Результат интеллектуальной деятельности: ТРЕХМЕРНЫЙ АДАПТИВНЫЙ α-β ФИЛЬТР
Вид РИД
Изобретение
Область техники
Изобретение относится к вторичной обработке радиолокационных сигналов, и может быть использовано в автоматизированных системах управления воздушным движением, а также в системах управления и средствах ПВО.
Уровень техники
Известен фильтр «скользящего» сглаживания параметров траектории с фиксированными коэффициентами сглаживания координат α и скоростей β (Л1. С.З. Кузьмин. Основы теории цифровой обработки радиолокационной информации, Москва, «Советское радио», 1974 г., с. 382-391).
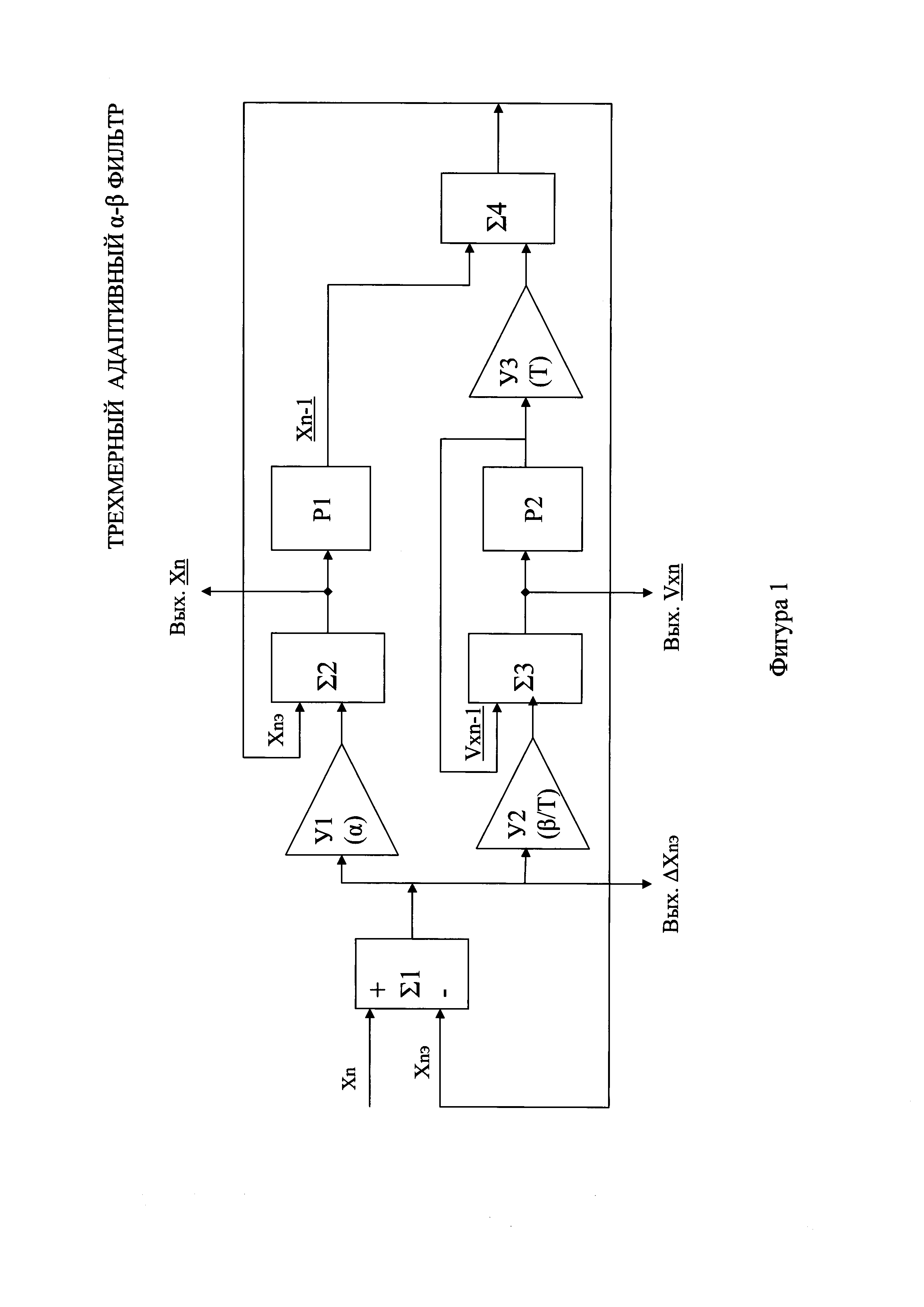
Фильтр «скользящего» сглаживания представляет собой следящую систему, построенную на базе α-β фильтра. Схема этого фильтра в пространстве одного измерения (Фигура 1) содержит входной сумматор Σ1, на первый вход которого поступает измеренная координата цели в системе координат сопровождения, как правило, в прямоугольной системе координат (Хn). На второй вход сумматора подается координата экстраполированного фильтром положения трассы. С выхода сумматора на входы каналов сглаживания координат и скоростей поступает разность ΔХnэ измеренной координаты Хn и координаты экстраполированной точки Хnэ, которую принято называть обновляющей последовательностью.
В канале сглаживания координат разность ΔХnэ умножается масштабирующим устройством У1 на коэффициент α и суммируется в сумматоре Σ2 с координатой экстраполированной точки Хnэ. Полученное в результате сглаженное значение Хn поступает на выход фильтра и запоминается в регистре Р1 для использования при приходе очередной измеренной координаты в качестве сглаженного значения координаты на предыдущем шаге ΔХn-1. (Здесь и далее по тексту подчеркиванием выделяются сглаженные параметры.)
В канале сглаживания скорости ΔХnэ умножается устройством У2 на величину β/Т (Т - период обновления входных координат) и складывается в сумматоре Σ3 со значением сглаженной скорости Vхn-1, вычисленной при предыдущем обновлении входных координат. В результате перечисленных операций получается сглаженное значение скорости Vхn, которое выдается на выход фильтра и запоминается в регистре Р2 для использования при очередном обновлении в качестве Vхn-1.
Экстраполированная координата Хnэ получается путем сложения Хn-1 в сумматоре Σ4 со скоростью Vхn-1, умноженной устройством масштабирования У3 на величину периода обновления Т.
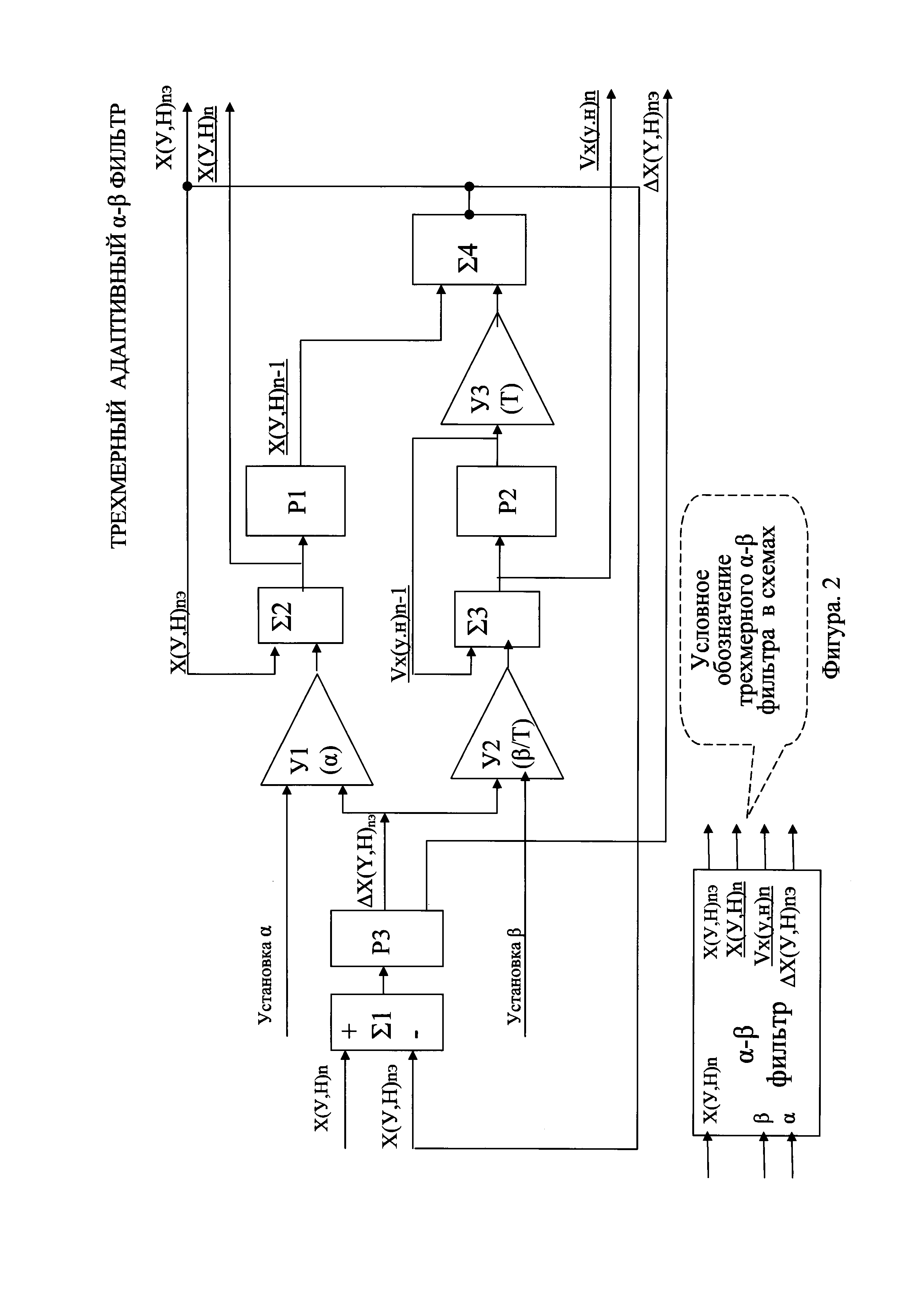
В пространстве трех измерений может применяться три идентичных фильтра для сопровождения по каждой координате или последовательное сглаживание координат в одном фильтре, позволяющее сократить необходимые ресурсы для реализации трехмерного фильтра. Схема трехмерного фильтра «скользящего» сглаживания, работающего в последовательном режиме, изображена на чертеже Фигура. 2. В этом случае в регистре Р1 предусматриваются ячейки для запоминания всех трех сглаженных координат Хn, Уn, Нn, а в регистре Р2 для запоминания трех составляющих скоростей цели Vхn, Vхn, Vхn, и в разрыв цепи между сумматором Σ1 и устройствами У1 и У2 вводится дополнительный регистр Р3 с ячейками для хранения отклонений ΔХnэ, ΔУnэ, ΔНnэ. Работа фильтра начинается с вычислений и запоминания всех отклонений измеренных координат от экстраполированной точки (ΔХnэ, ΔУnэ, ΔНnэ), а затем из регистра Р3 последовательно выбираются записанные в них отклонения и проводится сглаживание координат и скоростей для каждой составляющей трехмерного пространства. Учитывая, что работа и свойства такого фильтра подробно изучены и известны специалистам, в последующих схемах будет использоваться его условное обозначение, изображенное на фигуре 2.
Фильтр «скользящего» сглаживания, являясь упрощенной разновидностью фильтра Калмана, для реализации требует меньше аппаратных и/или программных ресурсов, чем полные версии фильтра Калмана, и поэтому достаточно часто применяется на практике.
