Результат интеллектуальной деятельности: СПОСОБ ПОДГОТОВКИ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ К ПОЛЕТУ
Вид РИД
Изобретение
Изобретение относится к области авиационного приборостроения.
Курс, крен, тангаж, скорость и координаты местоположения относятся к основным навигационным параметрам, измеряемым на борту летательных аппаратов (ЛА). На борту современных ЛА для измерения курса, крена, тангажа, скорости и координат местоположения широкое применение нашли инерциальные навигационные системы (ИНС).
Теоретические основы функционирования ИНС и описание некоторых из них приведены во многих работах отечественных и зарубежных авторов. В частности в работах, которые приведены ниже в порядке года издания:
1. Б.С. Петров “Вопросы теории инерциальных навигационных систем”. М.: Наука, 2003.
2. О.А. Бабич "Обработка информации в навигационных комплексах". М.: Машиностроение, 1991.
3. “Аппаратура измерения курса и вертикали на воздушных судах гражданской авиации”. М.: Машиностроение, 1989.
4. И.И. Помыкаев, В.П. Селезнев, Л.А. Дмитроченко “Навигационные приборы и системы”. М.: Машиностроение, 1983.
5. Ф.В. Репников, Г.П. Сачков, А.И. Черноморский “Гироскопические системы”. М.: Машиностроение, 1983.
6. С.С. Ривкин, Р.И. Ивановский, А.В. Костров “Статистическая оптимизация навигационных систем”. Л.: Судостроение, 1976.
7. А. Липтон “Выставка инерциальных систем на подвижном основании”. М.: Наука, 1971.
8. “Инерциальные системы управления” / под редакцией Д. Питмана. М.: Воениздат, 1967.
9. Патент РФ на изобретение №2434202 от 21.07.2010: “Комплексная система подготовки и навигации летательного аппарата”. ОАО “РПКБ”.
ИНС могут быть платформенного или бесплатформенного типа и имеют в своем составе несколько гироскопов и акселерометров. С их помощью в ИНС одновременно измеряют составляющие векторов угловой скорости и ускорения, интегрируя которые, определяют курс, крен, тангаж, скорость и координаты местоположения.
На борту современных ЛА все большее применение находят ИНС бесплатформенного типа.
Современные ИНС, как правило, имеют два основных режима работы - ПОДГОТОВКА и РАБОТА.
В режиме ПОДГОТОВКА осуществляется выставка ИНС в горизонте и азимуте - определяется ориентация измерительных осей ИНС относительно местного горизонта и местного географического меридиана. От качества и точности выставки во многом зависит точность работы ИНС в последующем полете.
Теоретические основы функционирования ИНС при выставке на аэродроме рассмотрены в вышеупомянутых работах [1], [5], [7], [8]. На неподвижном основании сущность автономной выставки ИНС состоит в измерении с помощью акселерометров и гироскопов, входящих в состав ИНС, составляющих вектора ускорения силы тяжести и составляющих вектора угловой скорости вращения Земли по измерительным осям системы и нахождении углов ориентации измерительных осей ИНС относительно плоскости местного горизонта и вектора скорости вращения Земли. Т.е. начальную выставку ИНС на аэродроме осуществляют при неподвижном ЛА путем согласования соответственно векторов ускорения и угловой скорости ЛА, измеряемых ИНС, и известных для стояночных координат местоположения ЛА векторов ускорения силы тяжести G и угловой скорости вращения Земли U.
Такой метод автономной начальной выставки на суше в литературе называют методом гирокомпасирования, который в современных ИНС реализуется в виде режима гирокомпасирования.
Конструкция и технология производства современных ИНС, в частности используемых в их составе гироскопов, акселерометров и вычислительных устройств, обеспечивают достаточный уровень точности начальной выставки в режиме гирокомпасирования при подготовке ЛА к вылету с наземного аэродрома.
