Результат интеллектуальной деятельности: УПРАВЛЕНИЕ УСТРОЙСТВАМИ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ
Вид РИД
Изобретение
Предпосылки создания изобретения
[0001] Некоторое оборудование и устройства, такие как энергетическое оборудование и устройства, нефтяное и газовое оборудование и устройства, авиационное оборудование и устройства, промышленное оборудование и устройства и т.п., включают множество взаимодействующих систем и процессов. Например, электростанции могут включать турбинные установки и процессы для использования и обслуживания турбинных установок. Аналогично, работы по добыче нефти и газа могут включать системы добычи углеводородного топлива и технологическое оборудование, соединенные посредством трубопроводов. Точно так же авиационные системы могут включать самолеты и ангары для технического обслуживания, используемые для поддержания полетопригодности и обеспечения технического обслуживания самолетов. Во время эксплуатации оборудования оно может ухудшить свои параметры, столкнуться с нежелательными явлениями, такими как коррозия, износ и т.п., которые потенциально влияют на общую эффективность оборудования. Некоторые методы контроля, такие как неразрушающий контроль (Non-Destructive Testing, NDT) или неразрушающая проверка могут использоваться, чтобы обнаруживать нежелательные состояния оборудования. Было бы выгодно улучшить управление устройствами NDT.
Сущность изобретения
[0002] Некоторые формы осуществления изобретения, соответствующие первоначально заявленному объему изобретения, кратко изложены ниже. Эти формы осуществления изобретения не предназначены для ограничения объема заявляемого изобретения, а напротив эти формы осуществления изобретения предназначены только для того, чтобы представить краткую сущность возможных форм осуществления изобретения. Конечно, полное изобретение может охватывать множество форм, которые могут быть подобными или отличными от форм осуществления изобретения, излагаемых ниже.
[0003] Описанная здесь технология предлагает различные жесты, такие как жесты, основанные на касании, которые могут использоваться для управления некоторыми устройствами NDT. Например, пользователь может поместить палец на часть сенсорного экрана, входящего в состав телевизионного бороскопа, и переместить палец на некоторое расстояние по сенсорному экрану. Перемещение может интерпретироваться процессором телевизионного бороскопа как управляющее действие для перемещения зонда бороскопа на необходимое расстояние. Необходимое расстояние может быть получено, например, на основании положения пальца относительно центра сенсорного экрана. Другие такие жесты описаны более подробно ниже.
[0004] В первой форме осуществления изобретения система неразрушающего контроля (NDT) содержит датчик, сконфигурированный для сбора данных об окружающей среде. Система NDT также содержит систему манипуляции, сконфигурированную для перемещения датчика, и сенсорный экран, сконфигурированный для отображения интерфейса пользователя и изображения окружающей среды на основании собранных данных, причем сенсорный экран сконфигурирован для приема множества жестов управления. Кроме того, система NDT содержит процессор, сконфигурированный для интерпретации каждого из множества жестов управления и для управления системой манипуляции для перемещения датчика на основании интерпретации множества жестов управления.
[0005] Во второй форме осуществления изобретения способ включает сбор, посредством системы неразрушающего контроля (NDT), данных об окружающей среде с использованием датчика; построение, посредством системы NDT, изображения окружающей среды на основании собранных данных, и отображение изображения на системе с сенсорным экраном. Способ также включает прием, посредством системы с сенсорным экраном, жеста управления в качестве ввода пользователя, интерпретацию жеста управления, и активацию, посредством системы NDT, системы манипуляции, связанной с датчиком. Система манипуляции может управляться так, чтобы управлять ориентацией датчика, управлять режимом работы датчика, или любой их комбинацией на основании интерпретации жеста управления.
[0006] В третьей форме осуществления изобретения машиночитаемый носитель содержит компьютерно-исполняемый код, имеющий команды. Команды сконфигурированы для приема данных, относящихся к окружающей среде, построения изображения окружающей среды на основании принятых данных, и отображения изображения на устройстве с сенсорным экраном. Команды также сконфигурированы для приема жеста управления посредством устройства с сенсорным экраном, и интерпретации жеста управления. Кроме того, команды сконфигурированы для управления системой манипуляции, связанной с устройством, для управления ориентацией датчика, сконфигурированного для сбора данных, для управления режимом работы датчика, или любой их комбинацией на основании интерпретации жеста управления.
Краткое описание чертежей
[0007] Эти и другие особенности, аспекты, и преимущества настоящего изобретения станут более понятны после прочтения нижеследующего подробного описания со ссылками на прилагаемые чертежи, на которых подобные условные обозначения представляют подобные части повсюду на чертежах.
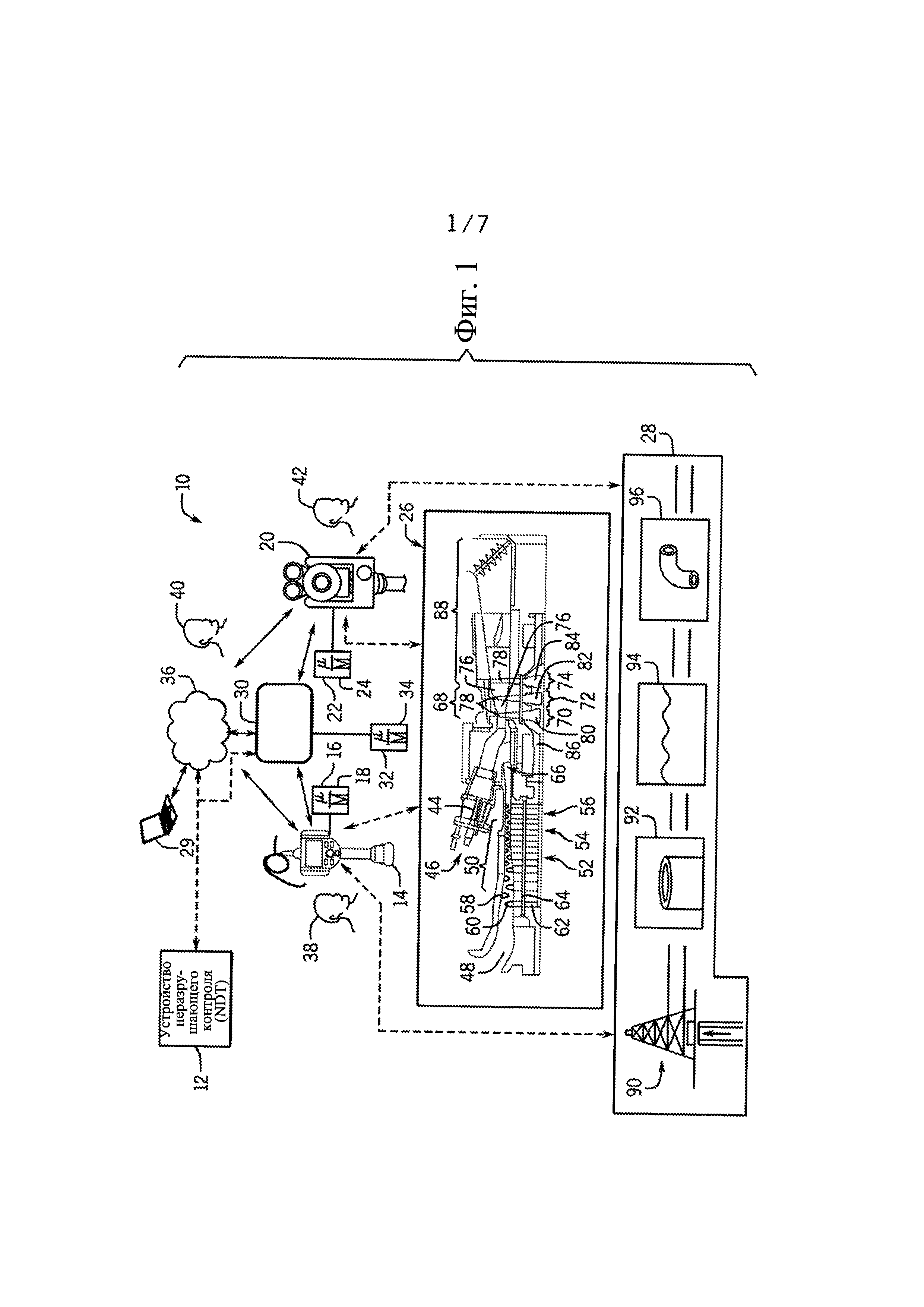
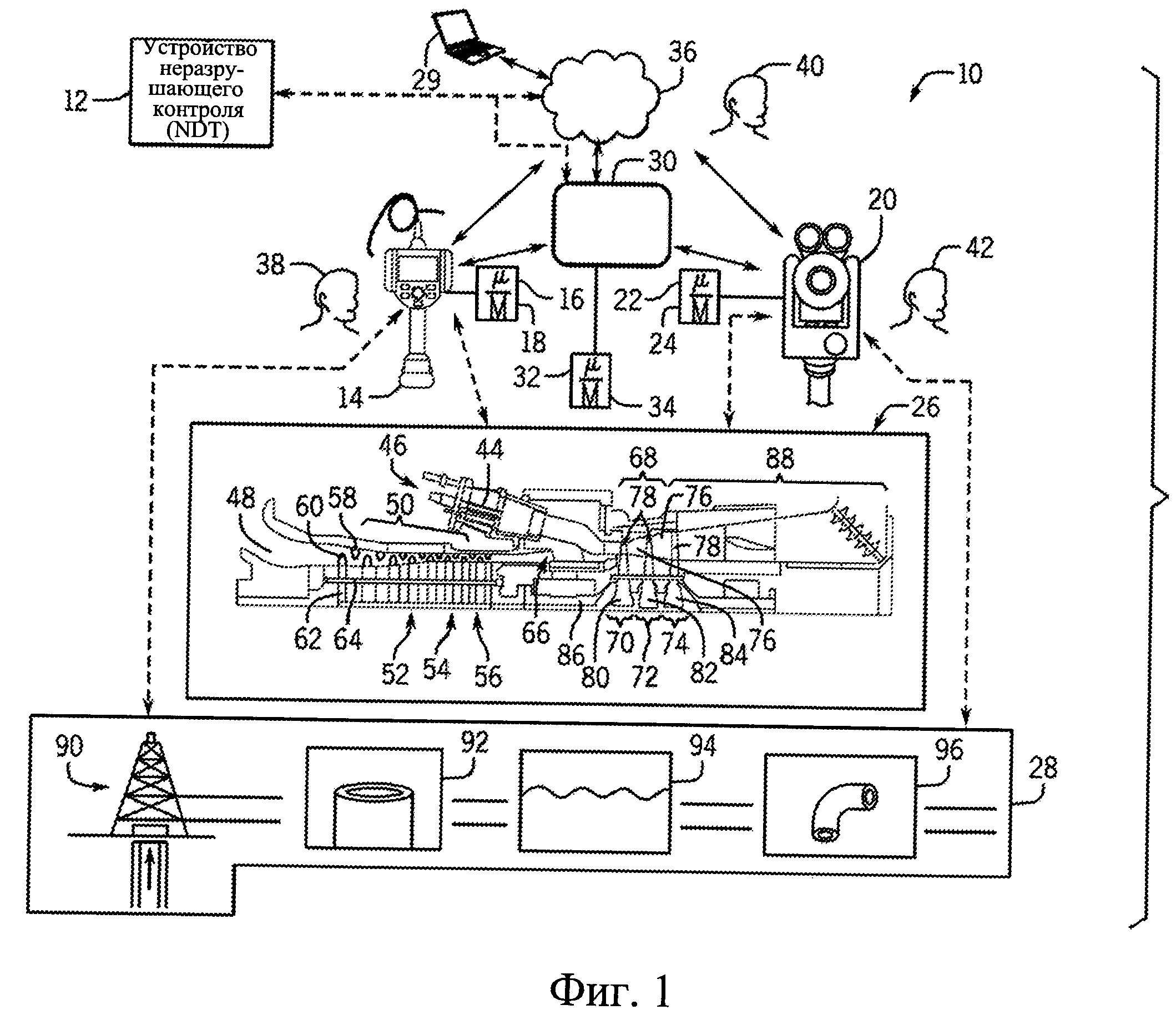
[0008] Фиг. 1 представляет собой блок-схему, иллюстрирующую пример формы осуществления распределенной системы NDT, содержащей устройства, сконфигурированные для управления с использованием относительных жестов управления, в соответствии с формой осуществления настоящей технологии.
