Результат интеллектуальной деятельности: ТОЧНОСТЬ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
Аспекты раскрытия относятся к улучшению точности определения местоположения транспортного средства в условиях слабого сигнала для основанных на спутниках систем определения местоположения (например, GPS) / приема GPS с вспомогательными средствами (aGPS).
УРОВЕНЬ ТЕХНИКИ
Автомобильные транспортные средства обычно оборудованы многочисленными считывающими устройствами для считывания динамического перемещения транспортного средства и формирования выходных сигналов, указывающих считанное перемещение. Считанные выходные сигналы динамики транспортного средства типично сделаны доступными у различных бортовых систем управления транспортного средства, чтобы дополнительно улучшать ходовые характеристики транспортного средства. Передовые системы управления динамикой транспортного средства, в том числе, системы управления активной подвеской, регулирования тягового усилия и управления тормозами часто применяют считанную информацию о динамике транспортного средства, такую как угол крена, угол продольного наклона, угловая скорость рыскания, скорость крена, скорость изменения продольного наклона, поперечная и продольная скорость, поперечное и продольное ускорение, пробуксовка шин, частота пробуксовки шин и другие считанные параметры транспортного средства. При условии многообразия считанных измерений динамики транспортного средства, системы управления динамикой транспортного средства способны адаптивно настраивать езду транспортного средства, к примеру, обеспечивая улучшенное регулирование наклона транспортного средства.
В городских зонах с очень высокой скученностью или внутри здания, такого как крытая автостоянка, транспортное средство, оборудованное GPS или GPS с вспомогательными средствами, может не быть способным определять свое местоположение точно вследствие потери сигнала GPS. Например, водитель может отправляться с места стоянки в крытом гараже и быть не способным идентифицировать, следует ли поворачивать налево или направо. Однако, когда водитель рассчитывает на навигационную систему транспортного средства ради указаний, навигационная система может принимать недостаточный сигнал GPS для определения местоположения транспортного средства.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Предлагается система содержащая модуль основанной на спутниках системы определения местоположения, выполненный с возможностью выдавать данные спутникового определения местоположения; компас, выполненный с возможностью выдавать данные компаса; система управления устойчивостью, выполненная с возможностью выдавать данные управления устойчивостью; и контроллер, выполненный с возможностью поддерживать последнее известное местоположение транспортного средства и, когда данные спутникового определения местоположения недоступны из модуля основанной на спутниках системы определения местоположения, использовать данные компаса и данные управления устойчивостью для оценки текущего местоположения транспортного средства по последнему известному местоположению транспортного средства. Причем контроллер дополнительно выполнен с возможностью поддерживать, между циклами включения транспортного средства, флажковый признак доступности спутникового определения местоположения, указывающий, являются ли данные спутникового определения местоположения недоступными. Причем контроллер дополнительно выполнен с возможностью избегать использования данных компаса для оценки текущего местоположения транспортного средства, когда транспортное средство ускоряется или замедляется в восточном или западном направлениях. Причем контроллер дополнительно выполнен с возможностью идентифицировать направления, которые находятся в пределах предопределенного количества градусов от точно востока или запада, в качестве восточного или западного направлений. Причем предопределенное количество градусов имеет значение +/- 45 градусов. Причем контроллер дополнительно выполнен с возможностью: оценивать текущее местоположение транспортного средства с использованием направления, определенного согласно данным с датчика рулевого управления, когда данные с датчика рулевого управления доступны; и оценивать текущее местоположение транспортного средства с использованием направления, определенного согласно предыдущему направлению, когда данные с датчика рулевого управления недоступны.
Также предлагается реализуемый компьютером способ, состоящий в том, что когда данные основанной на спутниках системы определения местоположения доступны из модуля спутникового определения местоположения, идентифицируют текущее местоположение транспортного средства с помощью модуля спутникового определения местоположения; и иначе, определяют текущее местоположение транспортного средства на основании последнего известного местоположения транспортного средства, направления компаса из компаса и данных управления устойчивостью из системы управления устойчивостью, из условия чтобы в направление компаса вносилась поправка согласно переднему ускорению и уклону, идентифицированному по данным управления устойчивостью. Причем способ дополнительно состоит в том, что используют данные измерителя продольных ускорений и дифференциальную скорость вращения колес для определения уклона; рассчитывают пройденное вперед расстояние согласно уклону; и выводят указание текущего местоположения транспортного средства согласно пройденному вперед расстоянию. Также способ дополнительно состоит в том, что оценивают текущее местоположение транспортного средства частично на основании направления, определенного с использованием данных с датчика рулевого управления. Также способ дополнительно состоит в том, что обновляют последнее известное местоположение транспортного средства согласно текущему местоположению транспортного средства. Также способ дополнительно состоит в том, что поддерживают, между циклами включения транспортного средства, флажковый признак доступности спутникового определения местоположения, указывающий, недоступны ли данные основанной на спутниках системы определения местоположения из модуля спутникового определения местоположения.
Также предлагается транспортное средство, содержащее контроллер, выполненный с возможностью вычислять множество оценок текущего местоположения транспортного средства, каждая оценка выполняется с использованием иного подхода основанной не на спутниках системы определения местоположения; идентифицировать подмножество из множества оценок текущих местоположений на основании непротиворечивости одних относительно других; и усреднять подмножество из множества оценок для вычисления общего текущего местоположения транспортного средства. Причем контроллер дополнительно выполнен с возможностью определять одну из множества оценок текущего местоположения на основании последнего известного местоположения транспортного средства, направления компаса из компаса и данных управления устойчивостью из системы управления устойчивостью, из условия чтобы в направление компаса вносилась поправка согласно переднему ускорению и уклону, идентифицированным по данным управления устойчивостью. Причем контроллер дополнительно выполнен с возможностью определять одну из множества оценок текущего местоположения на основании данных изображения, принятых из системы транспортного средства. Причем контроллер дополнительно выполнен с возможностью определять одну из множества оценок текущего местоположения на основании предыдущего направления транспортного средства и измерения расстояния, определенного по данным датчика колеса. Причем контроллер дополнительно выполнен с возможностью избегать использования данных компаса для оценки текущего местоположения, когда транспортное средство ускоряется или замедляется в восточном или западном направлениях. Причем контроллер дополнительно выполнен с возможностью идентифицировать направления, которые находятся в пределах предопределенного количества градусов от точно восточного или западного, в качестве восточного или западного направлений. Причем предопределенное количество градусов имеет значение +/- 45 градусов. Причем контроллер дополнительно выполнен с возможностью определять одну из множества оценок текущего местоположения посредством оценки текущего местоположения с использованием направления, определенного согласно данным с датчика рулевого управления, когда данные с датчика рулевого управления доступны; и оценивать текущее местоположение с использованием направления, определенного согласно предыдущему направлению, когда данных с датчика рулевого управления недоступны.
В первом иллюстративном варианте осуществления, система включает в себя модуль основанной на спутниках системы определения местоположения, выполненный с возможностью выдавать данные спутникового определения местоположения; компас, выполненный с возможностью выдавать данные компаса; система управления устойчивостью, выполненная с возможностью выдавать данные управления устойчивостью; и контроллер, выполненный с возможностью поддерживать последнее известное местоположение транспортного средства и, когда данные спутникового определения местоположения недоступны из модуля основанной на спутниках системы определения местоположения, использовать данные компаса и данные управления устойчивостью для оценки текущего местоположения транспортного средства по последнему известному местоположению транспортного средства.
Во втором иллюстративном варианте осуществления, реализуемый компьютером способ включает в себя, когда данные основанной на спутниках системы определения местоположения доступны из модуля спутникового определения местоположения, идентификацию текущего местоположения транспортного средства с помощью модуля спутникового определения местоположения; и иначе, определение текущего местоположения транспортного средства на основании последнего известного местоположения транспортного средства, направления компаса из компаса и данных управления устойчивостью из системы управления устойчивостью, из условия чтобы в направление компаса вносилась поправка согласно переднему ускорению и уклону, идентифицированному по данным управления устойчивостью.
