Результат интеллектуальной деятельности: Гидроакустическое навигационное устройство с четырехэлементной короткобазной приемной антенной
Вид РИД
Изобретение
Предлагаемое изобретение относится к области гидроакустических навигационных устройств, и может быть использовано для определения трехмерных координат автономного подводного аппарата (АПА) с целью автоматического приведения АПА к стыковочному модулю его носителя (СМ) при помощи гидроакустической навигационной системы с короткой базой.
Известно устройство для измерения расстояния до контролируемого подводного объекта, описанное в патенте №2313802 RU МПК G01S 15/08, содержащее гидроакустическую приемную антенну (ГПА) из двух независимых приемных элементов, разнесенных на расстояние, меньшее длины волны излучаемого сигнала. ГПА размещена непосредственно на грунте. Один элемент ГПА используется в составе векторного приемника колебательной скорости, а второй - в составе ненаправленного приемника звукового давления. По измеренным параметрам, с учетом предварительно измеренных плотности и скорости звука в придонном слое воды, а также плотности и скорости продольных волн в грунте определяют расстояние от ГПА до АПА.
Однако, указанное устройство не измеряет пеленг (угловую координату АПА относительно приемных антенн). АПА может находиться в любой точке окружности, центром которой является ГПА; радиус этой окружности равен измеренному расстоянию от ГПА до АПА.
Кроме того, известно устройство для измерения пеленга на автономные и привязные необитаемые подводные аппараты или другие подводные технические средства, описанное в патенте №2179730 RU МПК G01S 3/808, G01S 15/06, являющееся прототипом предлагаемого изобретения, содержащее ГПА с круговой базой, с эквидистантно размещенными на ней N приемными элементами, N-канальный измеритель фазы, N-канальный измеритель амплитуды, вычислитель, N-канальный измеритель отношения сигнал-шум, блок фазирования и вычислитель пеленга.
Однако, указанное устройство не измеряет наклонное расстояние между АПА и ГПА и требует использования достаточно большого количества элементов ГПА (в патенте приведены примеры с 7 и 15 элементами).
Задачей (техническим результатом) предлагаемого изобретения является обеспечение возможности определения наклонного расстояния между АПА и ГПА, возможность установки и работы элементов ГПА не только на дне, но и в толще воды, и уменьшение количества элементов ГПА до четырех.
Поставленная задача достигается тем, что в известном устройстве элементы приемной антенны располагают в горизонтальной плоскости по углам квадрата со стороной В, равной длине базы гидроакустической приемной антенны, а в вертикальной плоскости элементы по первой диагонали квадрата притопляют в толще воды или на дне, а элементы по второй диагонали квадрата размещают в толще воды выше элементов по первой диагонали квадрата на величину 0.4В…0.6В.
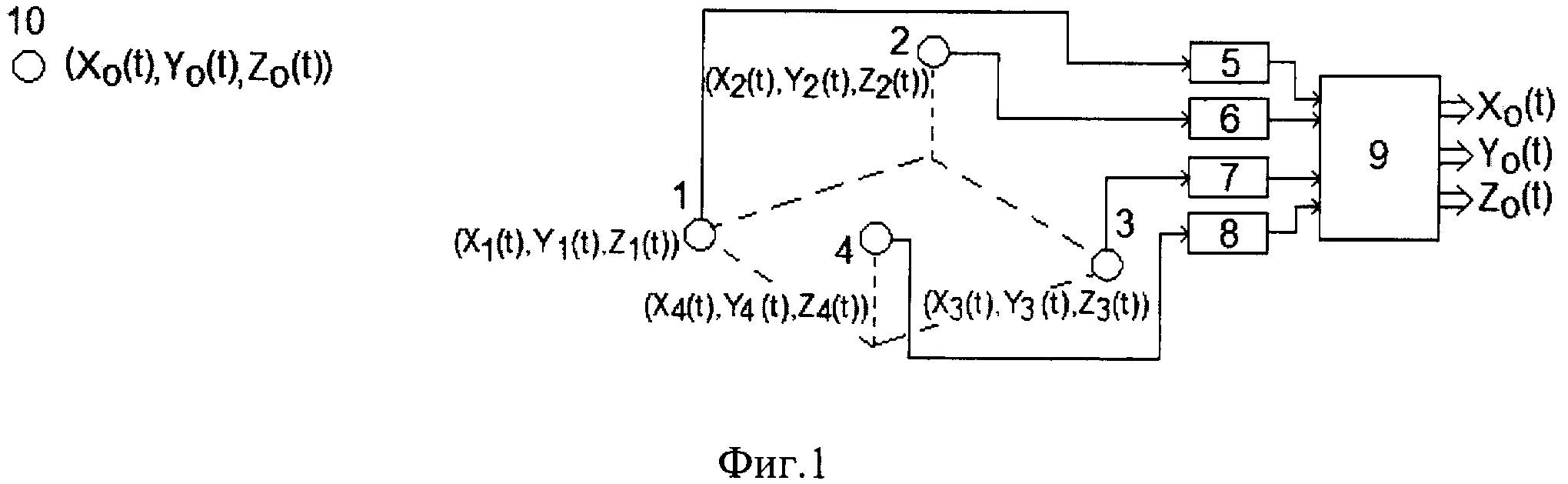
На Фиг. 1 приведена структурная схема предлагаемого устройства, на Фиг. 2 - схема расположения элементов приемной антенны.