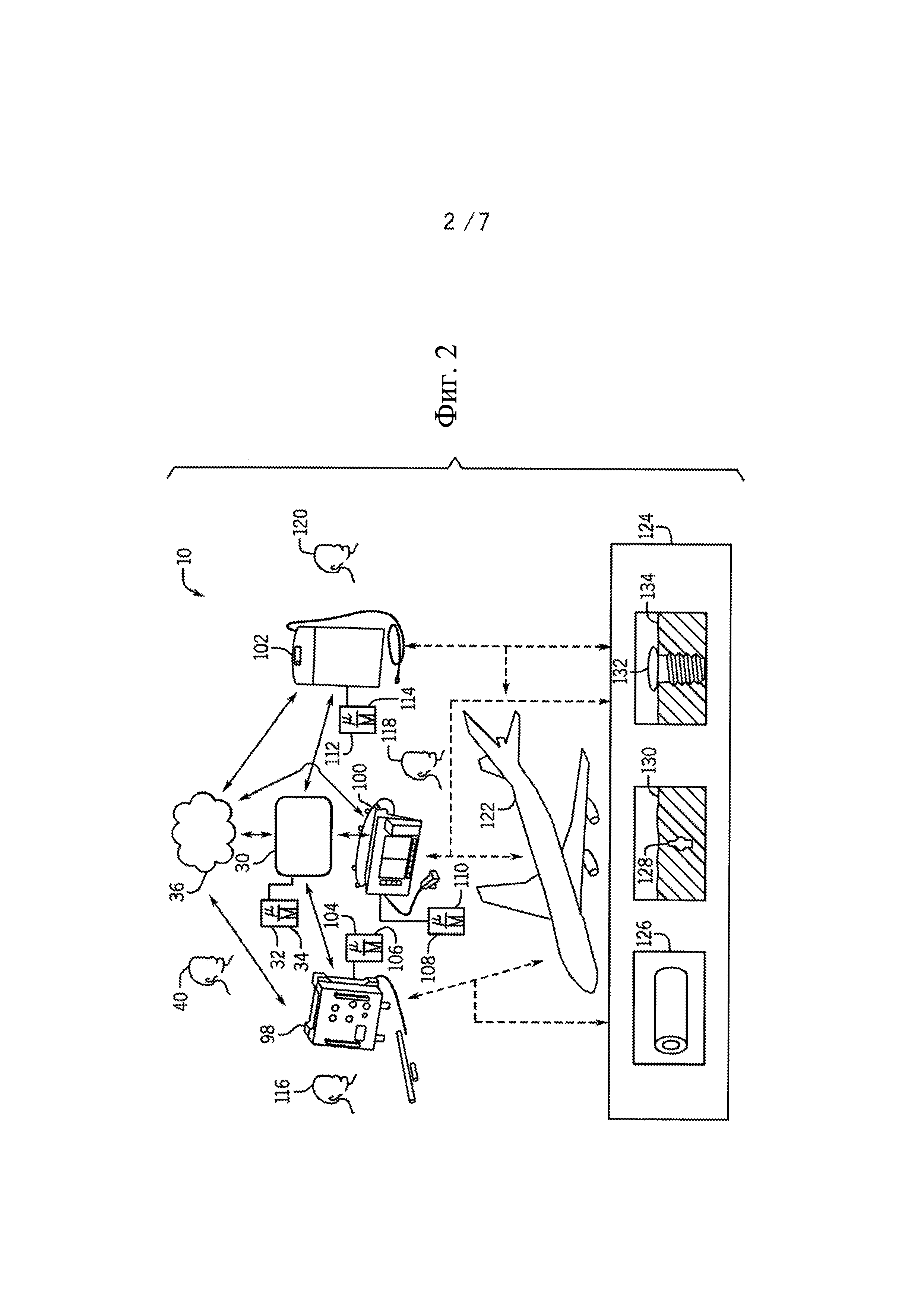
[0009] Фиг. 2 представляет собой блок-схему, иллюстрирующую дополнительные детали примера формы осуществления, показанного на фиг. 1, распределенной системы NDT, содержащей устройства, сконфигурированные для управления с использованием относительных жестов управления, в соответствии с формой осуществления настоящей технологии.
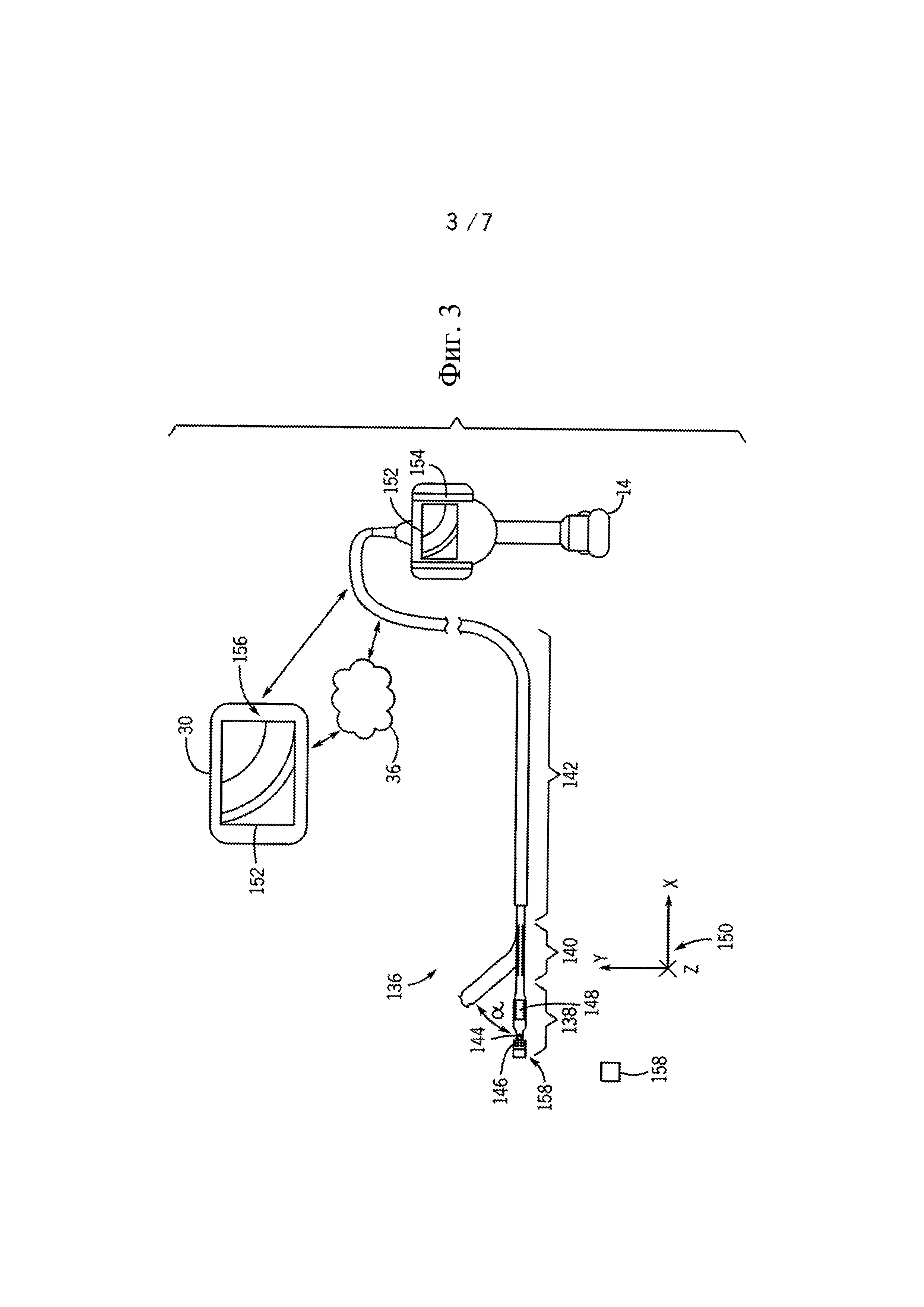
[0010] Фиг. 3 представляет собой вид спереди, иллюстрирующий пример формы осуществления бороскопа, соединенного с возможностью связи с мобильным устройством, показанным на фиг. 1, и "облачной" вычислительной средой, в соответствии с формой осуществления настоящей технологии.
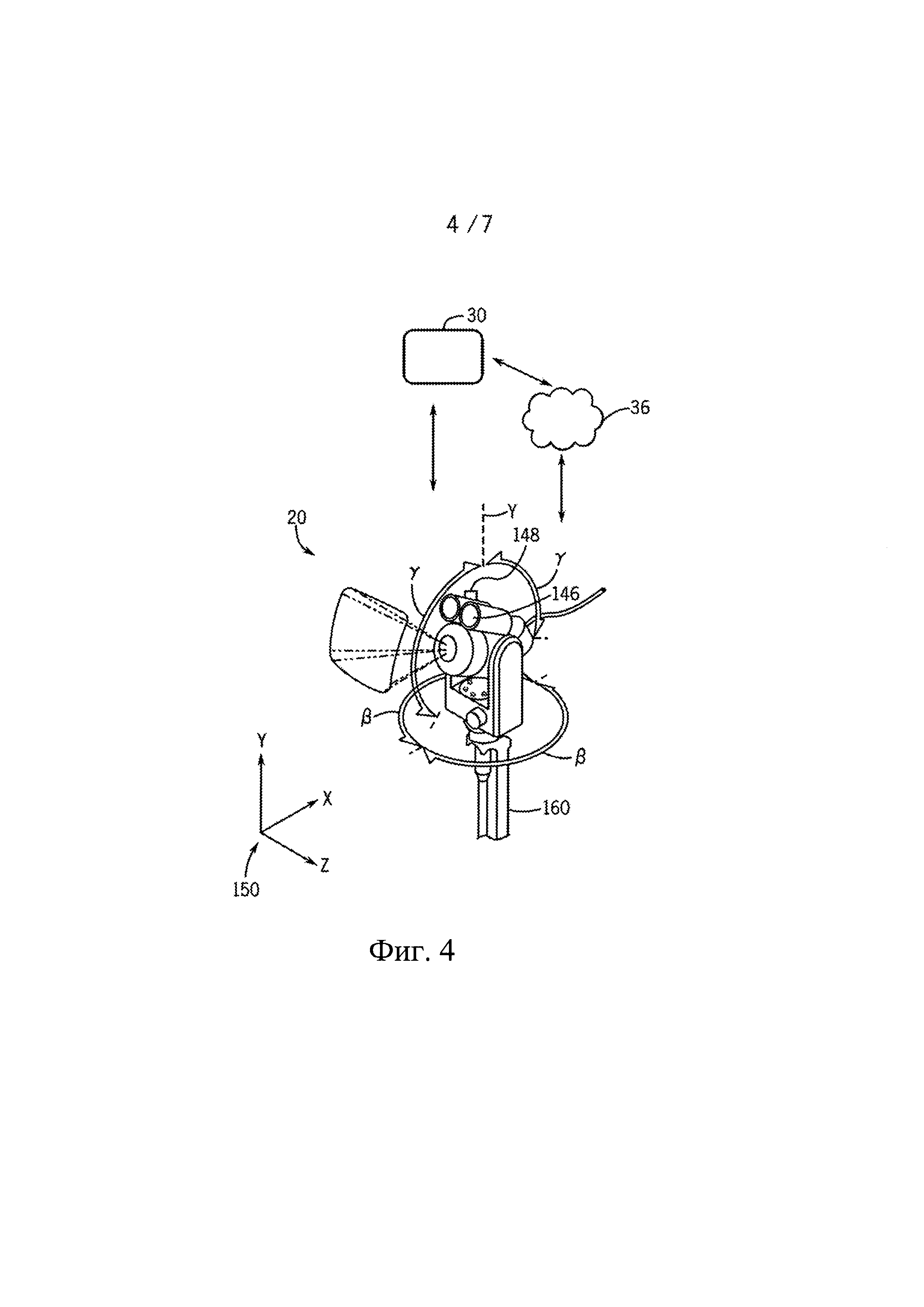
[0011] Фиг. 4 представляет собой иллюстрацию примера формы осуществления камеры с возможностью панорамирования-наклона-увеличения (Pan-Tilt-Zoom, PTZ), выполненной с возможностью связи с мобильным устройством, показанным на фиг. 1, в соответствии с формой осуществления настоящей технологии.
