Результат интеллектуальной деятельности: УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛЕТОМ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА
Вид РИД
Изобретение
Область техники
Изобретение относится к устройству управления полетом для летательного аппарата. Более конкретно, но не исключительно, изобретение относится к устройству управления полетом для трансформируемого летательного аппарата, т.е. такого, которое способно совершать вертикальный взлет и посадку.
Предшествующий уровень техники
Устройство управления полетом предназначено для управления движениями летательного аппарата на основе движений, сообщаемых пилотом ручке рулевого управления, соединенной с указанным устройством управления полетом. Тем не менее, и, в частности, в случае с трансформируемым летательным аппаратом пилот не должен пилотировать летательный аппарат одинаковым образом, когда летательный аппарат находится в состоянии полета, и когда он находится в стадии посадки или взлета, тем самым усложняя задачу пилотирования.
Таким образом, известен способ помощи пилоту, подразумевающий обеспечение устройства управления полетом, содержащего опору, поворотный рычаг, установленный на опоре так, чтобы он мог поворачиваться вокруг по меньшей мере одной оси вращения и предназначенный для прикрепления к ручке рулевого управления летательным аппаратом, и механическое средство для создания возвратного усилия на рычаге вокруг оси вращения, причем указанное средство содержит пружину и моторный элемент, расположенные таким образом, что первый конец пружины вынужден двигаться вращательно рычагом, а второй конец пружины вынужден двигаться вращательно выходным валом моторного элемента.
В результате, когда пилот двигает рычаг, пружина сжимается движением ее первого конца по отношению к ее второму концу, тем самым создавая возвратное усилие на ручке. Возвратное усилие, выработанное таким образом, предназначено для ограничения движений, сообщаемых пилотом ручке рулевого управления и, таким образом, для ограничения движений летательный аппарат. Изменяя положение второго конца пружины относительно первого конца пружины посредством моторного элемента, становится возможным двигать опорную точку пружины и, таким образом, изменять соотношение сил пружины, т.е. отношение, определяющее силы, прикладываемые механическим средством для создания возвратного усилия на рычаг. При таких обстоятельствах возможно изменять возвратное усилие, создаваемое в интересах пилота, в зависимости от стадии, в которой находится летательный аппарат: стадии полета, или стадии взлета или посадки. Таким образом, пилот ориентируется при пилотировании летательного аппарата посредством устройства управления полетом.
Тем не менее, изменение соотношения сил пружины посредством моторного элемента, когда пилот уже сообщает движение пружине через рычаг, вызывает изменение на опорной точке рычага, которое не обязательно будет желательным для пилота. Опорная точка остается точкой равновесия между стадией полета и рабочей нагрузкой на пилота.
Раскрытие изобретения
Задачей изобретения является создание устройства управления полетом для летательного аппарата, которое поможет устранить, хотя бы частично, указанные выше недостатки.
Для решения задачи устройство управления полетом для летательного аппарата согласно изобретению включает в себя:
опору;
рычаг, установленный с возможностью поворота на опоре так, чтобы он мог поворачиваться вокруг по меньшей мере одной оси вращения и предназначенный для прикрепления к ручке рулевого управления летательным аппаратом; и
механическое средство для создания возвратного усилия для рычага вокруг оси вращения, причем указанное возвратное средство содержит пружину и первый моторный элемент, расположенные таким образом, что первый конец пружины вынужден двигаться вращательно рычагом, а второй конец пружины вынужден двигаться вращательно выходным валом первого моторного элемента.
Согласно изобретению устройство включает в себя электрическую вспомогательную систему для содействия указанному механическому средству в создании возвратного усилия, причем система содержит второй моторный элемент, отличающийся от первого моторного элемента и расположенный таким образом, что его выходной вал вынужден двигаться вращательно первым концом пружины, при этом система включает в себя управляющее средство для управления вторым моторным элементом, чтобы изменять жесткость пружины во время эксплуатации с помощью второго моторного элемента.
Таким образом, поскольку первый моторный элемент позволяет двигать опорную точку пружины независимо от того, прикладывает ли пилот силу к рычагу, в случаях, когда желательно изменить соотношение сил указанной пружины, т.е. соотношение, определяющее силы, прикладываемые к пружине механическим средством для создания возвратного усилия, именно второй моторный элемент позволяет изменять указанное соотношение сил непрерывно и не меняя опорную точку пружины. Электрическая вспомогательная система, таким образом, позволяет более точно регулировать жесткость пружины (где это регулирование относится к кажущейся жесткости, поскольку истинная жесткость пружины является постоянной характеристикой пружины и не может быть изменена) путем сопротивления или содействия относительному перемещению первого конца пружины и второго конца пружины, вызванному тем, что пилот двигает ручку. Электрическая вспомогательная система, таким образом, предназначена для изменения значения жесткости пружины непрерывно, даже когда пилот уже прикладывает к рычагу крутящий момент, но без изменения опорной точки пружины.
Кроме того, электрическая вспомогательная система позволяет выполнять демпфирующую функцию пружины, поскольку она сопровождает относительное вращение двух концов пружины. В результате пружина не возвращается внезапно в состояние равновесия, как определено опорной точкой.
Благодаря указанной электрической вспомогательной системе становится возможным гораздо легче менять возвратное усилие, создаваемое устройством согласно изобретению.
Кроме того, эксплуатационные пределы различных элементов, соединенных друг с другом или приводимых в движение устройством управления полетом, могут разниться в течение полета в зависимости от стадии, в которой находится воздушное судно (полет, взлет или посадка). Преимущество устройства согласно изобретению состоит в том, что оно делает очень простым в эксплуатации изменение возвратного усилия для учета изменений эксплуатационных пределов, и соответствующее ограничение действий пилота путем увеличения жесткости пружины с помощью электрической вспомогательной системы.
