Результат интеллектуальной деятельности: СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ
Вид РИД
Изобретение
ИЗВЕСТНЫЙ УРОВЕНЬ ТЕХНИКИ
Изобретение относится к системам управления положением. В частности, настоящее изобретение относится к системам управления положением транспортных средств на постоянной трассе.
В настоящее время контроль перемещения транспортных средств по трассе, такой как железная дорога или рельсовый путь, осуществляется с помощью центрального пульта управления или компьютера. Компьютер контролирует положение каждого транспортного средства на рельсовом пути и, если расстояние между транспортными средствами находится в пределах заданного минимального расстояния, все транспортные средства на рельсовом пути останавливаются. Такая система помимо компьютера включает в себя множество датчиков, установленных в различных местах на рельсовом пути, и сложную схему разводки проводов для соединения каждого датчика и компьютера.
Например, в патенте США 4864306 описывается система, в которой машиночитаемые путевые маркеры, такие как штрихкодовые маркеры, используются на рельсовом пути и считываются аппаратурой в поезде для обеспечения идентификации номера рельсового пути, идентификации мильных столбов и определения направления движения поезда. В поезде имеется оборудование для обеспечения идентификации поезда и определения скорости поезда. Эта информация передается с помощью ретрансляторов между поездами и на центральную станцию и обрабатывается устройством в соответствующих поездах и в центральном пункте для выдачи визуальных и звуковых сигналов, указывающих на возможное столкновение поездов.
Позже в патенте США 7182298 описана сеть парковых путей, включающая в себя, по меньшей мере, один узел, в котором, по меньшей мере, два путевых участка примыкают друг к другу, и, кроме того, включающая в себя множество транспортных средств, движущихся по сети парковых путей, при этом каждое из них содержит блок управления, с помощью которого может осуществляться управление перемещением указанных транспортных средств, причем информация, относящаяся к последующему или предшествующему транспортному средству, хранится в блоке управления транспортного средства и обновляется при прохождении транспортным средством узла сети парковых путей.
Однако ввиду необходимости использования компьютера, сложной схемы разводки проводов и множества датчиков такая система становится сложной в сопряжении и дорогостоящей в обслуживании. К другим недостаткам относятся требование проверки и подтверждения функциональных возможностей системы после укладки рельсового пути, технические сложности обеспечения взаимной ориентации датчика и мишени транспортного средства и интерфейса относительно рельсового пути, невозможность обнаружения проблемы расстояния между объектами до тех пор, пока она не станет достаточно острой, чтобы нарушить минимальное расстояние между объектами, невозможность изменения критериев расстояния между объектами без добавления дополнительных датчиков, что делает систему менее гибкой, и невозможность учета горизонтального буксования колес и повреждения колес и шин.
Следовательно, на сегодняшний день не существует подходящего способа или системы для управления положением транспортных средств на постоянной трассе.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В одном варианте осуществления настоящего изобретения предлагается способ управления множеством транспортных средств, колеса каждого из которых расположены на постоянной трассе. Данный способ включает в себя: установку процессора на каждое транспортное средство; установку датчика транспортного средства на каждое транспортное средство; использование каждого процессора и каждого датчика транспортного средства для определения фактической скорости каждого транспортного средства при движении каждого транспортного средства по трассе; и использование модуля коррекции управления положением для сравнения фактической скорости каждого транспортного средства с командами управления скоростью каждого транспортного средства с целью определения наличия буксования колес и уменьшения величины команд управления скоростью транспортного средства при возникновении буксования колес.
