Результат интеллектуальной деятельности: СИСТЕМА И СПОСОБ ДЛЯ ПОЗИЦИОНИРОВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ АТТРАКЦИОНА ПАРКА РАЗВЛЕЧЕНИЙ
Вид РИД
Изобретение
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
[0001] Данная заявка испрашивает приоритет по предварительной заявке на выдачу патента США № 62/141,086, озаглавленной «SYSTEM AND METHOD FOR POSITIONING PODS OF AN AMUSEMENT PARK ATTRACTION»(«СИСТЕМА И СПОСОБ ДЛЯ ПОЗИЦИОНИРОВАНИЯ КОНТЕЙНЕРОВ АТТРАКЦИОНА ПАРКА РАЗВЛЕЧЕНИЙ»), поданной 31 марта 2015 года, которая полностью включена в материалы настоящей заявки посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0002] Настоящее изобретение в целом относится к области парков развлечений. Более конкретно, варианты осуществления настоящего изобретения относятся к системам и способам, используемым для предоставления впечатлений парка развлечений.
УРОВЕНЬ ТЕХНИКИ
[0003] Данный раздел предназначен для ознакомления читателя с различными аспектами данной области техники, которые могут иметь отношение к различным аспектам настоящих технологий, которые описаны и/или заявлены в формуле изобретения ниже. Считается, что это обсуждение полезно в снабжении читателя вспомогательной информацией для содействия лучшему пониманию различных аспектов настоящего изобретения. Соответственно, стоит понимать, что эти изложения должны толковаться в этом свете, а не в качестве признания предшествующего уровня техники.
[0004] Парки развлечений часто включают в себя аттракционы, которые используют имитируемые соревновательные обстоятельства между участниками аттракциона. Например, аттракционы могут содержать автомобили или поезда, в которых пользователи участвуют в гонке друг с другом вдоль пути (например, соревновательные американские горки и карты). Использование соревновательных обстоятельств может обеспечивать дополнительную ценность развлечения для пользователей, а также повышать разнообразие для пользователей, использующих аттракцион множество раз. Тем не менее, традиционные системы (см. например, заявку на патент США 2009/0272289, A63G 21/08, 05.11.2009) могут включать в себя несколько секций путей, чтобы обеспечивать имитируемые соревновательные обстоятельства, тем самым увеличивая стоимость и сложность аттракциона. Следует отметить, что необходимо обеспечить улучшенные системы и способы для имитируемых гоночных аттракционов, которые обеспечивают впечатления для пользователей.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0005] Некоторые варианты осуществления, соизмеримые по объему с изначально заявленным предметом изобретения, обсуждаются ниже. Эти варианты осуществления не предназначены для ограничения объема изобретения. Действительно, настоящее изобретение может охватывать много различных форм, которые могут быть схожими с вариантами осуществления, изложенными ниже, или могут отличаться от них.