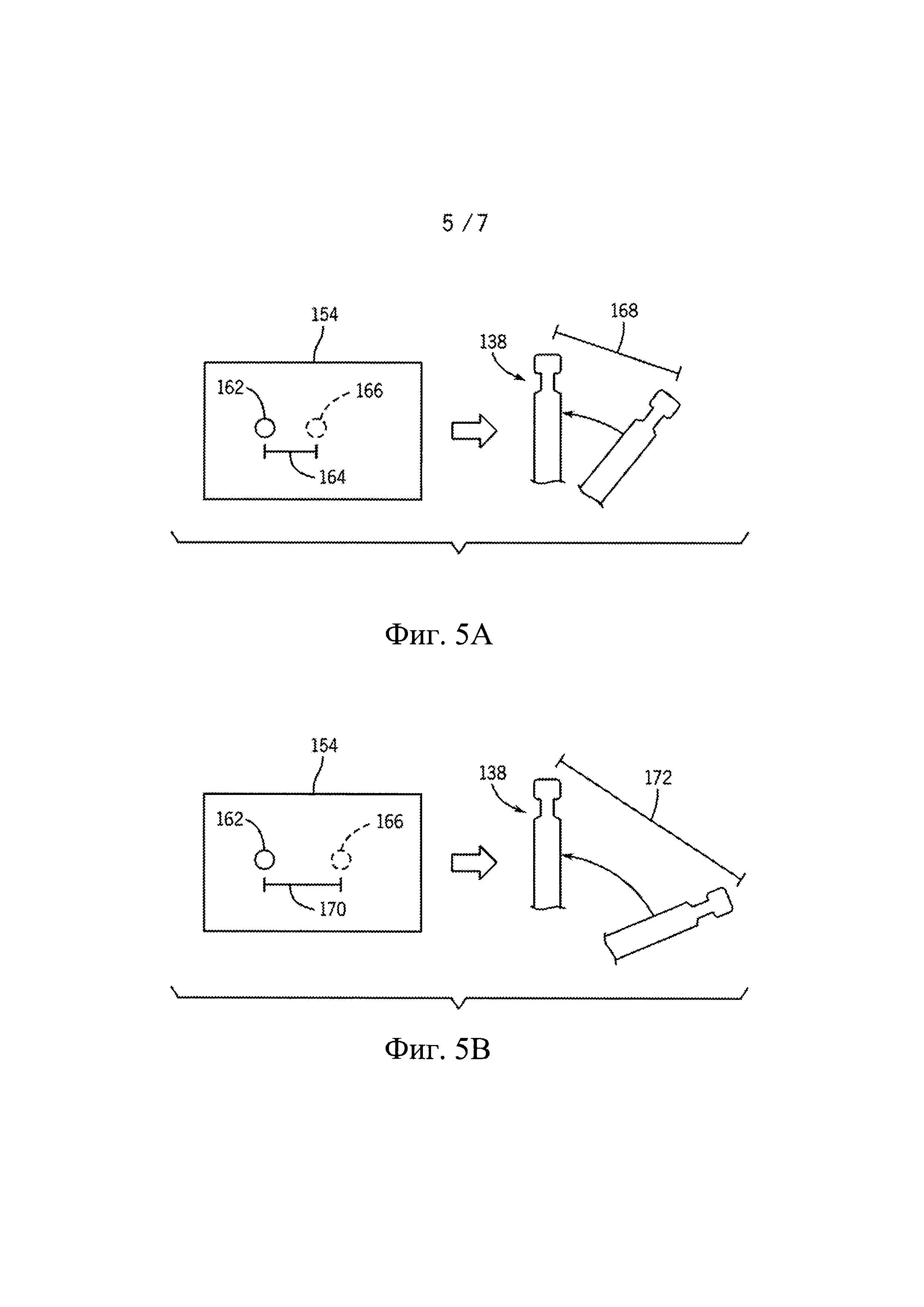
[0012] Фиг. 5А представляет собой иллюстрацию примера управления бороскопом, показанным на фиг. 3, с использованием относительного жеста управления в соответствии с формой осуществления настоящей технологии.
[0013] Фиг. 5В представляет собой иллюстрацию другого примера управления бороскопом, показанным на фиг. 3, с использованием относительного жеста управления в соответствии с формой осуществления настоящей технологии.
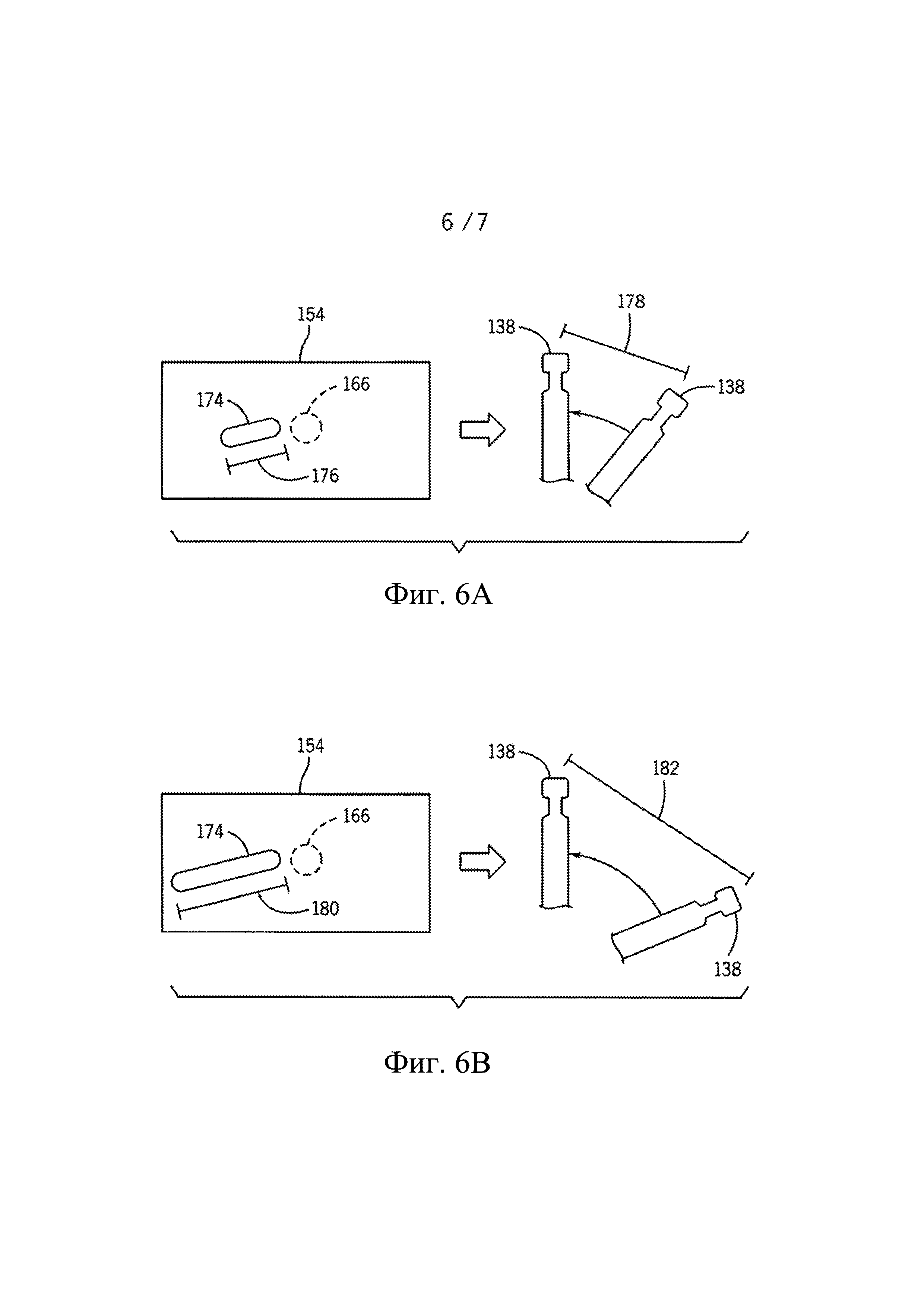
[0014] Фиг. 6А представляет собой иллюстрацию еще одного примера управления бороскопом, показанным на фиг. 3, с использованием относительного жеста управления в соответствии с формой осуществления настоящей технологии.
[0015] Фиг. 6В представляет собой иллюстрацию еще одного примера управления бороскопом, показанным на фиг. 3, с использованием относительного жеста управления в соответствии с формой осуществления настоящей технологии.