Более сложной, по сравнению с выставкой на аэродроме, является выставка ИНС при базировании ЛА на корабле. Процесс выставки ИНС при подготовке ЛА к взлету с палубы корабля усложнен движением корабля. Теоретические основы функционирования ИНС при выставке на подвижном основании рассмотрены в вышеупомянутых работах [7], [1], [5], [6]. Основными методами выставки ИНС современных ЛА, при выставке на корабле, являются модификации рассмотренного в работе А. Липтона [7] метода согласования векторов угловой ориентации, скорости и координат местоположения самого корабля и стоящего на его палубе ЛА, которые измеряются соответственно инерциальными системами корабля и инерциальными системами ЛА.
В ИНС современных ЛА, с учетом особенностей их конструкции, такое согласование осуществляется непосредственно в самой ИНС с использованием возможностей встроенных в системы вычислительных устройств.
Для информационного обеспечения выставки на корабле в ИНС должны быть переданы данные о параметрах движения корабля, измеряемых корабельной ИНС (КИНС):
- углы рысканья, крена и дифферента;
- северная и восточная составляющие вектора скорости по осям географической системы координат;
- географические координаты - широта и долгота.
Для учета различий в положении и движении ЛА и КИНС, которая, как правило, размещается вблизи центра масс корабля, в ИНС также передаются вектор координат ЛА относительно центра масс корабля (X, Y, Z) и угловые скорости изменения углов рысканья, крена и дифферента корабля.
Процедура выставки ИНС как на суше, так и на корабле, как правило, разделена на два этапа:
- грубая выставка - грубое согласование векторов;
- точная выставка - точное согласование векторов.
На этапе грубой выставки в ИНС определяются приблизительные значения параметров угловой ориентации и скорости ЛА. Уже после завершения этого этапа ИНС обладает необходимыми функциональными свойствами по измерению параметров углового положения и скорости ЛА, но ее точностные характеристики будут очень далеки от требуемых для современных ИНС.
Математический аппарат, используемый в ИНС на этапе грубой выставки, описан практически во всех вышеупомянутых книгах.
Основой математического аппарата, обеспечивающего согласование векторов угловой ориентации и скорости на этапе точной выставки ИНС и соответственно достижение требуемых точностных характеристик ИНС, является, как правило, метод оптимальной фильтрации Калмана (ОФК), описанный в упомянутых выше книгах [6] (глава 5) и [2] (глава 1).
Этап грубой выставки позволяет уменьшить погрешности начальной ориентации до величин, позволяющих линеаризовать математическую модель погрешностей ИНС. Поэтому структура ОФК, на этапе точной выставки, как правило, базируется на представлении вектора “состояния системы” в виде системы линейных дифференциальных уравнений, описывающих в математическом виде погрешности ИНС, являющиеся функцией инструментальных погрешностей датчиков ИНС, параметров текущего местоположения ЛА, а при выставке на корабле и параметров его движения. При этом компоненты “вектора измерения погрешностей системы” при выставке на суше формируются как разности соответствующих компонентов векторов угловой скорости и ускорения, измеренных соответствующими датчиками ИНС, и априорно известных для стояночных координат местоположения ЛА компонентов вектора угловой скорости вращения Земли и вектора ускорения силы тяжести, а при выставке на корабле формируются как разности соответствующих компонентов векторов скорости и координат местоположения ЛА и корабля.
После завершения этапа точной выставки ИНС с высокой точностью определяет параметры угловой ориентации, скорость и координаты ЛА.
С учетом цели изобретения, описание наиболее близкого к предлагаемому изобретению способа (прототип) приведено в описании устройства по патенту РФ на изобретение №2434202 [9].
В устройстве по патенту №2434202 осуществляется начальная выставка ИНС как при подготовке к вылету ЛА с наземного аэродрома, так и при подготовке к вылету ЛА с авианесущего корабля.
При подготовке к вылету ЛА с наземного аэродрома начальная выставка ИНС осуществляется в режиме гирокомпасирования путем согласования измеренных в ИНС векторов ускорения и угловой скорости с априорно известными векторами ускорения силы тяжести и угловой скорости вращения Земли в точке местоположения ЛА. Координаты начального местоположения ЛА извлекаются из бортовых устройств долговременной памяти или вводятся с соответствующих пультов.