[0006] Согласно одному из вариантов осуществления, устройство для парка развлечений включает в себя систему тележек, расположенную на пути. Система тележек направляет движение вдоль пути. Устройство также включает в себя плечо, продолжающееся радиально наружу от системы тележек. Плечо с возможностью вращения присоединено к корпусу системы тележек. Более того, устройство включает в себя транспортное средство, расположенное на плече. Система тележек выполнена с возможностью перемещения в рабочем направлении вдоль пути, а транспортное средство выполнено с возможностью вращения вокруг системы тележек для изменения положения транспортного средства относительно системы тележек.
[0007] Согласно другому варианту осуществления, система включает в себя систему тележек, расположенную на пути, при этом система тележек выполнена с возможностью перемещения вдоль пути, множество плечей, продолжающихся радиально наружу от системы тележек, при этом каждое из множества плечей с возможностью вращение присоединено к корпусу системы тележек, и множество транспортных средств, где каждое транспортное средство из множества транспортных средств расположено на соответствующем плече из множества плечей, и где множество транспортных средств расположены в разных друг от друга местоположениях относительно системы тележек.
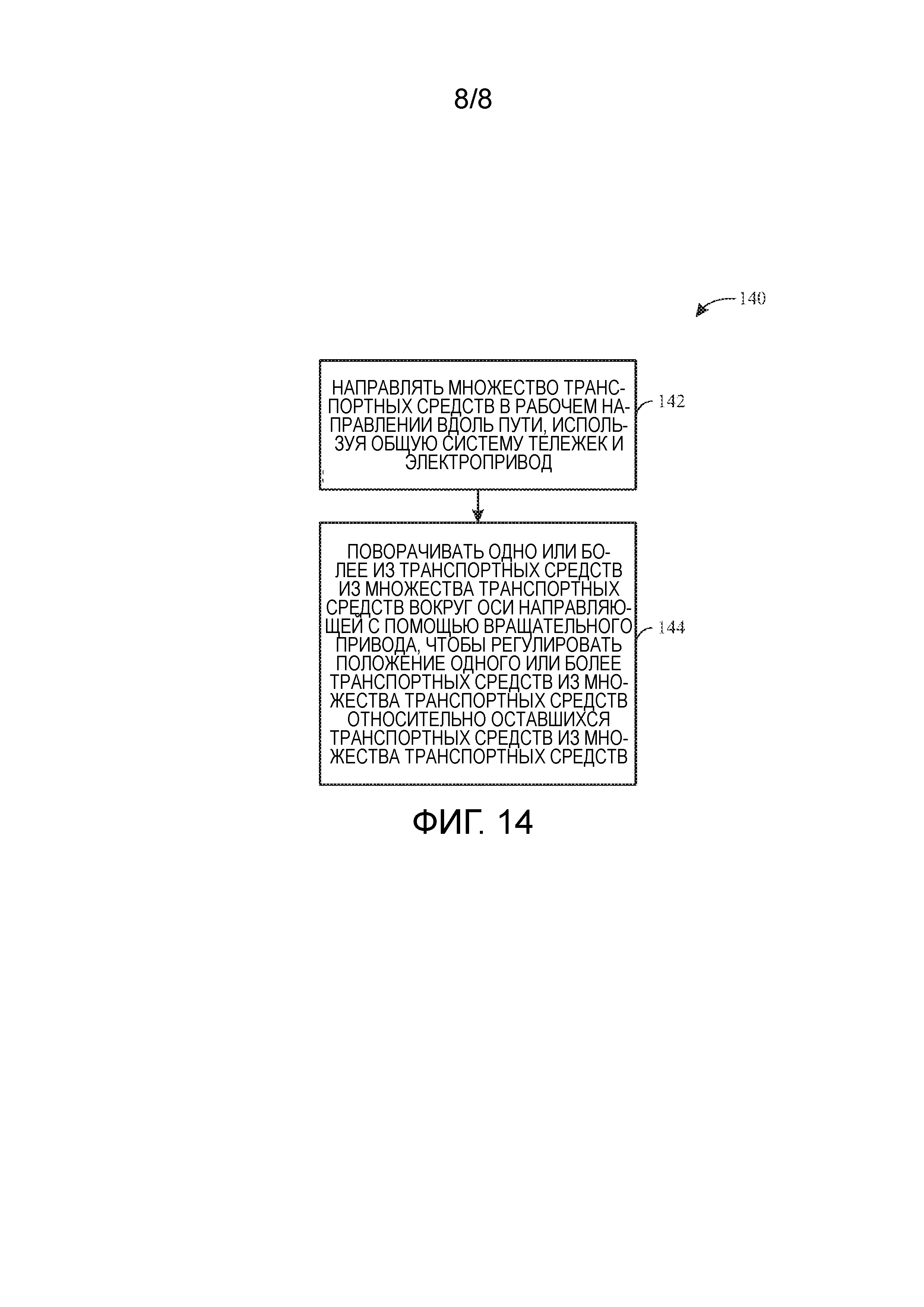
[0007] Согласно другому варианту осуществления, способ управления аттракционом контроллером автоматизации и приводами включает в себя направление множества транспортных средств в рабочем направлении вдоль пути, используя общую систему тележек и электропривод, и вращение одного или более транспортных средств из множества транспортных средств вокруг оси направляющей с помощью вращательного привода, чтобы регулировать положение одного или более транспортных средств из множества транспортных средств относительно оставшихся транспортных средств из множества транспортных средств.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0009] Эти и другие признаки, аспекты и преимущества настоящего изобретения станут более понятными при прочтении последующего подробного описания со ссылкой на прилагаемые чертежи, на которых одинаковые позиции обозначают одинаковые элементы на всех чертежах и на которых:
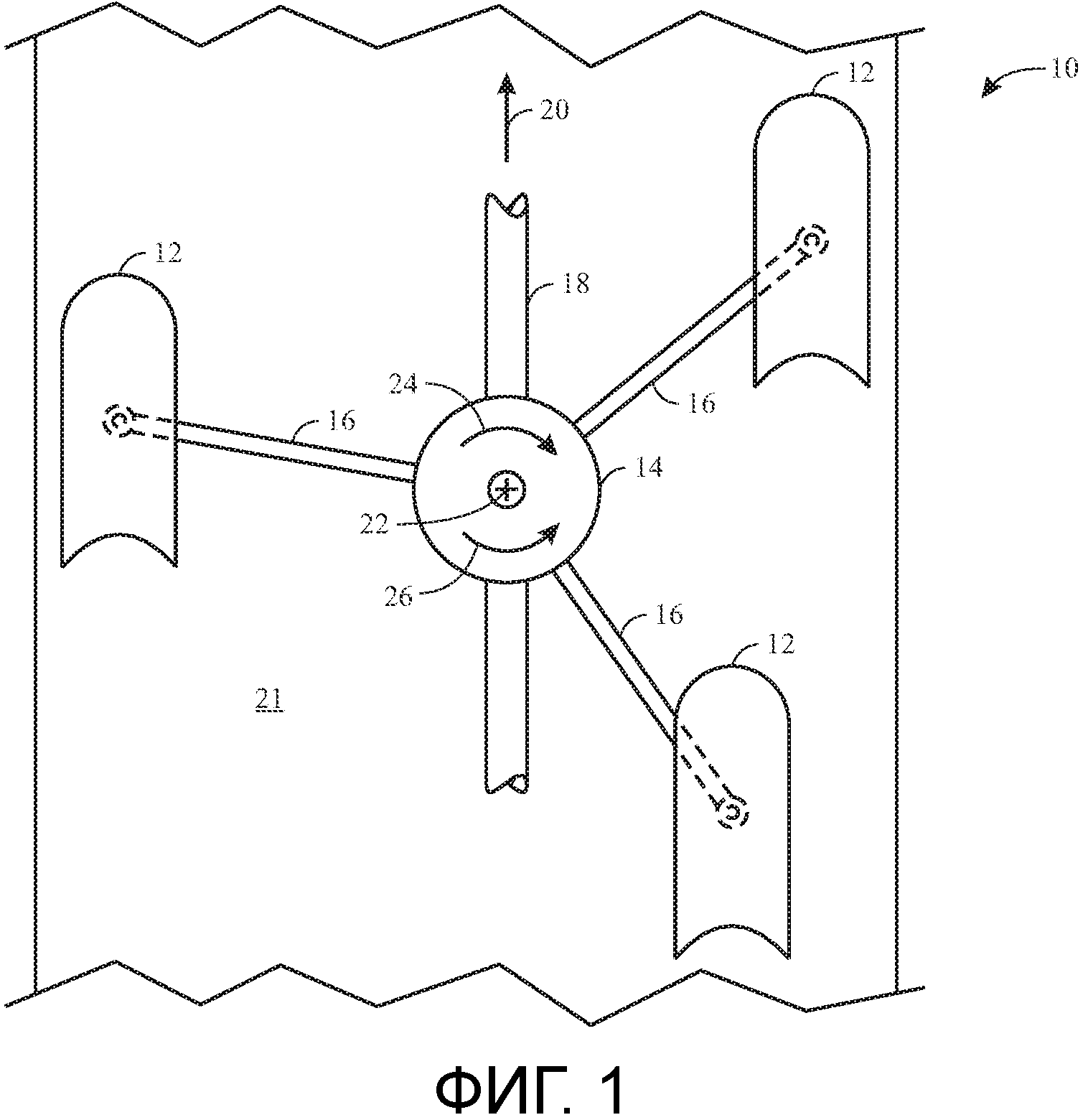
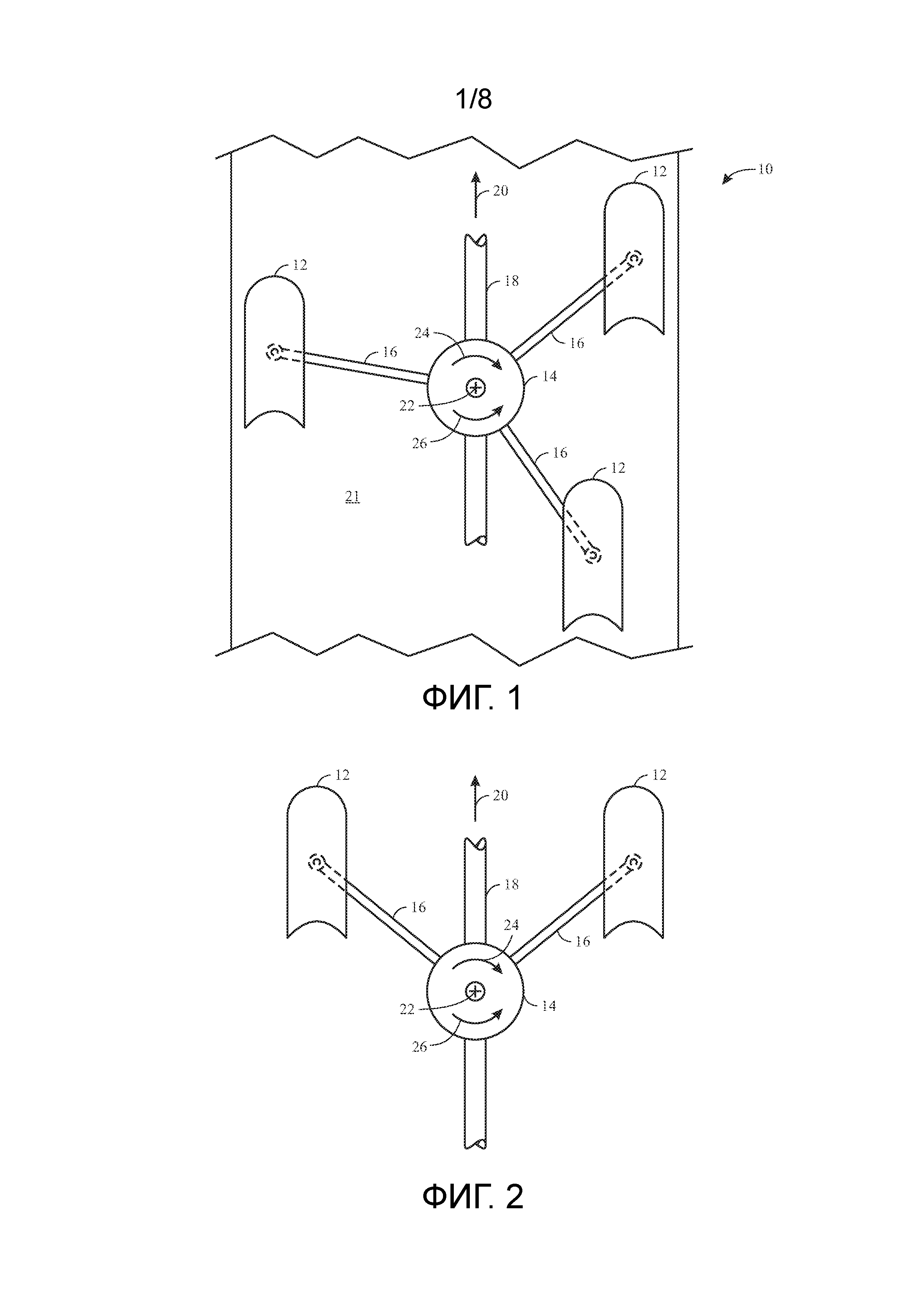
[0010] Фиг.1 представляет собой вид сверху варианта осуществления гоночного средства, содержащего три транспортных средства, расположенных вокруг направляющей, согласно аспекту настоящего изобретения;
[0011] Фиг.2 представляет собой вид сверху варианта осуществления гоночного средства, содержащего два транспортных средства, расположенных вокруг направляющей, согласно аспекту настоящего изобретения;