Основной недостаток этого фильтра - применение фиксированных коэффициентов сглаживания - приводит к противоречивости требований к выбору их величин. Для эффективного сглаживания на участках движения цели, близких к прямолинейным (при малых ускорениях маневра), величины коэффициентов сглаживания должны быть малыми, а на участках интенсивного маневра для уменьшения динамического запаздывания большими. Поэтому для сопровождения интенсивно маневрирующих целей используются адаптивные фильтры, определяющие и реализующие необходимость изменения коэффициентов сглаживания в зависимости от характера движения цели (прямолинейное движение или маневр).
Известен способ фильтрации параметров траектории объекта и устройство для его реализации (Патент РФ 2408027, опубликован 27.12.2010). В устройстве применен способ, при котором адаптация параметров фильтра к текущим условиям достигается за счет измерения абсолютных величин отклонений сглаженного значения координаты от ее экстраполированного значения, сглаженного значения скорости изменения координаты от ее экстраполированного значения, сглаженного значения ускорения координаты от ее предыдущего сглаженного значения, а также за счет использования «сигналов ошибок» сглаженных координат скорости и ускорения. Указанные отклонения используются при каждом измерении для вычисления коэффициентов сглаживания α, β и γ по формулам (15), (16), (17), (18), (19), приведенным в описании изобретения. Полученные коэффициенты используют для сглаживания при следующем измерении. В результате уменьшаются ошибки фильтрации параметров траектории объектов, маневрирующих по закону, отличному от квадратичного и упрощается процесс оценки параметров за счет отказа от преобразования координат и фильтрации координат объекта в полярной системе координат.
В таком устройстве недостатки свойственные сопровождению в полярных координатах полностью не устраняются. В полной мере эффективность будет проявляться при сопровождении маневрирующих объектов, генеральный курс которых пересекает точку стояния РЛС. Для целей, летящих с курсовым параметром, по мере приближения эффективность уменьшается за счет «кажущегося ускорения», и в ближней зоне даже при прямолинейном движении качество сопровождения становится ниже, чем у фильтров, сопровождающих цели в прямоугольных координатах. Следует также отметить, что, во-первых, большинство задач в системах управления ПВО решается в прямоугольных координатах и преобразование координат при этом неизбежно, а во-вторых, заявляемое устройство базируется на α-β фильтре, а не α-β-γ фильтре.
В известном способе сопровождения маневрирующей воздушной цели (Патент РФ 2048684, опубликован 20.11.1995), заключающемся в сглаживании траектории с помощью α-β фильтра на участках прямолинейного движения с коэффициентами α и β, обусловленными шумом состояния цели, и изменении коэффициентов на участках маневра цели, отличающийся тем, что в момент вхождения на участок траектории, на котором по априорной информации о траекторных особенностях цели возможен маневр, сглаживают сигнал пеленга цели с коэффициентом усиления фильтра, установленным в соответствии с накопленной вероятностью маневра.
Возможность применения этого способа ограничена узким кругом решаемых задач, т.к. в общем случае участки маневра априорно не известны. Корме того, адаптация в этом способе предусмотрена только для одной из координат (пеленга цели).
Известен метод адаптации α-β фильтра к маневру, изложенный в монографии авторов А. Фарина Ф. Студер (Л2. А. Фарина, Ф. Студер. Цифровая обработка радиолокационной информации. Сопровождение целей. «Радио и связь», Москва, 1993, стр. 182.). Для адаптации к маневру предлагается формирование узкого (внутреннего) и широкого (внешнего) стробов в экстраполированной точке. Для каждого строба выбирается своя пара фиксированных коэффициентов α и β. Если отметка от цели попадает во внутренний строб, то α и β устанавливаются небольшими. Если отметка не попадает во внутренний строб, но попадает во внешний, то значения коэффициентов сглаживания устанавливаются увеличенными.
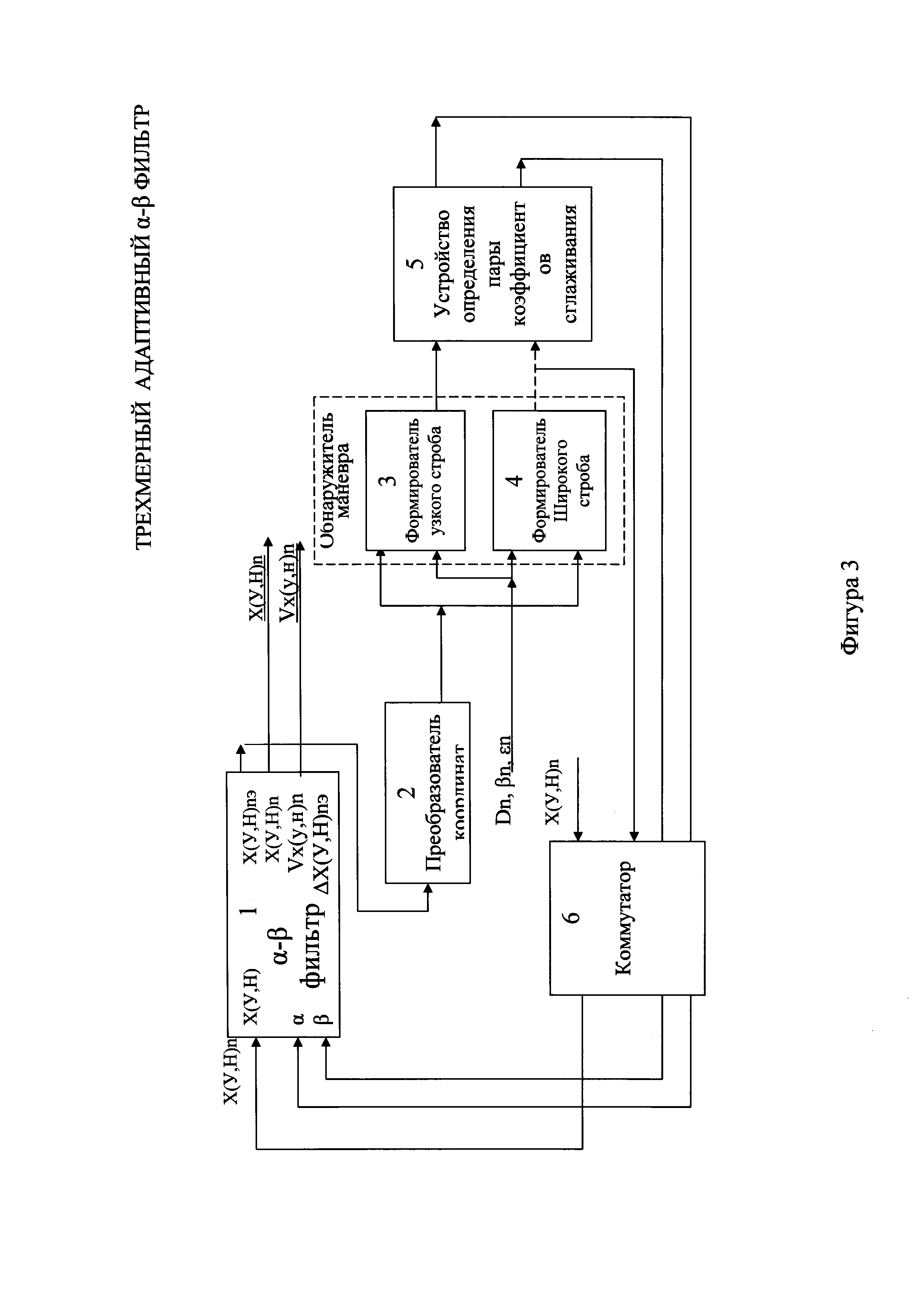
Функциональная схема такого устройства должна включать (Фигура 3):
- трехмерный α-β фильтр 1 с внешним управлением величиной коэффициентов сглаживания;
- преобразователь 2 экстраполированных координат из области состояний в область измерений, обеспечивающий возможность формирования сферических стробов;
- обнаружитель маневра, состоящий из двух устройств стробирования с узким 3 и широким стробом 4;
- управляемое обнаружителем маневра логическое устройство 5, определяющее пару коэффициентов сглаживания;
- коммутатор 6, подключающий координаты отметки и коэффициенты сглаживания к фильтру при попадании отметки в широкий строб.
Устройство, реализующее рассмотренный в Л2 способ адаптации α-β фильтра к маневру, не имеет ограничений, связанных с необходимостью априорных знаний об участках маневра, предусматривает возможность трехмерного сопровождения в прямоугольных координатах и по большинству общих существенных признаков является наиболее близким аналогом.
В наиболее близком аналоге сохраняется свойственное α-β фильтру смещение оценок координат, скоростей и экстраполированного положения при маневре цели. Это приводит к ухудшению характеристик сопровождения.
Размер внутреннего строба, определяющий порог обнаружения маневра и соответственно, уровень ложных тревог обнаружения маневра, должен многократно превышать с.к.о. погрешностей измерения. Иначе увеличивается вероятность преодоления порога за счет случайной погрешности измерения, т.е. повышается вероятность ложного определения маневра и увеличения коэффициентов сглаживания, что приводит к ухудшению среднестатистических характеристик сопровождения на прямолинейном участке.
