Результат интеллектуальной деятельности: Способ и станция резонансной радиолокации
Вид РИД
Изобретение
Область техники
Изобретение относится к области резонансной радиолокации и может быть использовано в системе управления воздушным движением (УВД) для дальнего обнаружения и распознавания летательных аппаратов (ЛА).
Уровень техники
Известны способы и средства резонансной радиолокации [1-3], основанные на использовании электромагнитных волн (ЭМВ) с длиной волны

где L - геометрический размер ЛА и/или его конструктивных резонирующих элементов (крыльев, фюзеляжа, подвесных конструкций).
Положительным качеством резонансной радиолокации является увеличенная (≥10) величина отраженного радиосигнала по сравнению со значением эффективной поверхности рассеяния (ЭПР) при диффузном отражении радиосигнала от ЛА. Следствием этого согласно теории радиолокации [4] является увеличенная дальность обнаружения ЛА.
Другим положительным качеством резонансной радиолокации является автоматическая защита от антирадарной технологии СТЭЛС в резонансном диапазоне волн (1) для крупногабаритных (L≥0.5 м) ЛА. Это связано с тем, что для создания радионевидимости ЛА толщина радиопоглощающих покрытий должна быть кратной λ/4. В условиях (1) резонанса вес радиопоглощающих покрытий может превышать вес самого ЛА. Такой ЛА становится неподъемным и не способным к движению в воздушной среде.
Несмотря на существенные преимущества резонансная радиолокация до настоящего времени не нашла широкого применения.
Это связано с тем, что в указанном (1) диапазоне резонирования типовых аэродинамических и баллистических ЛА существует множество промышленных источников радиоизлучений и средств связи, затрудняющих резонансное обнаружение ЛА.
Кроме того, для получения радиолокационных данных (РЛД) о воздушной обстановке, сравнимых по точности измерения угловых координат с радиолокационной станцией (РЛС) сантиметрового диапазона ЭМВ, используемый в резонансной радиолокации метровый (1) диапазон ЭМВ связан с увеличенными размерами антенных систем и требует решения задач уменьшения парусности последних, устойчивости к ветровым нагрузкам и сезонному движению грунтов.
Желательно использовать положительные качества резонансной радиолокации, а именно увеличенную дальность обнаружения ЛА и защиту от антирадарных технологии в интересах повышения производительности обслуживания воздушного движения.
Прототип изобретения
Наиболее близким по назначению и технической сущности к заявленному изобретению относится способ и средства резонансной радиолокации [3].
Согласно [3] известный способ резонансной радиолокации включает зондирование воздушного пространства вероятного местонахождения летательных аппаратов (ЛА) импульсным электромагнитным излучением в диапазоне частот резонансных отражений от ЛА, прием отраженных резонансных эхосигналов, преобразование их в цифровую форму, первичную и вторичную обработку оцифрованных эхосигналов.
При этом из-за повышенной помеховой обстановки в длинноволновом диапазоне ЭМВ диапазон (1) частот рабочих резонансных частот [2] ограничен обнаружением только малогабаритных беспилотных летательных аппаратов (БПЛА). В процессе зондирования и приема радиосигналов применяют последовательное сканирование заданного секторе воздушного пространства узким приемопередающим радиолучом антенны с электромеханическим приводом и/или электронным сканированием. В каждом угловом направлении зондирования проводят непрерывное частотное сканирование на передачу и прием зондирующих сигналов (ЗС) во всем диапазоне резонансных отражений БПЛА от минимального до максимальных значений. В процессе приема отраженных сигналов на текущей частоте и корреляционной обработке сигналов сравнивают амплитуду принятых сигналов с амплитудой сигналов предыдущего частотного зондирования. Решение об обнаружении ЛА принимают по максимальному значению амплитуды принятого сигнала. Для обнаруженного ЛА фиксируют численное значение резонансной длины волны (λрез) и определяют размеры «Lрез» ЛА из условия (1) при λ=λрез. Найденное значение Lрез далее сравнивают с размерами типовых ЛА и принимают решения о типе обнаруженного ЛА по совпадению численного значения Lрез с конкретным эталонным значением «Lэт» ЛА. Одновременно измеряют дальность до ЛА по задержке времени прихода максимального значения сигнала от ЛА относительно момента излучения зондирующего сигнала и измеряют угловое положение (азимут и угол места) ЛА по угловому положению зондирующего луча в момент его резонансного отражения от ЛА.
Недостатки прототипа
Недостатком известного способа резонансной радиолокации является пониженная производительность обзора воздушного пространства из-за последовательного обзора узким лучом и последовательного сканирования несущей частоты в каждом такте обзора по дальности и в каждом направлении зондирования.
Другим недостатком известного способа является трудность резонансного обнаружения ЛА в условиях радиопомех из-за применяемого в [3] алгоритма непрерывного частотного сканирования несущей частотой зондирования и сплошного просмотра всего диапазона резонансных частот БПЛА.
Следующим недостатком известного способа резонансной радиолокации является пониженная дальность обнаружения крупногабаритных аэродинамических ЛА (самолетов, вертолетов), связанная с использованием в [3] только коротковолнового диапазона резонансных отражений (1), характерных для БПЛА.
Пониженная дальность обнаружения крупногабаритных ЛА в данном случае определяется пониженной ЭПР из-за диффузного, а не резонансного отражения ЭМВ от таких ЛА.
Снижение дальности обнаружения крупногабаритных ЛА в свою очередь затрудняет своевременное обнаружения всех типов ЛА, ограничивает время на траекторную обработку параметров их движения, снижают достоверность радиолокационных данных, затрудняют обслуживание и управление воздушным движением ЛА.
В целом указанные технические недостатки известного [3] способа резонансной радиолокации снижают производительность обслуживания воздушного движения ЛА.
Задачей изобретения является повышение производительности резонансной радиолокации по обслуживанию воздушного движения ЛА.
Техническим результатом, обеспечивающим решение этой задачи, является расширение возможностей резонансного обзора воздушного пространства по скорости обзора и количеству обслуживаемых типов ЛА. Сущность изобретения.
Решение поставленной задачи и достижении заявленного технического результата обеспечивается тем, что способ резонансной радиолокации включает зондирование воздушного пространства вероятного местонахождения летательных аппаратов (ЛА) импульсным электромагнитным излучением в диапазоне частот резонансных отражений от ЛА, прием отраженных резонансных эхосигналов, преобразование их в цифровую форму, первичную и вторичную обработку оцифрованных эхосигналов.