При подготовке к вылету ЛА с корабля начальная выставка ИНС осуществляется путем согласования измеренных в ИНС векторов углового положения, скорости и координат ЛА с векторами углового положения, скорости и координат корабля, измеренными КИНС. При этом в процессе согласования указанных векторов учитываются текущие значения векторов ускорения силы тяжести и скорости вращения Земли в точке местоположения корабля и параметры положения и движения ЛА относительно центра масс корабля.
Процедуры согласования соответствующих векторов при начальной выставке ИНС, как на суше, так и на корабле, подробно описаны в вышеуказанной литературе и сами по себе не являются предметом предлагаемого изобретения.
Таким образом, с учетом только существенных для предлагаемого изобретения признаков в способе-прототипе при подготовке к взлету ЛА с наземного аэродрома начальную выставку ИНС осуществляют при неподвижном ЛА в режиме гирокомпасирования, а при подготовке ЛА к взлету с корабля начальную выставку ИНС осуществляют в режиме выставки на корабле путем согласования в ИНС, с учетом положения и движения ЛА относительно центра масс корабля, соответственно векторов угловой ориентации, скорости и координат ЛА, измеренных ИНС, и векторов угловой ориентации, скорости и координат корабля, измеренных КИНС.
Полная длительность процедур начальной выставки ИНС, обеспечивающая заданный уровень точности, на суше и корабле различна. Например, как показывает практика эксплуатации одной из современных лазерных инерциальных навигационных систем (ЛИНС), полная длительность начальной выставки этой ЛИНС на широте 45° на суше и корабле составляет соответственно 4 и 7 минут (при спокойном состоянии моря).
В связи с чувствительностью процедуры начальной выставки ИНС на суше к внешним возмущениям, запуск двигателей ЛА производят только после завершения начальной выставки ИНС и перевода ее в режим РАБОТА. Длительность запуска двигателей, проверки их работоспособности и других предстартовых процедур может составлять 3-5 минут. Кроме этого, при базировании на сухопутном аэродроме, ЛА до взлета необходимо проехать достаточно большое расстояние от точки стоянки до начала взлетно-посадочной полосы (ВПП). В зависимости от конфигурации аэродрома и рулежных дорожек, а также назначенного, в зависимости от ветра, направления взлета это расстояние может быть существенно больше длины самой ВИН. С учетом скорости, с которой ЛА может перемещаться по аэродрому, необходимости ожидания разрешительных команд на пересечение перекрестков и на взлет, длительность маневрирования ЛА на аэродроме может достигать 5-10 мин.
В результате общее время готовности ЛА к взлету с наземного аэродрома может составлять 10-15 мин, что в некоторых ситуациях неприемлемо.
Целью предлагаемого изобретения является сокращение интегрального времени готовности ЛА к взлету за счет совмещения процесса начальной выставки ИНС с процедурами запуска двигателей ЛА и движения ЛА к ВПП.
Как известно, режим выставки ИНС на корабле изначально предполагает наличие существенных возмущающих воздействий на ЛА из-за движения корабля в условиях взволнованного моря. Анализ характерных воздействий на ИНС процедур запуска двигателей и движения ЛА по аэродрому показывает, что они по частотно-амплитудным и скоростным характеристикам вполне соответствуют требованиям к условиям проведения начальной выставки на корабле.
Поэтому поставленная цель для ИНС, обладающей свойствами начальной выставки как на суше, так и на корабле, обеспечивается тем, что, относительно способа-прототипа, в предлагаемом способе проводят в минимальном объеме начальную выставку ИНС при неподвижном ЛА в режиме гирокомпасирования, а затем, после достижения минимально достаточных характеристик ИНС, т.е. дождавшись как минимум окончания этапа грубой выставки ИНС, осуществляют запуск двигателей и начинают движение ЛА на взлет, и при этом продолжают начальную выставку ИНС в режиме выставки на корабле. Для этого представляют, что самолет находится на палубе движущегося корабля и данные, которые должны поступать на вход ИНС от навигационных систем корабля, подменяют данными, полученными путем соответствующей обработки данных, измеренных самой ИНС и широко применяемой на борту современных ЛА спутниковой навигационной системы (СНС).
