Результат интеллектуальной деятельности: АНТРОПОМОРФНЫЙ МАНИПУЛЯТОР ДЛЯ ИСПОЛЬЗОВАНИЯ НА БЕСПИЛОТНОМ ЛЕТАТЕЛЬНОМ АППАРАТЕ
Вид РИД
Изобретение
Изобретение относится к робототехнике, а именно к захватным головкам, приводимым действие сервомеханизмами, и может быть использовано в качестве механизма захвата высокой степени точности для переноса объектов беспилотными летательными аппаратами.
Из уровня техники известен манипулятор (SU 1546248 A1, МПК B25J 3/04, опубл. 28.02.1990), содержащий основание, ложемент под локоть оператора и рукоятку для кисти, при этом ложемент и рукоятка между собой и основанием кинематически связаны рычажно-шарнирным механизмом с возвратными пружинами, а каждый механизм представляет собой рычаг с двумя взаимно перпендикулярными шарнирами. Ложемент, кроме того, дополнительно соединен с основанием шарнирным параллелограммом.
Недостатком известного технического решения является сложность конструкции в силу избыточного количества звеньев-элементов шарнирно-рычажных механизмов и кинематических пар.
Наиболее близким техническим решением к заявленному изобретению и выбранным в качестве прототипа признан антропоморфный манипулятор (RU 146552 U1, МПК B25J 3/00, опубл. 10.10.2014). Механизм содержит исполнительное и задающее устройства, выполненные с возможностью закрепления, соответственно, на основании и корпусе оператора, и приборы для замера относительного движения звеньев задающего устройства. Задающее устройство выполнено по схеме, включающей плечо, предплечье и кисть, причем на предплечье размещен ложемент для соединения его с предплечьем оператора, а плечо образовано двумя звеньями с возможностью соединения первого из них с корпусом оператора через универсальный шарнир, а второго - с предплечьем.
Недостатком манипулятора является его низкая технологичность, обусловленная сложностью конструкции механизма, что дополнительно увеличивает вес и стоимость устройства.
Технической задачей, на решение которой направлено заявленное изобретение, является разработка антропоморфного манипулятора, предназначенного для использования в качестве механизма захвата на беспилотном летательном аппарате.
Указанная задача решена тем, что антропоморфный манипулятор содержит первый П-образный кронштейн, выполненный с возможностью закрепления на корпусе беспилотного летательного аппарата (БПЛА), на котором закреплен первый сервопривод, обеспечивающий вращение манипулятора вокруг оси X. На валу первого сервопривода первым концом установлен Х-образный кронштейн, на втором конце которого закреплен второй сервопривод, обеспечивающий вращение манипулятора вокруг оси Y. На валу второго сервопривода установлены подвижные звенья, включающие в себя плечо манипулятора, локтевой сустав, предплечье, кистевой сустав, запястье и кисть. При этом локтевой сустав выполнен заодно с плечом и представляет собой второй П-образный кронштейн с закрепленным в нем третьим сервоприводом, на валу которого установлено предплечье. Кистевой сустав выполнен в виде планки, на одном конце которой закреплен третий П-образный кронштейн с закрепленным в нем четвертым сервоприводом, вал которого установлен в четвертом П-образном кронштейне, установленном на валу пятого сервопривода, закрепленного на предплечье, а на втором конце упомянутой планки закреплен шестой сервопривод, на валу которого шарнирно закреплена кисть, содержащая пять подвижных пальцев, управляемых микросервоприводами, выполненная с возможностью захвата предметов. Дополнительно манипулятор снабжен блоком управления, выполненным на основе микроконтроллера, силовые выходы которого подключены к сервоприводам и микросервоприводам манипулятора.
Положительным техническим результатом, обеспечиваемым раскрытой выше совокупностью признаков антропоморфного манипулятора, является возможность его установки на беспилотные летательные аппараты для транспортирования небольших грузов. Это достигается за счет большого числа степеней свободы подвижных звеньев и пальцев кисти манипулятора. Дополнительным техническим результатом является возможность использования устройства совместно с БПЛА для выполнения манипуляций в опасных для человека зонах.