Таким образом сопротивление, сообщаемое рычагу, возрастает, когда пилот двигает рычаг с помощью ручки, тем самым предупреждая пилота о приближении эксплуатационного предела для элементов, приводимых в движение или соединенных с указанным устройством управления полетом. Пилот затем может двигать ручку рулевого управления и, таким образом, рычаг, в другом направлении, чтобы почувствовать снижение сопротивления. Тем не менее, рычаг не блокируется, так что в экстренной ситуации пилот все же может перемещать рычаг, преодолевая сопротивление, сообщаемое рычагу, чтобы продолжить двигать рычаг.
Таким образом, устройство управления позволяет обеспечить пилота эффективной помощью в задаче кабрирования, и делать это интуитивно понятным способом, действуя посредством возвратного усилия.
Краткое описание чертежей
Изобретение станет более понятно из последующего описания на неограничивающем примере конкретного варианта его осуществления со ссылками на чертежи.
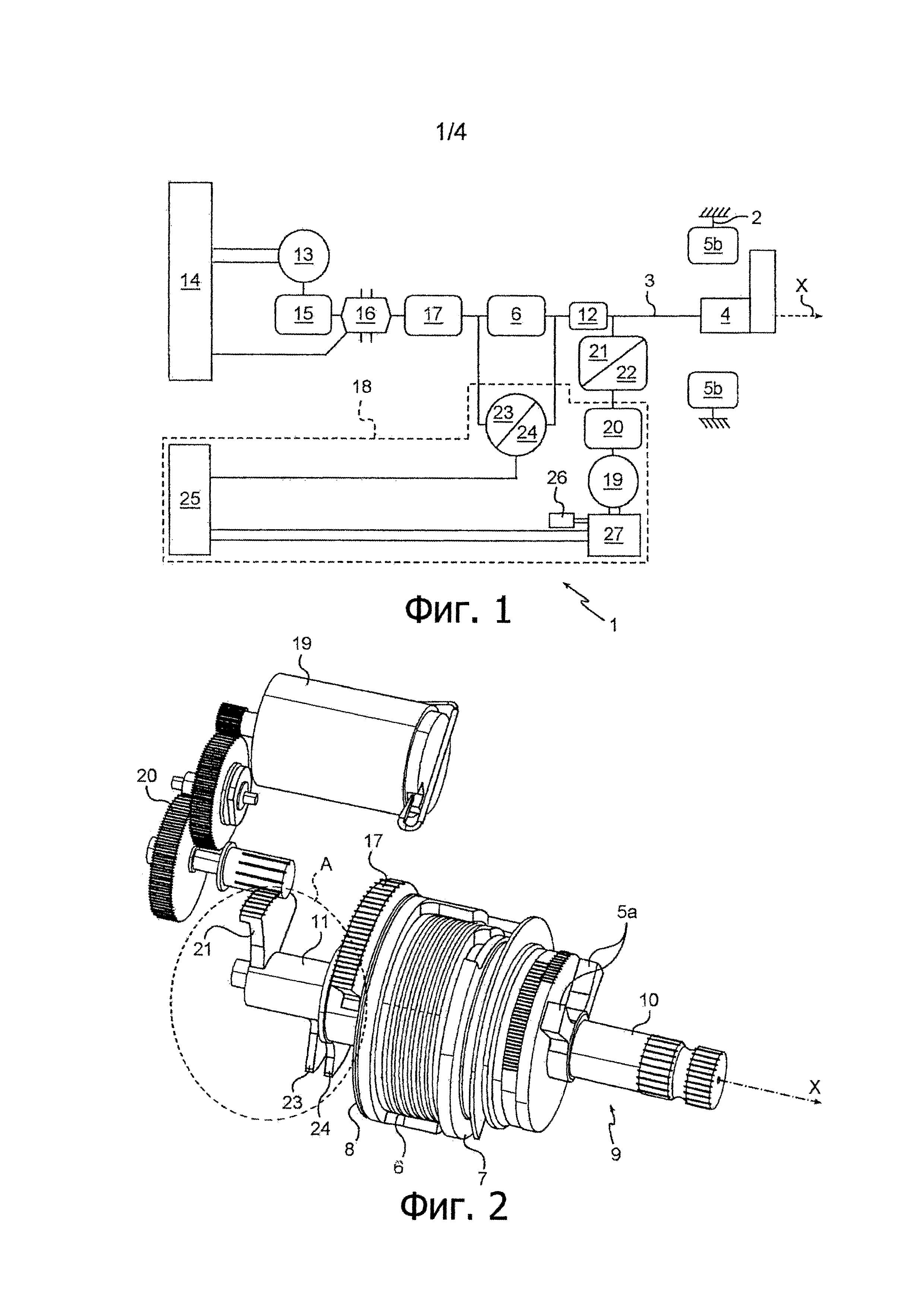
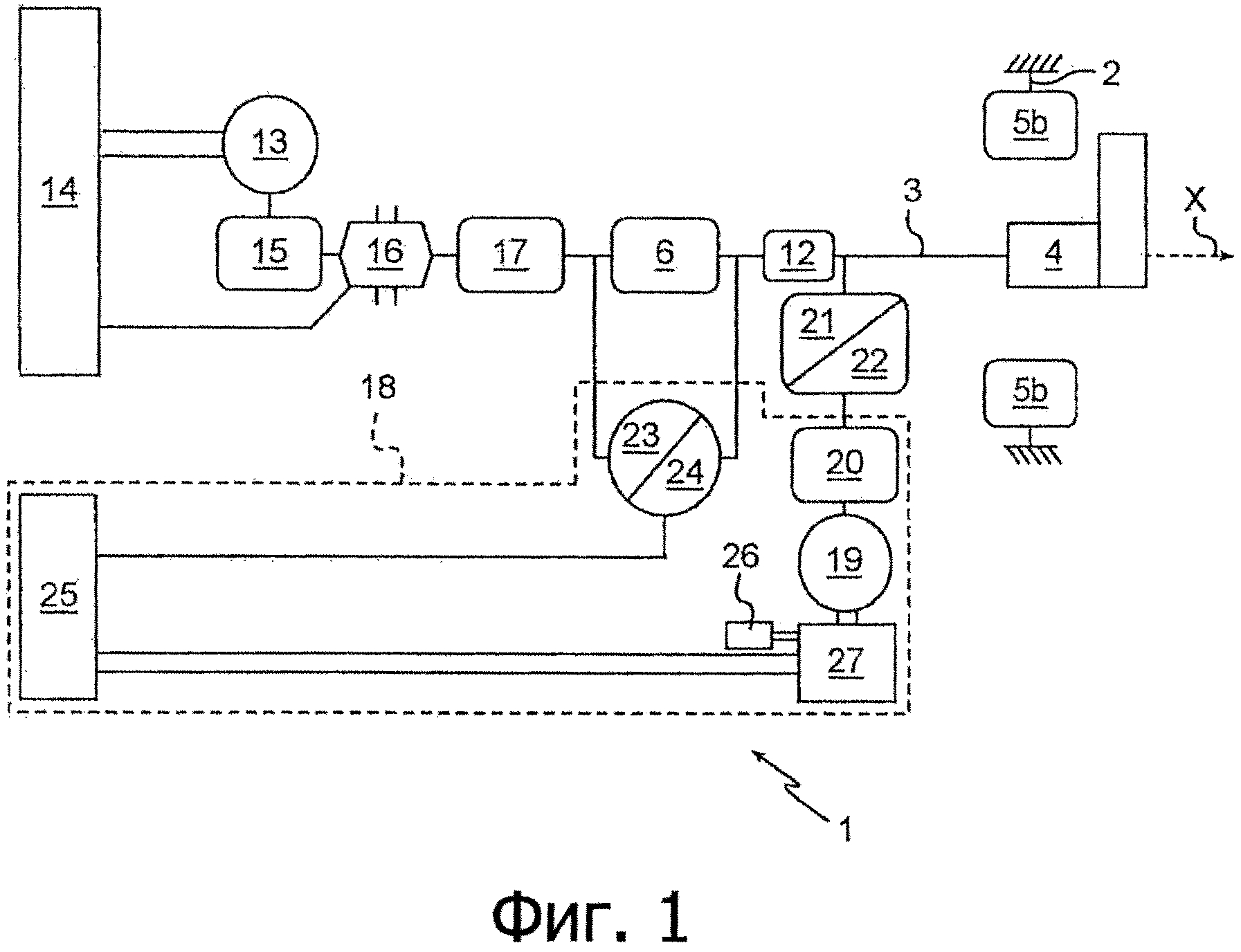
На фиг. 1 показано устройство управления полетом согласно изобретению, блок-схема;