В другом варианте осуществления изобретения предлагается способ определения буксования, по меньшей мере, одного колеса, по меньшей мере, одного транспортного средства, в котором имеются двигатель и процессор, передающий команды управления скоростью в двигатель для изменения скорости транспортного средства. Данный способ включает в себя: определение фактической скорости транспортного средства через равные промежутки времени; сравнение через равные промежутки времени фактической скорости транспортного средства с ожидаемой скоростью по величине команд управления скоростью с целью определения наличия буксования колес транспортного средства; и уменьшение величины команд управления скоростью с целью приближенного выравнивания фактической скорости транспортного средства при наличии буксования колес.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Приведенное ниже подробное описание выполнено со ссылками на прилагаемые чертежи, на которых:
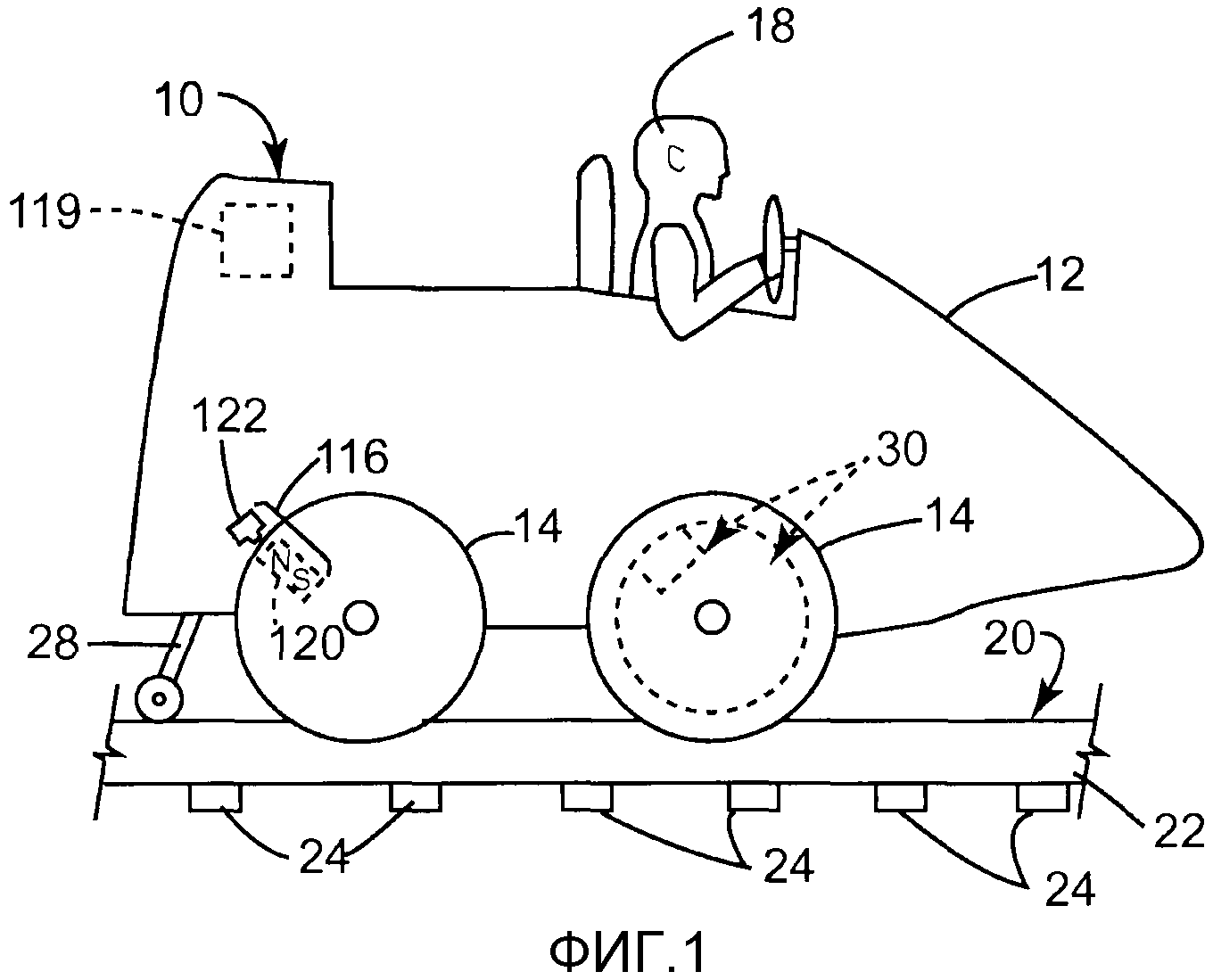
Фиг.1 - схема, на которой показано одно транспортное средство, расположенное на части трассы, и на которой транспортное средство включает в