Результат интеллектуальной деятельности: СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ НИЗКОЛЕТЯЩИХ ЦЕЛЕЙ
Вид РИД
Изобретение
Область техники
Изобретение относится к автоматике и вычислительной технике и может быть использовано при построении систем и комплексов противовоздушной обороны тактического звена управления, а именно для обнаружения низколетящих целей, которые, маскируясь в складках местности, предназначены для уничтожения основных вооружений противовоздушной обороны: мобильных радиолокационных станций, мобильных пунктов управления и мобильных пусковых установок.
Уровень техники
Известен способ обнаружения и сопровождения низколетящих целей, при котором радиолокационные станции располагают на соответствующих беспилотных вертолетах, которые поднимают над позицией зенитно-ракетного комплекса на высоту до одного километра, обрабатывают на бортовых электронных вычислительных машинах радиолокационные сигналы, поступающие от радиолокационных станций, обнаруживают низколетящую цель, рассчитывают на бортовых электронных вычислительных машинах азимутальные углы, расстояния до низколетящей цели и углы места (Табачук И.С., Ташкеев Л.Л.. Угрозы с предельно малых высот. Воздушно-космическая оборона №1, с. 50-57, 2007). К достоинству способа можно отнести уверенное обнаружение подвижных низколетящих целей типа самолетов. Беспилотные, боевые вертолеты могут зависать в одной точке и менять направление полета на 180°. При использовании этого способа цель будет обнаруживаться только во время ее перемещения. К недостатку следует отнести активный режим излучения сигнала радиолокационных станций, расположенных на соответствующих беспилотных вертолетах и, как следствие, их обнаружение на больших расстояниях и уничтожение при помощи противорадиолокационных ракет.
Известен способ обнаружения и сопровождения низколетящих целей, при котором зенитно-ракетный комплекс на сухопутном транспортном средстве устанавливают в зоне ответственности противовоздушной обороны, обрабатывают на бортовой электронной вычислительной машине радиолокационные сигналы, поступающие от радиолокационной станции, обнаруживают низколетящую цель на границе зоны ответственности противовоздушной обороны, рассчитывают на бортовой электронной вычислительной машине азимутальные углы, расстояния до низколетящей цели и углы места, передают эту информацию на бортовую оптико-электронную систему, установленную на зенитно-ракетном комплексе, тем самым нацеливают бортовую оптико-электронную систему на низколетящую цель, отключают радиолокационную станцию, обрабатывают видеосигналы низколетящей цели, поступающие от бортовой оптико-электронной системы (Информационная система «Ракетная техника»: Зенитный ракетный комплекс «Avenger», Василин Н.Я., Гуревич А.Л. Зенитные ракетные комплексы. - Мн.: ООО «Попурри», 2002-464 с.).
Современные зенитно-ракетные комплексы малой дальности, например: «Avenger» американской фирмы «Boeing Aerospace Company», «Crotale NG» французской компании «Thales Air Defense», «Pansyr-S1», изделие «Конструкторского бюро приборов» г. Тула, предназначены для обнаружения, сопровождения и уничтожения воздушных целей и в том числе низколетящих целей в зоне ответственности войсковой противовоздушной обороны.
Для успешного решения этой задачи путем обнаружения целей на предельных дальностях работы радиолокационных станций с последующим их молчанием новейшие зенитно-ракетные комплексы оснащены оптико-электронными системами, которые без излучения радиоволн (как у радиолокационных станций), в пассивном режиме, при любых погодных условиях, ночью и днем позволяют в пределах прямой видимости, получив информацию о цели (азимутальные углы, расстояния до низколетящей цели и углы места) от радиолокационных станций, обнаруживать и сопровождать низколетящие цели от предельных дальностей до минимальных расстояний от пусковой установки.
Отличительной особенностью зенитно-ракетных комплексов малой дальности является компактное расположение оптико-электронной системы, радиолокационной станции обзора и целеуказания с фазированной антенной решеткой, бортовых электронных вычислительных машин, пусковой установки на одном сухопутном транспортном средстве (автомобильном шасси). Комплексы оснащаются коммуникационным оборудованием, обеспечивающим прием информации о целеуказании и отображение воздушной обстановки, поступающей от вышестоящих командных пунктов противовоздушной обороны.
Оптико-электронные системы (на примере зенитно-ракетного комплекса «Avenger») состоят, из нескольких устройств: прицела оптического диапазона СА-562 фирмы CAI, тепловизора Magnavox AN/VLR-1 (или IR-18), лазерного дальномера.
Таким образом, в современных зенитно-ракетных комплексах имеется оптико-электронная система, жестко связанная (конструктивно) с пусковой установкой зенитно-ракетного комплекса.
Недостатком указанного способа обнаружения и сопровождения низколетящих целей является то, что при сложном микрорельефе местности для обнаружения и сопровождения низколетящей цели, прячущейся от радиолокационных станций в складках местности и меняющей направление своего движения (беспилотные боевые вертолеты) при обнаружении облучения от радиолокационной станции, необходимо очень большое количество оптико-электронных систем или равное им количество зенитно-ракетных комплексов, для обеспечения контроля над всеми участками поверхности земли закрытой от прямой видимости оптико-электронных систем, расположенных на каждом зенитно-ракетном комплексе. Такое конструкторское решение по размещению оптико-электронной системы, очевидно, принято по аналогии с размещением радиолокационной станции непосредственно на подвижном сухопутном транспортном средстве совместно с пусковой установкой для обеспечения автономной боеспособности одного зенитно-ракетного комплекса. Необходимо отметить тот факт, что стоимость радиолокационной станции в 5-10 раз выше, чем стоимость оптико-электронной системы. Стоимость самого зенитно-ракетного комплекса в 100-1000 раз выше, чем стоимость оптико-электронной системы.
Кроме этого недостатка существенным является тот факт, что «поскольку средства воздушного нападения используются как на больших (свыше 10 км), так и на предельно малых (5-15 м) высотах, средства их сопровождения должны иметь, с одной стороны, максимальную дальность сопровождения (более 10 км), а с другой - достаточно малую ближнюю зону. Увеличение максимальной дальности влечет за собой рост размера входных зрачков оптических приборов и, как следствие, их массы и габаритов. А требование по сокращению ближней зоны вызывает необходимость повышения динамических возможностей сервоприводов, но рост массы нагрузки и, соответственно, моментов инерции и трения препятствует решению этой задачи. Таким образом, даже в первом приближении задача создания оптико-электронной системы сопровождения является внутренне противоречивой …» (Оптико-электронная система сопровождения цели и ЗУР. Статья в электронном журнале Авиапанорама (39), №3, июнь, 2003 г., www.aviaopanorama.su, где описаны конструкционные особенности зенитно-ракетного комплекса «Pansyr-S1»). Таким образом, на малых расстояниях до цели сервопривода оптико-электронной системы не могут развить необходимую угловую скорость для успешного сопровождения скоростной низколетящей цели. В этом случае «применяется инерционное сопровождение цели по экстраполированным координатам из-за перерыва оптической связи с целью …».
