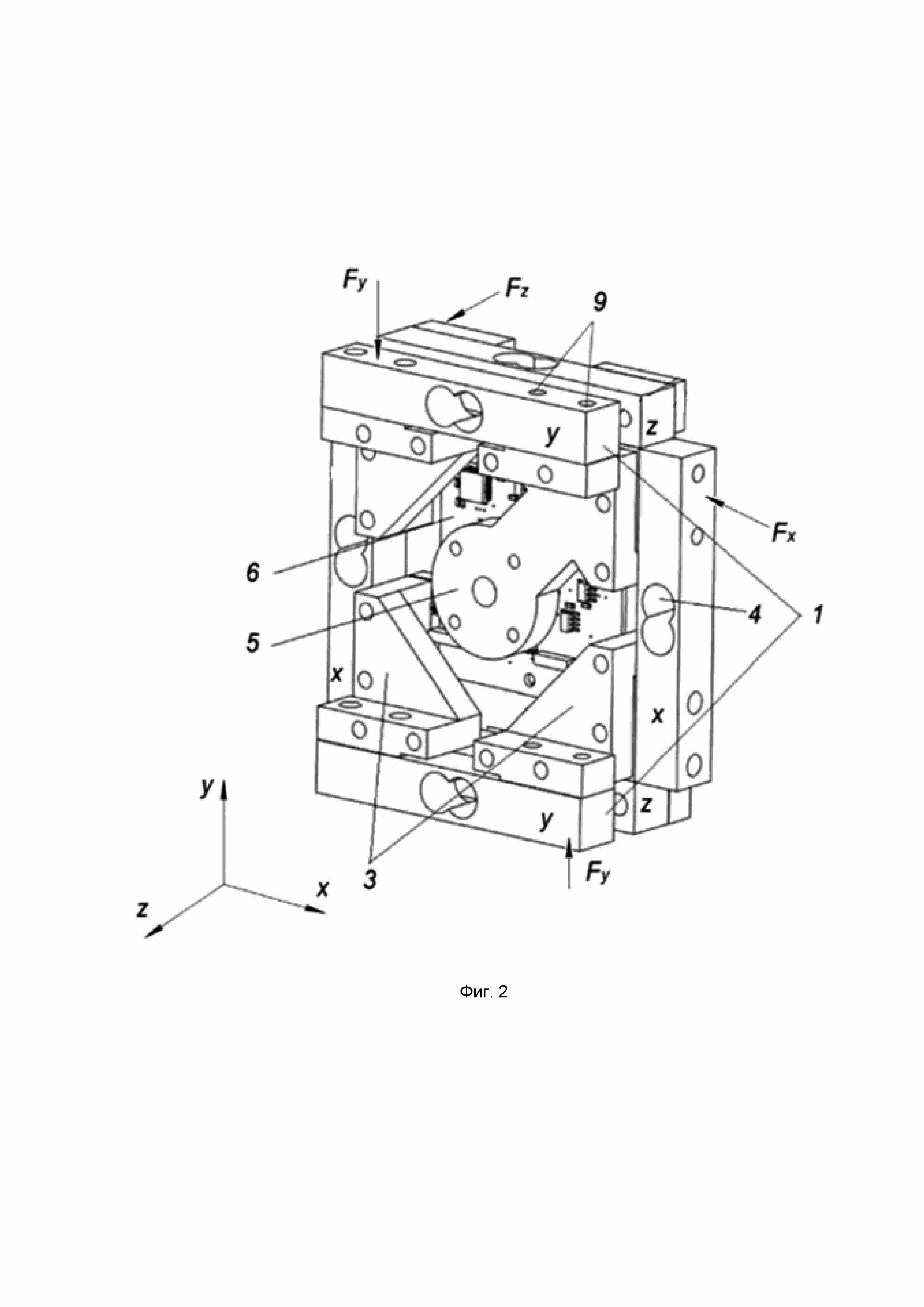
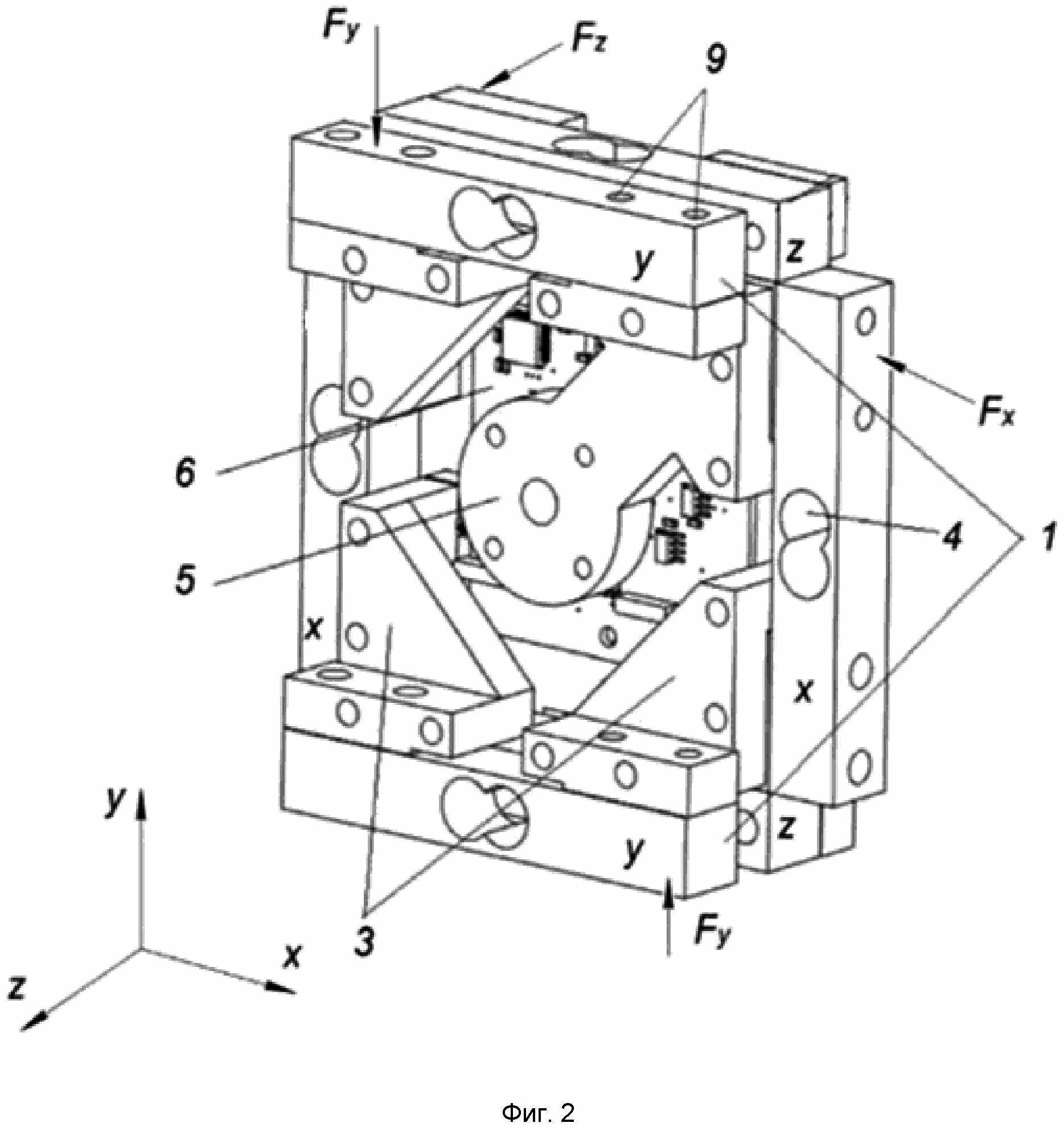
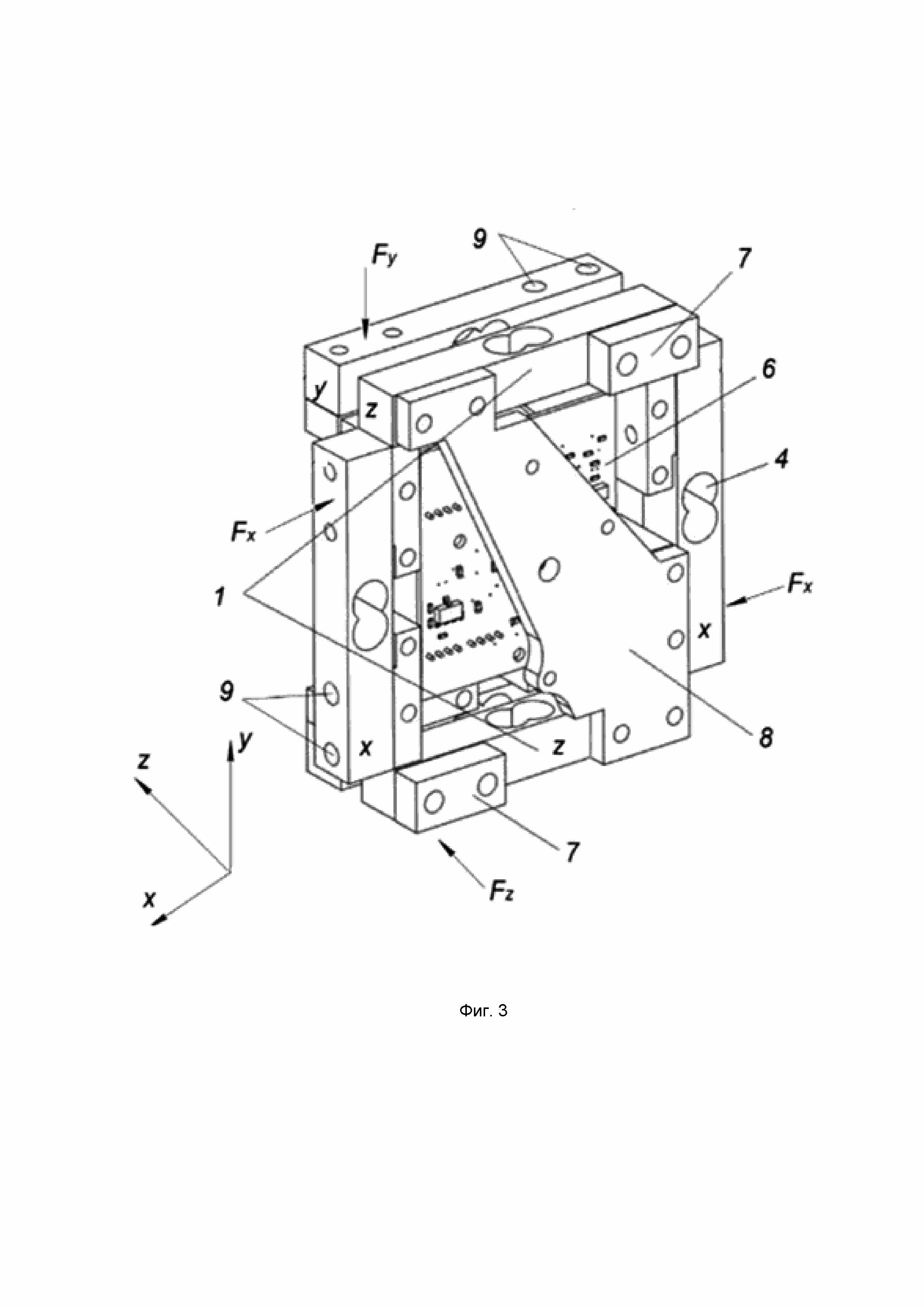
[016] На фиг. 2 и 3 показан общий вид варианта выполнения тензоплатформы с разных сторон.
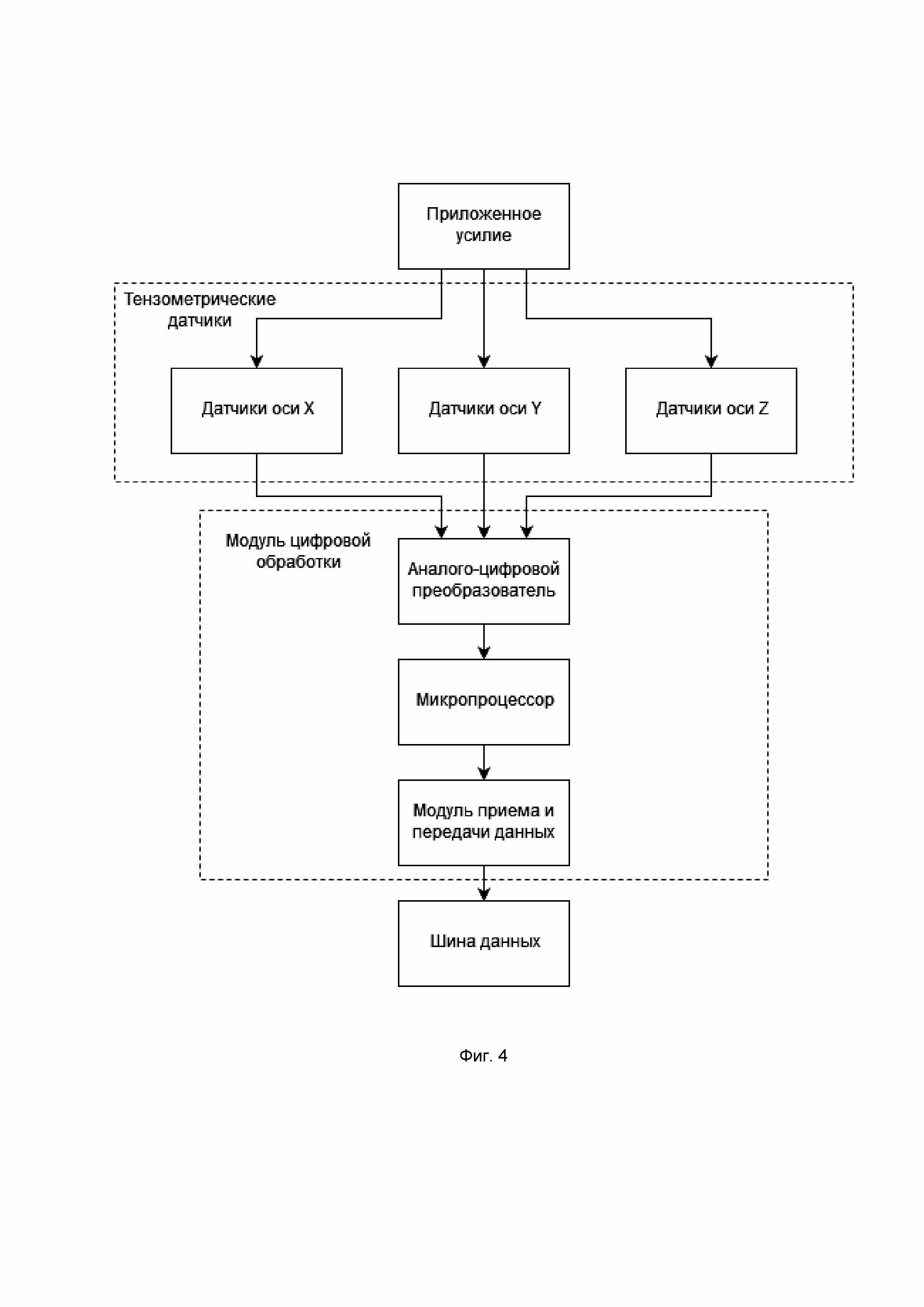
[017] На фиг. 4 изображена структурная схема работы тензоплатформы.
Подробное описание изобретения
[018] Для лучшего понимания настоящего изобретения ниже приведены некоторые термины, использованные в настоящем описании изобретения.
[019] В описании данного изобретения термины «включает» и «включающий» интерпретируются как означающие «включает, помимо всего прочего». Указанные термины не предназначены для того, чтобы их истолковывали как «состоит только из».