на фиг. 2 - часть устройства управления полетом, показанного на фиг. 1, вид в перспективе;
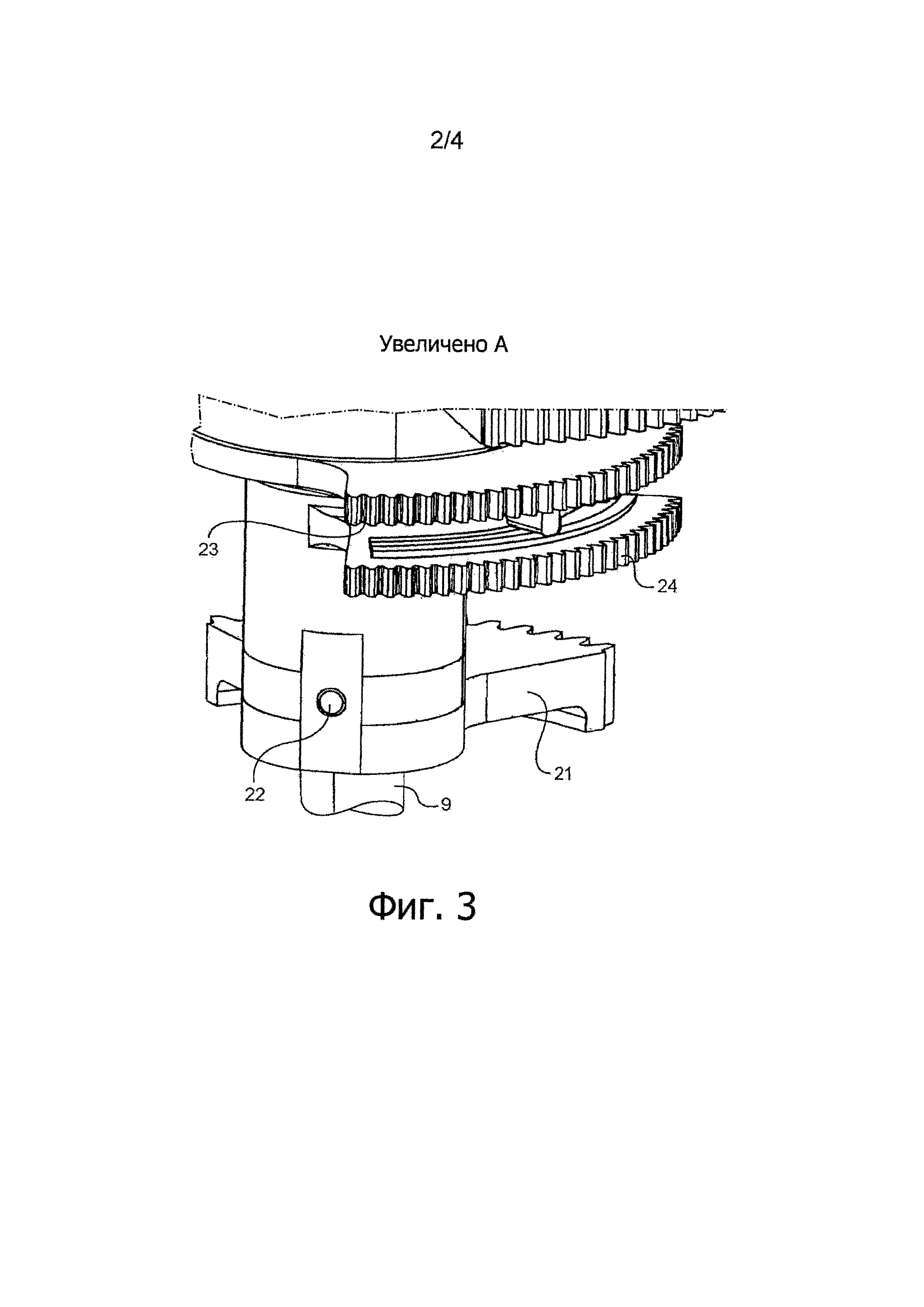
на фиг. 3 - часть фиг. 2 в увеличенном виде;
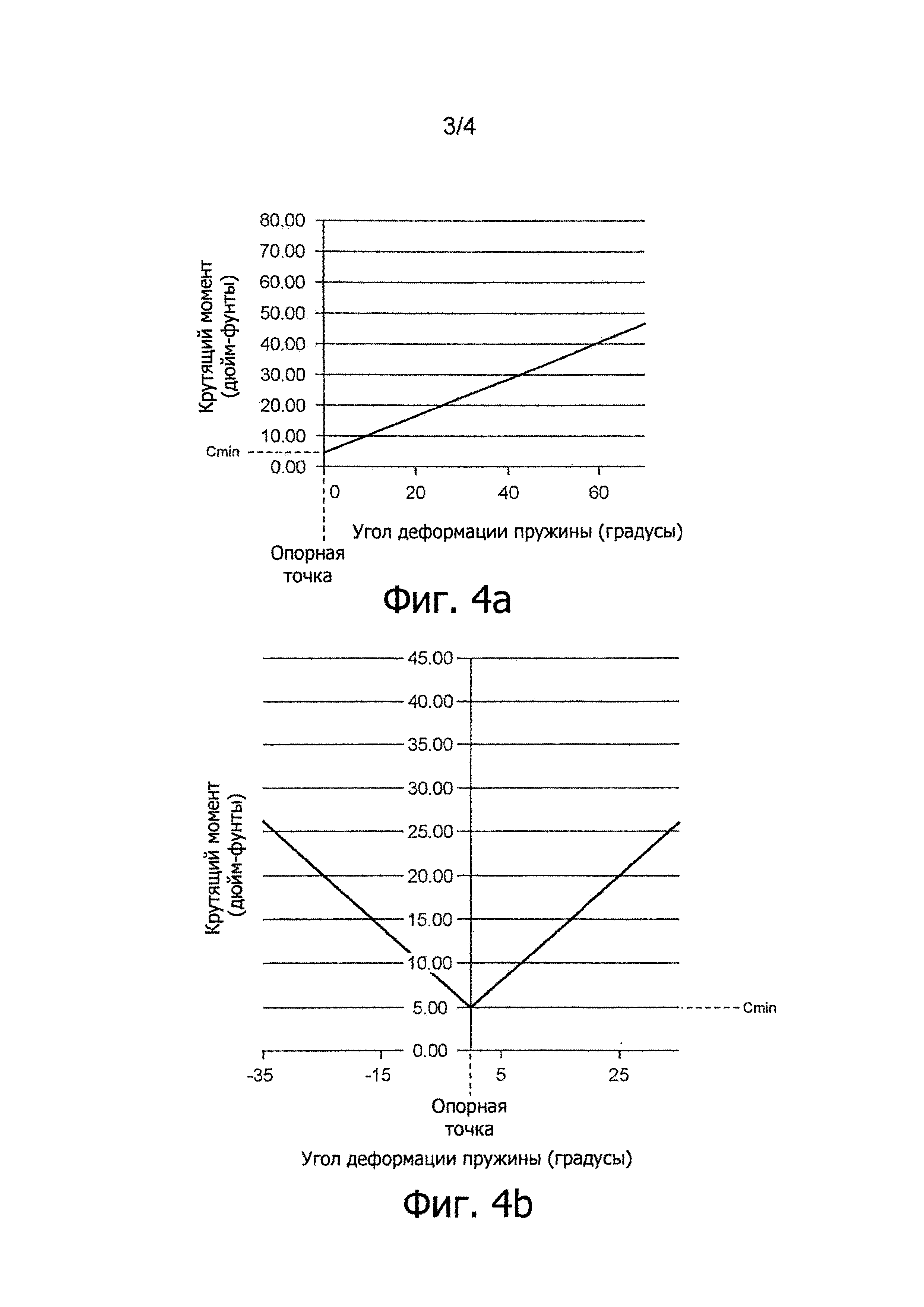
на фиг. 4а и 4b - соотношение сил пружины для устройства управления полетом на фиг. 1, соответственно, для первой конфигурации указанного устройства и для второй конфигурации указанного устройства;
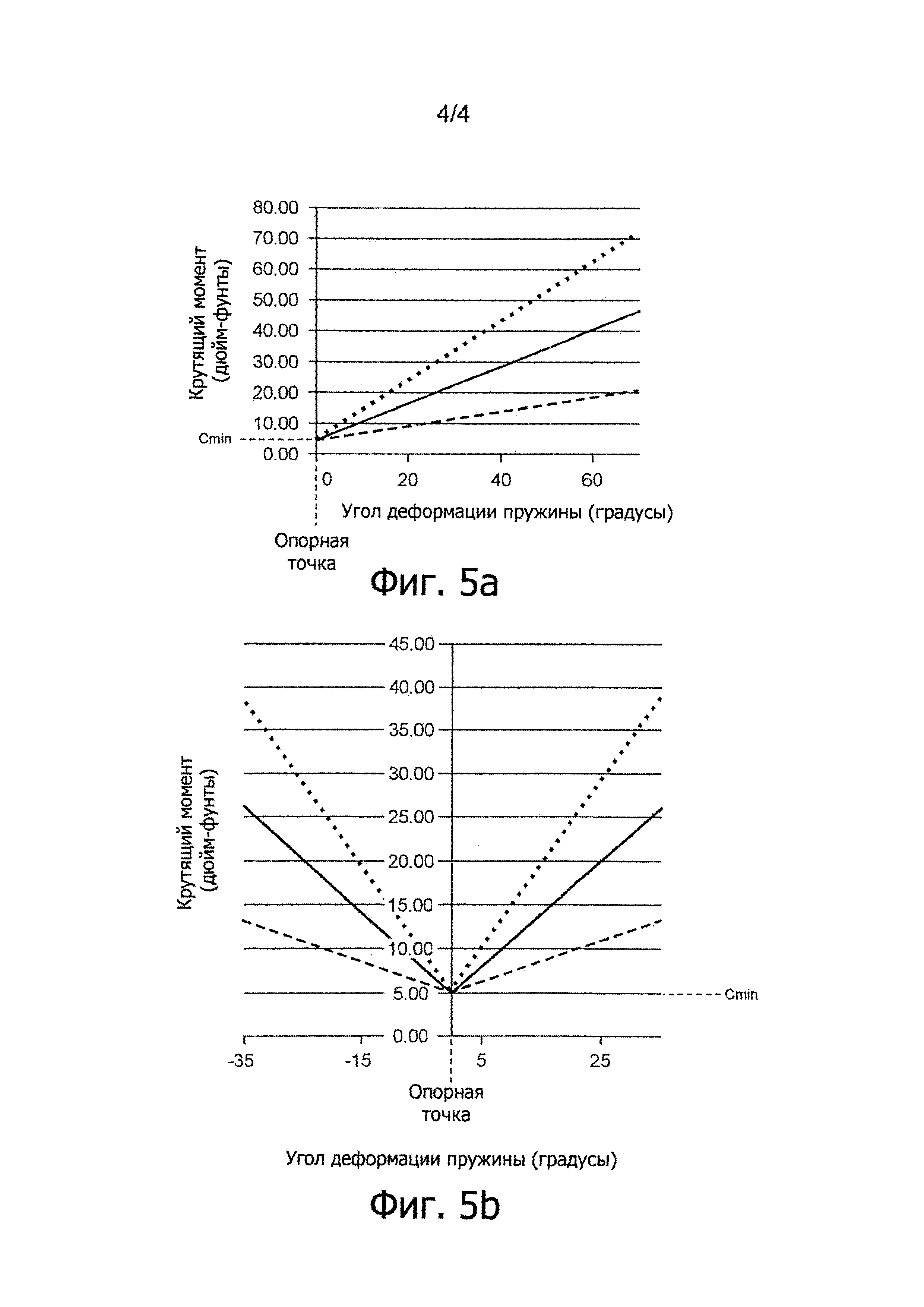
на фиг. 5а и 5b - графики, эквивалентные графикам на фиг. 4а и 4b, но дополнительно содержащие два измененных соотношения сил пружины во время воздействия на пружину электрической вспомогательной системы.
Варианты осуществления изобретения
Со ссылкой на фиг. 1-3 устройство 1 управления полетом согласно изобретению устанавливают на борту трансформируемого летательного аппарата в этом примере.
Устройство 1 управления полетом содержит опору 2 и поворотный рычаг 3, установленный на опоре так, чтобы поворачиваться вокруг по меньшей мере одной оси X вращения. В этом примере рычаг 3 соединен с ручкой 4 рулевого управления летательного аппарата для управления движением тангажа летательного аппарата.