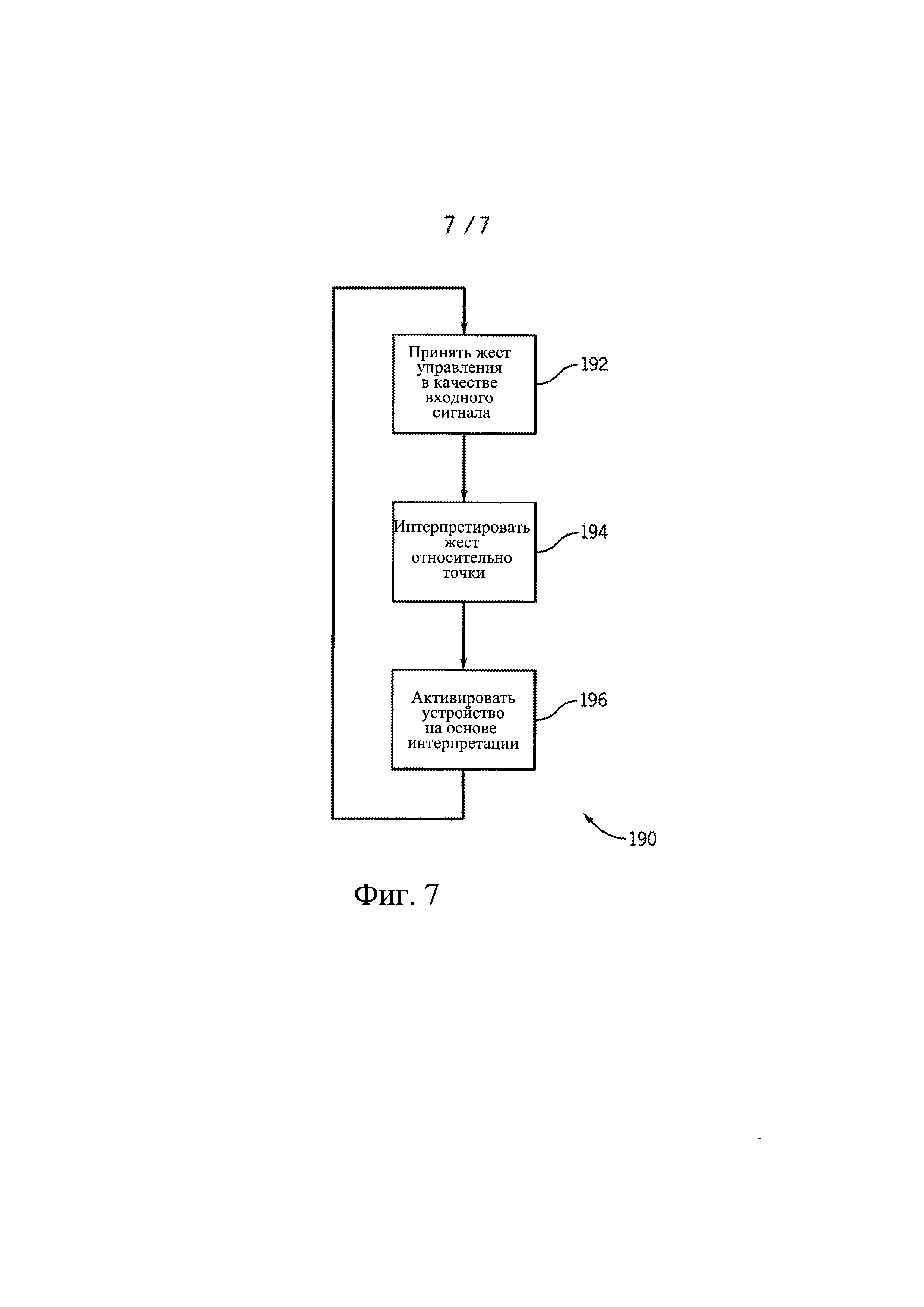
[0016] Фиг. 7 представляет собой блок-схему, иллюстрирующую пример процесса для использования относительных жестов управления, чтобы управлять бороскопом, показанным на фиг. 3, в соответствии с формой осуществления настоящей технологии.
Подробное описание
[0017] Формы осуществления изобретения, раскрытого здесь, относятся в целом к системам и устройствам неразрушающего контроля (NDT), которые могут использоваться для контроля различного оборудования и деталей (например, промышленного оборудования и деталей, энергетического оборудования и деталей, и авиационного оборудования и деталей). Системы и устройства NDT могут использоваться для того, чтобы контролировать оборудование и устройства путем сбора изображений и данных оборудования и деталей также и внутри оборудования и деталей. Соответственно, некоторые формы осуществления раскрываемого изобретения могут касаться схем управления для управления системами и устройствами NDT. В частности, некоторые формы осуществления раскрываемого изобретения могут использовать относительные жесты управления, которые могут позволить оператору управлять, например, устройством NDT на основе вида используемого жеста и близости жеста относительно точки на устройстве или изображении, отображенном на устройстве. В некоторых формах осуществления относительные жесты управления могут использоваться преимущественно на сенсорном экране, связанном с системой или устройством NDT, и могут использоваться для управления системой или устройством NDT в различных режимах работы. Другие формы осуществления изобретения находятся в пределах раскрытого изобретения.
[0018] Одна или несколько конкретных форм осуществления изобретения будут описаны ниже. В попытке представить краткое описание этих форм осуществления изобретения, все особенности действительной реализации не могут быть описаны в настоящем описании. Должно быть понятно, что при разработке любой такой действительной реализации, как в любом техническом или конструкторском проекте, многочисленные, определенные реализацией решения должны быть сделаны для достижения специфических целей разработчика, таких как согласование со связанными с системой и связанными с бизнесом ограничениями, которые могут изменяться от одной реализации к другой. Кроме того, должно быть понятно, что такие проектно-конструкторские работы могут быть сложными и трудоемкими, но, однако, будут повседневным занятием по конструированию, изготовлению и производству для специалистов средней квалификации, получающих выгоду от этого изобретения.
[0019] При представлении элементов различных форм осуществления изобретения, единственное и множественное число, а также слово "упомянутый" предназначены для того, чтобы подразумевать, что есть один или несколько элементов. Термины "содержащий", "включающий" и "имеющий" предназначены для того, чтобы быть включающими и подразумевающими, что кроме перечисленных могут быть другие дополнительные элементы.
[0020] Устройства и системы неразрушающего контроля (NDT) могут использоваться, чтобы контролировать различное оборудование и устройства, такие как оборудование и устройства выработки электроэнергии, нефтяное и газовое оборудование и устройства, авиационное оборудование и устройства, и производственное оборудование и устройства. Устройства и системы NDT обычно включают измерительные устройства (например, датчики) и камеры, которые могут вставляться в различные места в оборудовании и устройствах или вокруг них. Измерительные устройства и камеры дистанционно соединены с другими устройствами, которые оператор может использовать для визуализации данных, собираемых измерительным устройством и камерой, а также для управления измерительным устройством и камерой.
[0021] Как таковое, устройство или система NDT может содержать физический джойстик, виртуальный джойстик, панель управления или их комбинацию, которые позволяют оператору управлять или иначе позиционировать прикрепленный датчик (например, измерительное устройство и/или датчик камеры). Чтобы увеличить число управляющих действий, назначенных системе управления NDT, а также улучшить настройку управляющих действий под требования пользователя, устройство или система NDT может использовать набор относительных жестов управления (например, жестов прикосновения). В частности, относительные жесты управления могут преобразовываться в различные управляющие действия для управления ориентацией и перемещением устройства или системы NDT, а также для управления многочисленными режимами работы устройства или системы NDT. В некоторых формах осуществления относительные жесты управления могут использоваться для переключения между различными режимами работы.
[0022] Операторы также могут реконфигурировать относительные жесты управления различными путями. Например, операторы могут переназначать управляющие действия, назначенные некоторым относительным жестам управления. Операторы также могут реконфигурировать относительные жесты управления, чтобы использовать несколько пальцев и рук, и создавать приближение механизма "активных углов" (hot corners). Относительные жесты управления также могут использоваться для регулировки чувствительности, особенно, когда жесты управления используются для управления устройством или системой NDT посредством сенсорного экрана.
[0023] Некоторые примеры относительных жестов управления включают одиночное касание экрана NDT для толчковой подачи (броска) зонда для манипуляции в направлении касания относительно центра экрана. Нажатие и удержание могут давать команду системе NDT двигаться непрерывно в направлении нажатия и удержания. В то время как, продолжая удержание, пользователь может скользить своим пальцем к другому месту, давая секции манипуляции устройства NDT новую команду. Касание вторым пальцем в это время может переключать в режим блокировки ориентирования (Steer and Stay) как описано более подробно ниже. Касание двумя пальцами может быть дополнительно возможным в любое время, чтобы включать и выключать режим блокировки ориентирования. Двойное касание экрана одним пальцем может переключать функцию стоп-кадра. Конечно, может предусматриваться множество жестов, как описано здесь.
[0024] С учетом предыдущего, фиг. 1 изображает блок-схему формы осуществления распределенной системы NDT 10. В изображенной форме осуществления распределенная система NDT 10 может содержать одно или более устройств 12 неразрушающего контроля. Устройства 12 неразрушающего контроля могут быть разделены, по меньшей мере, на две категории. В одной категории, изображенной на фиг. 1, устройства 12 неразрушающего контроля могут включать устройства, подходящие для визуального контроля различного оборудования и окружающей среды. В другой категории, описанной ниже более подробно в отношении фиг. 2, устройства 12 неразрушающего контроля могут включать устройства, обеспечивающие альтернативы визуальным методам контроля, такие как рентгеновский контроль, контроль вихревых токов и/или ультразвуковой контроль.
[0025] В изображенном примере первой категории на фиг. 1 устройства 12 неразрушающего контроля могут включать бороскоп 14, имеющий один или более процессоров 16 и запоминающее устройство 18, а также транспортабельную камеру 20 с возможностью панорамирования-наклона-увеличения (PTZ), имеющую один или более процессоров 22 и запоминающее устройство 24. В этой первой категории устройств визуального контроля бороскоп 14 и камера PTZ 20 могут использоваться, чтобы контролировать, например, турбомашину 26 и устройства или участок 28. Как показано, бороскоп 14 и камера PTZ 20 могут быть выполнены с возможностью связи с мобильным устройством 30, также имеющим один или более процессоров 32 и запоминающее устройство 34. Мобильное устройство 30 может включать, например, планшетный компьютер, сотовый телефон (например, смартфон), портативный компьютер типа ноутбук, дорожный компьютер или любое другое мобильное вычислительное устройство. Соответственно, в одной форме осуществления изобретения мобильное устройство 30 может быть планшетным компьютером, упомянутым выше, поставляемым компанией Дженерал Электрик, Скенектади, Нью-Йорк, и обеспечивающим ввод данных посредством сенсорного экрана. Мобильное устройство 30 может быть выполнено с возможностью связи с контрольными устройствам 12 неразрушающего контроля, такими как бороскоп 14 и/или камера PTZ 20, посредством различных беспроводных или проводных систем связи. Например, беспроводные системы связи могут включать беспроводную сеть WiFi (Wireless Fidelity, "беспроводная точность") (например, на основе протоколов IEEE 802.11Х Института инженеров по электротехнике и радиоэлектронике (Institute of Electrical and Electronics Engineers, IEEE)), сотовые системы (например, по технологии высокоскоростной пакетной передачи данных (High Speed Packet Access, HSPA)), усовершенствованной технологии HSPA (HSPA+), технологии долгосрочной эволюции (Long Term Evolution, LTE), технологии глобальной совместимости для микроволнового доступа (World Interoperability for Microwave Access, WiMAX)), коммуникации ближней зоны (Near Field Communications, NFC)), Bluetooth ("Синий зуб"), персональные локальные сети (Personal Area Networks, PANS) и т.п.Беспроводные системы могут использовать различные протоколы связи, такие как протокол управления передачей/межсетевой протокол (Transmission Control Protocol/Internet Protocol, TCP/IP), протокол пользовательских датаграмм (User Datagram Protocol, UDP), протокол передачи с управлением потоками (Stream Control Transmission Protocol, SCTP), уровней сокетов и т.п. В некоторых формах осуществления беспроводные или проводные системы могут включать уровни безопасности, такие как уровни защиты сокетов (Secure Socket Layers, SSL), уровни виртуальной частной сети (Virtual Private Network, VPN), зашифрованные уровни, уровни аутентификации вызова ключа, уровни аутентификации по признакам и т.п. Проводные системы связи могут включать частную кабельную проводку, кабельную проводку с разъемами RJ45 (Registered Jack 45), коаксиальные кабели, волоконно-оптические кабели и т.п.