[020] В материалах настоящей заявки под термином «тензодатчик» понимают датчик, преобразующий величину деформации в удобный для измерения сигнал, например, электрический. В качестве метода измерений величины деформации может выступать любой метод измерения деформаций: тензорезистивный, пьезоэлектрический, оптико-поляризационный, пьезорезистивный, волоконно-оптический или простое считывание показаний с линейки механического тензодатчика.
[021] В материалах настоящей заявки «тензоблок» представляет собой специальную упругую конструкцию с закрепленными на ней по меньшей мере одним тензодатчиком и другими вспомогательными деталями.
[022] В материалах настоящей заявки «тензоплатформа» - трехмерная конструкция, содержащая несколько блоков измерения (тензоблоков), соединенных между собой, с закрепленными на них тензодатчиками.
[023] Примерные варианты осуществления настоящего изобретения, описанные ниже, приводятся исключительно в качестве примера и предназначены для иллюстративных целей и не предназначены для ограничения объема раскрываемого изобретения.
[024] В одном из вариантов осуществления тензоплатформа установлена в составе контроллера управления роботохирургическим комплексом между подвижной платформой и неподвижной платформой и соединена с последней посредством цилиндрических направляющих. Тензоплатформа выполнена с возможностью получения цифровой информации в трехмерном пространстве о прикладываемой силе, векторе приложения силы и ускорении приложения силы, передаваемой кистью и иными вышерасположенными частями руки оператора на контроллер во время управления роботохирургическим комплексом.
[025] Тензоплатформа (см. фиг. 1-3) содержит три пары одинаковых блоков измерения перемещений - тензоблоков (1), на каждом из которых размещены тензодатчики (2). Все блоки измерения перемещений жестко скреплены при помощи крепежных элементов через крепежные отверстия (9) и при помощи узлов крепления, например, уголков (3). На каждом блоке измерений перемещений (тензоблоке) установлено по две пары тензодатчиков, причем тензодатчики одной пары размещены в одной плоскости, а разные пары тензодатчиков размещены в параллельных друг к другу плоскостях. Каждый блок измерения перемещений (1) выполнен таким образом, чтобы исключить влияние возникающего в нем изгибающего момента на показания тензодатчиков. Для этого в центре каждого блока выполнено отверстие (4).