Согласно изобретению перед началом зондирования проводят выбор оптимального диапазона Δfopt резонансных частот зондирования, в котором производят поиск частот, свободных от активных помех, их ранжирование в порядке приоритета по близости частот к центральной частоте оптимального диапазона резонансных частот и формирование ранжированного набора Δfрзс частот для резонансного обнаружения аэродинамических и баллистических ЛА, в ранжированной полосе частот выбирают в порядке приоритета две разнесенные между собой по частоте рабочие частоты  и
и  зондирования, достаточные для одновременного обнаружения аэродинамических и баллистических ЛА одновременно по всему сектору обзора воздушного пространства, на одной из выбранных частот формируют длинный зондирующий сигнал (ЗС1) с уменьшенной расходимостью в горизонтальной плоскости для обнаружения ЛА в дальней зоне сектора обзора, на другой частоте - короткий зондирующий сигнал (ЗС2) увеличенной расходимости для обнаружения и разрешения ответных сигналов от ЛА по дальности в ближней зоне сектора обзора, сформированные зондирующие сигналы модулируют по частоте по линейному закону и последовательно излучают их с периодом Т повторения одновременно по всему полю обзора воздушного пространства в виде множества лопатообразных линейно-частотно-модулированных (ЛЧМ) радиолучей, в каждом периоде Т зондирования излучают вначале длинный (τ1) ЛЧМ сигнал ЗС1 и затем с задержкой τзад - короткий (τ2) ЛЧМ сигнал ЗС2, после излучения ЛЧМ сигналов в течение времени радиомолчания передатчиков ЗС на каждом периоде Т производят прием резонансных ЛЧМ эхосигналов (ЭС), отраженных от ЛА, одновременно по всему полю обзора воздушного пространства азимутальным и угломестным приемными каналами, в процессе приема отраженных резонансных эхосигналов принятые сигналы в каждом приемном канале разделяют по частоте
зондирования, достаточные для одновременного обнаружения аэродинамических и баллистических ЛА одновременно по всему сектору обзора воздушного пространства, на одной из выбранных частот формируют длинный зондирующий сигнал (ЗС1) с уменьшенной расходимостью в горизонтальной плоскости для обнаружения ЛА в дальней зоне сектора обзора, на другой частоте - короткий зондирующий сигнал (ЗС2) увеличенной расходимости для обнаружения и разрешения ответных сигналов от ЛА по дальности в ближней зоне сектора обзора, сформированные зондирующие сигналы модулируют по частоте по линейному закону и последовательно излучают их с периодом Т повторения одновременно по всему полю обзора воздушного пространства в виде множества лопатообразных линейно-частотно-модулированных (ЛЧМ) радиолучей, в каждом периоде Т зондирования излучают вначале длинный (τ1) ЛЧМ сигнал ЗС1 и затем с задержкой τзад - короткий (τ2) ЛЧМ сигнал ЗС2, после излучения ЛЧМ сигналов в течение времени радиомолчания передатчиков ЗС на каждом периоде Т производят прием резонансных ЛЧМ эхосигналов (ЭС), отраженных от ЛА, одновременно по всему полю обзора воздушного пространства азимутальным и угломестным приемными каналами, в процессе приема отраженных резонансных эхосигналов принятые сигналы в каждом приемном канале разделяют по частоте  и
и  для параллельной обработки коротких и длинных ЛЧМ ЭС, усиливают их, переносят на промежуточную частоту и преобразуют в цифровую форму, в процессе преобразования сигналов в цифровую форму оцифрованные потоки ЛЧМ ЭС преобразуют в формат представления с плавающей точкой, в процессе первичной обработки оцифрованные ЛЧМ ЭС подвергают квадратурной обработке для уменьшения поляризационных потерь энергии принятых сигналов, сжимают их внутриимпульсной ЛЧМ-обработкой для повышения разрешения отметок от ЛА по дальности, измеряют дальность D до ЛА путем пошагового сдвига по дальности и взаимной корреляционной обработки зондирующего и принятого сигналов и путем регистрации дальности до ЛА по моменту максимума корреляционной функции, одновременно измеряют угловые координаты ЛА по азимуту β и углу места ε путем пошагового сдвига фазы и корреляционной обработки амплитудно-фазового распределения сигналов в азимутальном и угломестном каналах приема и путем регистрации углового направления на ЛА по максимуму взаимной корреляционной функции в соответствующих угловых направлениях, параллельно проводят межпериодное когерентное накопление обработанных сигналов, режекцию пассивных помех и пороговую обработку сигналов для выделения сигналов от ЛА на фоне помех, сигналы от ЛА, прошедшие пороговую обработку, фильтруют по доплеровской частоте и определяют радиальную (Vr) скорость ЛА по частоте Доплера, соответствующей максимальному значению амплитуды сигнала, найденные значения Vr, D, β, ε для каждого ЛА в виде многоразрядных последовательностей цифровых сигналов передают на вторичную обработку, а в процессе вторичной обработки оцифрованных эхосигналов проводят их идентификацию, привязку к сигналам ЛА в соответствующих разрядах их цифровых последовательностей идентификационных адресов и сигналов единого времени, рассчитывают траекторию и курсовую скорость Vк движения каждого ЛА, сравнивают найденные параметры движения ЛА с банком данных параметров типовых ЛА и по результатам их совпадения принимают решение о распознавании конкретного типа ЛА и параметров их движения, результаты траекторной обработки отображают на мониторе и в масштабе единого времени передают внешнему пользователю радиолокационной информации в виде цифрового потока радиолокационных данных (РЛД).
