Результат интеллектуальной деятельности: СПОСОБ ФОРМИРОВАНИЯ БАРОИНЕРЦИАЛЬНОЙ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ
Вид РИД
Изобретение
Изобретение относится к области измерительных информационных систем и комплексов боевых самолетов и вертолетов, в котором проводится разработка способа формирования точной абсолютной высоты и вертикальной скорости.
Известен способ оптимального оценивания бароинерциальной высоты и вертикальной скорости, представленный в монографии О.А. Бабича «Обработка информации в навигационных комплексах», Москва, «Машиностроение», 1991 [1] (стр. 395-403).
По своей технической сути указанный способ может быть выбран в качестве наиболее близкого аналога предлагаемого инженерного решения.
Несомненным достоинством прототипа является используемая при его синтезе математическая модель, описывающая характер изменения выходного сигнала баровысотомера (БВ), которая при синтезе комплексной бароинерциальной системы рассматривается, как некое уравнение связи, служащее для получения расчетных выражений для входного сигнала оптимального фильтра-идентификатора и элементов его матрицы наблюдения.
Впервые модель указанного типа была описана в монографии В.А. Боднера «Приборы первичной обработки информации», Москва, «Машиностроение», 1981 [2].
Автор выбранного в качестве прототипа инженерного решения, являясь одним из наиболее признанных специалистов в области теории систем навигации и управления, как при описании прототипа, так и в специальных разделах [1], приводит необходимые для синтеза точного бароинерциального канала сведения по математическому описанию гравитационного ускорения и силы тяжести в проекциях на оси, связанные как с геоцентрической, так и географической системами координат (стр. 159-170) и основанное на их использовании математическое описание вертикального канала инерциальной навигационной системы (ИНС).
В качестве варианта точного расчета нормальной и горизонтальной составляющих вектора гравитационного ускорения в проекциях на оси географического трехгранника (ГСТ) ONHE приведена соответствующая математическая процедура (стр. 168), основанная на использовании аппарата прямоугольных гринвичских и геоцентрических координат.
Однако, при наличии полного, достаточно корректного и математически строгого описания исходной бароинерциальной системы, поставленная на высоком инженерном уровне задача синтеза бароинерциального канала формирования абсолютной высоты и вертикальной скорости, была сведена, по сути, к иллюстративному рассмотрению одного из вариантов решения подобного рода задач.
Формализуя представленное в [1] описание прототипа, акцентируя его изложение на физической сути выполняемых при его реализации операций и процедур, приведем его в следующем виде:
Способ оптимального оценивания бароинерциальной высоты и вертикальной скорости, основанный на комплексной обработке текущей барметрической высоты и выходного сигнала вертикального акселерометра ИНС, осуществляемой в соответствии с традиционной дискретной процедурой оптимальной фильтрации и идентификации Калмана, при реализации которой в качестве входного сигнала фильтра-идентификатора принимают левую часть некоего уравнения, связывающего сформированный по измерениям БВ сигнал с действительной абсолютной высотой полета, наблюдаемой на фоне ее медленно изменяющейся случайной ошибки с известными статистическими характеристиками, а в соответствии с его правой частью и математической моделью комплексной бароинерциальной системы формируют элементы матрицы ее наблюдения, получаемые по результатам оптимального оценивания значения оценок параметров состояния бароинерциального канала используют для формирования текущей абсолютной высоты полета и вертикальной скорости.
Основными недостатками прототипа являются:
- отсутствие алгоритмического учета методических погрешностей измерения вертикального ускорения, обусловленных поворотными ускорениями вида ωξVη-ωηVξ, и гравитационной составляющей ускорения  в функции текущих значений высоты h и географической широты ϕ, относительно которых принято ничем не обоснованное решение их рассмотрения, как известных;
в функции текущих значений высоты h и географической широты ϕ, относительно которых принято ничем не обоснованное решение их рассмотрения, как известных;
- при математическом описании выходного сигнала вертикального акселерометра ИНС, вместо выражения для кажущегося ускорения в проекциях на вертикальную ось реальной ГП ИНС используется соответствующее выражение в проекциях на геодезическую вертикаль;
- при разработке и исследовании характеристик оптимальной процедуры формирования бароинерциальной высоты и вертикальной скорости автор достаточно часто обращается к теореме о конечном значении, что свидетельствует о не корректном проведении анализа динамических характеристик синтезируемого канала (в установившемся режиме его работы) с использованием сделанных по его результатам выводов для принятия не вполне обоснованных инженерных решений;
