Результат интеллектуальной деятельности: ЗАРЯД ЭЛЕКТРОТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
[0001] Электротранспортные средства становятся все более широко распространенными. Такие транспортные средства типично заряжаются путем подключения к энергосети общего пользования или могут заряжаться с использованием имеющихся общедоступных ресурсов, например, заряжаться посредством фотоэлектрических элементов с использованием доступного света. Тем не менее, такие ресурсы могут быть недоступными и/или менее эффективными в различных местоположениях в различные времена.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
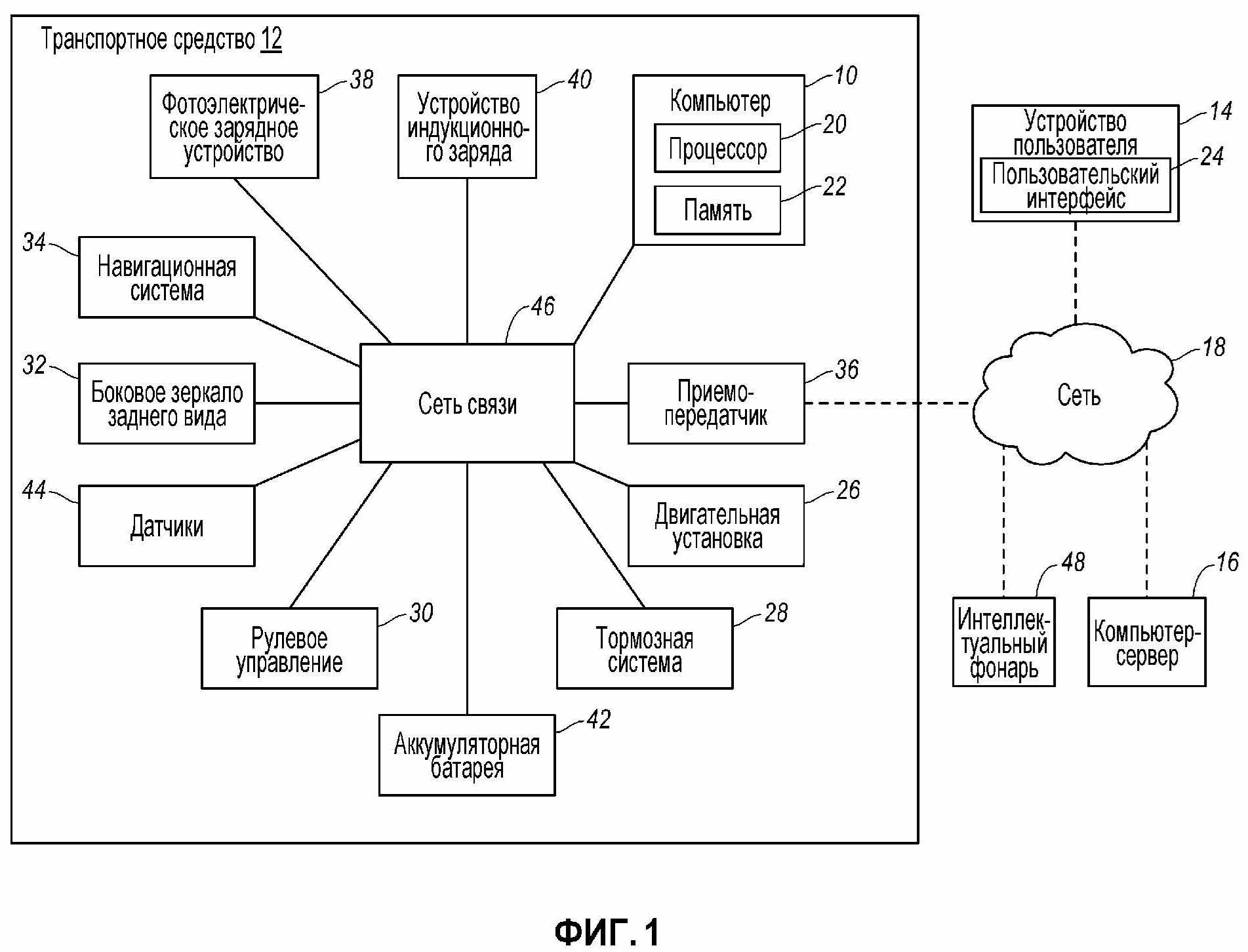
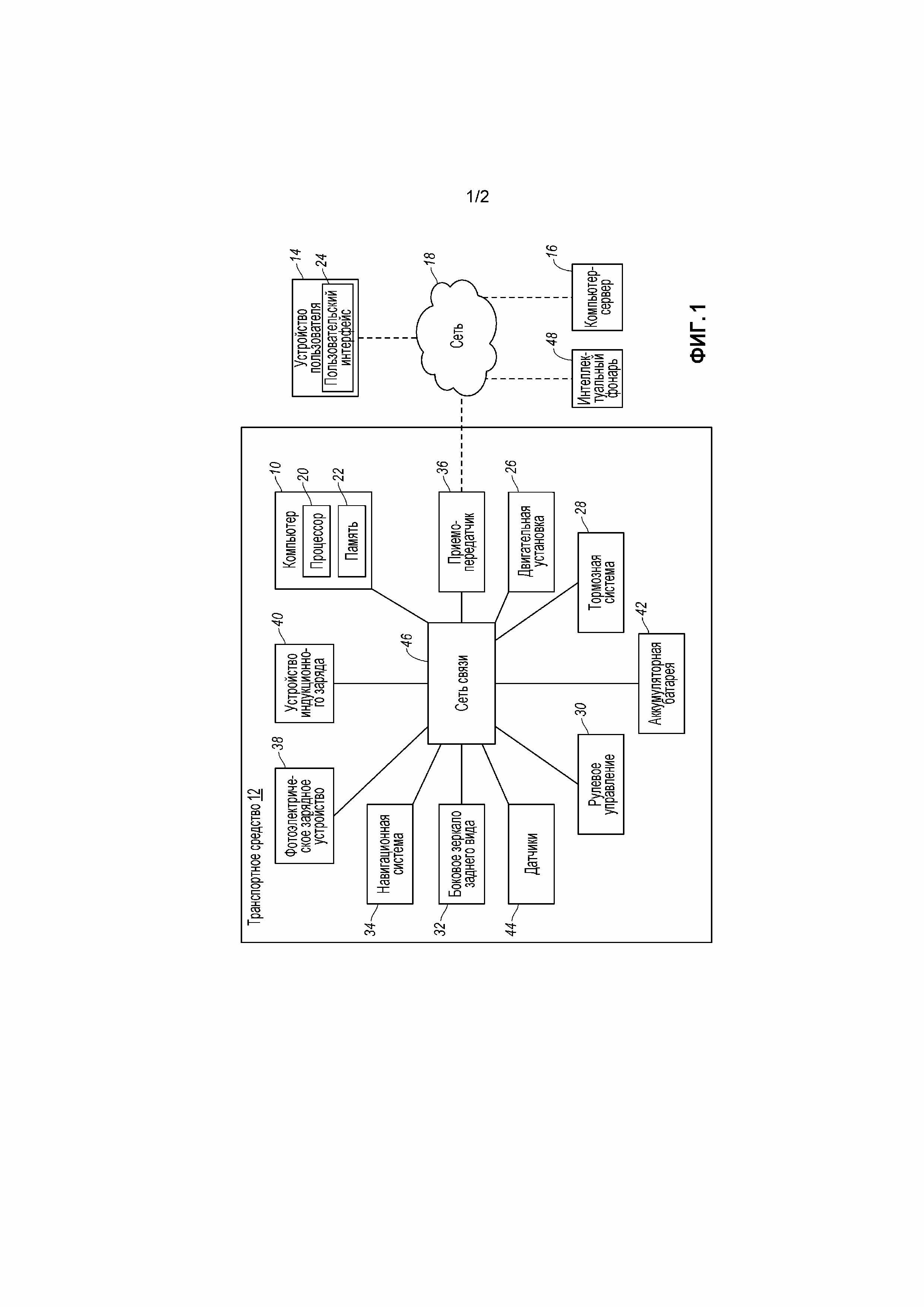
[0002] Фигура 1 является блок-схемой компонентов примерной зарядной системы транспортного средства.
