Результат интеллектуальной деятельности: УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЦЕЛИ ПОСРЕДСТВОМ КОРРЕКЦИИ ПО ЗВЕЗДЕ, ПРЕДНАЗНАЧЕННОЕ ДЛЯ УСТАНОВКИ НА ПОДВИЖНОМ НОСИТЕЛЕ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству определения местоположения цели, которое предназначено для установки на носителе и в котором применяют коррекцию по звезде.
Уровень техники
Из предшествующего уровня техники известно устройство определения местоположения цели, предназначенное для установки на борту летательного аппарата, при этом устройство содержит:
- подвижную камеру, выполненную с возможностью ориентирования в сторону цели;
- инерциальную систему управления, выполненную с возможностью вычисления данных положения и/или ориентации камеры,
- модуль определения местоположения, выполненный с возможностью оценки положения цели на основании данных, выдаваемых инерциальной системой управления.
Как правило, устройство устанавливают на стенке летательного аппарата, чтобы обеспечивать определение местоположения целей на земле, когда летательный аппарат совершает полет.
Однако на данные, выдаваемые инерциальной системой управления, могут влиять систематические погрешности, поэтому положение, оцениваемое модулем определения местоположения, может намного отличаться от реального положения цели.
Чтобы корректировать такие погрешности, как известно, на летательном аппарате устанавливают звездный прицел. Звездный прицел устанавливают на верхней стенке летательного аппарата таким образом, чтобы он был направлен в небо.
Звездный прицел содержит камеру, которая снимает изображения по меньшей мере одной звезды, положение которой заранее определено, и модуль, выполненный с возможностью применять к данным, выдаваемым инерциальной системой управления, обработку, называемую в литературе «коррекцией по звезде» или «коррекцией по привязке к звезде». Изображения, снимаемые камерой звездного прицела, позволяют выявить отклонение между предполагаемым положением звезды и ее реальным положением. В соответствии с коррекцией по звезде это отклонение используют, чтобы корректировать погрешности, искажающие данные, вычисляемые инерциальной системой управления. Эта коррекция является эффективной с учетом того, что звезда является надежной контрольной точкой.
Однако носитель может подвергаться механическим деформациям, поэтому относительное положение камеры, используемой для наблюдения цели, относительно прицела может непредсказуемо меняться и снижать, таким образом, эффективность коррекции по звезде.
Кроме того, звездный прицел является относительно громоздким устройством, который утяжеляет носитель, что является серьезным недостатком, особенно когда носитель является легким летательным аппаратом типа беспилотного летательного аппарата.
В документе ЕР 1 440 329 В1 предложен способ определения местоположения цели с использованием подвижной камеры.
Раскрытие изобретения
Задачей изобретения является повышение эффективности работы устройства определения местоположения, предназначенного для установки на носителе, но без утяжеления этого носителя.
В связи с вышеизложенным, первым объектом изобретения является устройство определения местоположения цели, предназначенное для установки на подвижном носителе, при этом устройство содержит:
- камеру, ориентируемую относительно носителя:
- в первой ориентации для наблюдения цели, чтобы камера могла снять изображение цели, и
- во второй ориентации для наблюдения по меньшей мере одной заранее определенной звезды, чтобы камера могла снять по меньшей мере одно изображение звезды,
- инерциальную систему управления, выполненную с возможностью вычисления данных положения и ориентации камеры,
- модуль коррекции по звезде, выполненный с возможностью применения коррекции по звезде к данным, вычисленным инерциальной системой управления, на основании изображения звезды, чтобы выдавать скорректированные данные положения и ориентации,
- модуль определения местоположения, выполненный с возможностью оценки положения цели на основании изображения цели и скорректированных данных,
- интерфейс связи с постом оператора, при этом камера выполнена также с возможностью переходить из одной из первой и второй ориентаций в другую в ответ на получение через интерфейс связи команды, переданной постом оператора.
В предложенном устройстве одна и та же камера служит для наблюдения локализуемой цели и для съемки изображения или изображений по меньшей мере одной заранее определенной звезды, которую используют для применения коррекции по звезде. Поскольку от использования дополнительной камеры можно отказаться, общий габарит устройства определения местоположения уменьшается.
Кроме того, на характеристики устройства определения местоположения не влияют механические деформации носителя.
Способ, являющийся первым объектом изобретения, может быть дополнен следующими отличительными признаками, рассматриваемыми отдельно или в комбинации, если это технически возможно.
