Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ БЫСТРОДЕЙСТВИЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к области автоматизированных систем управления технологическими процессами (АСУ ТП), в частности для диагностики систем автоматического управления (САУ).
Существуют системы автоматического управления компрессорным цехом и газоперекачивающими агрегатами. Одна из основных характеристик работы данных систем – их быстродействие. Увеличение времени быстродействия является главным предупреждающим критерием определения работоспособности АСУ ТП. При поиске неисправностей в таких схемах приходится проверять быстродействие их работы и сравнивать его с паспортными данными.
Известен способ определения быстродействия электроизмерительных приборов, который заключается в том, что на вход прибора подают прямоугольные периодические импульсы с длительностью, равной половине периода, и с уровнями, соответствующими начальной и конечной отметкам шкалы прибора [1]. Недостатками данного способа являются:
- невозможность непрерывного определения быстродействия работы прибора (системы);
- применение дополнительных устройств для определения быстродействия работы прибора (системы).
Задачей полезной модели является повышение надежности работы систем автоматического управления.
Технический результат - непрерывное определение быстродействия систем автоматического управления.
Поставленная задача решается, а технический результат достигается тем, что в системах автоматического управления, содержащих контроллер, модули входных сигналов (сигналов с датчиков), модули выходных сигналов (сигналы управления исполнительными механизмами) и частотные модули (преобразователи частоты) путем установки электрического проводника (перемычки) соединяют между собой один резервный выход модуля выходных дискретных сигналов, один резервный вход модуля входных дискретных сигналов, и один резервный вход частотного модуля, изменяют алгоритм работы контроллера таким образом, что с резервного выхода модуля выходных сигналов подается логическая единица на резервный вход модуля входных сигналов, при обнаружении единицы на резервном входе модуля входных дискретных сигналов, контроллер инвертирует сигнал на резервном выходе модуля выходных дискретных сигналов в логический ноль, при обнаружении на резервном входе модуля входных дискретных сигналов нуля, инвертирует его на выходном модуле дискретных сигналов обратно в единицу, повторяя данный цикл непрерывно, частотный модуль определяет частоту сигнала, используя которую, через формулу рассчитывает быстродействие работы системы.
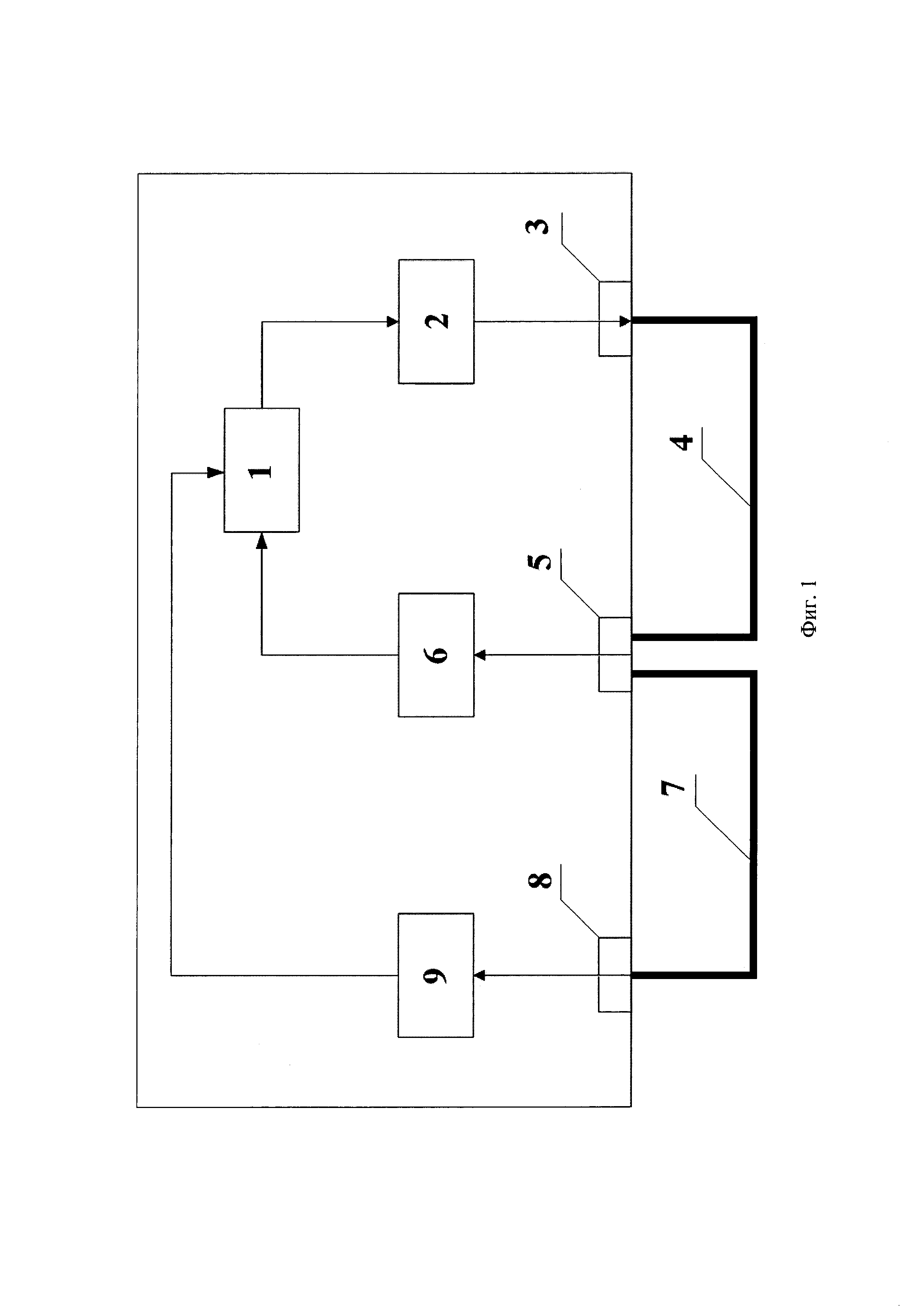
На фигуре 1 представлена структурная схема САУ.