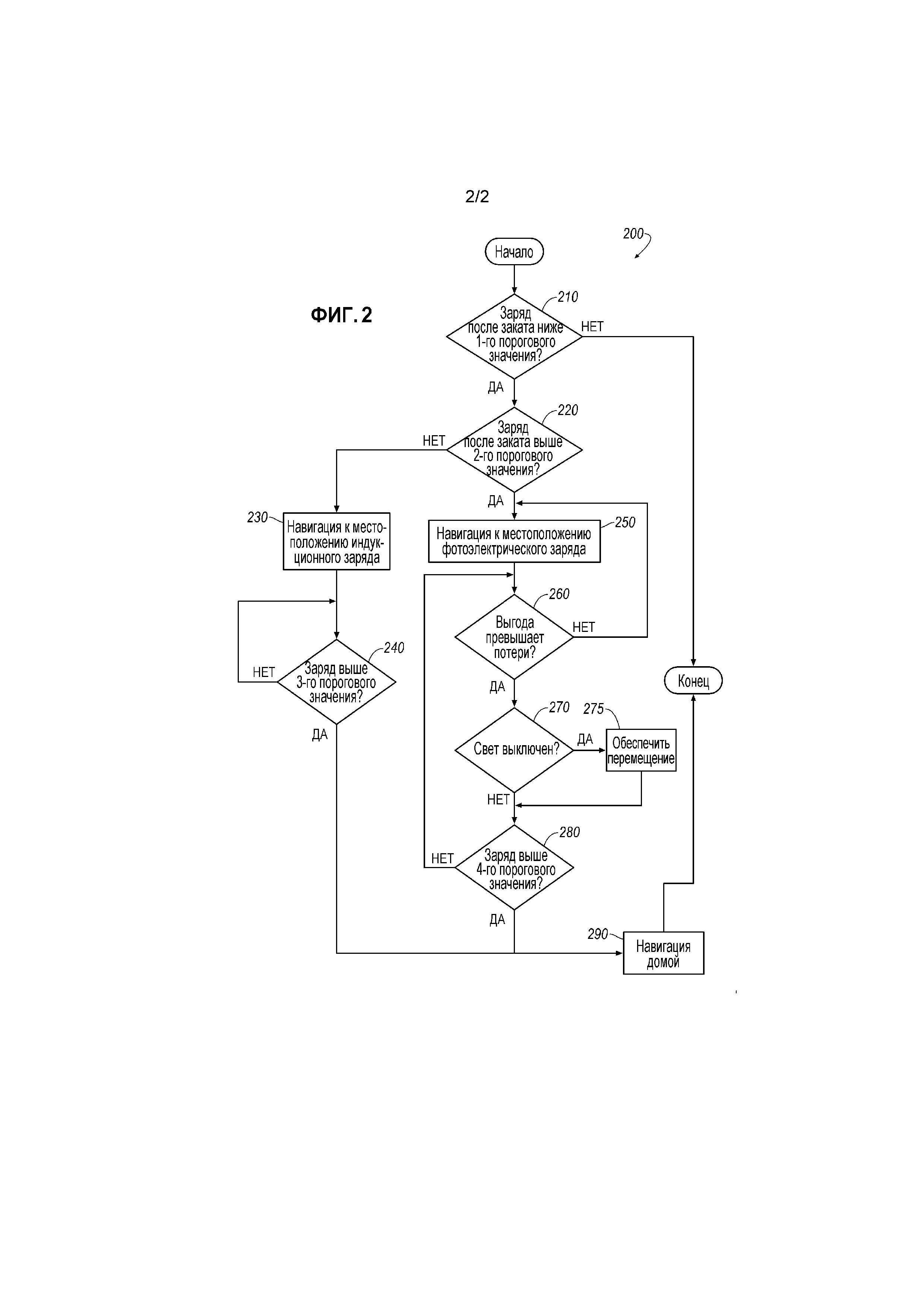
[0003] Фигура 2 иллюстрирует блок-схему последовательности операций примерного процесса заряда с помощью примерной зарядной системы транспортного средства по фигуре 1.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Введение
[0004] Раскрыт способ, содержащий навигацию транспортного средства к местоположению заряда на основе определения, при определении того, что принимаемый транспортным средством свет ниже светового порога, того, что один из текущего уровня заряда транспортного средства и прогнозируемого уровня заряда ниже порога заряда. Местоположением заряда может быть одно из местоположения фотоэлектрического заряда и местоположения индукционного заряда. Местоположением заряда может быть местоположение фотоэлектрического заряда, когда прогнозируемый или текущий уровень заряда выше второго порога. Местоположением заряда может быть местоположение индукционно-фотоэлектрического заряда, когда прогнозируемый или текущий уровень заряда ниже второго порога. Принимаемый транспортным средством свет может идентифицироваться как составляющий ниже светового порога, когда текущее время – после заката.
[0005] Способ дополнительно может содержать навигацию транспортного средства из местоположения фотоэлектрического заряда при определении того, что стоимость пребывания в местоположении фотоэлектрического заряда превышает выгоду от пребывания в местоположении фотоэлектрического заряда.
[0006] Способ может дополнительно содержать определение местоположения фотоэлектрического заряда на основе базы данных местоположений фотоэлектрического заряда.
[0007] Способ может дополнительно содержать определение местоположения фотоэлектрического заряда на основе времени, в которое транспортное средство предназначено работать.
[0008] Способ может дополнительно содержать определение местоположения фотоэлектрического заряда на основе информации, принимаемой от светочувствительного датчика.
[0009] Способ может дополнительно содержать определение фотоэлектрического заряда на основе информации, принимаемой из интеллектуального фонаря.
[0010] Способ может дополнительно содержать определение прогнозируемого уровня заряда на основе текущего уровня заряда, прогнозируемой скорости заряда и количества времени до заката.
[0011] Способ может дополнительно содержать приведение в действие транспортного средства, чтобы обеспечить перемещение, которое может быть воспринято включающимся при движении фонарем, в ответ на определение того, что включающийся при движении фонарь выключился. Такое перемещение может быть обеспечено путем приведения в действие бокового зеркала заднего вида.
[0012] Способ может дополнительно содержать навигацию транспортного средства в местоположение "домой" в ответ на определение текущего уровня заряда, превышающего другое пороговое значение.
[0013] Также раскрыт компьютер, имеющий процессор и запоминающее устройство, запрограммированный с возможностью осуществления части или всего раскрытого способа. Также раскрыт машиночитаемый носитель, хранящий исполняемые компьютером инструкции для осуществления части или всего раскрытого способа.
[0014] Также раскрыта система, содержащая компьютер, запрограммированный осуществлять навигацию транспортного средства к местоположению заряда на основе определения, при определении того, что принимаемый транспортным средством свет ниже светового порога, того, что один из текущего уровня заряда транспортного средства и прогнозируемого уровня заряда ниже порогового значения заряда. Местоположением заряда может быть одно из местоположения фотоэлектрического заряда и местоположения индукционного заряда. Местоположением заряда может быть местоположение фотоэлектрического заряда, когда прогнозируемый или текущий уровень заряда выше второго порогового значения заряда. Принимаемый транспортным средством свет может идентифицироваться как составляющий ниже светового порога, когда текущее время – после заката.