Устройство определения местоположения может содержать модуль оценки погрешности, выполненный с возможностью оценивать погрешность, которая может влиять на точность положения, оцениваемого модулем определения местоположения, и камера может быть выполнена с возможностью переходить из первой ориентации во вторую ориентацию, когда погрешность переходит первый заранее определенный порог.
Погрешность может быть погрешностью положения, влияющей на положение цели, оцениваемое модулем определения местоположения.
Альтернативно погрешность может быть погрешностью курса камеры, влияющей на данную курса, вычисляемую инерциальной системой управления.
Первый порог может быть меньшим или равным 0,3 миллирадиана.
Камера может быть выполнена с возможностью переходить из второй ориентации в первую ориентацию, когда погрешность переходит второй заранее определенный порог.
Второй порог может быть меньшим или равным первому порогу.
Камера может быть выполнена с возможностью снимать изображение заранее определенной звезды в режиме инфракрасной съемки, в котором камера является чувствительной к длинам инфракрасных волн.
Вторым объектом изобретения является летательный аппарат, такой как беспилотный летательный аппарат, содержащий устройство определения местоположения цели, являющееся первым объектом изобретения.
Третьим объектом изобретения является способ определения местоположения цели, содержащий следующие этапы:
- ориентирование подвижной камеры, установленной на подвижном носителе, в первую ориентацию, в которой цель находится в поле зрения камеры,
- вычисление, при помощи инерциальной системы управления, данных положения и ориентации камеры,
- съемка по меньшей мере одного изображения цели при помощи камеры,
- ориентирование камеры во вторую ориентацию по отношению к носителю, в которой заранее определенная звезда находится в поле зрения камеры,
- съемка по меньшей мере одного изображения звезды при помощи камеры,
- применение коррекции по звезде к данным, вычисленным инерциальной системой управления, на основании изображения звезды, чтобы получить скорректированные данные положения и ориентации,
- оценка положения цели на основании изображения цели и скорректированных данных,
в котором камера переходит из одной из первой и второй ориентаций в другую в ответ на получение команды, переданной постом оператора.
Краткое описание чертежей
Другие отличительные признаки, задачи и преимущества изобретения будут более очевидны из нижеследующего описания, представленного в качестве иллюстративного и не ограничительного примера, со ссылками на прилагаемые чертежи, на которых:
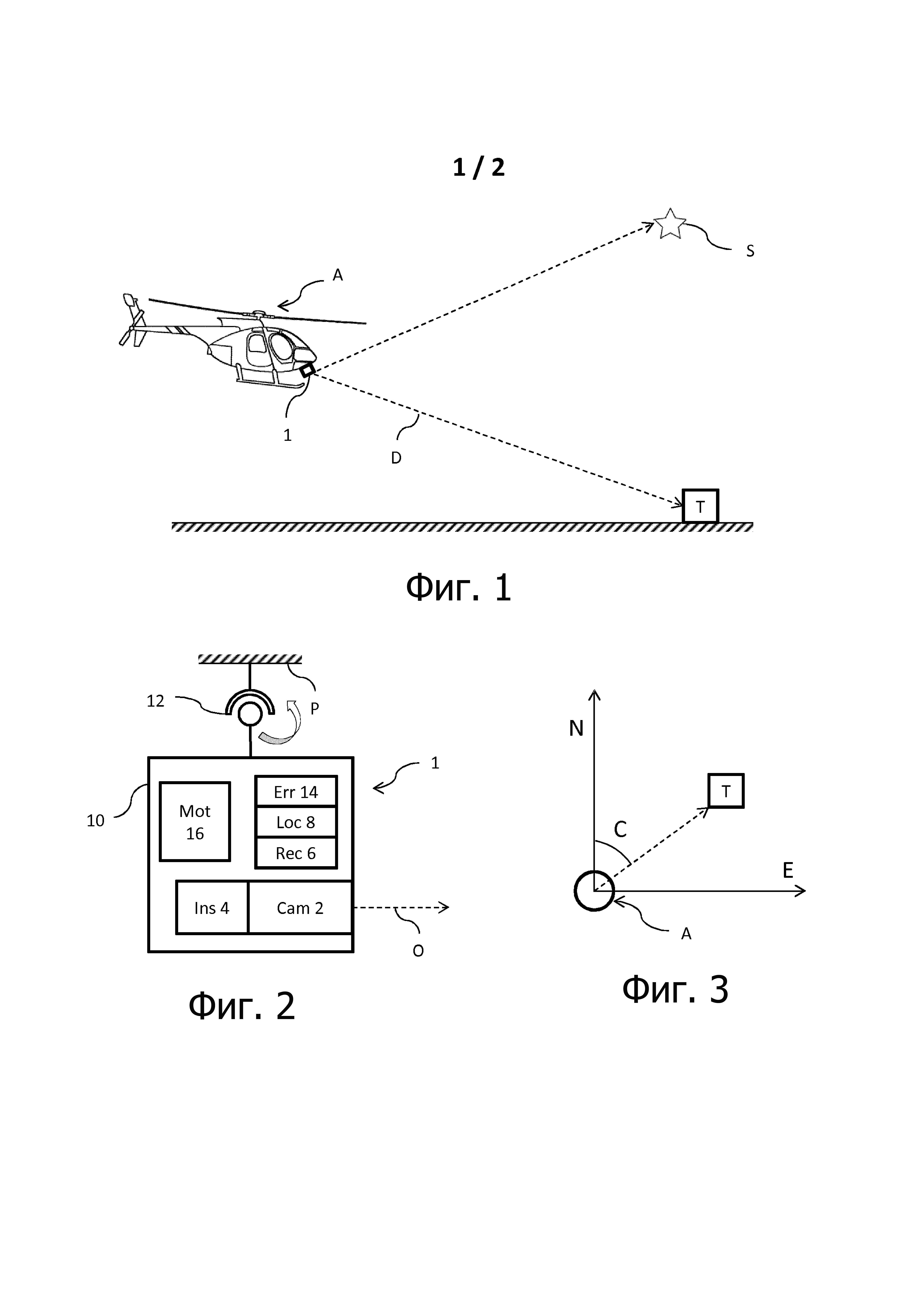
Фиг. 1 - вид в вертикальной плоскости относительно земли цели, носителя, на котором установлено устройство определения местоположения цели, и звезды.
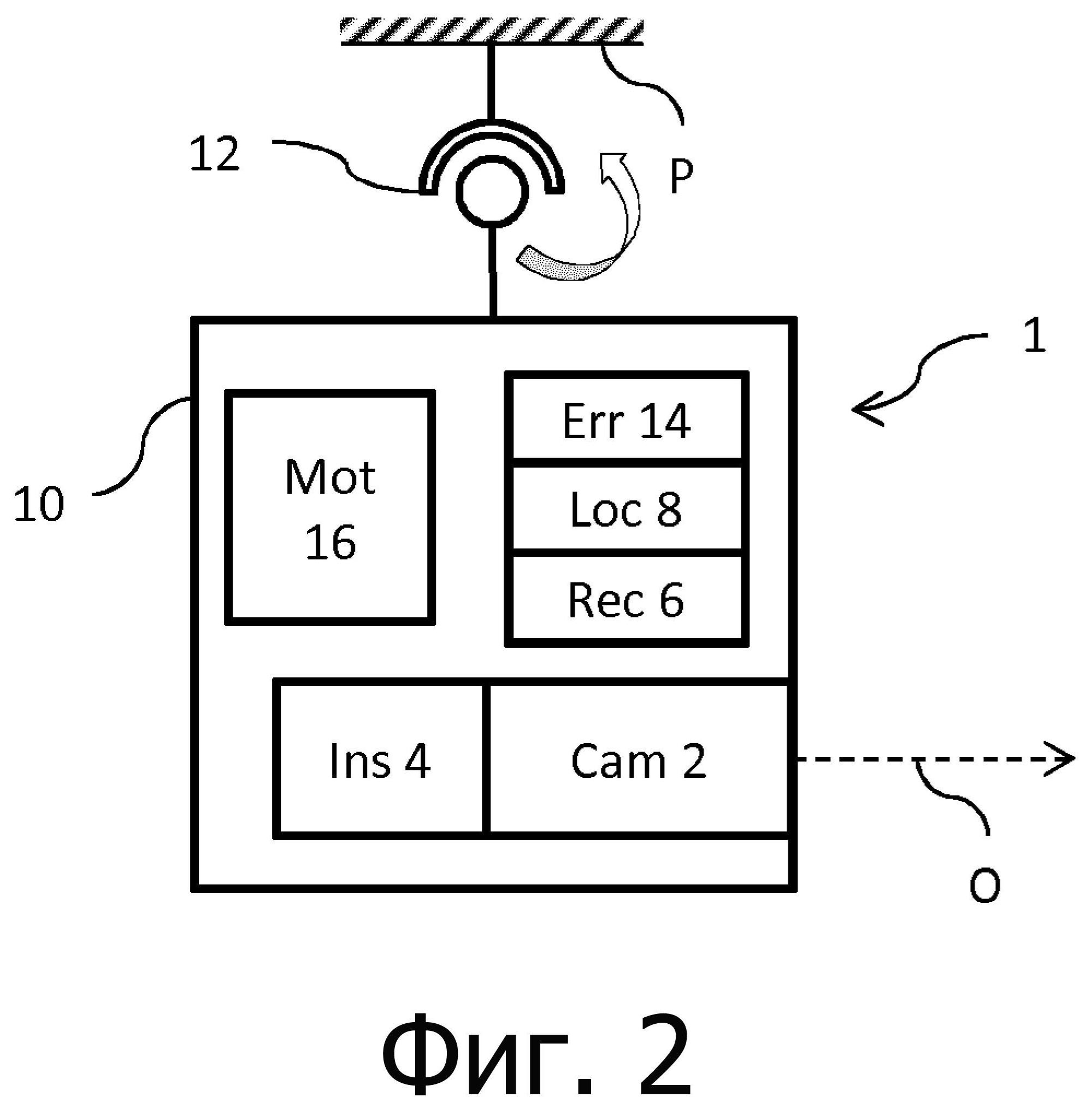
Фиг. 2 - схематичный вид внутренних компонентов устройства определения местоположения согласно варианту выполнения изобретения.