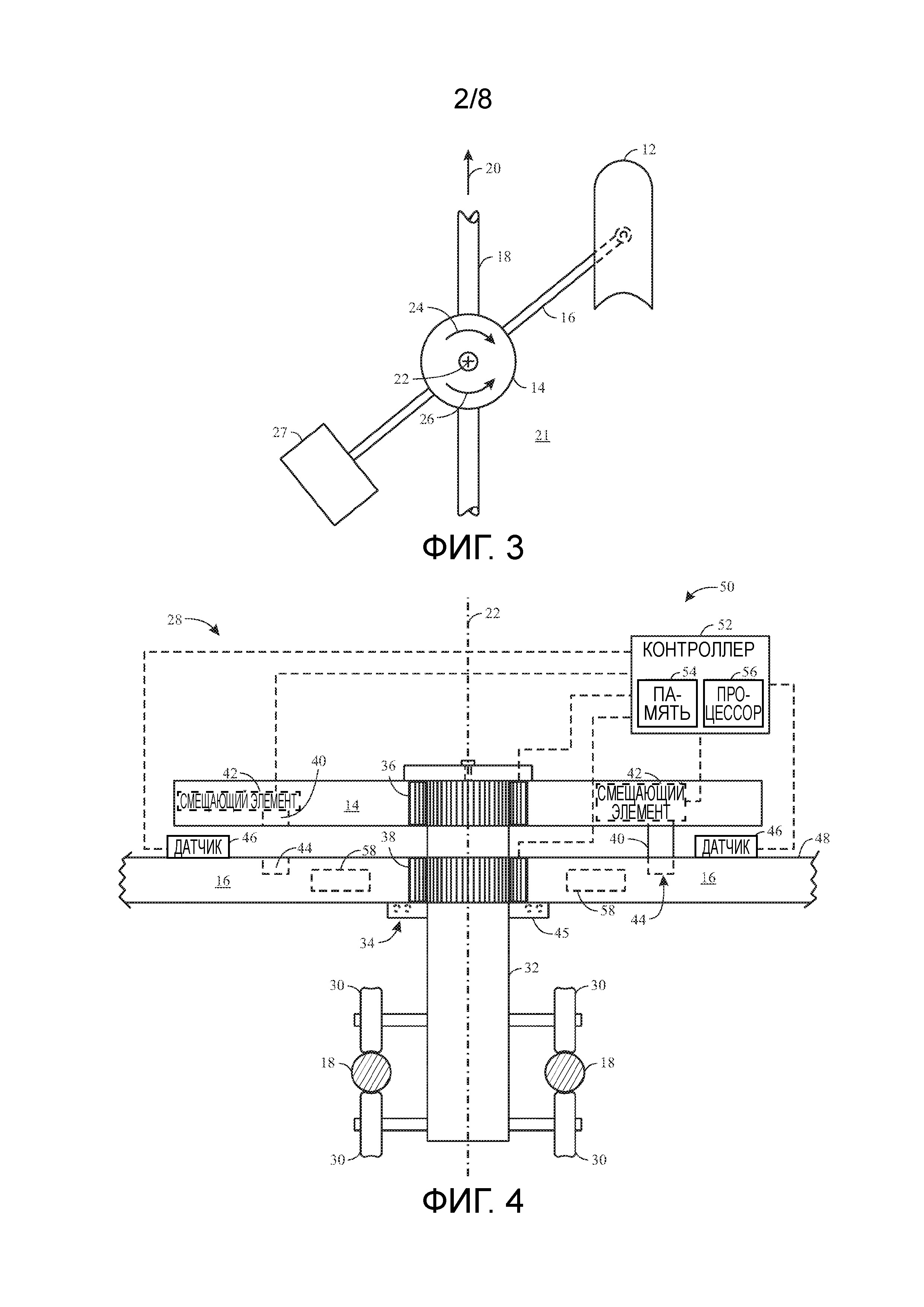
[0012] Фиг.3 представляет собой вид сверху варианта осуществления гоночного средства, содержащего одно транспортное средство, расположенное вокруг направляющей, согласно аспекту настоящего изобретения;
[0013] Фиг.4 представляет собой вид в вертикальной проекции в поперечном разрезе варианта осуществления системы приведения в движение гоночного средства по фиг.1, согласно аспекту настоящего изобретения;
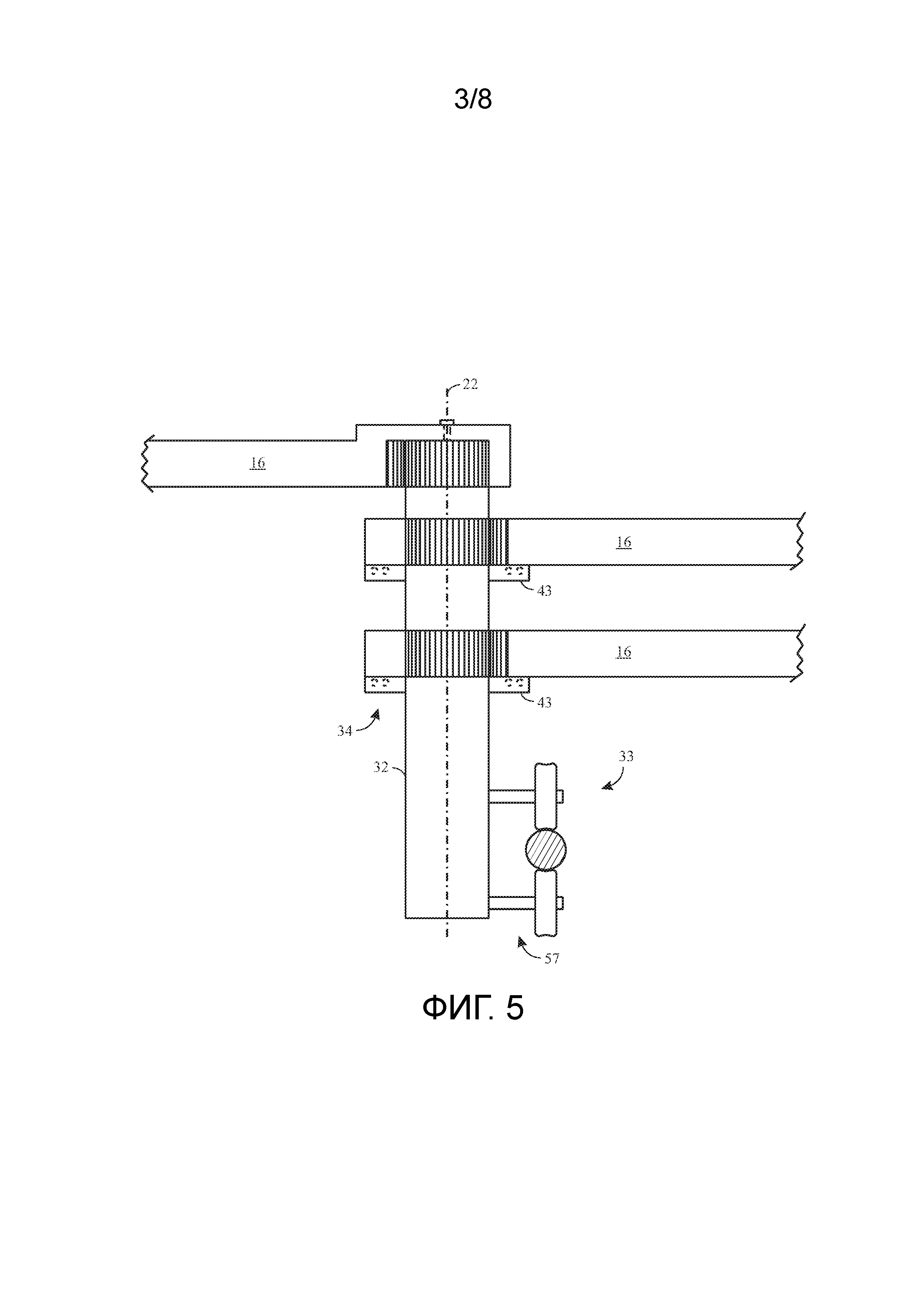
[0014] Фиг.5 представляет собой вид в вертикальной проекции в поперечном разрезе варианта осуществления системы тележек гоночного средства, согласно аспекту настоящего изобретения;
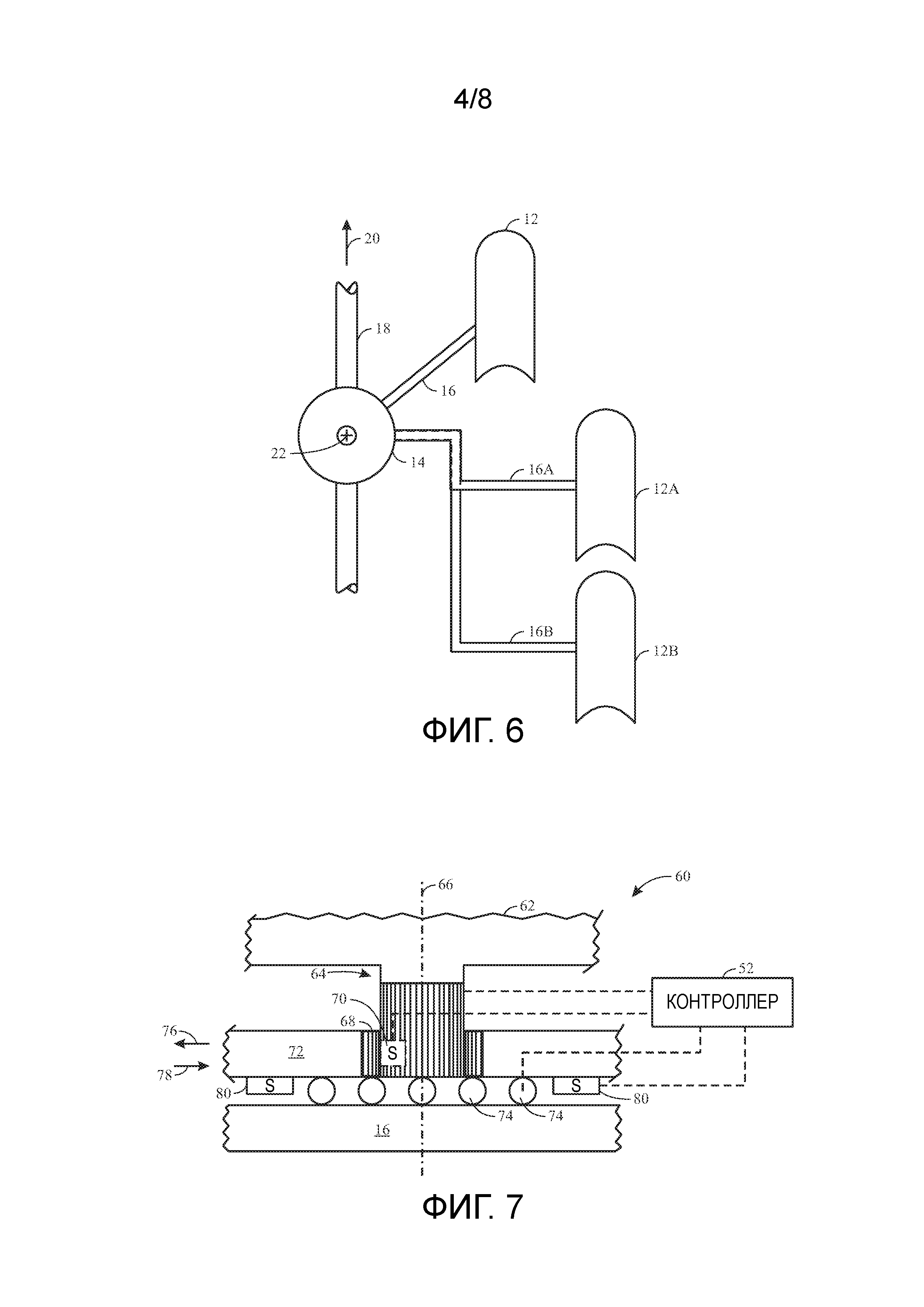
[0015] Фиг.6 представляет собой вид сверху варианта осуществления гоночного средства, содержащего одно или более плечей, которые включают в себя излом или изгиб, согласно аспекту настоящего изобретения;
[0016] Фиг.7 представляет собой вид в вертикальной проекции в поперечном разрезе варианта осуществления системы присоединения транспортного средства гоночного средства по фиг.1, согласно аспекту настоящего изобретения;
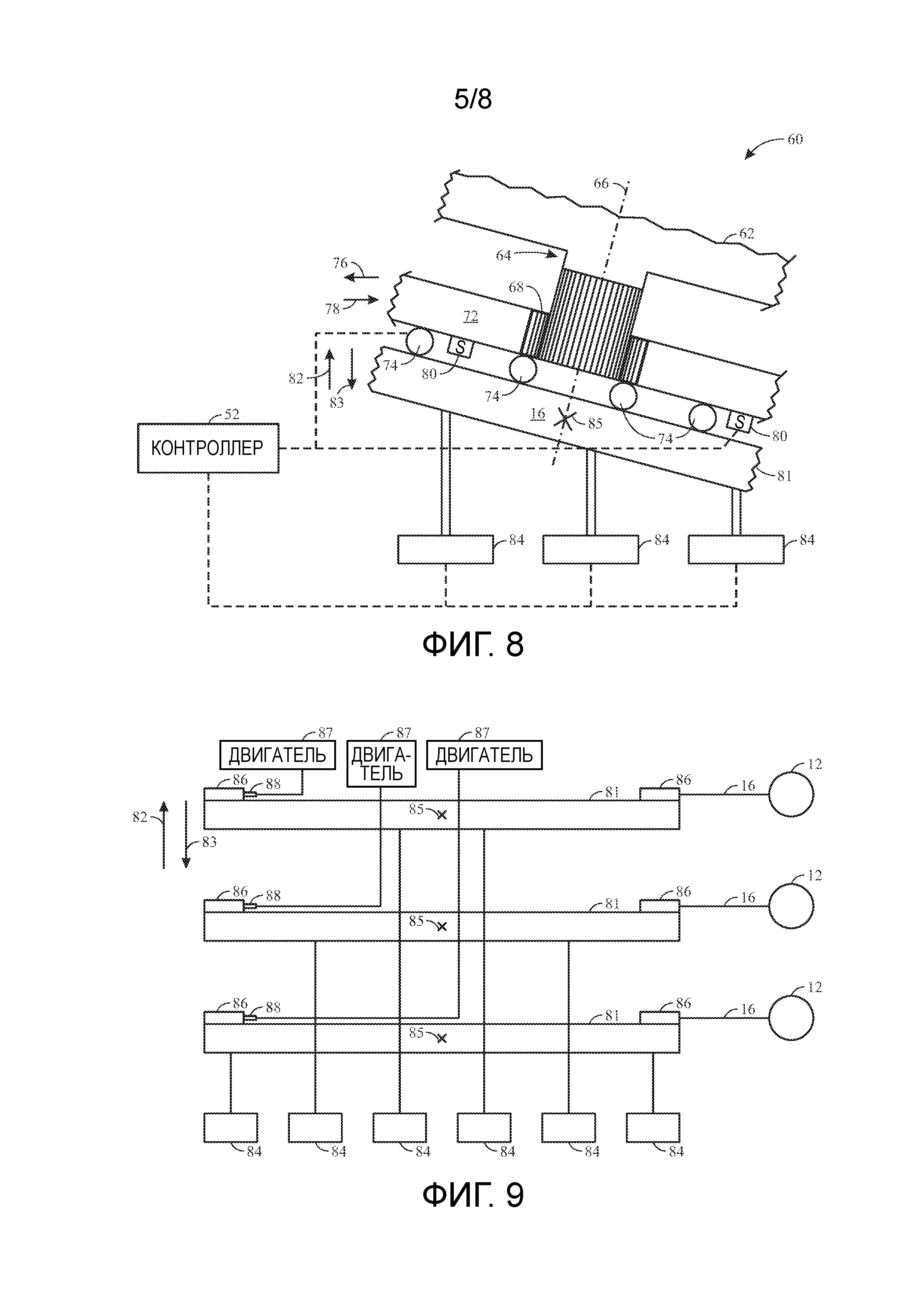
[0017] Фиг.8 представляет собой вид сбоку в поперечном разрезе другого варианта осуществления системы присоединения транспортного средства по фиг.6, которая использует наклонную плиту и ролики, согласно аспекту настоящего изобретения;
[0018] Фиг.9 представляет собой схему другого варианта осуществления системы присоединения транспортного средства по фиг.6, которая использует множество регулируемых наклонных плит, которые включают в себя поворотные плиты, согласно аспекту настоящего изобретения;
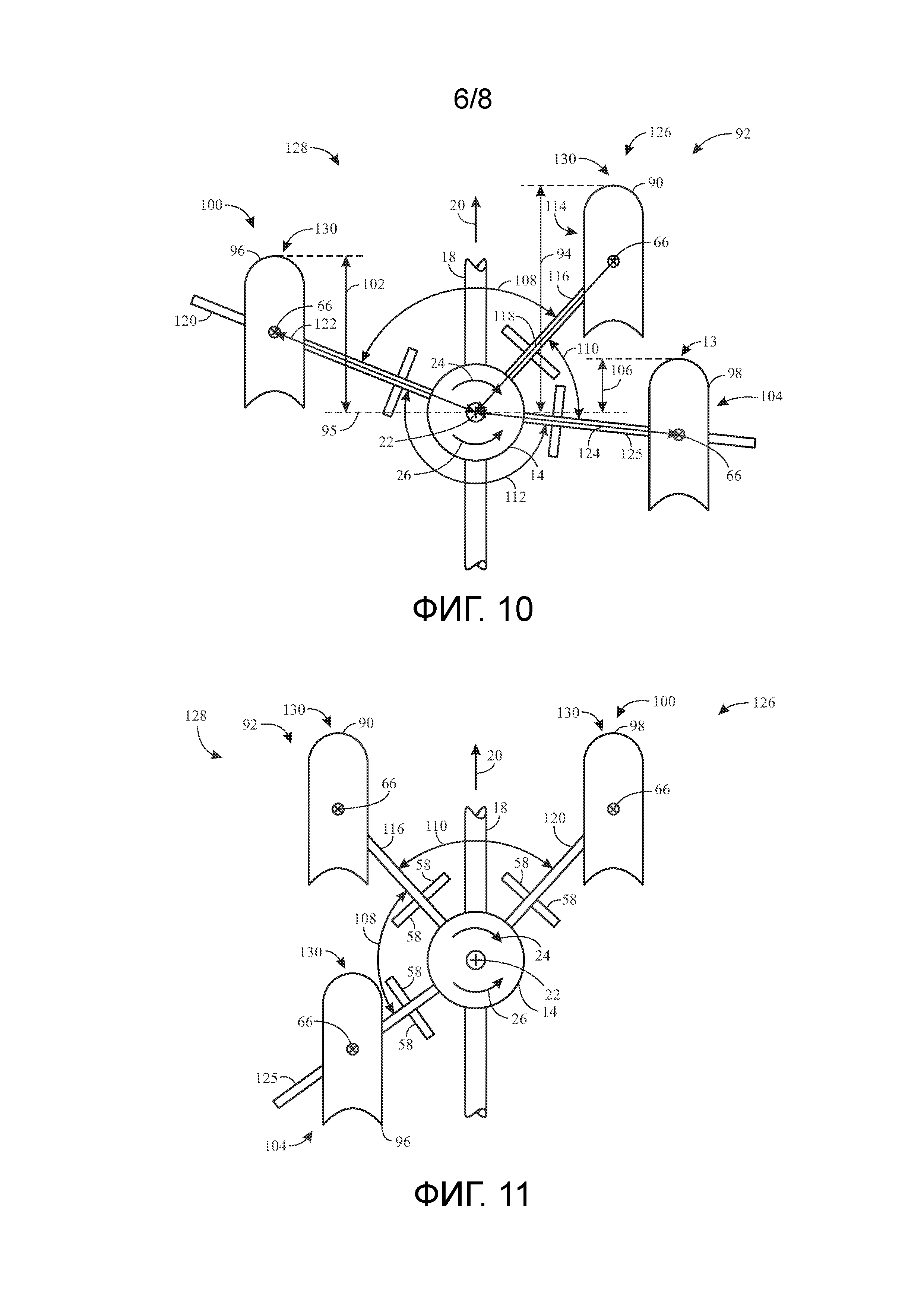
[0019] Фиг.10 представляет собой вид сверху варианта осуществления гоночного средства по фиг.1, в котором первое транспортное средство находится в положении на первом месте, второе транспортное средство находится в положении на втором месте, а третье транспортное средство находится в положении на третьем месте, согласно аспекту настоящего изобретения;
[0020] Фиг.11 представляет собой вид сверху гоночного средства по фиг.10, в котором первое транспортное средство находится в положении на первом месте, второе транспортное средство находится в положении на третьем месте, а третье транспортное средство находится в положении на втором месте, согласно аспекту настоящего изобретения;
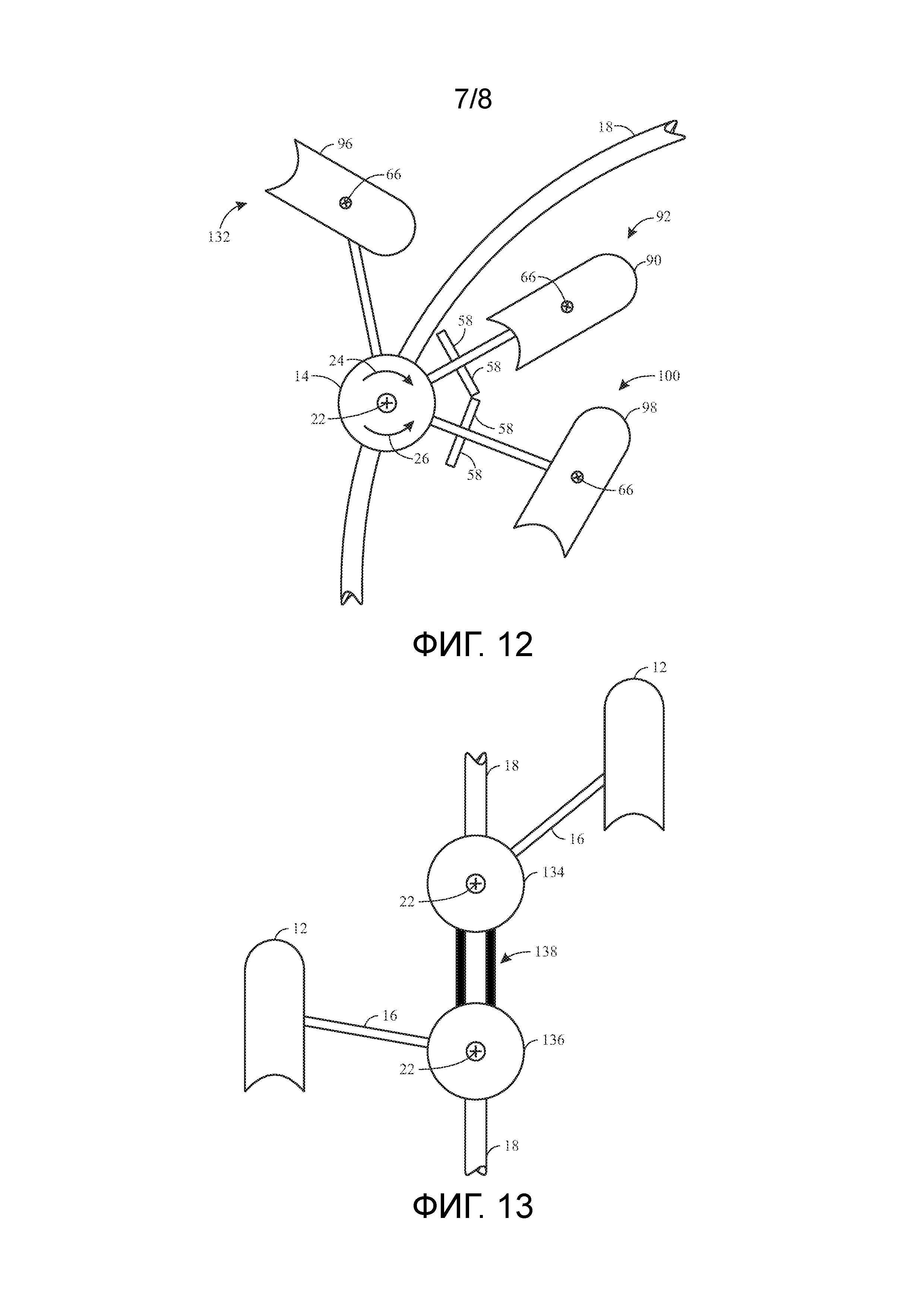
[0021] Фиг.12 представляет собой вид сверху варианта осуществления гоночного средства по фиг.1, в котором путь включает в себя изогнутую секцию, согласно аспекту настоящего изобретения;
[0022] Фиг.13 представляет собой вид сверху варианта осуществления механизма прикрепления, присоединяющего первую направляющую ко второй направляющей, согласно аспекту настоящего изобретения; и
