Результат интеллектуальной деятельности: Способ навигации летательных аппаратов и устройство для его осуществления
Вид РИД
Изобретение
Изобретение относится к области радиолокационной техники и может быть использовано при построении радиолокаторов рельефометрических систем (РРС), предназначенных для определения местоположения летательных аппаратов (ЛА) в соответствии с корреляционно-экстремальным принципом навигации.
Реализация данного принципа заключается в составлении текущей карты местности (ТКМ) по данным измерений параметров мерного участка подстилающей поверхности однолучевым или многолучевым радиолокатором с последующим сравнением ТКМ с эталонной картой местности (ЭКМ), находящейся на борту ЛА до начала его движения. Вычисляют сигнал коррекции местоположения ЛА на основе анализа различий (взаимных смещений) ЭКМ и ТКМ мерного участка [Ржевкин, В.А. Автономная навигация по картам местности / В. А. Ржевкин // Зарубежная радиоэлектроника. - 1981. - №10. - С.3-28].
Известен способ навигации ЛА [Патент 2598000 РФ, МПК G01S 13/91 (2006.01). Способ автономной навигации летательных аппаратов / Кашин А.В., Хрусталев А.А., Кунилов А.Л., Ивойлова М.М.; заявители и патентообладатели Госкорпорация «Росатом», ФГУП «ФНПЦ НИИИС им. Ю.Е. Седакова». - 2015154920/07; заявлено 21.12.15; опубликовано 20.09.16, Бюл. №26], выбранный за аналог.
Реализация способа заключается в определении наклонных дальностей ЛА до подстилающей поверхности по нескольким лучам, в каждом из которых излучают и принимают радиоволны в виде последовательности радиоимпульсов, начальные фазы которых модулированы М-последовательностью (МП), ортогональной модулирующим М-последовательностям радиоволн в других лучах, при этом радиоволны излучают одновременно на общей для всех лучей частоте. Отраженные волны разделяют по лучам и определяют наклонные дальности корреляционным способом с использованием модулирующих М-последовательностей в качестве опорных функций или способом согласованной фильтрации с использованием модулирующих М-последовательностей в качестве весовых коэффициентов. Таким образом, в РРС осуществляется кодовое разделение сигналов лучей принимаемых одновременно. Увеличение количества используемых лучей ведет к существенному увеличению поступаемой информации за один такт измерения, что уменьшает время измерений местоположения ЛА. Недостатки аналога следующие:
- недостаточная точность составления ТКМ при существенно различных уровнях принимаемых сигналов используемых лучей;
- сложность практической реализации способа.
Причина первого недостатка обусловлена тем, что при разделении принимаемых сигналов лучей, в случае уменьшения амплитуды некоторых из них по сравнению с другими, наблюдается уменьшение уровней главных максимумов корреляционных функций суммарного принимаемого сигнала всех лучей и соответствующих малым сигналам модулирующих последовательностей.
Значения корреляционных интегралов Kj(τ0), являющихся результатом взаимно-корреляционной обработки огибающей принимаемого суммарного сигнала uΣ(t) и опорных сигналов u0j(t) трех лучей, можно определить как

где τ0 - задержка опорного сигнала j-того луча, Аi- амплитуда принимаемого сигнала i-того луча, Kjj(τ0) - корреляционные функции сигнала i-того луча и j-того опорного сигнала [Кашин, А.В. О возможности применения CDMA-технологии в трехлучевом радиолокаторе системы автономной навигации / А.В. Кашин, А.Л. Кунилов, М.М. Ивойлова // Материалы XXIII Международной научно-технической конференции «Информационные системы и технологии» ИСТ-2017. - Н.Новгород: НГТУ им. Р.Е. Алексеева. - 2017. - С. 1302-1306].