- неприемлемые для промышленного использования точности формирования выходных сигналов вертикального канала и его динамические характеристики.
Техническим результатом изобретения является разработка высокоточного, пригодного для широкого промышленного применения оптимального способа формирования бароинерциальной высоты и вертикальной скорости на основе параллельного комплексирования баровысотомера из состава системы воздушных сигналов (СВС) и вертикального канала ИНС, функционирующей в режиме полноценной инерциально-доплеровской коррекции.
Указанный технический результат достигается за счет того, что в способе формирования бароинерциальной высоты и вертикальной скорости, основанном на комплексной обработке барометрической высоты и выходного сигнала вертикального канала инерциальной навигационной системы (ИНС), реализуемой в соответствии с дискретной процедурой оптимальной фильтрации и идентификации Калмана, при использовании которой в качестве входного сигнала фильтра-идентификатора принимают левую часть некоего уравнения, связывающего сформированный по измерениям баровысотомера сигнал с действительной абсолютной высотой полета, наблюдаемой на фоне медленно изменяющейся ошибки вида цветного шума первого порядка с ненулевым математическим ожиданием и известными статистическими характеристиками, а в соответствии с его правой частью и математической моделью комплексной бароинерциальной системы, формируют элементы матрицы ее наблюдения, при этом, получаемые по результатам оптимального оценивания значения оценок параметров бароинерциального канала используют для формирования текущей абсолютной высоты полета и вертикальной скорости, дополнительно, при формировании абсолютной высоты и вертикальной скорости осуществляют параллельное интегрирование измеряемого вертикальным акселерометром ИНС сигнала кажущегося ускорения и входящей в него методической составляющей, обусловленной соответствующими компонентами поворотного ωξVη-ωηVξ и гравитационного  ускорений, формируемых по результатам автономного инерциального счисления, сравнением результатов проводимого интегрирования обеспечивают грубое формирование вертикальной скорости Vz, текущее значение которой используют в двухоперационной процедуре расчета ее точного значения Vζ, для чего, параллельно с оптимальным оцениванием бароинерциальных параметров h, ΔVz', Δh, Δaz, организуют процедуру оптимального оценивания и расчета чисто инерциальных параметров Δϕ, ΔVx, ΔVy, αх, αу, εx, εу в режиме полноценной инерциально-доплеровской коррекции, при реализации которой традиционную модель ошибок ИНС расширяют, включая в нее систему трех взаимосвязанных дифференциальных уравнений первого порядка, описывающих характер изменения координат Δξ, Δη, Δζ местоположения ИНС относительно ДИСС в проекциях на оси опорного трехгранника ГП ИНС Oξηζ, а при формировании сигналов измерения и матрицы наблюдения используют кинематические соотношения связи ошибок Δψг, Δυ, Δγ измерения углов эволюции объекта и ошибок Δϕ, Δλ, Δχ счисления основной тройки навигационных параметров с малыми углами αх, αу, αz рассогласования реального и опорного трехгранников ГП ИНС, при этом, получаемые по результатам инерциально-доплеровского оценивания значения оценок
ускорений, формируемых по результатам автономного инерциального счисления, сравнением результатов проводимого интегрирования обеспечивают грубое формирование вертикальной скорости Vz, текущее значение которой используют в двухоперационной процедуре расчета ее точного значения Vζ, для чего, параллельно с оптимальным оцениванием бароинерциальных параметров h, ΔVz', Δh, Δaz, организуют процедуру оптимального оценивания и расчета чисто инерциальных параметров Δϕ, ΔVx, ΔVy, αх, αу, εx, εу в режиме полноценной инерциально-доплеровской коррекции, при реализации которой традиционную модель ошибок ИНС расширяют, включая в нее систему трех взаимосвязанных дифференциальных уравнений первого порядка, описывающих характер изменения координат Δξ, Δη, Δζ местоположения ИНС относительно ДИСС в проекциях на оси опорного трехгранника ГП ИНС Oξηζ, а при формировании сигналов измерения и матрицы наблюдения используют кинематические соотношения связи ошибок Δψг, Δυ, Δγ измерения углов эволюции объекта и ошибок Δϕ, Δλ, Δχ счисления основной тройки навигационных параметров с малыми углами αх, αу, αz рассогласования реального и опорного трехгранников ГП ИНС, при этом, получаемые по результатам инерциально-доплеровского оценивания значения оценок  используют при численном интегрировании дифференциального уравнения, определяющего инерциальную составляющую оценки