Поэтому техническое решение по использованию оптико-электронных систем, установленных на зенитно-ракетных комплексах, для обеспечения контроля над всеми участками поверхности земли, закрытой от прямой видимости этих оптико-электронных систем, является явно не эффективным, а сами оптико-электронные системы требуют повышения динамических возможностей сервоприводов, имеют большую массу и как следствие имеют зоны потери оптической связи с целью.
Наиболее близким по технической сущности к заявляемому предполагаемому изобретению (прототипом) является способ обнаружения и сопровождения низколетящих целей, при котором зенитно-ракетный комплекс на сухопутном транспортном средстве устанавливают в зоне ответственности противовоздушной обороны, (m≥1) мобильных постов воздушного наблюдения с оптико-электронными системами устанавливают на возвышенностях, на берегах и в руслах рек, в оврагах, препятствующих обнаружению низколетящей цели при помощи радиолокационной станции и бортовой оптико-электронной системы, обрабатывают на бортовой электронной вычислительной машине радиолокационные сигналы, поступающие от радиолокационной станции, обнаруживают низколетящую цель на границе зоны ответственности противовоздушной обороны, рассчитывают на бортовой электронной вычислительной машине азимутальный угол, расстояние до низколетящей цели и угол места для бортовой и каждой оптико-электронной системы мобильных постов воздушного наблюдения, передают эту информацию на соответствующие мобильные посты воздушного наблюдения, тем самым нацеливают оптико-электронные системы на низколетяшую цель, отключают радиолокационную станцию, обрабатывают сигналы низколетящей цели, поступающие от каждой оптико-электронной системы на электронных вычислительных машинах, соответствующих мобильных постов воздушного наблюдения, рассчитывают и передают азимутальные углы, расстояния до низколетящей цели и углы места на бортовую электронную вычислительную машину зенитно-ракетного комплекса, тем самым обнаруживают и сопровождают низколетящую цель внутри всей зоны ответственности противовоздушной обороны (Способ обнаружения и сопровождения низколетящих целей, патент RU №2361235 С1 от 03.12.2007 г., МПК G01S 13/66, Б.Г. Майоров и др.).
Недостатком указанного способа обнаружения и сопровождения низколетящих целей является то, что при сложном микрорельефе местности для обнаружения и сопровождения низколетящей цели, прячущейся от радиолокационных станций в складках местности и меняющей направление своего движения (беспилотные боевые вертолеты) при обнаружении облучения от радиолокационной станции, необходимо большое количество мобильных постов воздушного наблюдения с оптико-электронными системами, установленными на грунт, для обеспечения контроля над всеми участками поверхности земли, скрытой от прямой видимости бортовой оптико-электронной системы, расположенной на зенитно-ракетном комплексе. При этом расположение мобильных постов воздушного наблюдения должно обеспечивать обнаружение и сопровождение низколетящей цели, как в дальней зоне, так и в ближней зоне от их точки стояния, что вступает в противоречие с массогабаритными характеристиками, жесткостью конструкции и инерционностью серворприводов оптико-электронных систем. Известное техническое решение позволяет разрешить это противоречие только за счет большого количества применяемых одновременно мобильных постов воздушного наблюдения, укомплектованных громоздкими оптико-электронными системами. Кроме этого большие массогабаритные характеристики оптико-электронных систем мобильных постов воздушного наблюдения и как следствие недостаточная скорость и ускорение ориентации их датчиков, не позволяют определять координаты и отслеживать непрерывно беспилотные боевые вертолеты при их резких маневрах в ближней зоне наблюдения. В ближней зоне наблюдения мобильных постов воздушного наблюдения существует опасность поражения этих постов «дружественным» огнем зенитно-ракетного комплекса из-за отсутствия в его бортовой машине информации об отклонении низколетящей цели от ее аппроксимированной траектории.
Раскрытие сущности изобретения
Предлагаемый способ обнаружения и сопровождения низколетящих целей, позволяет обнаруживать и сопровождать низколетящие цели за всеми неровностями поверхности земли, в том числе инженерными сооружениями и растительностью (деревьями), при этом обнаружение осуществляется с существенным уменьшением количества мобильных постов воздушного наблюдения с оптико-электронными системами. Способ позволяет обнаруживать цели на дальних подступах к точке стояния одного зенитно-ракетного комплекса при помощи его радиолокационной станции, переводить станцию в режим молчания и далее обнаруживать и сопровождать низколетящую цель во всей зоне ответственности зенитно-ракетного комплекса.
Так - как зона наблюдения каждой оптико-электронной системы мобильного постов воздушного наблюдения существенно увеличивается за счет оперативного увеличения высоты точки наблюдения, то при достаточно малом количестве этих оптико-электронных систем перекрывается вся дальняя зона ответственности зенитно-ракетного комплекса. Это снимает требование по увеличению максимальной дальности обнаружения за счет роста размера входных оптических зрачков (увеличения массы оптики) оптико-электронных систем. Требование по обеспечению обнаружения цели в ближней зоне осуществляется за счет снижения массы самой оптико-электронной системы, и тем самым за счет повышения динамических возможностей ее сервоприводов. Таким образом, техническое противоречие между ростом массы нагрузки в виде оптико-электронной системы на сервоприводы и, соответственно, ростом моментов инерции и трения упраздняется. В ближней зоне наблюдения мобильных постов воздушного наблюдения устранена опасность поражения этих постов «дружественным» огнем зенитно-ракетного комплекса за счет использования критерия наибольшего отклонения траектории низколетящей цели от ее аппроксимированной траектории и определения момента времени пуска ракеты.
Тем самым повышается сохранность и скрытность противовоздушной обороны.
В известном способе обнаружения и сопровождения низколетящих целей зенитно-ракетный комплекс на сухопутном транспортном средстве устанавливают в зоне ответственности противовоздушной обороны, (m≥1) мобильных постов воздушного наблюдения с оптико-электронными системами устанавливают на возвышенностях, на берегах и в руслах рек, в оврагах, препятствующих обнаружению низколетящей цели при помощи радиолокационной станции и бортовой оптико-электронной системы, обрабатывают на бортовой электронной вычислительной машине радиолокационные сигналы, поступающие от радиолокационной станции, обнаруживают низколетящую цель на границе зоны ответственности противовоздушной обороны, рассчитывают на бортовой электронной вычислительной машине азимутальный угол, расстояние до низколетящей цели и угол места для бортовой и каждой оптико-электронной системы мобильных постов воздушного наблюдения, передают эту информацию на соответствующие мобильные посты воздушного наблюдения, тем самым нацеливают оптико-электронные системы на низколетящую цель, отключают радиолокационную станцию, обрабатывают сигналы низколетящей цели, поступающие от каждой оптико-электронной системы на электронных вычислительных машинах, соответствующих мобильных постов воздушного наблюдения, рассчитывают и передают азимутальные углы, расстояния до низколетящей цели и углы места на бортовую электронную вычислительную машину зенитно-ракетного комплекса.
