Результат интеллектуальной деятельности: БОРТОВОЙ ОБНАРУЖИТЕЛЬ С КОМПЕНСАЦИЕЙ ВАРИАЦИЙ МАГНИТНЫХ ПОЛЕЙ
Вид РИД
Изобретение
Изобретение относится к радиолокации, в частности к устройствам обнаружения отраженных от объектов сигналов с помощью бортовой аппаратуры летательного аппарата.
Обнаружение и распознавание объектов, скрытых на поверхности земли, под землей, на поверхности воды и под водой становится одной из важнейших задач, которую можно решить при создании обнаружителя аномалий электромагнитных полей, размещаемого на летательных аппаратах (вертолетах, самолетах, космических аппаратах). Образцы техники - носители вариаций магнитного поля Земли, надводные, подводные и наземные объекты с большой вероятностью можно отнести к стационарным объектам. В этом случае, при обнаружении объекта с вариациями магнитного поля, необходимо при получении параметров объекта учитывать вариации магнитного поля Земли, а также влияние атмосферы, для внесения поправок в расчеты.
Известен способ поиска и обнаружения подводных объектов при помощи бортовых магнитометрических средств, установленных на авиационном носителе (Яроцкий В.А. Методы обнаружения и определения местоположения объектов по их постоянному магнитному полю. // Зарубежная радиоэлектроника, №3, 1984 г., стр. 48.). Этот способ включает обследование назначенного района поиска подводного объекта прямолинейными параллельными галсами при помощи скалярного магнитометра, установленного на подвижном носителе. Недостатком указанного способа является небольшая вероятность правильного обнаружения, если курсы движения носителя не согласованы с физическими параметрами, которыми характеризуется район поиска.
Известен способ определения местоположения объекта на местности (Кондратенков Г.С., Фролов А.Ю. Радиовидение. // М: Радиотехника, 2005 г.), при котором с летательного аппарата с помощью радиолокатора с синтезированной апертурой лоцируют местность и формируют ее радиолокационное изображение, затем обнаруживают объекты (см. там же раздел 7.3), проводят их распознавание (см. там же раздел 7.4) и осуществляют привязку объектов к радиолокационному изображению, например, за счет привязки к ориентирам на местности (см. там же раздел 7.5). Такой способ выявления объекта и определения его положения на местности для летательного аппарата трудно реализуем, так как радиолокатор с синтезированной апертурой с необходимыми для этого характеристиками достаточно сложен.
Известны радиолокационные устройства, использующие одночастотные бинарные фазоманипулированные сигналы и их стандартные спектрально-корреляционные Фурье-преобразования.
Наиболее близким аналогом является двухчастотный когерентно-корреляционный радиолокатор (патент RU 2332681 C2, приоритет от 16.10.2006). Он предназначен для обнаружения отраженных от целей сигналов. В известном радиолокаторе применяют формы зондирующего сигнала-посылки на основе двухчастотных широкополосных шумоподобных дискретных частотно-манипулированных сигналов с непрерывной фазой (ШП ДЧМНФ), формируемых передатчиком, применяют сквозную когерентно-корреляционную обработку отраженного ШП ДЧМНФ сигнала с использованием нелинейного инвариантного сжатия широкополосного спектра сигнала в узкополосный, близкий к S-функции, и специфической свертки во времени отраженного сигнала. Зондирующий сигнал-посылка передатчика состоит из двух частей, каждая из которых включает набор дискретов. Первая часть посылки состоит из хаотически меняющихся комбинаций дискретов (модулируется шумом); вторая часть посылки представляет собой псевдослучайную последовательную структуру. Отраженный сигнал обрабатывается в приемнике двояким образом. В регенераторе производится сжатие спектра всей длительности отраженного сигнала, т.е. он становится чисто синусоидальным. В схеме свертки во времени обрабатывается только вторая часть отраженного сигнала. Недостатком известного устройства является ограниченная область применения в обнаружении и измерении магнитометрических параметров отраженных от целей сигналов при компенсации вариаций магнитного поля Земли. К недостаткам можно также отнести то, что в системах обнаружения и измерения отслеживание входного возмущения сигналом, созданным типовой следящей системой, сопровождается динамическими ошибками. В этих динамических ошибках есть некоторое принципиальное ограничение применения следящих систем (в том числе с фазовой автоподстройкой частоты и с частотной автоподстройкой). В компенсации входного возмущения следящей петли системы используется сигнал, искусственно инструментально созданный аппаратурой, а не зондирующий сигнал. Приемопередающая антенна не позволяет получить постоянную, без провалов диаграмму направленности и равномерный, постоянный коэффициент усиления антенны в широком рабочем диапазоне частот, независимо от принимаемых сигналов на рабочих частотах, что снижает точность измерения параметров сигналов аппаратурой, предназначенной для инструментального контроля при измерении мощностных магнитометрических параметров отраженных от целей сигналов и, кроме того, при приеме отраженных сигналов не учитываются магнитные поля носителей вариаций магнитного поля Земли.
Техническая задача, поставленная в заявленном изобретении, состоит в создании устройства, обеспечивающего обнаружение отраженных сигналов от объектов излучения, измерении технических характеристик сигналов, регистрации магнитного поля на участках земной поверхности и в атмосфере для исключения помех на пути распространения радиоволн от передатчика с компенсацией вариаций магнитных полей до объекта излучения и обратно, с учетом вариации магнитного поля Земли, с внесением необходимых компенсационных поправок, с одновременным уменьшением уровня помех и резким уменьшением уровня боковых лепестков спектра сигнала. При этом существенно увеличивается электромагнитная совместимость за счет выполнения антенны, обеспечивающей автоматическое изменение «высоты подвеса» области излучения на спиральном излучателе или, другими словами, автоматическое сохранение «высоты подвеса» излучающей области спирали, равной четверти длины рабочей волны, независимо от значения длины рабочей волны, что позволяет достичь высокого равномерного коэффициента усиления в широкой, практически неограниченной полосе частот и плавной перестройки, обеспечивающей обзор в рабочем диапазоне частот.
Технический результат состоит в повышении помехозащищенности, повышении соотношения «сигнал/шум», а, следовательно, увеличении дальности действия за счет повышения потенциала, структурной чувствительности только к «своим» сигналам, уменьшении влияния активных помех за счет сужения результирующей полосы пропускания приемника, повышении точности измерения координат и увеличении отражающей поверхности объекта за счет определения параметров вариаций магнитного поля и компенсации в случае возникновения ошибок при приеме зондирующих сигналов, а также применения двухчастотного зондирующего сигнала.
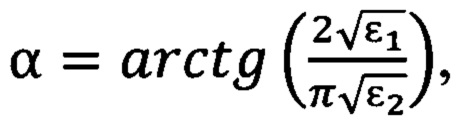
Для этого бортовой обнаружитель с компенсацией вариаций магнитных полей содержит антенное устройство, приемопередающий тракт, электронный переключатель, передатчик зондирующих сигналов, приемник отраженных зондирующих сигналов, генератор пилообразных сигналов, причем антенна своим входом-выходом через приемопередающий тракт подсоединена к входу-выходу электронного переключателя, другой вход которого соединен с выходом передатчика зондирующих сигналов, а другой выход соединен с входом приемника отраженных зондирующих сигналов. Бортовой обнаружитель отличается тем, что в него введены: приемник вариаций магнитного поля Земли, первым и вторым входами и первым выходом подсоединенный к приемопередающему тракту, третьим входом подсоединенный к первому выходу приемника отраженных зондирующих сигналов, а второй, третий и четвертый выходы приемника вариаций магнитного поля Земли соединены соответственно с первым, вторым и третьим входами системы поиска, при этом первый и второй выходы системы поиска соединены соответственно с другим входом передатчика зондирующих сигналов и четвертым входом приемника вариаций магнитного поля Земли, причем антенное устройство выполнено в виде цилиндрического резонатора с заглушенным плоским дном, в которое вершиной направлен спиральный излучатель, навитый на симметричном теле с осью вращения, например конусе, при этом угол а между осью вращения и образующей линией определяется из соотношения где: ε1 - диэлектрическая проницаемость материала тела, на котором навита спираль, а ε2 - диэлектрическая проницаемость среды, заполняющей резонатор, а расстояние от плоского дна резонатора до каждого витка равно πd/4, т.е. λ/4 внешние стенки цилиндрического резонатора выполнены из токопроводящего материала, например алюминия, а внутренние стенки цилиндрического резонатора образуют полеобразующую систему, на внутренней боковой стороне которой прикреплен нанокомпозитный мультиферроидный материал, на дне резонатора находится соленоид, внутри которого размещены: магнитная матрица из нанокомпозитного мультиферроидного материала, первый матричный преобразователь магнитных полей, магниточувствительная пленка и второй матричный преобразователь магнитных полей, вершина спирального излучателя и матричный преобразователь через отверстие на заглушенном плоском дне резонатора соединены с первым входом приемопередающего тракта, первый выход которого соединен с входом соленоида, система поиска выполнена в виде последовательно соединенных - бортовой вычислительной аппаратуры, вентиля и направленного разветвителя, один выход которого соединен с управляющим входом высотомера, а другой выход является вторым выходом системы поиска, и блок вычислительных средств, первый, второй и третий входы которого являются первым вторым и третьим входами системы поиска, четвертый вход блока вычислительных средств соединен с выходом высотомера, а его выход соединен с входом бортовой вычислительной аппаратуры, при этом бортовая вычислительная аппаратура предназначена для обнаружения источника излучения и формирования сигнала управления приемом и передачей зондирующих импульсов, блок вычислительных средств предназначен для уточнения параметров высоты бортового обнаружителя, обработки параметров принятого сигнала с вариациями магнитного поля Земли, а приемник вариаций магнитного поля Земли предназначен для обеспечения в реальном масштабе времени регистрации с измерением относительного уровня напряженности вариации магнитного поля Земли и влияния атмосферных помех, магнитных аномалий в окружающей Землю атмосфере в областях, оказывающих влияние на распространение радиоволн.