Фиг. 3 - вид в горизонтальной плоскости относительно земли носителя и цели, показанных на фиг. 1.
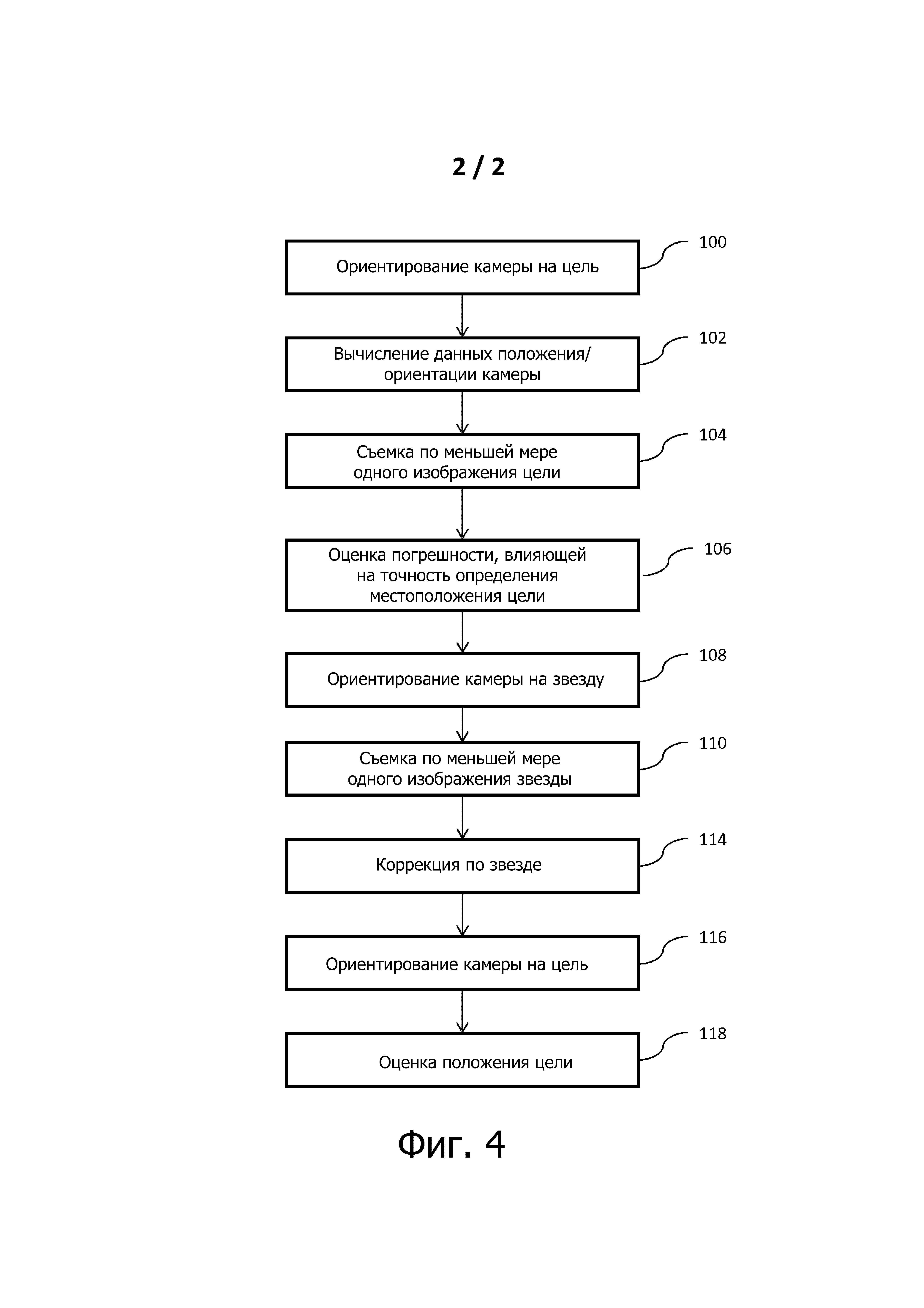
Фиг. 4 - блок-схема этапов способа определения местоположения цели согласно варианту осуществления изобретения.