На Фиг. 2 показано взаимное расположение элементов ГПА 1, 2, 3, 4 в горизонтальной и вертикальной (вид С) плоскостях. В - база короткобазной ГПА.
На Фиг. 1 в горизонтальной плоскости элементы ГПА 1, 2, 3, 4 размещаются по углам квадрата со стороной, равной длине базы В ГПА. В вертикальной плоскости элементы 1, 3 размещаются на уровне дна, либо в толще воды путем подтопления элементов, а элементы 2, 4 располагаются выше относительно элементов 1, 3 на величину 0.4В...0.6В. В случае, если данная величина будет менее 0.4В или более 0.6В, возможно существенное увеличение погрешности измерения координат передающей антенны 10. Координаты элементов 1, 2, 3, 4 известны, и в момент времени t равны (X1(t), Y1(t), Z1(t)), (X2(t), Y2(t), Z2(t)), (X3(t), Y3(t), Z3(t)), и (X4(t), Y4(t), Z4(t)) соответственно.
Элементы ГПА 1, 2, 3, 4 подключены к приемным каналам 5, 6, 7, 8 соответственно. Приемные каналы подключаются к измерительно-вычислительному блоку 9, измеряющему и вычисляющему в момент времени t координаты X0(t), Y0(t), Z0(t) АПА 10.
Устройство работает следующим образом: в момент времени t гидроакустический сигнал от передающей антенны 10 принимается элементами ГПА 1, 2, 3, 4 и через каналы 5, 6, 7, 8 соответственно, поступает в измерительно-вычислительный блок 9. Блок 9 измеряет