[0015] Компьютер может быть дополнительно запрограммирован осуществлять навигацию транспортного средства из местоположения фотоэлектрического заряда при определении того, что стоимость пребывания в местоположении фотоэлектрического заряда превышает выгоду от пребывания в местоположении фотоэлектрического заряда.
[0016] Компьютер может быть дополнительно запрограммирован определять местоположение фотоэлектрического заряда на основе времени, в которое транспортное средство предназначено работать.
[0017] Компьютер может быть дополнительно запрограммирован определять местоположение фотоэлектрического заряда на основе информации, принимаемой от светочувствительного датчика.
[0018] Компьютер может быть дополнительно запрограммирован определять прогнозируемый уровень заряда на основе текущего уровня заряда, прогнозируемой скорости заряда и количества времени до заката.
[0019] Компьютер может быть дополнительно запрограммирован определять местоположение фотоэлектрического заряда на основе информации, принимаемой из интеллектуального фонаря.
[0020] Компьютер может быть дополнительно запрограммирован приводить в действие транспортное средство, чтобы обеспечить перемещение, которое может быть воспринято включающимся при движении фонарем, в ответ на определение того, что включающийся при движении фонарь выключился.
[0021] Со ссылкой на фиг. 1, компьютер 10 в транспортном средстве 12 запрограммирован осуществлять навигацию транспортного средства 12 к местоположению заряда на основе определения, при определении того, что принимаемый транспортным средством 12 свет ниже светового порога, того, что один из текущего уровня заряда транспортного средства и прогнозируемого уровня заряда ниже порогового значения заряда.
[0022] Такое программирование компьютера 10 решает проблему при зарядке транспортного средства 12 в ситуациях, когда текущие решения не предоставляют техническую архитектуру для зарядки транспортного средства, а именно, то, как обеспечить свет для заряда транспортного средства 12, когда принимаемый транспортным средством 12 свет ниже светового порога, например, после того, как солнце зашло.
[0023] Транспортное средство 12 может связываться с устройством 14 пользователя и/или компьютером-сервером 16, например, с "облачным" сервером, через сеть 18.
[0024] Сеть 18, которая реализуется посредством схем, чипов или других электронных компонентов, обеспечивать проводную или беспроводную связь между множественными компонентами системы или среди них. В некоторых случаях, сеть 18 обеспечивает как проводную, так и беспроводную связь. Примеры проводной связи включают связь по кабелю, волокну или т.п. Примеры протоколов проводной связи включают Ethernet и т.д., Беспроводная связь может реализовываться через вышки сотовой связи, спутники, антенны или т.п. Примеры протоколов беспроводной связи включают Bluetooth®, IEEE 802.11 (в разговорной речи называемый Wi-Fi), протоколы спутниковой связи и протоколы сотовой связи, такие как 3G, LTE и т.д.
[0025] Компьютер-сервер 16 представляет собой вычислительное устройство, которое включает в себя аппаратные средства, например, схемы, чипы, антенны, Ethernet-порты и т.д., и которое запрограммировано с возможностью передавать, принимать и обрабатывать информацию в/из транспортного средства 12, устройства 14 пользователя и других вычислительных устройств, например, через сеть 18. Компьютер-сервер 16 включает в себя процессор и запоминающее устройство, реализованные таким образом, как описано ниже для процессора 20 и запоминающего устройства 22. Компьютер-сервер 16 может быть запрограммирован с возможностью осуществлять процессы, способы и другие операции вычисления и сохранения, в том числе поясненные в данном документе. Компьютер-сервер 16 может использовать любые подходящие технологии, в том числе поясненные в данном документе.
[0026] Устройство 14 пользователя может представлять собой любое из множества самых различных вычислительных устройств, реализованных так, как описано выше для компьютера-сервера 16, например, смартфон, планшетный компьютер, персональный цифровой помощник и т.д.; устройство 14 пользователя может связываться (обмениваться данными) с транспортным средством 12 и компьютером-сервером 16, например, напрямую или через сеть 18. Устройство 14 пользователя может включать в себя пользовательский интерфейс 24. Пользовательский интерфейс 24 представляет информацию пользователю и принимает информацию от пользователя устройства 14 пользователя, например, через сенсорный экран дисплея, клавиатуру, микрофон, динамик и т.д.
Транспортное средство
[0027] Транспортное средство 12 может включать любой автономный пассажирский или коммерческий автомобиль, такой как, к примеру, седан, универсал, полноприводный внедорожник, транспортное средство типа "кроссовер", фургон, минифургон, такси, автобус и т.д. Компьютер 10, иногда называемый контроллером транспортного средства, может быть выполнен с возможностью управления работой транспортного средства 12 независимо от вмешательства водителя-человека, полностью либо в большей или меньшей степени. Компьютер 10 может быть запрограммирован с возможностью управлять двигательной установкой 26, тормозной системой 28, рулевым управлением 30 и/или другими системами транспортного средства.
[0028] Для целей этого раскрытия, автономный режим определяется как режим, в котором управление каждой из двигательной установки 26, тормозной системы 28 и рулевого управления 30 транспортного средства 12 осуществляется одним или более компьютерами; в полуавтономном режиме компьютер(ы) транспортное средства 12 управляет(ют) одной или двумя из двигательной установки 26, тормозной системы 28 и рулевого управления 30 транспортного средства.
[0029] В дополнение к двигательной установке 26, тормозной системе 28 и рулевому управлению 30, транспортное средство 12 может включать в себя боковое зеркало 32 заднего вида, навигационную систему 34, приемопередатчик 36, фотоэлектрическое зарядное устройство 38, устройство 40 индукционного заряда, аккумуляторную батарею 42, датчики 44 и компьютер 10, все из которых связываются между собой через сеть 46 связи.
[0030] Сеть 46 связи транспортного средства 12 включает в себя аппаратные средства, такие как, к примеру, шину связи, для обеспечения связи между компонентами транспортного средства. Сеть 46 связи может обеспечивать проводную или беспроводную связь между компонентами транспортного средства в соответствии с рядом протоколов связи, таких как контроллерная сеть (CAN), Ethernet, Wi-Fi, локальная соединительная сеть (LIN) и/или другие проводные или беспроводные механизмы.
[0031] Двигательная установка 26 транспортного средства преобразует накопленную энергию в движение транспортного средства 12. Двигательная установка 26 может представлять собой известную тяговую подсистему транспортного средства, например, электрический силовой агрегат, включающий в себя аккумуляторные батареи 42, электромотор и трансмиссию, которая передает вращательное движение на колеса; гибридной силовой агрегат, включающий в себя элементы электрического силового агрегата и элементы традиционного силового агрегата, например, двигатель внутреннего сгорания, соединенный сцеплением с трансмиссией, которая передает вращательное движение на колеса; или любой другой тип двигательной установки, требующей накопления электричества. Двигательная установка 26 поддерживает связь с и принимает ввод из компьютера 10 и/или от водителя-человека. Водитель-человек может управлять двигательной установкой 26 посредством, например, педали акселератора и/или рычага переключения передач.
[0032] Тормозная система 28 типично представляет собой известную тормозную подсистему транспортного средства и оказывает сопротивление движению транспортного средства 12, за счет этого замедляя и/или останавливая транспортное средство 12. Тормозная система 28 может представлять собой фрикционные тормоза, такие как, к примеру, дисковые тормоза, барабанные тормоза, ленточные тормоза и т.д.; рекуперативные тормоза; любой другой подходящий тип тормозов; либо их сочетание. Тормозная система 28 поддерживает связь с и принимает ввод из компьютера 10 и/или от водителя-человека. Водитель-человек может управлять тормозной системой 28 посредством, например, педали тормоза.