Подробное описание изобретения
Устройство определения местоположения цели
Как показано на фиг. 1, подвижный носитель, такой как летательный аппарат А, содержит устройство 1 определения местоположения цели Т. На фиг. 1 показана также звезда S.
Летательный аппарат А является беспилотным летательным аппаратом, вертолетом, самолетом и т.д. Показанный на фиг. 1 летательный аппарат является вертолетом.
Как показано на фиг. 2, устройство 1 определения местоположения содержит камеру 2, блок 4 инерциальных датчиков, модуль 6 коррекции по звезде и модуль 8 определения местоположения цели Т.
Устройство 1 определения местоположения установлено на нижней стенке Р летательного аппарата А, то есть на стенке, которая должна находиться напротив земли, когда летательный аппарат А совершает полет.
В варианте устройство 1 определения местоположения может быть установлено на другой стенке летательного аппарата А, например, на верхней стенке летательного аппарата А, то есть на стенке, которая должна находиться напротив неба, когда летательный аппарат А совершает полет.
Устройство 1 определения местоположения содержит также корпус 10, установленный с возможностью вращения на стенке летательного аппарата А, например, при помощи шарового шарнира 12.
Камера 2, блок 4 инерциальных датчиков, модуль 6 коррекции и модуль 8 определения местоположения расположены в корпусе 10 и являются, например, неподвижными относительно этого корпуса.
В частности, блок 4 инерциальных датчиков предпочтительно неподвижно соединен с камерой 2.
Камера 2 является подвижной и может перемещаться между несколькими ориентациями относительно носителя А.
С одной стороны, камера 2 может быть ориентирована в направлении земли.
С другой стороны, камера 2 может быть ориентирована в направлении неба. Предпочтительно камера 2 может принимать ориентацию, в которой оптическая ось камеры 2 имеет максимальный угол возвышения в 30 градусов (то есть оптическая ось камеры 2 образует положительный угол в 30 градусов относительно горизонтальной плоскости, параллельной земле, и не поднимается выше к зениту).
Камера 2 установлена на летательном аппарате А таким образом, что оптическую ось камеры 2 можно ориентировать в направлении земли или в направлении неба, причем без помех со стороны стенки, на которой установлено устройство, и в целом со стороны корпуса летательного аппарата А. Например, камера установлена на переднем крае нижней стенки Р летательного аппарата А, как показано на фиг. 1, или на боковом крае этой стенки Р.
Поскольку камера 2 неподвижно соединена с корпусом 10, то именно устройство 1 определения местоположения является подвижным и может поворачиваться относительно стенки летательного аппарата и может обеспечивать такой угол возвышения.
Камера 2 содержит объектив, имеющий перекрестье. Перекрестье проходит через оптическую ось О камеры 2.
Камера 2 имеет мгновенное поле зрения (“instantaneous field of view” или IFOV), меньшее или равное 0,1 миллирадиана. Поле IFOV является полем зрения, соответствующим пикселю изображения, снимаемого камерой 2. Такую камеру 2 можно применять для определения местоположения целей на очень большом расстоянии.
Кроме того, камера 2 является чувствительной к длинам волн в видимой и/или инфракрасной области, например, к длинам инфракрасных волн в диапазоне SWIR (Short-Wavelength infrared) от 1 до 2 микрометров.
Например, камеру 2 можно конфигурировать для разных режимов съемки, при этом каждый режим съемки делает камеру 2 чувствительной к длинам волн, характерным для этого режима съемки. Например, камеру 2 можно конфигурировать не только в режиме инфракрасной съемки, в котором она становится чувствительной к указанным длинам волн в инфракрасной области, но также в других режимах съемки (в видимой области, в области УФ и т.д.).