для параллельной обработки коротких и длинных ЛЧМ ЭС, усиливают их, переносят на промежуточную частоту и преобразуют в цифровую форму, в процессе преобразования сигналов в цифровую форму оцифрованные потоки ЛЧМ ЭС преобразуют в формат представления с плавающей точкой, в процессе первичной обработки оцифрованные ЛЧМ ЭС подвергают квадратурной обработке для уменьшения поляризационных потерь энергии принятых сигналов, сжимают их внутриимпульсной ЛЧМ-обработкой для повышения разрешения отметок от ЛА по дальности, измеряют дальность D до ЛА путем пошагового сдвига по дальности и взаимной корреляционной обработки зондирующего и принятого сигналов и путем регистрации дальности до ЛА по моменту максимума корреляционной функции, одновременно измеряют угловые координаты ЛА по азимуту β и углу места ε путем пошагового сдвига фазы и корреляционной обработки амплитудно-фазового распределения сигналов в азимутальном и угломестном каналах приема и путем регистрации углового направления на ЛА по максимуму взаимной корреляционной функции в соответствующих угловых направлениях, параллельно проводят межпериодное когерентное накопление обработанных сигналов, режекцию пассивных помех и пороговую обработку сигналов для выделения сигналов от ЛА на фоне помех, сигналы от ЛА, прошедшие пороговую обработку, фильтруют по доплеровской частоте и определяют радиальную (Vr) скорость ЛА по частоте Доплера, соответствующей максимальному значению амплитуды сигнала, найденные значения Vr, D, β, ε для каждого ЛА в виде многоразрядных последовательностей цифровых сигналов передают на вторичную обработку, а в процессе вторичной обработки оцифрованных эхосигналов проводят их идентификацию, привязку к сигналам ЛА в соответствующих разрядах их цифровых последовательностей идентификационных адресов и сигналов единого времени, рассчитывают траекторию и курсовую скорость Vк движения каждого ЛА, сравнивают найденные параметры движения ЛА с банком данных параметров типовых ЛА и по результатам их совпадения принимают решение о распознавании конкретного типа ЛА и параметров их движения, результаты траекторной обработки отображают на мониторе и в масштабе единого времени передают внешнему пользователю радиолокационной информации в виде цифрового потока радиолокационных данных (РЛД).
Выбор оптимального диапазона Δfopt резонансных частот зондирования позволяет исключить необходимость просмотра диапазона резонансных частот для каждого габарита обслуживаемых ЛА в отдельности и ограничиться частотным пересечением этих диапазонов, в котором резонансная ЭПР для всех обслуживаемых ЛА не ниже заданного значения для обнаружения их в дальней зоне обнаружения. Следствием этого является уменьшение времени на частотный обзор обслуживаемого углового сектора воздушного пространства.