Раскрытие изобретения
Сущность изобретения как технического решения
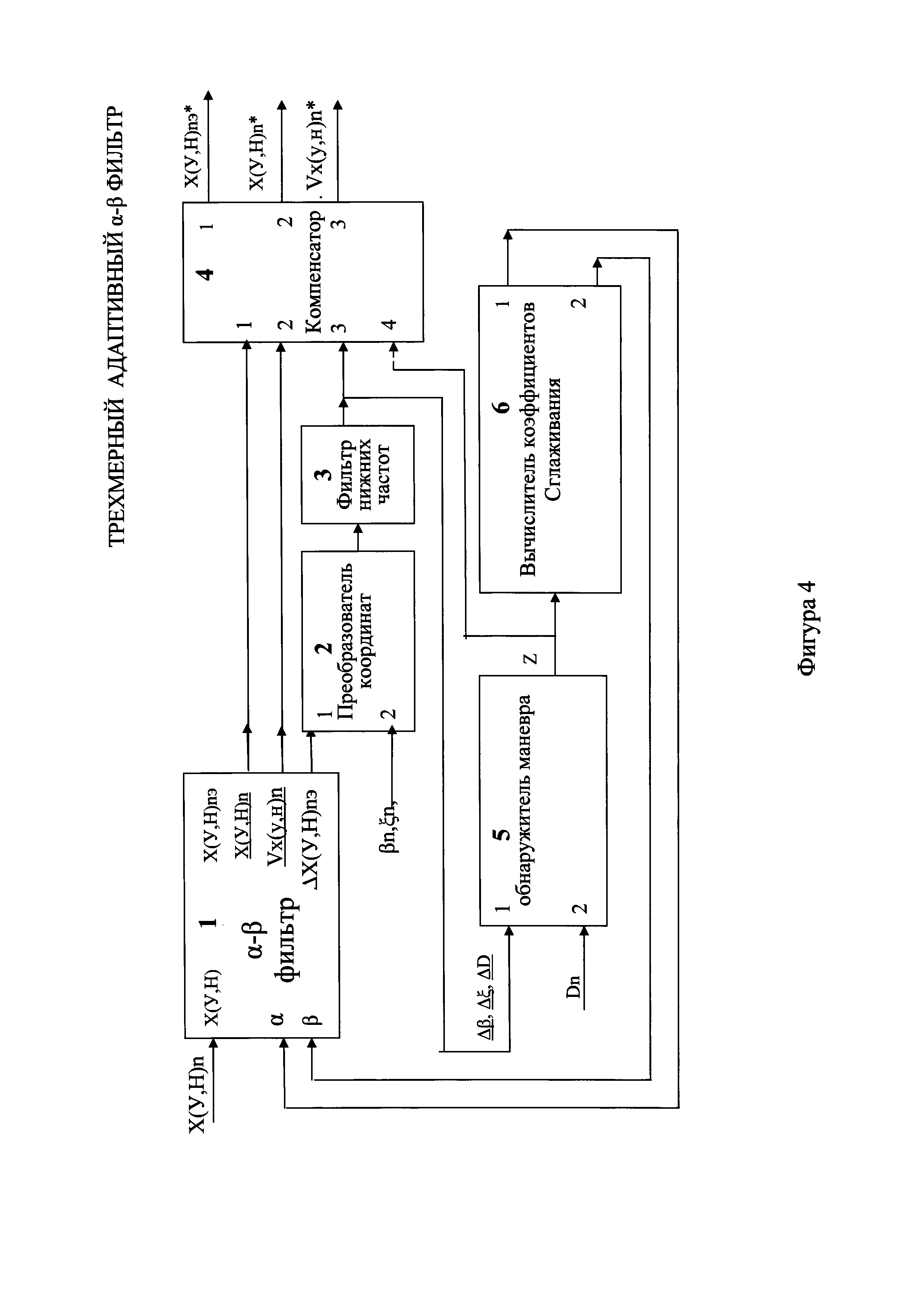
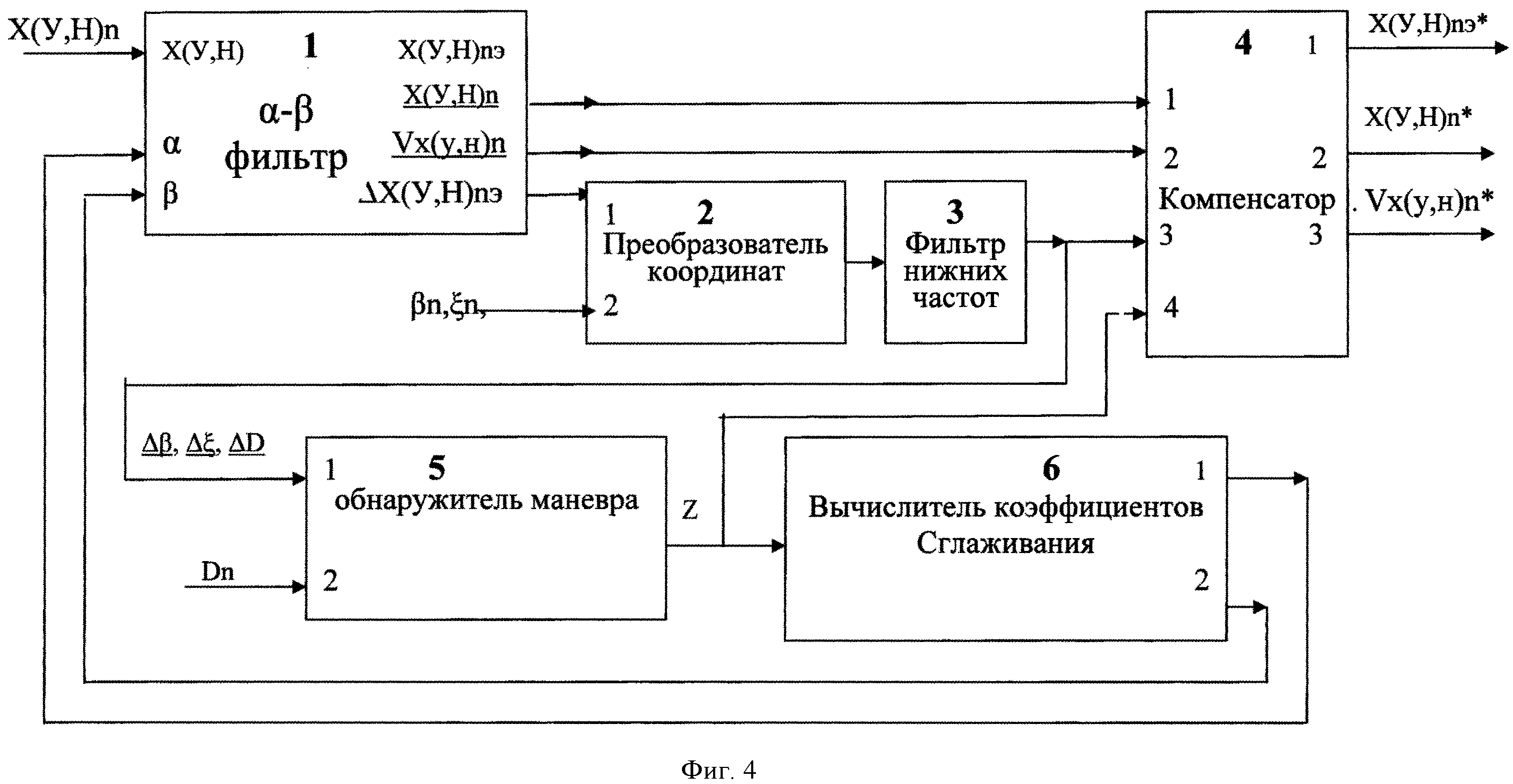
Общими для предлагаемого устройства и прототипа признаками необходимыми для адаптации α-β фильтра к маневру является наличие в составе (Фигура 4):
- трехмерного α-β фильтра 1;
- обнаружителя маневра 5;
- устройства 6, определяющего величины коэффициентов сглаживания по результатам работы обнаружителя маневра.
Существенными признаками, отличающими предлагаемое устройство от прототипа, являются:
- включение в состав устройства компенсатора смещения в оценках координат, скорости и экстраполированного положения 4;
- включение в состав устройства преобразователя координат 2 обновляющей последовательности из области состояний в прямоугольную связанную с объектом измерений систему координат (центр связан с отметкой от цели, ось D направлена вдоль оси визирования, ось В перпендикуляра оси визирования в горизонтальной плоскости и направлена в сторону увеличения азимута, ось ξ перпендикулярна оси визирования в вертикальной плоскости и направлена в сторону увеличения угла места, далее по тексту «прямоугольная связанная система координат»)
- включение в состав устройства фильтра нижних частот 3, подключенного к выходу преобразователя координат вектора обновляющей последовательности;
- конструктивные отличия обнаружителя маневра, предусматривающие обнаружение маневра по положению сглаженного фильтром нижних частот вектора обновляющей последовательности относительно границ порогового эллипсоида в связанной системе координат;
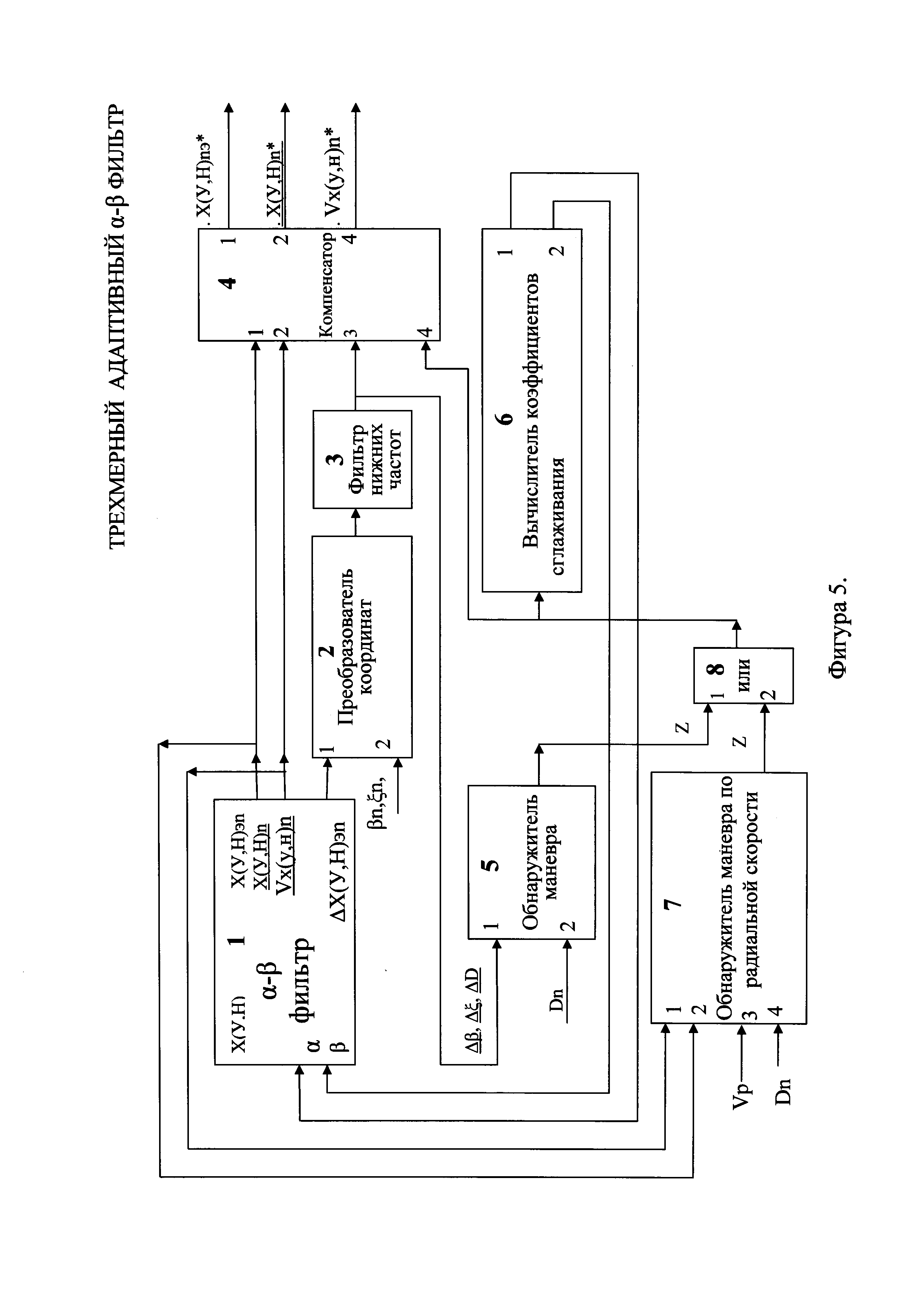
- при наличии радиальной скорости в составе характеристик отметки, введение в состав устройства второго канала обнаружителя маневра (фигура 5, обнаружитель 7 и схема ИЛИ 8), использующего отношение квадрата разности фактической и предсказанной радиальной скорости к порогу, зависящему от с.к.о. погрешностей измерения радиальной скорости.
Технический результат
1. Уменьшение погрешностей сопровождения по координатам и скорости на прямолинейных участках движения цели и участках маневра, в том числе, при сложных маневрах цели с переменными во времени по величине и направлению в пространстве трех измерений центростремительными ускорениями с одновременным воздействием изменяющихся курсовых ускорений.
2. Предлагаемый фильтр обеспечивает характеристики сопровождения сопоставимые с характеристиками адаптивных калмановских фильтров второго порядка при меньших вычислительных ресурсах, необходимых для реализации.