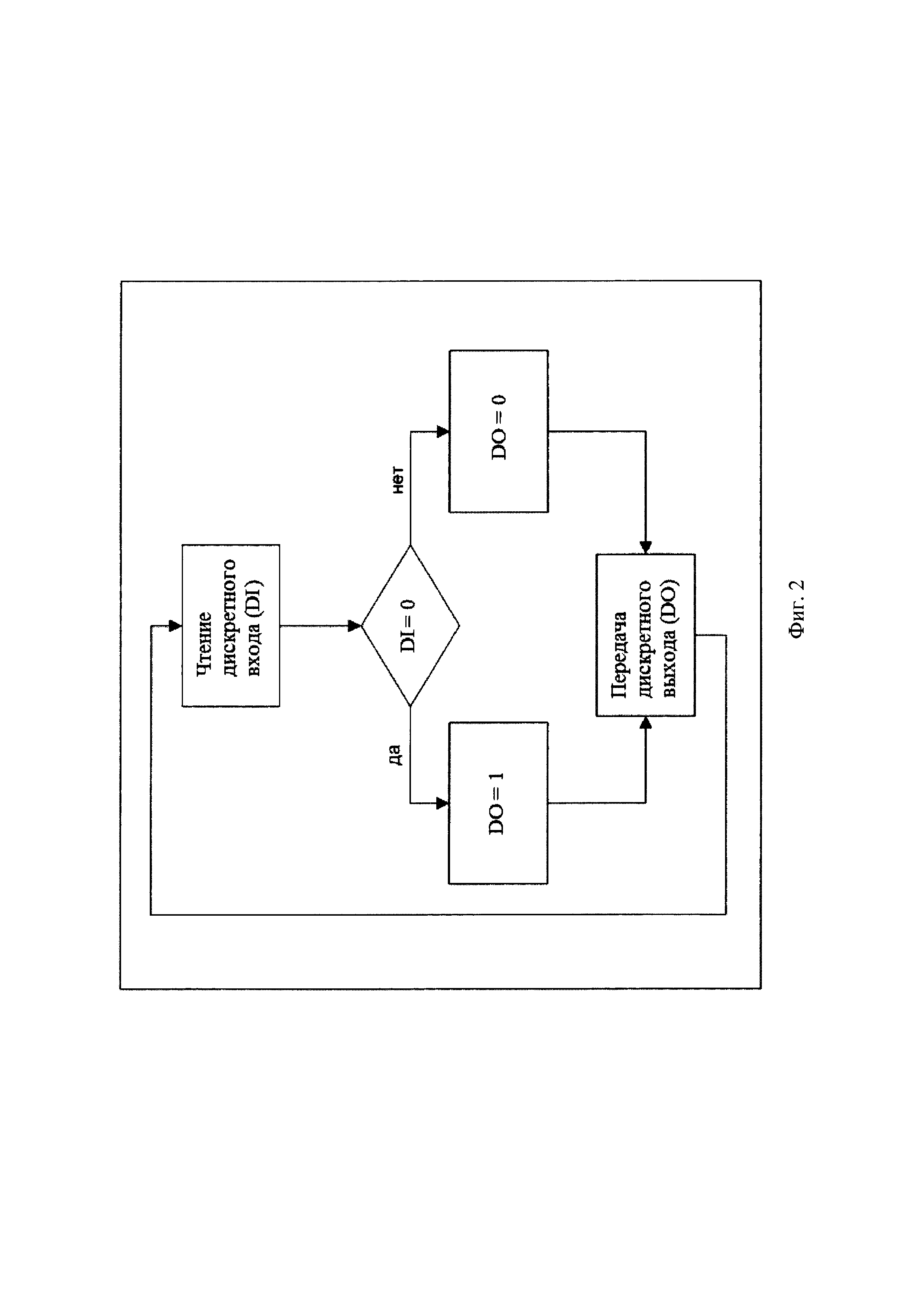
На фигуре 2 представлена блок-схема алгоритма определения быстродействия САУ.