τ10(t), τ20(t), τ30(t), τ40(t) - времена распространения сигнала от антенны 10 к элементам ГПА 1, 2, 3, 4. Измеренные времена используются для вычисления трехмерных координат X0(t), Y0(t). Z0(t) передающей антенны 10 по формулам:



где величины b1(t), b2(t), b3(t), h1(t), h2(t), h3(t), h4(t), h5(t), h6(t), h7(t), h8(t), h9(t), γ(t) определяются по формулам:
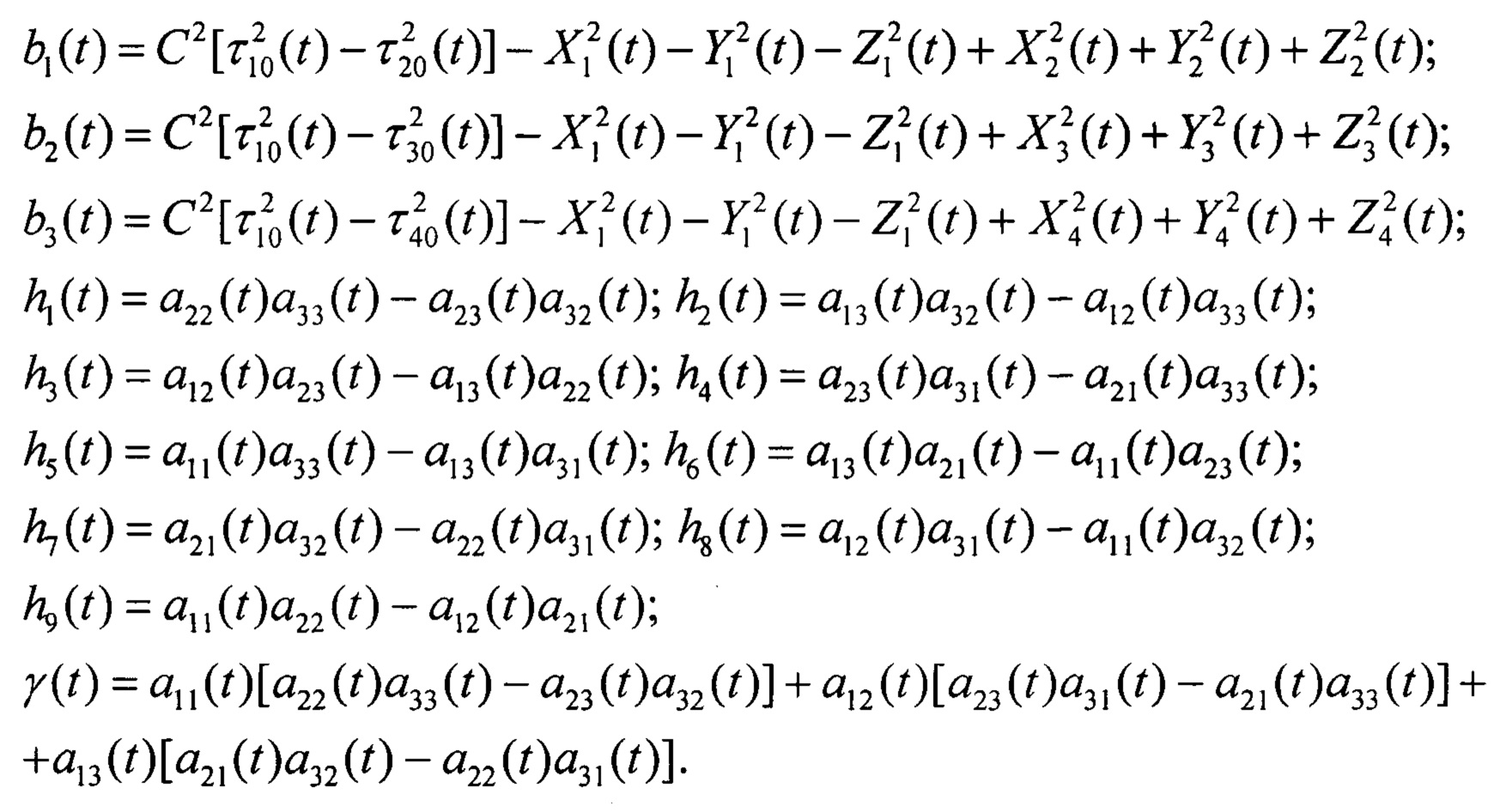
В этих формулах величины a11(t), a12(t), a13(t), a21(t), a22(t), a23(t), a31(t), a32(t), a33(t) определяются выражениями:

а величина С есть средневзвешенная по глубине скорость распространения звука в зоне расположения элементов антенн 1, 2, 3, 4 и передающей антенны 10.
Использование вышеописанной ГПА позволяет в реализации гидроакустической навигационной системы с базой элементов ГПА В=2 м, при условии измерения средневзвешенной по глубине скорости звука в зоне приведения с погрешностью не более 0,5%, а времени распространения навигационного сигнала с погрешностью не более 10 мкс, обеспечить требуемую точность измерения координат АПА: среднюю по зоне приведения абсолютную среднеквадратическую погрешность оценки угловых координат АПА не более 1 градуса, среднюю по зоне приведения относительную среднеквадратическую погрешность оценки наклонного расстояния до АПА не более 2%.