Длительность этапа грубой выставки современных ИНС составляет 30-40 секунд. При этом современные ИНС могут быть переведены в режим РАБОТА, с несколько ухудшенными характеристиками по точности, еще до завершения полной начальной выставки. Возможность прервать начальную выставку на корабле и перевести вышеупомянутую ЛИНС в режим РАБОТА на широте 45° наступает через 3 минуты после включения питания. Т.е., если ЛА, после завершения этапа грубой выставки ЛИНС, начнет движение к ВПП, то к моменту выруливания ЛА на ВПП такая ЛИНС, как правило, будет уже готова к переводу в режим РАБОТА. Если движение ЛА по аэродрому к ВПП продолжится большее время, то к моменту выруливания ЛА на ВПП начальная выставка в ЛИНС может завершиться в полном объеме.
Таким образом, с учетом только существенных для предлагаемого изобретения признаков, в способе подготовки ИНС к полету, в соответствии с которым, при подготовке ЛА к взлету с наземного аэродрома, начальную выставку ИНС осуществляют при неподвижном ЛА в режиме гирокомпасирования, а при подготовке ЛА к взлету с корабля, начальную выставку ИНС осуществляют в режиме выставки на корабле путем согласования в ИНС, с учетом положения и движения ЛА относительно центра масс корабля, соответственно векторов угловой ориентации, скорости и координат ЛА, измеряемых ИНС, и подаваемых на вход ИНС векторов угловой ориентации, скорости и координат корабля, движение ЛА на взлет с наземного аэродрома начинают сразу после достижения минимально достаточных характеристик ИНС, причем с этого момента продолжают начальную выставку ИНС в режиме выставки на корабле, для чего на входе ИНС углы рысканья, крена, дифферента корабля и скорости их изменения приравнивают соответственно к углам курса, крена, тангажа и скоростям их изменения, измеренным ИНС, координаты ЛА относительно центра масс корабля приравнивают к нулю, а координаты и вектор скорости корабля приравнивают к координатам и вектору скорости, измеренным СНС ЛА.
Как известно, СНС являются радиотехническими системами со всеми вытекающими из этого достоинствами и недостатками, например их работоспособность может быть нарушена искусственными и естественными помехами. Т.е. в силу различных причин СНС могут быть в неработоспособном состоянии. В такой ситуации поставленная ранее цель может быть достигнута тем, что начальную выставку ИНС, после начала движения ЛА на взлет, продолжают только во время возможных остановок ЛА, приостанавливая ее во время движения ЛА. Для приостановки процесса начальной выставки достаточно приравнять векторы углового положения, скорости и координат корабля к соответствующим векторам углового положения, скорости и координат ЛА, измеренным ИНС, т.е. сигналы с выхода ИНС подать на вход ИНС в виде соответствующих параметров движения корабля. Для продолжения процесса начальной выставки во время остановки ЛА необходимо приравнять вектор линейной скорости корабля к нулю, а координаты местоположения корабля зафиксировать на момент остановки.
Таким образом, при отсутствии данных от СНС, в предлагаемом способе подготовки ИНС к полету, после начала движения ЛА на взлет, начальную выставку ИНС продолжают только во время возможных остановок ЛА, приостанавливая ее во время движения ЛА, для чего во время движения координаты и вектор скорости корабля приравнивают соответственно к координатам и вектору скорости, измеренным ИНС, а на время остановок координаты корабля фиксируют, а вектор скорости корабля приравнивают к нулю.
ИНС ЛА измеряет и определяет следующие параметры: составляющие вектора угловой скорости по осям связанной системы координат ωux, ωuy, ωuz, составляющие вектора ускорения по осям связанной системы координат aux, auy, auz, курс ψu, параметры углового положения крен γu, тангаж υu, составляющие вектора скорости по осям географической системы координат Vun, Vue, Vuh, географические координаты местоположения φu, λu и другие параметры.
Скорости изменения курса ωuψ, крена ωuγ, тангажа ωuυ ЛА могут быть определены из соотношений:
ωuψ=(ωuz·sinγu-ωuy·cosγu)/cosυu;
ωuγ=ωux+ωuψ·sinυu;
ωuυ=ωuy·sinγu+ωuz·cosγu.