себя систему управления транспортным средством в соответствии с одним вариантом осуществления настоящего изобретения;
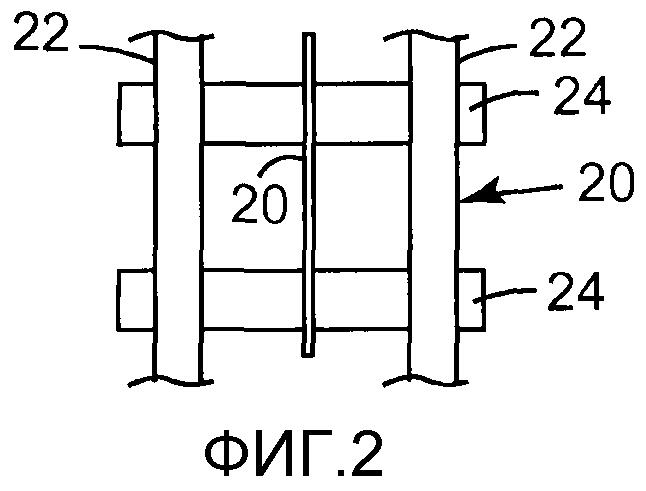
Фиг.2 - схема, на которой показан вид сверху части трассы Фиг.1.;
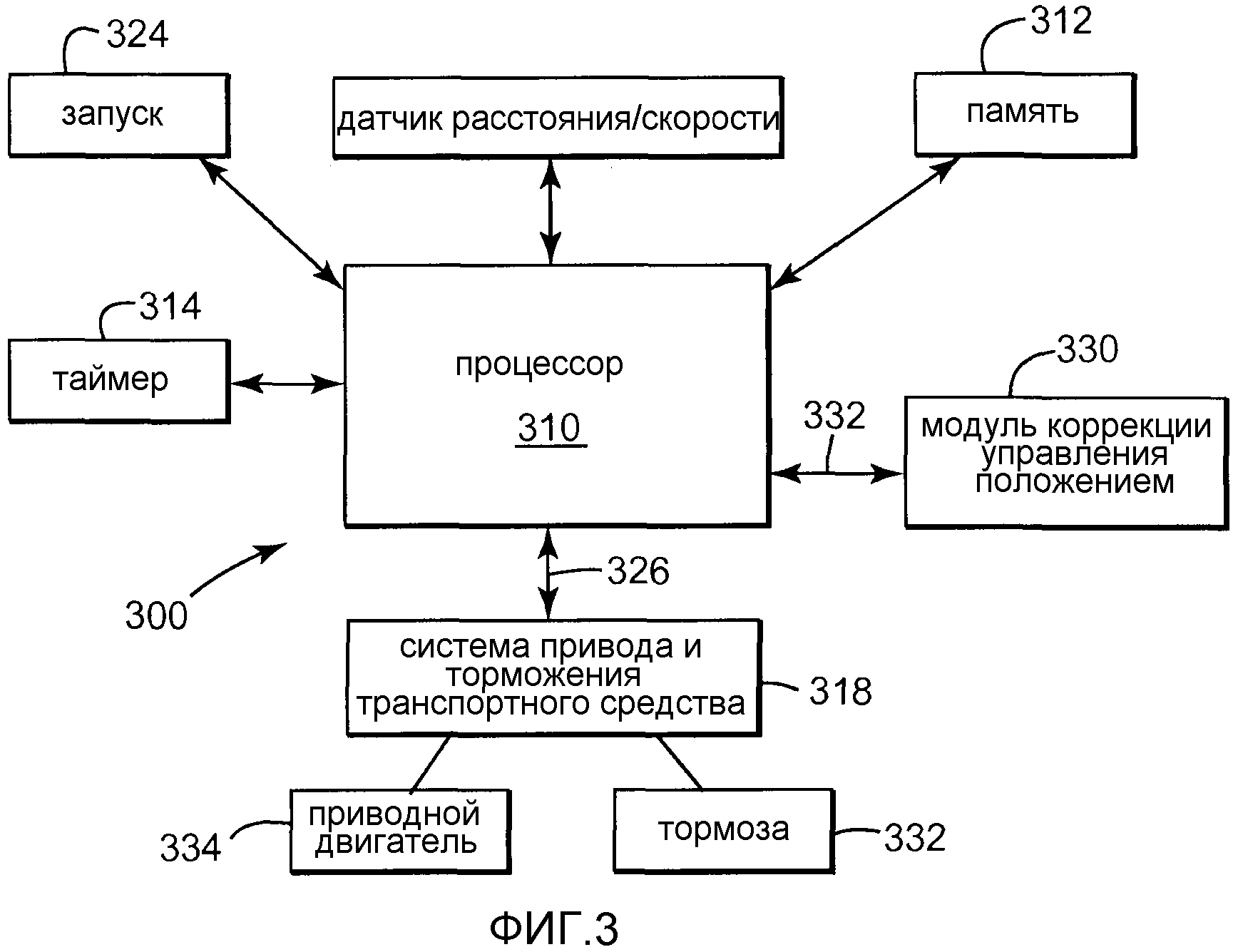
Фиг.3 - блок-схема, на которой показаны детали системы управления транспортным средством Фиг.1;
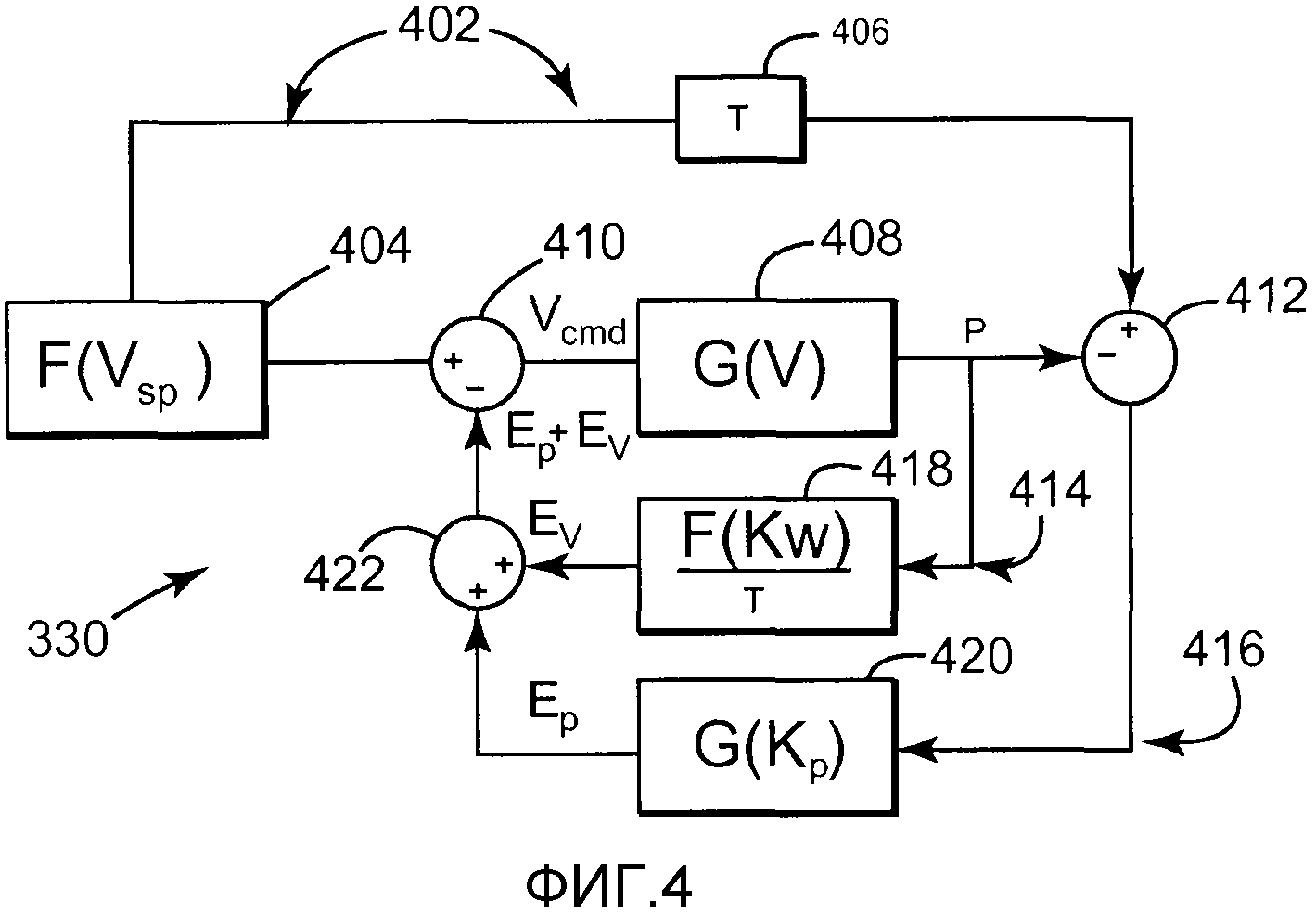
Фиг.4 - структурная схема, на которой показан вариант осуществления модуля коррекции управления положением;
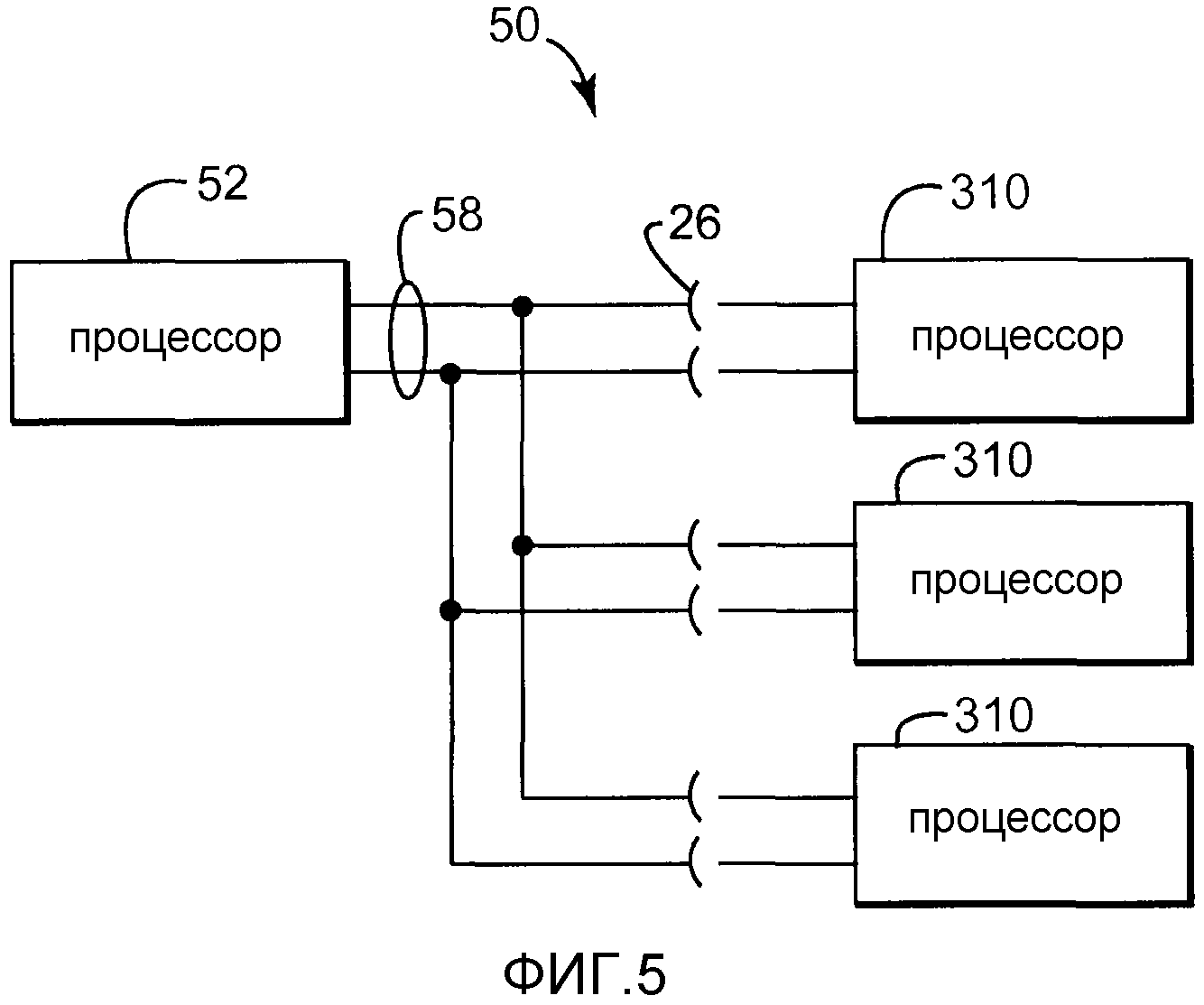