Целью данного изобретения является решение новой научно-технической задачи, а именно, обнаружение и сопровождение низколетящей цели на дальних подступах к точке стояния зенитно-ракетного комплекса, обеспечение скрытности работы радиолокационной станции, сокращения количества мобильных постов воздушного наблюдения с оптико-электронными системами, устранения их зон невидимости, возникающих при сопровождении высокоскоростных, маневренных низколетящих целей, как в дальней, так и в ближней зонах ответственности зенитно-ракетного комплекса, для чего в бортовой электронной вычислительной машине зенитно-ракетного комплекса рассчитывают высоту подъема каждой гондолы с оптико-электронной системой, входящей в состав мобильных постов воздушного наблюдения, в зависимости от направления возможного появления низколетящей цели и рельефа местности, растительности и строений, осуществляют подъем гондол с оптико-электронными системами на расчетные высоты при помощи сочлененных с гондолами электрических квадрокоптеров, обнаруживают и сопровождают низколетящую цель внутри зоны ответственности противовоздушной обороны, измеряют расстояние от гондолы до низколетящей цели, измеряют максимальные значения производных по времени t от траектории полета низколетящей цели: скорости V, ускорения а, резкости R и так далее, замеряют интервал времени Tsn необходимый для этих измерений и расчетов, из критерия наибольшего отклонения  где n - порядок старшей известной производной от траектории цели по времени t, определяют наибольшее отклонение траектории низколетящей цели Δ=maxp(0)(t=0,5Tsn) от участка линейной аппроксимации траектории на интервале времени Tsn:
где n - порядок старшей известной производной от траектории цели по времени t, определяют наибольшее отклонение траектории низколетящей цели Δ=maxp(0)(t=0,5Tsn) от участка линейной аппроксимации траектории на интервале времени Tsn:  результаты замеров и расчетов траектории низколетящей цели регулярно передают в бортовую электронную вычислительную машину зенитно-ракетного комплекса, по мере уменьшения расстояния от оптико-электронной системы до низколетящей цели уменьшают высоту подъема гондолы с оптико-электронной системой при помощи сочлененного с гондолой электрического квадрокоптера, после пролета низколетящей цели мимо оптико-электронной системы высоту подъема гондолы постепенно увеличивают, тем самым обнаруживают и сопровождают низколетящую цель непрерывно во времени, внутри всей зоны ответственности противовоздушной обороны.
результаты замеров и расчетов траектории низколетящей цели регулярно передают в бортовую электронную вычислительную машину зенитно-ракетного комплекса, по мере уменьшения расстояния от оптико-электронной системы до низколетящей цели уменьшают высоту подъема гондолы с оптико-электронной системой при помощи сочлененного с гондолой электрического квадрокоптера, после пролета низколетящей цели мимо оптико-электронной системы высоту подъема гондолы постепенно увеличивают, тем самым обнаруживают и сопровождают низколетящую цель непрерывно во времени, внутри всей зоны ответственности противовоздушной обороны.
Краткое описание чертежей
На фиг. 1 изображена (условно) схема противовоздушной обороны объекта, обозначены: зенитно-ракетный комплекс 1, мобильный пост воздушного наблюдения 2 с оптико-электронной системой, низколетящая цель 3 (беспилотный, боевой вертолет).
На фиг. 2 изображен (условно) зенитно-ракетный комплекс 1, обозначены: сухопутное транспортное средство 4, пусковая установка 5, радиолокационная станция 6, бортовая оптико-электронная система 7, бортовая система спутниковой навигации 8, бортовая электронная вычислительная машина 9.
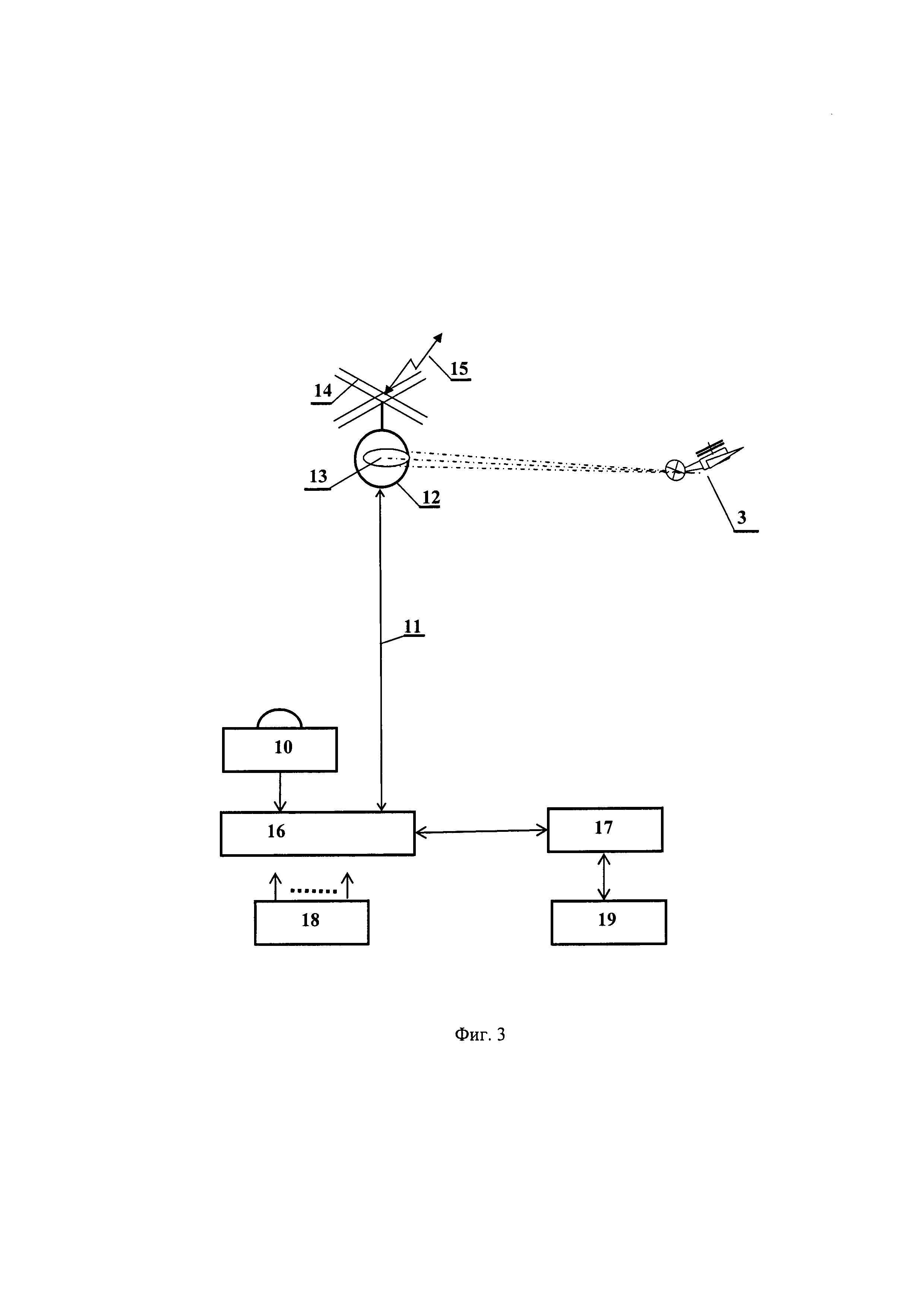
На фиг. 3 изображена схема устройства управления мобильного поста воздушного наблюдения 2, обозначены: система спутниковой навигации 10, кабель-корд 11, гондола 12 с оптико-электронной системой 13, один из винтов квадрокоптера 14, антенна 15 радиостанции, электронная вычислительная машина 16, радиомодем 17, блок автономного электропитания 18, радиостанция 19.