Технические результаты обеспечиваются за счет:
- компенсации динамического отставания;
- уменьшения ложных тревог при обнаружении маневра за счет сглаживания вектора обновляющей последовательности фильтром НЧ в прямоугольной связанной системе координат
- повышения чувствительности обнаружителя маневра, обусловленной сглаживанием обновляющей последовательности фильтром НЧ, повышающим в сглаженном векторе обновляющей последовательности отношение динамической погрешности к случайной составляющей от погрешностей измерения при маневре цели;
- конструкции обнаружителя маневра, позволяющей управлять коэффициентами сглаживания с учетом вероятности и интенсивности маневра.
- улучшения чувствительности определения маневра на предельных дальностях при введении второго канала, т.к. погрешности измерения радиальной скорости практически не зависят от дальности цели.
Перечень чертежей
Фигура 1. Схема фильтра «скользящего» сглаживания.
Фигура 2. Схема трехмерного фильтра «скользящего» сглаживания
Фигура 3. Схема прототипа.
Фигура 4. Функциональная схема трехмерного адаптивного α-β фильтра.
Фигура 5. Схема трехмерного адаптивного α-β фильтра с дополнительным каналом обнаружения маневра по радиальной скорости.
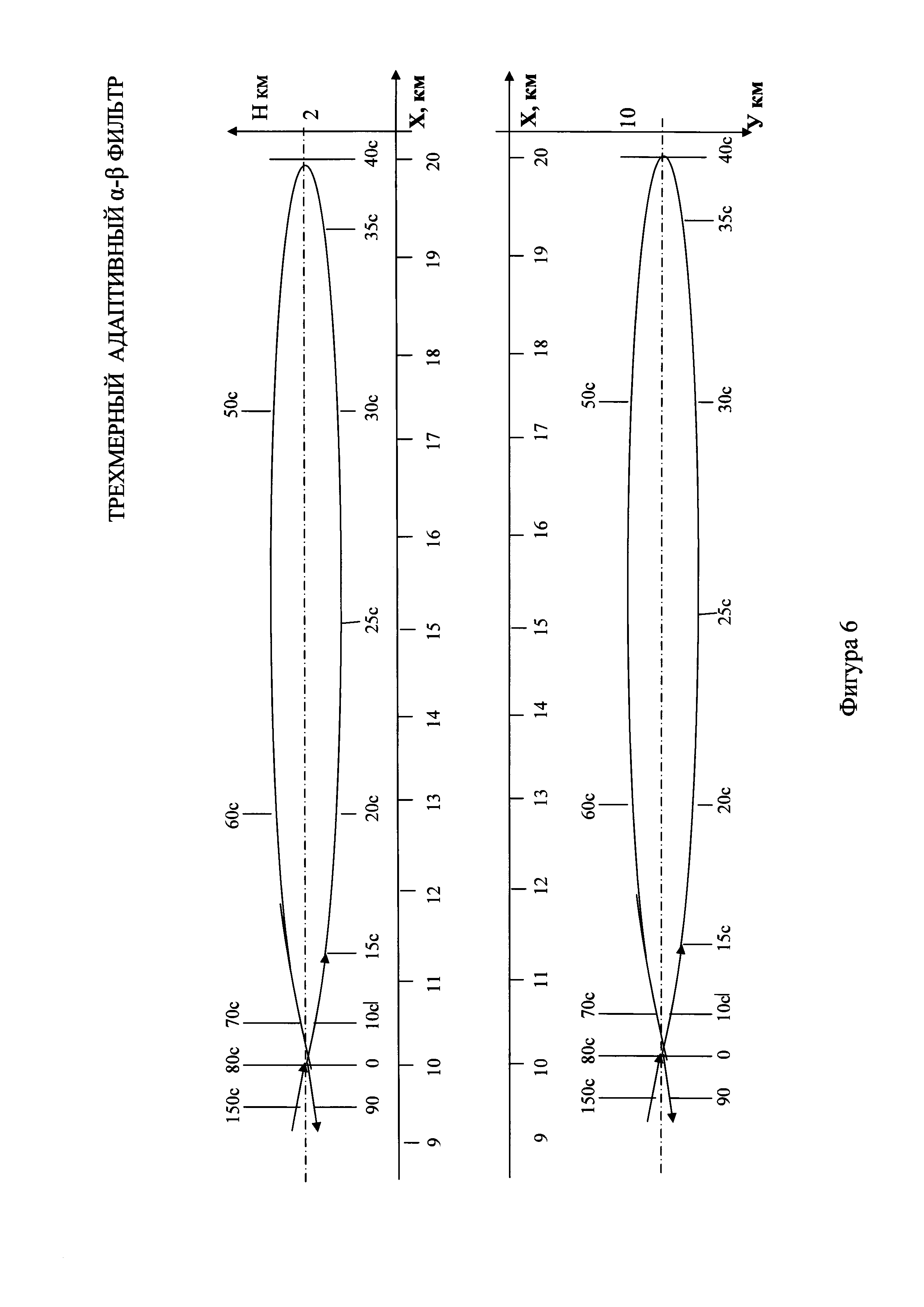
Фигура 6. Фрагмент траектории.
На фигуре изображены проекции на вертикальную и горизонтальную плоскости половины траектории, которая использовалась при моделировании для сравнения характеристик трехмерного адаптивного фильтра и прототипа. Вторая половина проекций траектории является зеркальным отражением первой половины относительно осей, параллельных осям системы прямоугольных координат и проходящих через исходную точку. Для наглядного представления о действующих ускорениях на траектории поставлены временные метки, соответствующие положению цели в процессе движения. Отсчет времени идет от начала движения из исходной точки с координатами Х=У=10 км, Н=2 км. Математическое описание траектории и условия проведения экспериментов приведены в тексте заявки при описании проверки фильтров методом моделирования.
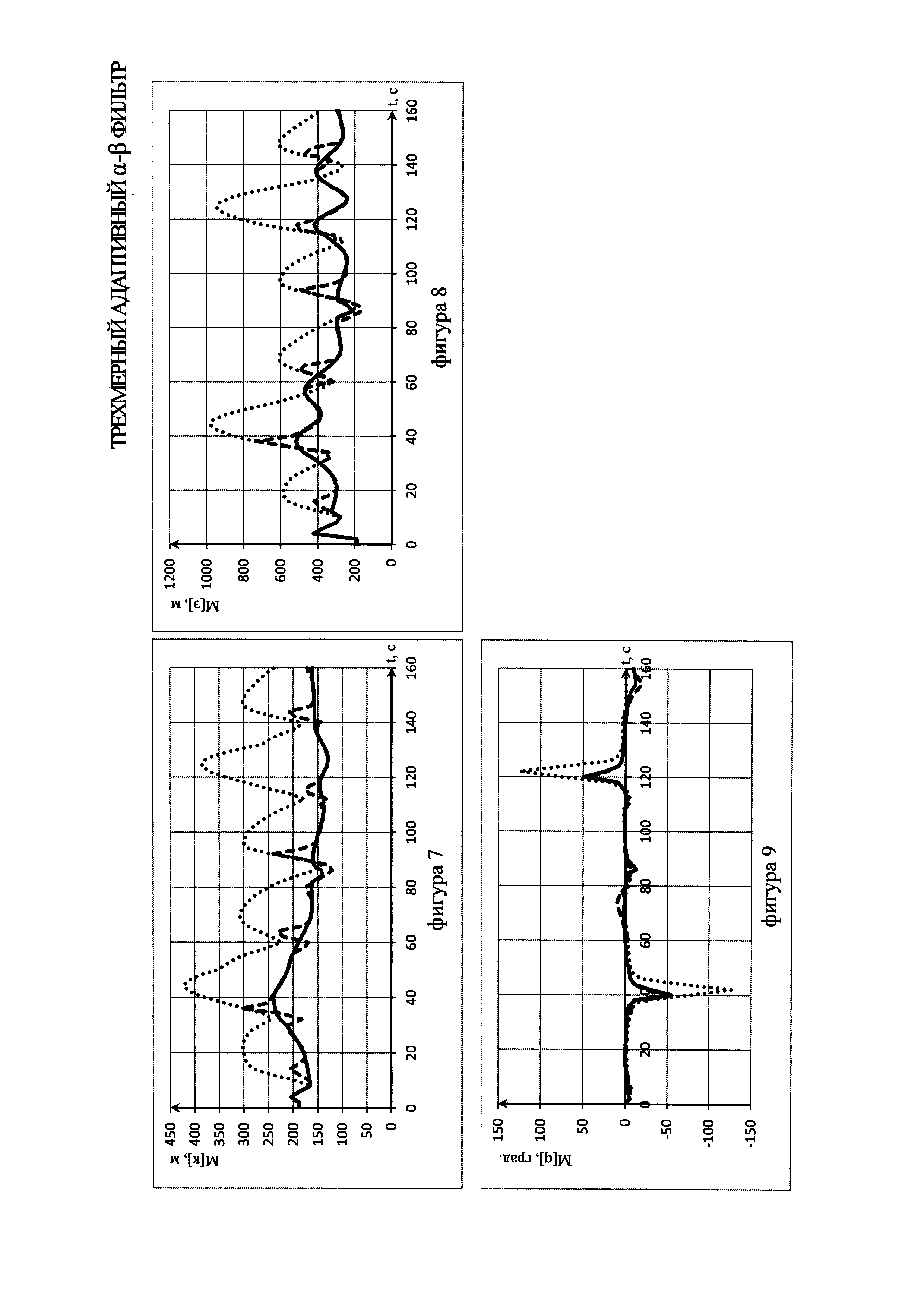
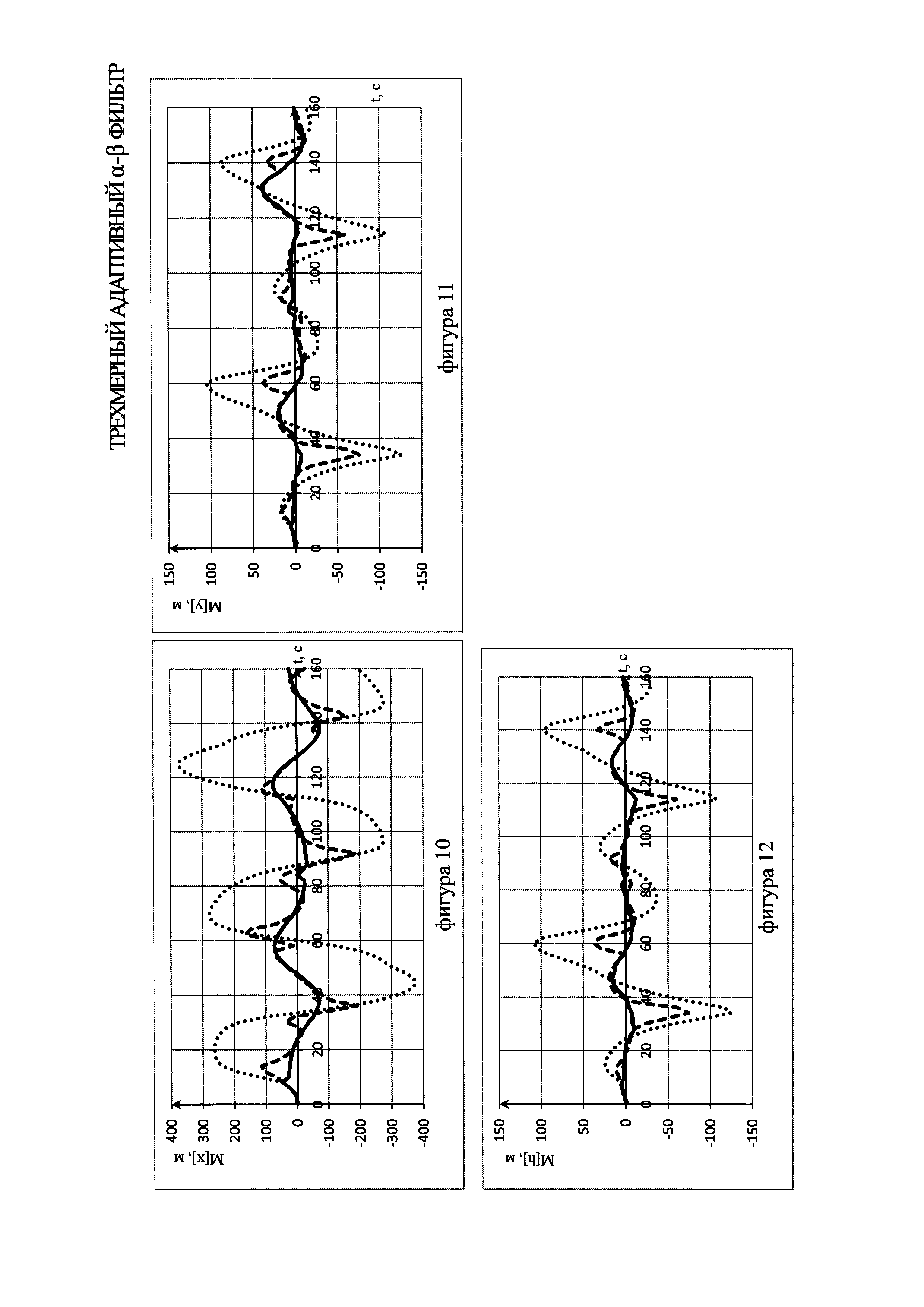
На Фигурах 7-12 приведены результаты измерения характеристик трехмерного адаптивного α-β фильтра и прототипа на траектории изображенной на Фигуре 6. На фигурах 7-12 характеристики прототипа изображены линиями, составленными из точек. Характеристики предлагаемого фильтра с обнаружителем маневра без использования радиальной скорости изображены пунктирными линиями. Характеристики предлагаемого фильтра с использованием обнаружителя по радиальной скорости изображены сплошными линиями. Формулы, по которым оценивались характеристики фильтров, приведены в тексте заявки при описании проверок методом моделирования.