где: ε1 - диэлектрическая проницаемость материала тела, на котором навита спираль, а ε2 - диэлектрическая проницаемость среды, заполняющей резонатор, а расстояние от плоского дна резонатора до каждого витка равно πd/4, т.е. λ/4 внешние стенки цилиндрического резонатора выполнены из токопроводящего материала, например алюминия, а внутренние стенки цилиндрического резонатора образуют полеобразующую систему, на внутренней боковой стороне которой прикреплен нанокомпозитный мультиферроидный материал, на дне резонатора находится соленоид, внутри которого размещены: магнитная матрица из нанокомпозитного мультиферроидного материала, первый матричный преобразователь магнитных полей, магниточувствительная пленка и второй матричный преобразователь магнитных полей, вершина спирального излучателя и матричный преобразователь через отверстие на заглушенном плоском дне резонатора соединены с первым входом приемопередающего тракта, первый выход которого соединен с входом соленоида, система поиска выполнена в виде последовательно соединенных - бортовой вычислительной аппаратуры, вентиля и направленного разветвителя, один выход которого соединен с управляющим входом высотомера, а другой выход является вторым выходом системы поиска, и блок вычислительных средств, первый, второй и третий входы которого являются первым вторым и третьим входами системы поиска, четвертый вход блока вычислительных средств соединен с выходом высотомера, а его выход соединен с входом бортовой вычислительной аппаратуры, при этом бортовая вычислительная аппаратура предназначена для обнаружения источника излучения и формирования сигнала управления приемом и передачей зондирующих импульсов, блок вычислительных средств предназначен для уточнения параметров высоты бортового обнаружителя, обработки параметров принятого сигнала с вариациями магнитного поля Земли, а приемник вариаций магнитного поля Земли предназначен для обеспечения в реальном масштабе времени регистрации с измерением относительного уровня напряженности вариации магнитного поля Земли и влияния атмосферных помех, магнитных аномалий в окружающей Землю атмосфере в областях, оказывающих влияние на распространение радиоволн.
Приемник вариаций магнитного поля Земли содержит усилитель принимаемых сигналов, выход которого через направленный разветвитель соединен с входами измерителя уровней амплитуды и мощности принимаемых сигналов и измерителя частоты принимаемых сигналов, выходы которых являются вторым и третьим выходом приемника вариаций магнитного поля Земли, четвертый выход которого является выходом амплитудного селектора, микроконтроллер, выход которого через первый электронный ключ соединен с входом запуска импульсного генератора, выход которого соединен с входом второго электронного ключа, другой вход которого соединен с выходом блока управления запуском, другие его выходы соединены соответственно с входом микроконтроллера и входом запуска амплитудного селектора, а сигнальный вход блока управления запуском является третьим входом приемника вариаций магнитного поля Земли, при этом входы усилителя принимаемых сигналов, амплитудного селектора, а также выход второго ключа являются соответственно первым и вторым, и четвертым входами и первым выходом приемника вариаций магнитного поля Земли.
Приемник отраженных зондирующих сигналов содержит последовательно соединенные направленный разветвитель, усилитель мощности, квадратор, преобразователь частоты и модуль обнаружения, выходы которого соединены с аналого-цифровым преобразователем (АЦП), выход квадратора через регенератор соединен с входами формирователя тактовой частоты и блока временной свертки, а другие входы блока временной свертки соединены с квадратором непосредственно, выходы формирователя тактовой частоты соединены с тактовыми входами преобразователя частоты и модуля обнаружения, выход блока временной свертки соединен с тактовыми входами АЦП, а второй выход направленного разветвителя является другим выходом приемника отраженных зондирующих сигналов.
Модуль обнаружения выполнен двухканальным, каждый канал состоит из последовательно соединенных первого перемножителя, полосового фильтра, второго перемножителя и фильтра разностной частоты в первом канале и фильтра суммарной частоты во втором канале, выходы фильтров суммарной и разностной частоты соединены с входами АЦП, сигнальный вход модуля обнаружения через выпрямительный диод соединен с третьим входом АЦП.
Бортовой обнаружитель содержит последовательно соединенные: блок эталонной частоты, формирователь частот, формирователь зондирующих посылок и электронный коммутатор, соединенный с входом усилителя мощности, выход которого является выходом передатчика с компенсацией доплеровского смещения частоты, другой выход блока эталонной частоты через синхронизатор соединен с синхровходами электронного коммутатора и цифроаналоговым преобразователем (ЦАП), выходы которого соединены с аналоговыми входами электронного коммутатора и формирователя зондирующих посылок, а также содержит генератор пилообразных сигналов, например генератор линейных частотно-модулированных сигналов, выходы которого соединены с входами управления ЦАП и формирователя зондирующих посылок, при этом вход генератора пилообразных сигналов является управляющим входом, а выход усилителя мощности является соответственно входом и выходом передатчика с компенсацией доплеровского смещения частоты.
Сущность изобретения поясняется чертежами.
На фиг. 1 показана функциональная схема бортового обнаружителя с компенсацией вариаций магнитных полей.
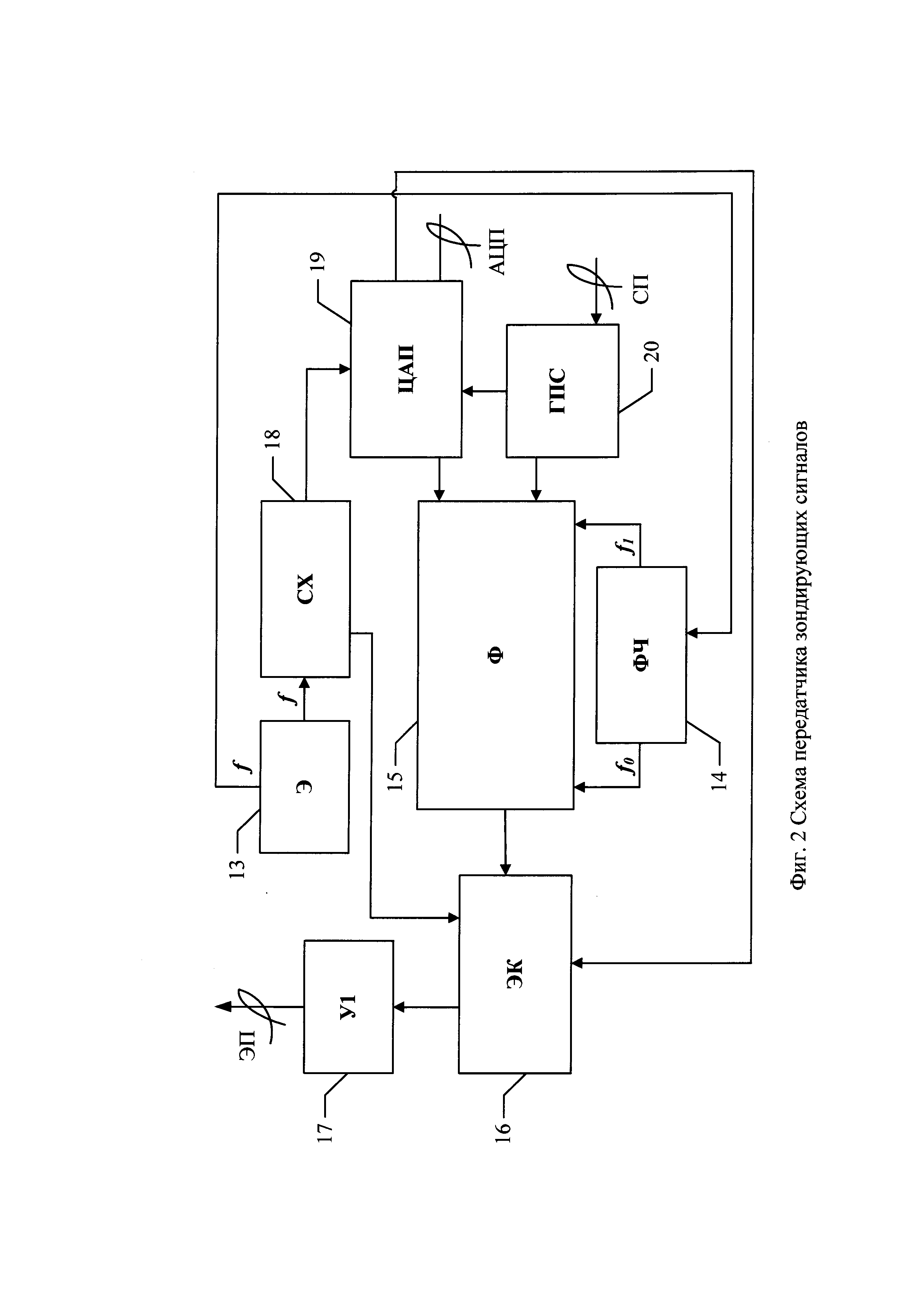
На фиг. 2 - схема передатчика зондирующих сигналов.