[026] Сами блоки измерения перемещений выполнены металлическими и жестко соединены между собой при помощи узлов крепления попарно параллельно друг другу, равноудаленно от центра таким образом, чтобы тензодатчики пары блоков измерения перемещений снимали показания о перемещении вдоль одной оси координат.
[027] В результате получается трехмерная конструкция, представляющая собой уложенные друг на друга блоки измерения перемещений, в котором каждая пара расположена в своей плоскости перпендикулярно другой паре блоков, расположенной в следующей плоскости, параллельной первой. Сборка тензоплатформы осуществляется в определенной последовательности с применением крепежных элементов и узлов крепления таким образом, чтобы в случае необходимости можно было обеспечить быструю замену блоков измерения перемещений. В данном примере реализации использовано три пары блоков измерения перемещений, что позволяет достоверно определить перемещения платформы вдоль всех трех координатных осей. В центре трехмерной конструкции, образованной парами блоков измерения перемещений, расположена площадка (силовая площадка) (5), воспринимающая силовое воздействие от руки оператора, жестко соединенная со всей трехмерной конструкцией таким образом, чтобы передавать усилия от рук без искажений. За площадкой, внутри трехмерной конструкции, расположен блок приема, обработки и передачи информации (6) от всех тензодатчиков, который взаимодействует с блоком управления контроллера. Вся трехмерная конструкция в части, противоположной площадке (5), оснащена двумя расположенными на одной диагонали площадками для базирования и крепления (7). Причем другая диагональ жестко соединена перемычкой (8) для повышения жесткости всей конструкции.
[028] Все элементы платформы могут быть выполнены из металла.
[029] При возникновении усилий со стороны оператора тензодатчики воспринимают приложенное механическое усилие (Fx, Fy, Fz - см. фиг. 2-3). Оно преобразуется в электрические сигналы в датчиках по каждой оси. Эти сигналы поступают на входные разъемы блока цифровой обработки (6), после чего усиливаются и поступают на входы аналогово-цифровых преобразователей, превращаясь в поток числовых данных. Затем производится обработка полученных дискретных цифровых сигналов для осуществления фильтрации их от нежелательного шума. Далее, значения действующих на блоки датчиков сил разбиваются на пакеты и передаются по цифровому интерфейсу передачи данных в блок управления хирургического робота, который на основе полученных данных производит необходимые расчеты и формирует команды: для задания усилия на управляемый контроллером хирургический инструмент, закрепленный в манипуляторе робота; для компенсации веса контроллера. При помощи приводов, установленных на контроллере, на основе расчетной команды блок управления хирургического робота перемещает блок позиционирования в требуемую позицию, компенсируя таким образом вес контроллера. В качестве интерфейса передачи данных могут выступать средства, предназначенные для реализации процесса коммуникации между различными устройствами посредством проводной и/или беспроводной связи, в частности, такими устройствами могут быть: Wi-Fi приемопередатчик, Bluetooth или BLE модуль, Ethernet и т.п. Структурная схема работы тензоплатформы приведена на фиг. 3.
[030] Несмотря на то, что изобретение описано со ссылкой на раскрываемые варианты воплощения, для специалистов в данной области должно быть очевидно, что конкретные подробно описанные варианты приведены лишь в целях иллюстрирования настоящего изобретения, и их не следует рассматривать как каким-либо образом ограничивающие объем изобретения. Должно быть понятно, что возможно осуществление различных модификаций, понятных для обычных специалистов данной области, без отступления от сути настоящего изобретения.
Контроллер кисти для использования в контроллере оператора роботохирургического комплекса
Контроллер запястья для использования в контроллере оператора роботохирургического комплекса
Контроллер оператора для управления роботохирургическим комплексом
Система позиционирования манипулятора роботохирургического комплекса
Ассистирующий хирургический комплекс
Способ управления камерой в роботохирургическом комплексе
Оценка усилия на роботохирургическом инструменте
Комбинированный манипулятор роботохирургического комплекса
Устройство для контроля натяжения субуретральной петли при лечении недержания мочи
Устройство для хирургической коррекции пролапса тазовых органов у женщин (варианты)
Автономный мобильный модуль роботизированного хирургического инструмента
Контроллер кисти для использования в контроллере оператора роботохирургического комплекса
Способ определения степени злокачественности аденокарциномы предстательной железы
Контроллер запястья для использования в контроллере оператора роботохирургического комплекса
Контроллер оператора для управления роботохирургическим комплексом
Система позиционирования манипулятора роботохирургического комплекса
Ассистирующий хирургический комплекс
Способ управления камерой в роботохирургическом комплексе