Предварительный (перед началом зондирования) поиск в выбранном оптимальном диапазоне Δfopt несущих частот, свободных от активных помех, их ранжирование в порядке приоритета по близости частот к центральной частоте оптимального диапазона резонансных частот и формирование ранжированного диапазона Δfрзс частот для резонансного обнаружения аэродинамических и баллистических ЛА дополнительно позволяют исключить потери времени на отстройку несущих частот от помех в процессе приема сигналов и обеспечить быстрый переход на свободную несущую частоту зондирования, рациональную с точки зрения достаточности ЭПР для обслуживания ЛА, при появлении заградительных или промышленных активных помех на частоте зондирования.
Выбор в ранжированном диапазоне Δfрзс частот в порядке приоритета по ЭПР двух разнесенных между собой по частоте рабочих частот  и
и  зондирования, достаточных для одновременного обнаружения аэродинамических (авиационных) и баллистических ЛА одновременно по всему сектору обзора воздушного пространства, позволяет, с одной стороны, исключить необходимость частотного сканирования несущей частотой зондирования и, с другой, - обеспечить параллельный прием и первичную обработку сигналов от двух видов ЛА, резко отличающихся по своим скоростным параметрам и траектории полета.
зондирования, достаточных для одновременного обнаружения аэродинамических (авиационных) и баллистических ЛА одновременно по всему сектору обзора воздушного пространства, позволяет, с одной стороны, исключить необходимость частотного сканирования несущей частотой зондирования и, с другой, - обеспечить параллельный прием и первичную обработку сигналов от двух видов ЛА, резко отличающихся по своим скоростным параметрам и траектории полета.
В целом указанные технические преимущества, а также параллельный прием, оцифровка и обработка резонансных эхосигналов одновременно по всему полю зондирования воздушного пространства позволяют по сравнению с прототипом расширить возможности резонансного обзора воздушного пространства по скорости обзора и количеству обслуживаемых типов ЛА.
Следствием этого является резкое сокращение затрат времени на резонансное обнаружение и обработку эхосигналов ЛА и повышение производительности резонансной радиолокации по обслуживанию воздушного движения ЛА.
Сущность изобретения поясняется чертежами, представленными на фиг. 1 - фиг. 6.
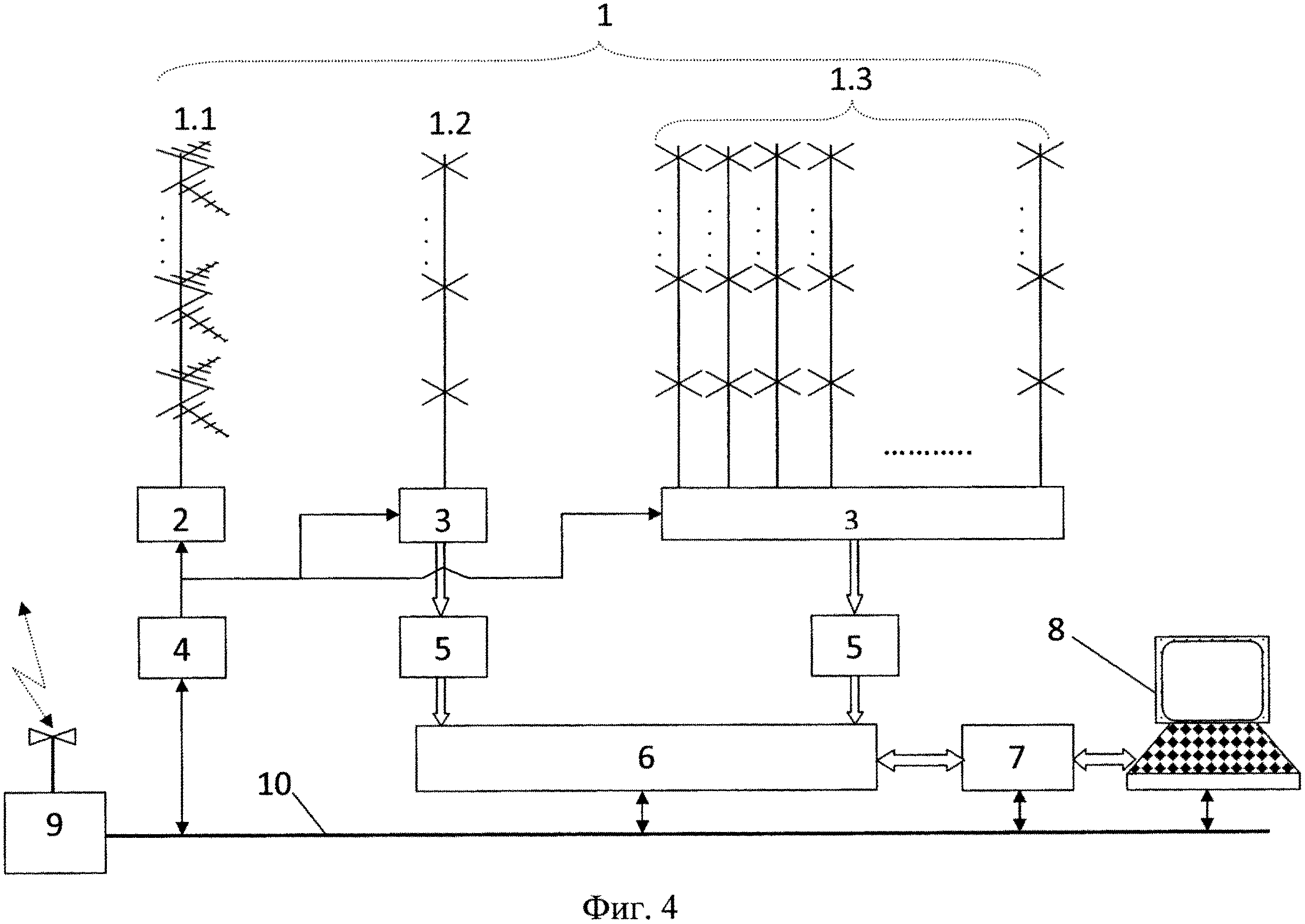
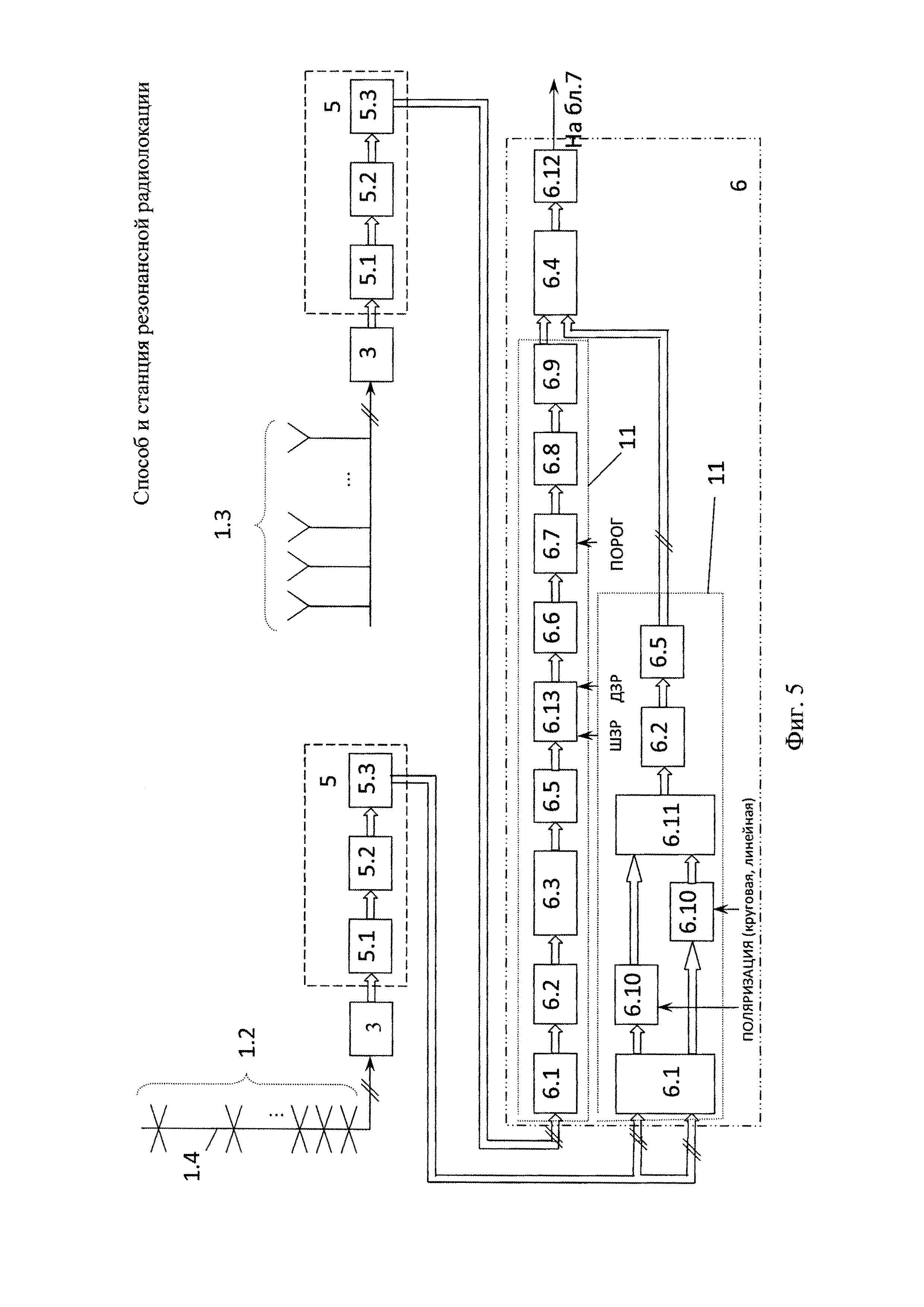
На фиг. 1 представлена зависимость амплитуды U отраженного зондирующего сигнала (ЗС) от геометрических размеров L летательного аппарата и условие резонанса при фиксированной частоте ЗС, на фиг. 2 - зависимость численного значения σ резонансной ЭПР от частоты ЗС для аэродинамических (авиационных) и баллистических ЛА, на фиг. 3 - известная [2] зависимость численного значения σ малогабаритного (L=единицы-десятки см) беспилотного ЛА от частоты ЗС, на фиг. 4 - пример функциональной схемы станции, реализующей предложенный способ резонансной радиолокации, на фиг. 5 - схема приема и алгоритма первичной обработки резонансных эхосигналов.