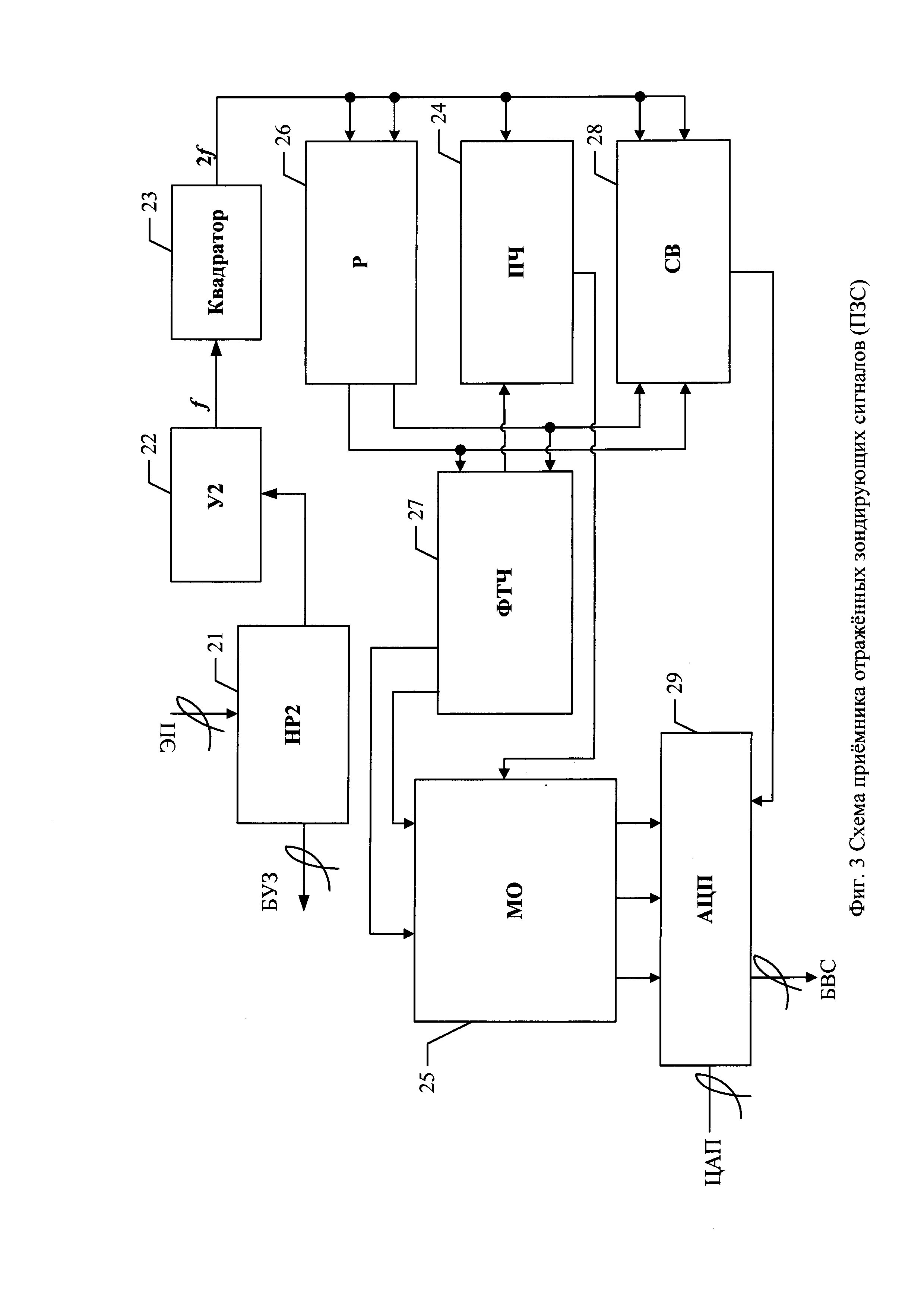
На фиг. 3 - схема приемника отраженных зондирующих сигналов.
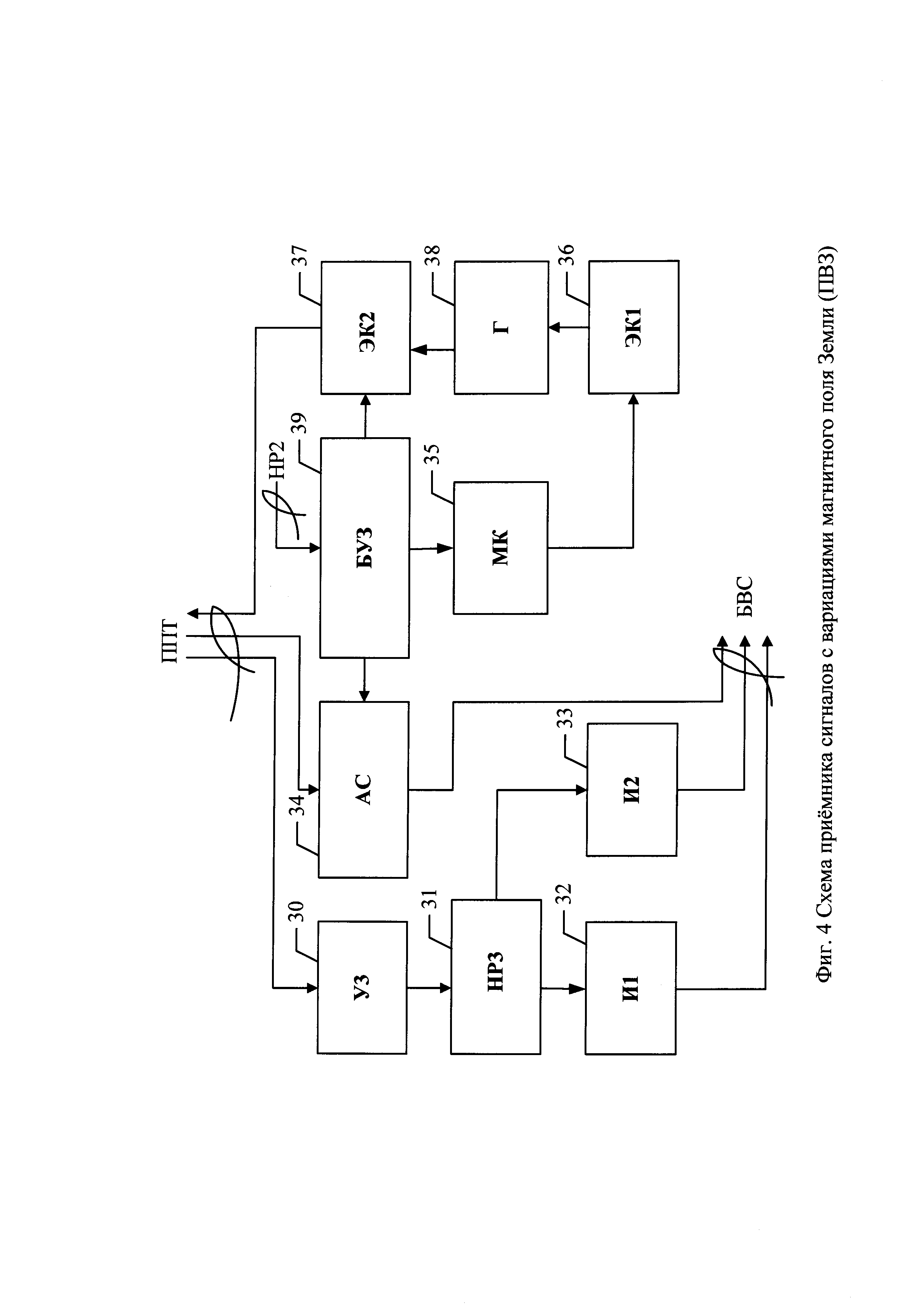
На фиг. 4 - схема приемника сигналов с вариациями магнитного поля Земли.