[0026] Дополнительно или альтернативно, мобильное устройство 30 может быть выполнено с возможностью связи с контрольным устройством 12 неразрушающего контроля, таким как бороскоп 14 и/или камера PTZ 20, посредством "облачной" вычислительной среды 36. Конечно, мобильное устройство 30 может использовать технологию "облачных" 36 вычислений и коммуникаций (например, сеть облачных вычислений) включающую, но не ограниченную этим, гипертекстовый транспортный протокол (Hyper Text Transmission Protocol, HTTP), протокол защищенной передачи гипертекстовой информации (Hyper Text Transfer Protocol Secure, HTTPS), протоколы TCP/IP, протоколы сервисно-ориентированной архитектуры (Service Oriented Architecture, SOA) (например, простой протокол доступа к объектам (Simple Object Access Protocol, SOAP)), языки описания веб-сервисов (Web Services Description Languages, WSDLs), чтобы связываться и взаимодействовать с устройствами 12 неразрушающего контроля из любого географического местоположения, включая географические местоположения, удаленные от физического места, которое собираются подвергнуть контролю. Кроме того, в некоторых формах осуществления изобретения мобильное устройство 30 может обеспечивать функциональные возможности "активной точки" (hot spot), в которой мобильное устройство 30 может предоставлять функциональные возможности зоны беспроводного доступа (Wireless Access Point, WAP), пригодные для подключения устройств 12 неразрушающего контроля к другим системам в облачной среде 36.
[0027] Бороскоп 14 и камера PTZ могут управляться разными операторами, расположенными на участке контроля и/или в удаленном месторасположении. Например, оператор 38 бороскопа может физически манипулировать бороскопом 14 в одном месте, в то время как оператор 40 мобильного устройства может использовать мобильное устройство 30, чтобы связываться и взаимодействовать с бороскопом 14 и физически манипулировать им во втором месте посредством методов дистанционного управления. Второе место может быть вблизи первого места или географически удалено от него. Аналогично, оператор 42 камеры может физически управлять камерой PTZ 20 в третьем месте и оператор 40 мобильного устройства может дистанционно управлять камерой PTZ 20 в четвертом месте, используя мобильное устройство 30. Четвертое место может быть вблизи третьего места или географически удалено от него. Любое и все управляющие действия, выполняемые операторами 38 и 42, могут дополнительно выполняться оператором 40 посредством мобильного устройства 30. Кроме того, оператор 40 может поддерживать связь с операторами 38 и/или 42 с использованием устройств 14, 20 и 30 посредством таких технологий как передача речи по протоколу Интернет (Voice Over IP, VOIP), обмен через виртуальную доску сообщений, текстовые сообщения и т.п.
[0028] В данных формах осуществления изобретения оператор 38 бороскопа и/или оператор 42 камеры PTZ могут управлять бороскопом 14 и/или камерой PTZ 20 посредством относительных жестов управления (например, жестов прикосновения), которые описаны более подробно ниже. Относительные жесты управления могут использоваться самостоятельно или могут объединяться с входными сигналами, полученными от других управляющих устройств (например, физического устройства манипуляции, такого как физический джойстик, набор кнопок, физическая панель управления и т.п.). Кроме того, относительные жесты управления могут объединяться с входными сигналами управления от других внешних систем, таких как вторая система NDT, портативный компьютер, сотовый телефон, планшетный компьютер и т.п.Далее, в тех формах осуществления изобретения, в которых мобильное устройство 30 используется главным образом для управления бороскопом 14 и/или камерой PTZ 20, оператор также может использовать относительные жесты управления посредством мобильного устройства 30. Конечно, мобильное устройство 30 может использоваться отдельно или в тандеме с устройствами 14 и 20 операторами 38, 40 и 42.
[0029] Управляемые операторами 38, 40 и/или 42 бороскоп 14 и/или камера PTZ 20 могут использоваться, чтобы визуально контролировать широкое множество оборудования и деталей. Например, бороскоп 14 может вставляться во множество отверстий для бороскопа и в другие места турбомашины 26, чтобы обеспечивать освещение и визуальный контроль множества компонентов турбомашины 26. В представленной форме осуществления изобретения турбомашина 26 показана как газовая турбина, подходящая для преобразования энергии углеродистого топлива в механическую энергию. Однако, могут контролироваться и другие виды оборудования, включая компрессоры, насосы, турбодетандеры, ветряные турбины, гидротурбины, промышленное оборудование и/или жилое оборудование. Турбомашина 26 (например, газовая турбина) может содержать множество компонентов, которые могут контролироваться описанными здесь устройствами 12 неразрушающего контроля.
[0030] С учетом вышеизложенного, может быть полезно обсудить некоторые компоненты турбомашины 26, которые могут контролироваться с использованием раскрытых здесь форм осуществления изобретения. Например, некоторые компоненты турбомашины 26, изображенной на фиг. 1, могут быть осмотрены на коррозию, эрозию, образование трещин, утечек, контроль сварных швов и т.п. Механические системы, такие как турбомашина 26, испытывают механические и тепловые напряжения из-за условий работы во время эксплуатации и могут требовать периодического осмотра некоторых компонентов. Во время работы турбомашины 26 топливо, такое как природный или синтетический газ, может направляться в турбомашину 26 через одну или более топливных форсунок 44 в камеру 46 сгорания. Воздух может входить в турбомашину 26 через секцию 48 воздухозаборника и может сжиматься компрессором 50. Компрессор 50 может содержать ряд ступеней 52, 54 и 56, которые сжимают воздух. Каждая ступень может содержать один или более наборов направляющих лопаток 58 и рабочих лопаток 60, которые вращаются, чтобы постепенно повышать давление и подавать сжатый воздух. Лопатки 60 могут быть присоединены к вращающимся колесам 62, соединенным с валом 64. Сжатый воздух, истекающий из компрессора 50, может выходить из компрессора 50 через диффузор 66 и может направляться в камеру 46 сгорания, чтобы смешиваться с топливом. Например, топливные форсунки 44 могут вводить горючую смесь в камеру 46 сгорания в соответствующей пропорции для оптимальных сгорания, выбросов, расхода горючего и отдаваемой мощности. В некоторых формах осуществления турбомашина 26 может содержать многочисленные камеры 46 сгорания, расположенные в виде кольца. Каждая камера 46 сгорания может направлять горячие газообразные продукты сгорания в турбину 68.
[0031] Как изображено, турбина 68 содержит три отдельные ступени 70, 72 и 74, окруженные кожухом 76. Каждая ступень 70, 72 и 74 содержит комплект лопаток или турбинных лопаток 78, присоединенных к соответствующим рабочим колесам 80, 82 и 84, которые присоединены к валу 86. Когда горячие газообразные продукты сгорания вызывают вращение турбинных лопаток 78, вал 86 вращается, чтобы приводить в действие компрессор 50 и любую другую соответствующую нагрузку, такую как электрический генератор. В конечном счете, турбомашина 26 рассеивает и выпускает газообразные продукты сгорания через выпускную секцию 88. Раскрываемые формы осуществления изобретения, такие как устройства 12 неразрушающего контроля, могут использоваться, чтобы контролировать и обслуживать компоненты турбины, такие как форсунки 44, воздухозаборник 48, компрессор 50, направляющие лопатки 58, рабочие лопатки 60, колеса 62, вал 64, диффузор 66, ступени 70, 72 и 74, лопатки 78, вал 86, кожух 76 и выпускная секция 88.
[0032] Дополнительно или альтернативно, камера PTZ 20 может располагаться в различных местах вокруг или внутри турбомашины 26 и может использоваться для обеспечения визуального наблюдения за этими местами. Камера PTZ 20 может дополнительно включать один или более осветителей, подходящих для освещения желаемых мест, и может дополнительно включать средства масштабирования, панорамирования и наклона, описанные более подробно ниже в отношении фиг. 4, полезные для производства наблюдения повсюду во множестве труднодоступных областей. Бороскоп 14 и/или камера 20 могут дополнительно использоваться, чтобы контролировать оборудование 28, такое как нефтяное и газовое оборудование 28. Различное оборудование, такое как нефтяное и газовое оборудование 90, может контролироваться визуально с использованием бороскопа 14 и/или камеры PTZ 20. В основном, места, такие как внутренности труб или трубопроводов 92, подводные (или под слоем топлива) места 94 и трудно наблюдаемые места, такие как места, имеющие кривизну или изгибы 96, могут визуально контролироваться с использованием мобильного устройства 30 и бороскопа 14 и/или камеры PTZ 20. Соответственно, оператор 40 мобильного устройства может более безопасно и эффективно контролировать оборудование 26, 90 и места 92, 94 и 96, и совместно использовать результаты наблюдения в реальном времени или почти реальном времени посредством мест, географически удаленных от контролируемых областей. Должно быть понятно, что другие устройства 12 неразрушающего контроля могут использовать описанные здесь формы осуществления, такие как волоконные бороскопы (например, манипулируемый волоконный бороскоп, не манипулируемый волоконный бороскоп), и телеуправляемые транспортные средства (Remotely Operated Vehicle, ROVs), включая роботов контроля трубопроводов и роботов на гусеничном ходу.
[0033] Обратимся теперь к фиг. 2, которая представляет блок-схему формы осуществления распределенной системы NDT 10, изображающей вторую категорию устройств 12 неразрушающего контроля, которые могут быть способны обеспечивать данные альтернативного контроля для данных визуального контроля. Например, вторая категория устройств 12 неразрушающего контроля может включать устройство 98 контроля вихревых токов, устройство ультразвукового контроля, такое как ультразвуковой дефектоскоп 100, и устройство рентгеновского контроля, такое как устройство 102 цифровой радиографии. Устройство 98 контроля вихревых токов может содержать один или более процессоров 104 и запоминающее устройство 106. Аналогично, ультразвуковой дефектоскоп 100 может содержать один или более процессоров 108 и запоминающее устройство 110. Точно так же устройство 102 цифровой радиографии может содержать один или более процессоров 112 и запоминающее устройство 114. Во время работы устройство 98 контроля вихревых токов может управляться его оператором 116, ультразвуковой дефектоскоп 100 может управляться его оператором 118, и устройство 102 цифровой радиографии может управляться оператором 120 радиографии.
[0034] Как изображено, устройство 98 контроля вихревых токов, ультразвуковой дефектоскоп 100 и устройство 102 цифровой радиографии, может быть выполнено с возможностью связи с мобильным устройством 30, используя проводные или беспроводные средства связи, включая средства связи, упомянутые выше в отношении фиг. 1. Дополнительно или альтернативно, устройства 98, 100 и 102 могут связываться с мобильным устройством 30 с использованием облачной среды 36. Например, устройство 98 контроля вихревых токов может быть связано с сотовой зоной доступа и использовать ее для соединения с одним или более экспертами по контролю и анализу вихревых токов. Соответственно, оператор 40 мобильного устройства может дистанционно управлять различными аспектами работы устройств 98, 100 и 102, используя мобильное устройство 30, и может сотрудничать с операторами 116, 118 и 120 посредством голоса (например, посредством передачи речи по протоколу IP (VOIP)), совместного использования данных (например, путем обмена через виртуальную доску сообщений), предоставления аналитики данных, поддержки эксперта и т.п.
[0035] Соответственно, имеется возможность улучшить визуальное наблюдение различного оборудования, такого как система 122 и детали 124 воздушного судна, рентгеновским наблюдением, ультразвуковым наблюдением и/или наблюдением вихревых токов. Например, внутренность и стенки труб 126 могут контролироваться на коррозию и/или эрозию. Аналогично, засорения или нежелательные наросты в трубах 126 могут обнаруживаться с использованием устройств 98, 100 и/или 102. Точно так же могут наблюдаться трещины или пустоты 128, расположенные в черном или цветном металле 130. Кроме того, могут проверяться расположение и жизнеспособность деталей 132, вставленных в компонент 134. Конечно, используя описанную здесь технологию, можно обеспечить улучшенный контроль оборудования и компонентов 122, 126, 130 и 134. Например, мобильное устройство 30 может использоваться, чтобы связываться и взаимодействовать с устройствами 14, 20, 98, 100 и 102 и обеспечивать дистанционное управление ими.