В третьем иллюстративном варианте осуществления, транспортное средство включает в себя контроллер, выполненный с возможностью вычислять множество оценок текущего местоположения транспортного средства, каждая оценка выполняется с использованием иного подхода основанной не на спутниках системы определения местоположения; идентифицировать подмножество из множества оценок текущих местоположений на основании непротиворечивости одних относительно других; и усреднять подмножество из множества оценок для вычисления общего текущего местоположения транспортного средства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
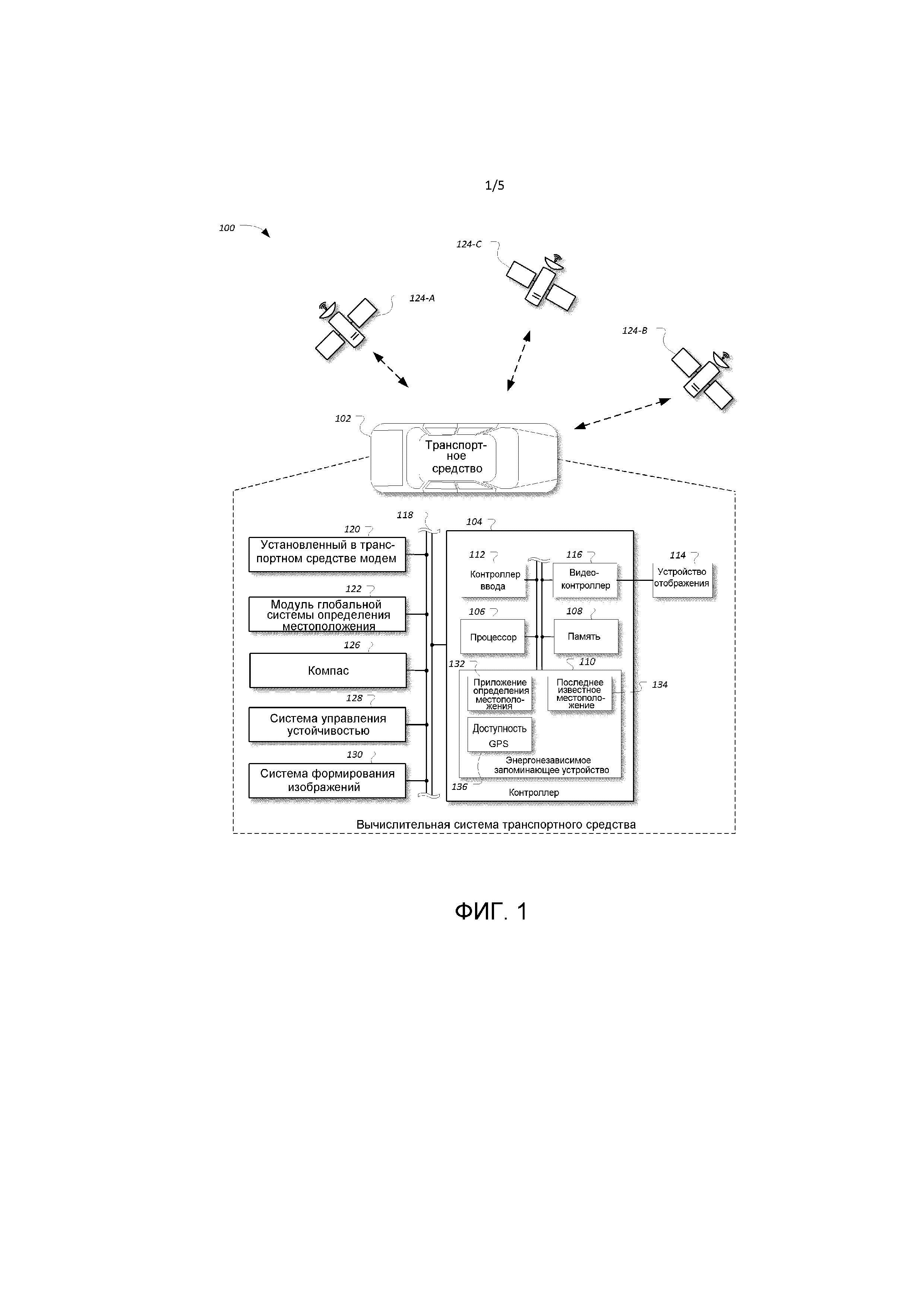
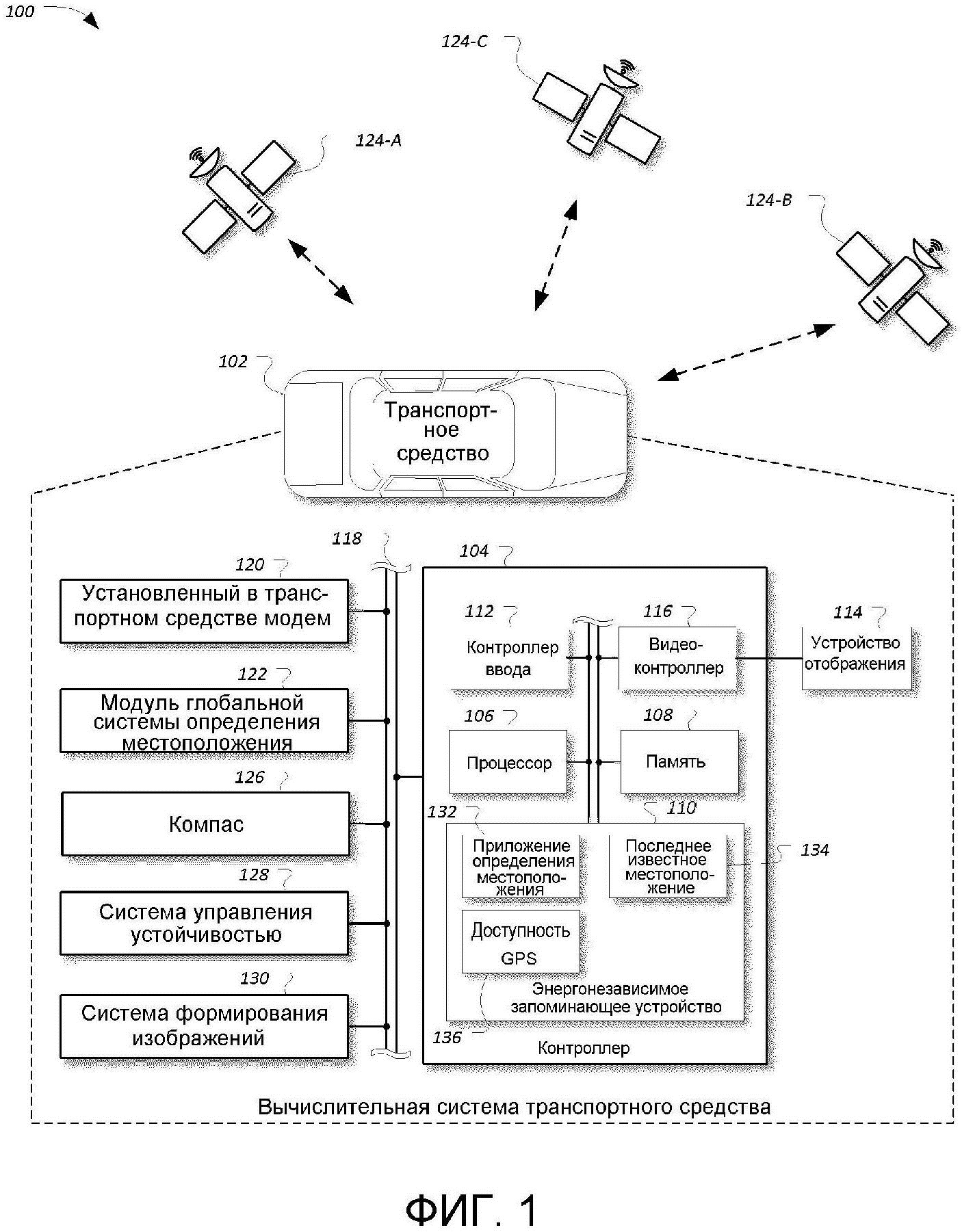
Фиг. 1 иллюстрирует примерную схему системы, выполненной с возможностью предоставлять основанные на местоположении услуги транспортному средству;
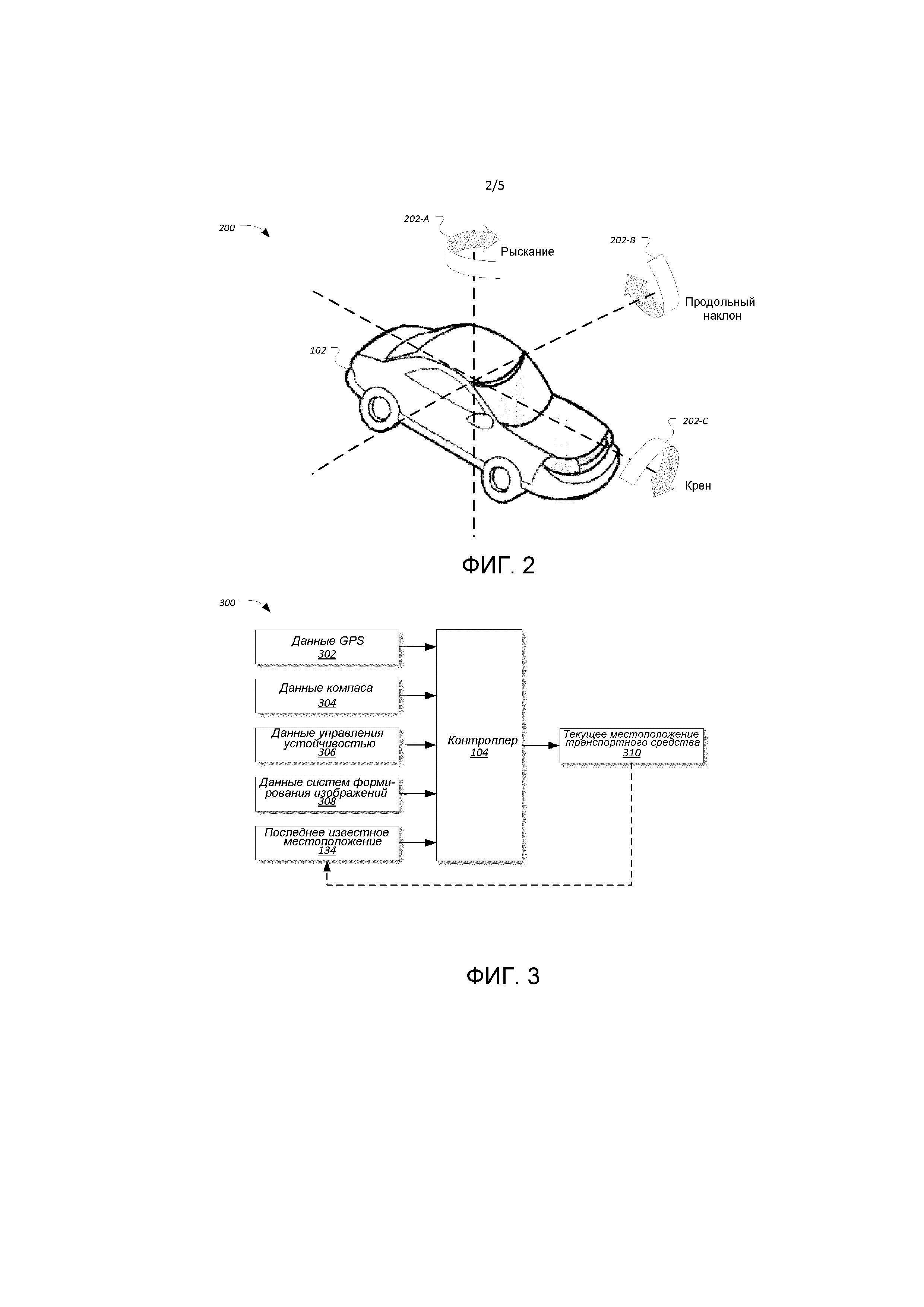
фиг. 2 иллюстрирует пример данных с датчиков транспортного средства по управлению устойчивостью для транспортного средства;
фиг. 3 иллюстрирует примерную схему потоков данных для определения текущего местоположения транспортного средства с использованием данных с датчиков транспортного средства;
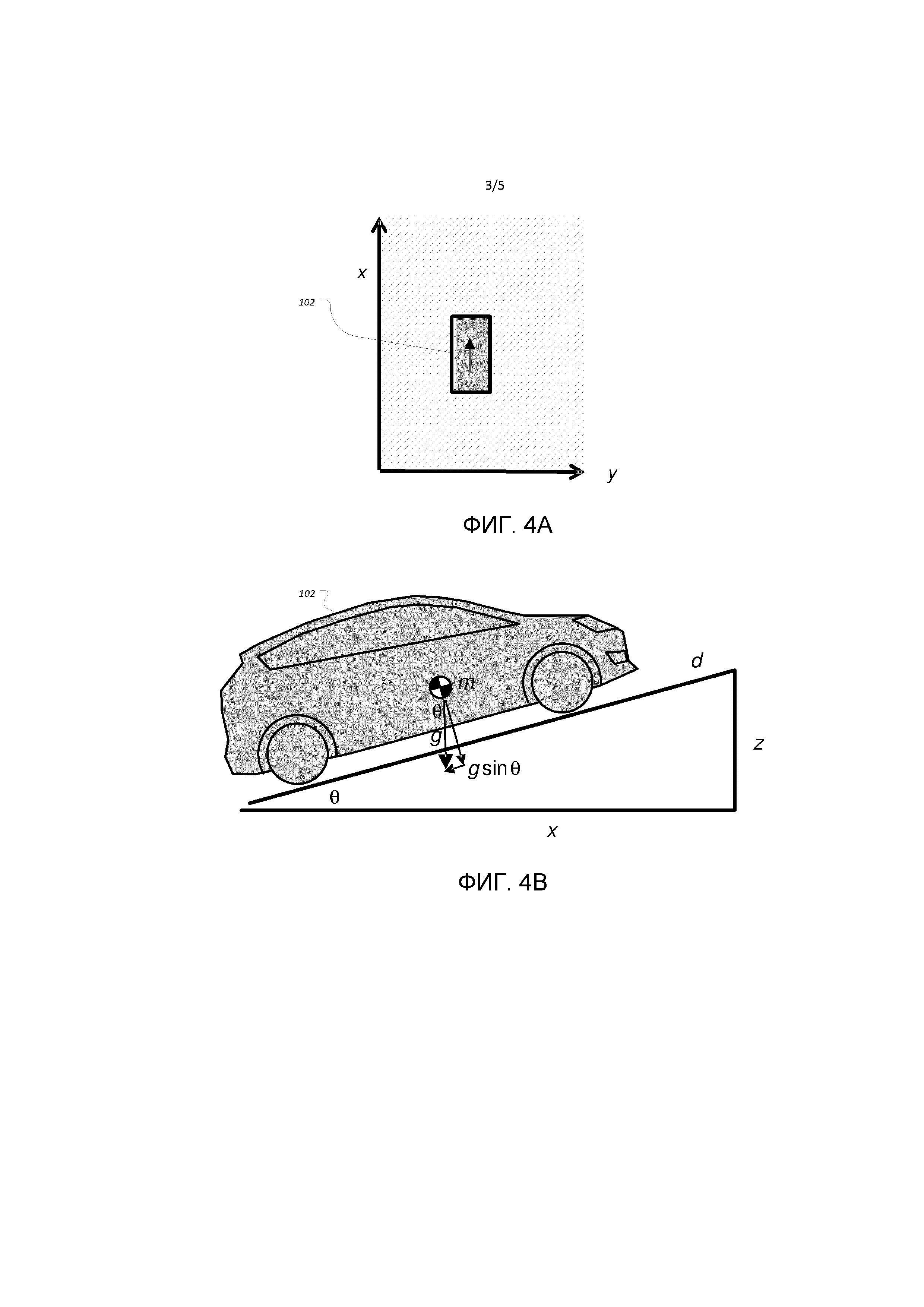
фиг. 4A иллюстрирует примерный вид сверху транспортного средства, едущего по наклонной плоскости;
фиг. 4B иллюстрирует примерный вид сбоку транспортного средства, едущего по наклонной плоскости;
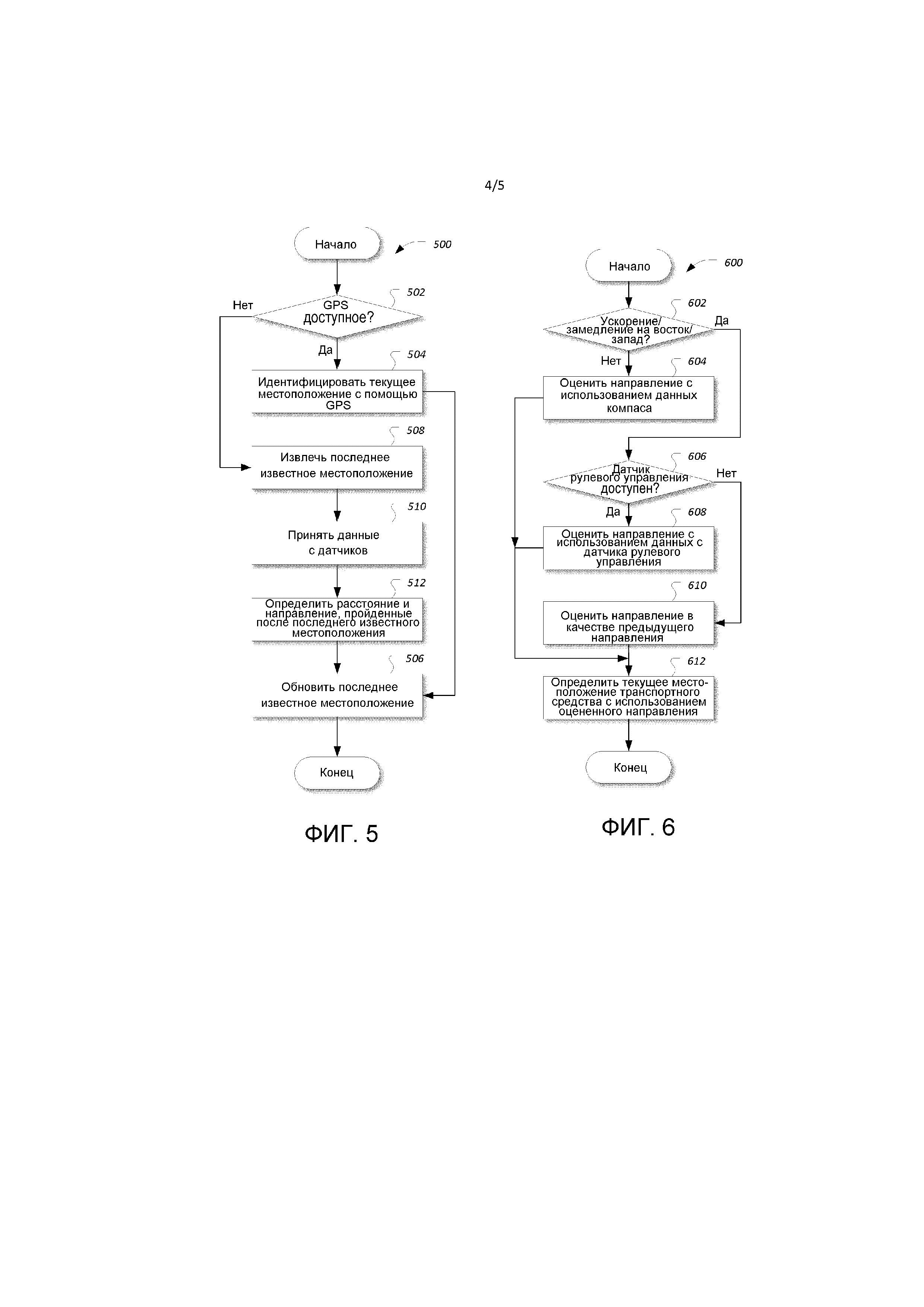