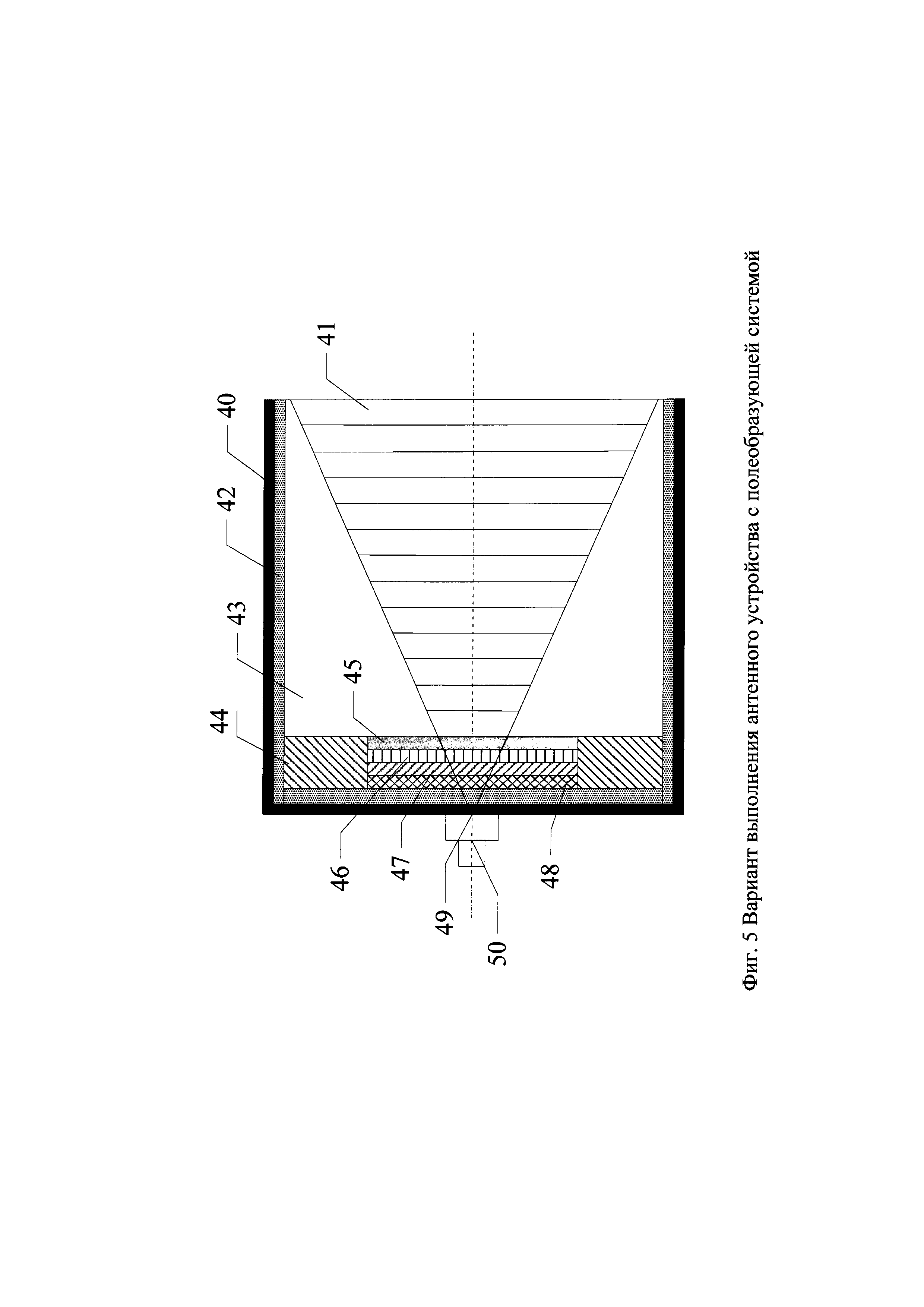
На фиг. 5 показан вариант выполнения антенного устройства с полеобразующей системой.
На фиг. 6 показана схема модуля обнаружения.
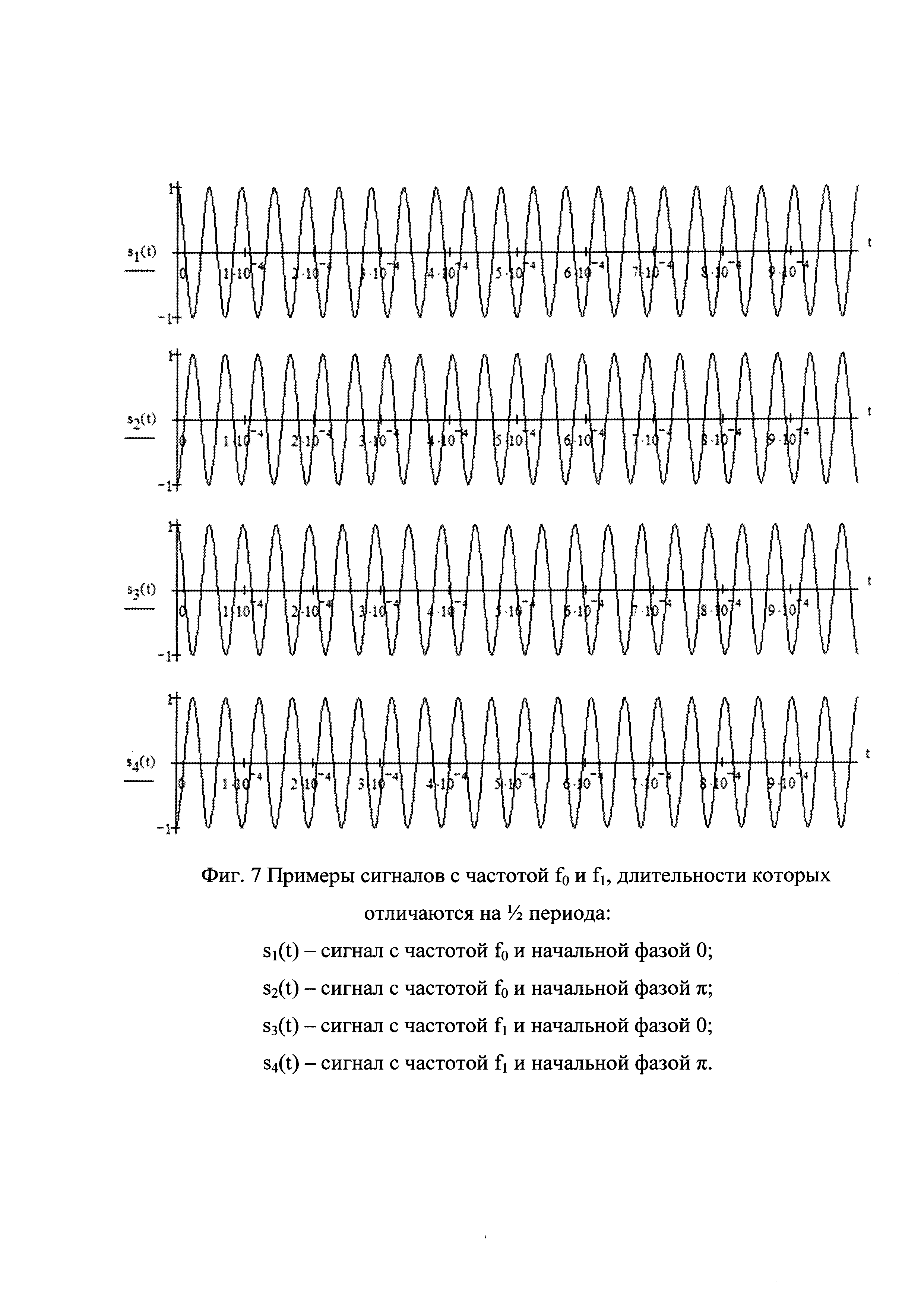
На фиг. 7 - примеры сигналов с частотой f0 и f1 длительности которых отличаются на ½ периода.
На фиг. 8 - структурная схема регенератора.
На фиг. 9 - структурная схема инвариантного сжатия спектра
На фиг. 10 - схема свертки отраженного зондирующего сигнала во времени.