Фиг.5 - схематическое изображение, на котором показана система управления аттракционом; и
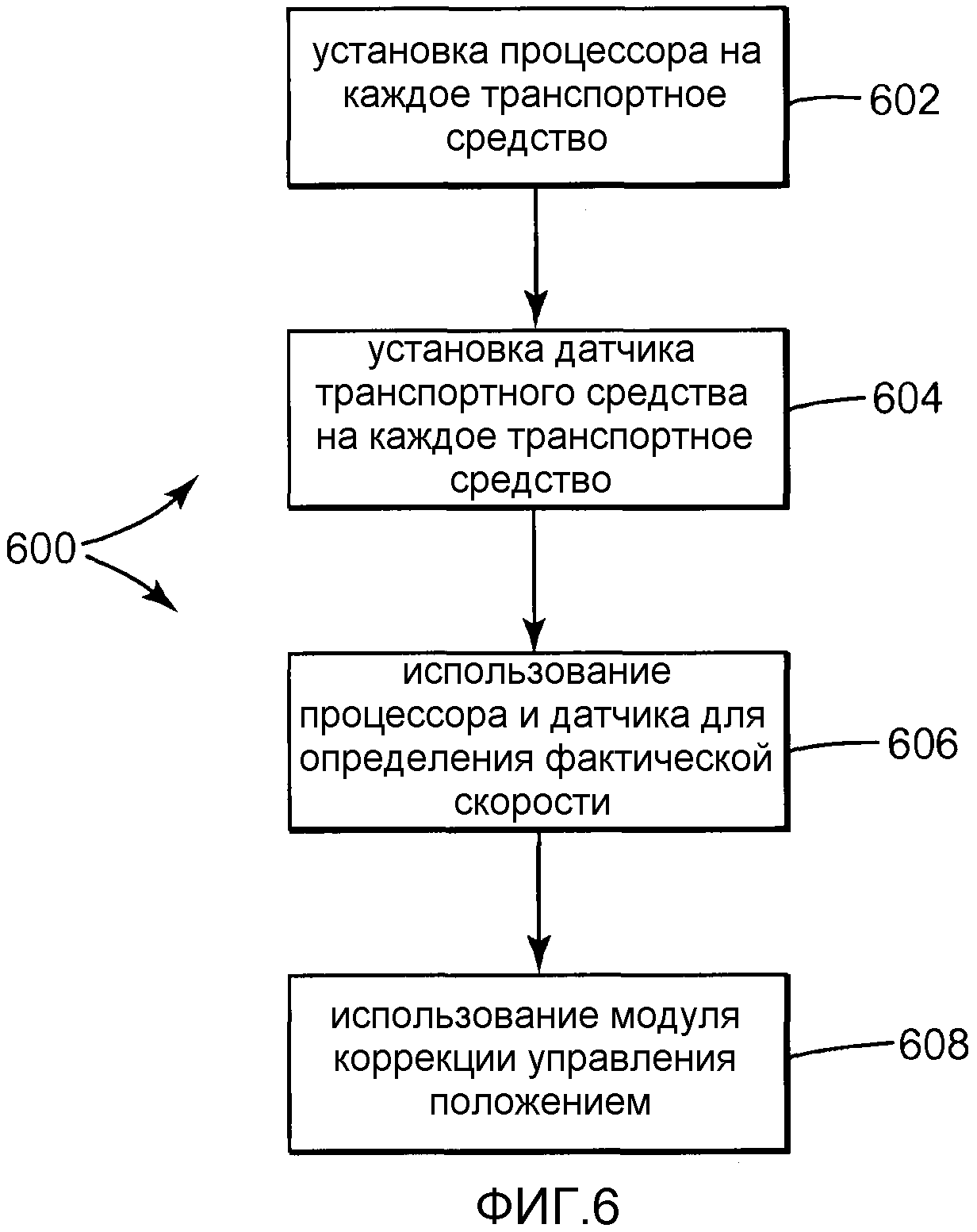
Фиг.6 - структурная схема, на которой описан пошаговый способ в соответствии с одним вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯ
Один вариант осуществления настоящего изобретения касается системы управления и способа управления множеством транспортных средств на постоянной трассе. Один конкретный вариант осуществления системы включает в себя модуль коррекции управления положением для коррекции расстояния между транспортными средствами.