На фиг. 1-6 обозначены:
1 - антенная система;
1.1 - передающее антенно-фидерное устройство (АФУ);
1.2 - угломестное приемное АФУ;
1.3 - азимутальное приемное АФУ;
2 - многоканальный усилитель зондирующих сигналов (ЗС);
3 - многоканальный приемник (ПРМ) ответных резонансных эхосигналов;
4 - двухчастотный генератор длинных и коротких линейно-частотно-модулированных (ЛЧМ) ЗС с возможностью перестройки их несущих частот;
5 - устройство аналого-цифрового преобразования и квадратурной демодуляции ЭС;
5.1 - аналого-цифровой преобразователь (АЦП);
5.2 - квадратурный демодулятор (КД);
5.3 - блок передачи оцифрованных ЭС;
6 - устройство первичной обработки ЭС;
6.1 - блок приема оцифрованных ЭС;
6.2 - блок внутриимпульсной обработки (ВИО) и сжатия ЛЧМ - ЭС;
6.3 - блок цифрового диаграммообразования по азимуту (ЦФДНА);
6.4 - блок цифрового диаграммообразования по углу места (ЦФДНУ);
6.5 - блок когерентного накопления (КН);
6.6 - детектор (Д);
6.7 - блок пороговой обработки (ПОР);
6.8 - блок формирования сигнальных отметок (СО);
6.9 - блок подавления боковых лепестков по дальности и азимуту β;
6.10 - цифровой фильтр (ЦФ);
6.11 - сумматор;
6.12 - блок формирования координатных точек (КТ) ЛА;
6.13 - блок режекции пассивных помех по азимуту (ширина зоны режекции-ШЗР) и дальности зоны режекции (ДЗР);
7 - устройство вторичной обработки ЭС;
8 - автоматизированное рабочее место (АРМ) оператора РЛС;
9 - аппаратура приема/передачи данных (АПД) и команд управления резонансной РЛС;
10 - двунаправленная активная шина сопряжения (ШС).
Предложенный способ и станция резонансной радиолокации основаны на известном [4] явлении резонанса, представленном на фиг. 1. Согласно [4] при размерах «L» ЛА, близких к полуволновому вибратору (L=λ/2), численное резонансной амплитуды Uрез отраженного ЗС (эхосигнала - ЭС) резко возрастает (фиг. 1). При этом численное значения ЭПР (σ=σ(Uрез)) в условиях резонанса (1) более чем в 10 раз превышает ЭПР при диффузном отражением ЗС. Экспериментальная оценка численного значения σ=σ(Uрез) в зависимости от несущей частоты «f» ЗС с линейно-частотной модуляцией (ЛЧМ) для трех основных видов крупноразмерных аэродинамических (авиационных) и баллистических ЛА с размерами L1, L2 и L3 соответственно представлена на фиг. 2.
Из фиг. 2 видно, что в отличие от известного [3] способа резонансной радиолокации для обнаружения ЛА с σ≥3 м2 нет необходимости менять несущую частоту ЗС во всем спектре (фиг. 3) резонансных отражений каждого ЛА в отдельности. Для этого достаточно ограничиться одной несущей частотой f1, лежащей в полосе частот Δfopt (фиг. 2), общей для аэродинамических (авиационных) и баллистических ЛА.
Вместе с тем для увеличения производительности в предложенном способе резонансной радиолокации применена параллельная локация одновременно на двух несущих частотах f1 и f2 с возможностью их перестройки в диапазоне Δfopt. Необходимость такой перестройки связана с работой в указанном диапазоне множества радиостанций и средств радиосвязи с перестройкой частоты. Поэтому для обеспечения работоспособности резонансной радиолокации в условиях помех в предложенном способе перед началом зондирования и периодически в процессе обработки ответных резонансных эхосигналов в диапазоне Δfopt производят частотное сканирование (на прием) выделенного сектора воздушного пространства на предмет выявления источников помех, отбора и ранжирования частот ЗС, свободных от помех в реальном масштабе времени.
С учетом изложенного оптимальное значение диапазона частот Δfopt резонансной радиолокации выбирают из условия минимума пересечения областей резонансных отражений на уровне ЭПР не менее заданного значения, например 3 м2:
 где:
где:
 - пересечение частотных областей
- пересечение частотных областей  всех I-х типов ЛА;
всех I-х типов ЛА;
 - резонансная полоса частот i-го типа ЛА;
- резонансная полоса частот i-го типа ЛА;
- σi - минимально допустимое резонансное значение ЭПР для обнаружения i-го типа ЛА;
- i, I - текущее и максимальное значение типов обслуживаемых ЛА соответственно.
Вариант станции, реализующей предложенный способ резонансной радиолокации, представлен на фиг. 4.