[0033] Рулевое управление 30 типично представляет собой известную подсистему рулевого управления транспортного средства и управляет поворотом колес. Рулевое управление 30 поддерживает связь с и принимает ввод от руля и/или компьютера 10. Рулевое управление 30 может представлять собой систему реечной передачи с рулевым управлением с использованием электроусилителя, систему рулевого управления по проводам, обе из которых известны в данной области техники, или любую другую подходящую систему.
[0034] Боковое зеркало 32 заднего вида шарнирно смонтировано на транспортном средстве 12 и включает в себя электромеханические компоненты, например, линейный привод, сервоэлектромотор и т.д., чтобы приводить в действие боковое зеркало 18 заднего вида между выдвинутым и убранным состоянием, например, при приеме команды из компьютера 10.
[0035] Навигационная система 34 реализована посредством схем, чипов или других электронных компонентов, которые могут определять текущее местоположение транспортного средства 12. Навигационная система 34 может быть реализована через спутниковую систему, к примеру, глобальную систему позиционирования (GPS). Навигационная система 34 может триангулировать местоположение транспортного средства 12 на основе сигналов, принимаемых от различных спутников на земной орбите. Навигационная система 34 запрограммирована выдавать сигналы, представляющие текущее местоположение транспортного средства 12, например, в компьютер 10 через сеть 46 связи. В некоторых случаях, навигационная система 34 запрограммирована определять маршрут из текущего местоположения в будущее местоположение, включая разработку альтернативных маршрутов, например, если дорога заторена или затоплена. Навигационная система 34 может иметь доступ к виртуальной карте, сохраненной локально в навигационной системе 34, сохраненной в запоминающем устройстве 22 компьютера 10 (пояснено ниже) и/или в компьютере-сервере 16, и прокладывать маршрут согласно данным этой виртуальной карты.
[0036] Приемопередатчик 36 передает и принимает информацию в беспроводном режиме другим приемопередатчикам или от них, обеспечивая возможность обмена сигналами, данными и другой информацией с другими компьютерными и сетевыми системами. Приемопередатчик 36 реализован посредством антенн, схем, чипов или других электронных компонентов, которые могут обеспечивать беспроводную связь. Примерные приемопередатчики 36 включают в себя Wi-Fi-системы, радиопередающие и приемные устройства, системы связи, Bluetooth®-системы, системы сотовой связи и мобильные спутниковые приемопередатчики. Приемопередатчик 36 может связываться (обмениваться данными) с другими транспортными средствами и устройствами, например, устройством 14 пользователя, компьютером-сервером 16, интеллектуальным фонарем 48 (пояснен ниже) и т.д., напрямую, к примеру, через радиочастотную (РЧ) связь, и/или не напрямую, к примеру, через сеть 18.
[0037] Фотоэлектрическое зарядное устройство 38 преобразует свет в электричество. Фотоэлектрическое зарядное устройство 38 может включать в себя один или более фотоэлектрических элементов, подключенных параллельно и/или последовательно, чтобы обеспечить требуемые характеристики электрического выходного сигнала, такие как, к примеру, определенное целевое выходное напряжение, например, 110 Вольт.
[0038] Устройство 40 индукционного заряда принимает энергию в беспроводном режиме, например, в виде переменного магнитного поля, и преобразует энергию в электричество. Устройство 40 индукционного заряда может включать в себя индукционную катушку (которая известна и в силу этого не показана на чертежах).
[0039] Устройство 40 индукционного заряда и фотоэлектрическое зарядное устройство 38 электрически соединены с различными компонентами транспортного средства 12, например, аккумуляторной батареей 42, так что электричество может протекать из устройства 40 индукционного заряда и фотоэлектрического зарядного устройства 38 в аккумуляторную батарею 42.
[0040] Аккумуляторная батарея 42 накапливает электрическую энергию. Аккумуляторная батарея 42 может включать в себя один или более гальванических элементов (аккумуляторов), подключенных последовательно и/или параллельно, чтобы обеспечивать требуемые характеристики напряжения и энергоемкости. Аккумуляторная батарея 42 может быть любого типа, подходящего для электрификации транспортного средства, такого как, например, литий-ионные аккумуляторные батареи, никель-металлогидридные аккумуляторные батареи, свинцово-кислотные аккумуляторные батареи, или ультраконденсаторы, которые используются, например, в подзаряжаемых гибридных электротранспортных средствах (PHEV), гибридных электротранспортных средствах (HEV) или электротранспортных средствах на аккумуляторных батареях (BEV).
[0041] Датчики 44 могут обнаруживать внутренние состояния транспортного средства 12, например, скорость вращения колес, ориентацию колес, уровень заряда аккумуляторной батареи 42, например, с помощью переменных датчика напряжения, двигателя и трансмиссии. Датчики 44 могут обнаруживать позицию или ориентацию транспортного средства 12, например, датчики на основе глобальной системы позиционирования (GPS); акселерометры, такие как, к примеру, пьезоэлектрические датчики или датчики на основе микроэлектромеханических систем (MEMS); гироскопы, такие как, к примеру, кольцевой лазерный гироскоп (КЛГ) или волоконно-оптические гироскопы; блоки инерциальных измерений (IMU); и магнитометры. Датчики 44 могут регистрировать внешнюю обстановку, например, радарные датчики, сканирующие лазерные дальномеры, устройства на основе оптического обнаружения и дальнометрии (лидары), измерители силы света и датчики обработки изображений, такие как, к примеру, камеры. Датчики могут включать в себя устройства связи, например, устройства связи между транспортным средством и инфраструктурой (V2I) или между транспортными средствами (V2V).
[0042] Компьютер 10 представляет собой вычислительное устройство, которое включает в себя процессор 20 и запоминающее устройство 22. Компьютер 10 поддерживает электронную связь, например, через сеть 46 связи, с одним или более входных устройств для предоставления данных в компьютер 10 и с одним или более выходных устройств, которые могут принимать данные и/или инструкции из компьютера 10, например, чтобы приводить в действие выходное устройство. Примерные входные устройства включают: навигационную систему 34, приемопередатчик 36, фотоэлектрическое зарядное устройство 38, устройство 40 индукционного заряда, датчики 44 и т.д., а также другие датчики и/или электронные блоки управления (ЭБУ), которые предоставляют данные в компьютер 10. Примерные выходные устройства, которые могут приводиться в действие компьютером 10, включают: двигательную установку 26, тормозную систему 28, рулевое управление 30, боковое зеркало 32 заднего вида, навигационную систему 34, приемопередатчик 36, фотоэлектрическое зарядное устройство 38, устройство 40 индукционного заряда и т.д.
[0043] Процессор 20 (а также процессоры других вычислительных устройств, упоминаемых в данном документе) реализован посредством схем, чипов или других электронных компонентов и может включать в себя один или более микроконтроллеров, одну или более программируемых вентильных матриц (FPGA), одну или более специализированных схем (ASIC), один или более процессоров цифровых сигналов (DSP), одну или более заказных интегральных схем и т.д. Процессор 20 является программируемым с возможностью обрабатывать данные и сигналы связи, принимаемые через навигационную систему 34, приемопередатчик 36, фотоэлектрическое зарядное устройство 38, устройство 40 индукционного заряда, датчики 44, запоминающее устройство 22 и т.д., а также другие датчики и/или электронные блоки управления (ЭБУ), которые предоставляют данные в компьютер 10, например, по сети 46 связи. Обработка данных и сигналов связи может включать в себя обработку для того, чтобы: осуществлять навигацию транспортного средства 12 к местоположению заряда на основе определения, при определении того, что принимаемый транспортным средством 12 свет ниже светового порога, того, что один из текущего уровня заряда транспортного средства и прогнозируемого уровня заряда ниже порогового значения заряда. Процессор 20 может быть дополнительно запрограммирован с возможностью осуществлять процессы, описанные в данном документе.