В соответствии с Фиг.1 и 2 одно транспортное средство 10 из множества транспортных средств транспортной системы показано с кузовом 12, колесами 14 и сидящим в нем участником 18. Транспортное средство 10 расположено на трассе, такой как рельсовый путь 20, который содержит рельсы 22, поддерживаемые шпалами 24. Шина или питающий рельс 26 подает электроэнергию от электрического генератора (описанного ниже) в транспортное средство 10 посредством электрода 28. Дисковый тормоз 30 показан установленным на колесо 14.
Датчик расстояния/скорости 116 может содержать магнит 120 и датчик магнитного поля или оптический датчик 122, которые вместе функционируют известным образом для подачи на процессор (не показан) электрических импульсов, соответствующих расстоянию, пройденному колесом 14. Процессор, память, таймер, датчик расстояния и система привода и торможения (каждая из них описана ниже со ссылкой на Фиг.3) могут быть расположены в отсеке 119.
На Фиг.3 общей позицией 300 обозначен один вариант осуществления системы управления транспортным средством для управления множеством транспортных средств на постоянной трассе в соответствии с настоящим изобретением. В данном варианте осуществления система управления 300 содержит процессор 310, память 312, таймер 314, датчик расстояния/скорости 316 и систему привода и торможения транспортного средства 318.
Процессором 310 может быть любой подходящий процессор, такой как программируемый логический контроллер. Память 312 может использоваться любого подходящего типа, включая в качестве неограничивающих примеров оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), электрически перепрограммируемое постоянное запоминающее устройство (EPROM) и флэш-память. Память 312 может хранить программу для процессора 310 и хранить таблицу преобразования для ряда упрежденных положений с учетом продолжительности перемещения транспортного средства по рельсовому пути. Память может быть также выполнена с возможностью хранения результата измерения диаметра колеса, результатов измерений горизонтального буксования колес и результата измерения расстояния между транспортными средствами, например расстояния до каждого транспортного средства от соответствующего транспортного средства в какой-либо определенный момент времени.
Таймер 314 выполняет функцию расчета времени, которая может использоваться процессором 310 для определения фактической продолжительности перемещения транспортного средства по рельсовому пути.
Датчик расстояния/скорости 316 может содержать магнит и датчик магнитного поля или оптический датчик 122, которые вместе функционируют известным образом для подачи на процессор 310 электрических импульсов, соответствующих пройденному колесом расстоянию. В некоторых случаях могут использоваться другие датчики, такие как многовитковый кодовый датчик. Для определения расстояния импульсы могут отсчитываться или непосредственно измеряться процессором 310 с целью определения расстояния, а по нему - положения транспортного средства на рельсовом пути.
Система привода и торможения транспортного средства 318 может быть связана с приводным двигателем 334, содержащим контроллер двигателя (не показан) и тормоз 332, такой как дисковый тормоз 30 (Фиг.1). Приводной двигатель 334 может быть подключен для привода одного или более колес 14 (Фиг.1) с помощью команд управления скоростью, формируемых процессором 310 и передаваемых на контроллер двигателя известным способом. Понятно, что в описанных здесь целях чем больше величина команды управления скоростью, тем больше скорость транспортного средства.
Процессор 310 выполнен с возможностью приема с индикатора пуска 324 через любое подходящее средство, такое как программное обеспечение или программно-аппаратное обеспечение, начального сигнала, указывающего на начало перемещения транспортного средства по рельсовому пути, а затем непрерывно или через равные промежутки времени вычисления фактического положения транспортного средства на рельсовом пути. В некоторых случаях на рельсовом пути могут быть расположены ретрансляторы (не показаны) и может быть предусмотрен датчик для установления фактического местоположения транспортного средства.
