Результат интеллектуальной деятельности: СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПОСАДКЕ
Вид РИД
Изобретение
Изобретение относится к области автоматического управления летательного аппарата (ЛА) при движении объекта по заданной нелинейной траектории посадки в режиме «Выравнивание» до точки плавного касания взлетно-посадочной полосы (ВПП).
Выполнение посадки является наиболее сложным и ответственным этапом полета для всех типов летательных аппаратов, при этом активно используется самолетная посадка, которая проводится в несколько этапов.
На первом этапе ЛА снижается до высоты 25 метров и начинает планирование, то есть прямолинейное и равномерное движение по наклонной вниз траектории (по глиссаде) до высоты 12-10 метров. Затем происходит режим «Выравнивание» ЛА - нелинейный участок движения до высоты, примерно 1 метр. Третий этап - выдерживание, предназначенное для уменьшения скорости движения ЛА по задаваемой траектории. Заключительный этап - посадка, то есть касание ЛА посадочной полосы и пробег с торможением по взлетно-посадочной полосе.
Известны различные способы автоматического управления ЛА на посадке, например по патентам РФ №2539620 В64С 25/50, №2581215, G08G 5/00, В64С 19/00.
К недостаткам известных способов следует отнести отсутствие автоматического управления полетом ЛА при заходе на посадку и посадке в наиболее сложном и ответственном режиме полета «Выравнивание» до точки плавного касания ВПП.
Наиболее близким аналогом по технической сущности к предлагаемому является «Способ автоматического управления самолетом на посадке и система для его реализации» по патенту РФ №2588173, В64С 23/00, принятый за прототип.
Способ-прототип основан на использовании управляющих сигналов, поступающих с датчиков системы измерения параметров полета в вычислительную систему автоматического управления полетом, в которой формируется основной управляющий сигнал на привод руля высоты и вспомогательный управляющий сигнал на привод секций интерцепторов, величина которых оказывает влияние на строгость автоматического управления самолетом и изменяется в зависимости от величины угла между вектором траекторной скорости самолета и направлением на программно-имитируемую «цель», движущуюся по заданной траектории на заданном расстоянии от центра масс самолета, а также скоростью изменения упомянутого угла. При этом основной и вспомогательный управляющие сигналы на руль высоты и секции интерцепторов реализованы по общему принципу дискретно-непрерывного, форсированного управления, основанного на формировании и адаптивном отслеживании заданной высоты полета самолета посредством определения и минимизации угла между вектором траекторной скорости полета самолета и направлением на программно-имитируемую «цель», движущуюся по заданной траектории на заданном расстоянии от центра масс самолета с подключением вспомогательного сигнала на секции интерцепторов для активной коррекции траектории на этапах захвата и стабилизации глиссады, выравнивания с реализацией, при необходимости, возможности ухода на второй круг.
При достижении высоты начала выравнивания (по радиовысотомеру) заданная высота по сформированной программно-имитируемой «цели», принимается равной нулю. При этом «цель» начинает двигаться по оси ВПП на высоте 0 м над уровнем ВПП (Нц = 0 м) на постоянном заданном удалении (Lц) от центра масс самолета.
На этапе «Выравнивание» расстояние до цели оказывает влияние на точку приземления (длину воздушного участка от начала выравнивания до касания ВПП): с увеличением расстояния до цели Lц длина воздушного участка увеличивается, что позволяет минимизировать нормальную перегрузку касания ВПП (обеспечить мягкую посадку). На режиме «Выравнивание» (с высоты начала выравнивания до касания ВПП) подключается вспомогательное управление интерцепторами (самолет Ту-204СМ). При этом должно выполняться условие нахождения самолета выше глиссады (ΔНг ≥ 0).
Недостаток способа-прототипа - сложность управления на посадке вследствие трудности точного определения углового положения вектора траекторной скорости на конечном этапе посадки (точка касания ВПП).
Задачей изобретения является разработка способа автоматического управления полетом ЛА, обеспечивающего повышение точности и безопасности движения на нелинейном участке снижения «Выравнивание» и более точного выхода в заданную точку касания взлетно-посадочной полосы.