Кроме того, блок 4 инерциальных датчиков сам по себе является известным устройством, содержащим множество инерциальных датчиков, как правило, акселерометров и гирометров.
Блок 4 инерциальных датчиков выполнен с возможностью вычисления данных положения и ориентации камеры 2.
Модуль 6 коррекции по звезде известен из предшествующего уровня техники, например, из документа ЕР 3 073 223 А1.
Модуль 8 определения местоположения выполнен с возможностью оценки положения цели Т и тоже известен из предшествующего уровня техники.
Модуль 8 определения местоположения содержит дальномер. Дальномер выполнен с возможностью оценивать расстояние между камерой 2 и целью Т, наблюдаемой камерой 2.
Дальномер может быть активным дальномером, например, является известным лазерным дальномером.
В альтернативном варианте дальномер является пассивным. Он вычисляет расстояние между камерой 2 и целью Т, отталкиваясь от цифровой модели местности, на которой находится цель Т.
Устройство содержит также модуль 14 оценки погрешности, выполненный с возможностью оценивать погрешность, которая может влиять на точность положения цели Т, оцениваемого модулем 8 определения местоположения.
Модули коррекции, определения местоположения и оценки могут быть разными физическими устройствами, одним и тем же физическим устройством, могут быть разными компьютерными программами, исполняемыми одним или несколькими процессорами устройства, или могут быть разными частями компьютерной программы, исполняемой одним или несколькими процессорами устройства.
Кроме того, устройство содержит привод 16 для приведения во вращение устройства по отношению к носителю. Устройство и, в частности, привод 16 получает питание электрической энергией от носителя.
Устройство содержит также интерфейс связи с постом оператора.
В случае летательного аппарата А, отличного от беспилотного летательного аппарата, пост оператора может быть кабиной летательного аппарата А: интерфейс связи является, например, интерфейсом проводной связи или интерфейсом беспроводной радиосвязи.
В альтернативном варианте пост оператора может находиться на наземной станции или на другом носителе, отличном от носителя, на котором установлено устройство. В этом случае интерфейс связи является интерфейсом беспроводной радиосвязи.
Обычно устройство представляет собой гиростабилизированный блок (BGS), работающий автономно относительно летательного аппарата, если не считать его питания энергией от летательного аппарата А.
В других вариантах выполнения модули 6, 8, 14 могут быть разнесены внутри летательного аппарата.
Способ определения местоположения цели без коррекции по звезде
Предположим, что летательный аппарат А находится в полете. Цель Т находится на земле.
Как показано на фиг. 4, камера 2 ориентирована в направлении цели Т в соответствии с первой ориентацией (этап 100).
Для определения местоположения цели устройство осуществляет следующие этапы.
Блок 4 инерциальных датчиков вычисляет данные положения и/или ориентации камеры 2 (этап 102).
Камера снимает по меньшей мере одно изображение цели Т (этап 104).
Дальномер (активный лазерный или пассивный) оценивает расстояние между целью Т, которую наблюдает камера 2, и камерой 2.
Модуль 8 определения местоположения оценивает положение цели Т, комбинируя расстояние, оцениваемое дальномером, с данными ориентации и положения камеры 2 и со снятым изображением (этап 118).
Необязательно, при оценке, осуществляемой модулем 8 определения местоположения, учитывают также угловое отклонение между оптической осью камеры 2 и осью, проходящей через точку камеры 2 и точку цели Т. Это угловое отклонение вычисляют в зависимости от отклонения в пикселях на изображении, снятом камерой 2 в первой ориентации в ходе этапа 104, между перекрестьем камеры 2, проходящем через оптическую ось, и пикселем цели Т. Это отклонение является нулевым, если на снятом изображении перекрестье совмещается с целью Т. Например, можно ориентировать камеру 2 таким образом, чтобы получить такое совмещение, что позволяет не учитывать это отклонение при оценке, осуществляемой модулем 8 определения местоположения.