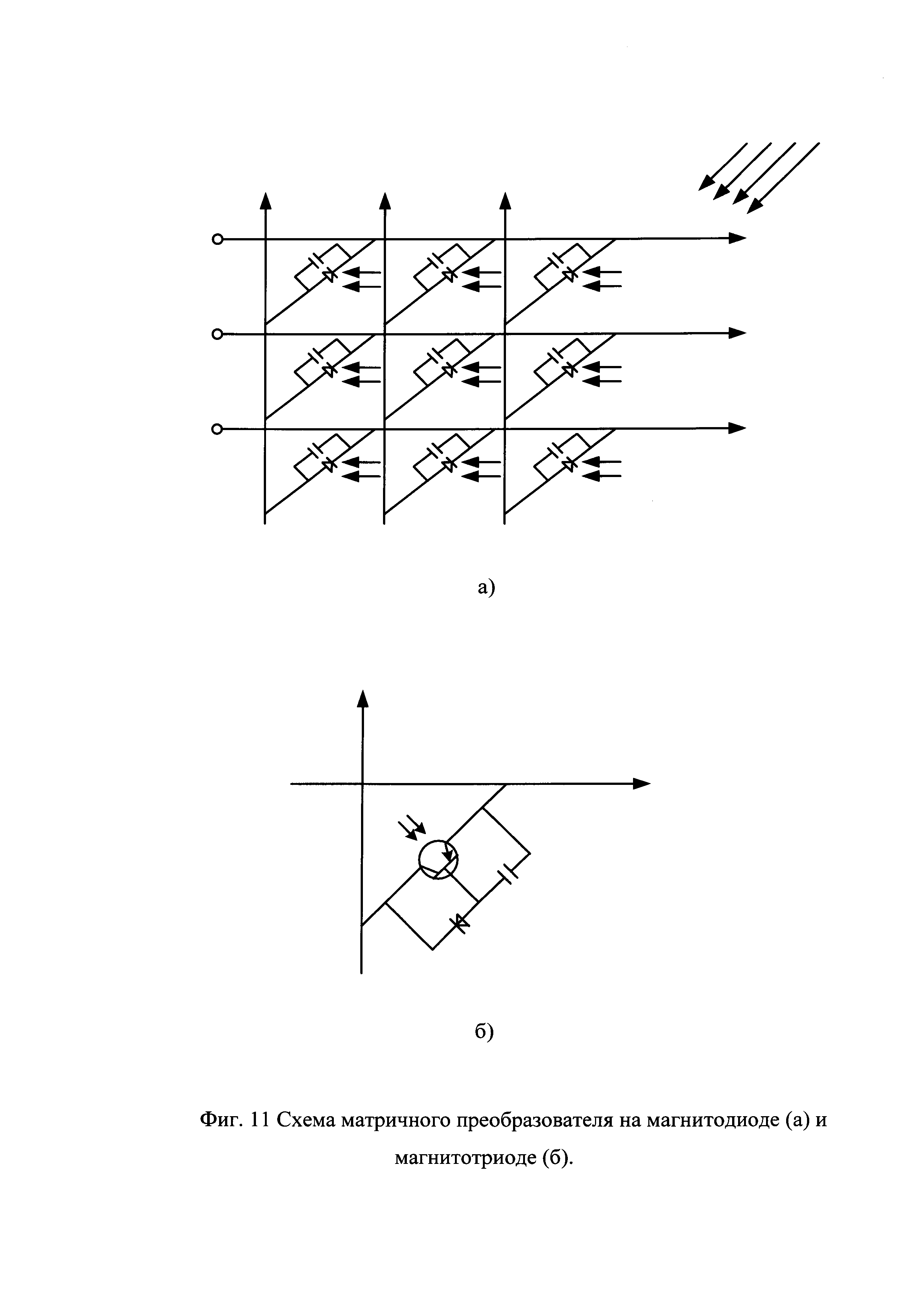
На фиг. 11а, б показаны схемы матричного преобразователя на магнитодиоде (фиг. 11а) и магнитотриоде (фиг. 11б).
Бортовой обнаружитель с компенсацией вариаций магнитных полей (фиг. 1) содержит антенное устройство (АУ) 1, приемопередающий тракт (ППТ) 2, электронный переключатель (ЭП) 3, передатчик зондирующих сигналов 4, приемник отраженных зондирующих сигналов (ПЗС) 5, приемник сигналов с вариациями магнитного поля Земли (ПВЗ) 6, систему поиска (СП) 7, которая включает бортовую вычислительную аппаратуру (БВА) 8, вентиль (В) 9, направленный разветвитель (НР1) 10, высотомер (ВМ) 11, блок вычислительных средств (БВС) 12.
Передатчик зондирующих сигналов 4 содержит (фиг. 2) блок эталонной частоты (Э) 13, формирователь частот (ФЧ) 14, формирователь зондирующих посылок (Ф) 15, электронный коммутатор (ЭК) 16, усилитель мощности (У1) 17, синхронизатор (СХ) 18, ЦАП 19, а также генератор пилообразных сигналов (ГПС) 20.
Приемник отраженных зондирующих сигналов 5 содержит (фиг. 3) направленный разветвитель (НР2) 21, усилитель мощности (У2) 22, квадратор 23, преобразователь частоты (ПЧ) 24, модуль обнаружения (МО) 25, регенератор (Р) 26, формирователь тактовой частоты (ФТЧ) 27, блок временной свертки (СВ) 28 и АЦП 29.
Приемник сигналов с вариациями магнитного поля Земли 6 содержит (фиг. 4) усилитель принимаемых сигналов (У3) 30, направленный разветвитель (НР3) 31, измеритель 32 уровней амплитуды и мощности принимаемых сигналов (И1) и измеритель 33 частоты принимаемых сигналов (И2), амплитудный селектор (АС) 34, микроконтроллер (МК) 35, первый электронный ключ (ЭК1) 36, второй электронный ключ (ЭК2) 37, импульсный генератор (Г) 38, и также блок управления запуском (БУЗ) 39.
Антенное устройство 1 (фиг. 5) выполнено в виде цилиндрического резонатора 40 с заглушенным плоским дном, в которое вершиной направлен спиральный излучатель 41, навитый на симметричном теле с осью вращения, например конусе, а внутренние стенки цилиндрического резонатора образуют полеобразующую систему 43. На внутренней боковой стороне резонатора прикреплен нанокомпозитный мультиферроидный материал 42, на дне резонатора находится соленоид 44, внутри которого размещены: магнитная матрица из нанокомпозитного мультиферроидного материала 45, первый матричный преобразователь магнитных полей 46, магниточувствительная пленка 47 и второй матричный преобразователь магнитных полей 48.
Вершина спирального излучателя и матричный преобразователь через отверстие 49 на заглушенном плоском дне резонатора соединены посредством соединителя 50 с первым входом приемопередающего тракта, первый выход которого соединен с входом соленоида.
Модуль обнаружения 25 (фиг. 6) выполнен двухканальным. Каждый канал состоит из первых перемножителей 51, полосовых фильтров 52, вторых перемножителей 53, фильтра 54 разностной частоты и фильтра 54 суммарной частоты, АЦП 55 и выпрямительного диода.
Для исключения помех на пути распространения радиоволн от передатчика до объекта излучения и обратно необходимо построение системы обнаружителя с перестраиваемой частотой излучаемого сигнала передатчиком таким образом, чтобы отраженный от объекта сигнал был бы с постоянной частотой, а доплеровский сдвиг обнаружителя аномалий электромагнитных полей инструментально компенсировался, как объекта перемещения, размещенного на летательном аппарате.
Заявленный бортовой обнаружитель выявляет и измеряет магнитометрические и электромагнитные параметры магнитных полей объектов - носителей вариаций магнитного поля Земли, отраженных от стационарных объектов с учетом вариаций магнитного поля Земли при компенсации доплеровского смещения во время приема зондирующего сигнала, для распознавания объектов, замаскированных на поверхности земли, под землей, на поверхности воды. Заявленное изобретение осуществляет работу в магнитном поле Земли в пределах распространения радиоволн, в рабочем диапазоне волн.
Измерения и проверка магнитометрических и электромагнитных параметров каждого источника излучения осуществляется индивидуально и последовательно.
Поиск источников излучения во время мониторинга земной поверхности может проводиться бортовой вычислительной аппаратурой 8, размещенной на летательных аппаратах. При обнаружении неизвестного источника излучения (в пределах диаграммы направленности антенны летательного аппарата), представляющего интерес с целью получения параметров объекта источника излучения, бортовая аппаратура летательного аппарата формирует управляющий сигнал для инициализации бортового обнаружителя с компенсацией вариаций магнитных полей, высотометра и измерителя магнитного поля Земли.
Управляющий сигнал поступает на вход передатчика зондирующих сигналов 4 и блока управления запуском 39 и, одновременно, через направленный разветвитель 10, для включения высотомера 11. Полученные данные от бортового обнаружителя с компенсацией вариаций магнитных полей поступают в блок вычислительных средств 12, где обрабатываются, запоминаются и поступают в бортовую вычислительную аппаратуру 8 летательного аппарата для принятия решения.
Передатчик зондирующих сигналов 4 с компенсацией доплеровского смещения частоты предназначен для формирования короткого, относительно длительности зондирующей посылки, сигнала с линейным изменением частоты и компенсацией доплеровского смещения частоты отраженного от объекта сигнала, путем изменения частоты зондирующих сигналов -двухчастотных частотно-манипулированных шумоподобных сигналов PN MSK (Pseudo Noise Minimum Shift Keying) передатчика с индексом частотной модуляции 0,5, т.е. реализуется работа на частотах f0 и f1 органически объединенных в единую когерентно работающую структуру обработки частотно-манипулированных шумоподобных сигналов.
Приемник 5 отраженных зондирующих сигналов электромагнитного излучения от объекта - узкополосный, предназначен для приема отраженного от объекта сигнала, создания управляющего сигнала передатчику для его приостановки, линейного изменения частоты, фиксации (запоминания) в момент t1 и, при перемещении приемника в составе бортового обнаружителя с компенсацией вариаций магнитных полей к объекту или от него, для отслеживания доплеровского смещения частот, которое меняется на относительно малую величину fД и отражается на выходной частоте сигнала приемника f0+fД.
Полученная поправка fД, после преобразования и суммирования с запомненной частотой, поступает на вход передатчика для обеспечения автоматического управления доплеровским смещением частоты бортового обнаружителя с компенсацией вариаций магнитных полей.
Приемник 6 вариаций магнитного поля Земли предназначен для обеспечения в реальном масштабе времени регистрации с измерением относительного уровня напряженности вариаций магнитного поля Земли и влияния атмосферных помех. Указанные явления определяют условия передачи и приема зондирующих сигналов и распространения радиоволн, и в одних случаях они использованы, а в других - учтены при работе радиолиний.
Антенное устройство 1 (фиг. 5) предназначено для излучения зондирующего сигнала с линейно растущей частотой (ЛЧМ), осуществления поиска объекта в пределах диаграммы направленности антенны. При появлении объекта в момент t1 антенное устройство переключается управляющим сигналом приемника в режим приема появившегося отраженного от объекта сигнала и одновременно подключается приемник 6 вариаций магнитного поля Земли.