[0044] Запоминающее устройство 22 (или устройство хранения данных) реализовано посредством схем, чипов или других электронных компонентов и может включать в себя одно или более из постоянного запоминающего устройства (ROM), оперативного запоминающего устройства (RAM), флэш-памяти, электрически программируемого запоминающего устройства (EPROM), электрически программируемого и стираемого запоминающего устройства (EEPROM), встроенной карты памяти в формате MultiMedia (eMMC), жесткого диска либо любых энергозависимых или энергонезависимых носителей и т.д. Запоминающее устройство 22 может хранить данные, собранные из датчиков 44, и программирование для компьютера 10, например, чтобы выполнять процессы, описанные в данном документе.
[0045] Компьютер 10 запрограммирован с возможностью осуществлять навигацию транспортного средства 12 к местоположению заряда на основе определения того, что один из текущего уровня заряда транспортного средства, когда принимаемый транспортным средством свет ниже светового порога, и прогнозируемого уровня заряда, когда принимаемый транспортным средством свет ниже светового порога, является более низким, чем пороговое значение заряда.
[0046] Компьютер 10 может осуществлять навигацию транспортного средства 12 посредством отправки команд в рулевое управление 30, тормозную систему 28 и двигательную установку 26 через сеть 46 связи на основе информации, принимаемой от навигационной системы 34 и датчиков 44.
[0047] Местоположение(я) заряда может (могут) храниться в навигационной системе 34, запоминающем устройстве 22 компьютера 10 и/или в компьютере-сервере 16. Местоположения заряда могут включать географическое местоположение, например, координаты широты и долготы, и тип местоположения заряда, например, местоположение фотоэлектрического заряда, местоположение индукционного заряда и т.д.
[0048] Компьютер 10 может быть запрограммирован с возможностью осуществлять навигацию к местоположениям заряда различных типов на основе сравнения текущего уровня заряда транспортного средства, когда принимаемый транспортным средством свет ниже светового порога, и/или прогнозируемого уровня заряда, когда принимаемый транспортным средством свет ниже светового порога, со вторым пороговым уровнем заряда, например, 75%. Например, компьютер может осуществлять навигацию транспортного средства 12 в местоположение фотоэлектрического заряда, когда прогнозируемый или текущий уровень заряда выше второго порогового значения заряда, и может осуществлять навигацию транспортного средства 12 в местоположение индукционно-фотоэлектрического заряда, когда прогнозируемый или текущий уровень заряда ниже второго порогового значения заряда.
[0049] Местоположения фотоэлектрического заряда предоставляют свет для преобразования в электричество посредством фотоэлектрического зарядного устройства 38. Примерные местоположения фотоэлектрического заряда включают в себя автомобильные одноуровневые и многоуровневые парковки с верхним освещением, уличную парковку, освещаемую уличным освещением, и т.д.
[0050] Местоположение индукционного заряда предоставляет электромагнитное поле для преобразования в электричество посредством устройства 40 индукционного заряда. Например, на парковочном месте может быть смонтирована индуктивная зарядная площадка. Индуктивная зарядная площадка может отбирать электроэнергию из энергосети общего пользования и преобразовывать эту электроэнергию в переменное электромагнитное поле посредством индукционной катушки.
[0051] Текущий уровень заряда может выявляться компьютером 10 на основе информации от датчика 44 напряжения, который определяет электрическое напряжение аккумуляторной батареи 42, например, 100 Вольт. Компьютер 10 может выявлять текущий уровень заряда, например, 80%, с помощью справочной таблицы и т.п., которая соотносит напряжение с уровнем заряда аккумуляторной батареи, например, сохраненным в запоминающем устройстве 22. Такая справочная таблица может дополнительно соотносить уровень заряда, например, 80%, с количеством электроэнергии, например, 8 киловатт-часов.
[0052] Прогнозируемый уровень заряда, когда принимаемый транспортным средством свет ниже светового порога, может быть основан на текущем уровне заряда, прогнозируемой скорости заряда и количестве времени до заката. Например, когда прогнозируемая скорость заряда является постоянным значением, прогнозируемый уровень заряда может быть найден умножением прогнозируемой скорости заряда, например, 0,5 киловатт, на количество времени до заката солнца, например, 2 часа, и суммируется с величиной электрической энергии, например, 8 киловатт-часов, скоррелированной с текущим уровнем заряда, например, 80%, давая в результате прогнозируемое количество энергии, когда принимаемый транспортным средством свет станет ниже светового порога, например, 9 киловатт-часов. Прогнозируемое количество энергии, когда принимаемый транспортным средством свет ниже светового порога, может использоваться вместе со справочной таблицей, чтобы выявить прогнозируемый уровень заряда, когда принимаемый транспортным средством свет ниже светового порога, например, 90%. Когда прогнозируемая скорость заряда является переменной, умножение может быть заменено более сложной математической операцией, такой как интегрирование. Прогнозируемая скорость заряда может быть определена на основе такой информации, как данные о погоде, указывающие на потенциальную облачность, текущее время суток, время заката, текущая скорость заряда, ретроспективные (статистические) скорости заряда, местоположение транспортного средства 12, количество принимаемого транспортным средством 12 света и т.д., например, принимаемой из компьютера-сервера 16 и обнаруживаемой с помощью датчиков 44.
[0053] Принимаемый транспортным средством свет может идентифицироваться как составляющий ниже светового порога, когда текущее время - это время после заката. После заката, т.е. время между тем, когда солнце заходит и после этого восходит в определенном местоположении, может выявляться компьютером 10 на основе информации, принимаемой компьютером 10 из компьютера-сервера 16, и/или из информации, сохраненной в запоминающем устройстве 22. Например, информационная таблица закатов, коррелирующая различные местоположения, даты и времена заката и восхода, может храниться в запоминающем устройстве 22 и/или в компьютере-сервере 16. Исходя из известных местоположения и даты, компьютер 10 может искать промежуток времени после заката в информационной таблице закатов.
[0054] Выявление того, когда принимаемый транспортным средством свет ниже светового порога, может быть основано на измеренной яркости, например, на основе информации, принимаемой компьютером 10 от датчиков 44, например, светочувствительного датчика. Компьютер 10 может сравнивать измеренную яркость с пороговым уровнем света. Пороговый уровень света может быть сохранен в компьютере 10 при изготовлении транспортного средства 12. Пороговый уровень света может быть определен на основе количества естественного света, обычно доступного до заката, и количества света, обычно доступного в местоположении фотоэлектрического заряда, например, так, что световой порог ниже обычно доступного количества естественного света и выше количества света, обычно доступного в местоположении фотоэлектрического заряда.
[0055] Пороговый уровень заряда, например, в 80%, может быть введен в компьютер 10 в ходе изготовления транспортного средства, введен пользователем, например, через устройство 14 пользователя, определен компьютером 10 на основе ретроспективных (статистических) данных о заряде, прогнозируемого предстоящего использования транспортного средства, ожидаемых доступных условий освещения/погодных условий на следующий день, оставшегося времени до восхода солнца и т.д.
[0056] Компьютер 10 может быть запрограммирован с возможностью определять местоположение фотоэлектрического заряда на основе базы данных местоположений фотоэлектрического заряда. База данных местоположений фотоэлектрического заряда включает в себя информацию, относящуюся к различным местоположениям фотоэлектрического заряда, например, информацию о географических местоположениях, информацию о работе освещения, например, между 19:00 и 5:00 свет в определенном местоположении будет находиться во включенном состоянии, информацию о силе света, например, количестве света, например, в 40 люксов, предусмотренной в данном местоположении, информацию об ограничениях парковки, например, о разрешении или оплате, требуемой для того, чтобы припарковать транспортное средство 12 в данном местоположении, и т.д. База данных местоположений фотоэлектрического заряда может храниться в запоминающем устройстве 22, навигационной системе 34, компьютере-сервере 16 и т.д.