Согласно фиг. 4 станция резонансной радиолокации содержит установленные на антенных опорах [5-7] не менее одного передающего и не менее двух приемных азимутальных и угломестных антенно-фидерных устройств (АФУ) для многолучевого зондирования воздушного пространства на частотах резонирования летательных аппаратов (ЛА) и приема на этих частотах отраженных резонансных эхосигналов и сигналов радиопомех. Вход передающего АФУ 1.1 через многоканальный усилитель 2 мощности соединен с выходом двухчастотного генератора 4 линейно-частотно-модулированных (ЛЧМ) зондирующих сигналов (ЗС) увеличенной и короткой длительности с возможностью перестройки несущей частоты в диапазоне частот (2) резонирования аэродинамических и баллистических ЛА. Сигнальные выходы приемных АФУ 1.2 и 1.3 соединены с входами приемных супергетеродинных устройств соответствующих многоканальных приемников (ПРМ) 3. Опорные входы ПРМ 3 соединены с выходом двухчастотного генератора 4 ЗС, а сигнальные выходы ПРМ 3 - через устройство 5 аналого-цифрового преобразования и квадратурной демодуляции ЭС и через устройства первичной 6 и вторичной 7 обработки ЭС - с автоматизированным рабочим местом (АРМ) 8 оператора станции. Сигнальные и управляющие выходы АРМ 8 через двунаправленную активную шину 10 сопряжения соединены с управляющими входами генератора 4 ЗС, устройств первичной 6 и вторичной 7 обработки резонансных ЭС и через аппаратуру 9 приема/передачи данных (АПД) - с внешними потребителями радиолокационной информации. 12. Устройство аналого-цифрового преобразования и квадратурной демодуляции ЭС содержит последовательно соединенные аналого-цифровой преобразователь (АЦП) 5.1, квадратурный демодулятор (КД) 5.2 и блок 5.3 передачи оцифрованных ЭС. Блок первичной обработки эхосигналов выполнен с возможностью параллельной обработки оцифрованных ЭС с азимутального и угломестного АФУ и содержит азимутальный 11 и угломестный 12 каналы первичной обработки, соединенные через блок 6.4 цифрового диаграммообразования по углу места и блок 6.12 формирования координатных точек ЛА с выходом блока 6 первичной обработки ЭС. При этом азимутальный канал 11 первичной обработки ЭС содержит последовательно соединенные блок 6.1 приема оцифрованных ЭС, блок 6.2 внутриимпульсной обработки и сжатия ЛЧМ ЭС, блок 6.3 цифрового диаграммообразования по азимуту (ЦФДНА), блок 6.5 когерентного накопления, блок 6.13 режекции пассивных помех по азимуту и дальности, детектор 6.6, блок 6.7 пороговой обработки, блок 6.8 формирования сигнальных отметок и блок 6.9 подавления боковых лепестков по дальности и азимуту. Угломестный канал 12 первичной обработки содержит последовательно соединенные блок 6.1 приема оцифрованных ЭС с ортогональной поляризацией от АФУ 1.2, схему восстановления амплитуды и поляризации ЭС, включающую два цифровых фильтра 6.10 и сумматор 6.11, блок 6.2 внутриимпульсной обработки и сжатия ЛЧМ ЭС и блок 6.5 когерентного накопления. Блок 6 первичной обработки эхосигналов выполнен модульной конструкции на программируемых логических интегральных схемах (ПЛИС) с перепрограммируемой памятью и дополнительно содержит соединенные интерфейсными линиями связи центральный процессор управления и передачи данных, ведущий и ведомый блок цифровой обработки длинных и коротких ЭС, синхронизатор и вводно-выводное устройство (на фигурах не показано). Блок 8 вторичной обработки эхосигналов выполнен по стандартной схеме промышленной электронно-вычислительной машины на двух безоболочных компьютерах серии Core i7 и двух расширителях - мезонинах серии 4×1 Gbit Ethernet и 4×RS422 с блоком перепрограммируемых Gard и Flesh памяти. 15.
Антенные опоры [5-6] АФУ 1.1-1.3 выполнены быстро возводимыми [7-8] и устойчивыми к ветровым нагрузкам и сезонному движению грунтов. Они содержат не менее одной несущей мачты 1.4, установленной на металлических балках - линейном ростверке, объединяющем верхние торцы металлических винтовых свай (на фигурах не показано). Каждая винтовая свая [5-6] выполнена в виде трубы с изолирующим незамерзающим покрытием на основе полимера и винтовым рабочим органом, закрепленным на ее нижнем торце для жесткого крепления нижнего конца сваи в твердом грунте ниже уровня его сезонного оттаивания.
В соответствии с предложенным способом перед началом зондирования в рассчитанном (2) оптимальном диапазоне частот Δfopt резонансной радиолокации производят поиск частот, свободных от активных помех, путем изменения по заданной с АРМ 8 программе частотного обзора воздушного пространства одной из несущей (опорной) частоты генератора 4. При этом высокочастотные сигналы с изменяемой текущей  частотой, подаваемые на опорные входы супергетеродинных приемников ПРМ 3, позволяют принять с азимутальной 1.3 и угломестной 1.2 АФУ текущие значения частот fn, занятых активными помехами, определить угловые направления постановщиков помех и сформировать ранжированный набор (диапазон) Δfрзс частот, свободных от помех, для резонансного зондирования аэродинамических и баллистических ЛА.
частотой, подаваемые на опорные входы супергетеродинных приемников ПРМ 3, позволяют принять с азимутальной 1.3 и угломестной 1.2 АФУ текущие значения частот fn, занятых активными помехами, определить угловые направления постановщиков помех и сформировать ранжированный набор (диапазон) Δfрзс частот, свободных от помех, для резонансного зондирования аэродинамических и баллистических ЛА.
Формирование на множестве (2) ранжированного набора Δfрзс частот, свободных от помех, для резонансного зондирования аэродинамических и баллистических ЛА производят из условий:



где:
Δfn - текущее значение диапазона резонансных частот, занятых активными помехами;
fjрез - j-я частота зондирующих сигналов, свободная от помех в текущий момент времени;
fn - n-я помеховая частота в оптимальной полосе резонансных частот Δfopt;
j, J - текущий номер ранга частоты, характеризующего степень ее близости к центру Δfopt, и общее число рангов соответственно;
n, N - текущий номер помеховой частоты и общее количество помеховых частот в полосе резонансных частот Δfopt.
После формирования ранжированного набора Δfрзс зондирующих частот на оптимальной полосе Δfopt частот найденное значение Δfрзс в графическом и табличном виде отображается на мониторе АРМ 8 оператора радиолокационной станции (РЛС).
Оператор АРМ 8 в порядке приоритета выбирает две разнесенные между собой по частоте рабочие частоты  и зондирования, достаточные для одновременного обнаружения аэродинамических и баллистических ЛА одновременно по всему сектору обзора воздушного пространства. Переход на другие рабочие частоты f1 и f2 зондирования в диапазоне Δfрзс производится автоматически по мере появления на рабочих частотах постановщиков помех.
и зондирования, достаточные для одновременного обнаружения аэродинамических и баллистических ЛА одновременно по всему сектору обзора воздушного пространства. Переход на другие рабочие частоты f1 и f2 зондирования в диапазоне Δfрзс производится автоматически по мере появления на рабочих частотах постановщиков помех.
Далее на текущей частоте f1 в генераторе 4 формируется длинный зондирующий сигнал (ЗС1) с уменьшенной расходимостью в вертикальной плоскости для обнаружения ЛА в дальней зоне сектора обзора, на другой частоте f2 - короткий зондирующий сигнал (ЗС2) увеличенной расходимости для обнаружения и разрешения ответных сигналов от ЛА по дальности в ближней зоне сектора обзора.