Для решения поставленной задачи в способе автоматического управления продольным движением летательного аппарата (ЛА), основанном на использовании управляющих сигналов, поступающих с датчиков системы измерения параметров полета в вычислительную систему автоматического управления полетом, в которой формируются управляющие сигналы на привод руля высоты, согласно изобретению, автоматическая посадка летательного аппарата с заданной высоты снижения до точки плавного касания взлетно-посадочной полосы выполняется по кривой быстрейшего спуска - нисходящей ветви брахистохроны, координаты которой введены в бортовую цифровую вычислительную машину перед подготовкой ЛА к вылету, при этом координаты нисходящей ветви брахистохроны заданы формулой  где
где  - константа; y = Нбр.
- константа; y = Нбр.
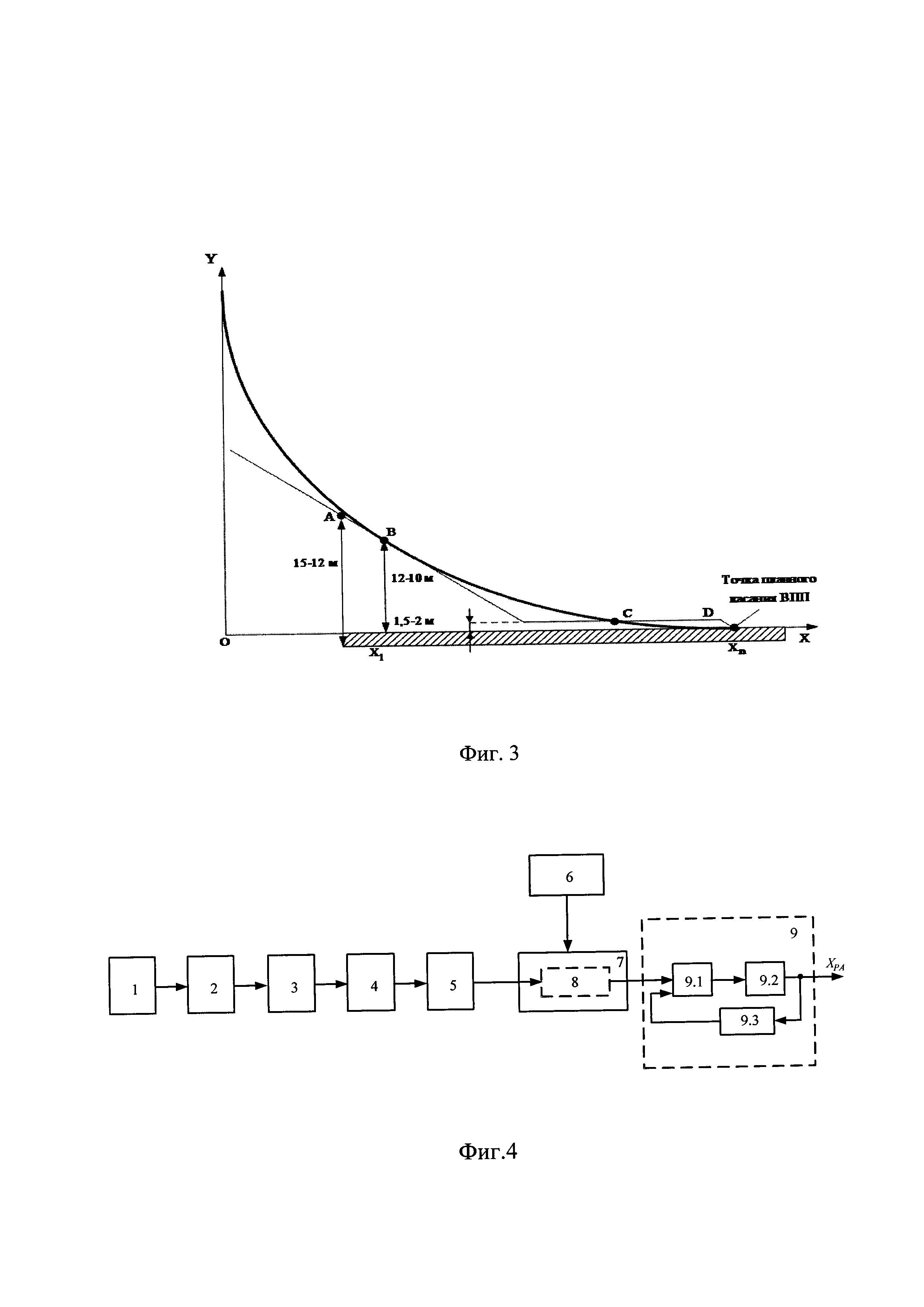
Предлагаемый способ иллюстрируется следующими графическими материалами: фиг. 1 - брахистохрона - кривая, получаемая перемещением точки А, расположенной на окружности круга заданного радиуса, при его вращении без скольжения; фиг. 2 - графическое построение брахистохроны, выполненное с целью получения формулы, описывающей ее поведение; фиг. 3 - кривая автоматической посадки ЛА в режиме «Выравнивание» (нелинейный участок посадки) и выхода его в точку плавного касания ВПП; фиг. 4 - структурная схема устройства канала автоматического управления ЛА при заходе на посадку (режим «Выравнивание» и плавное касание ВПП).
Заявляемый способ заключается в том, что на конечном и наиболее ответственном участке полета ЛА «Выравнивание» и выхода в точку касания ВПП по брахистохроне, выполняется следующим образом.
Брахистохрона - кривая, получаемая перемещением точки А, расположенной на окружности круга заданного радиуса, при его вращении без скольжения (фиг. 1) [1, 2]. Брахистохрона обеспечивает наименьшее время движения по кривой посадки, что уменьшает вероятность поражения ЛА на посадке (боевые ЛА) [3, 4].