На фиг. 4 изображена гондола 12 с оптико-электронной системой 13, обозначены: сервопривод 20 оптико-электронной системы 13, входящие в нее: прицел оптического диапазона 21, тепловизор 22, лазерный дальномер 23.
На фиг. 5 изображена траектория наибольшего отклонения низколетящей цели между двумя соседними измерениями параметров цели.
Осуществление изобретения
Способ обнаружения и сопровождения низколетящих целей может быть реализован так, что зенитно-ракетный комплекс на сухопутном транспортном средстве устанавливают в зоне ответственности противовоздушной обороны, (m≥1) мобильных постов воздушного наблюдения с оптико-электронными системами устанавливают на возвышенностях, на берегах и в руслах рек, в оврагах, препятствующих обнаружению низколетящей цели при помощи радиолокационной станции и бортовой оптико-электронной системы, на бортовой электронной вычислительной машине рассчитывают высоту подъема каждой гондолы с оптико-электронной системой, входящей в состав мобильных постов воздушного наблюдения, в зависимости от направления возможного появления низколетящей цели для соответствующей оптико-электронной системы, рельефа местности, растительности и строений, осуществляют подъем гондол с оптико-электронными системами на расчетные высоты при помощи сочлененных с гондолами электрических квадрокоптеров, обрабатывают на бортовой электронной вычислительной машине радиолокационные сигналы, поступающие от радиолокационной станции, обнаруживают низколетящую цель на границе зоны ответственности противовоздушной обороны, рассчитывают на бортовой электронной вычислительной машине азимутальный угол, расстояние до низколетящей цели и угол места для бортовой и каждой оптико-электронной системы мобильных постов воздушного наблюдения, передают эту информацию на соответствующие мобильные посты воздушного наблюдения, тем самым нацеливают оптико-электронные системы на низколетящую цель, отключают радиолокационную станцию, обрабатывают сигналы низколетящей цели, поступающие от каждой оптико-электронной системы на электронных вычислительных машинах, соответствующих мобильных постов воздушного наблюдения, рассчитывают и передают азимутальные углы, расстояния до низколетящей цели и углы места на бортовую электронную вычислительную машину зенитно-ракетного комплекса, измеряют расстояние от гондолы до низколетящей цели, измеряют линейную скорость V, рассчитывают ускорение полета а и резкость изменения траектории полета R низколетящей цели, замеряют интервал времени Ts3 необходимый для этих измерений и расчетов, из критерия наибольшего отклонения  где n - порядок старшей известной производной от траектории цели по времени определяют наибольшее отклонение траектории низколетящей цели Δ=maxp(0)(t=0,5Tsn) от участка линейной аппроксимации траектории на интервале времени Tsn:
где n - порядок старшей известной производной от траектории цели по времени определяют наибольшее отклонение траектории низколетящей цели Δ=maxp(0)(t=0,5Tsn) от участка линейной аппроксимации траектории на интервале времени Tsn:  результаты замеров и расчетов траектории низколетящей цели регулярно передают в бортовую электронную вычислительную машину зенитно-ракетного комплекса, по мере уменьшения расстояния от оптико-электронной системы до низколетящей цели уменьшают высоту подъема гондолы с оптико-электронной системой при помощи сочлененного с гондолой электрического квадрокоптера, после пролета низколетящей цели мимо оптико-электронной системы высоту подъема гондолы постепенно увеличивают, тем самым обнаруживают и сопровождают низколетящую цель непрерывно во времени, внутри всей зоны ответственности противовоздушной обороны.
результаты замеров и расчетов траектории низколетящей цели регулярно передают в бортовую электронную вычислительную машину зенитно-ракетного комплекса, по мере уменьшения расстояния от оптико-электронной системы до низколетящей цели уменьшают высоту подъема гондолы с оптико-электронной системой при помощи сочлененного с гондолой электрического квадрокоптера, после пролета низколетящей цели мимо оптико-электронной системы высоту подъема гондолы постепенно увеличивают, тем самым обнаруживают и сопровождают низколетящую цель непрерывно во времени, внутри всей зоны ответственности противовоздушной обороны.
Задача обнаружения и сопровождения низколетящих целей решена без использования большого количества мобильных постов воздушного наблюдения с оптико-электронными системами, так - как опасные пути пролета низколетящих целей перекрываются для обнаружения мобильными постами воздушного наблюдения с оптико-электронными системами, которые могут оперативно менять зону обзора или величину наблюдаемой площади за счет изменения высоты точки наблюдения. Кроме этого, оптико-электронные системы мобильных постов воздушного наблюдения удалены от зенитно-ракетного комплекса и установлены, как в дальней, так и в ближней зонах ответственности зенитно-ракетного комплекса, приближены к возможным, удобным для реализации скрытного от локаторов пролета низколетящей цели к объекту обороны или к самому зенитно-ракетному комплексу, поэтому требования к дальности обнаружения цели, разрешающей способности выносной оптико-электронные системы, ее чувствительности, размеру входных зрачков, массы оптических систем должны быть снижены по сравнению с аналогичными характеристиками бортовых оптико-электронных систем, устанавливаемых на зенитно-ракетных комплексах.
