Результат интеллектуальной деятельности: СПОСОБ ИДЕНТИФИКАЦИИ ТИПА САМОЛЕТА СРЕДСТВАМИ ПАССИВНОЙ ОПТИЧЕСКОЙ ЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к комбинации получения изображения и операции распознавания, а именно к способам пассивной дистанционной телевизионной идентификации типа самолета, и может быть использовано в устройствах контроля воздушного движения.
Существует достаточно большое количество способов дистанционного распознавания самолетов. Наиболее распространенным являются способы как визуального по изображению на аэродромах взлета-посадки, так и радиолокационного распознавания типа объекта по признаку «высота-скорость».
Способы, основанные на радиолокационном распознавании самолетов, не обладают высокой разрешающей способностью, не являются пассивными, не могут применяться в конфликтных ситуациях для опознавания «свой -чужой», т.к. активная локация демаскирует свои действия.
В свою очередь идентификация самолетов оператором с использованием визуальных оптических приборов имеет свои недостатки, среди которых определяющим является т.н. человеческий фактор (усталость зрения, потери внимания и др.).
Известен способ пассивной дистанционной телевизионной идентификации объектов и устройство для его осуществления RU 2603998, 10.12.2006. Технический результат достигается за счет использования в качестве идентифицирующих признаков геометрических характеристик изображения, таких как коэффициент формы изображения самолета - отношение площади изображения к квадрату длины его периметра и эксцентриситет изображения - отношение ширины к длине изображения фюзеляжа. Используемые геометрические характеристики являются безразмерными и инвариантными к масштабу и повороту изображения. Недостатком известного способа является необходимость получения изображения самолета в горизонтальной плоскости проекции или преобразования полученного изображения в горизонтальную плоскость для измерения площади изображения.
Наиболее близким по технической сущности к заявляемому изобретению является способ автоматизированного системно-когнитивного анализа http://ej.kubagro.ru/2015/10/pdf799.pdf, используемый для решения задач, связанных с наблюдением, идентификацией типов и моделей самолетов по их силуэтам снизу, точнее, по внешним контурам. Известный способ включает: получение видеокадров изображения с помощью оптической системы, преобразование видеокадров изображения оцифровкой сканируемых изображений самолетов, создание математических моделей изображений самолетов - идентификаторов геометрических размеров изображения; создание баз данных эталонных идентификаторов - математических моделей конкретных самолетов с применением теории информации и моделей обобщенных образов самолетов различных типов и моделей; сравнение значений идентификаторов геометрических характеристик образа конкретного самолета - математических моделей изображения с обобщенными образами самолетов различных типов и моделей из баз данных эталонных идентификаторов эксплуатируемых самолетов, определение количественной степени сходства - различия между ними, т.е. идентификация типа и модели самолета по его силуэту (контуру) снизу. В известном способе оцифровка изображений самолетов, основана на использовании полярной системы координат, центра тяжести изображения и его внешнего контура. Для оцифровки изображений, используют преобразования, стандартизирующие их положение изображений, размеры (разрешение, расстояние) и угол поворота (ракурс) в трех плоскостях, поэтому результаты оцифровки изображений инвариантны (независимы) относительно их положения, размеров и поворотов.
Недостатками известного способа является то, что для идентификации типа и модели самолета используется только силуэт - контур самолета при наблюдении его снизу, т.е. в одной только горизонтальной проекции трехмерного объекта; оцифровка изображений самолетов, основанная на использовании полярной системы координат при обходе контура изображения вектором из его центра тяжести по окружности от 0 до 360° с запоминанием измеренных значений векторов, увеличивает требуемый объем памяти для хранения данных и негативно влияет на быстродействие процесса идентификации.
Технический результат заявляемого изобретения - повышение достоверности идентификации типа самолета не зависимо от ракурса его наблюдения, минимизация требуемого объема памяти, повышение быстродействия процесса идентификации.