В предлагаемом способе автоматического управления ЛА при посадке с помощью руля высоты используются сигналы глиссадного радиомаяка (полет по глиссаде), сигналы радиовысотомера до высоты 12-10 м, запрограммированного полета по нисходящей ветви брахистохроны (кривой посадки) при выполнении режима выравнивание и (скорость изменения высоты) и угловой скорости, которые поступают в вычислитель бортовой цифровой вычислительной машины (БЦВМ). Наличие этих параметров позволяет исключить уход ЛА с заданной траектории посадки. Траектория полета (кривая посадки) в вертикальной плоскости вводится в БЦВМ посредством пульта ввода данных перед подготовкой ЛА к полету.
Кривая посадки, находящаяся в вертикальной плоскости в каждой своей точке описывается относительно осей координат двумя параметрами: высотой Y(Нбр) относительно ВПП при посадке и соответствующей точкой X на средней линии ВПП.
Рассмотрим построение траектории автоматической посадки летательного аппарата по кривой посадки с момента включения режима посадки до точки плавного касания ВПП.
При этом начальная точка включения автоматического полета ЛА по кривой посадки и конечная точки приземления определяются высотой выбранной начальной точки выполнения кривой посадки.
Графическое построение брахистохроны, выполненное с целью получения формулы (швейцарский математик И. Бернулли, 1596 г.), описывающей поведение брахистохроны, поясняется кривой, представленной на фиг. 2. Потенциальная энергия материальной точки в начальный момент будет определяться высотой, с которой начинается движение по нисходящей ветви брахистохроны y0 = H0.
Для пояснения построения брахистохроны вертикальная ось OY разбивается на n равных частей. Через точки разбиения проводятся прямые, параллельные оси ОХ. Путь катящегося без скольжения шарика представляет собой кусочно-линейную траекторию. Задача состоит в определении угла, под которым направлен отрезок в каждой полосе. С этой целью И. Бернулли обращается к принципу Ферма, а именно к тому, что свет всегда проходит расстояние за кратчайшее время. Если V1 - скорость в одной полосе, направленная под углом α1 к вертикали, a V2 - скорость в следующей полосе, направленная под углом α2 к вертикали, то согласно закону синуса имеем [2, 3]:

Выражая скорость движения шарика равной  получим общую формулу
получим общую формулу

где g - ускорение свободного падения, у - высота места нахождения, катящегося без скольжения шарика в момент времени t, относительно заданной начальной точки.