фиг. 5 иллюстрирует примерную последовательность операций для использования данных GPS или с других датчиков для обновления последнего известного местоположения;
фиг. 6 иллюстрирует примерную последовательность операций для определения текущего местоположения транспортного средства с использованием данных компаса и данных управления устойчивостью;
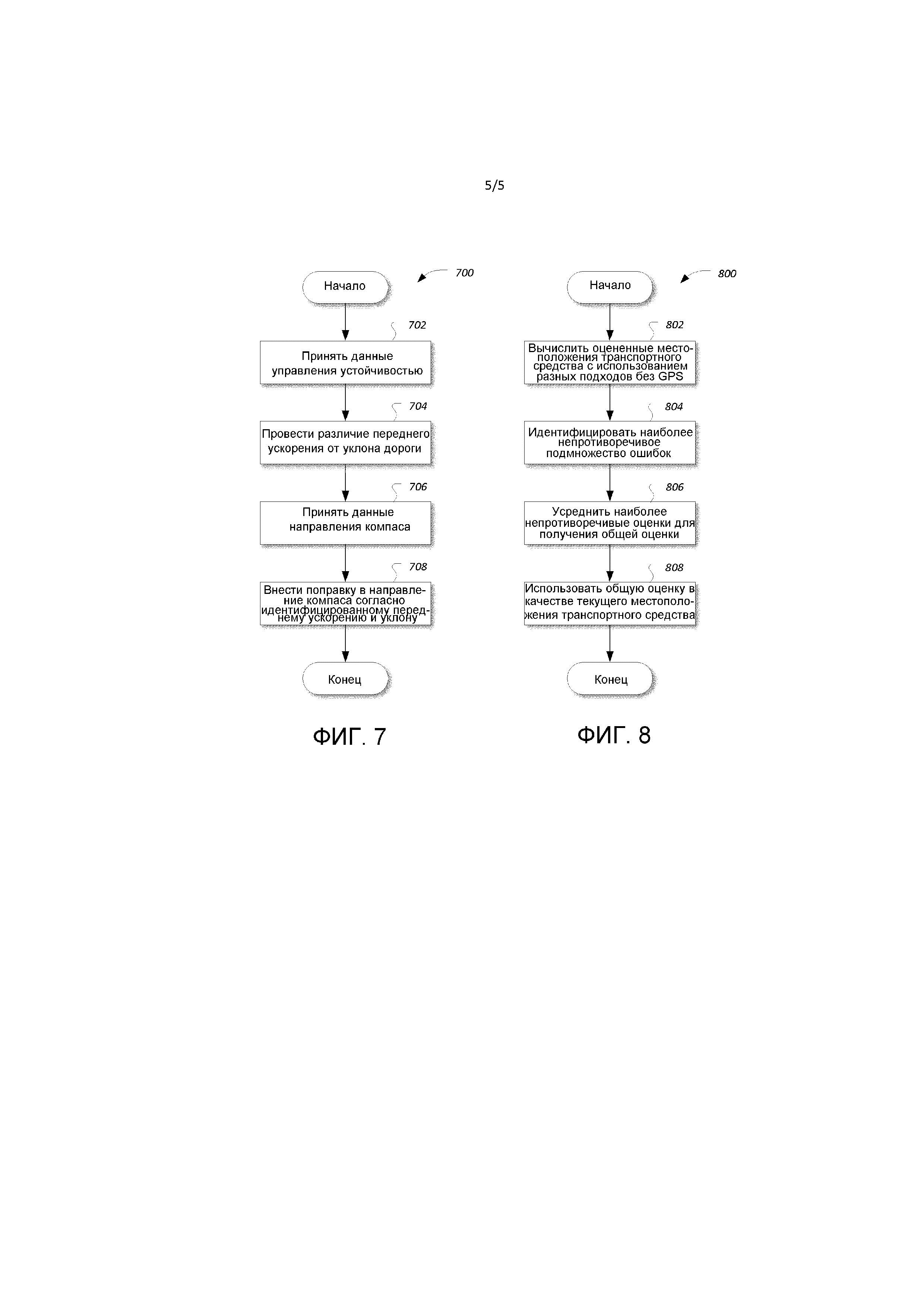
фиг. 7 иллюстрирует примерную последовательность операций для использования данных системы управления устойчивостью для внесения поправки в данные компаса при обновлении последнего известного местоположения; и
фиг. 8 иллюстрирует примерную последовательность операций для использования многочисленных оценок не из GPS текущего местоположения транспортного средства, чтобы определять общее текущее местоположение транспортного средства не из GPS.
ПОДРОБНОЕ ОПИСАНИЕ
Как требуется, в материалах настоящей заявки раскрыты детализированные варианты осуществления настоящего изобретения; однако, должно быть понятно, что раскрытые варианты осуществления являются всего лишь примером изобретения, которое может быть воплощено в различных и альтернативных формах. Фигуры не обязательно должны определять масштаб; некоторые признаки могут быть преувеличены или сведены к минимуму, чтобы показать подробности конкретных компонентов. Поэтому, специфичные конструктивные и функциональные детали, раскрытые в материалах настоящей заявки, не должны интерпретироваться в качестве ограничивающих, а только качестве представляющих основу для изучения специалистом в данной области техники для различного применения настоящего изобретения.
Навигационные системы транспортного средства могут быть зависящими от данных GPS или aGPS для идентификации текущего местоположения транспортного средства. Однако, когда данные GPS недоступны или слишком неточны, транспортное средство может использовать различные типы входных сигналов датчиков не из GPS для отслеживания транспортного средства.
Например, сигналы находящегося в транспортном средстве компаса могут использоваться для приближенного определения местоположения транспортного средства и направления транспортного средства. В таком подходе, текущее местоположение транспортного средства может оцениваться согласно последнему известному положению транспортного средства, скорости транспортного средства и направления транспортного средства. Такие подходы могут полагаться на направление компаса, которое может становиться менее точным во время ускорения и замедления при движении на восток или запад. В качестве еще одной возможности, одноосные или многоосные гироскопы могут быть добавлены на транспортное средство, чтобы приблизительно определять местоположение и направление транспортного средства в комбинации со скоростью транспортного средства. Однако, такие подходы могут быть неточными и могут требовать включения в состав дополнительного оборудования транспортного средства.