Известным способом, устройство 1 управления полетом имеет механическое средство для ограничения углового хода рычага вокруг указанной оси X вращения. С этой целью рычаг 3 имеет два упора 5а, взаимодействующих с двумя соответствующими упорами 5b опоры 2, чтобы ограничить угловой ход рычага в первом и втором направлениях поворота вокруг оси X вращения.
Устройство 1 управления полетом также имеет механическое средство для создания возвратного усилия для возврата рычага 3 вокруг оси X вращения. Указанное средство содержит пружину 6, включающую в себя первый элемент 7 привода, прикрепленный к первому концу пружины 6, и второй элемент 8 привода, прикрепленный ко второму концу пружины 6. Пружина 6 является торсионной пружиной. Как правило, пружина 6 определяется соотношением сил (крутящим моментом как функцией угла деформации пружины), характеризующимся одной подобной функцией, когда пружина 6 может быть закручена только в одном направлении вращения, с учетом положения опорной точки для пружины 6, и определяющимся двумя подобными функциями при других обстоятельствах, когда пружина 6 может быть закручена в любом направлении вращения, причем каждая подобная функция связана с соответственной функцией направления скручивания пружины. Подобное соотношение (соотношения) характеризуется (характеризуются) следующим:
- значением ординаты на начальном этапе, а именно значением крутящего момента Cmin, который пилот должен приложить к рычагу 3, чтобы закрутить пружину 6, т.е. чтобы достичь относительного движения двух концов пружины 6; и
- управляющим коэффициентом, т.е. жесткостью пружины 6, умноженной на 1 или -1 в зависимости от направления скручивания пружины 6.
Значение крутящего момента Cmin, который пилот должен приложить к рычагу 3, чтобы закрутить пружину 6, а также жесткость пружины 6 являются характеристиками, постоянно присущими пружине 6 и независимыми от опорного положения пружины 6. В конкретном варианте осуществления пружина 6 выполнена так, чтобы иметь значение крутящего момента Cmin, который пилот должен приложить к рычагу, чтобы закрутить пружину, равное приблизительно 0,6 ньютонометра (Нм) (т.е. 5,32 дюйм-фунта). В этом примере пружина 6 также выполнена так, чтобы иметь жесткость 0,068 Нм на градус (т.е. 0,6 дюйм-фунта/градус).