используют при численном интегрировании дифференциального уравнения, определяющего инерциальную составляющую оценки  ошибки расчета вертикальной скорости, на основе которой и текущих значений оценок
ошибки расчета вертикальной скорости, на основе которой и текущих значений оценок  погрешностей выдерживания вертикали ИНС, формируют оценку вертикальной скорости
погрешностей выдерживания вертикали ИНС, формируют оценку вертикальной скорости  объекта, которую, в качестве известного управления, используют в процедуре бароинерциального оценивания, в процессе которого получают оценки
объекта, которую, в качестве известного управления, используют в процедуре бароинерциального оценивания, в процессе которого получают оценки  текущей абсолютной высоты h, ее медленно изменяющейся ошибки
текущей абсолютной высоты h, ее медленно изменяющейся ошибки  смещения нуля вертикального акселерометра
смещения нуля вертикального акселерометра  и бароинерциальной составляющей оценки
и бароинерциальной составляющей оценки  ошибки определения вертикальной скорости Vζ, используя которые, посредством сравнения оценки
ошибки определения вертикальной скорости Vζ, используя которые, посредством сравнения оценки  с текущей оценкой
с текущей оценкой  бароинерциальной составляющей ошибки ее определения, формируют скорость Vζ изменения текущей абсолютной высоты полета.
бароинерциальной составляющей ошибки ее определения, формируют скорость Vζ изменения текущей абсолютной высоты полета.
Приведем перечень и описание фигур, которые будут использованы при осуществлении предлагаемого изобретения.
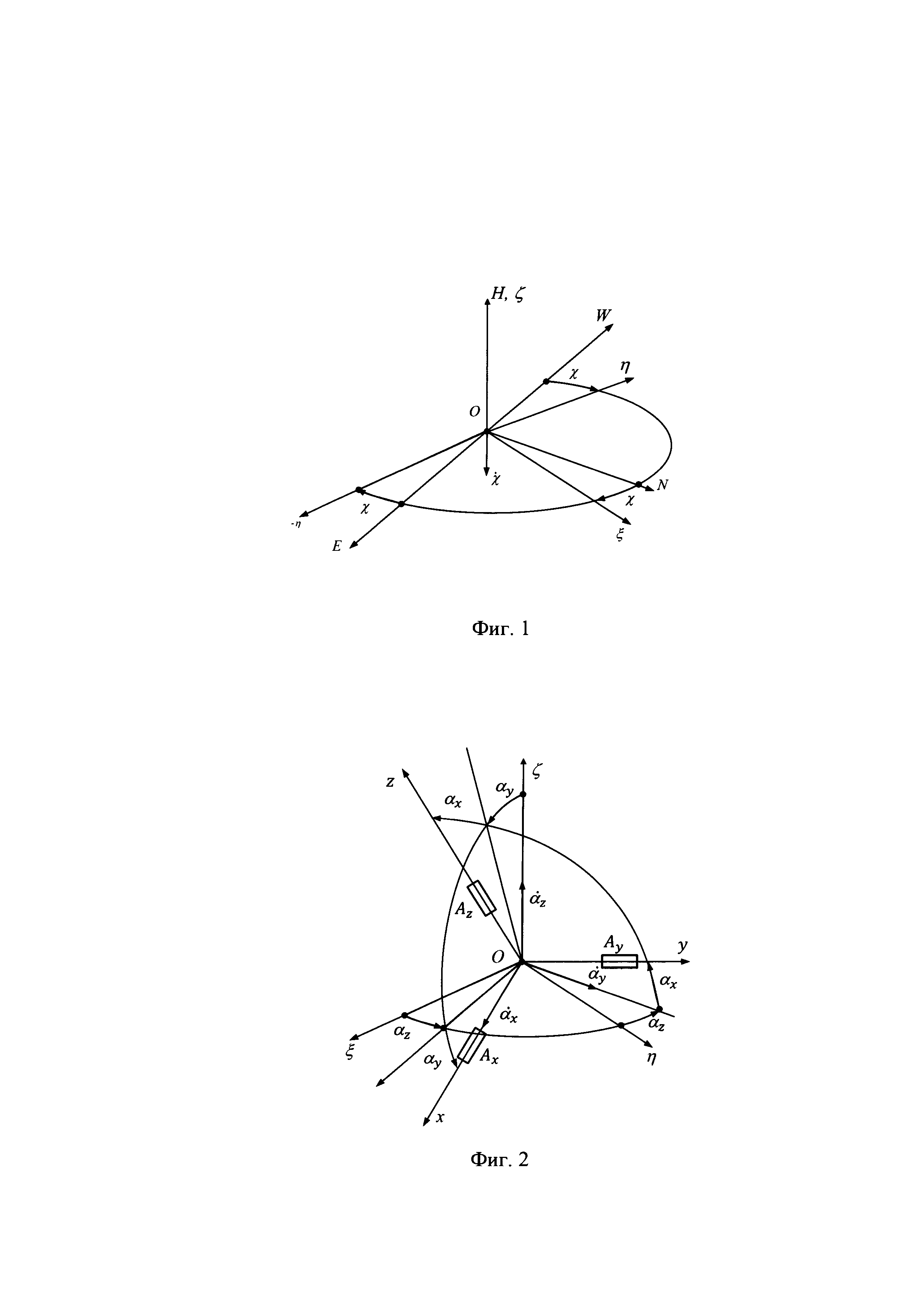
На фиг. 1 приведена взаимная ориентация географического сопровождающего трехгранника (ГСТ) ONHE и опорного трехгранника гироплатформы (ОТГП) ИНС Оξηζ.
Их рассогласование определяется азимутальным углом χ ориентации ОТГП ИНС Оξηζ.
Переход от осей ГСТ ONHE к осям ОТГП ИНС Оξηζ осуществляется посредством поворота на угол χ азимутальной ориентации ОТГП ИНС с угловой скоростью его изменения 
Приведенное на фиг. 1 направление отсчета угла χ и угловой скорости  является положительным.
является положительным.
На фиг. 2 приведена взаимная ориентация ОТГП ИНС Оξηζ и связанной с реальной ГП платформенной системы координат (ПСК) Oxyz.
Их рассогласование определяется углом αz азимутального ухода ГП и малыми углами αу, αх погрешностей выдерживания вертикали, характерных для продольного и бокового каналов ИНС соответственно.
Под малыми следует понимать углы αi (i=х,у,z), для которых, с точностью до величин первого порядка малости относительно αi, справедливы соотношения вида:
sαi=αi, сαi=1,
где под «s» и «с» здесь и далее будем понимать синус и косинус соответствующего угла.
Переход от осей ОТГП Оξηζ, к осям ПСК Oxyz осуществляется посредством трех последовательных поворотов на углы αz, αу, αх с угловыми скоростями  соответственно.
соответственно.
Приведенное на фиг. 2 направление отсчета углов αz, αу, αх и угловых скоростей  является положительным.
является положительным.
На фиг. 3 приведена схема взаимной ориентации векторов геоцентрической  и географической
и географической  вертикалей в точке М земного эллипсоида вращения.
вертикалей в точке М земного эллипсоида вращения.
Углы ϕ' и ϕ, под которыми указанные вертикали пересекают отображение линии экватора, являются, соответственно, углами геоцентрической и географической широты.
Разность ϕ-ϕ' указанных широт равна углу μ между векторам и 
Под приведенным на фиг. 3 вектором  следует понимать вектор угловой скорости суточно-годового вращения Земли
следует понимать вектор угловой скорости суточно-годового вращения Земли 
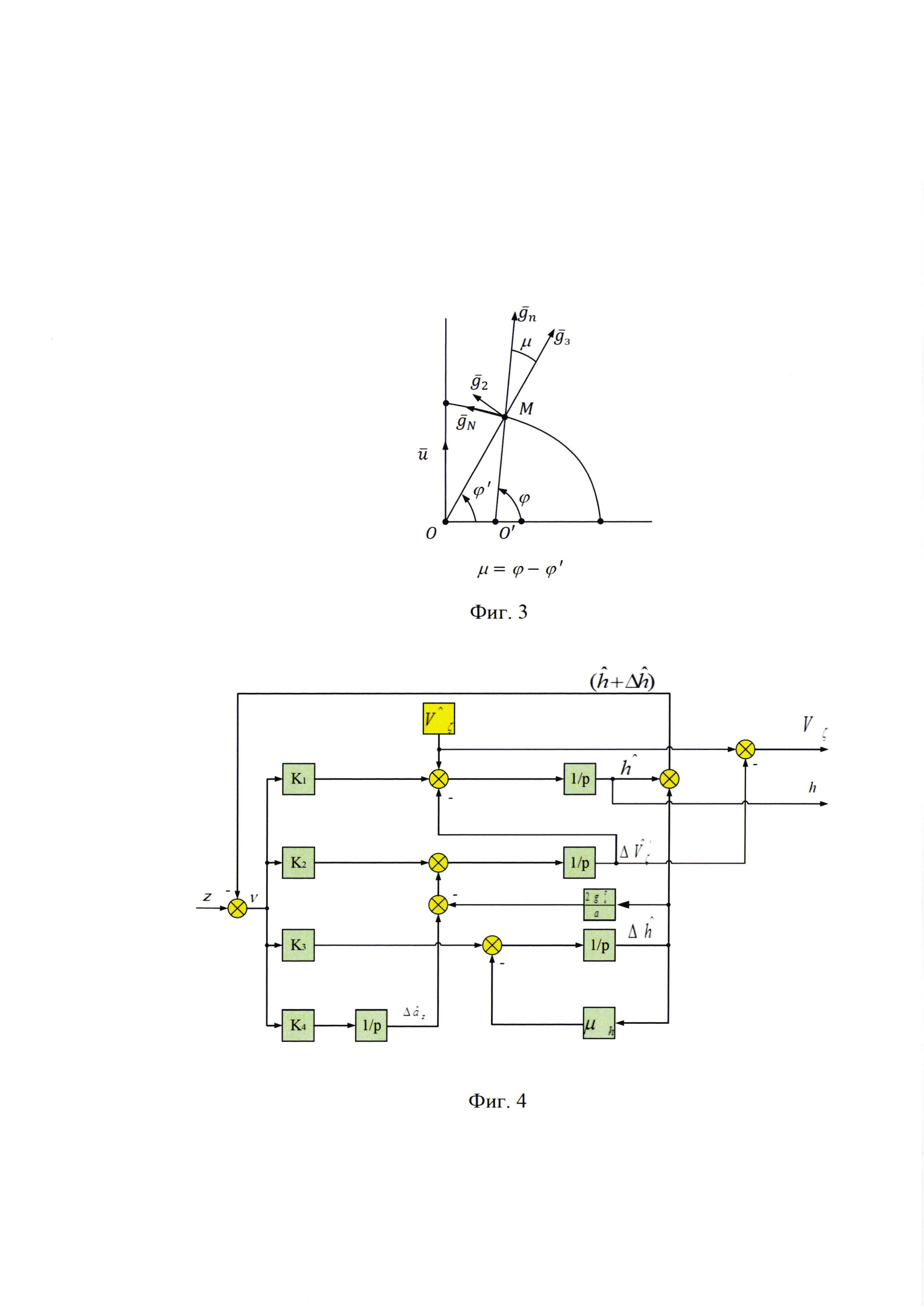
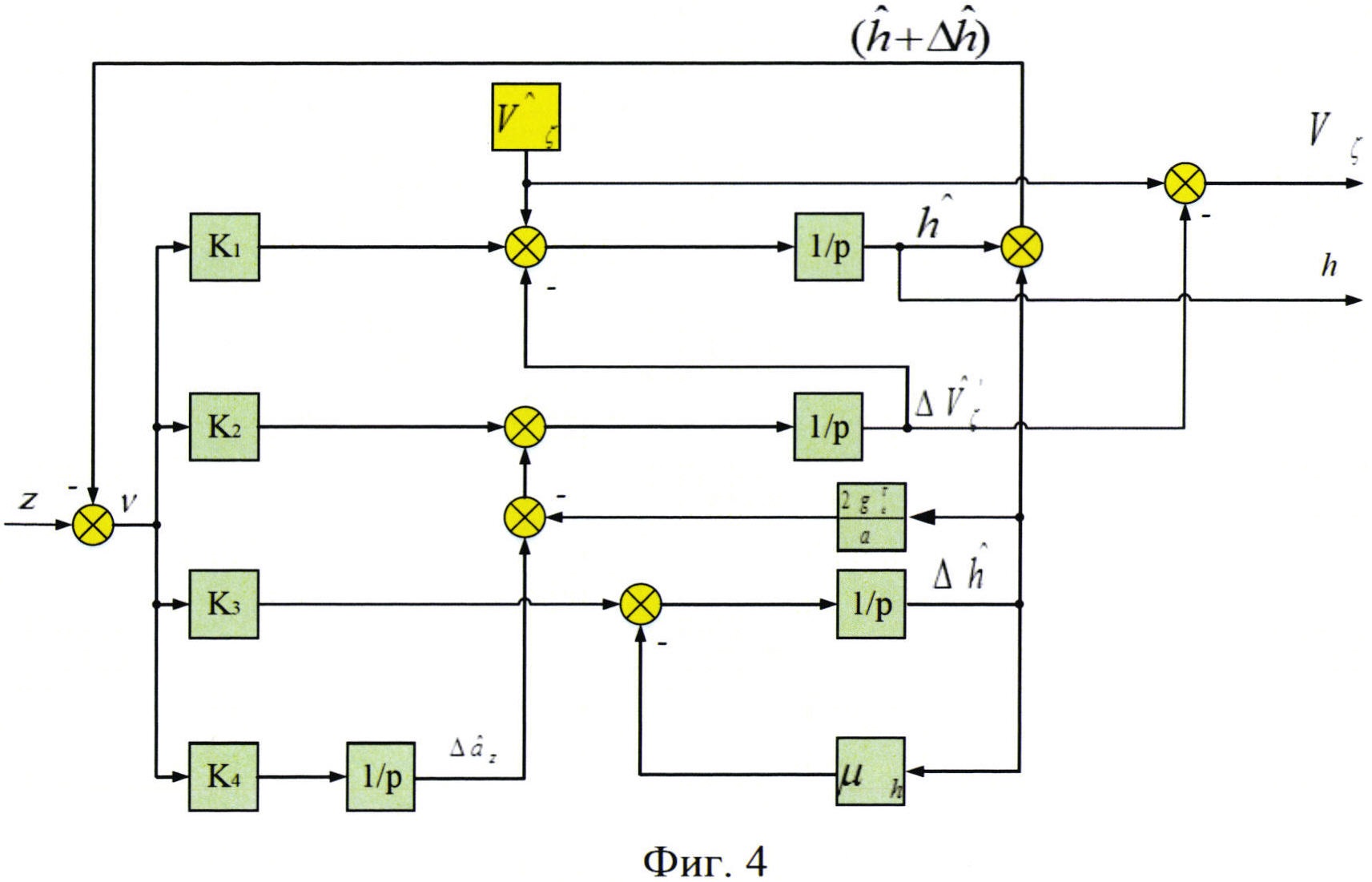
На фиг. 4 приведена структурная схема бароинерциального канала формирования абсолютной высоты и вертикальной скорости.
Указанная структура, не являясь предметом настоящего изобретения, разработана, как пример проведенного ниже синтеза системы дифференциальных уравнений оптимального фильтра-идентификатора (66) в его непрерывном представлении, оценивающего необходимые для формирования абсолютной высоты и вертикальной скорости параметры.
На фиг. 4 используется традиционное, принятое в теории управления, представление интегрирующих, усилительных, суммирующих и сравнивающих звеньев.
Выходные сигналы вертикального канала представлены бароинерциальной высотой h и скоростью ее изменения Vζ.
Для раскрытия физической и математической сути предлагаемого способа формирования бароинерциальной высоты и вертикальной скорости приведем подробное описание используемых при его синтезе математических процедур.
Преобразование компонент произвольного вектора, заданного проекциями на оси ГСТ ONHE, к осям ОТГП ИНС Оξηζ осуществляется в соответствии с векторно-матричным выражением вида (фиг. 1):