В еще одном примере, транспортное средство может быть выполнено с возможностью использовать технологии распознавания зрительных образов для отслеживания изменений расстояния и направления от последнего местоположения GPS. В качестве дополнительного примера, транспортное средство может использовать сигналы системы управления устойчивостью, такие как рыскание, крен и продольный наклон, для улучшения точности во время склонов, поворотов или других перемещений, а также для внесения поправки в или пренебрежения показаниями компаса, чтобы компенсировать ложные отклонения при ускорении или замедлении в западном или восточном направлении. В таком же дополнительном примере, транспортное средство может использовать датчик угла поворота управляемых колес и датчик скорости транспортного средства для определения направления и местоположения.
В некоторых случаях, транспортное средство может быть выполнено с возможностью определять текущее местоположение, комбинируя многочисленные подходы к определению местоположения транспортного средства с использованием входных сигналов датчиков не из GPS. Например, транспортное средство может быть выполнено с возможностью сравнивать расчеты местоположения, использующие визуальные указания, данные компаса и данные скорости и угла поворота управляемых колес транспортного средства, определять два способа, которые совпадают в наибольшей степени, и использовать среднее значение этих двух способов в качестве нового текущего местоположения транспортного средства. Таким образом, многие из этих подходов могут использоваться, когда первичных данных GPS недостаточно.
Транспортное средство также может поддерживать информацию о состоянии доступности GPS, когда поставлено на стоянку (например, что нет обнаруживаемого сигнала GPS при стоянке на крытой автостоянке), значит, когда транспортное средство повторно запущено, оно может быть способно быстрее идентифицировать, требуются ли альтернативные подходы для выявления местоположения транспортного средства. Должно быть отмечено, что примеры в материалах настоящей заявки упоминают системы GPS, но должно быть отмечено, что описанные технологии применимы к другим основанным на спутниках системам определения местоположения, таким как Глобальная навигационная спутниковая система GLONASS и Глобальная навигационная спутниковая система Galileo (GNSS), в качестве некоторых других возможностей. Дополнительные аспекты раскрытия подробно описаны ниже.
Фиг. 1 иллюстрирует примерную схему системы 100, выполненной с возможностью предоставлять основанные на местоположении услуги транспортному средству 102. Транспортное средство 102 может включать в себя различные типы пассажирского транспортного средства, таких как внедорожный автомобиль (CUV), автомобиль для активного отдыха (SUV), грузовой автомобиль, жилой автофургон (RV), судно, самолет или другая самоходная машина для транспортировки людей или товаров. Основанные на местоположении услуги могут включать в себя телематические услуги, такие как навигация, указания поворота за поворотом и сводки погоды, или нетелематические услуги, такие как содействие парковке или выявление столкновений. Должно быть отмечено, что проиллюстрированная система 100 является всего лишь примером, и могут использоваться большее количество, меньшее количество и/или по-другому расположенные элементы.
Контроллер 104 может включать в себя один или более процессоров 106, выполненных с возможностью выполнять инструкции, команды и другие процедуры при поддержке последовательностей операций, описанных в материалах настоящей заявки. Например, контроллер 104 может быть выполнен с возможностью выполнять инструкции приложений транспортного средства, загруженные в память 108, чтобы обеспечивать признаки, такие как навигация, указания поворот за поворотом и содействие парковке. Такие инструкции и другие данные могут сохраняться энергонезависимым образом с использованием многообразия типов машинно-читаемого запоминающего носителя 110. Машинно-читаемый носитель 110 (также указываемый ссылкой как читаемый процессором носитель 210 или запоминающее устройство) включает в себя любой не эфемерный носитель (например, реальный носитель) носитель, который участвует в предоставлении инструкций или других данных, которые могут считываться процессором 106 контроллера 104. Машинно-исполняемые инструкции могут компилироваться или интерпретироваться из компьютерных программ, созданных с использованием многообразия языков и/или технологий программирования, в том числе, но не в качестве ограничения, и в одиночку или в комбинации, Java, C, C++, C#, Objective C, Fortran, Pascal, Java Script, Python, Perl и PL/SQL.
Контроллер 104 может быть снабжена различными признаками, предоставляющими пассажирам или водителю транспортного средства возможность взаимодействовать с контроллером 104. Например, контроллер 104 может включать в себя контроллер 112 ввода, выполненный с возможностью принимать пользовательский ввод с одного или более элементов управления человеко-машинного интерфейса (HMI) транспортного средства 102, предусматривая взаимодействие пассажира или водителя с транспортным средством 102. Таковые могут включать в себя одну или более кнопок или другие элементы управления HMI, выполненные с возможностью вызывать функции на контроллере 104 (например, звуковыми кнопками на рулевом колесе, кнопкой включения микрофона, элементами управления приборной панели, и т. д.). Контроллер 104 также может приводить в действие или иным образом поддерживать связь с одним или более устройствами 114 отображения, выполненными с возможностью выдавать визуальный вывод пассажирам или водителю транспортного средства через видеоконтроллер 116. В некоторых случаях, устройство 114 отображения может быть сенсорным экраном, дополнительно выполненным с возможностью принимать сенсорный ввод пользователя через видеоконтроллер 116, наряду с тем, что, в других случаях, устройство 114 отображения может быть только дисплеем без возможностей сенсорного ввода.
Контроллер 104 дополнительно может быть выполнен с возможностью поддерживать связь с другими компонентами транспортного средства 102 через одну или более установленных в транспортном средстве шин 118. Установленные в транспортном средстве шины 12 могут включать в себя одну или более из локальной сети контроллеров (CAN) транспортного средства, сети Ethernet и бортовой оптоволоконной автомобильной шины (MOST), в качестве некоторых примеров. Установленные в транспортном средстве шины 118 могут предоставлять контроллеру 104 возможность поддерживать связь с другими системами транспортного средства 102. Как показано, системы транспортного средства, подробно описанные ниже, могут поддерживать связь с контроллером 104 по установленной в транспортном средстве шине 118. В других примерах, контроллер 104 может быть присоединен к большему или меньшему количеству установленных в транспортном средстве шин 118. Например, звуковой модуль и элементы управления HMI могут поддерживать связь с контроллером 104 через еще одну установленную в транспортном средстве шину, отдельную от проиллюстрированной шины 118 транспортного средства. Дополнительно или в качестве альтернативы, один или более элементов управления HMI или других компонентов могут быть присоединены к контроллеру 104 через иные установленные в транспортном средстве шины 118, нежели показанные, или непосредственно, без присоединения к установленной в транспортном средстве шине 118.
Транспортное средство 102 может включать в себя установленный в транспортном средстве модем 120 (который может не присутствовать в некоторых конфигурациях). Если оборудован таким образом, контроллер 104 может использовать установленный в транспортном средстве модем 120 для осуществления доступа к услугам связи сети связи (не показана), таким как службы сети с коммутацией пакетов (например, доступа к сети Интернет, услугам связи с передачей голоса по протоколу сети Интернет (VoIP)), доступные устройствам, присоединенным к сети связи. Для содействия связи по сети связи, установленный в транспортном средстве модем 120 может быть ассоциативно связан с уникальными идентификаторами устройств (например, номерами мобильных устройств (MDN), адресами протокола сети Интернет (IP), и т. д.), чтобы идентифицировать связь установленного в транспортном средстве модема 120 по сети 156 связи.
Транспортное средство 102 также может включать в себя модуль 122 глобальной системы определения местоположения (GPS), выполненный с возможностью выдавать информацию о текущем местоположении и направлении транспортного средства 102. Для действия таким образом, модуль 122 GPS может принимать данные спутникового определения местоположения, а также данные о синхронизации циклов, передаваемые с многочисленных спутников 124 GPS (только три спутника 124-A, 124-B и 124-C GPS показаны для простоты, но система GPS типично включала бы в себя много больше). С использованием спутниковых данных, модуль 122 GPS может точно измерять расстояние от выбранных из спутников GPS до антенны модуля 122 GPS, а потому, может вычислять положение, скорость и временные параметры координатного модуля GPS с высокой степенью точности с использованием технологий триангуляции.
Транспортное средство 102 также может включать в себя компас 126. Компас 126 может включать в себя схему с магниторезистивным датчиком, имеющую множество датчиков магнитного поля. В примере, каждый датчик может быть выровнен по оси и выполнен с возможностью преобразовывать падающие магнитные поля в осевом направлении в дифференциальный выходной сигнал напряжения. Например, магниторезистивные датчики могут включать в себя железоникелевую тонкую пленку, структурированную в качестве резистивного полоскового элемента, из условия чтобы, в присутствии магнитного поля, изменение резистивных элементов мостовой схемы вызывало соответствующее изменение напряжения на выходах мостовой схемы.