Контроллер 1 в соответствии с заданным алгоритмом работы, подает логическую единицу (например, путем замыкания реле и появлением на выходе напряжения 24 В) через резервный выход модуля выходных дискретных сигналов DO («discrete output» [дискретный выход. - англ.]) 2, клеммный соединитель 3, перемычку 4 и клеммный соединитель 5 на модуль входных дискретных сигналов DI («discrete input» [дискретный вход. - англ.]) 6. При обнаружении единицы на резервном входе модуля входных дискретных сигналов 6, контроллер 1, в соответствии с заданным алгоритмом работы, инвертирует сигнал в логический ноль и передает его через резервный выход модуля выходных дискретных сигналов 2 через резервный выход модуля выходных дискретных сигналов 6. При обнаружении нуля на резервном входе модуля входных дискретных сигналов 6, контроллер 1, в соответствии с заданным алгоритмом работы, инвертирует сигнал в логическую единицу, повторяя непрерывно данный цикл. Преобразователь частоты 9 через клеммный соединитель 8 и перемычку 7, принимает получившийся частотный сигнал.
На фигуре 3 представлен график частотного (периодического сигнала) прямоугольной формы (меандра) с постоянной амплитудой, поступающего на преобразователь частоты для дальнейшего расчета быстродействия системы, где по оси ординат отложено напряжение Un на выходе коммутируемого резервного выхода модуля выходных дискретных сигналов, а по оси ординат время t, в течении которого сигнал (меандр) поступает на преобразователь частоты, T – период, а τ – время длительности импульса, в течении которого состояние резервного выхода модуля выходных дискретных сигналов реагирует на входной сигнал, поступающий на резервный вход модуля входных резервных сигналов, оно и является временем быстродействия системы.
Вычисляя частоту сигнала на резервном входе частотного модуля (преобразователя частоты), время быстродействия рассчитывается им же программно по следующей формуле:

где t - время длительности одного периода;

где ν - частота колебаний сигнала.

Так как расчет времени быстродействия происходит непрерывно, полученное значение контроллером может сравниваться с паспортным значением времени быстродействия на определенный вид САУ и при его расхождении может выводиться предупредительное сообщение на автоматизированное рабочее место оператора.
Список источников:
1. Пат.746364 СССР, М Кл2 G01R 35/00. Способ определения быстродействия электроизмерительных приборов / Лысенков А.И.: заявитель и патентообладатель Лысенков А.И. - №2483731/18-21; заявл. 05.05.1977; опубл. 07.07.1980, Бюл. №25. - 2 с.: 1 ил.
Способ определения быстродействия систем автоматического управления, реализуемый с помощью системы, включающей в себя контроллер, модуль входных сигналов, модуль выходных сигналов, частотный модуль, заключающийся в том, что резервные входы модуля входных дискретных сигналов и частотного модуля и резервный выход модуля выходных дискретных сигналов соединяют между собой электрическим проводником, изменяют алгоритм работы контроллера таким образом, что с резервного выхода модуля выходных сигналов подаётся логическая единица на резервный вход модуля входных сигналов, при обнаружении единицы на резервном входе модуля входных дискретных сигналов контроллер инвертирует сигнал на резервном выходе модуля выходных дискретных сигналов в логический ноль, при обнаружении на резервном входе модуля входных дискретных сигналов нуля инвертирует его на выходном модуле дискретных сигналов обратно в единицу, повторяя данный цикл непрерывно, частотный модуль определяет частоту сигнала, используя значение которой, рассчитывает быстродействие работы системы.
Способ диагностирования сварных соединений, наплавок и тела трубы магистральных газопроводов большого диаметра радиографическим методом неразрушающего контроля под давлением, без прекращения транспорта газа
Горелочное устройство
Способ оценки технического состояния изоляционного покрытия подземного трубопровода
Способ прокладки подземного трубопровода
Способ выполнения импульсной обвязки трубопроводной арматуры на крановых узлах, расположенных в условиях заболоченной местности и подвижного грунта
Способ очистки горелочных устройств индивидуальных камер сгорания предварительного смешения топлива и установка для его применения
Способ перестановки шаровых кранов с пневматическим приводом и устройство для его осуществления
Способ снижения температуры воздуха в полости между коническим корпусом силовой турбины двигателя ал-31стн и внутренним корпусом улитки газоперекачивающего агрегата ц1-16л/76-1,44
Способ промывки форсунок газотурбинного двигателя дг-90л2.1
Способ увеличения механической прочности полиэтиленовых муфт
Способ удаления конденсата из зашаровой полости трубопроводной арматуры и устройство для его осуществления