Сформированные зондирующие сигналы ЗС1 и ЗС2 модулируют по частоте по линейному закону, разветвляют на множество усилительных каналов усилителя 2 мощности. В усилителе 2 зондирующие сигналы ЗС1 и ЗС2 усиливаются по мощности. В процессе усиления ЗС1 в отдельные усилительные каналы усилителя 2 вводится фазовый сдвиг на 180° для уменьшения расходимости радиолуча передающего АФУ 1.1 в вертикальной плоскости.
Усиленные ЗС1 и ЗС2 излучаются логопериодическими антеннами (ЛПА) АФУ 1.1 с периодом Τ повторения одновременно по всему полю обзора воздушного пространства в виде множества лопатообразных линейно-частотно-модулированных (ЛЧМ) радиолучей. В каждом периоде Τ зондирования ЛПА АФУ 1.1 излучают вначале длинный (τ1) ЛЧМ сигнал ЗС1 с узкой Δεy≈45° (в вертикальной плоскости относительно линии горизонта) диаграммой направленности и затем с задержкой τзад - короткий (τ2) ЛЧМ сигнал ЗС2 с широкой Δεш≥90° (в вертикальной плоскости относительно линии горизонта) диаграммой направленности.
При этом для уменьшения поляризационных, информационных и энергетических потерь плоскости лопатообразных лучей соседних ЛПА АФУ 1.1 развернуты относительно друг к друга и к горизонту под углом 45°, а угловые размеры Δβ лучей каждой ЛПА в азимутальной плоскости при излучении как длинных, так и коротких ЗС, выбраны одинаковыми и составляют Δβ=90-120°.
Численные значения периода Τ следования зондирующих ЛЧМ сигналов, расходимость Δεу и длительность τ1 первого зондирующего ЛЧМ сигнала ЗС1 выбирают из условия обнаружения ЛА на максимальной дальности Dmax длинным (τ1) зондирующим сигналом с узкой Δεy в угломестной - плоскости диаграммой его направленности:


где:
с=3×108 км/с - скорость распространения электромагнитных волн;
Рзс1 - плотность мощности первого (ЗС1) зондирующего ЛЧМ импульса увеличенной длительности;
Δεy, Δβ - суммарный угол рассеивания излучения ЗС1 в резонансном диапазоне ЭМВ в угломестной и азимутальной плоскости соответственно;
σ=3 м - минимальный размер ЭПР при резонансном отражении ЗС1;
Emin=10-13 Дж/см2 - чувствительность приемных устройств.
Длительность τ2 второго зондирующего ЛЧМ сигнала ЗС2 и его временную задержку Δτ относительно ЗС1 выбирают из условий возможности разрешения эхосигналов по дальности и раздельного Δrmin наблюдения ЛА в каждом угловом направлении:

где:
tпер - длительность переходных процессов в передающем тракте после излучения первого ЗС 1.
После излучения ЛЧМ сигналов ЗС1 и ЗС2 в течение времени радиомолчания усилителя 2 мощности на каждом периоде Т производят прием резонансных ЛЧМ эхосигналов ЭС1 и ЭС2, отраженных от ЛА, на несущих текущих частотах f1 и f2 соответственно. Прием ЭС1 и ЭС2 ведут одновременно всеми приемными элементами (крестообразными вибраторами Надененко) угломестной АФУ 1.2 и азимутальной АФУ 1.3 и одновременно по всему полю обзора воздушного пространства. Принятые амплитудно-фазовые распределения ЭС1 и ЭС2 на раскрыве АФУ 1.2 и АФУ 1.3 передаются на соответствующие многоканальные супергетеродинные приемники 3. В процессе приема отраженных резонансных эхосигналов принятые сигналы в каждом приемном канале разделяют по частоте f1 и f2 для параллельной обработки коротких и длинных ЛЧМ ЭС. Принятые ЭС1 и ЭС2 в приемниках 3 усиливают и переносят на промежуточную частоту. Далее потоки этих сигналов в устройствах 5 азимутального и угломестного приемных каналов оцифровывают, преобразуют в формат представления с плавающей точкой. Далее для уменьшения поляризационных потерь энергии принятых сигналов оцифрованные ЛЧМ ЭС подвергают квадратурной обработке и передают в устройство 6 для первичной обработки ЭС. Для повышения степени разрешения отметок от ЛА по дальности в блоках 6.2 азимутального и угломестного каналов приема ЛЧМ ЭС сжимают путем их внутриимпульсной обработки (ВИО). Перед сжатием ЛЧМ ЭС угломестном канале приема производят (блоки 6.10 и 6.11) восстановление амплитуды и фазы ЛЧМ ЭС, принятых крестообразными антенными с ортогональной поляризацией. Измерение дальности «D» до ЛА в устройстве 6 осуществляют путем пошагового сдвига по дальности, взаимной корреляционной обработки зондирующего и принятого сигналов и регистрации дальности до ЛА по моменту максимума корреляционной функции (на фигурах не показано). Далее в блоках 6.3 ЦФДНА и 6.4 ЦФДНУ устройства 6 измеряют угловые координаты ЛА по азимуту «β» и углу места «ε» соответственно путем пошагового сдвига фазы и корреляционной обработки амплитудно-фазового распределения сигналов в азимутальном и угломестном каналах приема и путем регистрации углового направления на ЛА по максимуму взаимной корреляционной функции в соответствующих угловых направлениях. В блоках 6.5 обоих приемных каналов проводят межпериодное когерентное накопление обработанных сигналов. В азимутальном приемном канале дополнительно проводят (блок 6.13) режекцию пассивных помех путем ограничения зоны обзора (сужения объема сигнальной обработки) по азимуту (ШЗР) и дальности (ДЗР), детектирование (блок 6.6) и пороговую обработку (блок 6.7) для выделения сигналов от ЛА на фоне помех. Сигналы от ЛА, прошедшие пороговую обработку, фильтруют в блоке 6.8 по множеству допустимых частот и определяют радиальную (Vr) скорость ЛА по частоте Доплера, соответствующей максимальному значению амплитуды сигнала. Затем в блоке 6.9 азимутального канала обработки цифровых сигналов осуществляется подавление боковых лепестков и ложных сигналов по дальности и азимуту. При измерении углового ε положения ЛА в блоке 6.4 ЦФДНУ дополнительно используют данные амплитудно фазового распределения в угломестной плоскости с азимутального АФУ 1.3. Далее в блоке 6.12 производится формирование координатных точек (Vr, D, β, ε) ЛА.