С внутренней стороны резонатора 40 размещен преобразователь электромагнитного поля - нанокомпозитный мультиферроидный материал 42. Преобразователь электромагнитного поля, представляющий собой объемную (3D периодически упорядоченную) слоистую частотно зависимую среду, с пространственной в диапазоне от 50 до 300 нм модуляцией магнитных и электрических свойств, имеет размер активных областей (кластеров) в диапазоне от 5 до 50 нм. Преобразователь электромагнитного поля выполняет функции электромагнитной линзы, фокусирующей суммарное электромагнитное поле резонатора 40, собственное электромагнитное поле и поле полеобразующеей системы 43. Динамика резонатора при плавном изменении длины рабочей волны и отсутствии дискретности в количестве резонансных частот в рабочем диапазоне достигается тем, что в антенне 1 излучатель 41 выполнен в виде конуса с вершиной, направленной внутрь резонатора, и расположенного в резонаторе соосно ему.
Угол α между оптической осью антенны и образующей конуса определяется из соотношения

где: ε1 - диэлектрическая проницаемость материала тела, на котором навита спираль; ε2 - диэлектрическая проницаемость среды, заполняющей резонатор.
Такое выполнение антенны обеспечивает автоматическое изменение «высоты подвеса» области излучения на спиральном излучателе или, другими словами, автоматическое сохранение «высоты подвеса» излучающей области спирали, равной четверти длины рабочей волны, независимо от значения длины рабочей волны, что позволяет достичь высокого равномерного коэффициента усиления в широкой, практически неограниченной полосе частот, и плавной перестройки, обеспечивающей панорамный обзор в рабочем диапазоне частот.
Резонатор 40 может быть выполнен, например, из токопроводящего материала алюминия с заглушенным плоским дном с отверстием 49, через которое с помощью приемопередающего тракта 2 антенна подсоединяется к аппаратуре. В режиме приема антенной появившегося сигнала, отраженного от объекта, одновременно подключается приемник 6 вариаций магнитного поля Земли.
При поступлении на вход антенны 1 сигнала, отраженного от объекта, на каждой длине волны возбуждается кольцевая область спирали, длина которой равна рабочей длине волны, а диаметр - d=λ/π. При этом спираль излучает энергию в обе стороны: как в переднюю, так и в заднюю полусферу (в сторону резонатора). В силу того, что диаметр каждого витка ограничен размером тела вращения и изменяется от вершины к периферии в соответствии с заданным соотношением, расстояние от дна резонатора до каждого витка равно πd/4, т.е. λ/4. Такое расстояние обеспечивается за счет разности хода луча любого витка, отраженного от дна, равного половине длины волны, с учетом изменения фазы сигнала на 180° при отражении от плоского дна резонатора 40. Синфазное суммирование прямого и отраженного сигналов в главном направлении согласовывается преобразователем электромагнитного поля, выполненного из нанокомпозитного мультиферроидного материала, т.е. этот процесс автоматически реализуется на любой длине волны.
Излучающее кольцо спирального излучателя 41 автоматически плавно перемещается ближе к отражающей плоскости, выполненной из метаматериала, при работе на коротких волнах и удаляется от него на длинных волнах. Плавное автоматическое изменение «высоты подвеса» резонансного кольца над отражающей поверхностью, также выполненной из нанокомпозитного мультиферроидного материала, при изменении рабочей частоты обеспечивает постоянство формы диаграммы направленности, равномерность и постоянство коэффициента усиления антенны в широком диапазоне частот. При совмещении точки пересечения оси вращения антенны и образующей конического тела вращения под углом а, определяющимся по формуле 1, с плоскостью дна резонатора 40 обеспечивается оптимальный режим работы антенны с максимальным коэффициентом усиления. Антенное устройство 1 позволяет получить постоянную без провалов диаграмму направленности и равномерный, постоянный коэффициент усиления антенны в широком диапазоне частот независимо от отраженных от объекта принимаемых сигналов на рабочих частотах.
Полеобразующая система 43 предназначена в режиме приема антенным устройством определять уровень и вариации магнитного поля Земли. Она создает импульсное магнитное поле, вектор напряженности которого направлен параллельно оси вращения антенного устройства, и создает опорный уровень для измерения вариаций магнитных полей Земли и влияния атмосферных помех, магнитных аномалий в окружающей Землю атмосфере. Суммарным магнитным полем Земли с вариациями и опорным магнитным полем облучается матрица из мультиферроидных материалов, создающая многоуровневую, пространственную равномерность облучения магнитной матрицы, магнито-чувствительной пленки и матричных преобразователей магнитного поля Земли, амплитудные значения которых селектируются и используются с последующим измерением относительного уровня напряженности вариаций магнитного поля и магнитного поля Земли.
В полеобразующей системе 43 соленоид 44 предназначен для создания опорного уровня импульсных магнитных полей. Матрица из нанокомпозитного мультиферроидного материала предназначена для создания и определения возникающих в пространстве барражирования летательного аппарата параметров вариаций магнитного поля; для определения параметров вариаций и локальных участков магнитного поля Земли.
Матричные преобразователи магнитных полей обеспечивают создание электропотенциального рельефа, сигналограммы напряженности магнитного поля.
Соленоид 44 выполнен в форме кольцевой катушки и предназначен для создания импульсного магнитного поля с вектором напряженности, направленным перпендикулярно плоскости матрицы из нанокомпозитного мультиферроидного материала. Матрица размещена соосно в магнитном поле соленоида 44 и представляет собой нанокомпозитный мультиферроидный материал (опал) в виде упорядоченных 3D-нанорешеток с использованием кристаллитов размерами порядка от 15 до 50 нм. Практическая значимость подобных материалов определяется тем, что их самоорганизующимися свойствами, а также составом и строением синтезируемых в полостях материалов, можно управлять через вариации размера шаров SiO2. Для формирования нанокомпозитов возможно использование образцов опаловых матриц с диаметром наношаров SiO2 от 260 до 280 нм. Включения метатитанатов (BaTiO3, SrTiO3, NiTiO3, PbTiO3, FeTiO3) синтезируются из введенных в полости опаловых матриц растворов нитратов соответствующих металлов. Матрица 48 предназначена для изменения своей структуры из лабиринтной в структуру однородного зарождения при возникающих вариациях магнитного поля в пространстве барражирования летательного аппарата и создания отклика (повышение или уменьшение напряженности магнитного поля).
Магнитное поле участков земли, на которых размещен объект, определяется с помощью магниточувствительных пленок, размещенных на матричном преобразователе магнитных полей соосно в магнитном поле соленоида. В результате облучения суммарным магнитным полем, образованным вектором напряженности магнитного поля соленоида, и магнитным полем, преобразованным матрицей из мультиферроидных материалов, что гарантирует многоуровневую, пространственную равномерность, селектируются амплитудные значения с последующим измерением относительного уровня напряженности магнитного поля.
Матричные преобразователи магнитных полей предназначены для получения электропотенциальных вариаций магнитного поля Земли, напряженности магнитного поля на поверхности магниточувствительных элементов матрицы из мультиферроидных материалов и магниточувствительных пленок. Матричные преобразователи магнитных полей выполнены в виде матриц, состоящих из магниточувствительных элементов магнитодиодов или магнитотриодов (фиг. 11а, б) и имеют вход питания и сигнальный выход. Параллельно магнитодиодам подключены накопительные элементы-конденсаторы. В схеме с магнитотриодами конденсаторы подключены в цепь эмиттер-база, а в цепь коллектор-база подключен диод, который задает (смещение) режим работы магнитотриода. Конденсаторы заряжаются до максимального значения напряжения в момент коммутации и постепенно разряжаются между коммутациями до величины напряжения, зависящей от величины напряженности магнитного поля, действующего на магниточувствительный элемент.
Работа бортового обнаружителя с компенсацией вариаций магнитных полей заключается в поиске объекта и решает задачу обнаружения и измерения магнитометрических и электромагнитных параметров магнитных полей объектов - носителей вариаций магнитного поля Земли, то есть сигналов, отраженных от объектов с учетом компенсации вариаций магнитного поля Земли при компенсации доплеровского смещения во время приема зондирующего сигнала, измерении дальности, измерении ЭПР для распознавания объектов, поиске объектов - источников излучения во время мониторинга земной поверхности бортовой аппаратурой, размещенной на летательном аппарате.
При обнаружении материального объекта или источника излучения в пределах диаграммы направленности антенны летательного аппарата, представляющего интерес с целью получения информации о стационарном или перемещающемся объекте на Земле или в воздушном пространстве, а также параметров объекта излучения с учетом коррекции магнитометрических и электромагнитных параметров помех, бортовая аппаратура летательного аппарата формирует управляющий сигнал для инициализации бортового обнаружителя с компенсацией вариаций магнитных полей в рабочий режим излучения зондирующего сигнала и рабочий режим высотометра. Управляющий сигнал от системы поиска 7 с бортовой вычислительной аппаратуры 8 через вентиль 9 и направленный разветвитель 10 поступает на вход передатчика 4 и приемника вариаций магнитного поля Земли 6 в блок управления запуском 39, и, одновременно, через направленный разветвитель 10 для включения высотомера 11. Определение вариаций магнитного поля Земли осуществляется после переключения электронного переключателя 3 в режим приема отраженного от объекта зондирующего сигнала одновременно с приемником зондирующего сигнала электромагнитного излучения от объекта.