На фигуре 7 приведены результаты измерения статистического среднего случайной величины полного отклонения в пространстве положения сглаженной трассы от положения истинной траектории цели.
На фигуре 8. приведены результаты измерения статистического среднего случайной величины полного отклонения в пространстве экстраполированных положений предлагаемого фильтра и прототипа от положения истинной траектории цели.
На фигуре 9 приведены результаты измерения статистического среднего случайной величины отклонения курса у предлагаемого фильтра и прототипа от истинного курса цели.
На фигуре 10 приведены результаты измерения статистического среднего случайной величины отклонения сглаженной координаты X от истинной координаты X цели у предлагаемого фильтра и прототипа.
На фигуре 11 приведены результаты измерения статистического среднего случайной величины отклонения сглаженной координаты У от истинной координаты У цели у предлагаемого фильтра и прототипа.
На фигуре 12 приведены результаты измерения статистического среднего случайной величины отклонения сглаженной координаты Н от истинной координаты Н цели у предлагаемого фильтра и прототипа.
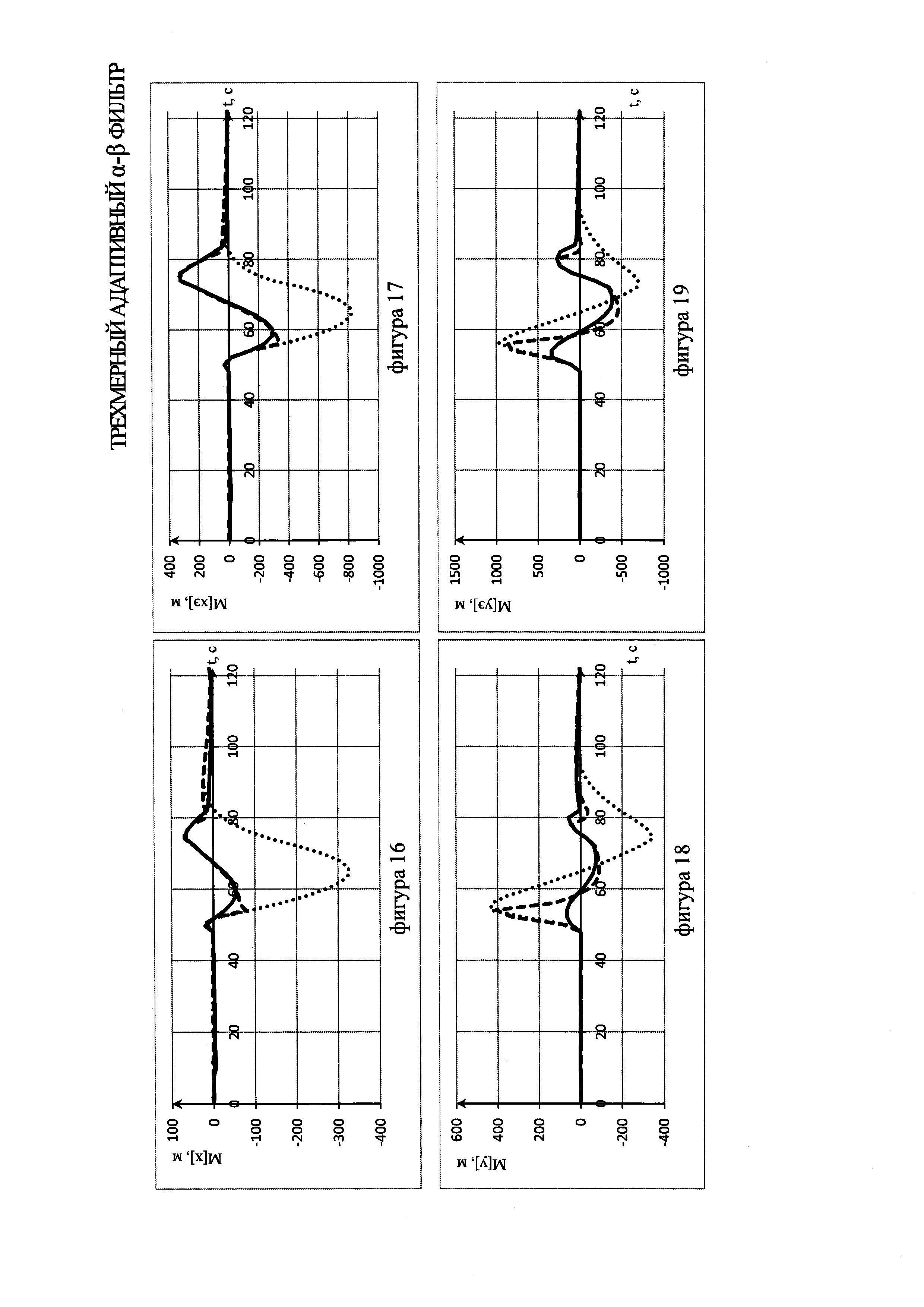
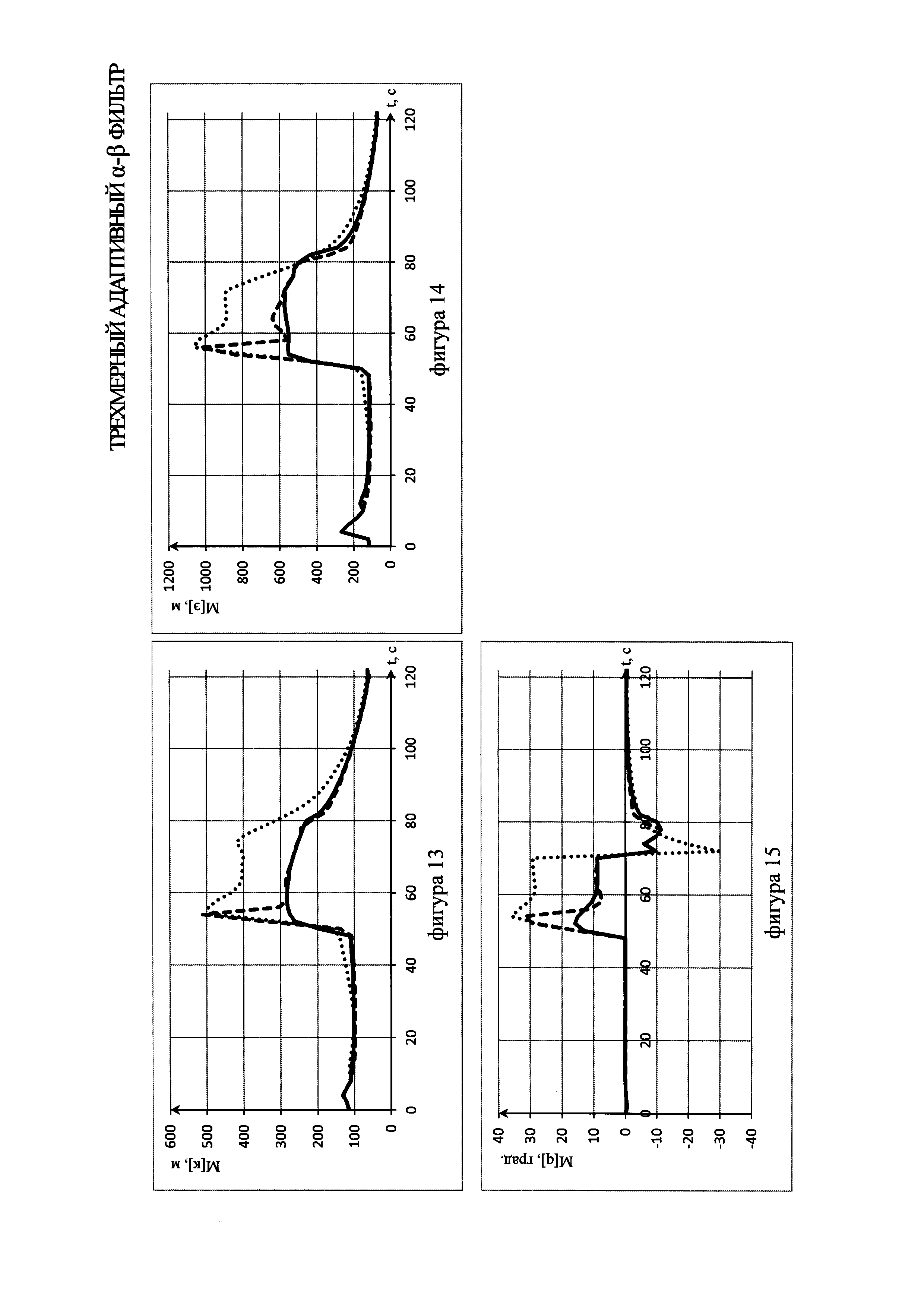
На Фигурах 13-19 приведены результаты измерения характеристик трехмерного адаптивного α-β фильтра и прототипа на траектории состоящей из прямолинейного движении на удаление, разворота на 180°, прямолинейного движения на сближение. Характер линий для отображения характеристик фильтров такой, как на фигурах 7-11. Условия, при которых проводились измерения, приведены в тексте заявки при описании проверок методом моделирования.
На фигуре 13 приведены результаты измерения статистического среднего случайной величины полного отклонения в пространстве положения сглаженной трассы от положения истинной траектории цели.