Устранен существенный недостаток конструкции бортовых оптико-электронных систем, вызывающий трудности в их применении для обнаружения низколетящих целей, заключающийся в необходимости применять одинаковые бортовые оптико-электронные системы на больших и очень малых дальностях обнаружения и сопровождения целей. Для работы на максимальной дальности необходима мощная оптика, что приводит к увеличению массы. Для работы на очень малых дальностях необходима большая скорость вращения оптико-электронной системы, при малых инерциальных задержках, что противоречит увеличению массы оптики. Эти противоречивые требования устраняются системным способом, путем применения достаточного количества динамичных по вертикали, малых по массе оптико-электронных систем, принадлежащих мобильным пунктам воздушного наблюдения, которые при обнаружении низколетящей цели в дальней зоне уменьшают постепенно высоту расположения оптико-электронной системы над земной поверхностью. В ближней зоне наблюдения мобильных постов воздушного наблюдения устранена опасность поражения этих постов «дружественным» огнем зенитно-ракетного комплекса за счет расчета критерия наибольшего отклонения траектории низколетящей цели от ее аппроксимированной траектории.
Пример варианта выполнения изобретения
Способ обнаружения и сопровождения низколетящих целей 3 реализуется следующим образом. Поясним операции: «… зенитно-ракетный комплекс 1 на сухопутном транспортном средстве 4 устанавливают в зоне ответственности противовоздушной обороны, (m≥1) мобильных постов воздушного наблюдения 2 с оптико-электронными системами 13 устанавливают на возвышенностях, берегах и в руслах рек, в оврагах, препятствующих обнаружению низколетящей цели при помощи радиолокационной станции 6 и бортовой оптико-электронной системы 7». Расчет (экипаж) войскового зенитно-ракетного комплекса 1, или воинское подразделение (взвод, рота) зенитно-ракетных комплексов 1, получает боевое задание по обороне объекта и цифровую карту местности (изображена условно на фиг. 1). Служащие штаба указывают на этой карте координаты точки стояния зенитно-ракетного комплекса 1, границы объекта обороны, координаты точек установки мобильных постов воздушного наблюдения 2 с оптико-электронными системами 13, зоны невидимости участков местности радиолокационной станцией 6 и бортовой оптико-электронной системой 7 (из состава войскового зенитно-ракетного комплекса 1, см. фиг. 2), границу зоны ответственности зенитно-ракетного комплекса 1. Координаты точек установки выносных оптико-электронных систем 2 определяются таким образом, чтобы сделать видимыми зоны невидимости участков местности радиолокационной станцией 6 и бортовой оптико-электронной системой 7. Исходя из этого, расчет зенитно-ракетного комплекса 1 получает необходимое количество мобильных постов воздушного наблюдения 2 с оптико-электронными системами 13. Зенитно-ракетный комплекс 1 транспортируется до объекта обороны транспортным вертолетом или самолетом (на большие расстояния), или доходит на него своим ходом, используя сухопутное транспортное средство 4. По цифровой карте местности, загруженной в бортовую электронную вычислительную машину 9, и при помощи бортовой системы спутниковой навигации 8 находится точка стояния, в которой расчет производит развертывание зенитно-ракетного комплекса 1 и производит проверку работы пусковой установки 5, радиолокационной станции 6, бортовой оптико-электронной системы 7. В это время, мобильные посты воздушного наблюдения 2 с оптико-электронными системами 13 (на фиг. 1 три штуки) доставляются транспортным средством или своим ходом в районы точек установки, координаты которых записаны заранее в память электронных вычислительных машин 16 мобильных постов воздушного наблюдения 2 с оптико-электронными системами 13. Производится включение блока автономного электропитания 18 и координаты установки каждого мобильного поста воздушного наблюдения 2 с оптико-электронной системой 13 определяются автоматически, при помощи системы спутниковой навигации 10. Персонал запускает двигатель квадрокоптера 14 и поднимает гондолу 12 с оптико-электронной системой 13 на высоту, которая записана заранее в память электронных вычислительной машины 16. Персонал визуально проверяет зону видимости оптико-электронной системы 13 с определенной ранее на цифровой карте зоной и корректирует положение точки установки оптико-электронной системы 13 и высоту подъема гондолы 12. Координаты определяются системой спутниковой навигации 10, записываются в электронную вычислительную машину 16, которая (по команде персонала) через радиомодем 17, радиостанцию 19 передает их в бортовую электронную вычислительную машину 9 зенитно-ракетного комплекса 1. Таким образом, уточняются координаты точек установки и высоты подъема оптико-электронных систем 2 (в рассматриваемом примере m=3).
Во время установки мобильных постов воздушного наблюдения 2 с оптико-электронными системами 13 зенитно-ракетный комплекс 1 использует радиолокационную станцию 6, бортовую оптико-электронную систему 7 и осуществляет сканирование пространства зоны ответственности, обнаружение и сопровождение воздушных целей в соответствии с известным способом.
Поясним операции: «… обрабатывают на бортовой электронной вычислительной машине зенитно-ракетного комплекса радиолокационные сигналы, поступающие от радиолокационной станции, обнаруживают низколетящую цель на границе зоны ответственности противовоздушной обороны, рассчитывают на бортовой электронной вычислительной машине азимутальные углы, расстояния до низколетящей цели и углы места, передают эту информацию на бортовую оптико-электронную систему, установленную на зенитно-ракетном комплексе, тем самым нацеливают бортовую оптико-электронную систему на низколетящую цель …».
Допустим, что после установки мобильных постов воздушного наблюдения 2 с оптико-электронными системами 13, радиолокационная станция 6 получает радиолокационный сигнал о низколетящей цели 3 (на фиг. 1 беспилотном, боевом вертолете) или вышестоящее звено противовоздушной обороны передает войсковому звену информацию о направлении приближения средства воздушного нападения. Информация поступает в бортовую электронную вычислительную машину 9, которая рассчитывает азимутальные углы, расстояния до низколетящей цели 3 и углы места. Результаты обработки передаются на приводы пусковой установки 5, которая занимает положение в пространстве, соответствующее направлению на низколетящую цель 3 с необходимым упреждением. Бортовая оптико-электронная система 7, закрепленная на пусковой установке 5, так же принимает направление на низколетящую цель 3. При помощи привода происходит настройка фокусных расстояний прицела оптического диапазона и тепловизора (на фиг. 2 не обозначены) из состава бортовой оптико-электронной системы 7.