Гидроакустическое навигационное устройство с четырехэлементной короткобазной приемной антенной, содержащее одноэлементную гидроакустическую передающую антенну, расположенную на автономном подводном аппарате, а также гидроакустическую приемную антенну, имеющую известные координаты и содержащую четыре независимых приемных элемента, подключенных к приемным каналам, подключенным к измерительно-вычислительному блоку, отличающееся тем, что элементы приемной антенны расположены в горизонтальной плоскости по углам квадрата со стороной В, равной длине базы гидроакустической приемной антенны, а в вертикальной плоскости элементы по первой диагонали квадрата притоплены в толще воды или на дне, а элементы по второй диагонали квадрата размещаются в толще воды выше элементов по первой диагонали квадрата на величину 0.4В…0.6В.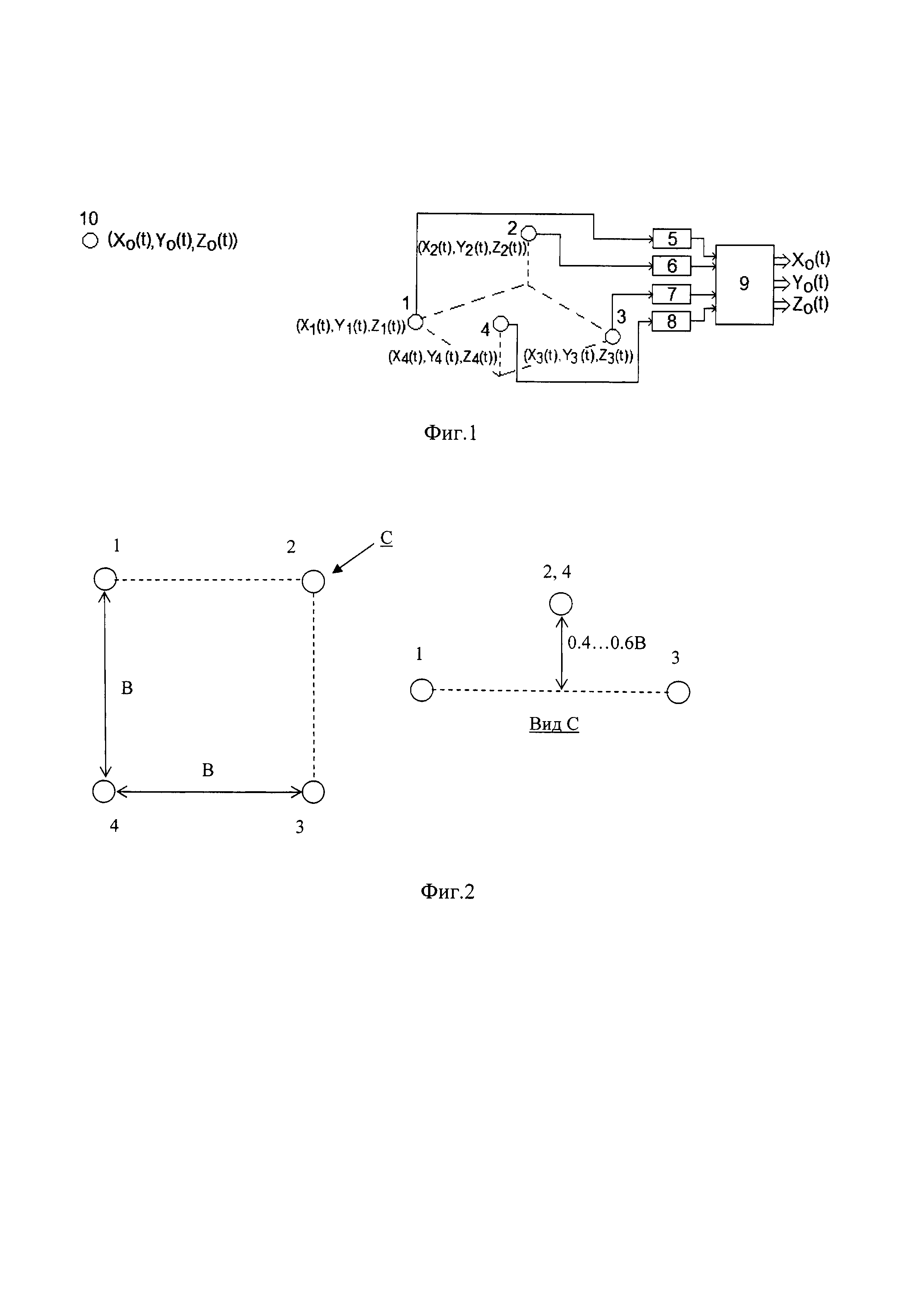
Способ дегозации нефтесодержащих вод
Способ и система определения относительного положения летательных аппаратов