На фигуре 14 приведены результаты измерения статистического среднего случайной величины полного отклонения в пространстве экстраполированных положений предлагаемого фильтра и прототипа от положения истинной траектории цели.
На фигуре 15 приведены результаты измерения статистического среднего случайной величины отклонения курса у предлагаемого фильтра и прототипа от истинного курса цели.
На фигуре 16 приведены результаты измерения статистического среднего случайной величины отклонения сглаженной координаты X от истинной координаты X цели у предлагаемого фильтра и прототипа.
На фигуре 17 приведены результаты измерения статистического среднего случайной величины отклонения экстраполированной координаты X от истинной координаты X цели у предлагаемого фильтра и прототипа.
На фигуре 18 приведены результаты измерения статистического среднего случайной величины отклонения сглаженной координаты У от истинной координаты У цели у предлагаемого фильтра и прототипа.
На фигуре 19 приведены результаты измерения статистического среднего случайной величины отклонения экстраполированной координаты У от истинной координаты У цели у предлагаемого фильтра и прототипа.
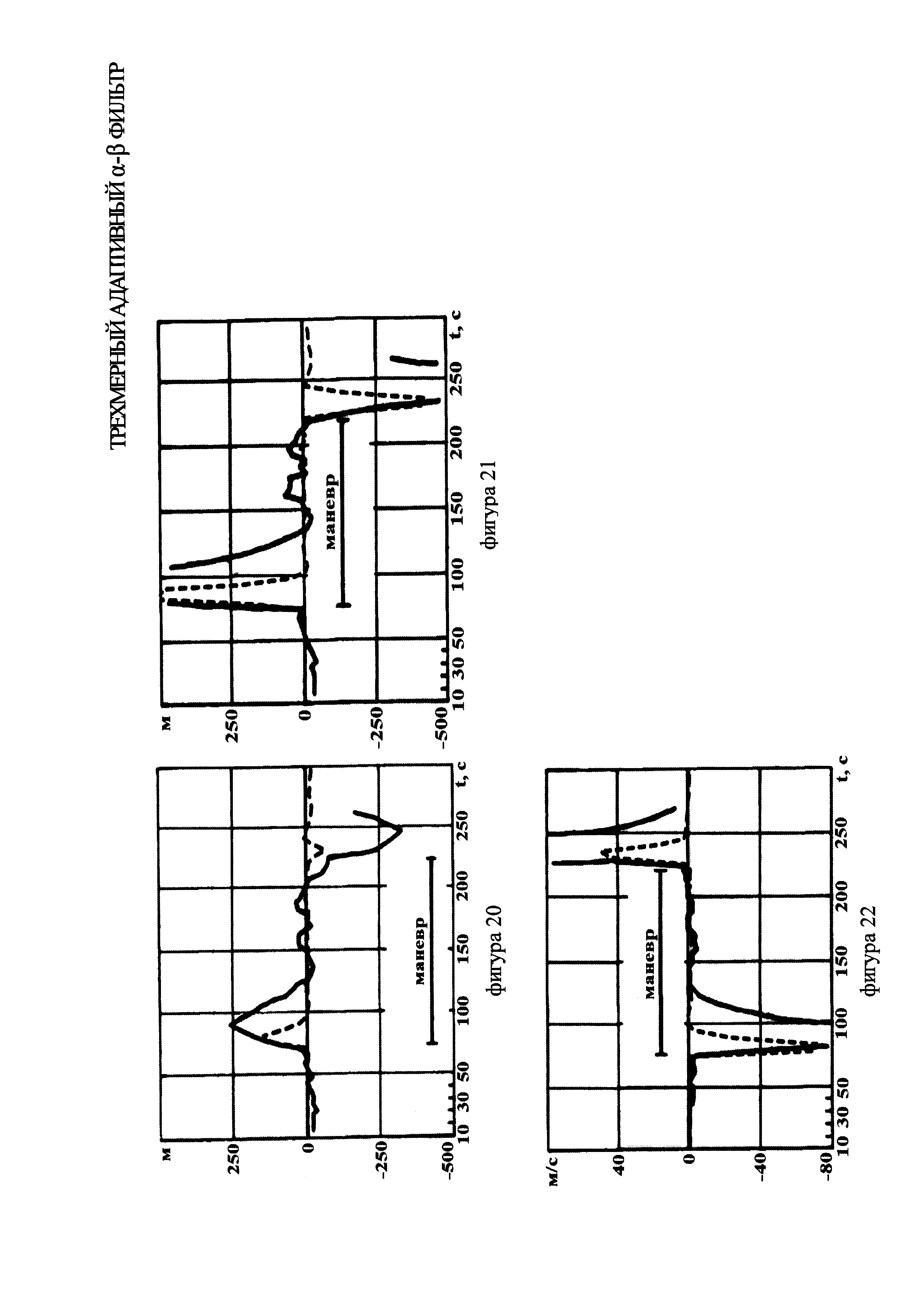
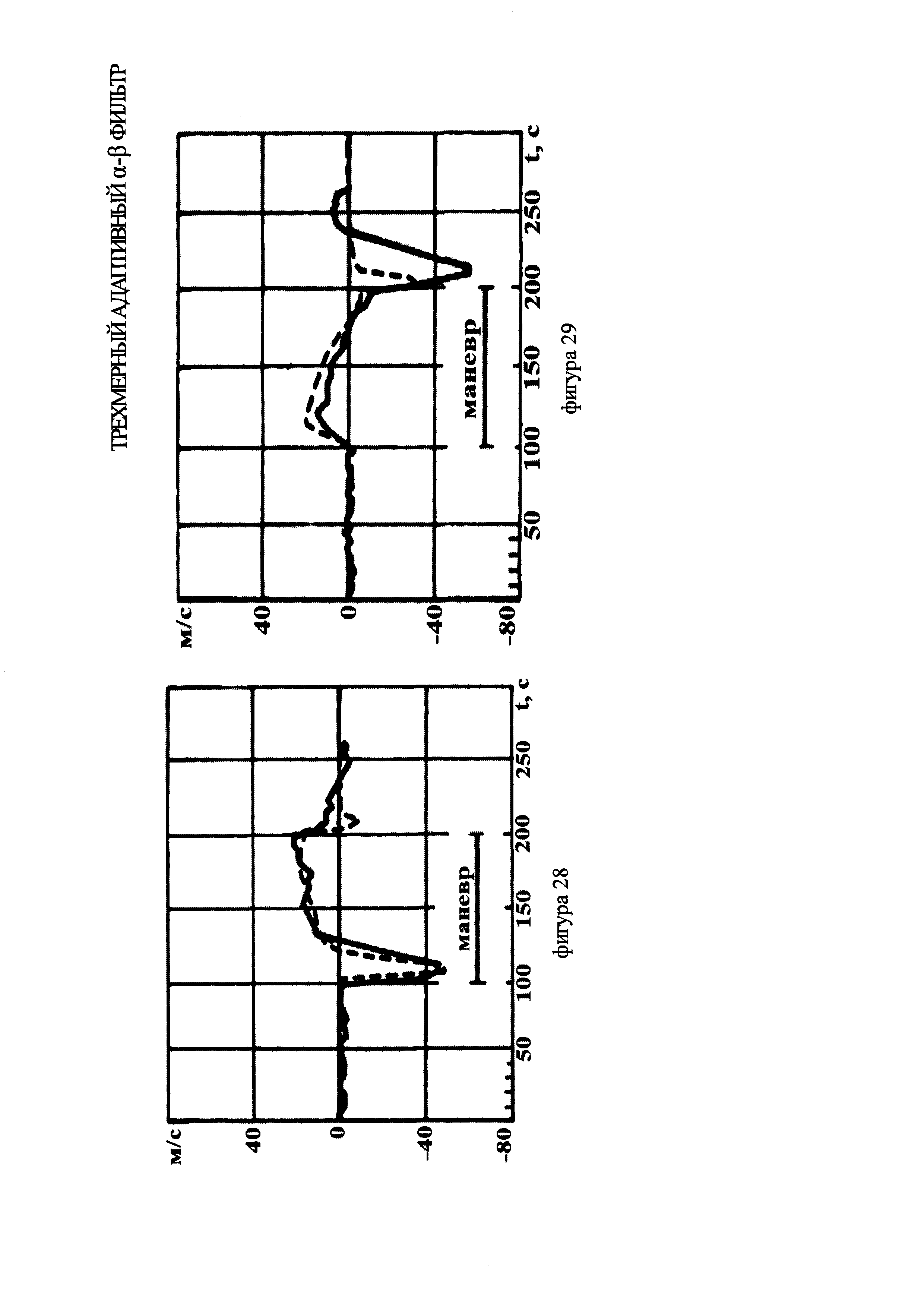
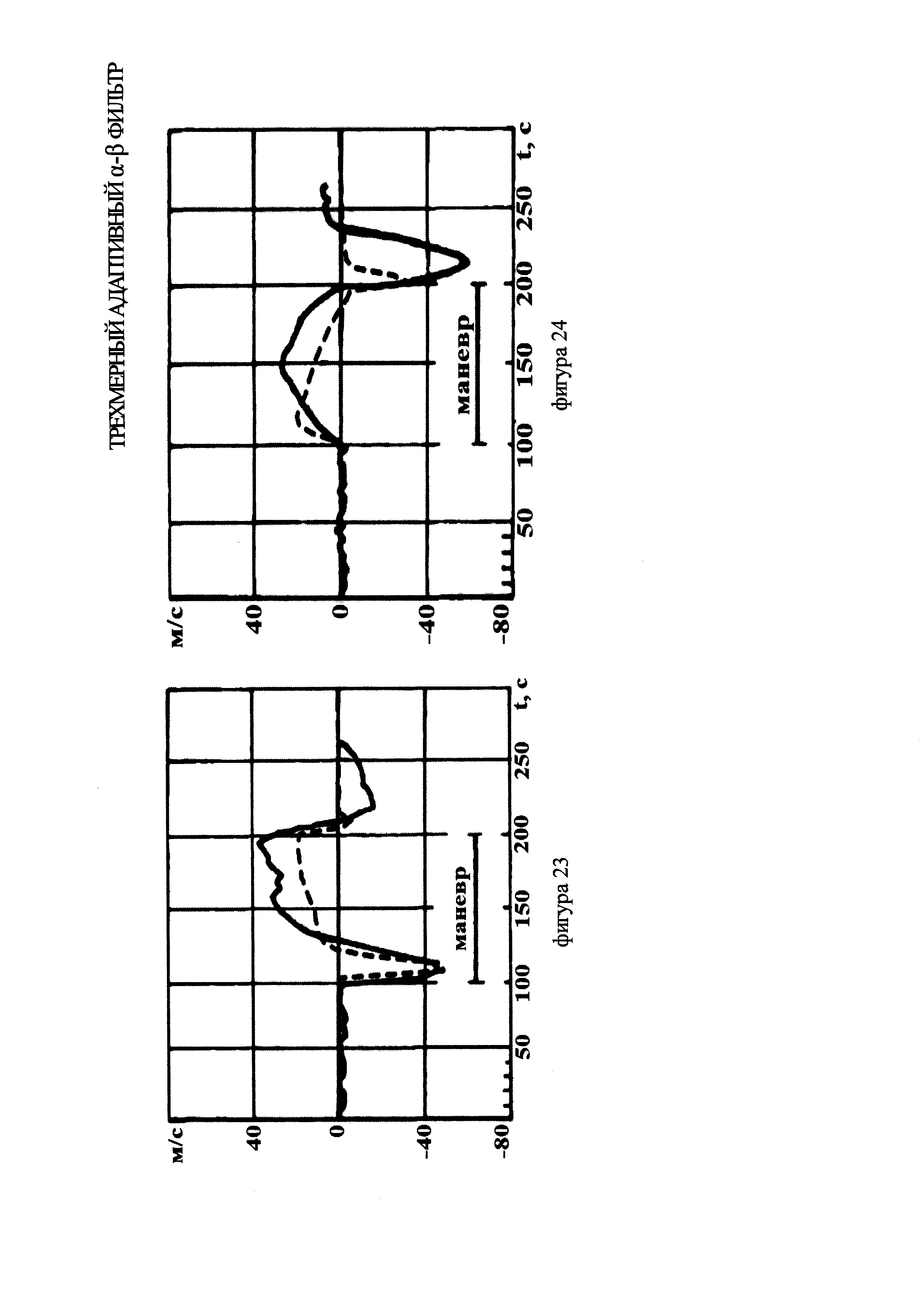
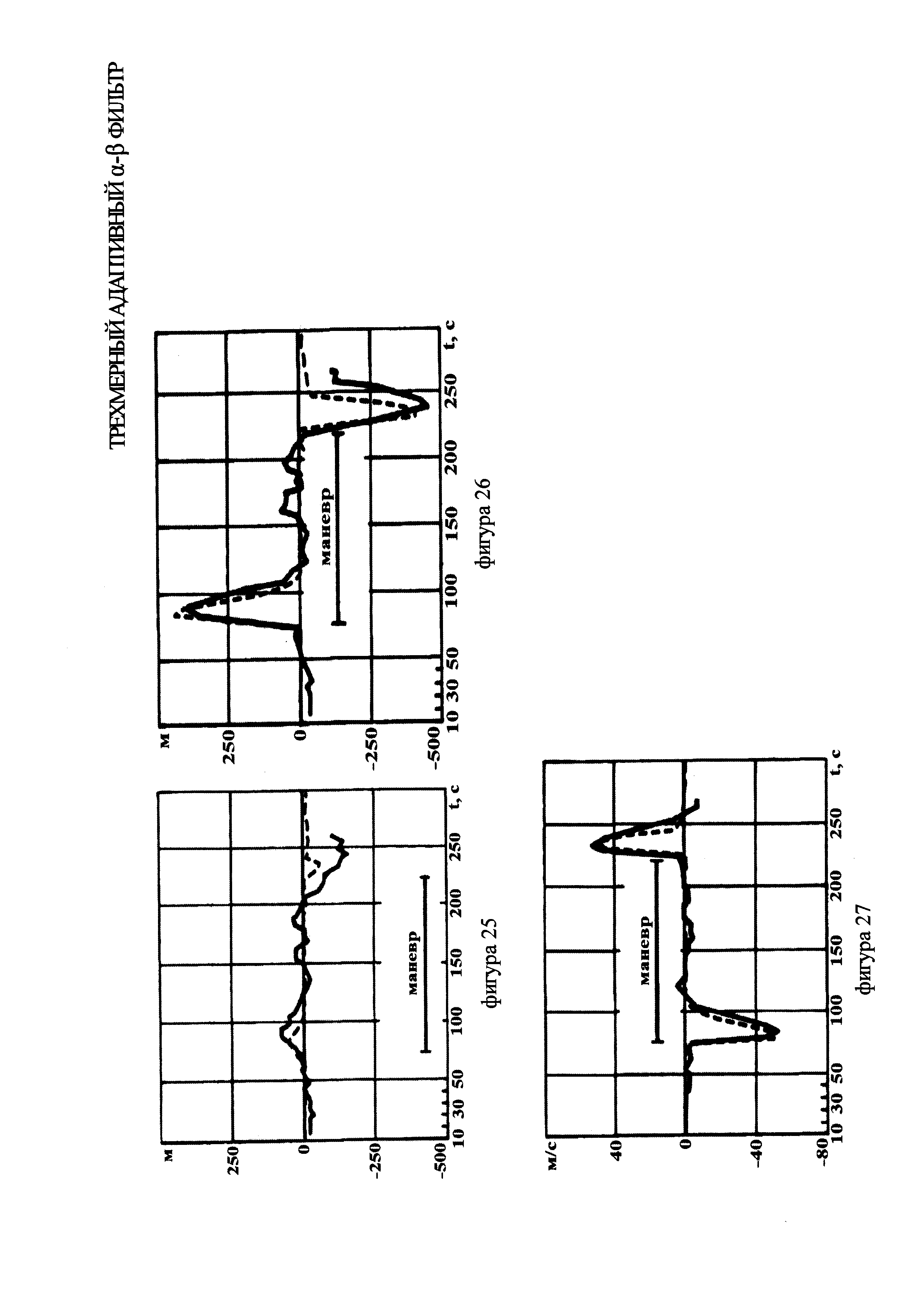
На фигурах 20-29 приведены сравнительные характеристики предлагаемого фильтра с характеристиками адаптивного калмановского фильтра с измерением и без измерения радиальной скорости (Л2, стр. 249-254). Условия экспериментов и характеристики калмановских фильтров заимствованы из Л2 (стр. 252, рисунки 4.29; 4.30, стр. 253, рисунки 4.31- 4,33; стр. 254, рисунки 4,35, 4.36).
На фигурах 20-29 характеристики калмановских фильтров изображены сплошными линиями, характеристики трехмерного адаптивного α-β фильтра изображены пунктирными линиями. Наименования характеристик соответствуют их наименованиям в Л2.
На фигуре 20 изображены средние ошибки фильтрации положения цели по оси X у фильтров без измерения радиальной скорости (радиальная траектория).
На фигуре 21 изображены средние ошибки экстраполяции положения цели по оси X у фильтров без измерения радиальной скорости (радиальная траектория).
На фигуре 22 изображены средние ошибки фильтрации скорости цели вдоль оси X у фильтров без измерения радиальной скорости (радиальная траектория).
На фигуре 23 изображены средние ошибки фильтрации скорости цели вдоль оси X у фильтров без измерения радиальной скорости (траектория движения с центростремительным ускорением).
На фигуре 24 изображены средние ошибки фильтрации скорости цели вдоль оси У у фильтров без измерения радиальной скорости (траектория движения с центростремительным ускорением).
На фигуре 25 изображены средние ошибки фильтрации положения цели по оси X у фильтров с измерением радиальной скорости (радиальная траектория).
На фигуре 26 изображены средние ошибки экстраполяции положения цели по оси X у фильтров с измерением радиальной скорости (радиальная траектория).
На фигуре 27 изображены средние ошибки фильтрации скорости цели вдоль оси X у фильтров с измерением радиальной скорости (радиальная траектория).
На фигуре 28 изображены средние ошибки фильтрации скорости цели вдоль оси X у фильтров с измерением радиальной скорости (траектория движения с центростремительным ускорением).
На фигуре 29 изображены средние ошибки фильтрации скорости цели вдоль оси У у фильтров с измерением радиальной скорости (траектория движения с центростремительным ускорением).
Осуществление изобретения
Функциональная схема устройства изображена на фигуре 4.
В состав устройства включены;
1. Трехмерный α-β фильтр 1, работающий в прямоугольной системе координат, у которого на вход Х(,У,Н) поступают сигналы, пропорциональные прямоугольным координатам обновляющей отметки цели, входы α и β соединены соответственно с первым и вторым выходами вычислителя коэффициентов сглаживания 6, выходы Х(У,H)n и Vх(у,н)n соединены соответственно с первым и вторым входами компенсатора 4, а выход ΔХ(У,Н)nэ соединен с первым входом преобразователя координат 2.