Поясним операции: «… отключают радиолокационную станцию 6, обрабатывают сигналы низколетящей цели 3, поступающие от каждой оптико-электронной системы 13 на электронных вычислительных машинах 16, соответствующих мобильных постов воздушного наблюдения 2, рассчитывают и передают азимутальные углы, расстояния до низколетящей цели 3 и углы места в бортовую электронную вычислительную машину 9 зенитно-ракетного комплекса 1 …»
После захвата низколетящей цели 3 на больших расстояниях (до 30÷50 км) в радиолокационной станции 6 отключают режим излучения сигнала (активный режим) для обеспечения скрытности зенитно-ракетного комплекса 1 от средств радиоразведки противника и противорадиолокационных ракет с головками самонаведения. Сопровождение низколетящей цели 3 в этот промежуток времени осуществляется при помощи бортовой оптико-электронной системы 7, которое на больших расстояниях может быть успешным только при высотах полета цели более 100 м. Производится обработка видео, тепловых образов низколетящей цели 3 в бортовой электронной вычислительной машине 9, сверка с образами и характеристиками целей из каталога возможных целей. При этом возможен запрос к цели по системе «свой-чужой» для уточнения принадлежности.
Поясним операции: «… рассчитывают на бортовой электронной вычислительной машине 9 направления возможного появления низколетящей цели для каждого мобильного поста воздушного наблюдения 2 с оптико-электронной системой 13, нацеливают оптико-электронные системы 13 мобильных постов воздушного наблюдения 2 на расчетные направления появления низколетящей цели, …».
Бортовая электронная вычислительная машина 9 вычисляет траекторию полета цели и рассчитывает направления возможного появления низколетящей цели 3 для каждого мобильного поста воздушного наблюдения 2 с оптико-электронной системой 13. Далее через радиомодем и радиостанцию зенитно-ракетного комплекса 1 информация о направлениях (азимутальные углы) передается на радиостанцию 19, радиомодем 17 и электронную вычислительную машину 16, которая через сервопривод 20 нацеливают (разворачивает) прицел оптического диапазона 21, тепловизор 22, лазерный дальномер 23 в направлении возможного появления низколетящей цели 3 и осуществляет корректировку высоты подъема гондолы 12 с оптико-электронной системой 13. При помощи привода 20 происходит настройка фокусных расстояний прицела оптического диапазона 21 и тепловизора 22 оптико-электронной системы 13 на расчетные расстояния появления низколетящей цели 3 (см. фиг. 3-4).
Поясним операции: «… обрабатывают видеосигналы низколетящей цели 3 на электронных вычислительных машинах 16 мобильных постов воздушного наблюдения 2 с оптико-электронными системами 13, передают азимутальные углы, расстояния до низколетящей цели и углы места от m оптико-электронных систем 13 на бортовую электронную вычислительную машину 9 зенитно-ракетного комплекса 1 …»
На фиг. 1 низколетящая цель 3 (беспилотный, боевой вертолет) пытается по дну оврага, вдоль ручья достичь позиции атаки зенитно-ракетного комплекса 1 и поразить его с близкого расстояния ракетой или осуществить самоподрыв. На излучине ручья находится мобильный пост воздушного наблюдения 2 с оптико-электронной системой 13, нацеленной на низовье ручья. Она, в зависимости от времени суток, в светлое время при помощи прицела оптического диапазона 21 и тепловизора 22 в темное время обнаруживает низколетящую цель 3. Производится обработка видео, тепловых образов низколетящей цели 3 в бортовой электронной вычислительной машине 16, сверка с образами и характеристиками целей из каталога возможных целей. Лазерным дальномером 23 замеряется расстояние до низко летящей цели 3. При помощи сервопривода 20 происходит поворот сенсоров оптико-электронной системы 13 на необходимые углы для сопровождения низколетящей цели 3. На электронной вычислительной машине 16 производится расчет и учет характеристик низколетящей цели 3: азимутального угла, расстояния до низколетящей цели 3 и угла места, линейной скорости V полета. Проводится расчет ускорения а полета цели и резкости R изменения траектории полета низколетящей цели, путем анализа максимальных по величине изменений скорости V полета в реальном времени. Замеряют интервал времени Ts3 необходимый для этих измерений и расчетов. Замер осуществляется в электронной вычислительной машине 16, которая управляет системной, согласованной работой прицела оптического диапазона 21, тепловизора 22, лазерного дальномера 23, севопривода 20 и квадрокоптера 14, который содержит гироскоп для стабилизации положения сцепки квадрокоптера 14 и гондолы 12 в пространстве.
Величина интервала времени Ts3, например, зависит от выполнения ряда операций для повышения точности и сокращение времени определения азимута. «Для этого при определении азимута предусматривают предварительную выставку оси чувствительности гироскопа, выполнение поворотов оси чувствительности гироскопа на заданные углы, измерение времени поворота гироскопа в каждое положение на заданный угол, определение суммарного времени измерения показаний гироскопа во всех положениях с учетом времени определения азимута, определение значений минимального необходимого времени измерения показаний в каждом положении оси чувствительности гироскопа и минимального необходимого количества измерений при заданном времени определения азимута». Буров Д.А. Способ определения азимута, Патент РФ №2560742 от 20.08.2015. Величина интервала времени для измерений и расчетов в этом примере составляет Ts3 ≈ 20 с.
Так как величина интервала времени Ts3 определяется особенностями конструкции и принципа действия гироскопа, то она не может определяться по теореме Найквиста-Котельникова-Шеннона (Ts3≠1/2ƒc) через граничную частоту ƒс спектра процесса движения цели 3 относительно оптико-электронной системы 13, так-так процесс полета цели 3 не имеет такой характеристики. Цель 3 имеет характеристики: линейную скорость V, ускорение а полета и резкость R изменения траектории полета.
Поэтому связь интервала времени Ts3 и величину отклонения цели 3 от линейно аппроксимированной траектории на величину Δ, находим из выражения для критерия наибольшего отклонения 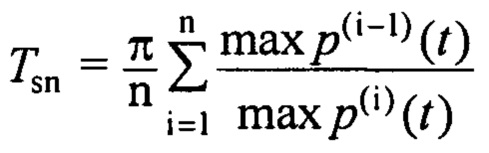 синусоидального типа. (Майоров Б.Г. Обобщенный критерий наибольшего отклонения входных сигналов систем управления // Автоматика и Телемеханика. 2005. №10. С. 148-155.; Майоров Б.Г. Исследование теоремы Котельникова и применение результатов для определения величины дискретизации по времени входных сигналов систем управления // Высокопроизводительные вычислительные системы и микропроцессоры. Сб. научных трудов ИМВС РАН 2004. Выпуск 7. С. 76-82). Можно найти работы на персональной странице автора, на портале математической сети www.mathnet.ru/rus/person62970.