Бортовой обнаружитель с компенсацией вариаций магнитных полей реализован в виде двухчастотного когерентно-корреляционного устройства, использующего дискретные частотно-манипулированные сигналы PN MSK с непрерывной фазой и индексом частотной манипуляции 0,5. Эти сигналы имеют определенную структуру во временной и спектральной областях. Она заключается в том, что огибающие спектра и огибающие временной корреляционной функции являются гладкими кривыми, не имеющими боковых лепестков, при условии большого количества дискретов N, следовательно, и функция неопределенности обладает единственным максимумом в центре спектрально-временной плоскости (t-f).
Простейшее аналитическое выражение PN MSK сигнала:

при 0≤t≤N⋅Td,
где Δω=2 πƒ - отклонение частоты текущего дискрета от средней;
Td - период модулирующей последовательности;
D=2Δf⋅Td=0,5 - индекс частотной манипуляции MSK сигналов;
 - средняя частота дискретов;
- средняя частота дискретов;
а=(-1,+1);
k=1, 2, 3,…, N - количество дискретов в посылке. Спектр и корреляционная функция PN MSK сигнала:


Использование в бортовом обнаружителе с компенсацией вариаций магнитных полей сигналов PN MSK обеспечивает необходимые требования для улучшения технических характеристик устройства. Применение PN MSK сигналов позволяет реализовать:
- меньшую ширину спектра, а, следовательно, меньшую требуемую полосу частот;
- почти полное отсутствие боковых лепестков в спектре и корреляционной функции при большом числе дискретов;
- большую помехоустойчивость вследствие меньшего влияния нелинейностей радиоприемного тракта;
- отсутствие зависимости измеряемой дальности от доплеровского смещения частоты;
- увеличение эффективной отражающей поверхности за счет двухчастотного облучения;
- уменьшаются боковые лепестки диаграммы направленности антенного устройства, что позволяет получить постоянную без провалов диаграмму направленности и равномерный, постоянный коэффициент усиления антенны в широком рабочем диапазоне частот.
Управляющий сигнал для инициализации бортового обнаружителя с компенсацией вариаций магнитных полей поступает на вход передатчика 4 и переводит в рабочий режим его составные части. В это время формирователь двухчастотный 14 при выполнении необходимого условия PN MSK сигнала, (индекс частотной манипуляции D=2Δf Td=0,5), формирует значение частот, соответствующих логическим «0» и «1», которые отличаются на величину, равную половине частоты модулирующей последовательности.
Таким образом, за один период псевдослучайной последовательности (ПСП) длительности сигналов f0 и f1 должны отличатся на  периода. Для «сшивки» фаз без скачков требуется два сигнала с частотой f0 и f1 с начальной фазой 0 и два сигнала с такими же частотами, сдвинутые по фазе на π. Примеры сигналов приведены на фиг. 7.
периода. Для «сшивки» фаз без скачков требуется два сигнала с частотой f0 и f1 с начальной фазой 0 и два сигнала с такими же частотами, сдвинутые по фазе на π. Примеры сигналов приведены на фиг. 7.
Для передачи значения «1» используется сигнал с частотой f0, значения «-1» - с частотой f1. Последовательность начинается с сигнала с начальной фазой 0: s1(t) для значения «1» и s3(t) для значения «-1». В последующих дискретах используются сигналы в соответствии с таблицей 1.

В результате получается частотно-манипулированный сигнал без скачков фаз. Сигналы, поступающие с генератора пилообразного сигнала (ГПС) 20, обеспечивают параметры зондирующих сигналов с линейно нарастающей частотой, которые поступают затем в цифро-аналоговый преобразователь 19, для последующего формирования кодовых посылок в соответствии со сформированным дискретом 1…N, приведенном в таблице 1. Сформированная структура зондирующего сигнала в электронном коммутаторе 16 поступает на вход узкополосного усилителя мощности 17. Затем усиленный зондирующий сигнал через электронный переключатель 3 и приемопередающий тракт 2 поступает в антенное устройство 1 и излучается в пространство для обнаружения объекта. При появлении на входе электронного переключателя 3 сигнала, отраженного от объекта, в пределах приема диаграммой направленности антенного устройства 1, например, в момент времени t1, электронный переключатель 3 переводит бортовой обнаружитель с компенсацией вариаций магнитных полей в режим приема. Излучение зондирующего сигнала передатчиком 5 в момент времени t1 прекращается. В режиме приема в момент времени t1 одновременно через направленный разветвитель (НР2) 21 подключаются приемник зондирующего сигнала (ПЗС) 5 электромагнитного излучения от объекта и приемник вариаций магнитного поля Земли 6 (ПВЗ). ПЗС 5 включает входные узлы приемника, узкополосный линейный усилитель 22 соединен с квадратором 23, выход квадратора соединен с каналом регенерации несущих частот дискретов (Р) 26, с каналом преобразователя частоты 24 и свертки 28 во времени второй части отраженного зондирующего сигнала. Для извлечения информации из посылки блоком 18 осуществляется синхронизация принятого сигнала со схемой обработки. В схеме обработки PN MSK сигнала синхронизация осуществляется квадрированием (удвоением частоты) PN MSK сигнала. При этой операции кроме расширения спектра и переноса в другую область частот также изменяется коэффициент частотной манипуляции с D=0,5 до D=1 и возникают две спектральные составляющие на частотах 2f0 и 2f1 которые и используются для синхронизации. За счет сохранения когерентности разность этих спектральных составляющих равна удвоенной частоте следования дискретов 2FT.
Для восстановления частот дискретов и удвоенной средней частоты используется регенератор несущих частот дискретов 26 (Р), работающий по принципу взаимно перекрестного гетеродинирования. Структурная схема регенератора 26 показана на фиг. 8. Регенератор включает: два идентичных частотных канала 2f0 и 2f1 каждый из которых содержит последовательно соединенные входной перемножитель 56, узкополосный фильтр 57, второй перемножитель 58 и делитель частоты 59. Квадрированный сигнал поступает на входы перемножителей, в которых производится вычитание 2f1-2f0=2FT. После прохождения через полосовые фильтры разностные сигналы поступают на вторую пару перемножителей. В результате на выходе регенератора формируются удвоенные несущие частоты дискретов. Для получения удвоенной средней частоты дискретов 2fcp, частота сигналов 2f1 и 2f0 делится на два делителями 59, а затем формируется сумматором 60 путем сложения сигналов f0 и f1. Кроме этого, выходы вторых перемножителей соединены с входами устройства свертки 28 во времени и с входами перемножителя, на выходе которого формируется непрерывное колебание на удвоенной средней частоте 2fcp=f0+f1. Преобразователь частоты выполняет операцию нелинейного инвариантного сжатия спектра сигнала в узкополосный. Нелинейная операция инвариантного сжатия спектра сигнала выполняется схемой устройства показанного на фиг. 9. На входы перемножителя подается квадрированный входной сигнал с квадратора и сигнал 2fcp, сформированный в сумматоре 60 устройством формирования тактовой частоты регенератора несущих частот дискретов. Специфика работы перемножителя заключается в соотношении частот и фаз благодаря когерентности и линейности изменения фаз колебаний, поступающих на его входы. На выходе перемножителя формируется сигнал, состоящий из двух составляющих:

Первая составляющая не содержит количества дискретов (ak), а следовательно, не зависит от внутренней структуры псевдослучайной последовательности (ПСП) и определяется только частотой следования дискретов FT. Вторая составляющая сигнала отфильтровывается узкополосным фильтром с полосой пропускания  и на выходе остается сигнал с частотой FT. Первое слагаемое представляет собой непрерывное синусоидальное колебание в течение времени (n+N)Td. Отсутствие коэффициента ak определяет инвариантность преобразования по отношению к внутренней структуре перемножаемых сигналов. Вторая область с колеблющейся частотой подавляется узкополосным фильтром. Отфильтрованный таким образом отраженный сигнал с тактовой частотой следования дискретов на выходе узкополосного фильтра обладает максимальным соотношением «сигнал-шум».
и на выходе остается сигнал с частотой FT. Первое слагаемое представляет собой непрерывное синусоидальное колебание в течение времени (n+N)Td. Отсутствие коэффициента ak определяет инвариантность преобразования по отношению к внутренней структуре перемножаемых сигналов. Вторая область с колеблющейся частотой подавляется узкополосным фильтром. Отфильтрованный таким образом отраженный сигнал с тактовой частотой следования дискретов на выходе узкополосного фильтра обладает максимальным соотношением «сигнал-шум».