Расчетное фактическое местоположение может использоваться процессором 310 для управления с помощью системы привода и торможения транспортного средства 318 расстоянием между множеством транспортных средств таким образом, чтобы транспортные средства сохраняли заданное расстояние друг от друга. Однако во время функционирования могут накапливаться погрешности в определении местоположения, например, из-за износа или буксования колес транспортного средства. Например, по мере увеличения срока службы транспортного средства шины могут начать изнашиваться и становиться меньше, при этом погрешности в определении скорости и местоположения могут накапливаться. Кроме того, когда транспортные средства трогаются с места или срезают углы, может возникнуть буксование колес, вызывающее дополнительные погрешности в определении скорости и местоположения. Для снижения этих погрешностей предусмотрен модуль коррекции управления положением 330, который может быть выполнен с возможностью приема команд управления скоростью от процессора 310 и возвращения на процессор сигнала, корректирующего команды управления скоростью исходя из погрешностей в определении скорости и местоположения. В соответствии с этим в предпочтительном варианте осуществления модуль коррекции управления положением 330 уменьшает колебание заданного расстояния между транспортными средствами для снижения риска нежелательных столкновений транспортных средств.
Для компенсации износа шин модуль коррекции управления положением 330, функционирующий вместе с процессором 310, может быть выполнен с возможностью вычисления расстояния между реперными точками, например, облучаемыми ретрансляторами, которые расположены вдоль трассы и идентифицируются дополнительными датчиками местоположения транспортных средств, а затем сравнения этого значения с известным числом оборотов колеса, измеренных, например, датчиком 116. Текущий диаметр колеса может быть вычислен, а затем применен для коррекции измеренной скорости и ускорения.
Как правило, для компенсации буксования колес, например, при разгоне, модуль коррекции управления положением 330 может сравнивать описанную выше команду управления скоростью (VN) с фактической скоростью, с которой транспортное средство перемещается по постоянной трассе. При наличии различия между ожидаемой скоростью транспортного средства по результатам выполнения команды управления скоростью и фактической скоростью транспортного средства команда управления скоростью может быть уменьшена по величине настолько, чтобы фактическая скорость устранила буксование и восстановила сцепление силами трения с постоянной трассой. После этого величина команд управления скоростью может быть медленно увеличена для сохранения тем самым сцепления силами трения с постоянной трассой.
На структурной схеме Фиг.4 более подробно показан модуль коррекции управления положением 330 для вычисления корректированных команд управления скоростью. Модуль коррекции управления положением 330 содержит основной контур 402, включающий в себя вычислитель 404 для вычисления выровненной переходной скорости (см. ниже), таймер 406, функцию управления скоростью 408, суммирование 410 и суммирование 412. Для вычисления погрешностей в определении скорости и погрешностей в определении местоположения предусмотрены, соответственно, вторичные контуры 414 и 416. В частности, вторичный контур 414 содержит вычислитель для вычисления погрешности в определении скорости (Ev) через F(Kv)/T, а вторичный контур 416 содержит вычислитель для вычисления погрешности в определении положения (Ep) через F(Kp). Для понимания терминов F(Kv) и F(Kp) ниже могут быть даны ссылки. Вторичные контуры 414 и 416 содержат функции усиления 418 и 420 для вычисления и взвешивания погрешностей в определении местоположения и скорости для суммирования 422.
В процессе функционирования и через равные промежутки времени суммирование 422 объединяет вычисленные погрешности в определении скорости и местоположения (Ev), (Ep), которые, в свою очередь, подаются на суммирование 410, которое вычитает значения погрешностей из скорости в определенном измеренном положении (Vsp) для получения скорректированной скорости G(v). Скорректированная скорость G(v) и фактическая скорость (не показана) могут быть выданы в 408 и переданы на процессор 310 (Фиг.3) для использования при определении факта возникновения буксования колеса (колес) 30. При определении процессором 310 возникновения буксования колес процессор может уменьшить величину выдаваемых на двигатель команд управления скоростью для прекращения буксования, а затем начать медленное увеличение величины выдаваемых на приводной двигатель команд управления скоростью, как описано выше.
После этого скорректированная скорость G(v) выдается во вторичный контур 414 для вычисления новой погрешности в определении скорости (Ev) и объединяется с выходом таймера 406 для использования во вторичном контуре 416 с целью вычисления новой погрешности в определении местоположения (Ep). Она также передается в процессор 310 для определения необходимости увеличения скорости для корректировки погрешности в определении местоположения и тем самым расстояния между транспортными средствами.
В некоторых случаях для плавного и медленного увеличения переходных скоростей транспортных средств F(Vsp) и предотвращения нарастания погрешности в системе команды управления скоростью (VN) могут применяться к алгоритму, такому как представленный ниже:
F(Vsp)=Σ[θ=2π,λ π(COS(θ)+1)·[½·(VNnew-VNold)]], где:
θ=θ+λ, где λ=F(a)/π
если VNold≠VNnew, θ=π
VN=команда управления скоростью.
Функция ускорения транспортного средства может быть вычислена по следующему уравнению, причем ускорение ограничивается процентной долей изменения скорости для последующего снижения возможного буксования при разгоне:
F(a)=aN·[(VN-Vactual)/VN]%,
Где Vactual=F(Vsp)(VN)
aN=команда управления ускорением.