Для большого количества отрезков по оси OY формулу (2) можем записать в следующем виде:

Возведем в квадрат значение скорости движения шарика  и подставим полученную формулу в выражение (2), имеем:
и подставим полученную формулу в выражение (2), имеем:

Определим производную из фиг. 3, которая равна
y = dy/dx = ctgα = cosα/sinα
Введем тождество sin2 α + cos2 = 1 и поделим его на sin2 α, получим
1 + ctg2 α=1/sin2α
Поставляя sin2 α = 1/(1 + ctg2α) в выражение (4) и учитывая, что
sin2 α = у, получаем формулу брахистохроны

где  - константа.
- константа.
В том случае, когда горизонтальные прямые расположены бесконечно близко друг к другу, кусочно-линейная траектория становится кривой линией. Для этой кривой в каждой произвольно выбранной точке xm, ym угол между касательной, проведенной к кривой и вертикальным отрезком - угол αm.
Если V - скорость в точке xm, ym и угол αm, который составляет касательная с вертикалью, то кривая удовлетворяет уравнению (5) и является брахистохроной.
Уравнение брахистохроны (5), полученное И. Бернулли, совпадает с уравнением циклоиды (6).

Чтобы убедиться в этом, возводим в квадрат левую и правую части формулы (6) и переносим параметры правой части, кроме k2 в левую часть, получая при этом выражение (для константы k2 = 2h), аналогичное формуле (5).
На фиг. 3 представлена кривая автоматической посадки ЛА в режиме «Выравнивание» (нелинейный участок посадки) с выходом ЛА в точку плавного касания ВПП. Существующая траектория посадки ЛА обозначена тремя тонкими линейными отрезками.
Точка А характеризует пролет ЛА по глиссаде торца взлетно-посадочной полосы на высоте 15-12 м. Точка В есть начало траектории автоматического полета по брахистохроне с высоты 12-10 м, точка С - пересечение брахистохроны с горизонтальной линией на высоте 1,5…2,0 м и точка D - точка плавного касания ВПП (касание задних колес).
Предлагаемый способ, реализуемый в системе автоматического управления, обеспечивает управление на конечном этапе захода на посадку в режиме «Выравнивание» и плавное касание ВПП. Управление выполняется по нисходящей ветви брахистохроны (точки кривой посадки В, С, D).
Траектория (кривая) посадки - нисходящая ветвь брахистохроны вводится в вычислитель БЦВМ в период подготовки ЛА к полетам с пульта ввода данных (фиг. 4). На самолете может быть использована БЦВМ «БАГЕТ-53-31М Серия 1».
Вычислитель представляет собой электронный блок БЦВМ, включающий все необходимые измерительные устройства: процессор, память и средства ввода - вывода.
Измеренная информация подвергается в вычислителе определенной обработке - фильтрации, масштабированию, линеаризации, калибровке, при этом по величине сигнала рассчитывается значение соответствующей физической величины - скорости полета, температуры воздуха, параметров, необходимых для выполнения заданного режима полета.
Рассчитанное значение выдается из вычислителя всем заинтересованным в ней потребителям, в том числе и в системы автоматизированного и автоматического управления полетом (САУП), системы индикации и сигнализации. В вычислителе формируется закон управления полетом.
Законом регулирования или управления автопилота называется простейшее уравнение, отображающее наиболее существенные связи и операции, выполняемые автопилотом. Закон управления - это тот идеальный алгоритм или оператор, к которому стремятся при построении системы управления [5].
Следует отметить, что система автоматического управления ЛА включает в себя три канала управления: тангажа (высоты), крена и курса (рыскания). Нами рассматривается только канал высоты.
Управление продольным движением (по высоте) осуществляется через канал руля высоты. Отклонение руля высоты вызывает изменение угла атаки и, как следствие, изменение высоты полета.