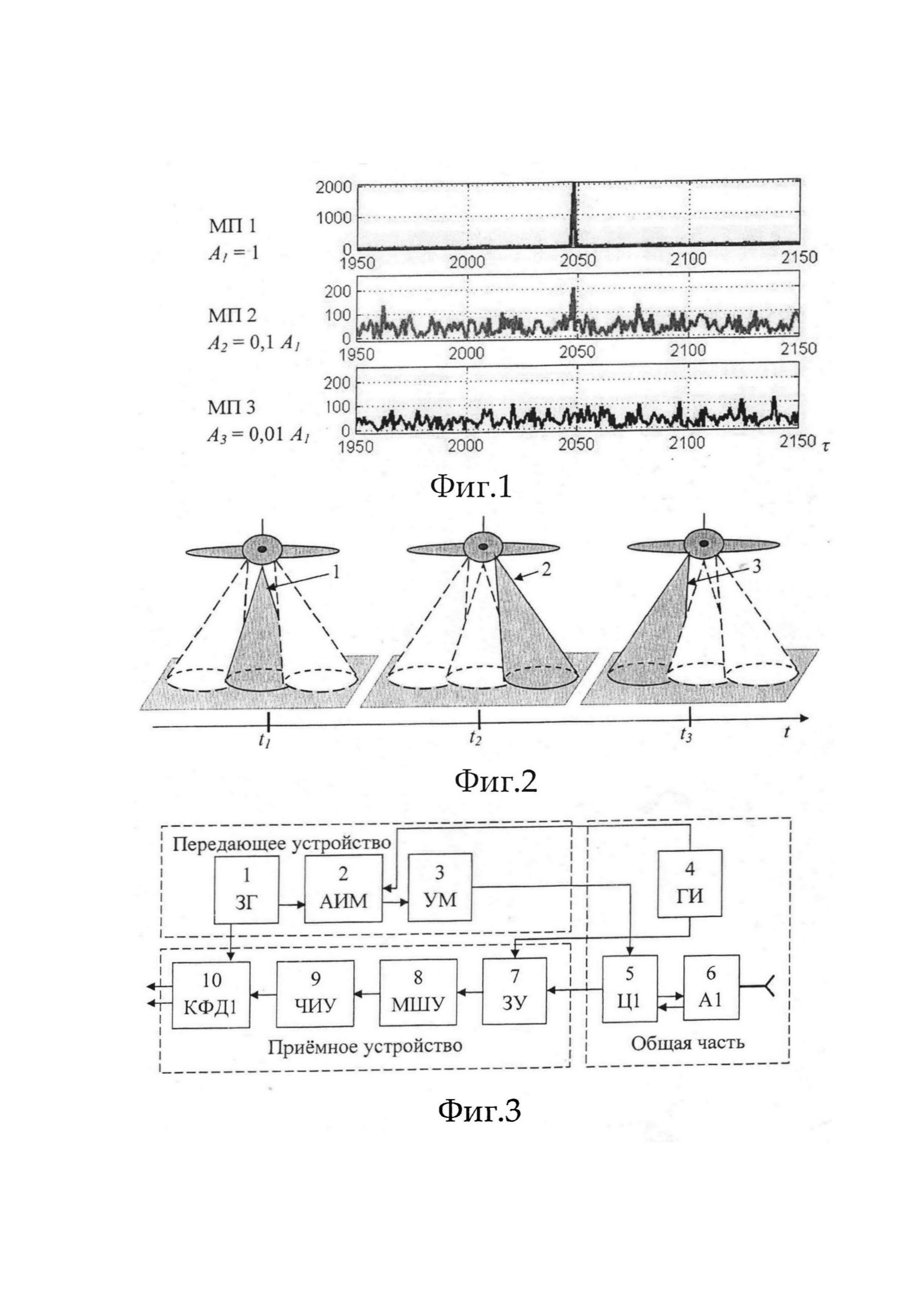
Полученные с использованием (1) графики корреляционных интегралов Kj(τ0), при различных значениях Ai (фиг. 1) наглядно демонстрируют, что малые сигналы могут оказаться скрыты в корреляционных шумах больших сигналов, что в свою очередь может привести к потере информации, получаемой по данным лучам.
Причина второго недостатка обусловлена тем, что для реализации данного способа необходимо многоканальное приемопередающее устройство, количество каналов в котором соответствует количеству лучей, с амплитудно-фазовым модулятором в каждом канале передатчика, управляемым ортогональными модулирующими последовательностями, и корреляторами или согласованными фильтрами в каждом канале приемника для раскодирования принимаемых сигналов лучей.