[0057] Например, компьютер 10 может определять местоположение фотоэлектрического заряда с помощью базы данных местоположений фотоэлектрического заряда путем выявления того местоположения фотоэлектрического заряда в базе данных местоположений фотоэлектрического заряда, которое соответствует различным критериям, например, в пределах порогового расстояния, например, 4 мили, во включенном состоянии в течение определенного периода времени, например, с 23:00 до 3:00, предоставление порогового количества света, например, 30 люксов, отсутствие определенных ограничений парковки, например, отсутствие необходимости в разрешении на парковку для инвалидов и т.д. Критерии могут предоставляться пользователем, например, через устройство 14 пользователя. Критерии могут определяться компьютером 10, например, на основе уровня заряда аккумуляторной батареи, намеченного времени использования транспортного средства 12 (пояснено ниже) и т.д.
[0058] Компьютер 10 может принимать данные от светочувствительного датчика 44 транспортного средства 12. Светочувствительный датчик 44 измеряет силу света, например 30 люксов, и/или количество электричества, которое может вырабатываться под действием этого света, например, в 150 Вольт. Примерные светочувствительные датчики 44 включают измерители силы света, камеры, фотоэлектрическое зарядное устройство 38 и т.д. Принимаемая от светочувствительного датчика 44 информация может использоваться для измерения и сохранения информации об освещении для последующего использования и/или для выявления источника света и осуществления навигации транспортного средства 12 ближе к нему.
[0059] Компьютер 10 может быть запрограммирован с возможностью измерять силу света и/или количество электричества, которое может вырабатываться под действием света в некотором местоположении, с помощью светочувствительного датчика 44, например, измерителя силы света или фотоэлектрического зарядного устройства 38. Например, при нахождении транспортного средства 12 на автомобильной парковке, когда принимаемый транспортным средством свет ниже светового порога, транспортное средство 12 может добавлять это местоположение и доступное в нем измеренное количество света в базу данных местоположений фотоэлектрического заряда, например, сохраненную в компьютере 10 транспортного средства 12 и/или компьютере-сервере 16, так что транспортное средство 12 может возвращаться в такое местоположение впоследствии для того, чтобы принимать заряд. Когда местоположение и измеренное количество света добавляются в базу данных местоположений фотоэлектрического заряда на компьютере-сервере 16, такая информация доступна для других транспортных средств, тем самым помогая собирать «краудсорсингом» доступные данные в базе данных местоположений фотоэлектрического заряда.
[0060] Компьютер 10 может быть запрограммирован с возможностью выявлять источник света с помощью светочувствительного датчика 44, например, камеры, и осуществлять навигацию транспортного средства 12 к источнику света, чтобы принимать свет с более высокой силой света. Например, паркуясь в местоположении фотоэлектрического заряда, транспортное средство 12 может выявлять источник света и направление к источнику света, например, с использованием камеры и известных методов обработки изображений. В качестве другого примера, транспортное средство 12 может выявлять ближайшее к источнику света место парковки и осуществлять навигацию к нему, например, с использованием камеры и известных методов обработки изображений, к примеру, когда транспортное средство 12 определяет, что доступный свет ниже величины светового порога, например, когда транспортное средство 12 находится на многоуровневой парковке, которая включает в себя искусственный источник света. Компьютер 10 может осуществлять навигацию транспортного средства 12 к источнику света на основе информации от камеры и навигационной системы 34, например, чтобы гарантировать, что транспортное средство 12 не паркуется на середине дороги, и т.д.
[0061] Компьютер 10 может быть запрограммирован с возможностью определять местоположение фотоэлектрического заряда на основе информации, принимаемой от интеллектуального фонаря 48. Интеллектуальный фонарь 48 включает в себя вычислительное устройство и приемопередатчик, т.е. аппаратные средства, например, схемы, чипы, антенну и т.д., запрограммированные с возможностью переводить интеллектуальный фонарь 48 между включенным и выключенным состояниями и передавать информацию о статусе интеллектуального фонаря 48, например, местоположение интеллектуального фонаря 48, когда интеллектуальный фонарь 48 находится или будет находиться во включенном состоянии, количество света, генерируемого интеллектуальным фонарем, например, 40000 люменов, и т.д. Информация об интеллектуальном фонаре 48 может передаваться по сети 18, например, в транспортное средство 12 и/или компьютер-сервер 16, или через протокол ближней связи, такой как Bluetooth.
[0062] Например, компьютер 10 может принимать информацию из интеллектуального фонаря 48, например через сеть 18, указывающую на то, что интеллектуальный фонарь 48 находится в определенном местоположении и будет находиться во включенном состоянии, генерируя определенное количество света в определенное время. Компьютер 10 может сравнивать эту информацию из интеллектуального фонаря 48 с пороговыми потребностями, как пояснено выше, для определения местоположения фотоэлектрического заряда. Когда информация из интеллектуального фонаря 48 указывает на то, что интеллектуальный фонарь 48 удовлетворяет пороговым потребностям и/или превышает их для местоположений фотоэлектрического заряда в базе данных местоположений фотоэлектрического заряда, например, интеллектуальный фонарь 48 находится ближе на пороговое расстояние (например, 1000 метров), чем любое местоположение заряда в базе данных, генерирует больше света на заданное пороговое значение, например 40000 люменов, и т.д., транспортное средство 12 может определять местоположение интеллектуального фонаря 48 в качестве местоположения фотоэлектрического заряда. Соответственно, транспортное средство 12 может осуществлять навигацию в местоположение интеллектуального фонаря 48.
[0063] Компьютер 10 может быть запрограммирован с возможностью определять местоположение фотоэлектрического заряда на основе намеченного времени использования транспортного средства 12, т.е. прогнозируемого времени суток, в которое пользователь намеревается использовать транспортное средство 12, например, с 15:00 до 16:00. Намеченное время использования транспортного средства 12 может быть основано на вводе пользователем, например, на вводе в устройство 14 пользователя, указывающем на то, что пользователь планирует выйти из дома, чтобы поехать на работу, в определенное время. Намеченное время использования транспортного средства 12 может быть основано на ретроспективных (статистических) данных об использовании транспортного средства 12, например, компьютер 10 может выявлять, что каждый четверг в 2:00 пользователь использует транспортное средство 12 для того, чтобы совершать поездки из определенного местоположения, например, из местной фирмы, чтобы добраться домой. Исходя из намеченного времени использования транспортного средства 12, компьютер 10 может определять местоположение фотоэлектрического заряда, например, чтобы максимизировать заряд, принимаемый между текущим временем и намеченным временем использования.
[0064] Например, компьютер 10 может выявлять количество времени до намеченного времени использования транспортного средства, например, 2 часа. Транспортное средство 12 может определять местоположение фотоэлектрического заряда на основе расстояния до местоположения и количества света, доступного в местоположении. Например, транспортное средство 12 может определить навигацию к более близкому местоположению с меньшей силой света по сравнению с более дальним местоположением с большей силой света вследствие разности времен движения, например, транспортное средство 12 может определять, что движение в течение 15 минут и зарядка в течение 1 часа и 45 минут в местоположении со светом меньшей силы выработают больше электричества (и меньше истощат аккумуляторную батарею) по сравнению с движением в течение 30 минут и зарядкой в течение 1 часа и 30 минут в местоположении со светом большей силы.