[0023] Фиг.14 иллюстрирует блок-схему последовательности операций варианта осуществления способа управления положением транспортных средств гоночного средства по фиг.1, согласно аспекту настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0024] Один или более конкретных вариантов осуществления настоящего изобретения будут описаны ниже. В попытке дать лаконичное описание этих вариантов осуществления, все признаки фактической реализации могут не быть описаны в описании изобретения. Должно быть принято во внимание, что при разработке любой такой фактической реализации, в качестве технического проекта или опытно-конструкторской разработки, многочисленные характерные для реализации решения должны быть приняты для достижения определенных целей разработчиков, таких как совместимость с имеющими отношение к системе и имеющими отношение к коммерческой деятельности ограничениями, которые могут меняться от одной реализации к другой. Более того, должно быть принято во внимание, что такие направленные на разработку усилия могли бы быть сложными и трудоемкими, но, тем не менее, быть обычным делом по разработке, конструированию и производству для рядовых специалистов в данной области техники, обладающих выгодами этого изобретения.
[0025] Аттракционы в парках развлечений, которые используют соревновательные обстоятельства (например, гонки между пользователями), могут быть ограничены физическими ограничениями опорной поверхности аттракциона и степенью контроля над опытом катания. Например, транспортные средства для катания (например, карты) могут взаимодействовать друг с другом, но их взаимодействия обычно основаны на отдельных пользователях, и природа опыта, таким образом, будет ограничена (например, транспортные средства обычно выполнены, чтобы ехать сравнительно медленно). Некоторые гоночные аттракционы включают в себя несколько секций путей (например, путей американских горок) с прикрепленными транспортными средствами для катания, чтобы обеспечивать более централизованное управление опытом катания. Эти пути могут содержать отдельные транспортные средства для катания, занимаемые пользователями во время катания на аттракционе. К сожалению, стоимость строительства и управления аттракционом может возрастать из-за дополнительных секций путей. Дополнительно, сложность системы управления, связанная с формированием соревновательной гоночной среды, может возрастать из-за того, что несколько разных секций путей могут быть использованы в аттракционе. Дополнительно, наличие транспортных средств для катания на разных секциях путей может усложнять имитирование определенных взаимодействий (например, обгон одного транспортного средства для катания другим или езда по одной полосе с другим транспортным средством), так как секции путей должны были бы сливаться или пересекаться друг с другом.