[0036] Устройства 98, 100 и 102 также могут эксплуатироваться с использованием мобильного устройства 30 подобно бороскопу 14 и/или камере PTZ 20. В частности, все устройства 14, 20, 98, 100 и 102 могут управляться с использованием относительных жестов управления, которые описаны более подробно ниже. Аналогично устройствам 14 и 20, мобильное устройство 30 может быть расположено рядом или использоваться в тандеме с устройствами 98, 100 и 102.
[0037] На фиг. 3 показан вид спереди бороскопа 14, связанного с мобильным устройством 30 и облачной средой 36. Соответственно, бороскоп 14 может снабжать данными любое число устройств, подключенных к облачной среде 36, или внутри облачной среды 36. Как упомянуто выше, мобильное устройство 30 может использоваться для приема данных от бороскопа 14, и для дистанционного управления бороскопом 14 или их комбинацией. Например, множество данных может передаваться от бороскопа 14 на мобильное устройство 30, включая, но не ограничиваясь этим, изображения, видео и результаты измерения датчиков, такие как температура, давление, расход, зазор (например, измеряемый между неподвижным и вращающимся компонентами), и результаты измерения расстояния. Аналогично, мобильное устройство 30 может передавать команды управления (например, относительные жесты управления), команды перепрограммирования, команды конфигурации и т.п. на бороскоп 14.
[0038] Как изображено, бороскоп 14 содержит вставляемую трубку 136, пригодную для вставления в различные места, такие как в турбомашине 26, оборудовании 90, трубах или трубопроводах 92, подводные места 94, кривые участки или изгибы 96, внутри или снаружи системы 122 воздушного судна, внутренность трубы 126 и т.п. Вставляемая трубка 136 может включать головную секцию 138, секцию 140 манипуляции и секцию 142 кабелепровода. В изображенной форме осуществления головная секция 138 может содержать камеру 144, один или более осветителей 146 (например, светодиодов) и одно или более измерительных устройств 148. Обычно головная секция 138 может содержать один или более датчиков, которые собирают данные об окружающей среде (например, камеру 144, измерительное устройство 148 и т.п.). Как упомянуто выше, камера бороскопа 144 может получать изображения и видео, подходящие для контроля. Осветители 146 могут использоваться для обеспечения освещения, когда головная секция 138 располагается в местах, имеющих низкую освещенность или не имеющих никакого освещения.
[0039] Во время использования секция 140 манипуляции может управляться, например, мобильным устройством 30 и/или управляющими входными сигналами (например, относительными жестами управления) от бороскопа 14. В частности, набор относительных жестов управления может использоваться для управления секцией 140 манипуляции. Секция 140 манипуляции может ориентироваться или "сгибаться" в различных измерениях и может использовать пневматическое управление (то есть, один или более пневмоцилиндров), механические двигатели и тросы, или их комбинацию, чтобы управлять ориентацией головной секции 138. Например, секция 140 манипуляции может перемещать головную секцию 138 в плоскости X-Y, плоскости X-Z и/или плоскости Y-Z изображенных координатных осей XYZ 150. Конечно, относительные жесты управления могут использоваться для выполнения управляющих действий, подходящих для расположения головной секции 138 под различными углами, такими как изображенный угол а. Таким образом, головная секция 138 может позиционироваться так, чтобы визуально контролировать желаемые места. Камера 144 тогда может получать, например, видеоизображение 152, которое может отображаться на экране 154 бороскопа 14 и экране 156 мобильного устройства 30, и может записываться бороскопом 14 и/или мобильным устройством 30. В изображенных формах осуществления изобретения экраны 154 и 156 могут быть сенсорными экранами с функцией мультитач ("множественное касание"), использующими емкостную технологию, резистивную технологию, технологию инфракрасной сетки и т.п., чтобы обнаруживать прикосновение стилуса и/или одного или более пальцев человека. Дополнительно или альтернативно, изображения и видеоизображения 152 могут передаваться в облачную среду 36.
[0040] Другие данные, включающие, но, не ограничиваясь ими, данные датчика 148, могут дополнительно передаваться и/или записываться бороскопом 14. Данные датчика 148 могут включать температурные данные, данные расстояния, данные зазора (например, расстояние между вращающимся и неподвижным компонентами), данными расхода и т.п. В некоторых формах осуществления бороскоп 14 может содержать множество сменных наконечников 158. Например, сменные наконечники 158 могут включать наконечники для поиска и извлечения посторонних предметов, такие как петли, магнитные наконечники, захватывающие наконечники и т.п. Сменные наконечники 158 могут дополнительно включать сменные инструменты для очистки и извлечения засорений, такие как проволочные щетки, кусачки и т.п. Сменные наконечники 158 могут дополнительно включать наконечники, имеющие разные оптические характеристики, такие как фокусное расстояние, наконечники для стереоскопического режима, наконечники для 3-мерных фазовых измерений, теневых измерений и т.п. Дополнительно или альтернативно, головная секция 138 может представлять собой съемную и заменяемую головную секцию 138. Соответственно, множество головных секций 138 может быть предусмотрено с различными диаметрами, и вставляемая трубка 136 может располагаться в ряде мест, имеющих отверстия приблизительно от одного миллиметра до десяти миллиметров или более. Конечно, может осматриваться широкое множество оборудования и деталей, и данные могут совместно использоваться посредством мобильного устройства 30 и/или облачной среды 36.
[0041] Фиг. 4 представляет перспективное изображение формы осуществления мобильной камеры PTZ 20, выполненной с возможностью связи с мобильным устройством 30 и облачной средой 36. Как упомянуто выше, оператор 42 может дистанционно манипулировать камерой PTZ 20, чтобы помещать камеру PTZ 20 для рассмотрения желаемого оборудования и мест. В изображенном примере камера PTZ 20 может наклоняться и поворачиваться вокруг оси Y. Например, камера PTZ 20 может поворачиваться вокруг оси Y под углом В приблизительно в пределах от 0 до 180°, от 0 до 270°, от 0 до 360° или более. Аналогично, камера PTZ 20 может наклоняться, например, относительно плоскости Y-X под углом у приблизительно от 0 до 100°, от 0 до 120°, от 0 до 150° или более относительно оси Y. Осветители 146 могут управляться аналогично, например, для включения или выключения и увеличения или уменьшения уровня освещенности (например, в люксах) до необходимого значения. Датчики 148, подходящие для измерения расстояния до определенных объектов, такие как лазерный дальномер, также могут быть установлены на камеру PTZ 20. Могут использоваться и другие датчики 148, включая температурные датчики для удаленного контроля (например, инфракрасные датчики температуры), датчики давления, датчики расхода, датчики зазора и т.п.
[0042] Камера PTZ 20 может транспортироваться к желаемому месту, например, с использованием стержня 160. Стержень 160 дает возможность оператору 42 перемещать камеру и помещать камеру, например, в места 92, 126, под воду 94, в опасные (например, с опасными материалами) места и т.п.Дополнительно, стержень 160 может использоваться для постоянного закрепления камеры PTZ 20 посредством установки стержня 160 на постоянную или полупостоянную опору. Таким образом, камера PTZ 20 может транспортироваться и/или закрепляться в необходимом месте. Камера PTZ 20 тогда может передавать, например, используя технологии проводной и/или беспроводной связи, данные изображений, видео, данные датчика 140 и т.п., на мобильное устройство 30 и/или в облачную среду 36. Соответственно, данные, принимаемые от камеры PTZ 16, могут удаленно анализироваться и использоваться для определения состояния и пригодности к эксплуатации необходимого оборудования и деталей.
[0043] Одни устройства 12 неразрушающего контроля могут иметь физический джойстик, физический пульт управления и/или другое физическое устройство манипуляции, чтобы управлять перемещением секции манипуляции или головной секции устройства. Другие устройства 12 неразрушающего контроля могут использовать виртуальный джойстик, виртуальную панель управления и/или другое виртуальное устройство манипуляции, отображаемое на экране, связанном с устройством 12, таком как экран 154 бороскопа 14 или экран 156 мобильного устройства 30. Однако может быть ограниченное число управляющих действий, которые могут быть назначены различным манипуляциям пульта управления или джойстика. Например, физический джойстик может позволять только пять манипуляций (например, передвижение джойстика вверх, вниз, влево и вправо, и нажатие на кнопки, расположенные на джойстике), и, соответственно только пять управляющих действий могут быть назначены для физического джойстика. Также может быть ограниченное количество настроек под требования пользователя, которые оператор (например, оператор 38 бороскопа, оператор 40 мобильного устройства, оператор 42 камеры и т.д.) может выполнять относительно переназначения управляющих действий, связанных с различными движениями.
[0044] Чтобы увеличить число управляющих действий, которые могут быть назначены системе управления, и количество настроек согласно требованиям пользователя для этих назначений, устройство 12 неразрушающего контроля может использовать относительные жесты управления, как отмечено выше. То есть, определенные управляющие действия, такие как перемещение секции манипуляции и/или головной секции устройства 12 неразрушающего контроля, могут быть назначены определенным жестам управления. В частности, относительные жесты управления могут отображать перемещение головной секции 138 бороскопа 14 в изображенных формах осуществления. Соответственно, относительные жесты управления могут использоваться вместо физического или виртуального джойстика, или панели управления либо совместно с ними.
[0045] Относительные жесты управления могут использоваться для управления различными режимами работы устройства 12 неразрушающего контроля, такими как основной режим изменения ориентации, блокировка ориентирования (режим Steer and Stay) и возврат в исходное положение. Режим блокировки ориентирования может вызывать функцию стоп-кадра ("замораживания" изображения) для головной секции 138, и описан более подробно ниже. Возврат в исходное положение обычно относится к приведению головной секции 138 обратно в исходное или нейтральное положение. В некоторых формах осуществления относительные жесты управления также могут использоваться для переключения между режимами работы устройства 12 неразрушающего контроля. Как будет понятно из приведенных ниже примеров, относительные жесты управления обычно представляют собой жесты, интерпретация которых определяется частично относительно особенного места на устройстве с сенсорным экраном. В одной форме осуществления изобретения интерпретация относительных жестов основана на близости и направлении жеста относительно центра экрана. В других формах осуществления изобретения углы экрана, конфигурируемые пользователем определенные зоны экрана и т.п., могут использоваться альтернативно или в дополнение к центру экрана. Например, в некоторых формах осуществления изобретения относительные жесты могут интерпретироваться относительно центра изображения, представляющего данные, собранные головной секцией 138 и отображенные на экране 154. Соответственно, относительные жесты управления могут использоваться для регулировки чувствительности, когда интерпретация относительного жеста управления основана на близости жеста относительно центра экрана, центра изображения и/или других зон экрана.