[0065] Компьютер 10 может быть запрограммирован на навигацию транспортного средства 12 из местоположения фотоэлектрического заряда при определении того, что стоимость пребывания в местоположении фотоэлектрического заряда превышает выгоду от пребывания в местоположении фотоэлектрического заряда. Стоимость пребывания в местоположении фотоэлектрического заряда в этом контексте является стоимостью в денежном выражении, связанной с этим местоположением фотоэлектрического заряда. Например, местоположением фотоэлектрического заряда может быть местоположение отмеряемой парковки, требующее разрешения оплатой, например, из компьютера 10 в компьютер-сервер 16 через сеть 18. Такая оплата может быть основана на количестве времени, проведенном в этом местоположении, например, 1,00$ за час парковки. Выгода от пребывания в местоположении фотоэлектрического заряда представляет собой электричество, вырабатываемое из света, принимаемого в местоположении фотоэлектрического заряда, например, 0,5 киловатта. Компьютер 10 может преобразовывать вырабатываемое электричество в денежный эквивалент для сравнения со стоимостью пребывания в местоположении фотоэлектрического заряда. Например, транспортное средство 12 может выявлять стоимость получения электричества, например, 1,00$ за киловатт-час, в других местоположениях заряда, например, в местоположении индукционного заряда или при подключении транспортного средства 12 к электросети в местоположении дома пользователя. Соответственно, компьютер 10 может определять то, что стоимость, например, 2,00$ за парковку на час, превышает выгоду, например, 0,50$ за электричество, вырабатываемое в час (1,00$ за киловатт-час x 1 час x 0,5 киловатта). В ответ на такое определение, компьютер 10 может увести транспортное средство 12 из местоположения фотоэлектрического заряда.
[0066] Компьютер 10 может быть запрограммирован с возможностью приводить в действие транспортное средство 12, чтобы обеспечить перемещение, которое может быть воспринято включающимся при движении фонарем, в ответ на определение того, что включающийся при движении фонарь выключился. Например, компьютер 10 может выявить, что источник света перешел в выключенное состояние, например, на основе информации, принятой от светочувствительного датчика 44, например, измерителя силы света, камеры, фотоэлектрического зарядного устройства 38 и т.д. В ответ на такую идентификацию, компьютер 10 может приводить в действие транспортное средство 12, чтобы обеспечить перемещение. Например, компьютер 10 может приводить боковое зеркало 32 заднего вида в движение между выдвинутым и убранным положениями. Дополнительно или альтернативно, компьютер 10 может приводить в действие двигательную установку 26, чтобы переместить транспортное средство 12, например, на 2 фута в направлении вперед.
[0067] Компьютер 10 может быть запрограммирован определять местоположение индукционного заряда, например, на основе базы данных местоположений индукционного заряда. База данных местоположений индукционного заряда может включать в себя информацию, относящуюся к различным местоположениям индукционного заряда, например, географическое местоположение, например, координаты широты и долготы, стоимость электричества, например, 1,00$ за киловатт-час, скорость заряда, например, 100 киловатт, и т.д. База данных местоположений индукционного заряда может храниться в запоминающем устройстве 22 и/или на компьютере-сервере 16.
[0068] Компьютер 10 может быть запрограммирован на навигацию транспортного средства 12 в местоположение "домой" в ответ на определение того, что текущий уровень заряда выше другого порогового значения заряда, например, 95%, как пояснено ниже для третьего и четвертого пороговых уровней заряда.
Процесс
[0069] Фиг. 2 является схемой последовательности операций, иллюстрирующей примерный процесс 200 управления автономным перезаряжаемым электротранспортным средством 12, чтобы максимизировать эффективность заряда в то время, когда солнечный свет недоступен. Процесс 200 начинается на этапе 210, когда транспортное средство 12 включают или иным образом переводят в состояние готовности к работе, в определенное время суток, например, выполненное с возможностью переводить компьютер 10 в состояние пробуждения из состояния ожидания за два часа до заката, на основе измеренной яркости, например, когда компьютер 10 принимает от светочувствительного датчика 44 информацию, указывающую на яркость ниже светового порога, например, 25 люксов, к примеру, когда заходящее солнце и/или облачность уменьшают принимаемый транспортным средством 12 свет, когда прием транспортным средством 12 естественного света не допускается физической конструкцией, например, потолком крытой парковки, и т.д.
[0070] На этапе 210 компьютер 10 определяет, что уровень заряда аккумуляторной батареи 42 находится или будет находиться ниже первого порогового уровня заряда, например, 95%, когда принимаемый транспортным средством свет ниже светового порога. При определении того, что уровень заряда находится или будет находиться ниже первого порогового значения заряда, процесс 200 переходит к этапу 220. При определении того, что уровень заряда не находиться или не будет находиться ниже первого порогового значения заряда, процесс завершается. Альтернативно, процесс может оставаться на этапе 210, чтобы отслеживать то, падает ли уровень заряда аккумуляторной батареи 42 ниже первого порогового уровня заряда.
[0071] На этапе 220 компьютер 10 определяет, что уровень заряда аккумуляторной батареи 42 находится или будет находиться выше второго порогового уровня заряда, например, 80%, когда принимаемый транспортным средством свет ниже светового порога. При определении того, что уровень заряда не находится или не будет находиться выше второго порогового значения заряда, процесс 200 переходит к этапу 230. При определении того, что уровень заряда находится или будет находиться выше первого порогового значения заряда, процесс 200 переходит к этапу 250. Второй пороговый уровень заряда может определяться на основе ожидаемого заряда, который может приниматься в местоположении фотоэлектрического заряда. Местоположения индукционного заряда типично обеспечивают большую мощность, чем местоположения фотоэлектрического заряда, когда принимаемый транспортным средством свет ниже светового порога. Соответственно, второе пороговое значение заряда может быть целевым относительно величины мощности, доступной в местоположении фотоэлектрического заряда, например, чтобы определять, будет ли достаточным местоположение фотоэлектрического заряда или потребуется индукция заряда при подключении к зарядке.
[0072] На этапе 230 компьютер 10 осуществляет навигацию транспортного средства 12 в местоположение индукционного заряда и прием заряда. Например, компьютер 10 определяет местоположение индукционного заряда на основе базы данных местоположений индукционного заряда, осуществляет навигацию транспортного средства 12 в местоположение индукционного заряда на основе информации, принимаемой из навигационной системы 34 и датчиков 44, и прием заряда через устройство 40 индукционного заряда.
[0073] Затем, на этапе 240, компьютер 10 определяет то, что уровень заряда аккумуляторной батареи 42 выше третьего порогового уровня заряда, например, 95%. При определении того, что уровень заряда выше третьего порогового значения заряда, процесс 200 переходит к этапу 290. При определении того, что уровень заряда не выше третьего порогового значения заряда, транспортное средство 12 остается в местоположении индукционного заряда, принимая заряд, при этом этап 240 повторяется с определенными временными интервалами, например, каждые 2 минуты.
[0074] На этапе 250 компьютер 10 осуществляет навигацию транспортного средства 12 в местоположение фотоэлектрического заряда и прием заряда. Например, компьютер 10 определяет местоположение фотоэлектрического заряда, осуществляет навигацию в местоположение фотоэлектрического заряда на основе информации, принимаемой из навигационной системы 34, и прием заряда через фотоэлектрическое зарядное устройство 38. Дополнительно или альтернативно, компьютер 10 может выявлять источник света, обеспечивающий фотоэлектрический заряд, и направление к источнику света относительно транспортного средства 12 и/или парковочное место, ближайшее к источнику света, например, на основе информации, принимаемой из камеры. Компьютер 10 может затем осуществлять навигацию транспортного средства 10 к выявленному источнику света и/или к парковочному месту, например, посредством приведения в действие двигательной установки 26, тормозной системы 28 и рулевого управления 30, на основе информации, принимаемой от датчиков 44 и навигационной системы 34.