Аналогичные параметры измеряют КИНС: угол рысканья ψк, крен γк, дифферент υк, скорости изменения угла рысканья ωкψ, крена ωкγ, дифферента ωкυ, составляющие вектора линейной скорости по осям географической системы координат Vкn, Vкe, Vкh, географические координаты местоположения φк, λк и другие параметры.
ПРИМЕЧАНИЕ: Для большей наглядности, при обозначении параметров движения корабля, в материалах заявки используются буквы греческого алфавита, принятые для обозначения соответствующих параметров в авиации, а не во флоте.
СНС ЛА измеряет составляющие вектора скорости по осям географической системы координат Vсn, Vce, Vch, географические координаты местоположения φс, λс и другие параметры.
В целом, с физической точки зрения, процедура определения начальных значений курса, крена, тангажа, составляющих вектора скорости и координат ЛА на этапе грубой выставки в режиме автономного гирокомпасирования на аэродроме, без учета погрешностей и особенностей функционирования датчиков угловых скоростей и ускорений, а также применяемых в ИНС методов обработки и фильтрации измеряемых данных, может быть проиллюстрирована следующими формулами (см. фиг.1):
ψu=arctg(-ωuz/ωux);
γu=arsin(auz/g);
υu=arsin(-aux/g);
Vun=Vue=Vuh=0;
φu=φu0;
λu=λu0.
Где g - модуль вектора ускорения силы тяжести G в точке местоположения ЛА.
При подготовке ЛА на аэродроме координаты начального местоположения φu0, λu0 вводят в ИНС сразу после ее включения из устройств долговременной памяти, которые физически могут входить в состав самой ИНС или бортовой вычислительной системы. При необходимости эти параметры могут быть изменены с соответствующих пультов управления.
С соответствующих пультов управления в ИНС также может быть введен начальный курс ЛА ψu0, который должен быть предварительно определен любым из известных методов визуальной ориентации.
Точность определения начального курса на этапе грубой выставки невысока. Как показывают расчеты и результаты моделирования, погрешность определения начального курса может составлять 5-10°. Как показывает практика, при наличии необходимых профессиональных навыков и опыта у обслуживающего персонала, такую же точность, без привлечения специальных оптических устройств, обеспечивают методы быстрой визуальной ориентации относительно ориентиров, сооружений и линий на аэродроме.
Таким образом, ИНС в конце этапа грубой выставки, с функциональной точки зрения, полностью работоспособна, т.е. обеспечивает измерение всех заданных параметров, но с невысокой точностью.
После завершения этапа грубой выставки в режиме гирокомпасирования, которое сопровождается выдачей из ИНС соответствующего сигнала готовности, ИНС переключают в режим выставки на корабле, что позволяет осуществить запуск двигателей и начать движение к ВПП, продолжая при этом процесс начальной выставки ИНС. При этом на вход ИНС в качестве параметров движения корабля подают данные, имитирующие работу КИНС, сформированные в соответствии со следующими формулами:
ψк=ψu;
γк=γu;
υк=υu;
X=Y=Z=0;
ωкψ=ωuψ;
ωкγ=ωuγ;
ωкυ=ωuυ;
Vкn=Vсn;
Vке=Vсе;
Vкh=Vсh;
φк=φс;
λк=λс.
В ИНС данные о скорости и координатах корабля, с учетом параметров X, Y, Z и ωкψ, ωкγ, ωкυ, пересчитывают к точке местоположения ЛА и формируют вектор измерения погрешностей ИНС:
ZVn=Vun-Vкn;
ZVe=Vue-Vке;
ZVh=Vuh-Vкh;
Zφ=φu-φк;
Zλ=λu-λк.
Для формирования оценок погрешностей ИНС в режиме начальной выставки на корабле вектор измерения погрешностей ИНС обрабатывают в соответствии с любым из известных методов статистической оптимизации.
Сама по себе процедура оценки погрешностей ИНС не является непосредственным предметом предлагаемого изобретения и поэтому в материалах заявки не описывается. Наиболее широко применяется для этих целей метод ОФК. Примеры применения метода ОФК для оценки погрешностей ИНС в режиме начальной выставки приведены в вышеупомянутых книгах.