синусоидального типа. (Майоров Б.Г. Обобщенный критерий наибольшего отклонения входных сигналов систем управления // Автоматика и Телемеханика. 2005. №10. С. 148-155.; Майоров Б.Г. Исследование теоремы Котельникова и применение результатов для определения величины дискретизации по времени входных сигналов систем управления // Высокопроизводительные вычислительные системы и микропроцессоры. Сб. научных трудов ИМВС РАН 2004. Выпуск 7. С. 76-82). Можно найти работы на персональной странице автора, на портале математической сети www.mathnet.ru/rus/person62970.
Величина  применима для выбора типа поражающих элементов ракеты и защиты мобильного поста воздушного наблюдения 2 с оптико-электронной системой 13 от поражения собственными ракетами.
применима для выбора типа поражающих элементов ракеты и защиты мобильного поста воздушного наблюдения 2 с оптико-электронной системой 13 от поражения собственными ракетами.
Результаты измерений и расчетов передаются через радиомодем 17, радиостанцию 19 в бортовую электронную вычислительную машину 9 зенитно-ракетного комплекса 1, расчет которого осуществляет подготовку к стрельбе и уничтожает низколетящую цель 3.
Таким образом, способ обнаружения и сопровождения низколетящих целей имеет три стадии реализации:
- радиолокационная станция 6 обнаруживает низколетящую цель 3 на границе зоны ответственности противовоздушной обороны;
- бортовая оптико-электронная система 7 сопровождает низколетящую цель 3 на дальних подступах к точке стояния зенитно-ракетного комплекса 1;
- бортовая оптико-электронная система 7 и мобильный пост воздушного наблюдения 2 с оптико-электронной системой 13 осуществляют сопровождение низколетящей цели 3 на дальних и ближних подступах к его точке стояния и точке стояния зенитно-ракетного комплекса 1 и в том числе в зонах невидимости участков местности для радиолокационной станции 6 и бортовой оптико-электронной системы 7.
Одним из важнейших условий практической реализации способа является правильный выбор или проектирование мобильных постов воздушного наблюдения 2 с оптико-электронными системами 13, к которым можно предъявить следующие технические требования:
- питание от автономного источника (аккумулятора или бензогенератора) и, как следствие ограничение по энергопотреблению;
- малые габариты и масса оптики для уменьшения инерционности оптико-электронной системы;
- дальность действия (обнаружения и сопровождения) низколетящей цели не менее 5 км для прицела оптического диапазона 12, тепловизора 13, лазерного дальномера 14;
- угол обзора 2Ω по горизонту (Г) не менее 180°;
- угол обзора 2Ω по вертикали (В) не менее 120°;
- скорость слежения за целью (Vc) не менее 60 град/с;
- ускорение слежения за целью (ac) не менее 100 град/с2;
- диапазон рабочих температур от -50°С до +50°С;
- требования к стабилизации линии визирования выполняются аппаратурой электрического квадрокоптера 14 и сервоприводом 20 оптико-электронной системы 13.
В таблице приведены характеристики современных оптико-электронных систем.
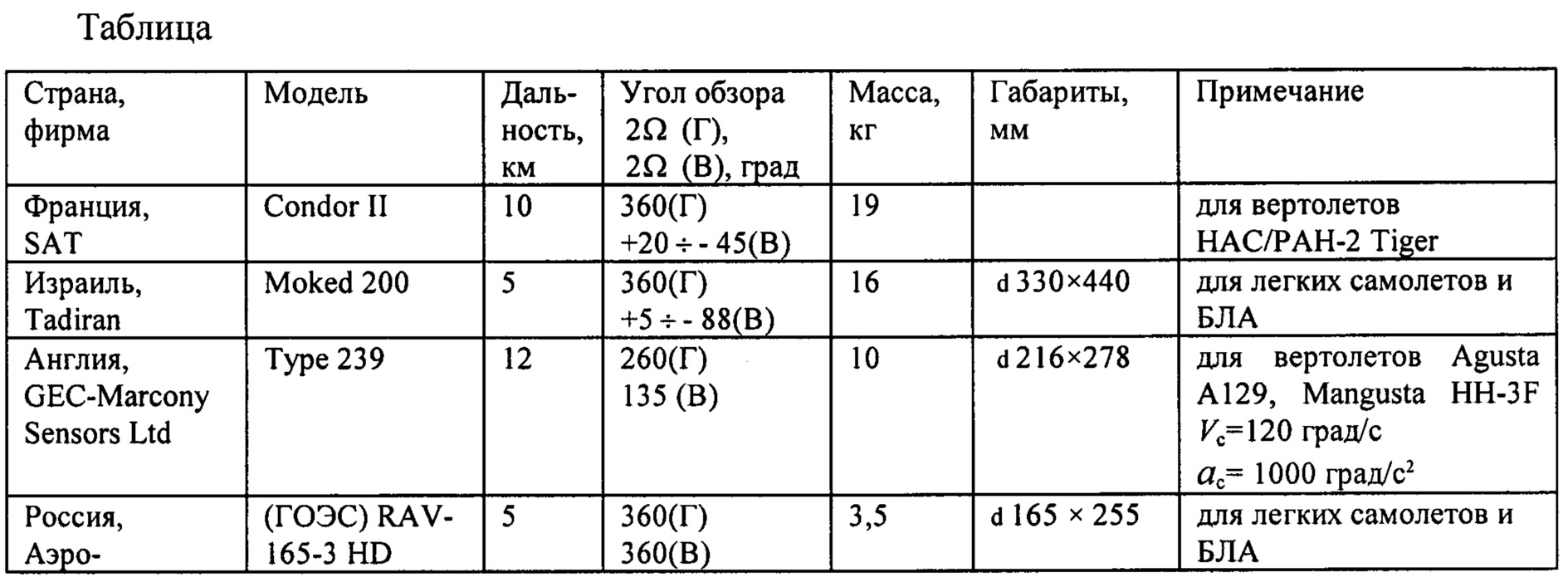

(Волков В.Г. Авиационные приборы ночного видения. Специальная техника. №3, с. 2-20. №4, с. 2-12, 2006 и сайт фирмы АэроРоботикс).
Сравнение характеристик авиационных оптико-электронных систем отечественных и зарубежных производителей показывает достойный уровень отечественных изделий по габаритам, массе и другим техническим характеристикам, что подтверждает реальность решения технической задачи обнаружения и сопровождения низколетящих, маневренных целей без использования импортных изделий. Для перемещения мобильного поста воздушного наблюдения 2 с оптико-электронной системой 13 в точки установки могут быть использован воздушный и наземный транспорт.