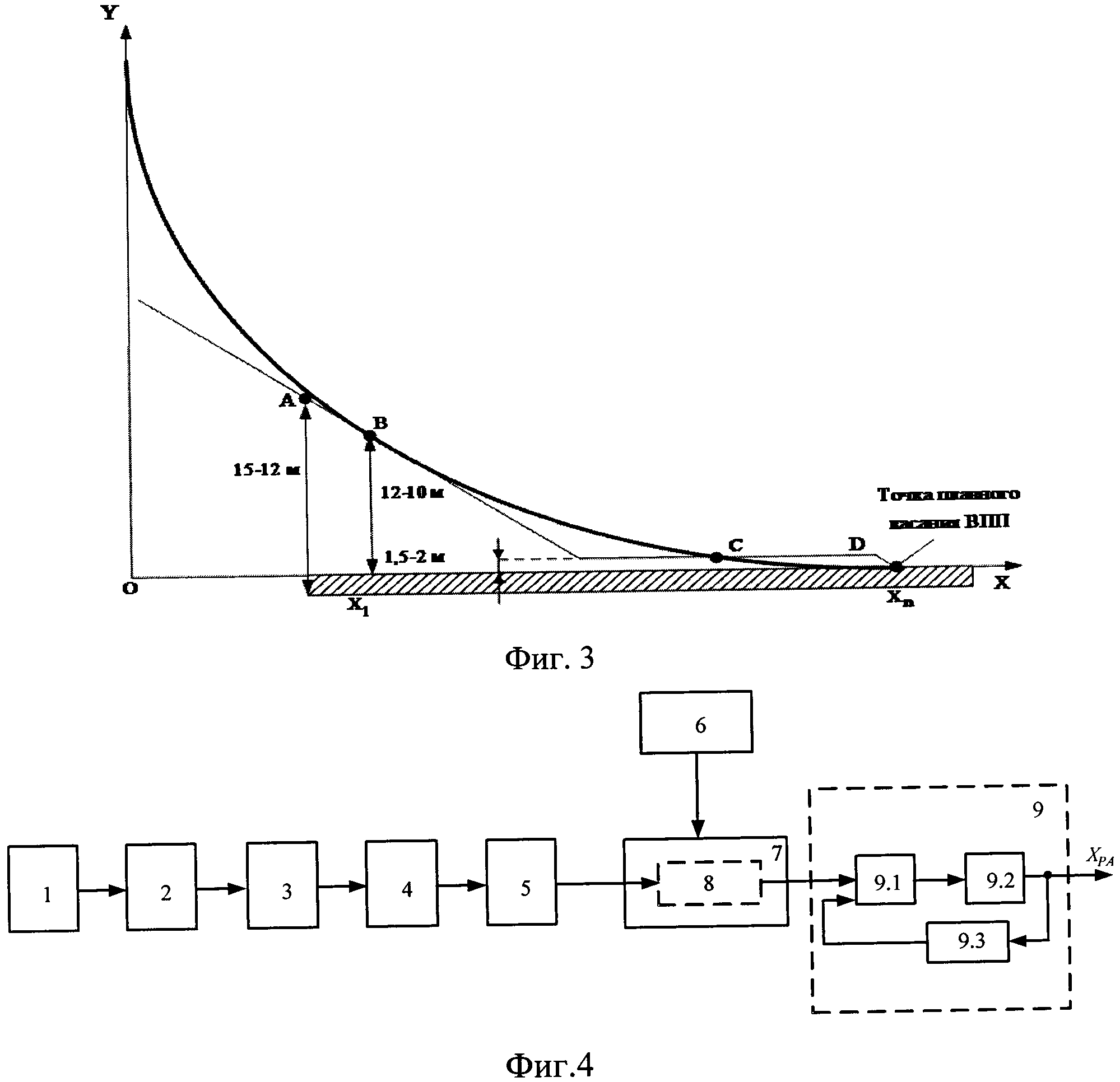
Структурная схема устройства канала автоматического управления ЛА при заходе на посадку (режим «Выравнивание» и плавное касание ВПП) представлена на фиг. 4, где обозначено:
1 - пилотажные измерители (датчики информации) параметров;
2 - устройство согласования;
3 - схема сравнения;
4 - блок переключения управления высотой полета;
5 - усилитель;
6 - пульт ввода данных кривой посадки;
7 - бортовая цифровая вычислительная машина. Может применяться на борту ЛА БЦВМ «БАГЕТ-53-31М Серия 1;
8 - вычислитель БЦВМ;
9 - сервопривод;
9.1 - усилитель сервопривода;
9.2 - рулевой агрегат сервопривода;
9.3 - обратная связь.