Технический результат заявляемого способа идентификации типа самолета средствами пассивной оптической локации достигается за счет: получения видеокадров изображения с помощью оптической системы; преобразования видеокадров изображения в информационную матрицу сигналов; преобразования информационной матрицы сигналов в бинарную матрицу; обнаружения на бинарной матрице границ изображения: концовок крыльев, фюзеляжа и пассажирского салона и формирования аппроксимирующей изображение прямоугольной электронной рамки; вычисления по длине сторон этой рамки измеренных геометрических характеристик изображения: длины изображения фюзеляжа, диаметра изображения фюзеляжа, ширины изображения размаха крыла, корректировки этих значений в проекционные плоскости с использованием углов ракурса наблюдения самолета от внешней локации и вычисления идентификаторов геометрических характеристик изображения; создания баз данных эталонных идентификаторов эксплуатируемых самолетов; сравнения значений идентификаторов геометрических характеристик изображения с близкими эталонными значениями идентификаторов из баз данных эксплуатируемых самолетов и принятия решения о типе самолета по степени близости значений идентификаторов.
Заявляемое изобретение иллюстрируется Фиг. 1-8, Таблицами 1 и 2. Фиг. 1. Фронтальная проекция самолета. Фиг. 2. Профильная проекция самолета. Фиг. 3. Горизонтальная проекция самолета.