[0026] Настоящие варианты осуществления изобретения направлены на содействие имитируемому соревновательному гоночному аттракциону, образом, который дает пользователям иллюзию управления результатом гонки. В качестве используемой в материалах настоящей заявки, имитируемая соревновательная гонка может указывать ссылкой на имитирование меняющихся скоростей и положений транспортных средств, выполненных для размещения пользователей во время аттракциона. Транспортные средства могут включать в себя отдельные области для сидения или контейнеры для пользователей, каждый из которых выполнен с возможностью отдельного перемещения вокруг централизованной тележки. Например, пользователи могут располагаться в соседних транспортных средствах, присоединенных к одной направляющей (включающей в себя одну или более тележек) и пути. В некоторых вариантах осуществления, отдельные тележки или направляющие могут поддерживать отдельные транспортные средства, и тележки могут быть соединены или расположены рядом друг с другом, чтобы достичь схожих эффектов.
[0027] Путь может имитировать гоночный трек (например, дорогу, содержащую повороты, наклоны, кривые, или тому подобное) при этом положение транспортных средств относительно друг друга может меняться на протяжении катания. Например, первое транспортное средство может «обгонять» второе транспортное средство вдоль кривой, чтобы имитировать перехват первым транспортным средством лидерства в гонке. Создание такого эффекта может повышать привлекательность аттракциона посредством обеспечения изменяемого опыта каждый раз, когда пользователь посещает аттракцион (например, транспортное средство, которое финиширует на первом месте, может меняться в каждом катании).
[0028] В некоторых вариантах осуществления, гоночное средство включает в себя транспортные средства, расположенные вокруг направляющей, сконфигурированной, чтобы перемещать гоночное средство вдоль пути. Транспортные средства могут быть присоединены к плечам, продолжающимся из направляющей, которые обеспечивают возможность вращательного движения вокруг оси направляющей. Например, привод может осуществлять вращательное движение плечей и/или направляющей, чтобы регулировать положение вдоль окружности транспортных средств вокруг оси направляющей. Более того, в некоторых вариантах осуществления, транспортные средства могут быть выполнены, чтобы вращаться вокруг оси транспортного средства (например, оси, по существу параллельной оси направляющей в местоположении, в котором транспортное средство присоединено к плечу), тем самым позволяя транспортным средствам вращаться и/или поворачиваться без регулировки положения вдоль окружности транспортных средств вокруг оси направляющей. Более того, транспортные средства могут быть выполнены, чтобы перемещаться радиально относительно оси направляющей. В некоторых вариантах осуществления, система управления может принимать сигналы с датчиков, расположенных вокруг гоночного средства. Например, система управления может принимать сигнал, указывающий на положение вдоль окружности транспортных средств вокруг оси направляющей. Более того, контроллер может выводить сигналы на привод, чтобы регулировать положение вдоль окружности транспортных средств. В результате, транспортные средства могут быть приведены во вращение вокруг оси направляющей, чтобы регулировать положение вдоль окружности транспортных средств во время работы аттракциона.
[0029] Помня о вышеупомянутом, фиг.1 иллюстрирует вариант осуществления вида сверху гоночного средства 10. Гоночное средство 10 включает в себя транспортные средства 12, присоединенные к направляющей 14 с помощью держателей 16. Направляющая 14 выполнена, чтобы направлять движение транспортных средств 12 вдоль пути 18 в рабочем направлении 20. То есть, направляющая 14 приводится в движение вдоль пути 18, и транспортные средства 12 следуют за движением направляющей 14. В то время как проиллюстрированные варианты осуществления включают в себя по существу прямой путь 18, в других вариантах осуществления, путь 18 может быть дугообразным, круглым, многоугольным, или может иметь любую другую форму, которая может имитировать путь движения (например, реку). Например, путь 18 может включать в себя S-образные изгибы и резкие повороты, чтобы улучшить впечатление, предоставляемое пользователю во время работы. В некоторых вариантах осуществления, направляющая 14 может включать в себя ролики (например, колеса), выполненные, чтобы присоединяться к пути 18, чтобы обеспечивать возможность перемещения вдоль пути 18 в рабочем направлении 20. В других вариантах осуществления, направляющая 14 и/или путь 18 могут быть расположены в щели или желобе под поверхностью 21 земли (например, на искусственной гоночной поверхности), с тем чтобы направляющая 14 и/или путь 18 были по существу были скрыты от зрения пассажиров. Другими словами, направляющая 14 и/или путь 18 могут быть заблокированы с точек наблюдения в контейнерах поверхностью 21 земли.
[0030] В проиллюстрированном варианте осуществления по фиг.1, транспортные средства 12 выполнены, чтобы вращаться вокруг оси 22 направляющей в первом направлении 24 вращения (например, по часовой стрелке относительно фиг.1) и во втором направлении 26 вращения (например, против часовой стрелки относительно фиг.1). 1). Более того, направляющая 14 может вращаться вокруг оси 22 направляющей в первом направлении 24 вращения и втором направлении 26 вращения. Как будет более подробно описано ниже, вращение транспортных средств 12 и/или направляющей 14 вокруг оси 22 направляющей может обеспечивать возможность регулировки положения транспортных средств 12 относительно друг друга, тем самым создавая иллюзию того, что одно транспортное средство 12 обгоняет другое транспортное средство 12 в гонке. Будет принято во внимание, что, в то время как проиллюстрированный вариант осуществления включает в себя три транспортных средства 12, расположенных вокруг направляющей 14, в других вариантах осуществления может быть 1, 2, 4, 5, 6, 7, 8, 9, 10 или любое другое подходящее количество транспортных средств 12.
[0031] Например, фиг.2 представляет собой вид сверху гоночного средства 10, содержащего два транспортных средства 12, расположенных вокруг направляющей 14. Более того, фиг.3 представляет собой вид сверху гоночного средства 10, содержащего одно транспортное средство 12, расположенное вокруг направляющей. В проиллюстрированном варианте осуществления по фиг.3, противовес 27 может быть расположен напротив транспортного средства 12, чтобы снижать любые нагрузки на направляющей 14 и/или на пути 18, вызванные весом транспортного средства 12. В некоторых вариантах осуществления, противовес 27 может быть расположен в щели или желобе под поверхностью 21 земли, с тем чтобы противовес 27 был скрыт от зрения пассажиров. Дополнительно, в варианте осуществления по фиг.3, может быть несколько путей 18 и/или направляющих 14, чтобы позволить нескольким транспортным средствам 12 участвовать в гонке независимо друг от друга (например, транспортные средства 12, присоединенные к отдельным путям 18, могут быть направлены в одном общем направлении, чтобы имитировать гонку). В других вариантах осуществления, гоночное средство 10 может не включать в себя противовес 27.
[0032] Фиг.4 представляет собой вид сбоку в поперечном разрезе системы 28 приведения в движение, выполненной, чтобы осуществлять перемещение и/или вращение гоночного средства 10. Система 28 приведения в движение с возможностью перемещения присоединена к пути 18 через ролики 30. В некоторых вариантах осуществления, ролики 30 могут включать в себя двигатели (например, электродвигатели), чтобы осуществлять вращательное движение роликов 30, чтобы перемещать гоночное средство 10 вдоль пути 18 в рабочем направлении 20 (и/или в противоположном направлении). Соответственно, транспортные средства 12 могут перемещаться вдоль пути 18, чтобы имитировать гонку. В других вариантах осуществления, ролики 30 могут перемещаться вдоль пути 18 с помощью гравитационных сил и/или любой другой подходящей технологии для перемещения гоночного средства 10 вдоль пути 18. Кроме того, корпус 32 соединен с роликами 30 и поддерживает их. Следует понимать, что корпус 32 может быть сформирован из металлов (например, стали) композитных материалов (например, включающих в себя углеродное волокно) или тому подобного. В проиллюстрированном варианте осуществления, корпус 32 включает в себя шарнир 34, который позволяет направляющей 14 и плечам 16 вращаться вокруг оси 22 направляющей, тем самым регулируя положение вдоль окружности транспортных средств 12 относительно оси 22 направляющей.
[0033] В проиллюстрированном варианте осуществления, направляющая 14 включает в себя первый привод 36, выполненный, чтобы осуществлять вращательное движение направляющей 14 вокруг оси 22 направляющей (и, в некоторых вариантах осуществления, движение плечей 16 вокруг оси 22 направляющей). Например, первый привод 36 может являться приводом поворота вокруг вертикальной оси, который переносит вращательное движение между зацепленными шестернями. Кроме того, в других вариантах осуществления, первый привод 36 может являться вращательным приводом, выполненным, чтобы осуществлять вращение направляющей 14 по приему сигнала с системы управления. Вращение направляющей 14 может регулировать положение транспортных средств 12 относительно друг друга, тем самым обеспечивая иллюзию того, что одно транспортное средство 12 обгоняет другое во время гонки. Как будет описано ниже, в некоторых вариантах осуществления, вращение направляющей 14 может не регулировать положение транспортных средств 12. Например, в некоторых вариантах осуществления, транспортные средства 12 могут не быть с возможностью вращения присоединены к направляющей 14.
[0034] Как показано на фиг.4, плечи 16 с возможностью вращения присоединены к шарниру 34, чтобы обеспечивать возможность отдельного, выборочного вращения транспортных средств 12 вокруг оси 22 направляющей с помощью второго привода 38 (например, соответствующего второго привода для каждого транспортного средства 12 или группы транспортных средств 12). Как описано выше в отношении привода 14, второй привод 38 осуществляет вращение плеча 16 вокруг оси 22 направляющей, чтобы регулировать положение транспортного средства 12 относительно других транспортных средств 12. Соответственно, транспортные средства 12 могут по отдельности вращаться вокруг оси 22 направляющей, чтобы независимо регулировать положение транспортных средств 12 относительно друг друга. Тем не менее, в некоторых вариантах осуществления, плечи 16 могут быть присоединены к направляющей 14, с тем чтобы вращение направляющей 14 вокруг оси 22 направляющей осуществляло вращение каждого из плечей 16 вокруг оси 22 направляющей. Например, направляющая 14 может включать в себя штифт 40, приводимый в движение смещающим элементом 42. В некоторых вариантах осуществления, смещающий элемент 42 включает в себя линейный привод (например, винтовой привод, магнитный привод, электрический привод), который прикладывает силу, чтобы перемещать штифт 40 в направлении плеча 16. Штифт 40 может входить в углубление 44 в плече 16, и, тем самым, съемным образом присоединять плечо 16 к направляющей 14. Следует понимать, что штифты 40 могут быть расположены вокруг окружности направляющей 14, чтобы позволить плечам 16 присоединяться к направляющей 14 в разных положениях вдоль окружности вокруг окружности направляющей 14. Вращение и опора могут быть облегчены посредством подшипниковых узлов 45 рядом с плечами.