Таким образом, способ обнаружения и сопровождения низколетящих целей может быть практически реализован на имеющихся отечественных технических и программных средствах.
Вывод выражения для критерия наибольшего отклонения синусоидального типа
Математическое выражение, которое описывает возможное изменение величины p(t) (траектории низколетящей цели) внутри интервала дискретизации времени (между двумя соседними измерениями), названо автором траекторией наибольшего отклонения.
Условимся, что моментам времени соседних измерений соответствуют максимальные по модулю параметры траектории: Δ - амплитуда траектории, линейная скорость V, ускорение а полета и резкость R изменения траектории полета.
Уравнение синусоидальной траектории наибольшего отклонения:

где 0≤t≤Tsn, Tsn=Т/2, ω=π/Tsn, - круговая частота участка траектории p(t).
Выражение (1) описывает математически половину (Tsn=Т/2) периода T синусоиды, которая изображена на фигуре 5.
Первое измерение на траектории p(t) осуществлено в момент времени t=0, второе измерение осуществлено в момент времени t=Tsn=Т/2. Линейная аппроксимация между двумя измерениями изображена штрихпунктирной линией. Погрешность такой аппроксимации Δ достигает максимального значения в точке (0,5 Tsn, Δ), которая является вершиной траектории. Проходящая через вершину вертикальная линия t=0,5Tsn=0,25T является ее осью симметрии.
В траектории полета беспилотного вертолета невозможно определить величину частоты граничной гармоники в спектре физической величины, так как сам спектр не определим. При этом величина интервала равномерной дискретизации времени процесса явно зависит от максимальных параметров аппроксимируемой траектории полета Tsn≤F{Δ, V, a, R, …, max p{n)(t)}.
Определим шаг дискретизации времени Tsn траектории полета через максимальные параметры этой траектории, которые должны быть измерены в процессе слежения за целью 3 оптико-электронной системой 13. Для этого найдем ряд производных от выражения (1) и приравняем их соответствующим максимальным значениям параметров процесса полета (траектории) p(t) из выражения (1):
p(0)(t)=Δ sin ωt, maxp(0)(t=0,5Ts)=Δ или Δ=Δ,
p(1)(t)=Δω cosωt, maxp(1)(t=0)=Δω=V или ω=V/Δ,
p(2)(t)=-Δω2 sinωt, maxp(2)(t=0,5Ts)=-Δω2=-а или 
p(3)(t)=-Δω3 cosωt, maxp(3)(t=0)=-Δω3=-R или 
Используем метод математической индукции и запишем общую цепочку равенств: для определения круговой частоты  где (n) - порядок старшей производной по времени от синусоидальной траектории отклонения.
где (n) - порядок старшей производной по времени от синусоидальной траектории отклонения.
Из выражения круговой частоты ω запишем шаг дискретизации времени Tsi в виде цепочки равенств:  После необходимых преобразований получим:
После необходимых преобразований получим:

где 1 ≤ i ≤ n.
Выражение (2) преобразуем в необходимый обобщающий вид: запишем равенство (i-1)-го и (i)-го членов выражения (2), которое возведем в степень i(i-1). Найдем параметр Δ и подставим его в (i-1)-ый член выражения (2). После необходимых преобразований получим цепочку равенств

Из выражения (3) выделим первый член суммы при (i=1), получим искомое выражение для величины наибольшего отклонения Δ в общем виде:

Частные случаи выражений (3) и (4) запишем в виде:
при n=1, i=1, maxp(0)(t=0,5Ts)=Δ, maxp(1)(t=0)=V, имеем:

при n=2, i=1, 2, maxp(2)(t=0,5Ts)=а, имеем:

при n=3, i=1, 2, 3, maxp(3)(t=Ts)=R, имеем:

От числа (1 ≤ n ≤ 3) известных производных от траектории цели, их величин и величины наибольшего отклонения Δ траектории низколетящей цели от участка линейной аппроксимации траектории зависит величина интервала дискретизации времени (между двумя соседними измерениями) Tsn в соответствии с выражениями (5)-(7).
Таким образом, получены частные случаи (5)-(7) синусоидального критерия наибольшего отклонения в общем виде (3)-(4) с учетом от одного до трех измеренных максимальных значений параметров процесса полета цели (1).
В качестве примера определим величину наибольшего отклонения Δ беспилотного вертолета от его траектории аппроксимируемой электронной вычислительной машиной 16. Цель летит в зоне обнаружения оптико-электронной системы 13 с крейсерской скоростью V=180 км/час=50 м/с, величина интервала дискретизации времени Tsn определяется в основном тактико-техническими характеристиками оптико-электронной системы 13 и равна Tsn = 0,628 с. В процессе сопровождения цели ее скорость V остается постоянной, модель цели является неизвестной (отсутствует в базе данных целей), ускорение а полета и резкость R изменения траектории полета не известны и не измерены, поэтому расчет ведется по формуле (5): Δ=9,995 м.
Цель в зоне обнаружения оптико-электронной системой 13 резко увеличила скорость с 50 м/с до 61 м/с, поэтому были определены: ускорение полета а=280 м/с2 и резкость изменения траектории полета R=1600 м/с3. В этом случае расчет ведется по формуле (7): Δ=12,617 м.
Из полученных результатов следует, что цель необходимо поражать зарядом с разлетом поражающих элементов не менее 20 м, поражение цели должно происходить за несколько секунд до пролета или после пролета целью оптико-электронной системы 13 для предотвращения поражения этой системы собственной ракетой.
Промышленная применимость
Предложенный способ обнаружения и сопровождения низколетящих целей на дальних подступах к точке стояния зенитно-ракетного комплекса обеспечивает скрытность работы радиолокационных станций, уменьшает количество мобильных постов воздушного наблюдения, уменьшает инерцию сервоприводов оптико-электронных систем, за счет уменьшения массы оптики, оперативного изменения высоты расположения оптико-электронных систем при помощи сочлененных с ними электрических квадрокоптеров, которые поднимают их над возвышенностями, берегами и руслами рек, оврагами, препятствующими обнаружению низколетящей цели при помощи радиолокационной станции и бортовой оптико-электронной системы зенитно-ракетного комплекса. Для предотвращения «дружественного огня» определяют величину наибольшего отклонения Δ цели от его аппроксимируемой траектории.
Способ может быть эффективно применен для борьбы с низколетящими боевыми, беспилотными вертолетами, предназначенными для уничтожения самих зенитно-ракетных комплексов.
Трехмерный адаптивный α-β фильтр
Способ непрерывной оптической связи с низколетящей целью
Способ определения координат подвижного объекта в закрытых помещениях
Способ непрерывной оптической связи с низколетящей целью