Транспортное средство 102 также может включать в себя систему 128 управления устойчивостью. Система 128 управления устойчивостью может включать в себя датчики, выполненные с возможностью анализировать силы, взаимодействующие с транспортным средством 120, чтобы идентифицировать возможное переворачивание или условия неустойчивости транспортного средства 102. В качестве некоторых возможных датчиков, система 128 управления устойчивостью может включать в себя датчик угловой скорости рыскания, датчик скорости, датчик поперечного ускорения, датчик вертикального ускорения, датчик угловой скорости крена, датчик руля (рулевого колеса в транспортном средстве 102), датчик продольного ускорения, датчик скорости продольного наклона, датчик углового положения (угла поворота управляемых колес) управляемых колес (колес или исполнительного механизма) и датчик положения (высоты) подвески. Фиг. 2 иллюстрирует пример 200 данных с датчиков транспортного средства, выдаваемых системой 128 управления устойчивостью. Как показано, система 128 управления устойчивостью может выдавать данные 202-A рыскания с датчика угловой скорости рыскания, данные 202-B продольного наклона с датчика скорости продольного наклона и данные 202-C крена с датчика угловой скорости крена. Должно быть отмечено, что таковые являются всего лишь примерами, и могут использоваться различные комбинации и подкомбинации датчиков.
Возвращаясь на фиг. 1, транспортное средство 102 также может включать в себя различные системы 130 формирования изображений. Системы 130 формирования изображений могут быть выполнены с возможностью предоставлять транспортному средству 102 возможность получать информацию касательно препятствий, движущихся объектов или других аспектов окружающей среды, окружающей транспортное средство 102. В качестве примера, системы 130 формирования изображений могут включать в себя установленную спереди камеру (например, за передней облицовкой радиатора транспортного средства 102, внутри транспортного средства 102 в верхней части переднего ветрового стекла, обращенную вперед, на багажнике на крыше, обращенную вперед, и т. д.), выполненную с возможностью захватывать изображение или видео перед транспортным средством 102, и установленную сзади камеру (например, над номерным знаком, на задней части крышки багажника, включенную в задний бампер, внутри транспортного средства, обращенную за заднее ветровое стекло, и т. д.), выполненную с возможностью захватывать изображение или видео позади транспортного средства 102. В качестве еще одного примера, системы 130 формирования изображений могут включать в себя датчики с радиолокатором или лазерным локатором, включенные в наружную область транспортного средства 102 и выполненные с возможностью выявлять приближающиеся объекты или близость объектов по мере того, как транспортное средство 102 движется. Должно быть отмечено, что эти системы 130 формирования изображений являются всего лишь примерными, и большее количество, меньшее количество и/или иначе расположенные системы 130 формирования изображений могут использоваться в других примерах.
Точность информации, принятой из модуля 122 GPS, может зависеть от качества доступных сигналов спутников GPS. Таким образом, в некоторых случаях, таких как на крытой автостоянке, или где здания или ландшафт заслоняют обзор модуля 122 GPS от неба, сигналы спутников GPS могут быть недостаточны для точного определения местоположения транспортного средства 102.
Приложение 132 определения местоположения может быть установлено в контроллер 104 и использоваться для предоставления транспортному средству 102 возможности поддерживать последнее известное местоположение 134 транспортного средства 102. Когда GPS доступна, приложение 132 определения местоположения может быть выполнено с возможностью использовать модуль 122 GPS для определения текущего местоположения транспортного средства. Приложение 132 определения местоположения может использовать определенное местоположение в качестве последнего известного местоположения 134 и может сохранять последнее известное местоположение 134 в энергонезависимой области памяти контроллера 104, такой как запоминающее устройство 110. Последнее известное местоположение 134 дополнительно может поддерживаться в запоминающем устройстве 110 после выключения транспортного средства 102, чтобы иметься в распоряжении у транспортного средства 102 после включения транспортного средства 102 без вынуждения повторно вычисляться. Это может быть полезно при определении местоположения транспортного средства 102, когда сначала попадают в транспортное средство 102, так как получение сигналов GPS может требовать порядка тридцати секунд, и в течение такого времени без последнего известного местоположения 134, контроллер 104 может быть не способен предоставлять информацию о местоположении или основанные на местоположении услуги.
Приложение 132 определения местоположения также может быть выполнено с возможностью устанавливать флажковый признак 136 доступности GPS (например, хранимый в запоминающем устройстве 110), указывающий, доступна ли GPS. Посредством поддержания флажкового признака 136 доступности GPS между циклами включения транспортного средства, транспортное средство 102 может быть способно без задержки определять, должна ли информация, иная чем GPS, использоваться для определения текущего местоположения, без вынуждения пытаться связаться со спутниками 124 GPS.
Фиг. 3 иллюстрирует примерную схему 300 потоков данных для определения текущего местоположения 310 транспортного средства с использованием данных с датчиков транспортного средства. Как показано, контроллер 104 может принимать данные 302 GPS из модуля 122 GPS, данные 304 компаса из компаса 126, данные 306 управления устойчивостью из системы 128 управления устойчивостью, данные 308 систем формирования изображений из систем 130 формирования изображений и последнее известное местоположение 134 из запоминающего устройства 110. С использованием принятой информации, контроллер 104 может вычислять текущее местоположение 310 транспортного средства. Контроллер 104 затем может обновлять последнее известное местоположение 134 с использованием определенного текущего местоположения 310 транспортного средства.
Данные 302 GPS могут включать в себя информацию, указывающую одно или более из: того, были ли установлены данные из спутников 124 GPS, мощности сигнала GPS, текущих широты и долготы транспортного средства, текущего времени и предела погрешности для определения местоположения GPS. Данные 304 компаса могут включать в себя информацию, указывающую магнитный курс транспортного средства 102. Данные 306 управления устойчивостью могут включать в себя информацию, указывающую одно или более из: угловой скорости рыскания, скорости транспортного средства, поперечного ускорения транспортного средства 102, вертикального ускорения транспортного средства 102, угловой скорости крена транспортного средства 102, положения руля транспортного средства 102, продольного ускорения транспортного средства 102, скорости продольного наклона транспортного средства 102, действующего угла поворота управляемых колес транспортного средства 102 и положения подвески транспортного средства 102. Данные 308 систем формирования изображений могут включать в себя необработанные и/или обработанные данные изображений, указывающие близость транспортного средства 102 к объектам.
Когда GPS доступна, приложение 132 определения местоположения может быть выполнено с возможностью полагаться на данные 302 GPS. Когда GPS недоступна, приложение 132 определения местоположения может быть выполнено с возможностью использовать информацию, иную чем данные 302 GPS, для определения текущего местоположения 310 транспортного средства. Как правило, приложение 132 определения местоположения может быть выполнено с возможностью использовать одно или более из данных 304 компаса, данных 306 управления устойчивостью, данных 308 систем формирования изображений и последнего известного местоположения 134 для определения текущего местоположения 310 транспортного средства.
В первом примере, когда приложение 132 определения местоположения идентифицирует по данным 302 GPS, что сигнала GPS нет в распоряжении, приложение 132 определения местоположения может быть выполнено с возможностью использовать изображения из данных 308 систем формирования изображений для визуального отслеживания изменений расстояния и направления от последнего известного местоположения 134.
Во втором примере, когда приложение 132 определения местоположения идентифицирует, что сигнал GPS недоступен, когда транспортное средство 102 включено (например, с использованием флажкового признака 136 доступности GPS), к примеру, когда транспортное средство 102 поставлено на стоянку на крытой автостоянке, приложение 132 определения местоположения может использовать данные 308 систем формирования изображений для визуального отслеживания изменений расстояния и направления, но дополнительно может дополнительно сравнивать изображения ориентиров или строений с камер, таких как колонны в гараже, из окончания последней поездки для определения, изменило ли транспортное средство 102 местоположение (то есть, перемещалось ли транспортное средство 102, когда камеры систем 130 формирования изображений были выключены или недействующими иным образом).
В третьем примере, когда приложение 132 определения местоположения идентифицирует, что сигнала GPS недоступен, приложение 132 определения местоположения может использовать изображение из данных 308 систем формирования изображений для считывания и идентификации дорожных знаков или других идентифицируемых объектов, которые определяют приблизительное местоположение, чтобы восстанавливать в качестве текущего местоположения 310 транспортного средства. В качестве неограничивающих примеров, эти знаки и другие объекты могут включать в себя: названия городских/пригородных улиц; названия предприятий (например, ресторанов, гостиниц, магазинов); полезные места (например, парки, церкви, больницы); километровые столбы на дорогах; и указатели выезда (например, выезд 58 на Мичиган-Авеню).