2. Преобразователь координат 2 обновляющей последовательности в прямоугольную связанную систему координат, на второй вход которого поступают необходимые для преобразования азимут отметки β и угол места отметки е, а выход соединен с входом фильтра нижних частот 3.
3. Фильтр нижних частот 3, предназначенный для подавления в обновляющей последовательности случайной составляющей, вызванной погрешностями измерения, выход которого соединен с третьим входом компенсатора 4 и первым входом обнаружителя маневра 5.
4. Обнаружитель маневра 5, предназначенный для оценки вероятности и интенсивности маневра (показателя маневра Z) по положению сглаженного вектора обновляющей последовательности относительно границ порогового эллипсоида в прямоугольной связанной системе координат, на второй вход которого подключен сигнал, пропорциональный дальности отметки от цели, а выход которого соединен с входом вычислителя коэффициентов сглаживания 6 и четвертым входом компенсатора 4.
5. Вычислитель коэффициентов сглаживания 6, предназначенный для вычисления коэффициентов α и β по величине показателя маневра Z, первый и второй выходы которого соединены соответственно с входами α и β трехмерного фильтра 1
7. Компенсатор 4, предназначенный для устранения смещения оценок координат, скоростей и экстраполированного положения по сигналам, поступающим на его третий вход от фильтра нижних частот 3 и показателя маневра, поступающего на его четвертый вход от обнаружителя маневра 5.
В результате компенсации несмещенные оценки координат со второго выхода и скоростей с третьего выхода поступают только потребителю, а экстраполированные координаты с первого выхода используются при стробировании очередной отметки от цели.
При наличии радиальной скорости в составе характеристик отметки появляется возможность дополнить обнаружитель маневра вторым каналом обнаружения для более стабильной работы обнаружителя при больших дальностях до цели. Схема адаптивного фильтра со вторым каналом обнаружения маневра изображена на фигуре 5.
В схему адаптивного фильтра дополнительно включаются:
1. Обнаружитель маневра 7, предназначенный для оценки вероятности и интенсивности маневра (показателя маневра Z) по отношению квадрата разности измеренной и предсказанной радиальных скоростей к величине порога, обеспечивающего вероятность ложных тревог меньше заданной, у которого первый и второй входы соединяются соответственно с выходами Х(У,H)n и Vх(у,н)n α-β фильтра 1, к третьему входу подключается сигнал, пропорциональный дальности отметки, а выход подключается к второму входу схемы сборки по «или» 8.
2, Схема сборки по «или» 8, предназначенная для объединения (выбора большей величины), поступающих на первый и второй входы показателей маневра Z, а выход соединяется с входом вычислителя коэффициентов сглаживания 6 и с четвертым входом компенсатора 4. При этом выход обнаружителя маневра 5 отключается от вычислителя коэффициентов сглаживания 6 и подключается к первому входу сборки по «или» 8.
Последовательность действий в устройстве (Фигура 4) с необходимыми математическими выражениями вычислительных операций.
После приема характеристик очередной отметки от цели (X,У,H,D,β,ε) рассчитывается экстраполированное положение цели для использования в процедуре стробирования. При этом порядок расчета, который будет изложен при описании работы компенсатора, отличается от расчета экстраполяции для вычисления обновляющей последовательности. При положительных результатах стробирования, которое не является функцией фильтра и здесь не рассматривается, прямоугольные координаты Х(У,Н) передаются на вход координат α-β фильтра 1, а полярные координаты βn, εn, на второй вход преобразователя координат 2, дальность отметки Dn на второй вход обнаружителя маневра 5.
Процесс сопровождения трехмерным α-β фильтром осуществляется в прямоугольной системе координат и традиционно управляется вектором обновляющей последовательности Rnэ.. с координатами ΔХ(У,Н)nэ. При расчете обновляющей последовательности экстраполяция проводится по данным вычисленным α-β фильтром на предыдущем шаге обновления без коррекции компенсатором.