Член функции усиления (K) (используемый для вычисления погрешности в определении скорости (Ev) и погрешности в определении местоположения (Ep), см. выше) для скорости Kv и местоположения Kp взвешивает соответствующие члены, чтобы коррекция скорости была плавной. Указанные величины могут быть вычислены следующим образом:
F(Kv,p)=Kv,p·Kv,p·Kwheel ⌀,
Kwheel ⌀=1-[(фактическое-измеренное)/фактическое)]%,
если Ev>>⌀, θ=π, F(a)=F(a)·Kcorrection
На Фиг.5 общей позицией 50 обозначено схематическое изображение, на котором показана система управления движением, применимая в одном варианте осуществления настоящего изобретения. В соответствии с чертежом система управления движением содержит процессор трассы или рельсового пути 52, который находится в цепи с питающем рельсом 26, содержащим ряд соединений участков цепи (не пронумерованы), и множество процессоров 310 (Фиг.3), каждый из которых расположен на транспортном средстве 10 (Фиг.1). Понятно, что в дополнительном варианте осуществления (не показан) процессор рельсового пути 52 может осуществлять обмен данными с каждым процессором транспортного средства 310 скорее с помощью беспроводной связи, чем, например, питающего рельса 26. Процессор рельсового пути 52 может содержать программируемый логический контроллер и контролирует такие функции рельсового пути, как режим путевой машины, функции торможения и трогания с места и управление всеми элементами перевода стрелок с помощью надежных сигналов. Процессор рельсового пути 52 и каждый процессор транспортного средства 310 могут осуществлять обмен данными для обеспечения безопасного управления режимом путевой машины для всех транспортных средств, установленных на рельсовом пути. При наличии рассогласования режима путевой машины или при обнаружении транспортным средством своего выхода за пределы диапазона параметров положения, скорости или ускорения или иных неисправностей транспортное средство осуществляет обмен данными с процессором рельсового пути и/или иными процессорами транспортного средства для осуществления остановки или иной реакции каждого транспортного средства 10.
Процессор рельсового пути 52 может также быть выполнен с возможностью определения и трансляции каждому транспортному средству идеального местоположения каждого транспортного средства на рельсовом пути согласно некоторой заданной схеме, например, размещения всех транспортных средств на рельсовом пути с равными интервалами. Каждое транспортное средство с помощью каждого процессора 310 может после этого синхронизироваться или изменять свое положение на рельсовом пути путем увеличения скорости или торможения, как описано выше, для корректировки своего расстояния до остальных транспортных средств.
На Фиг.6 общей позицией 600 обозначен способ контроля и управления местоположением множества транспортных средств, перемещающихся по рельсовому пути, в соответствии с другим вариантом осуществления настоящего изобретения. Указанный способ управления множеством транспортных средств на постоянной трассе включает в себя установку процессора на каждое транспортное средство, как показано на шаге 602, и установку датчика транспортного средства на каждое транспортное средство, как показано на шаге 604. Данный способ дополнительно включает в себя использование каждого процессора и каждого датчика транспортного средства для определения фактического местоположения каждого транспортного средства при движении каждого транспортного средства по трассе на шаге 606, а на шаге 608 - использование модуля коррекции управления положением для сравнения фактической скорости каждого транспортного средства с командами управления скоростью каждого транспортного средства с целью определения наличия буксования колес и уменьшения величины команд управления скоростью транспортного средства при возникновении буксования колес.
К техническим эффектам описанных здесь систем и способов относится корректировка скорости транспортного средства с учетом буксования колес. К другим техническим эффектам относится корректировка расстояния между транспортными средствами на рельсовом пути.
Несмотря на то, что настоящее изобретение описано применительно к вариантам осуществления, которые в настоящее время считаются наиболее практическими и предпочтительными, следует понимать, что настоящее изобретение не ограничивается данными вариантами осуществления, описанными выше. Напротив, настоящее изобретение предполагает охватить все модификации и эквивалентные конструкции, которые не выходят за пределы существа и объема прилагаемой формулы изобретения.
Устройство и способ стрелочного перевода
Способ и система камер хранения
Устройство, система и способ формирования изображения
Основанный на движении аттракцион с узлом отображения изображения
Способ и устройство преобразования изображения
Шарнирно соединенная водная горка
Система и способ генерирования волн в различных направлениях
Система и способ для обеспечения визуальных эффектов пляжа аквапарка
Перемещающаяся демонстрационная дверь
Улучшенная интерактивность в среде парка развлечений с использованием пассивных отслеживающих элементов
Устройство и способ стрелочного перевода
Способ и система камер хранения
Устройство, система и способ формирования изображения
Основанный на движении аттракцион с узлом отображения изображения
Способ и устройство преобразования изображения
Шарнирно соединенная водная горка
Система и способ генерирования волн в различных направлениях
Система и способ для обеспечения визуальных эффектов пляжа аквапарка
Перемещающаяся демонстрационная дверь
Улучшенная интерактивность в среде парка развлечений с использованием пассивных отслеживающих элементов