В четвертом примере, когда приложение 132 определения местоположения идентифицирует, что сигнала GPS недоступен, приложение 132 определения местоположения может использовать данные 304 компаса для подтверждения и внесения поправки в местоположение транспортного средства 102, но также определения величины ускорения или замедления транспортного средства 102 в восточном или западном направлении с использованием данных 306 управления устойчивостью. С использованием данных 306 управления устойчивостью, приложение 132 определения местоположения может соответствующим образом исправлять ошибки в показаниях компаса 126 во время восточных или западных ускорений (то есть, «явления ANDS» при проводке с навигационным счислением пути, где компас будет показывать ложные отклонения «ускорения на север, замедления на юг»).
В пятом примере, приложение 132 определения местоположения дополнительно может вносить поправку в ускорение/замедления с использованием данных 306 управления устойчивостью на рыскание, крен и продольный наклон, чтобы улучшать точность во время склонов и поворотов, в качестве некоторых возможностей. Как показано на фиг. 4A и 4B, оценивание истинного положения x и y транспортного средства 102 на поверхности может сбивать с толку при движении вверх по склону или вниз по склону. Как проиллюстрировано на фиг. 4A, транспортное средство 102 показывается на виде сверху движущимся в направлении x. Однако, транспортное средство 102 может оценивать расстояние x, пройденное транспортным средством 102, согласно интегралу скорости вращения колес по времени. Как проиллюстрировано на фиг. 4B на виде сбоку транспортного средства 102, выведенное из скорости вращения колес расстояние фактически является гипотенузой пройденного расстояния и изменения высоты, а не истинным расстоянием x. Для определения истинного расстояния x, транспортное средство 102 может сравнивать измеритель продольного ускорения (ax1) с дифференциальной скоростью вращения колес (ax2). Разность информирует транспортное средство, какое значение имеет уклон дороги (также известный под наименованием угла θ спуска/подъема по склону), и из этого, оно может рассчитывать истинное расстояние x=d*cos(θ). Следовательно, когда данные 302 GPS недоступны, транспортное средство 102 может быть способно точно определять положение на плоскости x-y.
В многих случаях, транспортное средство не является движущимся исключительно в направлении x, но в комбинированных направлениях x и y. Тем не менее, вышеупомянутая поправка на высоту как правило может выполняться, из условия чтобы выходной сигнал данных с датчика скорости вращения колеса и данных измерителя ускорений, раскладывался на составляющие x и y с использованием азимутальных (направленных) данных, например, полученных с использованием данных 304 компаса из компаса 126 или других способов, описанных в материалах настоящей заявки. В некоторых случаях, система 128 управления устойчивостью или другая система транспортного средства 102 может включать в себя датчик крена. Выходной сигнал из датчика крена дополнительно может использоваться транспортным средством 102, чтобы подобным образом вносить поправку в данные, когда транспортное средство 102 продолжает движение вокруг поверхностей, таких как куполообразная поверхность. В таком случае, датчики скорости вращения колес могут указывать, что угол рыскания = Y1, но, в реальности, угол рыскания = Y2, в качестве скорректированного по датчику крена.
В шестом примере, приложение 132 определения местоположения может использовать данные угла поворота управляемых колес и скорости транспортного средства из данных 306 управления устойчивостью, чтобы определять направление и местоположение.
В седьмом примере, приложение 132 определения местоположения может комбинировать вышеприведенные примерные решения, чтобы добиваться улучшенных избыточности и точности, определенных не из GPS текущих местоположений 310 транспортного средства. Например, приложение 132 определения местоположения может сравнивать расчеты местоположения из многочисленных вышеупомянутых примерных решений, определять два способа, которые совпадают в наибольшей степени, и обновлять последнее известное местоположение 134 в качестве среднего значения двух в наибольшей степени совпадающих примерных решений. Дополнительные аспекты работы приложения 132 определения местоположения подробно обсуждены со ссылкой на фиг. 4-7, приведенные ниже.
Фиг. 5 иллюстрирует примерную последовательность 500 операций для использования данных GPS или с других датчиков для обновления последнего известного местоположения 134. Последовательность 500 операций может выполняться, в примере, контроллером 104, выполняющим приложение 132 определения местоположения.
На операции 502, контроллер 104 определяет, доступна ли GPS. В примере, приложение 132 определения местоположения может проверять флажковый признак 136 доступности GPS, чтобы определять, доступна ли GPS на данный момент. В еще одном примере, приложение 132 определения местоположения может запрашивать модуль 122 GPS, чтобы определял текущее состояние соединения GPS. В ответ на запрос, контроллер 104 может принимать информацию о состоянии, указывающую, является ли транспортное средство 102 принимающим информацию GPS на данный момент, и может обновлять флажковый признак 136 доступности GPS. Если GPS доступна, управление переходит на операцию 504. Иначе, управление переходит на операцию 508.
На операции 504, контроллер 104 определяет текущее местоположение 310 транспортного средства с использованием GPS. В примере, приложение 132 определения местоположения может побуждать контроллер 104 принимать текущее местоположение 310 транспортного средства по шине 118 транспортного средства из модуля 122 GPS.
На операции 506, контроллер 104 обновляет последнее известное местоположение 134 текущим местоположением 310 транспортного средства. В примере, приложение 132 определения местоположения может подтверждать, что текущее местоположение 310 транспортного средства является правдоподобным (например, в пределах предопределенного расстояния от предыдущего местоположения, и т. д.). Если текущее местоположение 310 транспортного средства подтверждено, приложение 132 определения местоположения может сохранять текущее местоположение 310 транспортного средства в качестве нового последнего известного местоположения 134. После операции 506, последовательность 500 операций заканчивается.
На операции 508, контроллер 104 извлекает последнее известное местоположение 134. В примере, приложение 132 определения местоположения может извлекать последнее известное местоположение 134 из энергонезависимого запоминающего устройства контроллера 104, к примеру, из запоминающего устройства 110. Последнее известное местоположение 134 может использоваться приложением 132 определения местоположения в качестве основы для оценивания нового текущего местоположения 310 транспортного средства.
На операции 510, контроллер 104 принимает данные с датчиков из источников информации о местоположении, иных чем GPS. В некоторых примерах, приложение 132 определения местоположения может принимать данные 308 систем формирования изображений из систем 130 формирования изображений, данные 304 компаса из компаса 126 и данные 306 управления устойчивостью из системы 128 управления устойчивостью. После операции 510, управление переходит на операцию 512.
На операции 512, контроллер 104 определяет расстояние расстояние и направление, пройденные после последнего известного местоположения 134. Примерные подробности определения изменения положения после последнего известного местоположения 134 подробно обсуждены ниже со ссылкой на последовательности 400, 500 и 600 операций. После операции 512, управление переходит на операцию 506.
Фиг. 6 иллюстрирует примерную последовательность 600 операций для определения текущего местоположения 310 транспортного средства с использованием данных 304 компаса и данных 306 управления устойчивостью. Как с последовательностью 500 операций, последовательность 600 операций может выполняться, в примере, контроллером 104, выполняющим приложение 132 определения местоположения.
На операции 602, контроллер 104 определяет, является ли транспортное средство 102 ускоряющимся или замедляющимся в восточном или западном направлении. В примере, приложение 132 определения местоположения может использовать данные 304 компаса для определения направления транспортного средства 102, а данные 306 управления устойчивостью для определения, ускоряется ли транспортное средство 102 в восточном или западном направлении. В качестве одной из возможностей, транспортное средство 102 может идентифицировать направления, которые находятся в пределах +/- 45 от точно восточного или западного, в качестве являющихся восточными или западными направлениями. Если контроллер 104 определяет, что транспортное средство 102 не ускоряется и не замедляется в восточном или западном направлении, управление переходит на операции 604. Иначе, управление переходит на операцию 606.
На операции 604, контроллер 104 оценивает направление транспортного средства 102 согласно данным 304 компаса. В примере, приложение 132 определения местоположения может идентифицировать угол магнитного курса по данным 304 компаса в качестве являющегося текущим направлением. После операции 604, управление переходит на операцию 612.
На операции 606, контроллер 104 определяет, доступны ли данные с датчика рулевого управления. В примере, приложение 132 определения местоположения может использовать данные 306 управления устойчивостью для определения, доступны ли данные с датчика рулевого управления для использования при оценке направления. Если так, управление переходит на операцию 608. Иначе, управление переходит на операцию 610.