Для такой оценки модуль 8 определения местоположения может использовать следующую формулу:

где
-  является положением цели Т, оцениваемым модулем 8 определения местоположения, причем это положение выражено в системе координат, связанной с Землей,
является положением цели Т, оцениваемым модулем 8 определения местоположения, причем это положение выражено в системе координат, связанной с Землей,
- Е является навигационным состоянием, оцениваемым инерциальной системой 4 управления и содержащим данные по меньшей мере одного данную положения  и данные по меньшей мере одной ориентации
и данные по меньшей мере одной ориентации  камеры, выдаваемые блоком 4 инерциальных датчиков, причем эти данные выражены, например, в географической системе координат с центром на устройстве, содержащей ось, направленную на север Земли, ось, направленную на восток и третью ось, при этом все три оси образуют ортонормированную систему координат,
камеры, выдаваемые блоком 4 инерциальных датчиков, причем эти данные выражены, например, в географической системе координат с центром на устройстве, содержащей ось, направленную на север Земли, ось, направленную на восток и третью ось, при этом все три оси образуют ортонормированную систему координат,
- θ является угловым отклонением между оптической осью камеры 2 и осью, проходящей через точку камеры 2 и точку цели Т. Это угловое отклонение является функцией отклонения в пикселях на изображении, снятом камерой 2 в первой ориентации, между перекрестьем камеры 2 и пикселем цели Т (необязательно, как было указано выше),
- D является расстоянием, измеренным дальномером,
- функции  являются заранее определенными функциями.
являются заранее определенными функциями.
Способ определения местоположения цели с коррекцией по звезде
Как было указано во вступлении, данные, выдаваемые инерциальной системой 4 управления в ходе этапа 102, могут иметь погрешности, в частности, погрешности, связанные с отклонениями в показаниях датчиков.
Погрешностью, в наибольшей степени снижающей точность определения местоположения устройством, является погрешность в отношении курса камеры 2, вычисляемого блоком 4 инерциальных датчиков. Как показано на фиг. 3, этот курс является углом С между:
- осью О камеры 2 в проекции на горизонтальную плоскость, параллельную земле (плоскость на фиг. 3, где летательный аппарат и цель показаны сверху), и
- осью N, направленной на север и заключенной в горизонтальной плоскости (при этом ось Е, показанная на фиг. 3, направлена на восток).
Таким образом, когда цель Т находится на большом расстоянии от летательного аппарата А, даже минимальная погрешность курса значительно влияет на итоговую погрешность определения местоположения устройством.
Когда камера 2 занимает первую ориентацию (в направлении на цель Т), модуль оценки оценивает погрешность курса при вычислении инерциальной системой 4 управления (этап 104). Модуль оценки сам по себе может быть блоком 4 инерциальных датчиков: в этом случае, кроме данных положения и ориентации камеры 2, блок 4 инерциальных датчиков выдает данные погрешности курса.
Если погрешность курса превышает заранее определенный порог, модуль оценки подает команду на перемещение камеры 2 во вторую ориентацию, чтобы камера 2 наблюдала заранее определенную звезду S (этап 108).
Предпочтительно первый порог меньше или равен 0,3 миллирадиана, например, равен 0,1 миллирадиана.
Модуль оценки определяет вторую ориентацию в зависимости от данных ориентации, выдаваемых блоком 4 инерциальных датчиков, и от данных расположения звезды S, которые являются заранее определенными данными.
Во второй ориентации камера 2 снимает по меньшей мере одно изображение звезды S (этап 110).
По причине погрешностей, влияющих на данные ориентации, выдаваемые блоком 4 инерциальных датчиков, существует определенное отклонение к пикселях на изображении, снятом камерой 2 во второй ориентации, между пикселем, показывающим перекрестье камеры 2, и точкой, показывающей звезду S. Таким образом, это отклонение отображает ошибки позиционирования и ориентации блока 4 инерциальных датчиков.
Модуль 6 коррекции производит известную коррекцию по звезде на основании данных положения и/или ориентации камеры 2 таким образом, чтобы получить скорректированные данные положения и/или ориентации (этап 114).
Модуль 8 определения местоположения использует скорректированные данные вместо данных, искаженных погрешностями и выдаваемых блоком 4 инерциальных датчиков, чтобы оценить положение цели Т в ходе упомянутого выше этапа 118.
Предпочтительно камера 2 конфигурирована для режима съемки в инфракрасной области, чтобы снимать изображения звезды S. Этот режим инфракрасной съемки позволяет получать наиболее чувствительные изображения звезды S и, следовательно, улучшить способность коррекции по звезде, в частности, за счет сокращения времени, в течение которого цель Т не наблюдается.
Когда камера 2 находится во второй ориентации, этапы съемки изображения 110 и 114 повторяют для одной звезды, и, кроме того, их можно осуществлять по меньшей мере для еще одной звезды с переориентацией камеры на эту другую звезду в ходе этапа 108.
Этап оценки погрешности 106 тоже повторяют во времени, например, через равномерные интервалы, даже когда камера направлена на звезду.