По нему, задержанному относительно зондирующего и превысившего установленный порог сигнала, в аналоговом цифровом преобразователе 29 происходит обработка отраженного сигнала, измерение текущих координат и параметров сопровождаемого объекта. Выработка управляющего напряжения происходит при переключении антенного электронного переключателя 3 в режим излучения передатчика 4 (фиг. 1) с компенсацией доплеровского смещения частоты. В этот момент времени одновременно с переключением антенного электронного переключателя 3 отключается зондирующий сигнал передатчика 4 и замыкается контактная система петли обратной связи. Отраженный от объекта - электромагнитной аномалии сигнал в этой посылке будет иметь частоту эталона, а зондирующий сигнал с передатчика 4 с пилообразной частотой отключается. Принудительная компенсация доплеровского смещения реализуется замкнутой схемой петли обратной связи. Объект, от которого принят отраженный сигнал, «не перемещается» в пространстве, в его сигнале отсутствует доплеровское смещение частоты и как следствие, возникает условие работы приемника 5 на постоянной частоте f0. После этого все отраженные от объекта электромагнитной аномалии сигналы будут иметь частоту эталона f0 в течение всего оставшегося сеанса связи. Таким образом, осуществляется инструментальная компенсация доплеровского смещения. Постоянство рабочей частоты радиолокационного канала позволяет неограниченно увеличивать длительность зондирующего сигнала до непрерывного, повышая потенциал передатчика 4 во много раз и превращает систему обнаружителя аномалий электромагнитных полей из нестационарной с переменными параметрами в стационарную с постоянными параметрами. В схеме свертки отраженного зондирующего сигнала во времени (фиг. 10) осуществляется уточнение дальности путем укорочения второй части посылки с NTd до длительности одного дискрета.
Входной сигнал схемы состоит из двух составляющих:

Первое слагаемое соответствует ak =+1, а второе ak =-1. Свертка сигнала PN MSK характеризуется наличием формирователей псевдослучайной последовательности с периодом Td1-Td(N-1) между каждым отводом линии задержки и сумматором. На входы формирователей подается сигнал с линии задержки и сигналы 2f0 и 2f1 от регенератора несущих частот дискретов, коммутируемые управляющим сигналом.
При прохождении всей посылки на выходе сумматора фильтром с полосой  формируется короткий импульс с амплитудой в N раз больше амплитуды входного колебания. Кроме того, происходит суммирование шума, в результате чего увеличивается его амплитуда в
формируется короткий импульс с амплитудой в N раз больше амплитуды входного колебания. Кроме того, происходит суммирование шума, в результате чего увеличивается его амплитуда в  раз. Корректировка параметров бортового обнаружителя с компенсацией вариаций магнитных полей с учетом измерения высоты высотометром 11 проводится в режиме приема отраженного зондирующего сигнала приемником зондирующего сигнала электромагнитного излучения 5 с одновременно работающим приемником определителем вариаций магнитного поля Земли 6.
раз. Корректировка параметров бортового обнаружителя с компенсацией вариаций магнитных полей с учетом измерения высоты высотометром 11 проводится в режиме приема отраженного зондирующего сигнала приемником зондирующего сигнала электромагнитного излучения 5 с одновременно работающим приемником определителем вариаций магнитного поля Земли 6.
Приемник вариаций магнитного поля Земли 6 (фиг. 4) в реальном масштабе времени начинает регистрировать относительный уровень напряженности вариаций магнитного поля Земли и уровень напряженности магнитного поля Земли при поступлении с приемника зондирующего сигнала от объекта управляющего сигнала, и на вход передатчика 4 о приеме сигнала. Передатчик 4 останавливает передачу на время приема и подключается блок управления запуском 39 бортового обнаружителя с компенсацией вариаций магнитных полей, и одновременно сигнал приходит на направленный разветвитель 10 для включения высотомера 11. Определение параметров значения магнитного поля Земли осуществляется после переключения электронного переключателя 3 в режим приема отраженного от объекта зондирующего сигнала одновременно с приемником зондирующего сигнала электромагнитного излучения 5. В момент времени t1 электронный переключатель 3 переводит бортовой обнаружитель с компенсацией вариаций магнитных полей в режим приема, управляющий импульсный сигнал поступает на вход блока управления запуском 39, который формирует управляющие сигналы и подает их на вход микроконтроллера 35 амплитудного селектора 34 для включения. В соответствии с заложенной программой в микроконтроллере 35 формируются сигналы управления, которые поступают с выхода МК на вход ЭК2 37 для подключения матричных преобразователей магнитных полей 47 и 49 и на вход Эк1 36 для включения импульсного генератора 38. С блока управления запуском 39 в момент времени t по цепи с выхода сигнального на вход микроконтроллера 35 поступает сигнал, который открывает первый ЭК1 36 выполненный, например, в виде тиристора, который запускает импульсный генератор 38, импульсный сигнал с которого после включения ЭК2 37 поступившим управляющим сигналом с блока управления запуском 39, одновременно подключается с матричными преобразователями магнитных полей 48. Импульсный сигнал с генератора 38 возбуждает в катушке соленоида 44 в полеобразующей системе 43 антенного устройства электромагнитное поле. Ток в катушке соленоида 44, а, соответственно, и напряженность магнитного поля, начинает нарастать по синусоидальному закону. Под воздействием этого сигнала в момент времени t+τ/2 (где τ - период собственных колебаний цепи соленоида), уменьшается напряженность магнитного поля катушки соленоида 44. В момент времени t+3/2τ уровень рассеяния энергии на соленоиде 44 достигает значения h, и по сигналу, поступившему на вход ЭК1 36 контакты ЭК1 замыкаются - тиристор закрывается. Суммарные амплитудные максимальные и минимальные значения векторов напряженности магниточувствительных элементов пленки, направленные по нормали, в полеобразующей системе усиливаются и преобразовываются аналоговым цифровым преобразователем в амплитудном селекторе 34. Определение вариаций магнитного поля Земли осуществляется одновременно с определением уровня напряженности магнитного поля Земли. После включения электронного ключа ЭК2 37 поступившим управляющим сигналом с БУЗ 32, одновременно подключаются матричные преобразователи магнитных полей 48, определяющие и фиксирующие вариации магнитного поля, на которых соосно с ними в магнитном поле в непосредственной близости размещена матрица 45. Матрица 45 представляет собой нанокомпозитный мультиферроидный материал в виде упорядоченных 3D-нанорешеток с использованием кристаллитов размерами от 15 до 50 нм. Практическая значимость подобных материалов определяется тем, что их самоорганизующимися свойствами можно управлять через вариации размера шаров SiO2, а также можно управлять составом и строением синтезируемых в полостях материалов.
Матрица предназначена для изменения модификации магнитного состояния и характера ее доменной структуры после воздействия на нее внешними импульсными вариациями магнитного поля.
Сигналограммы вариаций и их амплитудные значения с матричного преобразователя магнитного поля 46, вызванные действием вариаций внешнего импульсного магнитного поля Земли, фиксируются изменением характера доменной структуры матрицы 45. Магниточувствительные элементы матрицы 45 в этот момент передают пространственную картину структуры и магнитные изменения вариации со стороны основного направления, и эту информацию передают на магниточувствительную сторону преобразователя магнитного поля 48. С матричного преобразователя магнитных полей 48 информация усиливается и поступает в направленный разветвитель. Сигналы с одного канала поступают в устройство измерения амплитуды и мощности сигнала электромагнитного излучения и преобразовываются аналоговым цифровым преобразователем 29, а в другой канал с направленного разветвителя сигнал поступает в устройство измерения частоты сигнала электромагнитного излучения вариаций магнитного поля Земли 39. С выходов измерителей считываются их амплитудные значения в цифровом виде.
Все значения в цифровом виде (уровень напряженности магнитного поля Земли; уровень напряженности вариаций магнитного поля Земли и амплитудные значения принятого отраженного зондирующего сигнала) поступают в систему поиска 7 в блок вычисления и обработки параметров объекта 12, на который поступает в цифровом виде информация от высотомера. Затем информация для дальнейшего использования и обработки поступает в бортовую вычислительную аппаратуру летательного аппарата.
Тандемный ответвитель на связанных линиях
Радиоприемное устройство свч
Модуль переключения сигналов свч малой мощности и способ переключения свч-сигналов в развязывающем устройстве
Устройство формирования преднамеренных помех
Многолучевая цифровая активная фазированная антенная решетка с устройством калибровки приёмо-передающих модулей и способ калибровки
Устройство для проверки магнитного рельефа материалов носителей информации
Способ обнаружения объектов бортовым обнаружителем с компенсацией вариаций магнитных полей
Устройство для создания мерцающих помех и способ их формирования
Паста, поглощающая электромагнитное излучение свч-диапазона, и способ ее изготовления
Устройство определения пеленгационных параметров узкополосных радиосигналов
Многослойная пластина устройства для стерильного соединения (сварки) полимерных магистралей из термопластичных материалов полимерных контейнеров
Способ определения нерадиальной проекции вектора скорости цели
Способ определения нерадиальной проекции вектора скорости цели
Способ и устройство стирания записанной информации
Станция активных помех
Одномерный широкодиапазонный фазовый пеленгатор на основе искусственной нейронной сети
Способ распознавания типов манипуляции радиосигналов
Способ и устройство стирания записанной информации (варианты)
Устройство контейнерное оперативного уничтожения информации на магнитных носителях
Способ создания преднамеренных активных сигналоподобных имитационных помех радиоэлектронным средствам