[0035] В некоторых вариантах осуществления, плечи 16 включают в себя датчики 46, расположенные на верхней поверхности 48 плечей 16 между плечами 16 и направляющей 14. Тем не менее, понятно, что в вариантах осуществления, в которых плечи 16 расположены над направляющей (например, относительно пути 18), датчики 46 могут быть расположены на нижней поверхности плечей 16, с тем чтобы датчики 46 располагались между плечами 16 и направляющей 14. Более того, в других вариантах осуществления, датчики 46 могут быть расположены на направляющей 14. Датчики 46 выполнены, чтобы детектировать положение плечей 16 относительно направляющей 14. Другими словами, датчики 46 выполнены, чтобы детектировать положение вдоль окружности плечей 16 вокруг оси 22 направляющей. Например, датчики 46 могут включать в себя датчики на эффекте Холла, емкостные датчики смещения, оптические датчики близости, индуктивные датчики, струнные потенциометры, электромагнитные датчики или любой другой подходящий датчик. В некоторых вариантах осуществления, датчики 46 выполнены, чтобы передавать сигнал, указывающий на положение плеча 16, на систему управления (например, локальную или удаленную). Соответственно, датчики 46 могут использоваться, чтобы регулировать положение плечей 16 вокруг оси 22 направляющей и/или чтобы содействовать зацеплению (или отсоединению) штифтов 40.
[0036] Как упоминалось выше, система 28 приведения в движение может включать в себя систему 50 управления, выполненную, чтобы управлять движением и/или вращением направляющей 14 и/или плечей 16. Система 50 управления включает в себя контроллер 52, содержащий память 54 и один или более процессоров 56. Например, контроллер 52 может являться контроллером автоматизации, который может включать в себя программируемый логический контроллер (PLC). Память 54 является энергонезависимым (не просто сигналом), материальным, машинно-читаемым носителем, который может включать в себя исполняемые команды, которые могут исполняться процессором 56. То есть, память 54 является изделием, выполненным для взаимодействия с процессором 56.
[0037] Контроллер 52 принимает обратную связь с датчиков 46 и/или других датчиков, которые детектируют относительное положение системы 28 приведения в движение вдоль пути 18. Например, контроллер 52 может принимать обратную связь с датчиков 46, указывающую на положение плечей 16, и, следовательно, транспортных средств 12, относительно других плечей 16. На основании обратной связи, контроллер 52 может регулировать работу гоночного средства 10, чтобы имитировать гонку. Например, в проиллюстрированном варианте осуществления, контроллер 52 с возможностью обмена данными присоединен к первому приводу 36, второму приводу 38 и смещающему элементу 42. На основании обратной связи с датчиков 46, контроллер 52 может командовать первому и второму приводам 36, 38 осуществлять вращение направляющей 14 и/или плечей 16, чтобы менять положение транспортных средств 12 относительно друг друга.
[0038] Изменения в компоновке плечей 16 и в механизме для приведения в движение плечей 16 в рабочем направлении 20 также находятся в пределах объема настоящего изобретения. Например, с короткой ссылкой на фиг.5, каждое плечо 16 может быть приведено в движение по отдельности, с тем чтобы происходило по меньшей мере некоторое перекрывание. В таком варианте осуществления, плечи могут быть присоединены в смещенных положениях вдоль шарнира 34, чтобы содействовать такому перекрыванию. Фиг.5 также иллюстрирует вариант осуществления гоночного средства 10 без направляющей 14, но включающего в себя корпус 32 и тележки 33, которые могут быть указаны ссылкой, как система 57 тележек.
[0039] Более того, в некоторых вариантах осуществления, плечи 16 могут не иметь одинаковую длину (например, радиальное протяжение от оси 22 направляющей), или транспортные средства 12 могут быть удалены на разные расстояния вдоль длин, тем самым позволяя плечам 16 перекрываться друг с другом, когда плечи 16 вращаются вокруг оси 22 направляющей, не вызывая контакта транспортных средств 12 друг с другом. Дополнительно, в некоторых вариантах осуществления, плечи 16A и/или 16B могут включать в себя излом, изгиб или искривление вдоль длины плечей 16, с тем чтобы, когда плечи 16 перекрываются, расстояние между корпусом 32 и транспортными средствами 12 снижалось (например, излом, изгиб и/или искривление могут позволить транспортным средствам перекрываться в более компактной конфигурации), как показано на фиг.6. Соответственно, пассажиры могут получать улучшенное развлечение от ощущения того, что транспортные средства 12 могут столкнуться в результате уменьшенного расстояния.
[0040] Теперь, возвращаясь к проиллюстрированному варианту осуществления по фиг.4, контроллер 52 может быть сконфигурирован, чтобы включать в себя виртуальные границы положения и/или электронные стопоры, которые могут блокировать транспортные средства 12 от контакта друг с другом на основании обратной связи, принятой с датчиков 46. В некоторых вариантах осуществления, плечи 16 могут включать в себя блокирующие элементы 58, продолжающиеся из плечей 16 в направлении, поперечном относительно продольной оси плечей 16. Блокирующие элементы 58 выполнены, чтобы действовать в качестве механических стопоров, которые блокируют плечи 16 от сближения до предопределенного расстояния друг от друга. Например, предопределенное расстояние может являться расстоянием, которое блокирует транспортные средства 12 от контакта друг с другом во время работы. Более того, блокирующие элементы 58 могут быть расположены на любом радиальном расстоянии вдоль плечей 16 относительно оси 22 направляющей. Например, в проиллюстрированном варианте осуществления, блокирующие элементы 58 расположены приблизительно на одной четвертой радиального протяжения плечей 16. Тем не менее, в вариантах осуществления, блокирующие элементы 58 могут быть расположены приблизительно на одной третьей радиального протяжения плечей 16, приблизительно на одной второй радиального протяжения плечей 16, приблизительно на трех четвертых радиального протяжения плечей 16, или на любом другом подходящем расстоянии от оси 22 направляющей. В качестве используемого в материалах настоящей заявки, приблизительно указывает ссылкой на плюс или минус пять процентов. Соответственно, блокирующие элементы 58 могут быть выполнены, чтобы блокировать транспортные средства 12 от контакта друг с другом во время работы аттракциона.
[0041] Фиг.7 представляет собой вид сбоку в поперечном разрезе варианта осуществления системы 60 присоединения транспортного средства, выполненной, чтобы присоединять транспортные средства 12 к плечам 16. В проиллюстрированном варианте осуществления, транспортное средство 12 включает в себя корпус 62, присоединенный к шарниру 64 транспортного средства. Шарнир 64 транспортного средства может быть приведен во вращение вокруг оси 66 транспортного средства посредством третьего привода 68. В результате, корпус 62 может быть повернут вокруг оси 66 транспортного средства, тем самым позволяя пользователю поворачиваться вокруг оси 66 транспортного средства во время работы аттракциона. Например, корпус 62 может поворачиваться вокруг оси 66 транспортного средства, когда транспортное средство 12 приближается к повороту или искривленному участку пути 18, тем самым имитируя рулевое управление автомобилем на повороте. Более того, датчик 70 вращения может быть расположен рядом с третьим приводом 68, чтобы определять вращательное положение (например, положение вдоль окружности) корпуса 62 относительно оси 66 транспортного средства. Например, корпус 62 может быть приведен во вращение вокруг оси 66 транспортного средства в первом направлении 24 вращения и втором направлении 26 вращения. Датчик 70 вращения может выводить сигнал на контроллер 52, указывающий на вращение корпуса 62, тем самым позволяя контроллеру 52 выводить сигналы на третий привод 68, чтобы поворачивать корпус 62, чтобы имитировать катание вдоль пути 18.
[0042] В проиллюстрированном варианте осуществления, третий привод 68 присоединен к платформе 72, содержащей ролики 74, расположенные не плече 16. Ролики 74 позволяют платформе 72 и, таким образом, корпусу 62, перемещаться вдоль плеча 16 в первом радиальном направлении 76 и втором радиальном направлении 78. В качестве используемого в материалах настоящей заявки, первое радиальное направление 76 будет указывать ссылкой на движение внутрь и/или в направлении оси 22 направляющей. Более того, второе радиальное направление 78 будет указывать ссылкой на движение наружу и/или вдаль от оси 22 направляющей. Обеспечение движения транспортного средства 12 вдоль плеча 16 делает возможными разные конфигурации движения. Например, это может использоваться, чтобы имитировать иллюзию того, что транспортное средство 12 пытается «обогнать» транспортное средство 12, расположенное непосредственно перед транспортным средством 12, как будет подробно описано ниже. Более того, движение транспортных средств 12 вдоль плеча 16 может позволять транспортным средствам 12 приближаться друг к другу во время работы, тем самым улучшая впечатление, испытываемое пользователем. Дополнительно, плечи 16 могут включать в себя телескопическую конфигурацию, которая обеспечивает возможность движения транспортных средств 12 (например, корпуса 62) в первом и втором радиальных направлениях 76, 78 без использования роликов 74. Плечи 16 могут включать в себя телескопические сегменты, которые могут приводиться в движение приводом или другим подходящим устройством, с тем чтобы транспортные средства 12 могли перемещаться радиально относительно оси 22 направляющей. Например, плечи 16 могут быть выполнены, чтобы удлиняться во втором радиальном направлении 78, с тем чтобы транспортные средства 12 удалялись от оси 22 направляющей, и втягиваться в первом радиальном направлении, с тем чтобы транспортные средства 12 перемещались в направлении оси 22 направляющей. Тем не менее, в некоторых вариантах осуществления, система 28 приведения в движение не включает в себя признаки для перемещения транспортных средств 12 радиально вдоль плечей 16. Например, транспортные средства 12 могут быть жестко или лишь с возможностью вращения присоединены к плечам 16.
[0043] Как показано в проиллюстрированном варианте осуществления по фиг.7, корпус 62 выполнен, чтобы перемещаться вдоль плеча 16 посредством роликов 74. В некоторых вариантах осуществления, ролики 74 могут включать в себя электродвигатель, чтобы перемещать (например, посредством соединения) транспортное средство 12 в первом и втором радиальных направлениях 76, 78. Более того, датчик 80 положения плеча может быть расположен на платформе 72. Датчик 80 положения плеча выполнен, чтобы выводить сигнал, указывающий на радиальное положение транспортного средства 12 вдоль плеча 16. Например, датчик 80 положения может являться емкостным датчиком смещения, который выводит сигнал на контроллер 52. В некоторых вариантах осуществления, движение вдоль плеча 16 может использоваться, чтобы имитировать перемещение транспортного средства 12 в положение для обгона другого транспортного средства 12. Более того, в то время как проиллюстрированный вариант осуществления включает в себя датчик 80 положения плеча на платформе 72, в других вариантах осуществления датчик 16 положения плеча может быть расположен на плече 16.