Когда модуль 14 оценки обнаруживает, что погрешность курса опустилась ниже второго заранее определенного порога, модуль оценки подает команду на перемещение камеры 2 в первую ориентацию (которая была сохранена в памяти в момент выхода из нее) (этап 116).
Второй порог меньше или равен первому порогу.
Если камера 2 была конфигурирована для работы в режиме съемки, отличном от режима инфракрасной съемки, при обнаружении перехода первого порога, камеру 2 переконфигурируют в исходный режим съемки для наблюдения цели Т.
Можно также применять другие критерии перехода камеры 2 из одной ориентации в другую.
Например, камеру 2 можно конфигурировать для перехода из одной – первой или второй ориентаций – в другую ориентацию (этапы 108, 116) в ответ на получение через интерфейс связи команды, переданной с поста оператора. Например, может возникнуть необходимость в срочном переориентировании камеры 2 на цель Т, чтобы наблюдать ее, тогда как погрешность еще не опустилась ниже второго порога, причем несмотря на то, что условия еще не оптимизированы для вычисления точного положения этой цели Т.
В частном случае, когда интерфейс связи принимает команду на переход из первой ориентации во вторую ориентацию, камера может исполнять эту команду с задержкой. В некоторых ситуациях камера не может наблюдать звезду, если она была сразу переориентирована во второе положение, например, когда летательный аппарат летит «вниз головой» или когда небо не находится в поле зрения камеры. Следовательно, не только цель не находится в поле зрения камеры, но и коррекция по звезде не может быть осуществлена правильно.
Предпочтительно камеру конфигурируют таким образом, чтобы после получения команды выжидать, пока подвижный носитель займет положение относительно звезды, позволяющее камере наблюдать звезду во второй ориентации, прежде чем перейти из первой во вторую ориентацию. Например, камера может содержать средства обнаружения ориентации летательного аппарата относительно земли или относительно неба или может получать через свой интерфейс связи данные, позволяющие ей узнавать эту ориентацию, чтобы контролировать это ожидание, на основании данных, получаемых на подвижном носителе.
Кроме того, в качестве критериев перехода от одной ориентации к другой можно использовать погрешность, отличную от погрешности курса.
Например, для этого можно использовать погрешность положения цели Т, причем эту погрешность вычисляет модуль 8 определения местоположения в дополнение к собственно оценке положения цели Т. В этом случае предпочтительно первый порог выбирают меньшим или равным 10 метрам.
Такую погрешность положения, имеющую вид ковариации  , обычно вычисляет модуль 14 оценки следующим образом:
, обычно вычисляет модуль 14 оценки следующим образом:

где:
-  : ковариация навигационного состояния Е, оцененная блоком инерциальных датчиков (это состояние включает в себя данные положения и данные ориентации, оцененные во время этапа 102)
: ковариация навигационного состояния Е, оцененная блоком инерциальных датчиков (это состояние включает в себя данные положения и данные ориентации, оцененные во время этапа 102)
-  : ковариация шумов измерений при указании интересующей точки в системе координат камеры 2,
: ковариация шумов измерений при указании интересующей точки в системе координат камеры 2,
-  : ковариация шумов измерений при указании расстояния D между камерой 2 и целью (как правило, при помощи лазерного дальномера).
: ковариация шумов измерений при указании расстояния D между камерой 2 и целью (как правило, при помощи лазерного дальномера).
Это уравнение представляет собой простую сумму, так как погрешности являются независимыми.
Предпочтительно устройство 1 определения местоположения применяют на носителе типа летательного аппарата А, причем задачей этого носителя является определение местоположения целей на очень больших расстояниях, в частности, таким носителем является беспилотный летательный аппарат. Вместе с тем, такое устройство может быть установлено на других типах носителей: наземное транспортное средство, судно и т.д.
Устройство управления полетом для летательного аппарата
Оптоэлектронный прицел с модульной броневой защитой
Устройство соединения схемы или радиочастотного компонента, напечатанных на мягкой подложке, с коаксиальным проводом
Ротор электродвигателя с наружной оболочкой, образованной путем намотки, способ изготовления такого ротора и электродвигатель с таким ротором
Способ и моторизованное устройство наводки
Оптоэлектронная система наблюдения с переменным оптическим полем
Устройство ввода/вывода для передачи и/или приема данных на и/или от устройства управления
Блокируемый привод и соответствующий ограничитель момента
Способ геопозиционирования мобильных устройств, перемещающихся внутри замкнутой структуры
Электрическая система управления полетом для летательного аппарата