Фиг. 4. Положения самолета относительно плоскостей проекции, измеряемых углов и проекций характеристик самолета.
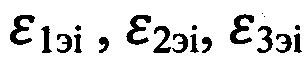
Фиг. 5. Иллюстрация вычисления идентификатора ε2 в горизонтальной проекции изображения самолета.
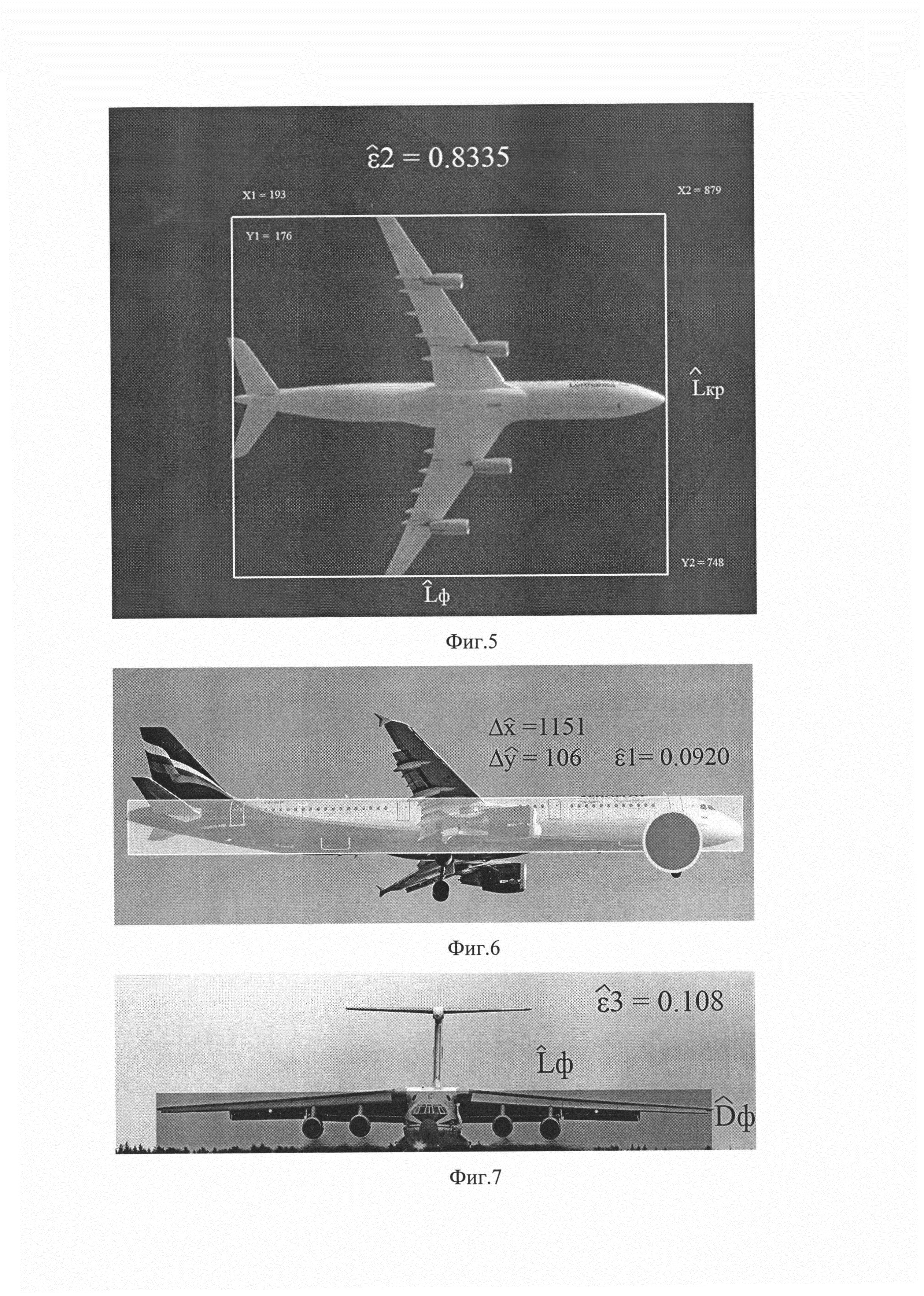
Фиг. 6. Иллюстрация вычисления идентификатора ε1 в профильной проекции изображения самолета.
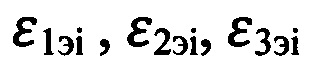
Фиг. 7. Иллюстрация вычисления идентификатора ε3 во фронтальной проекции изображения самолета.
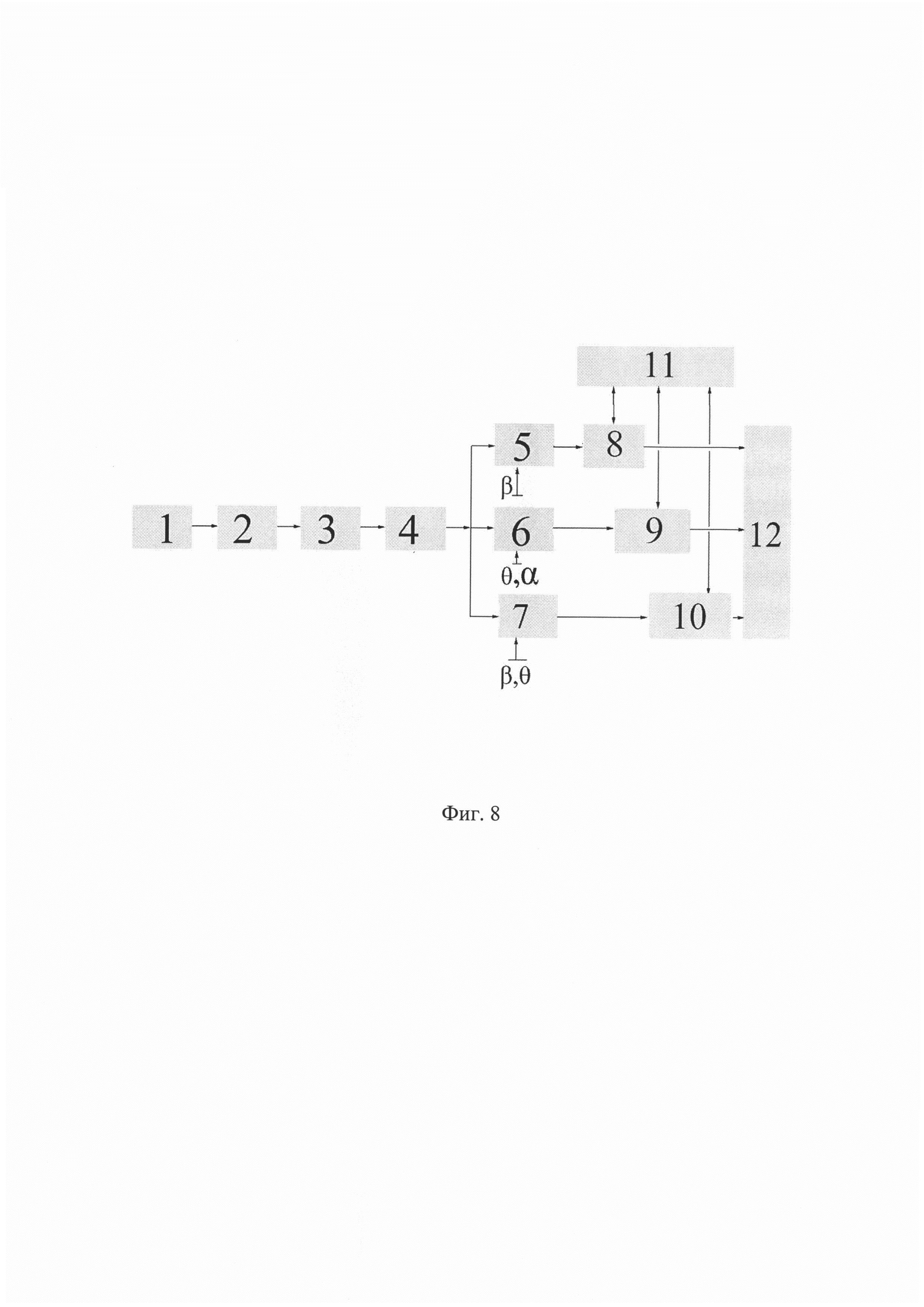
Фиг. 8. Устройство идентификации типа воздушного судна средствами пассивной оптической локации. 1 - блок оптической системы, 2 - блок фотоприемного устройства, 3 - блок бинарного квантования сигналов, 4 - блок формирования измерительной рамки, 5 - блок вычисления идентификатора ε1, 6 - блок вычисления идентификатора ε2, 7 - блок вычисления идентификатора ε3, 8 - блок сравнения значения идентификатора ε1 и эталонных идентификаторов  i-типов самолетов в базе данных, 9 - блок сравнения значения идентификатора 82 и эталонных идентификаторов
i-типов самолетов в базе данных, 9 - блок сравнения значения идентификатора 82 и эталонных идентификаторов  i-типов самолетов в базе данных, 10 - блок сравнения значения идентификатора ε3 с эталонными значениями идентификаторов