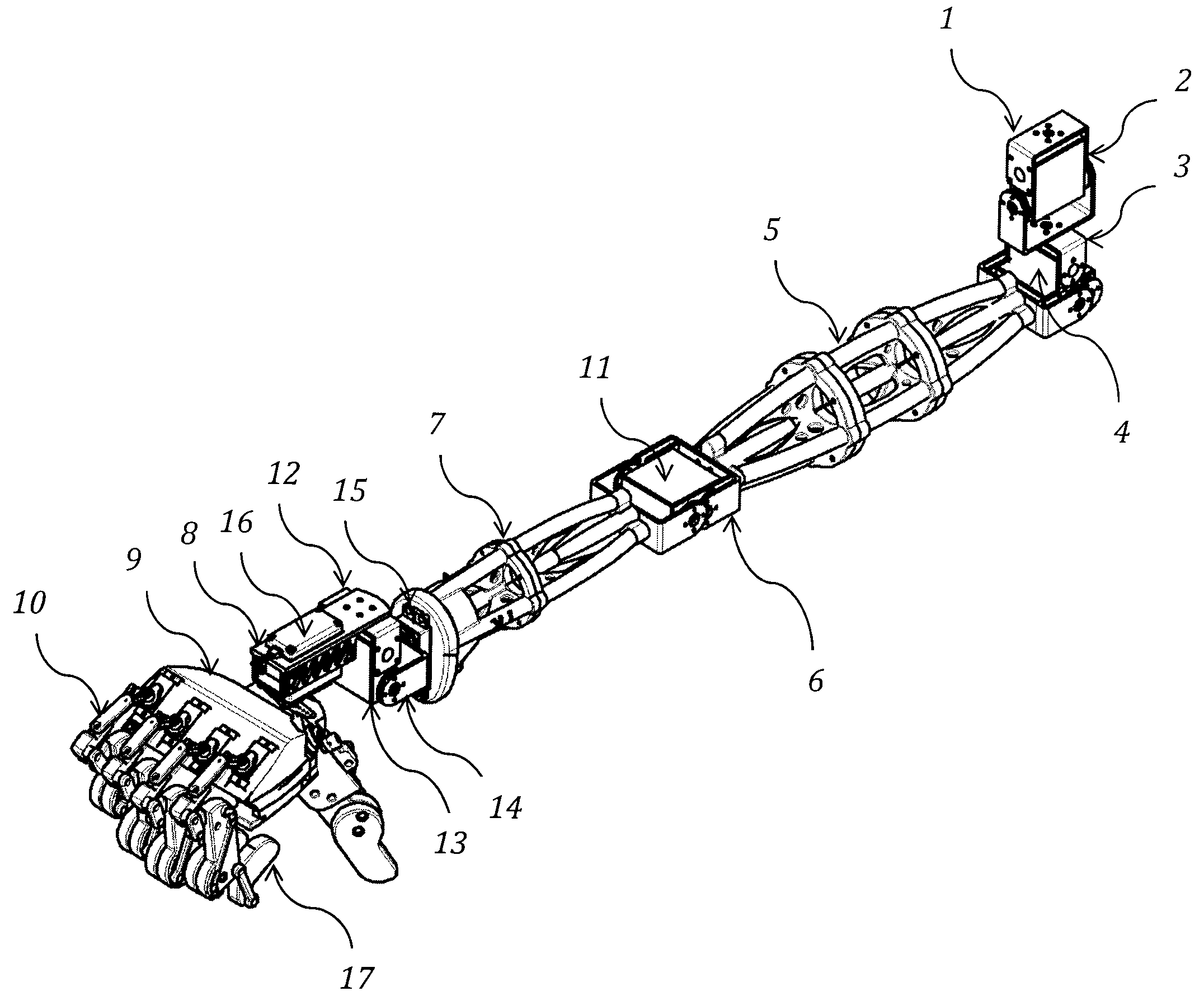
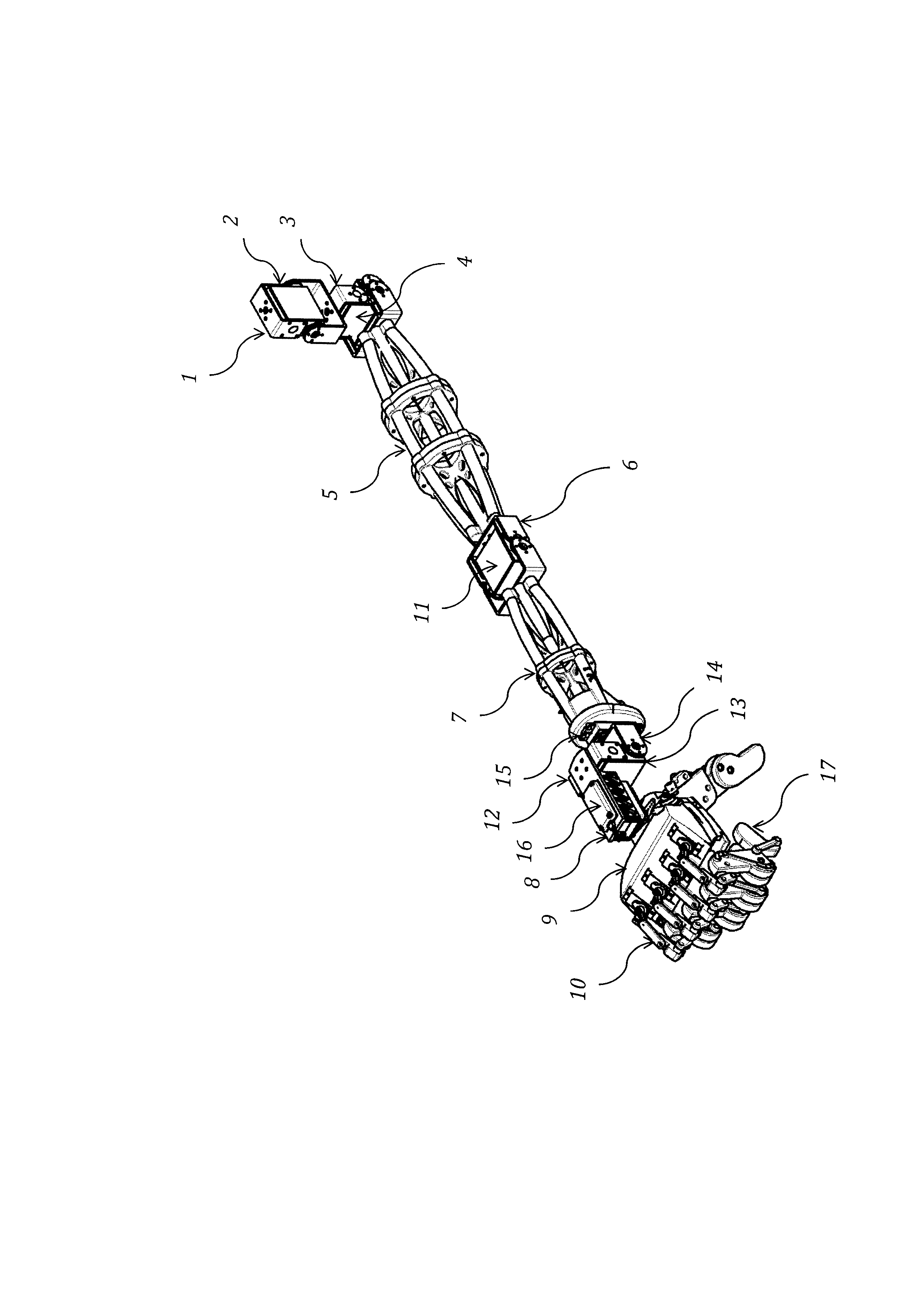
Конструкция антропоморфного манипулятора поясняется чертежом, где на фигуре показан его внешний вид в изометрии.