[0044] В других вариантах осуществления, корпус 62 может быть выполнен, чтобы перемещаться в первом и втором радиальных направлениях 76, 78, используя регулируемую наклонную плиту 81, по плечу 16. Например, фиг.8 представляет собой вид сбоку в поперечном разрезе другого варианта осуществления системы 60 присоединения транспортного средства, которая использует регулируемую наклонную плиту 81 и ролики 74. Как показано в проиллюстрированном варианте осуществления по фиг.8, регулируемая наклонная плита 81 может перемещаться в первом вертикальном направлении 82 и втором вертикальном направлении 83 посредством одного или более приводов 84. Соответственно, вместо использования электродвигателя для перемещения корпуса 62 в первом и втором радиальных направлениях 76, 78, один или более электроприводов 84 могут регулировать положение регулируемой наклонной плиты 81, с тем чтобы корпус 62 перемещался в первом и втором радиальных направлениях 76, 78 под действием гравитационных сил (и центробежных сил), действующих на корпус 62. Такой вариант осуществления может являться желательным, так как пользователи могут испытывать улучшенное впечатление в результате того, что транспортное средство 12 вращается вдоль оси 85 (например, ось 85 определена рабочим направлением 20), и, таким образом, перемещается с дополнительной степенью свободы.
[0045] В некоторых вариантах осуществления, один или более приводов 84 могут быть присоединены к контроллеру 52, который может активировать и/или дезактивировать один или более приводов 84, чтобы перемещать корпус 62 в первом и втором радиальных направлениях 76, 78. Контроллер 52 может принимать обратную связь с датчика 80 положения плеча, чтобы определять положение корпуса 62 вдоль плеча 16 (например, регулируемой наклонной плиты 81), и передавать один или более сигналов на приводы 84, чтобы устанавливать положение корпуса 62 в требуемое местоположение. Как обсуждалось выше, движение корпуса 62 в первом и втором радиальных направлениях 76, 78 может позволять транспортным средствам 12 перемещаться относительно друг друга и создавать ощущение того, что транспортные средства 12 участвуют в гонке друг с другом. Дополнительно, в других вариантах осуществления, регулируемая наклонная плита 81 может быть использована, чтобы регулировать положение направляющей 14, что может позволять плечам 16 перекрываться друг с другом.
[0046] Фиг.9 - схема другого варианта осуществления гоночного средства 10, которое может включать в себя множество регулируемых наклонных плит 81. В проиллюстрированном варианте осуществления по фиг.9, регулируемые наклонные плиты 81 включают в себя поворотные плиты 86, которые могут быть присоединены к плечам 16. В некоторых вариантах осуществления, поворотные плиты 86 могут формировать кольцо вдоль периметра регулируемых наклонных плит 81. Поворотные плиты 86 могут вращаться относительно регулируемых наклонных плит 81, тем самым поворачивая плечи 16 и транспортные средства 12. Чтобы поворачивать поворотные плиты 86, двигатели 87 могут питать приводное устройство 88 (например, шестерни, колеса, шины и/или вращательные приводы), которые могут направлять поворотные плиты 86 в первом направлении 24 вращения и/или втором направлении 26 вращения. Каждая из регулируемых наклонных плит 81 может включать в себя один или более приводов 84, которые могут обеспечить перемещение транспортных средств 12 в первом вертикальном направлении 82 и/или втором вертикальном направлении 83. Соответственно, каждое транспортное средство 12 может вращаться в первом направлении 24 вращения и/или втором направлении 26 вращения независимо от других транспортных средств 12, и каждое транспортное средство 12 может перемещаться в первом вертикальном направлении 82 и/или втором вертикальном направлении 83 независимо от других транспортных средств 12.
[0047] Фиг.10 представляет собой вид сверху варианта осуществления гоночного средства 10, содержащего три транспортных средства, в котором транспортные средства 12 перемещаются вдоль пути 18 в рабочем направлении 20. Как показано, первое транспортное средство 90 находится в положении 92 на первом месте. Находясь в положении 92 на первом месте, первое транспортное средство 90 находится на первом расстоянии 94 относительно подвижной оси 95, которая перпендикулярна пересечению оси 22 направляющей и рабочего направления 20 и продолжается вдоль плоскости, определенной поверхностью 21. В результате, первое транспортное средство 90 может быть описано, как находящееся на «первом месте» относительно второго транспортного средства 96 и третьего транспортного средства 98. Дополнительно, второе транспортное средство 96 находится в положении 100 на втором месте. Находясь в положении 100 на втором месте, второе транспортное средство 96 находится на втором расстоянии 102 относительно подвижной оси 95. Соответственно, второе транспортное средство 96 может быть описано, как находящееся на «втором месте» относительно первого транспортного средства 90 и третьего транспортного средства 98. Кроме того, третье транспортное средство 98 находится в положении 104 на третьем месте. Находясь в положении 104 на третьем месте, третье транспортное средство 98 находится на третьем расстоянии 106 относительно подвижной оси 95. В результате, третье транспортное средство 98 может быть описано, как находящееся на «третьем месте» относительно первого транспортного средства 90 и второго транспортного средства 96. Будет понятно, что соответствующие длины первого, второго и третьего расстояний 94, 102, 106 могут меняться, чтобы соответствовать положениям 92, 100, 104 на первом, втором и третьем местах. Другими словами, первое расстояние 94 соответствует положению 92 на первом месте, второе расстояние 102 соответствует положению 100 на втором месте, а третье расстояние 102 соответствует положению 104 на третьем месте, несмотря на численные значения первого, второго и третьего расстояний 94, 102, 106.
[0048] В проиллюстрированном варианте осуществления, первое транспортное средство 90 находится под первым углом 108 относительно второго транспортного средства 96. Следует понимать, что первый угол 108 может регулироваться посредством первого привода 36 (через соединение плечей 16 с направляющей 14) и/или посредством второго привода 38. Как упоминалось выше, второй привод 38 может являться соединительным приводом, выполненным, чтобы зацеплять соответствующие шестерни плечей 16. В некоторых вариантах осуществления, плечи 16 могут по отдельности вращаться вокруг оси 22 направляющей посредством выборочного зацепления отдельных плечей 16 со вторым приводом 38. В результате, первый угол 108 может регулироваться во время работы аттракциона. Например, первое транспортное средство 90 может находиться под вторым углом 110 относительно третьего транспортного средства 98. Дополнительно, второе транспортное средство 96 может находиться под третьим углом 112 относительно третьего транспортного средства 98. Как будет описано ниже, относительные углы между первым, вторым и третьим транспортными средствами 90, 96, 98 могут регулироваться во время работы аттракциона.
[0049] Как показано на фиг.10, первое транспортное средство 90 расположено в дальнем конце 114 первого плеча 116. Другими словами, ролики 74 могут перемещать платформу 72 во втором радиальном направлении 78, с тем чтобы первое транспортное средство 90 находилось на первом радиальном расстоянии от оси 22 направляющей. Тем не менее, второе транспортное средство 96 располагают приблизительно в средней точке второго плеча 120 посредством перемещения в первом радиальном направлении 76 посредством роликов 74, например. В результате, второе транспортное средство 96 находится на втором радиальном расстоянии 122 от оси 22 направляющей. В проиллюстрированном варианте осуществления, второе радиальное расстояние 122 меньше, чем первое радиальное расстояние 118. Тем не менее, в других вариантах осуществления, первое радиальное расстояние 118 может быть меньше, чем второе радиальное расстояние 122, или первое радиальное расстояние 118 может быть равно второму радиальному расстоянию 122. Более того, в проиллюстрированном варианте осуществления, третье транспортное средство 98 находится на третьем радиальном расстоянии 124 вдоль третьего плеча 125 посредством перемещения в первом радиальном направлении 76. Как показано, третье радиальное расстояние 124 меньше, чем первое радиальное расстояние 118, и больше, чем второе радиальное расстояние 122. Соответственно, радиальное расстояние первого, второго и третьего транспортных средств 90, 96, 98 может регулироваться относительно оси 22 направляющей. В результате, пользователи могут испытывать улучшенное впечатление во время работы, так как транспортные средства 12 выполнены, чтобы перемещаться в разных направлениях относительно оси 22 направляющей.
[0050] Как описано выше, плечи 16 выполнены, чтобы вращаться вокруг оси 22 направляющей, чтобы имитировать гонку между транспортными средствами 12. В проиллюстрированном варианте осуществления, первое транспортное средство 90 и третье транспортное средство 98 расположены с первой стороны 126 пути 18. Кроме того, второе транспортное средство 96 расположено со второй стороны 128. Во время работы аттракциона, транспортные средства 12 могут вращаться вокруг оси 22 направляющей, и, таким образом, перемещаться между первой и второй сторонами 126, 128. В некоторых вариантах осуществления, транспортные средства 12 могут быть по существу выровнены с путем 18. Более того, перемещение с первой стороны 126 на вторую сторону 128 может выполняться посредством второго привода 38 по мере того, как второй привод 38 выборочно осуществляет вращение плечей 16. Тем не менее, в других вариантах осуществления, плечи 16 могут быть заблокированы на направляющей 14 посредством штифта 40, и первый привод 36 может осуществлять вращение направляющей 14 вокруг оси 22 направляющей, и, таким образом, содействовать соответствующему вращению плечей 16 вокруг оси 22 направляющей. Соответственно, транспортные средства 12 могут быть приведены во вращение вокруг оси 22 направляющей, чтобы имитировать движение вдоль гоночного пути во время работы аттракциона.
[0051] Фиг.11 представляет собой вид сверху варианта осуществления гоночного средства 10, в котором первое транспортное средство 90 находится в положении 92 на первом месте, а третье транспортное средство 98 находится в положении 100 на втором месте. Сравнивая положение первого, второго и третьего транспортных средств 90, 96, 98 на фиг.10-11, первое транспортное средство 90 остается в положении 92 на первом месте, но переместилось на вторую сторону 128 пути 18. Кроме того, третье транспортное средство 98 переместилось в положение 100 на втором месте. Дополнительно, второе транспортное средство 96 переместилось в положение 104 на третьем месте. В проиллюстрированном варианте осуществления, вращение направляющей 14 вокруг оси 22 направляющей может приводить транспортные средства 12 во вращение вокруг оси 22 направляющей, с помощью зацепления штифтов 40. Например, как показано на фиг.8 и 9, первое транспортное средство 90 поворачивается вокруг оси 22 направляющей во втором направлении 26 вращения, чтобы переместиться на вторую сторону 128. Более того, первый угол 108 остается по существу неизменным между фиг.8 и 9. Тем не менее, в других вариантах осуществления, второй привод 38 может осуществлять отдельное перемещение плечей 16 вокруг оси 22 направляющей. Другими словами, первый угол 108, второй угол 110 и третий угол 112 могут меняться по мере того, как транспортные средства 12 перемещаются между положением 92 на первом месте, положением 100 на втором месте и положением 104 на третьем месте.