ΔХ(Y,H)nэ=Х(Y,Н)n-(Х(Y,H)n-1+ΔT⋅VX(Y,H)n-1),
где:
- X(Y,H)n - измеренная (не сглаженная) на n-ом шаге координата цели;
- Х(Y,H)n-1 - сглаженная на n-1 (предыдущем) шаге координата цели;
- ΔT=Тn-Тn-1 - период обновления координат;
- VX(Y,H)n-1 - сглаженная на предыдущем шаге составляющая скорости по данной координате.
Преобразователем координат 2 вектор Rnэ отображается в прямоугольной связанной системе координат, Формулы преобразования зависят от типа выбранной для сопровождения прямоугольной системы координат. При сопровождении в системе Гаусса-Крюгера пересчет делается по формулам:

где:
- β - азимут отметки от цели;
- ε - угол места отметки цели
Для улучшения условий обнаружения динамической составляющей проводится сглаживание координат ΔD(B,ξ)nэ вектора Rnэ цифровым экспоненциальным фильтром нижних частот 3

где ψ - константа, определяющая степень подавления случайной составляющей.
Обнаружителем маневра 5 сглаженные координаты ΔD(В,ξ)nэ, поступающие от фильтра нижних частот 3 на первый вход, и дальность отметки Dn, поступившая на второй вход, используются для вычисления показателя маневра Zn по формуле порогового эллипсоида равной плотности

σD, σВ σξ - с.к.о. погрешностей измерения, учитываемые в эллипсоиде вдоль осей D, β, ε. При работе фильтра они являются константами, а вычисляются при проектировании по формулам:
σD=Кn⋅Кψ⋅Кэ⋅σD:
σВ=Кn⋅Кψ⋅Кэ⋅σβ;
σξ=Кn⋅Кψ⋅Кэ⋅σε,
где:
- Кп - коэффициент порога, выбираемый из соображений допустимой вероятности ложного определения маневра (вероятности ложных тревог);
- Кψ и Кэ - коэффициенты, учитывающие подавление случайной составляющей фильтром НЧ и погрешности экстраполяции.
В соответствии с полученной величиной показателя маневра Zn, вычислителем коэффициентов сглаживания 6 рассчитываются коэффициенты αn и βn

- Δ - постоянный коэффициент, ограничивающий минимальную величину αn;
- А - постоянный коэффициент, ограничивающий максимальное значение αn;
- В - постоянный коэффициент, определяющий крутизну нарастания an при увеличении показателя маневра.
Величины Δ, А и В определяются на этапе проектирования.

Затем коэффициенты сглаживания устанавливаются в α-β фильтре 1, который осуществляет процесс сопровождения и сглаживания по традиционным формулам (Л1 стр. 384, уравнения (9.6.2)).

Последней операцией в цикле обработки отметки является компенсация динамического отставания.
Для компенсации динамического отставания сглаженные координаты вектора обновляющей последовательности ΔD(В,ξ)nэ, поступающие на третий вход компенсатора 4 от фильтра нижних частот 3, пересчитываются в область состояний
Пересчет координат проводится по формулам

Исходными данными для компенсации служат вычисленные α-β фильтром сглаженные координаты цели, сглаженные скорости, поступающие соответственно на первый и второй вход компенсатора 4 и величины Unx(у,н), которые определяют динамическое отставание по прямоугольным координатным осям при уверенном обнаружении маневра, т.е. при величинах Zn, превышающих некоторый порог П. При превышении порога величины Unx(у,н) используются в текущем (n-ом) цикле для корректировки координат и скоростей. Поэтому на четвертый вход компенсатора от обнаружителя маневра 5 предается величина Zn, в зависимости от которой определяются значения координат Х(У,Н)n*, скоростей Vх(у,н)n*, выдаваемых потребителю
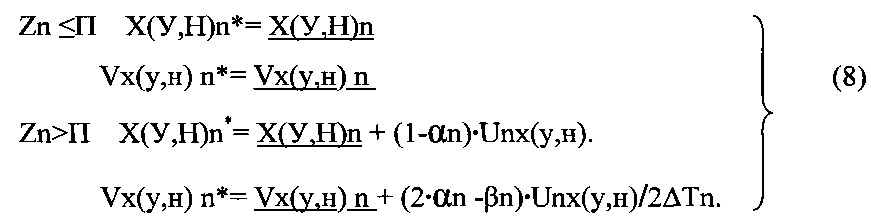
В начале следующего (n+1-го) цикла для стробирования очередной отметки вычисляются исходные экстраполированные координаты
Х(У,H)n+1э=Х(У,H)n+(ΔТn+1)⋅Vx(у,н)т
На стробирование поступают координаты Х(У,Н)n+1э*, которые зависят от величины Zn

Методу выявления маневра по обновляющей последовательности присущ недостаток, заключающийся в том, что чувствительность к выявлению маневра уменьшается при больших дальностях цели.
В РЛС помимо координат цели измеряется радиальная скорость. В современных РЛС она измеряется с высокой точностью, что позволяет использовать ее для оценки совершения маневра. По аналогии с обновляющей последовательностью выявление маневра и оценка его интенсивности проводится по разности ΔVp фактически измеренной радиальной скорости Vpn и прогнозируемой радиальной скорости Vрэ в расчете на дальнейшее равномерной и прямолинейное движение

где:
- Хn, Уn, Dn - измеренные на n-ом шаге координаты цели;
- Vхn-1, Vуn-1 - сглаженные α-β фильтром составляющие скоростей на предыдущем шаге обновления.
Показатель маневра в обнаружителе маневра 7 (Фигура 5) вычисляется по формуле

- Кn - коэффициент порога;
- σVp - с.к.о. погрешностей измерения радиальной скорости в соответствии с ТТХ РЛС.
Схемы, изображенные на чертежах (Фигура 2, Фигура 4 и Фигура 5) с указанием всех необходимых связей между составными частями, фактически являются полной схемой устройства адаптивного фильтра сглаживания. Эти схемы совместно с описанием последовательности и содержания операций, выполняемых устройством, достаточны для реализации устройства, как на интегральных микросхемах, например, на ПЛИС и микроконтроллерах, так и в виде комплекта программных модулей, объединенных связями в соответствии с приведенными схемами, функционирующих в ЭВМ и выполняющих функции узлов схем,
Проверка возможности получения заявленных технических результатов при осуществлении изобретения проведена методом моделирования с применением ЭВМ.
Модель программным способом обеспечивает:
- формирование траекторий целей и имитацию циклического движения цели по траектории с количеством циклов до 106;
- имитацию измерения координат цели РЛС с заданными погрешностями измерения;
- одновременное подключение измеренных координат к программным имитаторам сравниваемых фильтров сглаживания, измерение числовых характеристик погрешностей сопровождения обоих фильтров в каждой точке траектории;
- вывод на отображение графиков изменения характеристик в зависимости от положения цели на траектории.
Для сравнения прототипа и предлагаемого фильтра в каждой j-той точке траектории при количестве i-тых измерений n равном 106 вычислялись следующие характеристики:
статистические средние случайных величин (математические ожидания M[Кj]) отклонений в пространстве j-тых сглаженных положений трассы с координатами Хj, Уj, Hj от истинных положений траектории цели в j-той точке с координатами Xцj, Уцj, Hцj
 ;
;
- статистические средние случайных величин отклонений экстраполированных положений в пространстве с координатами Хэj Уэj Нэj от истинных положений траектории в j-тых точках M[Эj]
 ;
;
- статистические средние отклонения M[qj] сглаженного курса qj от истинного qцj
- статистические средние отклонения M[Uj] сглаженных координат и экстраполированных координат М[Ujэ] от истинных координат траектории цели Uцj
 ,
,  ,
,
где U - одна из координат X или У или Н.
Для подтверждения технического результата по п 1 на фигурах 7-18 приводятся характеристики адаптивного α-β фильтра и прототипа, у которого предварительно размеры стробов и пары коэффициентов сглаживания были оптимизированы методом моделирования. Измерения проводились на модели при периоде обзора 2 с, с.к.о. погрешностей измерения дальности 100 м, азимута 0,5°, угла места 0,5°, на следующих траекториях:
1. Траектория (фигура 6), которая математически описывается системой уравнений

Характеристики такой траектории в процессе движения постоянно изменяются по курсу, скорости и высоте:
- скорость по курсу в пределах 0-480 м/с с изменяющимися курсовыми ускорениями разгона и торможения в диапазоне 0-50 м/с2;
- одновременно с ускорениями вдоль курса цели воздействуют центростремительные ускорения, изменяющиеся в диапазоне 0-60 м/с2;
- снижение на 1 км, разворот с набором высоты 2 км, снижение на 1 км.
Движение по маршруту проводится циклически из исходной точки с координатами Хо=Уо=10 км, Но=2 км (количество циклов 106).
Результаты измерений характеристик отображены на фигурах 7-12.
2 Траектория с разворотом и участками равномерного прямолинейного движения.
Исходная точка Хо=5 км, Уо=-3,2 км, Но=2 км. Прямолинейное равномерное движение на удаление вдоль координаты X со скоростью 400 м/с до точки разворота с координатами Х=25 км У=-3,2 км, разворот на 90° с ускорением 50 м/с2, равномерное прямолинейное движение на сближение.
Результаты измерений характеристик отображены на фигурах 13-19
Для подтверждения технического результата по п. 2 проводилось сравнение с адаптивным калмановским фильтром, использующим радиальную скорость. Условия экспериментов и результаты работы калмановского фильтра заимствованы из Л2 (стр. 252-254)
На графиках фигур 20-29 результаты измерения характеристик предлагаемого адаптивного α-β фильтра для сравнения совмещены с заимствованными характеристиками калмановского фильтра.
Условия проведения экспериментов
- измерения проводятся по двум координатам;
- период обзора 5 с;
- с.к.о измерения дальности 150 м, азимута 3 мрад, радиальной скорости 22 м/с2.
При моделировании использовались две траектории.
1. Радиальная траектория с участком ускоренного движения Координаты исходной точки Хо=Уо=10 км, скорость в исходной точке Vo=350 м/с. Начиная с 75-й секунды от начала движения из исходной точки, в течение 150 секунд имитировалось воздействие ускорения величиной 20 м/с. Затем 75 секунд продолжалось равномерное движение (Л2, стр. 252, рисунок 4.29)
2. Траектория движения с центростремительным ускорением. Координаты исходной точки Хо=-30 км, Уо=10 км, скорость в исходной точке Vo=500 м/с. Начиная с 100-й секунды от начала движения из исходной точки, в течение 100 секунд имитировалось воздействие центростремительного ускорения величиной 10 м/с. Затем 100 секунд продолжалось равномерное движение (Л2, стр. 252, рисунок 4,30).
Характеристики сравниваемых фильтров без измерения радиальной скорости приведены на фигурах 20-24, а с измерением радиальной скорости на фигурах 25-29.
Способ определения параметров начальных условий нелинейной траектории воздушной цели
Автоматическое нагнетательное устройство высоковязких материалов
Способ пуска ракет для подвижных пусковых установок
Способ обнаружения и сопровождения низколетящих целей
Способ непрерывной оптической связи с низколетящей целью
Способ определения параметров начальных условий нелинейной траектории воздушной цели
Автоматическое нагнетательное устройство высоковязких материалов
Способ пуска ракет для подвижных пусковых установок
Способ построения интегральной зоны поражения группировки огневых средств