i-типов самолетов в базе данных, 10 - блок сравнения значения идентификатора ε3 с эталонными значениями идентификаторов  i-типов самолетов в базе данных, 11 - блок базы данных эталонных значений идентификаторов самолетов, 12 - блок индикации типа воздушного судна.
i-типов самолетов в базе данных, 11 - блок базы данных эталонных значений идентификаторов самолетов, 12 - блок индикации типа воздушного судна.
Таблица 1. Значения идентификаторов для самолетов Аэробус.
Таблица 2. Значения идентификаторов для самолетов БОИНГ.
В заявляемом изобретении предложено использовать в качестве идентификаторов геометрических характеристик изображения - значений эксцентриситета изображения самолета в трех проекциях: горизонтальной, профильной и фронтальной. Аппроксимация изображения самолета до электронной прямоугольной рамки позволяет эффективно отсекать от изображения самолета «шумы» такие как: инверсный след, атмосферные образования и другие оптические явления.
Эксцентриситет изображения - отношение его двух геометрических размеров: высоты и ширины. Эксцентриситет изображения не зависит от масштаба, сдвига и ориентации изображения. При наблюдении самолета в зените изображение будет соответствовать горизонтальной проекции, при наблюдении спереди и сбоку - фронтальной и профильной проекции соответственно. Эксцентриситет изображения самолета в каждой из этих трех проекций вычисляется по геометрическим размерам прямоугольников, аппроксимирующих изображение самолета Фиг. 1-3.