Элемент 7 привода пружины 6 в этом примере расположен таким образом, чтобы он был вынужден двигаться во вращении с рычагом 3 вокруг оси X вращения.
В частности, рычаг 3 имеет стержень 9, проходящий вдоль оси X вращения внутри пружины 6, причем первый конец 10 стержня 9 проходит снаружи пружины 6 сквозь элемент 7 привода, а второй конец 11 стержня 9 проходит снаружи пружины 6 сквозь элемент 8 привода. Пружина 6, таким образом, вынуждена вращаться элементом 7 привода в зоне стержня 9, расположенной вровень с этим элементом 7 привода. И наоборот, элемент 8 привода и стержень 9 не соединены друг с другом. Стержень 9 также расположен таким образом, что первый конец стержня 9 вынужден двигаться вращательно ручкой 4 вокруг оси X вращения.
Пружина 6 предпочтительно прикреплена к стержню 9 посредством первого срезного штифта 12. В результате, в случае застревания одного из элементов механического средства для создания возвратного усилия или в экстренной ситуации пилот может приложить достаточный крутящий момент к рычагу 3, чтобы сломать первый срезной штифт 12 и, таким образом, отделить рычаг 3 от механического средства для создания возвратного усилия.
Механическое средство для создания возвратного усилия включает в себя первый моторный элемент 13.
Кроме того, устройство 1 управления полетом включает в себя первое управляющее средство 14 для управления первым моторным элементом 13 посредством управления электропитанием первого моторного элемента 13. Например, первое управляющее средство 14 содержит модуль электронного блока управления (ЭБУ). Первое управляющее средство 14 также принимает команды с компьютера управления полетом (КУП) для управления первым моторным элементом 13.
В частности, механическое средство для создания возвратного усилия включает в себя узел 15 передачи движения, который в этом примере содержит систему преобразования движения, такую как, но не исключительно, червячно-гаечный узел и нереверсивная система ступенчатого снижения.
Предпочтительно, указанное средство также включает в себя средство 16 временного сцепления.
Червяк вынужден вращаться выходным валом первого моторного элемента 13 и, таким образом, образует входной элемент узла 15 передачи движения. Выходной вал системы ступенчатого снижения образует выходной элемент указанного узла 15 передачи движения. Средство 16 временного сцепления в этом примере расположено между указанным выходным элементом и зубчатым сегментом 17, прикрепленным ко второму элементу 8 привода пружины 6.
В результате, выходной вал первого моторного элемента 13 вынужден двигаться вращательно указанным вторым элементом 8 привода через узел 15 передачи движения, средство 16 временного сцепления и зубчатый сегмент 17: вращение выходного вала первого моторного элемента 13, таким образом, сообщает вращение второму концу пружины 6 относительно первого конца пружины 6.
При таких обстоятельствах и независимо от движения, сообщаемого пилотом рычагу 3, возможно изменять положение второго конца пружины 6 относительно первого конца пружины 6, двигая второй элемент 8 привода с помощью первого моторного элемента 13. Это движение второго элемента 8 привода, таким образом, позволяет изменять положение опорной точки пружины 6 и, таким образом, изменять соотношение сил пружины 6.
Со ссылкой на фиг. 4, первый моторный элемент 13 может, таким образом, обеспечивать то, что опорная точка пружины 6 предотвращает скручивание пружины 6 в одном направлении вращения. Со ссылкой на фиг. 4b, первый моторный элемент 13 может также воздействовать на пружину 6 так, что ее опорная точка центрирована, т.е. так, что возможно скручивать пружину 6 через угол деформации одинаковой величины в каждом направлении скручивания. Можно видеть, что для двух положений опорных точек значение крутящего момента Cmin, который пилот должен приложить к рычагу 3, чтобы заставить пружину 6 скрутиться, и жесткость пружины 6 остаются идентичны. Первый моторный элемент 13, таким образом, не обеспечивает средство для действия по этим двум параметрам.
Устройство управления полетом предпочтительно включает в себя механические упоры (не показаны), ограничивающие относительное движение двух концов пружины, чтобы не позволить первому моторному элементу 13 повредить пружину 6, сместив опорную точку за пределы конструкционных ограничений пружины 6.
Кроме того, когда первый моторный элемент 13 не подключен к питанию, если пилот прикладывает к рычагу 3 крутящий момент, превышающий крутящий момент Cmin, затем пилот заставляет первый конец пружины 6 двигаться относительно ее второго конца, тем самым сжимая пружину 6 и, таким образом, создавая возвратное усилие на рычаге 3. Это позволяет воспроизвести принудительный возврат.
Когда средство 16 временного сцепления деактивировано, пружина 6 больше не сцеплена с первым моторным элементом 13 и, таким образом, возвращается к недеформированному состоянию покоя, поскольку первый моторный элемент 13 больше не прикладывает давление к ее опорной точке. Возвратное усилие, следовательно, больше не может создаваться механическим средством для создания возвратного усилия.
Согласно изобретению устройство 1 управления полетом включает в себя электрическую вспомогательную систему 18 для помощи указанному механическому средству в создании возвратного усилия.
Электрическая вспомогательная система 18 включает в себя второй моторный элемент 19, отличающийся от первого моторного элемента 13. К примеру, второй моторный элемент 19 является двигателем постоянного тока со скользящими контактами.
В этом примере электрическая вспомогательная система 18 включает в себя узел 20 ступенчатого снижения, расположенный между выходным валом второго моторного элемента 19 и зубчатым сегментом 21, прикрепленным ко второму концу 11 стержня 9 рычага 3, причем рычаг 3 сам вынужден двигаться вращательно первым элементом 7 привода в зоне стержня 9, расположенной вровень с первым элементом 7 привода.