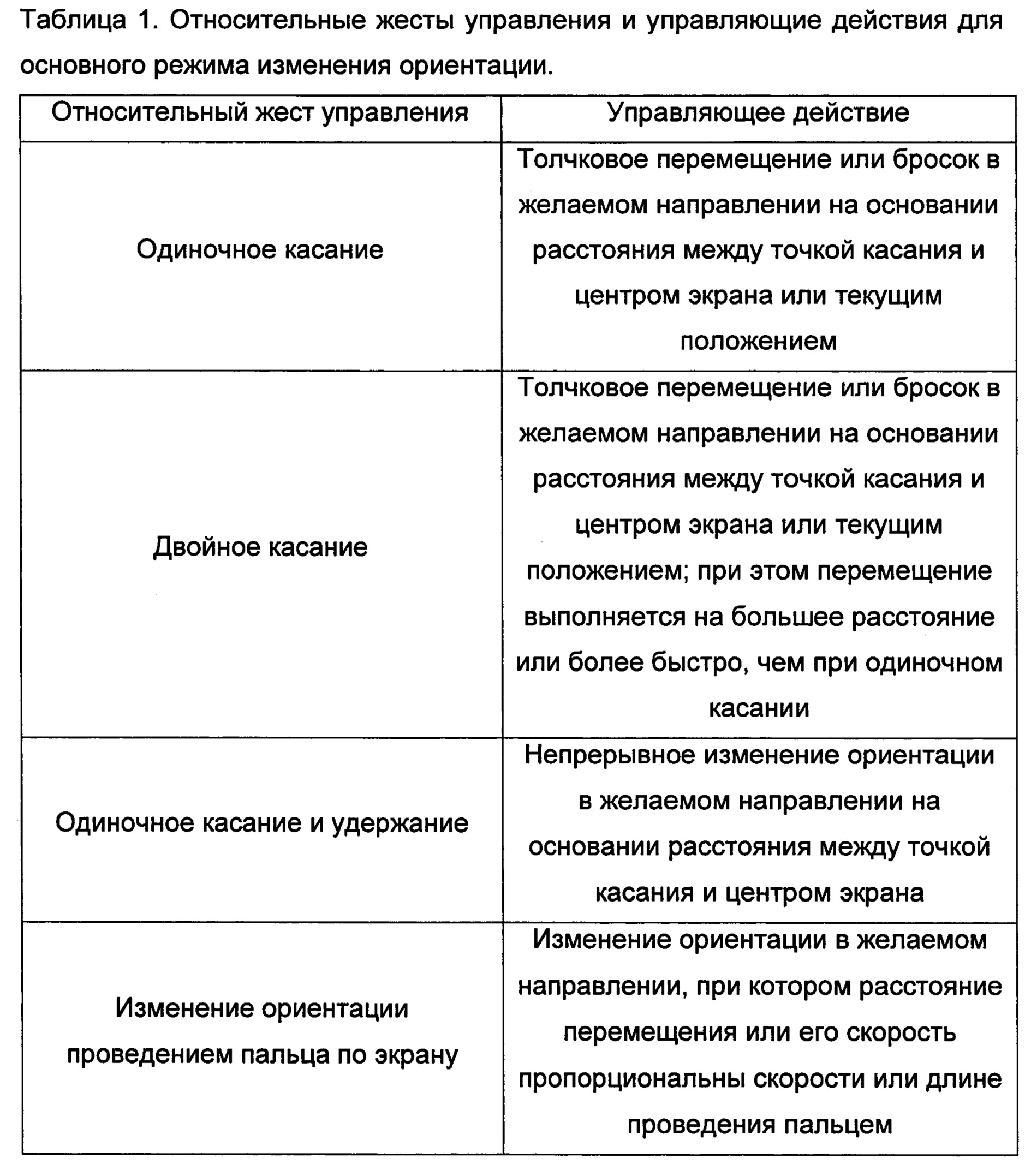
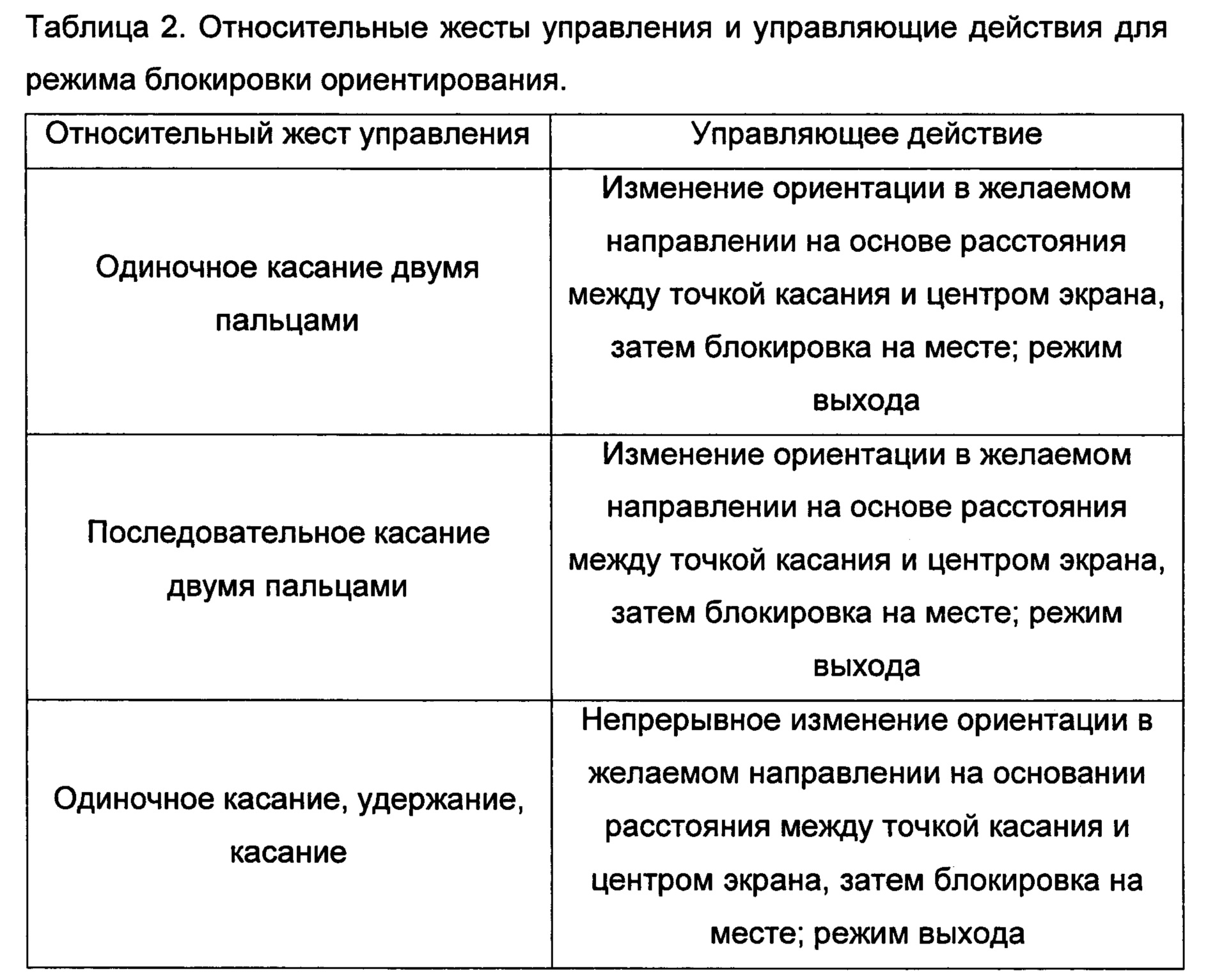
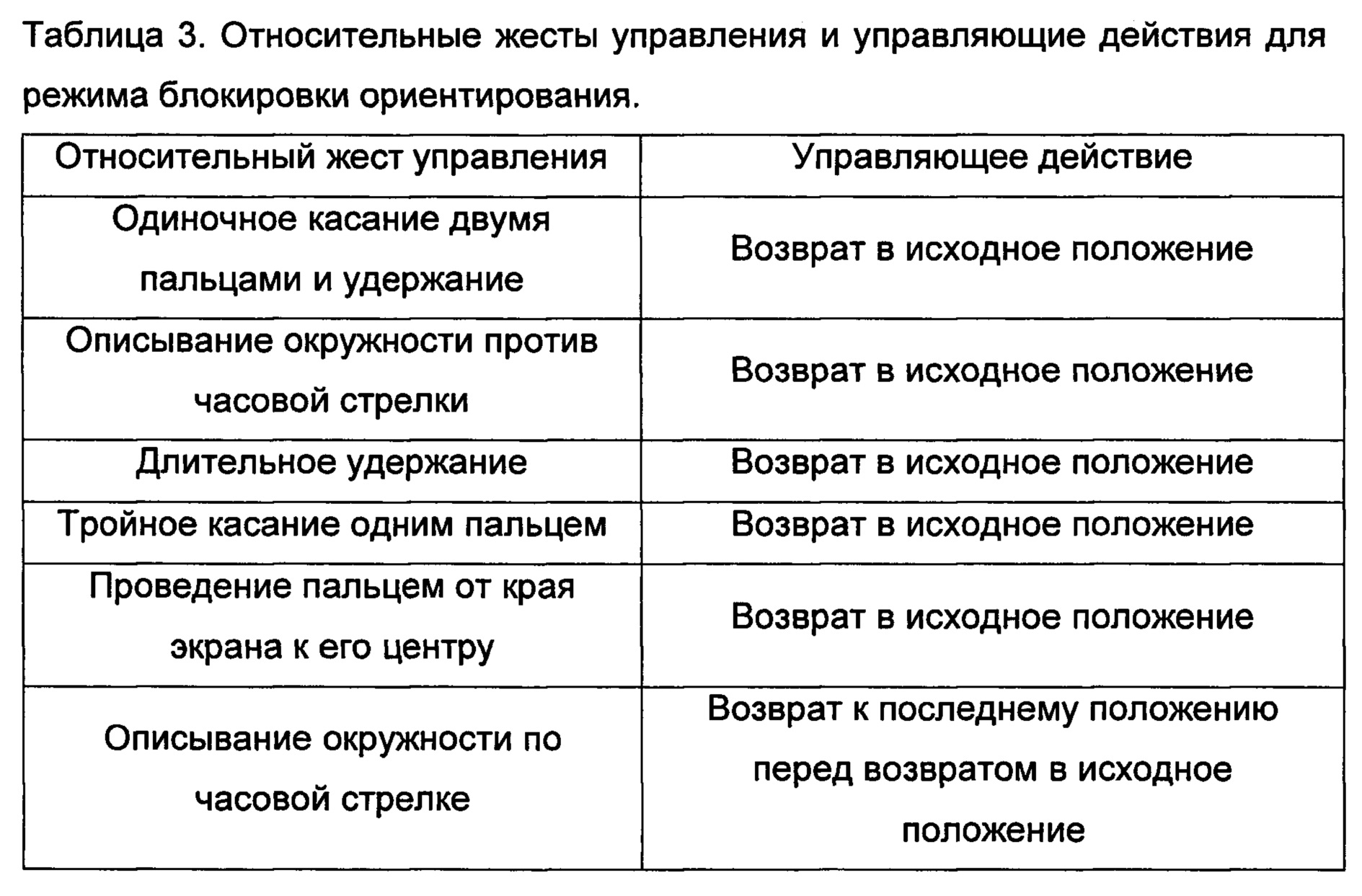
[0046] В табл. 1-3 ниже детализируются списки приводимых в качестве примера относительных жестов управления и назначенных им управляющих действий для каждого из этих трех режимов работы. Как будет понятно, списки в табл. 1-3 не предназначены быть исчерпывающим перечнем управляющих действий относительных жестов управления и режимов работы устройства 12 неразрушающего контроля. Далее, хотя относительные жесты управления и управляющие действия описаны ниже в отношении бороскопа 14, они могут использоваться для любого из устройств 12 неразрушающего контроля (например, камеры PTZ 20, устройства 98 контроля вихревых токов, ультразвукового дефектоскопа 100 и устройства 102 цифровой радиографии). Кроме того, хотя относительные жесты управления описаны ниже как выполняемые на сенсорном экране (например, экране 154 и/или экране 156), должно быть понятно, что в других формах осуществления изобретения относительные жесты управления могут фиксироваться посредством периферийной камеры (например, телевизионной камеры), присоединенной к бороскопу 14. Тогда в таких формах осуществления изобретения относительные жесты управления могут интерпретироваться относительно точки во входном окне камеры, то есть относительно точки в области, захватываемой камерой.