Таким образом, идентификатор изображения самолета ε, для каждой его проекционной плоскости - профильной, горизонтальной и фронтальной вычисляется соответственно:
ε1=Dф/Lф, ε2=LКР/Lф, ε3=Dф/LКР,
где: Dф, Lф, и LКР - диаметр фюзеляжа, длина фюзеляжа и размах крыла соответственно. Идентификаторы связаны соотношением ε2=ε1/ε3.
Результаты расчетов значений идентификаторов для самолетов БОИНГ и АЭРБАС в трех проекционных плоскостях, представлены в Таблицах 1 и 2.
В реальных условиях наблюдения, положение самолета (ракурс) может не совпадать с проекционными плоскостями. Положение самолета относительно наблюдателя определяется направлением его траектории, а также положением самолета в соответствии с вертикальной или нисходящей скоростью движения «взлет - посадка» или виражом. Если представить фюзеляж в виде аппроксимирующего его цилиндра, то при любом положении цилиндра относительно проекционных плоскостей, всегда найдется сечение, размер которого будет соответствовать его диаметру. Таким образом, измеряемый размер диаметра фюзеляжа самолета является инвариантным к ракурсу его наблюдения. Другие измеряемые геометрические характеристики изображения самолета - длина фюзеляжа и размах крыла зависят от его ракурса и вычисляются по геометрическим размерам прямоугольников, аппроксимирующих изображение самолета. Пример положения самолета относительно плоскостей проекции, измеряемых углов и проекций характеристик самолета иллюстрирует Фиг. 4. Геометрические характеристики самолета предлагается корректировать по значениям углов ракурса самолета β, θ, α от внешнего локатора. Так длину изображения фюзеляжа самолета во фронтальной проекции (сбоку) корректируют по значению курсового угла β. Для этого используют корректирующий коэффициент 1/cosβ. В этом случае откорректированная длина изображения фюзеляжа самолета определяется как  где
где  - измеренное значение длины изображения фюзеляжа. Аналогично корректируют измеренное значение размаха крыла,
- измеренное значение длины изображения фюзеляжа. Аналогично корректируют измеренное значение размаха крыла,  Для коррекции изображения в фронтальной проекции используют угол θ - угол наклона траектории набора высоты. Длина фюзеляжа в этом случае определяется, как
Для коррекции изображения в фронтальной проекции используют угол θ - угол наклона траектории набора высоты. Длина фюзеляжа в этом случае определяется, как  Угол α аналогично используется для коррекции измеренных значений размаха крыла на вираже самолета. Такой случай для наблюдений исключительно редкий.
Угол α аналогично используется для коррекции измеренных значений размаха крыла на вираже самолета. Такой случай для наблюдений исключительно редкий.
Идентификация типа самолета производится путем сравнения значений идентификаторов ε1 ε2, ε3 с близкими эталонными  для i-гo самолета из базы данных. Если их разность стремится к нулю, или находится в пределах допустимых ошибок, то принимается решение о принадлежности воздушного объекта к определенному типу самолета. Приоритет в выборе плоскости проекции для определения предпочтительного идентификатора определяется по траектории его полета относительно наблюдателя. Например, если самолет на взлете - предпочтительно используют ε3, в зените - ε2, «на траверсе» от наблюдателя - ε1.
для i-гo самолета из базы данных. Если их разность стремится к нулю, или находится в пределах допустимых ошибок, то принимается решение о принадлежности воздушного объекта к определенному типу самолета. Приоритет в выборе плоскости проекции для определения предпочтительного идентификатора определяется по траектории его полета относительно наблюдателя. Например, если самолет на взлете - предпочтительно используют ε3, в зените - ε2, «на траверсе» от наблюдателя - ε1.
Эффективность заявляемого способа. Заявляемые способ и устройство позволяют повысить универсальность идентификации типа самолета, за счет использования трех идентификаторов, для каждой из трех проекционных плоскостей (профильной, фронтальной и горизонтальной), что повышает вероятность правильной идентификации изображения
Ри=1-(1-Р1)(1-Р2)(1-Р3),
где P1, Р2, Р3 - вероятности правильной идентификации воздушного судна в каждой проекционной плоскости.