[0075] Затем, на этапе 260, компьютер 10 определяет, превышает ли стоимость пребывания в местоположении фотоэлектрического заряда выгоду от пребывания в местоположении фотоэлектрического заряда. При определении того, что стоимость превышает выгоду, процесс 200 возвращается к этапу 250, чтобы осуществлять навигацию транспортного средства 12 в другое местоположение фотоэлектрического заряда. При определении того, что стоимость не превышает выгоду, транспортное средство 12 остается в этом местоположении фотоэлектрического заряда, принимая заряд.
[0076] Затем, на этапе 270, компьютер 10 определяет, выключился ли свет в местоположении фотоэлектрического заряда, например, на основе информации от светочувствительного датчика 44. При определении того, что свет выключился, процесс переходит к этапу 275. При определении того, что свет не выключился, процесс переходит к этапу 280.
[0077] На этапе 275, компьютер 10 приводит в действие транспортное средство 12, чтобы обеспечить воспринимаемое перемещение. Например, компьютер 10 может приводить в действие двигательную установку 26 и/или боковое зеркало 32.
[0078] На этапе 280 компьютер 10 определяет, что уровень заряда аккумуляторной батареи 42 выше четвертого порогового уровня заряда, например, 95%. При определении того, что уровень заряда выше четвертого порогового значения заряда, процесс 200 переходит к этапу 280. При определении того, что уровень заряда не выше четвертого порогового значения заряда, транспортное средство 12 остается в этом местоположении фотоэлектрического заряда, принимая заряд, при этом этап 260, этап 270 и этап 280 повторяются с определенными временными интервалами, например, каждые 2 минуты.
[0079] На этапе 290 компьютер 10 осуществляет навигацию транспортного средства 12 в местоположение "домой". После этапа 280 процесс 200 завершается.
Заключение
[0080] Вычислительные устройства, в общем, включают в себя исполняемые компьютером инструкции, причем эти инструкции могут исполняться одним или более вычислительными устройствами, такими как перечисленные выше. Исполняемые компьютером инструкции могут быть скомпилированы или интерпретированы из компьютерных программ, созданных с использованием множества языков и/или технологий программирования, включая, без ограничения, по отдельности или в комбинации, Java™, C, C++, Visual Basic, Java Script, Perl и т.д. Некоторые из этих приложений могут быть скомпилированы и выполнены на виртуальной машине, такой как виртуальная машина Java, виртуальная машина Dalvik или т.п. В общем, процессор (например, микропроцессор) принимает инструкции, например, из запоминающего устройства, машиночитаемого носителя и т.д. и исполняет эти инструкции, тем самым выполняя один или более процессов, включая один или более из описанных в данном документе процессов. Такие инструкции и другие данные могут сохраняться и передаваться с использованием множества машиночитаемых носителей. Машиночитаемый носитель (также упоминаемый как считываемый процессором носитель) включает в себя любой энергонезависимый (например, материальный) носитель, который участвует в предоставлении данных (например, инструкций), которые могут считываться компьютером (например, процессором компьютера). Такой носитель может принимать множество форм, включая, но не ограничиваясь ими, энергонезависимые носители и энергозависимые носители. Энергонезависимые носители могут включать в себя, например, оптические или магнитные диски и другое постоянное запоминающее устройство. Энергозависимые носители могут включать в себя, например, динамическое оперативное запоминающее устройство (DRAM), которое типично составляет основное запоминающее устройство. Такие инструкции могут передаваться по одной или более средам передачи, включая коаксиальные кабели, медный провод и оптоволокно, в том числе провода, которые содержат системную шину, соединенную с процессором компьютера. Общие формы машиночитаемых носителей включают в себя, например, гибкий диск, дискету, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM, DVD, любой другой оптический носитель, перфокарты, бумажную ленту, любую другую физическую среду с рисунками отверстий, RAM, PROM, EPROM, флэш-EEPROM, любой другой чип или картридж памяти либо любой другой носитель, с которого компьютер может выполнять считывание.
[0081] Базы данных, репозитории данных или другие хранилища данных, описанные в данном документе, могут включать в себя различные виды механизмов для хранения, осуществления доступа и извлечения различных видов данных, включая иерархическую базу данных, набор файлов в файловой системе, базу данных приложений в собственном формате, систему управления реляционными базами данных (RDBMS) и т.д. Каждое такое хранилище данных, в общем, включено в состав вычислительного устройства, использующего компьютерную операционную систему, такую как одна из упомянутых выше, и является доступным через сеть любым одним или более из множества разных способов. Файловая система может быть доступной из компьютерной операционной системы и может включать в себя файлы, сохраненные в различных форматах. RDBMS обычно использует язык структурированных запросов (SQL) в дополнение к языку для создания, хранения, редактирования и выполнения хранимых процедур, к примеру, вышеуказанному языку PL/SQL.
[0082] В некоторых примерах системные элементы могут быть реализованы как машиночитаемые инструкции (например, программное обеспечение) на одном или более вычислительных устройствах (например, серверах, персональных компьютерах и т.д.), сохраненные на связанных с ними машиночитаемых носителях (например, на дисках, запоминающих устройствах и т.д.). Компьютерный программный продукт может содержать такие сохраненные на машиночитаемых носителях инструкции для выполнения функций, описанных в данном документе.
[0083] Относительно носителей, процессов, систем, способов и т.д., описанных в данном документе, следует понимать, что хотя этапы таких процессов и т.д. описаны как осуществляемые согласно определенной упорядоченной последовательности, такие процессы могут осуществляться на практике с описанными этапами, выполняемыми в ином порядке, отличном от порядка, описанного в данном документе. Дополнительно следует понимать, что определенные этапы могут быть выполнены одновременно, что могут быть добавлены другие этапы или что описанные в данном документе определенные этапы могут быть исключены. Другими словами, описания систем и/или процессов в данном документе приведены в целях иллюстрации конкретных вариантов осуществления и никоим образом не должны истолковываться как ограничивающие раскрытый объект изобретения.
[0084] Раскрытие было описано иллюстративным образом, и следует понимать, что использованная терминология предназначена в силу характера для описания, а не для ограничения. Возможны многочисленные модификации и вариации данного раскрытия в свете вышеуказанных сведений, и раскрытие может быть воплощено на практике иным образом, чем то, что конкретно описано.
Узел блока цилиндров (варианты)
Способ эксплуатации двигателя (варианты)
Способ восстановления устройства последующей очистки выхлопных газов (варианты) и система двигателя
Блок цилиндров (варианты)
Способ управления транспортным средством, способ управления двигателем (варианты)
Способ управления двигателем (варианты) и система двигателя
Способ работы двигателя, способ для двигателя и система двигателя
Транспортное средство с управляемым впрыском топлива
Способ останова транспортного средства (варианты) и система останова транспортного средства
Система для головки блока цилиндров, узел индивидуальной катушки на свече зажигания для двигателя внутреннего сгорания и система двигателя
Транспортное средство с качанием фар
Анализ выхлопного газа
Система и способ (варианты) для извлечения воды из механической системы кондиционирования воздуха для впрыска воды для транспортного средства
Система hvac с основанным на времени поездки управлением
Точность определения местоположения транспортного средства
Способ управления двигателем (варианты) и система автомобиля
Способ (варианты) и система расположения перезаряжаемых датчиков контроля давления в шинах
Способ и система для регулирования впрыска воды
Соединительный узел (варианты)
Транспортное средство (варианты) и способ управления режимами местности для транспортного средства (варианты)