Структурная схема, реализующая предлагаемый способ, содержит последовательно соединенные пилотажные измерители (датчики информации) параметров 1, устройство согласования 2, схему сравнения 3, блок переключения управления высотой полета 4, усилитель 5, пульт ввода данных параметров кривой посадки в БЦВМ 6, бортовую цифровую вычислительную машину 7 с вычислителем 8 и сервопривод 9. Сервопривод (исполнительное устройство канала управления высотой полета) включает в себя: магнитный усилитель мощности 9.1, рулевой агрегат 9.2, где ХРА - перемещение рулевого агрегата. При автоматическом управлении высотой полета в сервоприводе могут применяться 3 вида различных обратных связей: жесткая (ЖОС), скоростная (СОС) и изодромная обратная связь (ИОС). Чаще всего применяется жесткая или скоростная обратная связь.
Пилотажные измерители (датчики информации) 1 измеряют следующие параметры:
Нрв - высота полета, измеряемая радиовысотомером;
Нбр - высота ЛА при движении по кривой посадки (брахистохроне) в момент времени ti;
ωZ - угловая скорость ЛА, относительно поперечной оси (измеряется датчиком угловой скорости ДУС).
Устройство согласования 2 обеспечивает согласование выходов измерителей 1 с последующими блоками вычислителя 8 и фиксацию заданного углового положения, которое соответствует желаемой высоте полета в момент включения режима автоматического управления. При этом не происходит резкой перекладки рулевых поверхностей (безударное включение), так как до включения автоматического управления сигнал, поступающий в вычислитель 8 обнулялся устройством согласования 2. После включения режима автоматического управления сигналы с устройства управления 2 поступают в схему сравнения 3, которая обеспечивает сравнение сигналов Нбр и Нрв. При этом, если сигнал Нбр больше, чем Нрв до точки В кривой посадки, то управление снижением ЛА происходит по сигналу радиовысотомера Нрв. При равенстве сигналов в точке В сигнал от радиовысотомера может быть использован для формирования сигнала корректировки движения по кривой посадки. Управление посадкой переходит на реализацию введенных параметров кривой посадки по сигналам Нбр. Для кривой посадки высота Нбр отождествляется с нормальной осью OY, а средняя линия взлетно-посадочной полосы с осью ОХ (фиг. 2, 3). Блок переключения управления высотой полета 4 от радиовысотомера на кривую посадки осуществляет переход ЛА на траекторию кривой посадки. Усилитель 5 усиливает сигналы высоты Нрв радиовысотомера и сигналы Нбр, формирующие полет ЛА. Эти данные находятся в памяти БЦВМ. В вычислителе БЦВМ 8 формируются законы управления рулем высоты ЛА на посадке. Сервопривод 9 обеспечивает перемещение рулевого агрегата и соответственно этому перемещению, отклонение рулевой поверхности ЛА. Сервопривод включает в себя усилитель 9.1, рулевой агрегат 9.2 и обратную связь 9.3. В зависимости от вида обратной связи 9.3 меняется точность управления.
Закон управления высотой по кривой посадки имеет следующий вид:

где Нвкл - высота перехода управления ЛА по кривой посадки;
Δδв РА - отклонение руля высоты от балансировочного положения;
 - передаточные числа.
- передаточные числа.