Заявляемый способ в отличие от известного способа минимизирует требования к запоминающему устройству базы данных, т.к. при обходе линии контура из центра тяжести изображения самолета с дискретностью в один угловой градус с измерением расстояний «центр тяжести - контур», необходимо запомнить и хранить 360 значений. В заявляемом способе необходимо запоминать и хранить только три значения идентификаторов для каждого типа самолета. Предлагаемые решения повышают быстродействие идентификации типа воздушного судна.
На Фиг. 5 приведен пример вычисления идентификатора ε2 в горизонтальной проекции изображения самолета. Значение идентификатора изображения самолета, вычисленного по сторонам прямоугольной рамки, равно.0,8338.  . В Таблице 1 для Аэробусов находим наиболее близкое ему эталонное значение
. В Таблице 1 для Аэробусов находим наиболее близкое ему эталонное значение  Это значение соответствует самолету А340-600. Расстояние в относительных значениях измеренной величины и эталонной, составляет 1,11%. В Таблице 2 для Боингов находим наиболее близкое эталонное значение
Это значение соответствует самолету А340-600. Расстояние в относительных значениях измеренной величины и эталонной, составляет 1,11%. В Таблице 2 для Боингов находим наиболее близкое эталонное значение  . Это значение соответствует самолету В777-500. Относительное расстояние в размерности вычисляемых значений составляет 1,2%. Таким образом, наиболее достоверно идентифицировать самолет как А340-600.
. Это значение соответствует самолету В777-500. Относительное расстояние в размерности вычисляемых значений составляет 1,2%. Таким образом, наиболее достоверно идентифицировать самолет как А340-600.
На Фиг. 6 приведен пример вычисления идентификатора ε1 в профильной проекции изображения самолета. Значение идентификатора изображения самолета, вычисленного по сторонам прямоугольной рамки, составляет ε1=0,1087. В таблице 1 для Аэробусов находим наиболее близкое ему эталонное значение  самолета A320-100. Относительное расстояние в размерности вычисляемых значений составляет 3,4%. В таблице 2 находим ближайшее эталонное значение
самолета A320-100. Относительное расстояние в размерности вычисляемых значений составляет 3,4%. В таблице 2 находим ближайшее эталонное значение  самолета В767-200.
самолета В767-200.
Относительное расстояние в размерности вычисляемых значений этого самолета составит 4,9%. Таким образом, наиболее достоверно идентифицировать самолет A320-100.
На Фиг. 7 приведен пример вычисления идентификатора ε3 в фронтальной проекции изображения самолета. Значение идентификатора изображения самолета ИЛ 76, вычисленный по сторонам прямоугольной рамки ε3=0,108. В конструкторской документации ИЛ 76 находим эталонное значение  Относительное расстояние в размерности вычисляемых значений этого самолета составит - 3,8%. Ближайших аналогов этому самолету нет.
Относительное расстояние в размерности вычисляемых значений этого самолета составит - 3,8%. Ближайших аналогов этому самолету нет.
В остальных случаях при вычислении идентификаторов применяются вышеописанные корректировки.
Реализация заявляемого способа пассивной дистанционной телевизионной идентификации воздушного объекта осуществляется при помощи устройства представленного на Фиг. 8.