На операции 608, контроллер 104 оценивает направление транспортного средства 102 согласно данным датчика рулевого управления. В примере, приложение 132 определения местоположения может идентифицировать смещение угла поворота управляемых колес от направления, указанного последним известным местоположением 134, с использованием данных с датчика рулевого управления и может использовать такую информацию для оценивания нового направления. После операции 608, управление переходит на операцию 612.
На операции 610, контроллер 104 оценивает направление транспортного средства 102 в качестве того же самого направления, указанного последним известным местоположением 134. В примере, приложение 132 определения местоположения может использовать существующую информацию о направлении в отсутствие источника информации о направлении, считающегося приложением 132 определения местоположения более надежным, чем определенное ранее направление. После операции 610, управление переходит на операцию 612.
На операции 612, контроллер 104 определяет текущее местоположение 310 транспортного средства с использованием оцененного направления. В примере, приложение 132 определения местоположения может определять пройденное расстояние согласно данным с датчика колеса в данных 306 управления устойчивостью и может определять текущее местоположение 310 транспортного средства в качестве последнего известного местоположения 134 по мере того, как модифицируется идентифицированными пройденным расстоянием и оцененным направлением. После операции 612, последовательность 600 операций заканчивается.
Фиг. 7 иллюстрирует примерную последовательность 700 операций для использования данных системы 128 управления устойчивостью для внесения поправки в данные компаса 126 при обновлении последнего известного местоположения 134. Как с последовательностями 500 и 600 операций, последовательность 700 операций может выполняться, в примере, контроллером 104, выполняющим приложение 132 определения местоположения.
На операции 702, контроллер 104 принимает данные 306 управления устойчивостью. В примере, приложение 132 определения местоположения может принимать данные 306 управления устойчивостью из системы 128 управления устойчивостью через шину 118 транспортного средства.
На операции 704, контроллер 104 проводит различие прямого ускорения транспортного средства 102 от уклона дороги. В примере, приложение 132 определения местоположения может использовать информацию о продольном ускорении (например, как проиллюстрированная на фиг. 2 в качестве данных 202-C крена) и информацию о продольном наклоне (например, как проиллюстрированная на фиг. 2 в качестве данных 202-B продольного наклона) для определения величины переднего ускорения или замедления транспортного средства 102, к тому же, наряду с проведением различия от продольного уклона дороги, который возникает, имея разную комбинацию продольного ускорения и продольного наклона. Дополнительные примеры обсуждены выше со ссылкой на фиг. 4A и 4B.
На операции 706, контроллер 104 принимает данные 304 компаса. В примере, приложение 132 определения местоположения может принимать данные 304 компаса из компаса 126 через шину 118 транспортного средства.
На операции 708, контроллер 104 вносит поправку в данные 304 компаса согласно идентифицированному переднему ускорению и уклону. В примере, если приложение 132 определения местоположения определяет, что данные ускорения обусловлены уклоном дороги, а не разгоном транспортного средства 102, приложение 132 определения местоположения может не выполнять коррекцию данных 304 компаса. В еще одном примере, если приложение 132 определения местоположения определяет, что некоторая часть или все из определенного ускорения является прямым ускорением, приложение 132 определения местоположения может выполнять отклонение над данными 304 компаса, чтобы нейтрализовать эффекты ускорения на север, замедления на юг, которые ускорение компаса оказывает на данные 304 компаса. В еще одном дополнительном примере, если приложение 132 определения местоположения определяет, что некоторая часть или все из определенного ускорения является передним ускорением, приложение 132 определения местоположения может указывать, что данные 304 компаса не должны использоваться для определения направления (например, взамен, приложение 132 определения местоположения может полагаться на входной сигнал датчика рулевого управления, данные 308 систем формирования изображений, и т. д.). После операции 708, последовательность 700 операций заканчивается.
Фиг. 8 иллюстрирует примерную последовательность 800 операций для использования многочисленных оценок не из GPS текущего местоположения 310 транспортного средства, чтобы определять общее текущее местоположение 310 транспортного средства не из GPS. Как с последовательностями 500, 600 и 700 операций, последовательность 800 операций может выполняться, в примере, контроллером 104, выполняющим приложение 132 определения местоположения.
На операции 802, контроллер 104 вычисляет оцененные текущие местоположения 310 транспортного средства с использованием более чем одного разного подхода без GPS. В примере, приложение 132 определения местоположения может использовать данные 308 системы формирования изображений, чтобы визуально отслеживать изменения расстояния и направления от последнего известного местоположения 134 для вычисления текущего местоположения 310 транспортного средства. В еще одном примере, приложение 132 определения местоположения может использовать изображение из данных 308 систем формирования изображений для считывания и идентификации дорожных знаков или других идентифицируемых объектов, которые определяют местоположение для использования в качестве текущего местоположения 310 транспортного средства. В еще одном другом примере, приложение 132 определения местоположения может использовать данные 304 компаса и данные 306 управления устойчивостью для вычисления текущего местоположения 310 транспортного средства. Должно быть отмечено, что таковые являются всего лишь примерами, и могут использоваться различные комбинации и подкомбинации подходов к определению текущего местоположения 310 транспортного средства.
На операции 804, контроллер 104 идентифицирует наиболее непротиворечивое подмножество оцененных текущих местоположений 310 транспортного средства. В примере, приложение 132 определения местоположения может определять, насколько близко данное оцененное текущее местоположение 310 транспортного средства находится к общему среднему оцененному текущему местоположению 310 транспортного средства. Приложение 132 определения местоположения дополнительно может выбирать оцененные текущие местоположения 310 транспортного средства, которые имеют меньшее отличие от общего среднего значения. В примере, приложение 132 определения местоположения может выбирать два оцененных текущих местоположения 310 транспортного средства, ближайших к среднему значению (или другое предопределенное количество оценок). В еще одном примере, приложение 132 определения местоположения может выбирать ближайшие 50% (или 25% или другое предопределенное подмножество общего количества оцененных текущих местоположений 310 транспортного средства). В еще одном другом примере, операция 804 может быть пропущена, и приложение 132 определения местоположения может использовать все из оцененных текущих местоположений 310 транспортного средства.
На операции 806, контроллер 104 усредняет наиболее непротиворечивые оцененные текущие местоположения 310 транспортного средства для получения общего оцененного текущего местоположения 310 транспортного средства. В примере, приложение 132 определения местоположения может усреднять текущие местоположения 310 транспортного средства, идентифицированные на операции 804.
На операции 808, контроллер 104 использует общее оцененное текущее местоположение 310 транспортного средства в качестве текущих местоположений 310 транспортного средства. В примере, приложение 132 определения местоположения может продолжаться использованием общего оцененного текущего местоположения 310 транспортного средства. После операции 808, последовательность 800 операций заканчивается.
Несмотря на то, что примерные варианты осуществления описаны выше, не предполагается, что эти варианты осуществления описывают все возможные формы изобретения. Предпочтительнее, словесные формулировки, используемые в описании изобретения, являются скорее словесными формулировками описания, нежели ограничения, и понятно, что различные изменения могут быть произведены, не выходя из сущности и объема изобретения. Дополнительно, признаки различных вариантов осуществления реализации могут комбинироваться для формирования дополнительных вариантов осуществления изобретения.
Корпус рулевой рейки с поперечными сужениями
Усовершенствованное прессовое соединение корпуса зубчатой рейки
Рулевой клапан с планетарной передачей
Способ управления двигателем, выполненным с возможностью работы на газообразном топливе, двигатель, имеющий цилиндры, выполненные с возможностью сжигания газообразного топлива и двигатель, выполненный с возможностью сжигания газообразного топлива
Способ проверки системы продувки паров транспортного средства, транспортное средство с гибридным приводом и способ проверки системы продувки паров на борту транспортного средства
Устройство и способ инжекционного формования вспененных полимеров
Транспортное средство (варианты)
Двигатель внутреннего сгорания с турбонагнетателем, приводная система и способ работы двигателя внутреннего сгорания с турбонагнетателем (варианты)
Блок цилиндров (варианты) и способ работы системы смазки в двигателе
Несущий каркас (варианты)
Способ проверки системы продувки паров транспортного средства, транспортное средство с гибридным приводом и способ проверки системы продувки паров на борту транспортного средства
Повышение эффективности лазерной системы зажигания
Способ продувки выхлопных газов в двигателях внутреннего сгорания (варианты)
Система лазерного нагрева
Способ эксплуатации топливной системы транспортного средства
Способ запуска двигателя (варианты) и система управления двигателем
Способы для лазерного зажигания и измерения
Способ продувки паров топлива (варианты )
Система двигателя
Способы эксплуатации двигателя