Нвкл - Нбр - изменение высоты ЛА по кривой посадки до точки плавного касания ВПП;
р(Нвкл-Нбр) - сигнал вертикальной скорости, устраняющий колебания центра масс ЛА относительно траектории полета;
Δϑ - приращение начального невозмущенного угла тангажа;
ωz - проекция вектора угловой скорости вращения самолета на связанную ось oz.
Включение режима «Выравнивание» и движение по кривой посадки происходит автоматически следующим образом.
Обозначим высоту Нвкл включения управления ЛА относительно ВПП в момент перехода управления по кривой посадки. Относительно этой высоты будет выполняться корректировка полета, если ЛА уходит с высоты кривой посадки.
Отклонение ЛА от осевой линии ВПП при боковом ветре, вызывающем появление угла скольжения во время посадки, устраняется перемещением руля направления.
Технический результат - повышение эффективности управления ЛА при заходе на посадку и посадке в автоматическом режиме полета по нисходящей ветви брахистохроны (кривой наискорейшего спуска) и повышение точности выхода в точку касания ВПП. Кроме того, по сравнению с прототипом предлагаемый способ проще в осуществлении, т.к. кривая наискорейшего спуска (нисходящая ветвь брахистохроны) вводится в вычислитель ЛА заранее, при подготовке к полету, с пульта ввода данных и при снижении до высоты полета 12-10 м и скорости, рекомендуемой для конкретного типа ЛА, автоматическое управление полетом выполняется по уже заданной траектории (кривой) быстрейшего спуска, именуемой брахистохроной (она же циклоида, фиг. 1).
Следует отметить существенную эффективность посадки беспилотного летательного аппарата (БЛА), обусловленную отсутствием на борту летчика.
Применение БЛА позволит выполнять не только режим «Выравнивание», но и построить траекторию всей нисходящей ветви брахистохроны до точки касания ВПП. При этом траектория посадки может быть рассчитана для любого типа БЛА.
Помимо этого может быть построена траектория увода БЛА от преследования противником при автоматическом наборе высоты по восходящей траектории брахистохроны.
БЛА имеет преимущество перед пилотируемым ЛА. При уходе от преследования противником возможно создание больших отрицательных перегрузок при снижении, с последующим набором высоты полета.
Источники информации.
1. Большая Советская Энциклопедия.
2. Prosdo.ru>ouazob/Задача о брахистохроне b/mail.html.ru.
3. Брахистохрона - кривая наискорейшего спуска - old.msun.ru>Vector/GMP/Upragnenia/upr11 - 1.htm/
4. Сумбатов А.С. Вычислительный центр им. А.А. Дородницына ФИЦ ИУ РАН. Задача о брахистохроне (классификация обобщений и некоторые последние результаты). Труды МФТИ. 2017. Том 9, №3.
5. Справочник по теории автоматического управления. Под редакцией А.А. Красовского. М.: Наука. Главная редакция физико-математической литературы. 1987. 712 с.
6. А.А. Красовский, Ю.А. Вавилов, А.И. Сучков. Системы автоматического управления летательных аппаратов. ВВИА им. проф. Н.Е. Жуковского, 1986. 480 с.
7. Патент РФ №2040434, 1993. МПК В64, С 13/18 G05D 1/00. Система автоматического управления посадкой самолета.
8. RU 2040434 С1, 25.07.1995.
9. Система автоматического управления самолетом при заходе на посадку. RU 2206873 С1, 20.06. 2003.
10. Устройство определения параметров полета для автоматической посадки самолета. RU 2284058 С2, 20.09.2006.
11. Система автоматической посадки летательных аппаратов. RU 2287838 С2, 20.11.2006. МПК S 1.100

Способ компенсации теплового изгиба и деформации оптических каналов моноблока лазерного гироскопа
Способ компенсации теплового изгиба и деформации оптических каналов моноблока лазерного гироскопа
Устройство для измерения разности фаз радиосигналов
Пьезорезонансный датчик для определения относительной влажности воздуха
Пиротехнический патрон инфракрасного излучения
Осевой компрессор
Способ защиты вертолета от управляемых боеприпасов
Устройство для экспресс-анализа качества продуктов
Ветроэнергетическая установка
Боевой элемент с координатором цели