Таким образом, выходной вал второго моторного элемента 19 вынужден двигаться вращательно первым элементом 7 привода посредством узла 20 ступенчатого снижения, зубчатого сегмента 21 и рычага 3: вращение выходного вала второго моторного элемента 19, таким образом, сообщает вращение первому концу пружины 6 относительно второго конца пружины 6.
В конкретном варианте осуществления зубчатый сегмент 21 прикреплен к стержню 9 посредством второго срезного штифта 22. В результате, в случае застревания одного из элементов электрической вспомогательной системы 18 или в экстренной ситуации пилот может приложить достаточный крутящий момент к рычагу 3, чтобы сломать второй срезной штифт 22 и, таким образом, отделить электрическую вспомогательную систему 18 от рычага 3 и механического средства для создания возвратного усилия. Второй срезной штифт 22 предпочтительно выполнен так, чтобы иметь порог прочности меньше, чем у первого срезного штифта 12. В результате, в случае проблемы в электрической вспомогательной системе или в экстренной ситуации пилот может приложить достаточный крутящий момент к рычагу 3, чтобы сломать второй срезной штифт 22, не повредив первый срезной штифт 12. Это приводит к режиму ограниченной функциональности, являющемуся чисто механическим, в котором рычаг 3 соединен только с механическим средством для создания возвратного усилия, при этом пружина 6 может быть деформирована только рычагом 3 или первым моторным элементом 13.
В штатном режиме пружина 6 соединена своим первым концом с рычагом 3 и со вторым моторным элементом 19, а своим вторым концом - с первым моторным элементом 13. Как указанно выше, второй конец пружины 6 может смещаться относительно первого конца пружины 6 первым моторным элементом 13, чтобы изменить опорную точку пружины 6, даже в то время, когда к рычагу 3 прикладывается сила пилотом или вторым моторным элементом 19.
Кроме того, первый конец пружины 6 может смещаться относительно второго конца пружины 6 посредством рычага 3 одновременно пилотом и вторым моторным элементом 19, что, таким образом, может противодействовать или содействовать движению, сообщаемому рычагу 3 пилотом. Электрическая вспомогательная система 18, таким образом, предназначена для изменения кажущейся жесткости пружины 6, чтобы увеличить возвратное усилие, прикладываемое к рычагу 3, или, наоборот, уменьшить возвратное усилие, прикладываемое к рычагу 3 пружиной 6. Как можно более четко видеть на фиг. 5а и 5b, электрическая вспомогательная система 18, таким образом, позволяет изменять кажущееся соотношение сил пружины 6, изменяя значение (абсолютное) уклона подобных функций, характеризующих указанное соотношение сил либо путем создания приводящего крутящего момента на рычаге 3, либо посредством создания противодействующего крутящего момента на рычаге 3 (см. кривые, нанесенные линейным и точечным пунктиром).
Для этой цели устройство 1 управления полетом имеет первый датчик 23 углового движения, расположенный в связи с пружиной 6, чтобы оценивать относительное положение первого конца и второго конца пружины 6. К примеру, первый датчик 23 содержит потенциометр.
Предпочтительно, и чтобы обеспечить избыточность, устройство 1 управления полетом также имеет второй датчик 24 углового движения, расположенный в связи с пружиной 6, чтобы оценивать относительное положение первого конца и второго конца пружины 6. К примеру, второй датчик 24 может представлять собой датчик типа синус-косинусного вращающегося трансформатора (СКВТ).
Устройство 1 управления полетом также имеет второе управляющее средство 25 для управления вторым моторным элементом 19 посредством управления электропитанием второго моторного элемента 19 и, таким образом, управления движением второго конца пружины 6 относительно первого конца пружины 6, чтобы изменять силу, создаваемую пружиной 6 на рычаге 3. Например, второе управляющее средство 25 для второго моторного элемента 19 содержит электронный управляющий модуль, интерфейс связи с компьютером управления полетом для того, чтобы, в частности, принимать от указанного компьютера заданные величины, и интерфейсы связи с первым датчиком 23 и со вторым датчиком 24. В этом примере второе управляющее средство 25 для второго моторного элемента 19 отличается от первого управляющего средства 14 для первого моторного элемента 13. Преимущество состоит в том, что в случае потери второго управляющего средства 25 остается возможность вернуться в режим ограниченной функциональности, являющийся чисто механическим, в котором принудительный возврат создается только с помощью механического средства для создания возвратного усилия.
Второе управляющее средство 25, таким образом, приводит в действие второй моторный элемент 19 в качестве функции, в частности, данных, выведенных первым датчиком 23 и вторым датчиком 24 (позволяя оценить силу, приложенную к пружине 6, положение опорной точки пружины 6 и то, работает ли пилот ручкой управления), и заданных величин, переданных компьютером управления полетом, чтобы ослабить или усилить соотношение сил, определяемое пружиной.
Предпочтительно, второе управляющее средство 25 приводит в действие второй моторный элемент 19, чтобы ослабить или усилить соотношение сил, определяемое пружиной 6, в зависимости от стадии полета, в которой находится трансформируемый летательный аппарат (набор высоты, снижение, полет).
В частном варианте осуществления электрическая вспомогательная система 18 включает в себя резистор 26 и соединительное средство 27 для соединения второго моторного элемента 19 либо с резистором 26, либо со вторым управляющим средством 25. Когда второй моторный элемент 19 соединен с резистором 26, он действует как генератор во время движения первого конца пружины 6 относительно второго конца пружины 6, причем электроэнергия, вырабатываемая вторым моторным элементом 19, затем рассеивается благодаря эффекту Джоуля в резисторе 26. Это служит для ослабления движения рычага 3 и, таким образом, позволяет избежать внезапного возврата пружины в опорное положение.