[0047] В табл. 1 приведены в качестве примера относительные жесты управления и соответствующее им управляющее действие для основного режима изменения ориентации головной секции. Жест одиночного касания может использоваться для изменения ориентации головной секции 138 и/или секции 140 манипуляции бороскопа 14 в желаемом направлении, основанном на местоположении точки касания относительно центра экрана 154 бороскопа 14. Величина расстояния между начальным положением и конечным положением головной секции 138 может определяться на основании расстояния между точкой касания и центром экрана 154. Например, как показано на фиг. 5А, одиночное касание 162, расположенное на расстоянии 164 от центра 166 экрана 154, может заставить головную секцию 138 переместиться на расстояние 168. В отличие от этого, на фиг. 5В расстояние 170 вдвое больше расстояния 164 на фиг. 5А. Соответственно, расстояние 172 на фиг. 5В может быть вдвое больше того, которое показано на фиг. 5А (хотя возможны другие изменения масштаба).

[0048] Следует отметить, что, хотя табл.1-2 относятся к центру экрана в качестве исходного положения, другие, устанавливаемые под требования пользователя, положения могут включать углы экрана, а также настраиваемое под требования пользователя исходное положение, которое может быть где угодно на экране. Жест двойного касания, подобно жесту одиночного касания, может изменять ориентацию головной секции 138 и/или секции 140 манипуляции в желаемом направлении на основе местоположения двойного касания относительно центра экрана 154 и расстояния между точкой двойного касания и центром экрана 154. В некоторых формах осуществления изобретения бороскоп 14 может быть сконфигурирован так, чтобы головная секция 138 покрывала большее расстояние, когда применяется двойное касание, чем, если бы в том же самом месте было сделано одиночное касание. Например, когда применяется двойное касание, головная секция 138 может перемещаться на расстояние, вдвое большее расстояния, которое было бы в результате одиночного касания, сделанного в том же самом месте. Соответственно, жест двойного касания может использоваться для существенных изменений ориентации головной секции 138 (например, для поворота на 180°). В других формах осуществления изобретения жест двойного касания может уменьшать фактическое время, затрачиваемое на изменение ориентации головной секции 138 и/или секции 140 манипуляции. То есть в таких формах осуществления изобретения головная секция 138 может покрывать то же самое расстояние на основании местоположения жеста относительно центра экрана 154 независимо от того, используется ли жест одиночного касания или двойного касания. Однако бороскоп 14 может быть сконфигурирован так, чтобы применение жеста двойного касания направляло головную секцию 138 и/или секцию 140 манипуляции к желаемому месту с более высокой скоростью, например, вдвое быстрее, чем при жесте одиночного касания.
[0049] Жест одиночного касания и удержания может непрерывно изменять ориентацию головной секции 138 и/или секции 140 манипуляции в желаемом направлении на основании местоположения точки касания относительно центра экрана 154. Жест проведения пальцем, изменяющий ориентацию, может изменять ориентацию головной секции 138 и/или секции 140 манипуляции в желаемом направлении на основании направления проведения пальцем. Расстояние, покрываемое головной секцией 138, может быть пропорционально длине или скорости проведения пальцем. Например, фиг. 6А изображает форму осуществления изобретения, в которой расстояние 178, покрываемое головной секцией 138, является пропорциональным длине 176 проведения пальцем 174 по экрану 154 бороскопа 14. Как показано, длина 180 на фиг. 6В равна удвоенной длине 176 на фиг. 6А, и в этом случае расстояние 182 на фиг. 6В равно удвоенному расстоянию 178 на фиг. 6А. В других формах осуществления изобретения жест проведения пальцем, изменяющий ориентацию, может воздействовать как на расстояние, покрываемое головной секцией 138, так и на скорость изменения ориентации. Например, расстояние, покрываемое головной секцией 138, может быть пропорционально длине проведения пальцем, в то время как скорость перемещения головной секции 138 и/или секции 140 манипуляции может быть пропорциональна скорости проведения пальцем. Наконец, в формах осуществления устройств 12 неразрушающего контроля, которые содержат камеру, таких как бороскоп 14, жест проведения двумя пальцами может изменять ориентацию головной секции 138 и/или секции 140 манипуляции в желаемом направлении при сборе во время перемещения изображений, чтобы создавать панорамное изображение или частичное панорамное изображение (например, изображение, имеющее угол обзора между 90-180°, 10-270°, 0,5-360°).
[0050] В табл. 2 приведены в качестве примера относительные жесты управления и соответствующие управляющие действия, когда бороскоп 14 находится в режиме блокировки ориентирования. Вход в режим блокировки ориентирования может включать функцию стоп-кадра для головной секции 138. То есть, как только головная секция 138 находится в желаемом положении, ни головная секция 138, ни секция 140 манипуляции не могут изменять свои положения до выхода из режима блокировки ориентирования, фактически фиксируя головную секцию 138 на месте. Как показано ниже, одиночное касание двумя пальцами, последовательное касание двумя пальцами, а также одиночное касание и жесты касания и удержания могут работать аналогично способу, которым они действуют в основном режиме изменения ориентации, и могут включать функцию стоп-кадра, как только управляющее действие заканчивается. Повторение любого из жестов тогда может заставить бороскоп 14 выйти из режима блокировки ориентирования.
[0051] Наконец, в табл. 3 приведены в качестве примера относительные жесты управления и соответствующие управляющие действия для режима возврата в исходное положение. Как упомянуто выше, возврат в исходное положение относится к управлению головной секцией 138 и/или секцией 140 манипуляции так, что головная секция 138 перемещается в исходное положение или позицию по умолчанию. Соответственно, большинство относительных жестов управления, перечисленных ниже (то есть, одиночное касание двумя пальцами и удержание, описывание окружности против часовой стрелки, длительное удержание, тройное касание одним пальцем и проведение пальцем от края экрана к центру экрана), приводят к возвращению головной секции 138 в исходное положение. Далее, в некоторых формах осуществления изобретения относительный жест управления, такой как описывание окружности по часовой стрелке, может приводить к возврату головной секции 138 к ее предыдущему положению перед возвратом в исходное положение.
[0052] Как указано выше, относительные жесты управления и соответствующие управляющие действия, перечисленные в табл. 1-3, не предназначены быть исчерпывающими, и при этом они не предназначены быть ограниченными бороскопом 14. Конечно, оператор (например, оператор 38 бороскопа, оператор 40 мобильного устройства, или оператор 42 камеры) может переназначать относительные жесты управления к другим управляющим действиям или наоборот, и также может добавлять дополнительные относительные жесты управления и управляющие действия. Например, оператор может назначить управляющие действия для тех относительных жестов управления, которые используют механизм "активных углов", в котором жест имеет место, прежде всего в пределах одного угла экрана. В других формах осуществления изобретения оператор может назначать управляющие действия для тех относительных жестов управления, которые используют несколько пальцев, как показано выше, или даже несколько рук.
[0053] Фиг. 7 изображает приводимый в качестве примера процесс 190 использования относительных жестов управления, чтобы управлять головной секцией 138 бороскопа 14 или любого другого подходящего устройства 12 неразрушающего контроля. Хотя процесс 190 описан подробно ниже, он может включать и другие шаги, не показанные на фиг. 7. Кроме того, показанные шаги могут быть опущены, выполняться одновременно и/или в другом порядке. Процесс 190 может быть реализован как машинные команды или рабочая программа, хранящаяся в запоминающем устройстве 18 и выполняемая процессором 16 бороскопа 14, как описано выше.
[0054] Начиная процесс в блоке 192, бороскоп 14 может принять относительный жест управления в качестве ввода пользователя. Как отмечено выше, относительные жесты управления могут приниматься как входной сигнал сенсорного экрана через экран 154 бороскопа 14 и/или экран 156 мобильного устройства 30. Тогда в блоке 194 бороскоп 14 может интерпретировать относительный жест управления исходя из его близости относительно особенной точки на экране 154 и/или 156, изображении, отображаемом на экране 154 и/или 156, или других местах на экране 154 и/или 156. Например, как отмечено выше, относительные жесты управления могут включать жесты, которые интерпретируются относительно центра экрана 154, а также как механизмы "активных углов", которые имеют место преимущественно в пределах одного угла экрана 154. Наконец, в блоке 196 бороскоп 14 тогда изменяет ориентацию головной секции 138 и/или секции 140 манипуляции, чтобы переместить головную секцию 138 в желаемое положение на основании интерпретация относительного жеста управления. Альтернативно или дополнительно, бороскоп 14 может изменять свой режим работы на основании интерпретации относительного жеста управления в блоке 196, как отмечено выше.
[0055] Технические эффекты изобретения включают управление устройством неразрушающего контроля (NDT), используемым для контроля оборудования и деталей. В частности, раскрытые формы осуществления изобретения включают использование набора относительных жестов управления для управления конкретным устройством NDT. Относительные жесты управления могут быть назначены различным управляющим действиям, чтобы изменять ориентацию и/или перемещать устройство NDT. В некоторых формах осуществления изобретения относительные жесты управления также могут использоваться для управления режимом работы устройства NDT. Относительные жесты управления и назначаемые им управляющие действия могут настраиваться оператором под его требования. Относительные жесты управления также могут использоваться для регулировки чувствительности. Наконец, относительные жесты управления могут использоваться для управления устройством NDT вместо физической системы управления или совместно с ней. Следует отметить, что приведенные в описании формы осуществления изобретения могут иметь другие технические эффекты и могут решать другие технические проблемы.
[0056] В той мере, в которой пункты формулы изобретения содержат выражение "по меньшей мере один из" при ссылке на множество элементов, оно предназначено означать по меньшей мере один или более из перечисленных элементов, и не ограничено по меньшей мере одним из каждого элемента. Например, "по меньшей мере один из элемента А, элемента В и элемента С", предназначено указывать только один элемент А или только один элемент В, или только один элемент С, или их комбинацию. "По меньшей мере один из элемента А, элемент В и элемент С" не предназначено быть ограниченным по меньшей мере одним из элемента А, по меньшей мере одним из элемента В, и по меньшей мере одним из элемента С.
[0057] В приведенном описании для раскрытия форм осуществления изобретения использованы примеры, в том числе наилучший вариант осуществления, которые также дают возможность специалисту в данной области применить на практике формы осуществления изобретения, включая создание и использование различных устройств или систем и осуществление содержащихся в изобретении способов. Рамки изобретения определяются в соответствии с формулой изобретения, и могут включать другие примеры, которые могут быть предложены специалистами. Такие другие примеры находятся в пределах объема формулы изобретения, если они имеют элементы конструкции, которые не отличаются от точного языка формулы изобретения, или если они включают эквивалентные элементы конструкции с несущественными отличиями от точного языка формулы изобретения.
Интеграция по теплу в процессе, включающем газификацию угля и реакцию метанирования
Способ и устройство для обеспечения правильной установки статоров в корпусе компрессора
Поглотители сероводорода и способы удаления сероводорода из асфальта
Селективное введение радиоактивной метки в биомолекулы
Магнитно-резонансные способы определения категории опухоли с использованием среды для визуализации, содержащей гиперполяризованный c-пируват
Обладающая синергическим действием добавка для процесса экстракции, состоящая из смеси кислот, и способ ее применения
Рабочая лопатка паровой турбины для части низкого давления паротурбинного двигателя
Устройство для запуска паровой турбины под номинальным давлением
Топливные форсунки газовой турбины с противоположными направлениями завихрения
Способ и установка для ввода текучей среды в камеру сгорания газотурбинного двигателя