Антропоморфный манипулятор устроен следующим образом. Его основой является первый П-образный кронштейн 1, выполненный с возможностью закрепления на корпусе беспилотного летательного аппарата (БПЛА), на котором закреплен первый сервопривод 2, обеспечивающий вращение манипулятора вокруг оси X. На валу первого сервопривода 2 первым концом установлен Х-образный кронштейн 3, на втором конце которого закреплен второй сервопривод 4, обеспечивающий вращение манипулятора вокруг оси Y. На валу второго сервопривода 4 установлены подвижные звенья, включающие в себя плечо манипулятора 5, локтевой сустав 6, предплечье 7, кистевой сустав 8, запястье 9 и кисть 10. При этом локтевой сустав 6 выполнен заодно с плечом 5 и представляет собой второй П-образный кронштейн с закрепленным в нем третьим сервоприводом 11, на валу которого установлено предплечье 7. Кистевой сустав 8 выполнен в виде планки, на одном конце которой закреплен третий П-образный кронштейн 12 с закрепленным в нем четвертым сервоприводом 13, вал которого установлен в четвертом П-образном кронштейне 14, установленном на валу пятого сервопривода 15, закрепленного на предплечье 7, а на втором конце упомянутой планки закреплен шестой сервопривод 16, на валу которого шарнирно закреплена кисть 10, содержащая пять подвижных пальцев 17, управляемых микросервоприводами (на фигурах условно не показаны), выполненная с возможностью захвата предметов.
Плечо 5 и предплечье 7 выполнены в виде пустотелых продуваемых бочкообразных каркасов с использованием ребер жесткости с отверстиями, что обеспечивает нахождение центра тяжести в середине звеньев, кроме того позволяет реализовать конструкцию достаточно легкой с удовлетворительными аэродинамическими характеристиками. Звенья манипулятора могут быть изготовлены, например, из пластика с помощью 3D-печати.
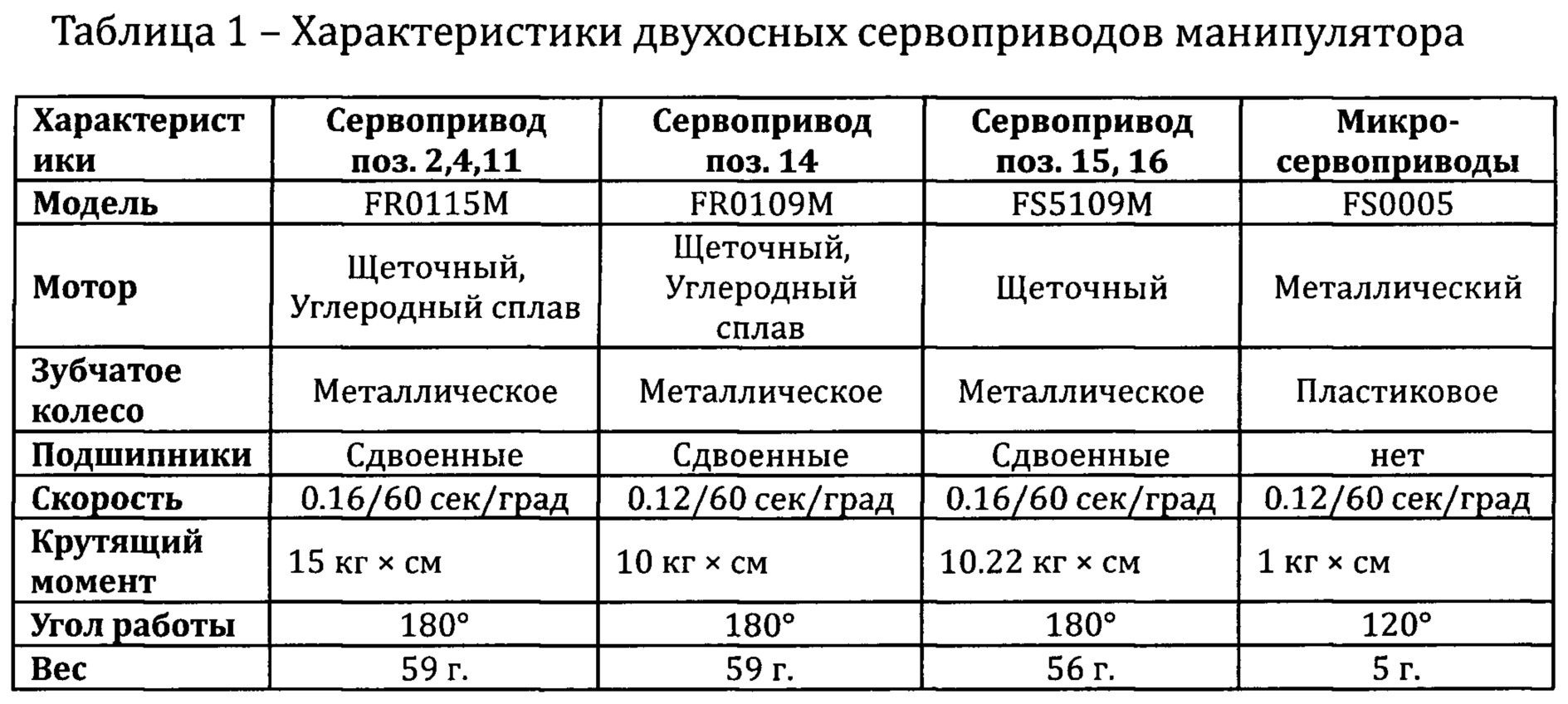
В качестве сервоприводов в сочленениях целесообразно применять двуосные сервоприводы с механизмом саморегуляции для достижения стабильности позиционирования манипулятора под нужным углом (таблица 1).
Микроконтроллер блока управления (на фигуре условно не показан) может быть выполнен на основе микросхемы STM8L152, построенной на высокопроизводительном ядре STM8, и содержит микропроцессорное ядро, соединенное с помощью системной шины с FLASH-памятью программ, SRAM-памятью данных, энергонезависимой электрически перепрограммируемой памятью EEPROM, универсальными восьмиразрядными двунаправленными портами ввода-вывода, подключенными к силовым выходам блока управления, и универсальным синхронно-асинхронным приемопередатчиком USART, к которому подключен радиомодуль, в качестве которого целесообразно использовать микросхему НС-12.