В процессе формирования координатных точек (Vr, D, β, ε) используют топоцентрическую систему координат, при которой центр координат располагают в точке О вблизи поверхности Земли с геодезическими координатами В - широта, L - долгота, Η - высота, оси x и y которых расположены в плоскости, параллельной касательной плоскости к поверхности эллипсоида Красовского, проходящей через точку О, а ось z направлена перпендикулярно плоскости координат x и y в направлении возрастания высоты.
Найденные (в процессе первичной обработки ЭС) значения Vr, D, β, ε для каждого ЛА передают на вторичную обработку ЭС.
В процессе вторичной обработки оцифрованных эхосигналов в устройстве 7 проводят идентификацию координатных точек (Vr, D, β, ε), привязку к ним в соответствующих разрядах их цифровых последовательностей идентификационных адресов и сигналов единого времени. Далее по результатам межпериодных измерений (с фиксированным временным шагом) координатных точек рассчитывают траекторию и курсовую скорость Vк движения каждого ЛА.
Численное значение курсовой скорости Vк движения ЛА определяют из выражений:

где:
Vr, Vβ - радиальная скорость ЛА и скорость его перемещения по азимуту соответственно;
с - скорость света;
FД - частота Доплера;
λ - длина волны соответствующего ЭС;
fi - частота излучения соответствующего ЗС;
δβ - приращение значения координаты азимута ЛА за установленный интервал времени Δt;
Δt - интервал дискретизации по времени измерений.
Найденные в (9) траекторные параметры движения ЛА сравнивают с банком данных параметров типовых ЛА и по результатам их совпадения принимают решение о распознавании конкретного типа ЛА и параметров их движения.
Периодически в процессе первичной и вторичной обработки эхосигналов проводят анализ помеховой обстановки и корректировку ранжированного набора Δfрзс частот для резонансного зондирования аэродинамических и баллистических ЛА. При появлении прицельной или случайной активной помехи на текущей рабочей частоте  или
или  производят перевод указанных рабочих частот на частоты, ближайшие по рангу их расположения в откорректированной полосе резонансных частот Δfрзс, свободных от радиопомех.
производят перевод указанных рабочих частот на частоты, ближайшие по рангу их расположения в откорректированной полосе резонансных частот Δfрзс, свободных от радиопомех.
Одновременно результаты траекторной обработки сигналов отображают на мониторе и в масштабе единого времени передают (блок 9) внешнему пользователю радиолокационной информации в виде цифрового потока радиолокационных данных (РЛД).
Изобретение не ограничивается описанным примером его осуществления. В рамках данного изобретения возможны и другие варианты его осуществления, не выходящие за пределы независимых пунктов изобретения.
В частности, для кругового обзора воздушного пространства в резонансной станции может быть использовано несколько стационарных антенных систем 1, расположенных по сторонам правильного многоугольника. Для одновременного кругового обзора воздушного пространства их передающие и приемные устройства могу быть разнесены по несущей частоте в частотной области оптимального резонансного зондирования. Устройство 6 и 7 первичной и вторичной обработки резонансных эхосигналов могут быть выполнены на базе промышленных электронно-вычислительных машин (ЭВМ) с встроенными в их память программами обработки резонансных эхосигналов и обмена информацией между элементами станции и внешней средой.
Изобретение разработано на уровне опытного образца станции резонансной радиолокации и антенных систем 1 для нее в метровом диапазоне электромагнитных волн. Испытания опытного образца показали достижение заявленного технического результата и решение поставленной задачи. Готовится промышленное освоение станции под товарной маркой «Резонанс-Η» и «Резонанс-НЭ» в зависимости от ее конкретной элементной комплектации.
Источники информации
1. Structure resonant radar detection apparatus and method. US 4897660, 14.01.1986.
2. Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания. - М.: Радио и связь, 1984, с. 79, рис. 3-21.
3. Радиолокационный способ обнаружения малозаметных беспилотных летательных аппаратов. RU 2534217, 27.11.2014.
4. Теоретические основы радиолокации. / Под ред. Я.Д. Ширмана. М.: Советское радио, 1970, 560 с.
5. Антенная опора для приемной фазированной антенной решетки радиолокатора «Резонанс». ЗАО НИЦ "РЕЗОНАНС". RU 154296, 23.07.2015.
6. Многосвайный фундамент и способ его возведения на мерзлых грунтах. ЗАО НИЦ "РЕЗОНАНС". RU 2015104077, 2016.
7. Опорно-распорный соединительный элемент. RU 160098, ЗАО НИЦ "РЕЗОНАНС". 2016.
8. Подъемник антенной опоры. ООО «ИСТ». RU 2015152360, 2016.












Способ радиолокационного определения времени окончания активного участка баллистической траектории
Способ радиолокационного обнаружения маневра баллистической цели на пассивном участке траектории
Способ определения модуля скорости аэродинамической цели
Способ определения скорости движущихся объектов методом пассивной локации
Многосвайный фундамент и способ его возведения на мерзлых грунтах
Антенная опора башенного типа
Способ пассивной дистанционной телевизионной идентификации объектов и устройство для его осуществления
Способ радиолокационного определения модуля скорости баллистического объекта
Обнаружитель маневра баллистической ракеты по фиксированной выборке квадратов дальности
Способ и устройство определения курса неманеврирующей аэродинамической цели с использованием выборки квадратов дальности
Способ радиолокационного определения времени окончания активного участка баллистической траектории
Способ радиолокационного обнаружения маневра баллистической цели на пассивном участке траектории
Способ определения модуля скорости аэродинамической цели
Способ определения скорости движущихся объектов методом пассивной локации
Многосвайный фундамент и способ его возведения на мерзлых грунтах
Антенная опора башенного типа
Способ пассивной дистанционной телевизионной идентификации объектов и устройство для его осуществления
Способ радиолокационного определения модуля скорости баллистического объекта
Обнаружитель маневра баллистической ракеты по фиксированной выборке квадратов дальности
Способ и устройство определения курса неманеврирующей аэродинамической цели с использованием выборки квадратов дальности