В результате обработки вектора измерения погрешностей ИНС определяются оценки погрешностей ИНС в определении углов ориентации и скорости ЛА, которые компенсируются в выходных сигналах ИНС. В процессе начальной выставки может производиться также оценка погрешностей датчиков, входящих в состав ИНС. Например, постоянных составляющих дрейфов гироскопов.
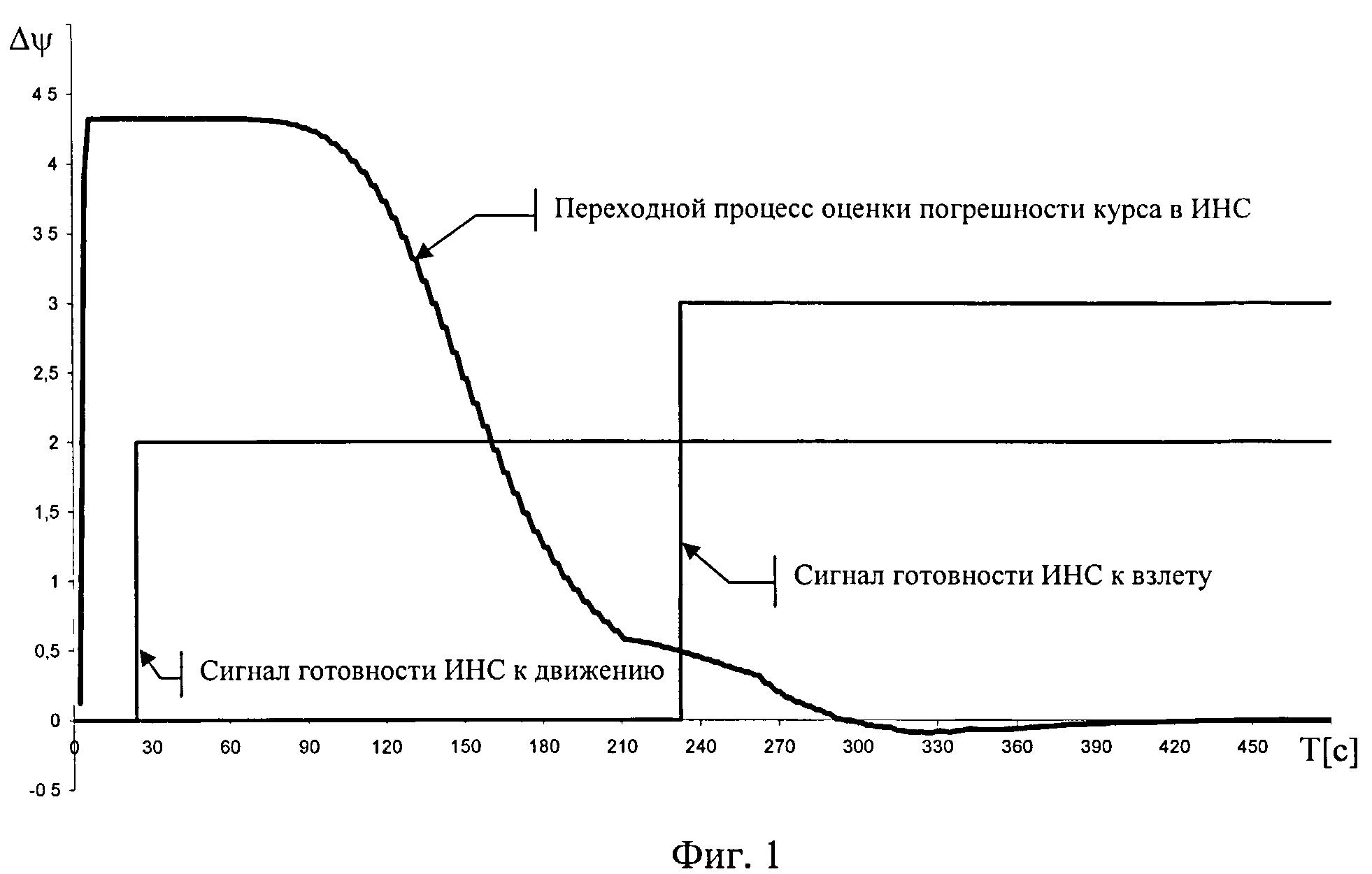
На основе анализа состояния процесса начальной выставки в ИНС последовательно формируются сигналы, обозначающие достижение различных уровней точностных характеристик: вначале возможность определять параметры угловой ориентации и начать движение, затем возможность прервать начальную выставку и начать взлет, а после полного окончания переходных процессов сигнал готовности к переходу в режим РАБОТА с номинальной точностью.