Далее описан один из способов использования устройства.
В штатном режиме компьютер управления полетом вырабатывает командную заданную величину для второго управляющего средства 25.
Когда абсолютное значение заданной величины остается ниже первого порога (например, 1 В постоянного тока); или информация, выведенная первым датчиком 23 и вторым датчиком 24 на второе управляющее средство 25, указывает, что абсолютное значение относительной деформации между первым концом пружины 6 и вторым концом пружины 6 меньше, чем второй порог, поскольку крутящий момент приложен пилотом к пружине 6 (причем второй порог, например, установлен на 0,5 градуса); то соединительное средство 27 соединяет второй моторный элемент 19 с резистором 26 для обеспечения пассивного гашения колебаний).
Когда абсолютное значение заданной величины, выработанной компьютером управления полетом, располагается между первым порогом и третьим порогом (установленным, например, на 10 В постоянного тока); или информация, выведенная первым датчиком 23 и вторым датчиком 24 на второе управляющее средство 25, показывает, что абсолютное значение относительной деформации между первым концом пружины 6 и вторым концом пружины 6 превышает второй порог, поскольку крутящий момент приложен пилотом к пружине 6; то соединительное средство 27 соединяет второй моторный элемент 19 со вторым управляющим средством 25 так, чтобы привести в действие второй моторный элемент 19 таким образом, чтобы изменить кажущуюся жесткость пружины 6, жесткость которой затем определяется следующим образом:
k'=k+α×Vsetpoint,
где k' является значением кажущейся жесткости пружины 6;
k является значением истинной жесткости пружины 6 (в этом примере 0,068 Нм на градус);
α является заранее заданным коэффициентом коррекции (например, 0,37 Нм на градус в этом примере); и
Vsetpoint является реальным (в отличие от абсолютного) значением заданной величины, выработанной компьютером управления полетом.
Естественно, изобретение не ограничено описанным вариантом осуществления, и различные варианты осуществления могут быть обеспечены без отхода от объема изобретения, определенного формулой изобретения.
В частности, хотя описание относится к устройству управления полетом, связанным с управлением тангажом или с трансформируемым летательным аппаратом, это применение не является ограничительным, и устройство управления полетом согласно изобретению может быть использовано для любого другого применения, например, такого как управление тангажом, креном, вращением вокруг вертикальной оси или общим шагом винта в вертолете или в самолете, или в любом другом летательном аппарате.
Хотя первое управляющее средство и второе управляющее средство в этом примере отличаются, возможно рассмотреть управление первым моторным элементом и вторым моторным элементом с помощью единого управляющего средства. Хотя второе управляющее средство в этом примере имеет единый ЭБУ, второе управляющее средство может иметь ЭБУ для каждого из полюсов второго моторного элемента.
Соединения между моторными элементами и пружиной могут отличаться от описанных. Например, электрическая вспомогательная система может также включать в себя ограничитель момента трения, расположенный между вторым моторным элементом и первым элементом привода.
Датчики могут отличаться от описанных. Например, один или оба датчика могут содержать потенциометр.
Соединения между моторными элементами и пружиной могут в некоторых случаях включать в себя механический элемент сцепления, предназначенный либо для защиты рычага от застревания при вращении вокруг оси X посредством отделения одной или всех подфункций (подфункции механического создания возвратного усилия и подфункции обеспечения электрической помощи), либо для того, чтобы позволить опорной точке быстро смещаться произвольным действием пилота при надлежащем управлении посредством одного или другого управляющего средства.
Таким образом, хотя в этом примере моторные элементы соединены с пружиной посредством соответственных срезных штифтов, один или другой из двух моторных элементов могут быть соединены с пружиной посредством любого другого разъемного устройства и вообще посредством элемента сцепления любого типа (такого как муфта сцепления). В одном из вариантов один или другой из двух моторных элементов может быть соединен напрямую с пружиной без элемента сцепления или, точнее, без какого-либо разъемного устройства. Например, механическое средство для создания возвратного усилия не обязательно включает в себя временное средство сцепления в качестве элемента сцепления. Средство для создания возвратного усилия не обязательно включает в себя срезной штифт. Электрическая вспомогательная система не обязательно включает в себя срезной штифт.
Вообще соединения между моторными элементами и пружиной могут отличаться от описанных соединений. Таким образом, средство для создания возвратного усилия не обязательно включает в себя нереверсивную систему ступенчатого снижения.
Хотя в этом примере пружина выполнена так, чтобы иметь значение крутящего момента Cmin, который пилот должен приложить к рычагу, чтобы закрутить пружину, равное 0,6 Нм, это значение может быть другим, например, оно может быть равно 1 Нм. Аналогично, хотя в этом примере пружина выполнена так, чтобы иметь жесткость 0,068 Нм на градус, это значение может быть другим, например, оно может быть равно 0,1 Нм на градус.
Предпочтительный коэффициент α коррекции также может иметь значение, отличное от описанного, например, оно может быть 0,05 Нм на градус.
Электромеханический привод с антиблокировочным средством
Магнитный тормоз с уменьшенным ступенчатым гистерезисом
Оптоэлектронный прицел с модульной броневой защитой
Устройство соединения схемы или радиочастотного компонента, напечатанных на мягкой подложке, с коаксиальным проводом
Ротор электродвигателя с наружной оболочкой, образованной путем намотки, способ изготовления такого ротора и электродвигатель с таким ротором
Способ и моторизованное устройство наводки
Оптоэлектронная система наблюдения с переменным оптическим полем
Устройство ввода/вывода для передачи и/или приема данных на и/или от устройства управления
Блокируемый привод и соответствующий ограничитель момента
Способ геопозиционирования мобильных устройств, перемещающихся внутри замкнутой структуры
Электромеханический привод с антиблокировочным средством
Магнитный тормоз с уменьшенным ступенчатым гистерезисом