где матрица Г, в соответствии с фиг. 1, равна:

При определении компонент произвольного вектора в проекциях на оси, связанные с реальной ГП ИНС Oxyz, по известным его компонентам в осях ОТГП ИНС Оξηζ , будем использовать векторно-матричное выражение вида (фиг. 2):

где матрица R, в соответствии с фиг. 2, учитывая малость углов αх, αу, αz, будет иметь следующий вид:

В обоснование необходимости использования при синтезе точного бароинерциального канала формирования абсолютной высоты и вертикальной скорости оптимальных процедур комплексирования, приведем следующие инженерные соображения.
Определение высоты и вертикальной скорости по измерениям вертикального акселерометра ИНС, как параметров, сформированных каналом без обратной связи, является невозможным, вследствие их постоянно нарастающих ошибок на длительных интервалах работы.
Определение же абсолютной высоты по прямым измерениям баровысотомера и формирование вертикальной скорости путем численного дифференцирования указанных измерений также является неприемлемым, вследствие больших ошибок баровысотомера, вызванных, как запаздыванием давления, что особенно важно, при маневрировании объекта в вертикальной плоскости, так и высокочастотными вибрационными погрешностями баровысотомера.
Таким образом, ни вертикальный акселерометр из состава инерциальной навигационной системы, ни барометрический высотомер, взятые в отдельности, не позволяют удовлетворительно решить поставленную задачу.
При этом, для разработки алгоритма, основанного на комплексной обработке информации, измеряемой вертикальным каналом ИНС и баровысотомером, необходимо располагать адекватными математическими моделями рассматриваемых систем.
Следует отметить, что необходимость в таких моделях неизбежно возникает всякий раз, когда при комплексировании разнородных информационных систем используют дискретные, рекуррентные, ассимптотически сходящиеся процедуры оптимального оценивания, поскольку без них нельзя провести ни синтеза, ни анализа разрабатываемых таким образом алгоритмов.
И чем точнее эти модели описывают реальные физические процессы, характерные для указанных систем в возмущенном режиме их работы, тем более эффективно будет работать алгоритм, синтезированный на основе комплексной обработки их информации.
Таким образом, от достоверности, корректности и полноты математических моделей зависит точность и эффективность функционирования комплексных информационных систем в целом.
Для синтеза точного бароинерциального канала формирования высоты и вертикальной скорости примем предложенную в [1] модель функционирования баровысотомера:

где h - действительная (абсолютная) высота полета;  - текущее значение измеренной баровысотомером (БВ) высоты; Δh - медленно изменяющаяся погрешность, вызванная отклонением давления на высоте h от его стандартного значения; Vh - «белый» шум с представленной ниже интенсивностью; а - постоянная времени БВ, обусловленная тем, что проводка статического давления и корпус датчика БВ имеют конечный объем, который при изменении высоты h полета заполняются воздухом не мгновенно, а в течении конечного времени.
- текущее значение измеренной баровысотомером (БВ) высоты; Δh - медленно изменяющаяся погрешность, вызванная отклонением давления на высоте h от его стандартного значения; Vh - «белый» шум с представленной ниже интенсивностью; а - постоянная времени БВ, обусловленная тем, что проводка статического давления и корпус датчика БВ имеют конечный объем, который при изменении высоты h полета заполняются воздухом не мгновенно, а в течении конечного времени.
Постоянная времени БВ а может быть рассчитана в соответствии со следующей формулой [2]:

где μ - динамическая вязкость воздуха;  - длина трубопровода;
- длина трубопровода;  - показатель адиабаты;
- показатель адиабаты;  - статическое давление на высоте h; d, V - диаметр и объем трубопроводов соответственно.
- статическое давление на высоте h; d, V - диаметр и объем трубопроводов соответственно.
Далее будем считать, что постоянная времени а, вычисляемая в соответствии с (6), известна. Следует отметить, что она зависит от высоты полета и для современных БВ составляет величину от 0,5 сек у поверхности Земли до 12 сек на высоте 30 км.
Приведенную выше модель БВ (5) в дальнейшем будем использовать, как уравнение связи. Для этого представим ее в несколько измененном виде:

На основании приведенного уравнения могут быть сформированы сигнал измерения z и матрица наблюдения оптимального фильтра-идентификатора бароинерциального канала.
Обозначая левую часть указанного уравнения через z, получим выражение для расчета входного сигнала синтезируемого оптимального фильтра-идентификатора:

При этом вид матрицы его наблюдения Н будет определен в соответствии с правой частью рассматриваемого уравнения (7) после уточнения полной модели синтезируемого канала и параметров его состояния.
Необходимо отметить, что сигнал измерения z (8) формируют на основе использования измеренного БВ текущего значения барометрической высоты  Используемое при этом значение производной
Используемое при этом значение производной  определяют методом численного дифференцирования текущего значения высоты
определяют методом численного дифференцирования текущего значения высоты 
Входящий в (8) случайный сигнал Vh в дальнейшем будем трактовать, как некоррелированный гауссовский шум измерения с интенсивностью 
В обеспечение уточнения вида правой части уравнения (7), а также с целью формирования полной структуры оптимального фильтра-идентификатора и определения всех, подлежащих оцениванию параметров вертикального канала, разработаем математическую модель функционирования вертикального акселерометра, установленного на гиростабилизированной платформе ИНС полуаналитического типа с полукорректируемой в азимуте гироплатформой (фиг. 2).
Для этого запишем выражения для составляющих кажущегося ускорения в проекциях на оси опорного трехгранника ГП ИНС Оξηζ, используя основное уравнение инерциальной навигации в форме А.Ю. Ишлинского:
Где  - символ локальной производной в осях подвижной системы координат (ОТГП Оξηζ); Vξ, Vη, ωξ, ωη - горизонтальные составляющие абсолютной линейной и угловой скорости в проекциях на оси ОТГП ИНС Оξηζ; Vζ, uζ - вертикальные составляющие путевой скорости объекта и угловой скорости суточно-годового вращения Земли;
- символ локальной производной в осях подвижной системы координат (ОТГП Оξηζ); Vξ, Vη, ωξ, ωη - горизонтальные составляющие абсолютной линейной и угловой скорости в проекциях на оси ОТГП ИНС Оξηζ; Vζ, uζ - вертикальные составляющие путевой скорости объекта и угловой скорости суточно-годового вращения Земли;  - составляющие гравитационного ускорения в осях ОТГП ИНС Оξηζ.
- составляющие гравитационного ускорения в осях ОТГП ИНС Оξηζ.
Перечисленные выше параметры, входящие в (9), рассчитываются в соответствии со следующими выражениями:
- составляющие VN, VE, VH абсолютной линейной скорости объекта в проекциях на оси ГСТ ONHE:

где  - соответствующие составляющие путевой скорости объекта; u - модуль угловой скорости суточно-годового вращения Земли; uN=ucϕ - северная составляющая угловой скорости вращения Земли; RE - главный радиус кривизны земного эллипсоида вращения Земли; ϕ - географическая широта местоположения объекта.
- соответствующие составляющие путевой скорости объекта; u - модуль угловой скорости суточно-годового вращения Земли; uN=ucϕ - северная составляющая угловой скорости вращения Земли; RE - главный радиус кривизны земного эллипсоида вращения Земли; ϕ - географическая широта местоположения объекта.
- составляющие Vξ, Vη, Vζ абсолютной линейной скорости объекта в проекциях на оси ГСТ Оξηζ:

где χ - истинный курс ОТГП ИНС (фиг. 1).
- составляющие ωξ, ωη, ωζ абсолютной угловой скорости вращения ОТГП ИНС Оξηζ в проекциях на его же оси:

Где  - соответствующие кривизны земного эллипсоида вращения:
- соответствующие кривизны земного эллипсоида вращения:
- главные радиусы RN, RE кривизны земного эллипсоида вращения:

где а, е2 - большая полуось и квадрат первого эксцентриситета земного эллипсоида вращения:
а=6378245 м
b=6356853 м
Приведенные значения большой а и малой b полуосей, а также квадрат первого эксцентриситета е2 соответствуют эллипсоиду Ф.Н. Красовского (1946 г).
- кривизны  земного эллипсоида вращения:
земного эллипсоида вращения:

- составляющие  гравитационного ускорения в осях ОТГП ИНС Оξηζ:
гравитационного ускорения в осях ОТГП ИНС Оξηζ:

При этом процедуру расчета вертикальной составляющей  гравитационного ускорения, ориентированной вдоль вектора географической вертикали рассмотрим отдельно, поскольку точность ее определения имеет исключительно важное значение для синтеза точного вертикального канала.
гравитационного ускорения, ориентированной вдоль вектора географической вертикали рассмотрим отдельно, поскольку точность ее определения имеет исключительно важное значение для синтеза точного вертикального канала.
Для расчета вертикальной составляющей  гравитационного ускорения в проекциях на оси ГСТ ONHE воспользуемся схемой, представленной на фиг. 3.
гравитационного ускорения в проекциях на оси ГСТ ONHE воспользуемся схемой, представленной на фиг. 3.
Из [1] известно, что составляющие  гравитационного ускорения в проекциях на оси геоцентрической системы координат имеют вид (стр. 167-168 [1]):
гравитационного ускорения в проекциях на оси геоцентрической системы координат имеют вид (стр. 167-168 [1]):

Выражения (16) представлены в функции геоцентрической широты ϕ' (фиг. 3), а используемые в них постоянные величины  е2 и q утверждены ГОСТом и равны:
е2 и q утверждены ГОСТом и равны: 
Связь географической ϕ и геоцентрической ϕ' широты, с точностью до величин первого порядка малости относительно такого параметра, как е2, может быть определена выражением вида:

На основании (18), с указанной выше точностью, можно получить выражения для входящих в (16) функций s2ϕ' и s2ϕ':

Подставим (19) в (16). В результате получим следующие выражения для составляющих гравитационного ускорения, но в функции географической широты ϕ:

Если в полученных выражениях ограничиться, как и ранее, величинами первого порядка малости относительно е2 и q, то они примут такой же вид, как и (16):

В соответствии со взаимной ориентацией географической и геоцентрической вертикалей (фиг. 3), учитывая малость угла μ между ними, выражения для нормальной  и горизонтальной
и горизонтальной  (по отношению к геодезической вертикали) составляющих гравитационного ускорения будут иметь вид:
(по отношению к геодезической вертикали) составляющих гравитационного ускорения будут иметь вид:

Далее нас будет интересовать только нормальная составляющая 
Учитывая, что μ=0,5e2s2ϕ, запишем выражение для вертикальной составляющей гравитационного ускорения:
Пренебрегая в приведенном выражении величинами второго порядка малости относительно таких параметров, как е2 и q, получим следующее выражение для искомой составляющей гравитационного ускорения:

Выражения для составляющих Wx, Wy, Wz кажущегося ускорения в проекциях на оси связанной с реальной гироплатформой ИНС системой координат ПСК Oxyz (фиг. 2), в соответствии с векторно-матричным соотношением (3) и видом матрицы R (4), будут иметь следующий вид:

где αх, αу, αz - малые углы рассогласования опорного Оξηζ и реального Oxyz трехгранников ГП ИНС (фиг. 2).
Учитывая, что ни одна из выпускаемых отечественной промышленностью инерциальных систем не выдает непосредственно измеряемый вертикальным акселерометром сигнал, а в качестве выходного сигнала вертикального канала ИНС используют, как правило, интеграл от кажущегося ускорения Wz (24), имеющий характер, либо пилообразного сигнала (без компенсации методических погрешностей измеряемого ускорения), либо гладкий сигнал ошибочно измеренной вертикальной скорости (с компенсацией упомянутой выше методики), представляется целесообразным получить выражение для интеграла от Wz с компенсацией в нем методических погрешностей.
Подставляя (9) в выражение для Wz (24) и интегрируя полученное выражение, получим следующую расширенную запись для интеграла от выходного сигнала вертикального акселерометра ИНС:

Где  - угловые скорости рассогласования осей ОТГП ИНС Оξηζ и связанной с реальной ГП системой координат Oxyz.
- угловые скорости рассогласования осей ОТГП ИНС Оξηζ и связанной с реальной ГП системой координат Oxyz.
Учитывая, что получение выражений для  не является предметом предлагаемого решения, воспользуемся выражениями для них, полученными при выводе модели ошибок ИНС представленного выше типа. Можно показать, что с точностью до величин 1-го порядка малости указанные выражения имеют вид:
не является предметом предлагаемого решения, воспользуемся выражениями для них, полученными при выводе модели ошибок ИНС представленного выше типа. Можно показать, что с точностью до величин 1-го порядка малости указанные выражения имеют вид:

где ΔVx, ΔVy - ошибки в измерении горизонтальных составляющих абсолютной линейной скорости; εх, εу - некомпенсированные уходы горизонтального гироскопа ИНС или иначе, уходы гироскопов его бокового и продольного каналов соответственно.
В выражении (25) первый интеграл определяет реальный уровень методической ошибки вертикальной скорости Vz, которую, как правило, компенсируют по результатам автономного инерциального счисления, реализуемого в ИНС. Выделим указанный интеграл из (25) и представим его в виде:

Действительно, располагая текущей информацией о счисленных значениях координат местоположения объекта и составляющих его абсолютной линейной и угловой скорости, в соответствии с (27), методом дискретного рекуррентного интегрирования формируют методический член Vzм, вычитая который из текущей составляющей скорости (25), получают необходимую для синтеза предлагаемого алгоритмического решения скоростную информацию.
При этом напрямую реализовать указанную процедуру невозможно, поскольку счисленным значениям и координат, и скорости присущи ошибки.
А посему, для описания остаточных погрешностей компенсации методики необходимо найти вариацию от приведенного выше выражения (27) и, очевидно, в чем и заключается суть компенсации, взять его с обратным знаком.
Реализовав указанные операции, получим следующее выражение для оставшегося после компенсации методики члена ΔVzм:

Входящие в приведенное выражение составляющие Δωξ, Δωη, ΔVξ, ΔVη определены при разработке модели ошибок ИНС и имеют следующий вид:


Для вариации вертикальной составляющей  гравитационного ускорения (23) с точностью до величин первого порядка малости правомочно выражение вида:
гравитационного ускорения (23) с точностью до величин первого порядка малости правомочно выражение вида:

Подставляя в (28) выражения (29), (30) и (31), получим следующее промежуточное выражение для ошибки ΔVzм компенсации методики:
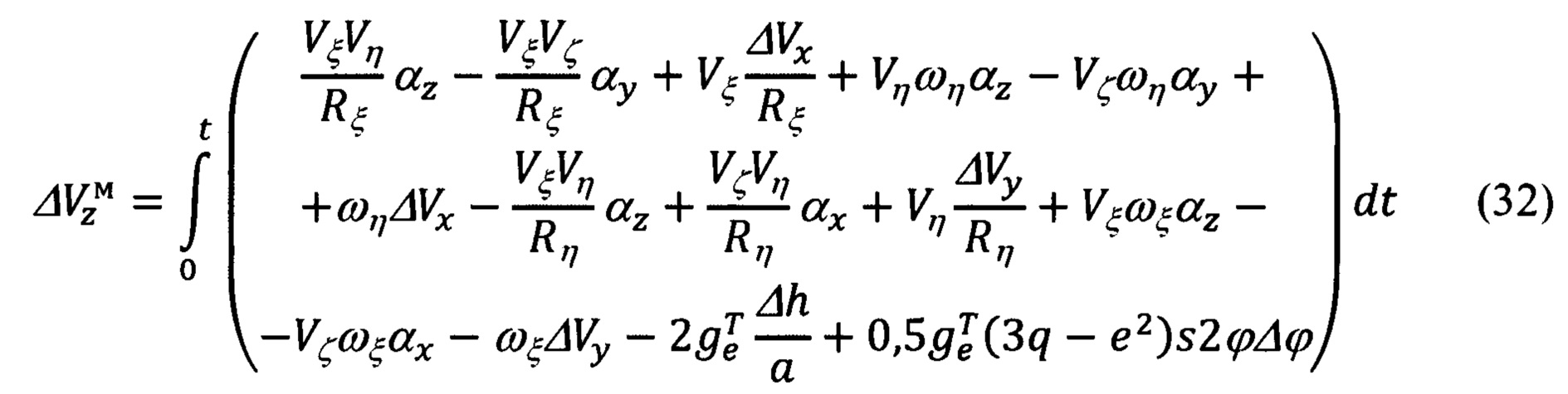
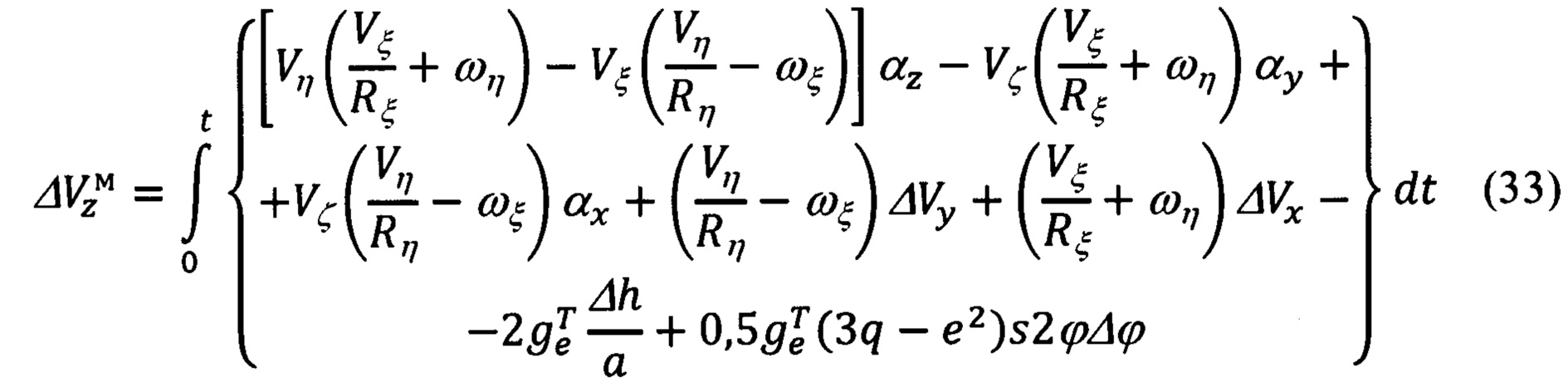
После несложных математических преобразований приведенное выражение примет вид:
Возвращаясь к вертикальной составляющей скорости Vz (25), запишем ее с учетом компенсации методических ошибок (33) и выражений (26) для составляющих  угловой скорости ухода ГП относительно плоскости географического (местного) горизонта:
угловой скорости ухода ГП относительно плоскости географического (местного) горизонта:
После несложных математических преобразований выражение (34) существенно упрощается и принимает вид:
Представляя интеграл от ускорения (35), измеренного вертикальным акселерометром, с учетом текущей компенсации в нем методической погрешности (37), в виде:

и сопоставляя два последних выражения (35) и (36), получим следующее дифференциальное уравнение, описывающее характер изменения введенной в рассмотрение составляющей ΔVz:

где Δaz - нескомпенсированная систематическая составляющая смещения нуля вертикального акселерометра.
При разработке структуры оптимального фильтра-идентификатора бароинерциального канала будем полагать, что в перечень параметров состояния синтезируемой системы входят:
- высота h объекта относительно уровня моря;
- медленно изменяющаяся погрешность Δh изменения абсолютной высоты h, вызванная отклонением давления на указанной высоте от его стандартного значения;
- вертикальная составляющая ошибки ΔVz' расчета вертикальной скорости Vζ (см. ниже);
- нескомпенсированная систематическая составляющая смещения нуля вертикального акселерометра Δaz, описываемая, как постоянная случайная величина с нулевым математическим ожиданием и известной дисперсией 
Учитывая, что в перечень оцениваемых параметров оптимального фильтра-идентификатора бароинерциального канала не входят такие характерные для ИНС параметры, как Δϕ, ΔVx, ΔVy, αх, αу, εх и εу, определяющие характер изменения составляющей ΔVz (37), целесообразно ее представить в виде суммы двух компонент ΔVz' и 

каждая из которых, в соответствии с (37), будет описываться следующими дифференциальными уравнениями:

Первое из приведенных уравнений будет одним из уравнений стохастической системы четвертого порядка, которое входит в структурное ядро оптимального фильтра-идентификатора бароинерциального канала.
Второе уравнение следует рассматривать, как дифференциальное уравнение с известной правой частью, при численном интегрировании которого используют текущие значения оценок  полученных в результате параллельно работающей процедуры оптимального оценивания ошибок ИНС в режиме ее полноценной инерциально-доплеровской коррекции.
полученных в результате параллельно работающей процедуры оптимального оценивания ошибок ИНС в режиме ее полноценной инерциально-доплеровской коррекции.
Сумма двух оценок, а именно,  как одной из четырех оценок вертикального канала, и
как одной из четырех оценок вертикального канала, и  полученной в результате интегрирования второго уравнения системы (39) - это оценки
полученной в результате интегрирования второго уравнения системы (39) - это оценки  суммарной составляющей ошибки ΔVz измерения вертикальной скорости, описываемой дифференциальным уравнением (37).
суммарной составляющей ошибки ΔVz измерения вертикальной скорости, описываемой дифференциальным уравнением (37).
Зная текущее значение оценки  ошибки вертикальной скорости, а также значения оценок
ошибки вертикальной скорости, а также значения оценок  углов отклонения ГП ИНС относительно плоскости горизонта, полученные по результатам оптимального оценивания в параллельно организованной процедуре полноценной инерциально-доплеровской коррекции, в соответствии с выражением (36), может быть рассчитано текущее значение вертикальной скорости:
углов отклонения ГП ИНС относительно плоскости горизонта, полученные по результатам оптимального оценивания в параллельно организованной процедуре полноценной инерциально-доплеровской коррекции, в соответствии с выражением (36), может быть рассчитано текущее значение вертикальной скорости:

Для формирования входящей в (40) составляющей скорости Vz (25) необходимо выполнить три операции, а именно:
- интегрирование вертикальной составляющей Wz (24) кажущегося ускорения, операция выполняется методом численного интегрирования;
- формирование методической составляющей VzМ (27) погрешности определения вертикальной скорости Vz. Операция осуществляется методом численного интегрирования, при этом используются счисленные значения горизонтальных составляющих абсолютной линейной скорости и составляющая  (23) гравитационного ускорения, определяемые с ошибками, описанными выражениями (29), (30), (31);
(23) гравитационного ускорения, определяемые с ошибками, описанными выражениями (29), (30), (31);
- вычисление искомой составляющей вертикальной скорости Vz. Операция выполняется в соответствии с выражением вида:

которое представляет собой разность результатов текущего интегрирования, выполненных под первым и вторым дефисами.
Получаемая при этом составляющая вертикальной скорости Vz математически определяется выражением (35), где характер изменения входящей в него ошибки ΔVz описывается дифференциальным уравнением (37).
Выше был представлен входной сигнал (8) оптимального фильтра-идентификатора бароинерциального канала формирования высоты и вертикальной скорости и описана структура вектора х параметров состояния фильтра.
Формализованно, указанный вектор х имеет следующий вид:

Выше была обоснована необходимость разбиения ошибки ΔVz определения вертикальной скорости на две составляющие ΔVz' и ΔVz'', вторая из которых является расчетной, определяемой по результатам оптимального оценивания ошибок ИНС в режиме инерциально-доплеровской коррекции.
В связи с указанным разбиением представляется целесообразным процедуру формирования вертикальной скорости Vζ осуществлять, выполняя две последовательные операции.
Первая операция предполагает определение некоторой оценки  вертикальной скорости, сформированной исключительно, по результатам оценивания в режиме коррекции от ДИСС.
вертикальной скорости, сформированной исключительно, по результатам оценивания в режиме коррекции от ДИСС.
Расчетное выражение для нее имеет вид:

Где  - оценка ошибки вертикальной скорости, сформированная по результатам интегрирования второго дифференциального уравнения системы (39) на основе упомянутого выше оптимального оценивания ошибок ИНС с использованием оценок
- оценка ошибки вертикальной скорости, сформированная по результатам интегрирования второго дифференциального уравнения системы (39) на основе упомянутого выше оптимального оценивания ошибок ИНС с использованием оценок 
При этом, формирование оценки  в режиме инерциально-доплеровского оценивания осуществляют в соответствии с 1-ым выражением системы (69).
в режиме инерциально-доплеровского оценивания осуществляют в соответствии с 1-ым выражением системы (69).
Выполнение второй операции обеспечивает определение искомой вертикальной скорости Vζ объекта:

По сути, совокупность выражений (43) и (44) адекватна приведенному выше выражению (40).
Обоснованная выше необходимость разбиения ошибки ΔVz определения вертикальной скорости на две составляющие ΔVz' и ΔVz'', ниже будет дополнительно подкреплена как алгоритмической, так и структурной целесообразностью ее осуществления.
Действительно, в самом общем случае модель изменения высоты h над уровнем моря может быть представлена в виде:

Подставляя в уравнение (45) вместо Vζ его значение, определяемое выражением (44), используя при этом вместо  его действительное, подлежащее оцениванию значение
его действительное, подлежащее оцениванию значение  получим новое, более целесообразное представление приведенного уравнения:
получим новое, более целесообразное представление приведенного уравнения:

Если уравнение (46) дополнить дифференциальным уравнением (39), описывающим характер изменения ошибки  то получим взаимосвязанную модель изменения текущей высоты h объекта второго порядка:
то получим взаимосвязанную модель изменения текущей высоты h объекта второго порядка:

которую для полного описания вертикального бароинерциального канала необходимо дополнить моделями медленно изменяющейся ошибки Δh высоты и систематической составляющей Δaz нулевого сигнала вертикального акселерометра.
В соответствии с рекомендациями, представленными в [2] и в монографии Д.А. Браславского «Приборы и датчики ЛА», Москва, «Машиностроение», 1973 [3], погрешность Δh для рассматриваемой комплексной системы формирования параметров вертикального канала может быть описана, как стохастическое дифференциальное уравнение, характерное для цветного шума 1-го порядка с ненулевым математическим ожиданием:

где Wh - «белый» шум единичной интенсивности; σh - среднеквадратическое отклонение, которое зависит от высоты h и может быть апроксимировано зависимостью:

Для современных барометрических систем измерения высоты при h<20 км могут быть приняты следующие значения параметров (48), (49) [1]:

Систематическая составляющая нулевого сигнала вертикального акселерометра традиционно может быть описана, как постоянная случайная величина:

Объединяя приведенные выше уравнения (47), (48), (50), получаем следующую замкнутую модель бароинерциального канала:
где Wv - некоррелированный гауссовский шум интенсивности 
Синтез структуры и алгоритма оптимальной фильтрации и идентификации будем проводить в соответствии с традиционной линейной процедурой оптимального оценивания Калмана. Приведем сводку ее основных соотношений, представленную в Э. Сейдж, Дж. Меле «Теория оценивания и ее применение в связи и управлении», «Связь», Москва, 1976 [3] (стр. 269).
Приведем ее:
1. Исходная модель сообщения:

2. Модель наблюдения:

3. Априорные данные, используемые при синтезе:
4. Структура оптимального фильтра:

5. Вычисление матрицы априорных ошибок оценивания:

6. Вычисление оптимальных коэффициентов усиления:

7. Вычисление матрицы апостериорных ошибок оценивания:

В приведенных выше соотношениях приняты следующие условные обозначения:
хk - вектор параметров состояния системы;
 - вектор оптимальных апостериорных оценок параметров состояния;
- вектор оптимальных апостериорных оценок параметров состояния;
wk - вектор случайных возмущений модели сообщения;
Vk - вектор случайных шумов измерения;
Фk+1,k - фундаментальная матрица системы (модели сообщения);
Гk+1,k - матрица передачи случайных возмущений системы;
Нk - матрица измерения;
 - вектор априорных оценок параметров состояния системы;
- вектор априорных оценок параметров состояния системы;
Рk+1,k - априорная корреляционная матрица ошибок оценивания;
Рk+1 - апостериорная корреляционная матрица ошибок оценивания;
Qk - корреляционная матрица случайных шумов системы;
Rk - корреляционная матрица случайных шумов измерения;
zk - вектор сигналов измерения;
Kk+1 - матрица оптимальных коэффициентов усиления.
В рассматриваемом нами случае вектор параметров состояния, в соответствии с (51), будет равен:

При этом матрица измерения Н, в соответствии с (7), (8) и вектором (59) параметров состояния исходной системы (51), будет равна:

Матрица оптимальных коэффициентов усиления фильтра, в соответствии с приведенным описанием синтезируемой системы, в общем случае, будет иметь следующий вид:

В соответствии с дискретным представлением системы дифференциальных уравнений (51), элементы фундаментальной матрицы Фk+1,k будут равны:

Матрица шумов измерения Rk, в соответствии с (8), будет представлять из себя число, равное:

 -дисперсия некоррелированного гауссовского шума Vh (8).
-дисперсия некоррелированного гауссовского шума Vh (8).
Ковариационная матрица шумов возмущения системы Qk, в соответствии с (51), будет равна:

В приведенных выше выражениях (64), (63), (62) под τ следует понимать дискретность счета решаемой задачи, которую можно принять равной 0,1 сек.
Матрица Гk+1,k передачи возмущений является диагональной матрицей 4-го порядка с элементами, равными τ. Таким образом, несмотря на казалось бы трудоемкую процедуру синтеза рассматриваемой системы, в итоге была получена достаточно простая, математически строгая и физически обоснованная модель функционирования вертикального канала.
Для систематизации приведенного выше описания представляется целесообразным провести синтез структурной схемы оптимального фильтра-идентификатора бароинерциальных параметров вертикального канала, а именно, высоты объекта h над уровнем моря и скорости Vζ изменения.
В обеспечение ее разработки воспользуемся матричным дифференциальным уравнением оптимального фильтра-идентификатора в его непрерывном представлении: 
Все входящие в (65) матрицы состояния системы F, наблюдения Н, оптимальных коэффициентов усиления k, а также вектор  оцениваемых параметров и сигнал измерения z определены выше (51), (60), (61), (59) и (8).
оцениваемых параметров и сигнал измерения z определены выше (51), (60), (61), (59) и (8).
Синтез структуры фильтра будем проводить методом структуризации матричного уравнения (65) с учетом конкретного описания входящих в него сигналов и матриц.
Для этого, на основании (65), (51), (60), (61), приведем систему дифференциальных уравнений, описывающих в непрерывном представлении указанный фильтр-идентификатор:
Структурируя приведенную систему дифференциальных уравнений, используя при этом традиционное начертание интегрирующих, усилительно-передаточных и суммирующих звеньев, получим искомую структуру фильтра-идентификатора параметров вертикального канала (фиг. 4).
Вертикальная составляющая скорости  (43) в процедуре оптимального оценивания (66) используется, как известное управление (см. фиг. 4).
(43) в процедуре оптимального оценивания (66) используется, как известное управление (см. фиг. 4).
Выше, при синтезе точного канала формирования бароинерциальной высоты и вертикальной скорости была обоснована необходимость реализации параллельного комплексирования вертикального канала ИНС и баровысотомера из состава СВС с оптимальным комплексированием инерциальной системы и доплеровского измерителя составляющих путевой скорости.
При этом, для корректного описания и реализации оптимальной процедуры инерциально-доплеровского оценивания и коррекции ИНС традиционную модель ее ошибок расширяют за счет включения в нее математического описания координат ее местоположения относительно ДИСС и представляют его в виде системы трех взаимосвязанных дифференциальных уравнений первого порядка в проекциях на оси ОТГП ИНС Оξηζ вида:

где Δξ, Δη, Δζ, - координаты относительного местоположения ИНС и ДИСС в проекциях на оси ОТГП ИНС Оξηζ;  - составляющие угловой скорости объекта относительно ОТГП ИНС в проекциях на его же оси,
- составляющие угловой скорости объекта относительно ОТГП ИНС в проекциях на его же оси,
чем обеспечивают математически строгое описание комплексной инерциально-доплеровской системы и кардинальное повышение характеристик наблюдаемости, точности и быстродействия ее оптимального идентификатора.
Дополнительно, при формировании входных сигналов оптимального фильтра-идентификатора и матрицы наблюдения используют кинематические соотношения, связывающие ошибки Δυ, Δγ, Δψг измерения углов эволюции объекта и ошибки Δϕ, Δλ, Δχ счисления географических координат его местоположения и угла азимутальной ориентации опорного трехгранника ГП ИНС с малыми углами αх, αу, αz рассогласования реального и опорного трехгранников ГП ИНС вида:

чем обеспечивают математически строгое описание сигналов измерения и матрицы наблюдения и эффективное по точности и быстродействию оценивание и последующий долгосрочный прогноз всех необходимых для формирования оценки  вертикальной скорости (43) параметров состояния инерциальной системы (см. 2-ое уравнение системы (39)).
вертикальной скорости (43) параметров состояния инерциальной системы (см. 2-ое уравнение системы (39)).
Заявляемый способ формирования бароинерциальной высоты и вертикальной скорости реализуется следующим образом:
1. Оптимальное оценивание и формирование бароинерциальной высоты и вертикальной скорости осуществляют на основе совместной обработки барометрической высоты и выходного сигнала вертикального акселерометра ИНС, реализуемой в соответствии с традиционной дискретной процедурой оптимальной фильтрации и идентификации Калмана (52)-(58).
2. В качестве входного сигнала фильтра-идентификатора бароинерциального канала формирования высоты по вертикальной скорости принимают левую часть (8) некоего уравнения (7), связывающего сформированный по измерениям баровысотомера сигнал вида  с действительной абсолютной высотой полета h, при этом, в соответствии с правой частью указанного уравнения (7) и математической моделью комплексной бароинерциальной системы (51), формируют элементы матрицы наблюдения Н (60).
с действительной абсолютной высотой полета h, при этом, в соответствии с правой частью указанного уравнения (7) и математической моделью комплексной бароинерциальной системы (51), формируют элементы матрицы наблюдения Н (60).
3. Текущие значения оценок параметров бароинерциального канала, получаемые по результатам оптимальной фильтрации и идентификации представленного выражением (8) сигнала измерения, используют для формирования его выходных сигналов, процедуру которого реализуют во внешнем контуре, в соответствии с разомкнутой схемой коррекции.
Дополнительно, для достижения заявленного технического результата предлагаемого решения, осуществляют:
4. При разработке математической модели синтезируемого бароинерциального канала формирования абсолютной высоты и вертикальной скорости, учитывая, что в качестве выходного сигнала вертикального канала ИНС используют интеграл от кажущегося ускорения Wz (24), имеющий либо пилообразный характер (без компенсации методических погрешностей измеряемого ускорения), либо гладкий характер ошибочно сформированной вертикальной скорости (с компенсацией упомянутой выше методики), и выбирая второй вариант представления вертикальной скорости, после проведения достаточно трудоемких математических преобразований, представленных выражениями (25)-(35), получают простое выражение для искомой вертикальной скорости Vz (35).
Сопоставляя (35) с его математически адекватным представлением вида (36), получают дифференциальное уравнение для основной ошибки ΔVz определения вертикальной скорости (37).
5. Учитывая, что из всего многообразия параметров, фигурирующих в правой части уравнения (37), в перечень параметров состояния синтезируемого бароинерциального канала формирования высоты и вертикальной скорости входят только медленно изменяющаяся погрешность Δh и нескомпенсированное смещение нуля акселерометра Δaz, составляющую ошибки ΔVz представляют в виде суммы двух составляющих ΔVz' и ΔVz'' (38), первую из которых включают в перечень параметров состояния вертикального канала.
Дифференциальные уравнения, описывающие характер изменения указанных составляющих, в соответствии с уравнением (37), представляют в виде (39).
6. В предлагаемом решении дифференциальное уравнение, описывающее характер изменения составляющей ошибки ΔVz'' (39), с целью алгоритмического учета всех, определяющих ее текущих оценок ошибок инерциальной системы, рассматривают, как уравнение с известной правой частью, при численном интегрировании которого используют текущие значения оценок  ошибок ИНС, полученных в результате параллельно работающей процедуры оптимального оценивания в режиме полноценной инерциально-доплеровской коррекции.
ошибок ИНС, полученных в результате параллельно работающей процедуры оптимального оценивания в режиме полноценной инерциально-доплеровской коррекции.
При этом оценку  ошибки счисления географической широты формируют в соответствии с первым выражением системы кинематических соотношений (69) с использованием текущих значений оценок
ошибки счисления географической широты формируют в соответствии с первым выражением системы кинематических соотношений (69) с использованием текущих значений оценок  погрешностей выдерживания вертикали ИНС и счисленного угла χ азимутальной ориентации опорного трехгранника ее ГП.
погрешностей выдерживания вертикали ИНС и счисленного угла χ азимутальной ориентации опорного трехгранника ее ГП.
7. Формирование вертикальной скорости Vζ объекта, в общем случае, могло бы быть реализовано в соответствии с выражением (40).
Однако, учитывая, что составляющую ошибки ΔVz, в соответствии с предлагаемым алгоритмическим решением, представляют в виде суммы двух компонент ΔVz' (38) и ΔVz'' (39), формирование искомой вертикальной скорости Vζ (40) осуществляют посредством выполнения двух операций, первой из которых определяют оценку  (43), а второй - искомое значение Vζ (44) вертикальной скорости.
(43), а второй - искомое значение Vζ (44) вертикальной скорости.
При синтезе оптимального бароинерциального канала формирования абсолютной высоты h и вертикальной скорости Vζ значение оценки используют, как известное управление (см. 1-ое уравнение системы (51) или (66), фиг. 4).
8. Обосновав необходимость реализации параллельного комплексирования вертикального канала ИНС и баровысотомера из состава СВС с оптимальным комплексирование ИНС и доплеровского измерителя составляющих путевой скорости ДИСС, в обеспечение корректного и математически строгого описания комплексной инерциально-доплеровской системы и повышенных характеристик ее наблюдаемости, точности и быстродействия, традиционную модель ошибок ИНС расширяют за счет включения в нее математического описания координат Δξ, Δη, Δζ ее местоположения относительно ДИСС и представляют его в виде системы трех взаимосвязанных дифференциальных уравнений первого порядка в проекциях на оси ОТГП Оξηζ (67), а при формировании входных сигналов оптимального фильтра-идентификатора и элементов матрицы ее наблюдения используют известные в инерциальной навигации кинематические соотношения (68) и (69), связывающие ошибки измерения углов гироскопического курса Δψг, тангажа Δυ, и крена Δγ объекта и погрешности Δϕ, Δλ, Δχ счисления его географических координат ϕ, λ местоположения и угла χ азимутальной ориентации ОТГП ИНС с малыми углами αх, αу, αz рассогласования реального и опорного трехгранников ГП ИНС (3), (4) (см. фиг. 2).
9. Достоинством разработанного способа формирования абсолютной высоты h и скорости ее изменения Vζ является его инвариантность по отношению к таким составляющим ошибок, как медленно изменяющаяся погрешность Δh, вызванная отклонением давления на высоте h от его стандартного значения и смещения нуля Δaz вертикального акселерометра.
Из представленного описания заявляемого способа формирования абсолютной высоты и вертикальной скорости следует, что суть его раскрыта и технический результат изобретения достигнут.
Способ формирования бароинерциальной высоты и вертикальной скорости, основанный на комплексной обработке барометрической высоты и выходного сигнала вертикального канала инерциальной навигационной системы (ИНС), реализуемой в соответствии с дискретной процедурой оптимальной фильтрации и идентификации Калмана, при использовании которой в качестве входного сигнала фильтра-идентификатора принимают левую часть уравнения, связывающего сформированный по измерениям баровысотомера сигнал с действительной абсолютной высотой полета, наблюдаемой на фоне медленно изменяющейся ошибки вида цветного шума первого порядка с ненулевым математическим ожиданием и известными статистическими характеристиками, а в соответствии с его правой частью и математической моделью комплексной бароинерциальной системы формируют элементы матрицы ее наблюдения, при этом получаемые по результатам оптимального оценивания значения оценок параметров бароинерциального канала используют для формирования текущей абсолютной высоты полета и вертикальной скорости, отличающийся тем, что при формировании абсолютной высоты и вертикальной скорости осуществляют параллельное интегрирование измеряемого вертикальным акселерометром ИНС сигнала кажущегося ускорения и входящей в него методической составляющей, обусловленной соответствующими компонентами поворотного ωV-ωV и гравитационного ускорений, формируемых по результатам автономного инерциального счисления, сравнением результатов проводимого интегрирования обеспечивают грубое формирование вертикальной скорости V, текущее значение которой используют в двухоперационной процедуре расчета ее точного значения V, для чего, параллельно с оптимальным оцениванием бароинерциальных параметров h, ΔV, Δh, Δ организуют процедуру оптимального оценивания и расчета и чисто инерциальных параметров Δϕ, ΔV, ΔV, , , ε, ε в режиме полноценной инерциально-доплеровской коррекции, при реализации которой традиционную модель ошибок ИНС расширяют, включая в нее систему трех взаимосвязанных дифференциальных уравнений первого порядка, описывающих характер изменения координат Δξ, Δη, Δζ местоположения ИНС относительно ДИСС в проекциях на оси опорного трехгранника ГП ИНС Oξηζ, а при формировании сигналов измерения и матрицы наблюдения используют кинематические соотношения связи ошибок Δψ, Δυ, Δγ измерения углов эволюции объекта и ошибок Δϕ, Δλ, Δχ счисления основной тройки навигационных параметров с малыми углами , , рассогласования реального и опорного трехгранников гироплатформы (ГП) ИНС, при этом получаемые по результатам инерциально-доплеровского оценивания значения оценок используют при численном интегрировании дифференциального уравнения, определяющего инерциальную составляющую оценки ошибки расчета вертикальной скорости, на основе которой и текущих значений оценок погрешностей выдерживания вертикали ИНС формируют оценку вертикальной скорости объекта, которую, в качестве известного управления, используют в процедуре бароинерциального оценивания, в процессе которого получают оценки текущей абсолютной высоты h, ее медленно изменяющейся ошибки смещения нуля вертикального акселерометра и бароинерциальной составляющей оценки ошибки определения вертикальной скорости V, используя которые, посредством сравнения оценки с текущей оценкой бароинерциальной составляющей ошибки ее определения, формируют скорость V изменения текущей абсолютной высоты полета.




Способ оптимального оценивания ошибок инерциальной навигационной системы и её коррекции по неподвижному наземному ориентиру с известными географическими координатами
Защищенный способ оптимальной привязки к подвижной наземной цели
Способ формирования воздушно-скоростных параметров маневренного объекта
Комплексная система навигации и управления летательного аппарата
Способ определения скорости ветра на борту летательного аппарата и устройство, его реализующее
Способ управления летательным аппаратом при заходе на посадку
Комплексная система управления траекторией летательного аппарата при заходе на посадку
Многофункциональный тяжелый транспортный вертолет круглосуточного действия, комплекс бортового радиоэлектронного оборудования, используемый на данном вертолете
Способ подготовки инерциальной навигационной системы к полету
Способ управления траекторией летательного аппарата при посадке на незапрограммированный аэродром
Способ управления траекторией посадки летательного аппарата на запрограммированный аэродром
Способ управления траекторией летательного аппарата при заходе на посадку
Комплексная навигационная система летательного аппарата