На фиг.1 приведен график переходного процесса оценки погрешности курса в одной из современных ЛИНС, начальная выставка которой при подготовке к взлету с аэродрома осуществлялась в соответствии с описанной в заявке процедурой. На график переходного процесса наложены графики выдачи из ЛИНС сигнала достоверности параметров угловой ориентации (готовность ЛИНС к движению) и сигнала разрешения прервать начальную выставку (готовность ЛИНС к взлету).
Эксперимент был произведен на широте 55.5° с.ш. Начальный стояночный курс ЛА был введен с погрешностью 4.3°. Как следует из графиков, на указанной широте предлагаемый способ для этой ЛИНС обеспечивает возможность осуществить запуск двигателей и начать движение ЛА на взлет через 30 секунд от момента включения ЛИНС, а интегральное время готовности ЛА к взлету может быть меньше 4 минут от момента включения ЛИНС. Погрешность определения курса в момент выдачи из ИНС сигнала готовности к взлету составила 0.5°. Такая погрешность, с учетом наличия в большинстве современных ИНС режима довыставки в воздухе, приемлема при решении большинства навигационно-пилотажных задач. При этом стандартная для современных ИНС точность определения курса в 0.1° была достигнута уже через 5 минут от момента включения ЛИНС.
При отсутствии достоверных данных от СНС, на вход ИНС в качестве параметров движения корабля подают данные, имитирующие работу КИНС, сформированные следующим образом.
Во время движения ЛА:
ψк=ψu;
γк=γu;
υк=υu;
X=Y=Z=0;
ωкψ=ωuψ;
ωкγ=ωuγ;
ωкυ=ωuυ;
Vкn=Vun;
Vке=Vuе;
Vкh=Vuh;
φк=φu;
λк=λu.
Во время остановок ЛА:
ψк=ψu;
γк=γu;
υк=υu;
X=Y=Z=0;
ωкψ=ωuψ;
ωкγ=ωuγ;
ωкυ=ωuυ;
Vкn=Vке=Vкh=0;
φк=φuф;
λк=λuф.
Где φuф и λuф - координаты ЛА из ИНС в момент начала остановки ЛА.
Таким образом, на примере технической реализации показано достижение следующего технического результата - дополнительно введенные в способ операции обеспечивают сокращение общего времени готовности ЛА к взлету с наземного аэродрома.
Комплексная система навигации и управления летательного аппарата
Способ определения скорости ветра на борту летательного аппарата и устройство, его реализующее
Способ управления летательным аппаратом при заходе на посадку
Вибрационный вакуумный микрогироскоп
Комплексная система управления траекторией летательного аппарата при заходе на посадку
Способ изготовления вакуумного микрогироскопа
Комплексная корреляционно-экстремальная навигационная система
Способ управления траекторией летательного аппарата при посадке на незапрограммированный аэродром
Способ управления траекторией посадки летательного аппарата на запрограммированный аэродром
Способ управления траекторией летательного аппарата при заходе на посадку
Комплексная система навигации и управления летательного аппарата
Способ определения скорости ветра на борту летательного аппарата и устройство, его реализующее
Способ управления летательным аппаратом при заходе на посадку
Вибрационный вакуумный микрогироскоп
Комплексная система управления траекторией летательного аппарата при заходе на посадку
Способ изготовления вакуумного микрогироскопа
Комплексная корреляционно-экстремальная навигационная система
Способ управления траекторией летательного аппарата при посадке на незапрограммированный аэродром
Способ управления траекторией посадки летательного аппарата на запрограммированный аэродром
Способ управления траекторией летательного аппарата при заходе на посадку