Получение видеокадров изображения самолета осуществляется с помощью блока оптической системы 1, причем выход блока оптической системы 1 соединен с входом блока фотоприемного устройства 2 в котором видеокадр изображения преобразуется в информационную матрицу сигналов, причем выход блока фотоприемного устройства 2 соединен с входом блока бинарного квантования сигналов 3, преобразующим информационную матрицу сигналов в бинарный контурный «абрис» с единичными «1» сигналами в пределах контура изображения и нулевыми «0» сигналами вне контура изображения, причем выход блока бинарного квантования соединен с входом блока формирования измерительной рамки 4 обнаружением вертикальных и горизонтальных границ изображения в двумерной матрице отображения сигналов и формированием прямоугольной «электронной рамки», аппроксимирующей изображение в каждой проекционной плоскости - профильной, горизонтальной и фронтальной, значения координат узлов которой, в виде цифровой матрицы, поступают на первые входы трех блоков соответственно: блока 5 - блока вычисления идентификатора ε1; блока 6 - блока вычисления идентификатора ε2, блока 7 - блока вычисления идентификатора ε3, в которых вычисляются измеренные значения длины изображения фюзеляжа, диаметра изображения фюзеляжа, ширины изображения размаха крыла которые корректируются в соответствии со значениями углов ракурса наблюдения самолета β, θ, α от внешней локации поступающих на вторые входы блоков вычисления идентификаторов идентификаторов 5, 6 и 7 и по скорректированным значениям геометрических параметров изображения вычисляются значения идентификаторов ε1 ε2, ε3 соответственно и передаются в блоки сравнения значения идентификаторов, причем выходы блоков 5, 6, 7 соединены с первыми входами блоков сравнения значения идентификаторов ε1 ε2, ε3 и эталонных идентификаторов для i-типов самолетов в базе данных  8, 9, 10 соответственно, вторые входы которых соединены двухсторонней связью с блоком базы данных эталонных значений идентификаторов самолетов 11, в блоках 8, 9, 10 производятся вычисления разности измеренного и близких эталонных значений идентификаторов ε1, ε2, ε3 соответственно с близкими эталонными
8, 9, 10 соответственно, вторые входы которых соединены двухсторонней связью с блоком базы данных эталонных значений идентификаторов самолетов 11, в блоках 8, 9, 10 производятся вычисления разности измеренного и близких эталонных значений идентификаторов ε1, ε2, ε3 соответственно с близкими эталонными  для i-гo самолета из базы данных, при этом выходы блоков 8, 9, 10 соединены с входами блока индикации типа воздушного судна 12, в котором по вычисленной разности измеренных и эталонных значений идентификаторов принимается решение о типе воздушного судна, которое выводится на индикатор блока индикации типа воздушного судна 12.
для i-гo самолета из базы данных, при этом выходы блоков 8, 9, 10 соединены с входами блока индикации типа воздушного судна 12, в котором по вычисленной разности измеренных и эталонных значений идентификаторов принимается решение о типе воздушного судна, которое выводится на индикатор блока индикации типа воздушного судна 12.
Для изготовления заявляемого устройства используются стандартные комплектующие.
Способ радиолокационного определения времени окончания активного участка баллистической траектории
Способ радиолокационного обнаружения маневра баллистической цели на пассивном участке траектории
Способ определения модуля скорости аэродинамической цели
Способ определения скорости движущихся объектов методом пассивной локации
Способ пассивной дистанционной телевизионной идентификации объектов и устройство для его осуществления
Способ и станция резонансной радиолокации
Способ радиолокационного определения модуля скорости баллистического объекта
Обнаружитель маневра баллистической ракеты по фиксированной выборке квадратов дальности
Способ и устройство определения курса неманеврирующей аэродинамической цели с использованием выборки квадратов дальности
Радиолокационная станция кругового обзора "резонанс"
Способ радиолокационного определения времени окончания активного участка баллистической траектории
Способ радиолокационного обнаружения маневра баллистической цели на пассивном участке траектории
Способ определения модуля скорости аэродинамической цели
Способ определения скорости движущихся объектов методом пассивной локации
Способ пассивной дистанционной телевизионной идентификации объектов и устройство для его осуществления
Способ и станция резонансной радиолокации
Способ радиолокационного определения модуля скорости баллистического объекта
Обнаружитель маневра баллистической ракеты по фиксированной выборке квадратов дальности
Способ и устройство определения курса неманеврирующей аэродинамической цели с использованием выборки квадратов дальности
Радиолокационная станция кругового обзора "резонанс"