[0052] Более того, по мере того, как транспортные средства 12 перемещаются между положением 92 на первом месте, положением 100 на втором месте и положением 104 на третьем месте, транспортные средства 12 могут вращаться вокруг оси 66 транспортного средства, чтобы ориентировать передний конец 130 транспортных средств 12 вдоль рабочего направления 20. Например, в проиллюстрированном варианте осуществления по фиг.11, путь 18 является по существу прямым, и, в результате, передние концы 130 транспортных средств ориентированы вдоль продолжения пути 18. Тем не менее, в других вариантах осуществления, передний конец 130 может не быть ориентирован вдоль рабочего направления 20. Например, транспортные средства 12 могут быть выполнены, чтобы «выворачиваться» или «дрейфовать» вдоль резкого поворота. Соответственно, вращение транспортных средств 12 может управляться, чтобы направлять передние концы 130 в сторону от рабочего направления 20 (например, в противоположном направлении, в по существу перпендикулярном направлении). Вращение транспортных средств 12 вокруг оси 66 направляющей может улучшить впечатление для пользователей и улучшить разнообразие результатов гонок между транспортными средствами 12.
[0053] Фиг.12 представляет собой вид сверху гоночного средства 10, в котором путь 18 является дугообразным. Как показано, путь 18 включает в себя изгиб или искривление, чтобы имитировать поворот. Так как рабочее направление 20 по существу ориентировано вдоль кривой пути 18, первое транспортное средство 90 и третье транспортное средство 98 приводятся во вращение вокруг соответствующей оси 66 транспортного средства, чтобы направлять передние концы 130 вдоль рабочего направления 20. Тем не менее, как упомянуто выше, второе транспортное средство 96 может находиться в вывернутом положении 132, как показано в проиллюстрированном варианте осуществления по фиг.12. Как показано, поворот вокруг оси 66 транспортного средства второго транспортного средства 96 направляет передний конец 130 в сторону от выравнивания с рабочим направлением 20. Соответственно, пользователи могут испытывать ощущение потери контроля над своим транспортным средством 12 на повороте. В некоторых вариантах осуществления, контроллер 52 может быть выполнен, чтобы направлять вращение второго транспортного средства 96 вокруг оси 22 направляющей к третьему положению 104, чтобы имитировать влияние выворачивания во время гонки с первым и третьим транспортными средствами 90, 98. Другими словами, транспортные средства 12, которые выворачиваются, могут отставать от других транспортных средств 12 в гонке.
[0054] Кроме того, как показано на фиг.12, блокирующие элементы 58 первого транспортного средства 90 и третьего транспортного средства 98 находятся в контакте друг с другом. Как описано выше, блокирующие элементы 58 расположены вдоль плечей 16, чтобы блокировать контакт между транспортными средствами 12, когда транспортные средства 12 вращаются вокруг оси 22 направляющей. Например, блокирующие элементы 58 могут быть расположены на плечах 16, чтобы позволять плечам 16 сближаться на предопределенный угол друг от друга. В некоторых вариантах осуществления, предопределенный угол может обеспечивать возможность вращения транспортных средств 12 вокруг оси 66 транспортного средства без контакта с соседними транспортными средствами 12.
[0055] Фиг.13 представляет собой вид сверху варианта осуществления гоночного средства 10, в котором первая направляющая 134 присоединена ко второй направляющей 136 посредством прикрепляющего элемента 138. В проиллюстрированном варианте осуществления, первая направляющая 134 включает в себя одно транспортное средство 12, и вторая направляющая 136 включает в себя одно транспортное средство 12. Тем не менее, в других вариантах осуществления, первая и вторая направляющие 134, 136 могут включать в себя 2, 3, 4, 5 или любое другое подходящее количество транспортных средств 12. Более того, в других вариантах осуществления, первая и вторая направляющие 134, 136 могут не иметь одинаковое количество транспортных средств 12. Например, первая направляющая 134 может включать в себя два транспортных средства 12, а вторая направляющая 136 включает в себя одно транспортное средство 12. В проиллюстрированном варианте осуществления, прикрепляющий элемент 138 выполнен, чтобы присоединять вторую направляющую 136 к первой направляющей 134, тем самым позволяя пользователям на первой и второй направляющих 134, 136 участвовать в гонке друг с другом. Например, вторая направляющая 136 может быть присоединена к первой направляющей 134 во время работы аттракциона, чтобы имитировать, что вторая направляющая 136 догоняет первую направляющую 134. После этого, транспортные средства 12 соответствующих первой и второй направляющих 134, 136 могут вращаться вокруг соответствующих осей 22 направляющих, как подробно описано выше. Более того, в то время как проиллюстрированный вариант осуществления включает в себя первую и вторую направляющие 134, 136, присоединенные друг к другу, в других вариантах осуществления, первая и вторая системы 35 тележек могут быть присоединены друг к другу во время работы аттракциона посредством прикрепляющего элемента 138.
[0056] Фиг.14 иллюстрирует блок-схему последовательности операций варианта осуществления способа 140 управления гоночным средством 10 во время работы. В блоке 142, множество транспортных средств 12 могут быть направлены в рабочем направлении 120 вдоль пути 18, используя направляющую 14. Дополнительно, в блоке 144, одно или более транспортных средств 12 из множества транспортных средств 12 могут вращаться вокруг оси 22 направляющей, с тем чтобы положение одного или более транспортных средств 12 из множества транспортных средств 12 могло регулироваться относительно оставшихся транспортных средств 12 из множества транспортных средств 12. В некоторых вариантах осуществления, движение транспортных средств 12 в рабочем направлении 120 (например, общее движение) может быть автоматизированным (например, контроллер горки перемещает направляющую 14 вдоль пути 18 на предопределенной скорости). Тем не менее, в некоторых вариантах осуществления, движение транспортных средств 12 вокруг оси 22 направляющей (например, точное движение) может управляться самими пользователями. Соответственно, пользователи, в конечном счете, могут обладать контролем над положением транспортных средств 12 относительно друг друга в конце гонки.
[0057] Дополнительно, начальное положение транспортного средства 12 может быть определено контроллером 52, например. Датчик 46 может передавать сигнал на контроллер 52, указывающий на относительное местоположение вдоль окружности направляющей 14. В некоторых вариантах осуществления, контроллер 52 может определять начальное положение (например, положение 92 на первом месте, положение 100 на втором месте, положение 104 на третьем месте) на основании сигнала с датчика 46. Рабочее направление 20 также может быть определено. Например, датчики, расположенные на направляющей 14, могут определять относительное местоположение направляющей 14 вдоль пути 18, и, таким образом, определять форму пути 18 и рабочее направление 20. Контроллер 52 может передавать сигнал на транспортное средство 12, чтобы поворачивать его вокруг оси 66 транспортного средства. Например, путь 18 может включать в себя искривленную часть, которая регулирует рабочее направление 20. Контроллер 52 может командовать транспортному средству 12 поворачиваться вокруг оси 66 транспортного средства, чтобы выравнивать передний конец 130 транспортного средства 12 с рабочим направлением. Более того, в других вариантах осуществления, контроллер 52 может командовать транспортному средству 12 поворачиваться вокруг оси 66 транспортного средства, чтобы имитировать выворачивание или состояние потери контроля. Дополнительно, требуемое положение транспортного средства 12 может быть предопределено контроллером 52 (например, в отличие от управления самими пользователями). Например, контроллер 52 может определять, что первое транспортное средство 90 финиширует в положении 100 на втором месте. Затем, контроллер 52 может командовать транспортному средству 12 поворачиваться вокруг оси 22 транспортного средства. Например, контроллер 52 может определять, что первое транспортное средство 90 финиширует в положении 100 на втором месте после старта в положении 104 на третьем месте. Контроллер 52 может передавать сигнал на второй привод 38, чтобы осуществлять вращение первого транспортного средства 90 вокруг оси 22 направляющей, чтобы переместить первое транспортное средство 90 в положение 100 на втором месте.
[0058] Как подробно описано выше, система 28 приведение в движение гоночного средства 10 может осуществлять вращательное движение транспортных средств 12 вокруг оси 22 направляющей. Например, второй привод 38 может быть выполнен, чтобы осуществлять вращение плечей 16, присоединенных к транспортным средствам 12. Кроме того, в других вариантах осуществления, плечи 16 могут быть присоединены к направляющей 14, чтобы обеспечивать вращение транспортных средств 12, в то время как направляющая 14 приводится во вращение вокруг оси 22 направляющей. В некоторых вариантах осуществления, транспортные средства 12 выполнены, чтобы вращаться вокруг оси 66 транспортного средства. Вращение вокруг оси 66 транспортного средства обеспечивает возможность выравнивания переднего конца 130 транспортных средств 12 с рабочим направлением 20, тем самым улучшая имитацию катания вдоль пути 18. Более того, вращение вокруг оси 66 транспортного средства может содействовать выворачиванию или дрейфованию на поворотах во время работы аттракциона. В некоторых вариантах осуществления, система 50 управления может быть выполнена, чтобы управлять движением транспортных средств 12 во время работы аттракциона. Например, контроллер 52 может передавать или принимать сигналы, чтобы осуществлять вращение транспортных средств 12 вокруг оси 22 направляющей и/или вокруг оси 66 транспортного средства. Соответственно, гоночное средство 10 может имитировать гонку между транспортными средствами 12, чтобы обеспечивать развлечение для пользователей, использующих аттракцион.
[0059] В то время как лишь некоторые признаки настоящего изобретения были проиллюстрированы и описаны в материалах настоящей заявки, многие модификации и изменения будут приходить на ум специалистам в данной области техники. Поэтому, следует понимать, что прилагаемая формула изобретения охватывает все такие модификации и изменении, которые подпадают под действительную сущность настоящего изобретения.
Устройство и способ стрелочного перевода
Система управления положением
Способ и система камер хранения
Устройство, система и способ формирования изображения
Основанный на движении аттракцион с узлом отображения изображения
Способ и устройство преобразования изображения
Шарнирно соединенная водная горка
Система и способ генерирования волн в различных направлениях
Система и способ для обеспечения визуальных эффектов пляжа аквапарка
Перемещающаяся демонстрационная дверь
Система для передвижного пазл-театра
Системы и способы управления транспортными средствами для катания в ходе игрового процесса
Аттракционная система (варианты), система управления и способ координации движения компонентов парка развлечений (варианты)
Аттракционная система (варианты), система управления и способ координации движения компонентов парка развлечений (варианты)
Пассажирское крепление для развлекательного аттракциона для катания
Аттракцион для катания с транспортными средствами и способ управления изменяемым переключателем аттракциона для катания с транспортными средствами.