Антропоморфный манипулятор работает следующим образом. Первоначально манипулятор закрепляют на корпусе беспилотного летательного аппарата с помощью первого П-образного кронштейна 1. Далее подключают блок управления к бортовой электрической сети летательного аппарата, а силовые выходы блока управления соединяют с сервоприводами плеча, предплечья и суставов, а также к микросервоприводам, управляющим пальцами кисти. Рабочую частоту радиомодуля блока управления выбирают в диапазоне от 433,4 до 473,0 МГц, настраивая аналогичным образом командный передатчик беспилотного летательного аппарата.
При выполнении полетного задания, связанного с транспортировкой груза, с помощью радиоканала с наземной станции управления беспилотным летательным аппаратом беспилотному летательному аппарату передают последовательность команд на выполнение маневра снижения над грузом и выполнения его захвата и подъема манипулятором. Командный передатчик ретранслирует полученные команды блоку управления антропоморфного манипулятора, а последний преобразует их в последовательность управляющих импульсов и передает через силовые выходы на сервоприводы и микросервоприводы манипулятора, обеспечивая тем самым надежный захват груза и его подъем.
При достижении беспилотным летательным аппаратом пункта назначения ему передают последовательность команд на выполнение маневра снижения. Аналогично описанному выше командный передатчик ретранслирует полученные команды блоку управления антропоморфного манипулятора, а последний преобразует их в последовательность управляющих импульсов и передает через силовые выходы на сервоприводы и микросервоприводы манипулятора, обеспечивая разжим его звеньев и опускание груза на погрузочно-разгрузочную площадку.
Зубчатая планетарная передача
Способ производства термоупрочненной проволоки из стали
Способ изготовления бюгельного протеза
Индукционный ускоритель
Экспедиционный генератор
Многорядная планетарная передача
Способ измерения мощности и частоты импульсов лазерного излучения и устройство для его осуществления
Система обеспечения безопасности на железнодорожном транспорте
Волновая передача
Способ экологического мониторинга химически опасных объектов в закрытых помещениях