Известен способ навигации ЛА [Патент 2284544 РФ, МПК G01S 5/02 (2006.01) G01C 21/20 (2006.01). Способ навигации летательных аппаратов / Хрустал ев А.А., Кольцов Ю.В., Рындык А.Г., Плужников А.Д., Потапов Н.Н., Егоров С.Н.; заявители и патентообладатели Госкорпорация «Роса-том», ФГУП «ФНПЦ НИИИС им. Ю.Е. Седакова». - №2005116497/09; заявлено 30.05.05; опубликовано 27.09.06, Бюл. №27] на основе РРС с использованием радиоволн, излучающихся последовательно в виде трех или более лучей, выбранный за прототип.
Реализация способа заключается в составлении ТКМ путем измерения параметров мерного участка с помощью радиоволн, при излучении представляющих собой лучи, которые воздействуют на подстилающую поверхность последовательно (фиг. 2, где поз. 1 - луч 1, поз. 2 - луч 2, поз. 3 - луч 3). Определяют местоположение ЛА на основе полученных измерений наклонных дальностей, сигнал коррекции движения ЛА вычисляют в соответствии с дифференциально-разностным алгоритмом обработки многолучевых измерений (ДРАОМИ). Таким образом, в данной РРС осуществляется временное разделение принимаемых последовательно сигналов лучей.
Известно устройство [СВЧ-электроника в системах радиолокации и связи. Книга 1 / А.И. Белоус, М.К. Мерданов, С.В. Шведов - М.: Изд-во Техносфера, 2016. - С. 55], с помощью которого возможна реализация способа-прототипа навигации ЛА, выбранное за устройство-прототип. Структурная схема данного устройства приведена на фиг. 3.
Работа устройства-прототипа осуществляется следующим образом. Сигнал высокочастотного задающего генератора 1 поступает на вход амплитудно-импульсного модулятора 2, где модулируется по амплитуде видеоимпульсной последовательностью, сформированной генератором импульсов 4 и подающейся на модулирующий вход амплитудно-импульсного модулятора 2. Временная форма сформированного таким образом сигнала первого луча  ) представляющего собой последовательность радиоимпульсов, имеет вид
) представляющего собой последовательность радиоимпульсов, имеет вид

где U(t) - огибающая зондирующих радиоимпульсов; Т-период следования радиоимпульсов в последовательности; ω0 - частота несущего колебания;  , L - порядковый номер радиоимпульса и число радиоимпульсов в последовательности (длина последовательности
, L - порядковый номер радиоимпульса и число радиоимпульсов в последовательности (длина последовательности  - сдвиг начальной фазы -го радиоимпульса.
- сдвиг начальной фазы -го радиоимпульса.
Сигнал (2) усиливается в усилителе мощности 3, через Y-циркулятор 5 поступает на вход антенны 6 и излучается.
Отраженный сигнал принимается той же антенной 6 и через Y-циркулятор 5 поступает на защитное устройство 7, управляющий вход которого соединен с вторым выходом генератора импульсов 4, предохраняющее приемное устройство от входных сигналов и помех высоких уровней. Далее отраженный сигнал усиливается в малошумящем усилители 8 и через частотно-избирательное устройство 9, настроенное на частоту задающего генератора, поступает на вход квадратурного фазового детектора 10, при этом в качестве гетеродинного сигнала в детекторе 10 используется сигнал с выхода задающего генератора 1. Выделяемая квадратурным фазовым детектором 10 комплексная огибающая сигнала первого луча обрабатывается корреляционным способом или способом согласованной фильтрации.
Описанная процедура формирования, излучения и приема сигнала первого луча повторяется последовательно еще дважды для второго и третьего лучей. С целью получения наклонных дальностей при переходе от первого ко второму лучу, от второго к третьему лучу и при переходе к новому циклу измерений антенна приемопередатчика поворачивается на некоторый заданный угол.
Недостатки прототипов следующие:
- недостаточное быстродействие и точность определения текущего местоположения ЛА в процессе его движения над мерным участком с повышенными скоростями;
- ограничения на высоты полета ЛА над мерным участком.
Причиной первого недостатка является последовательный переход излучения и приема радиоволн с одного луча на другой луч, при котором за время излучения и приема по одному лучу ЛА перемещается относительно подстилающей поверхности и в результате при излучении и приеме радиоволн по другим лучам пятно засветки, дальность до которого определяется, оказывается смещено вперед по курсу полета ЛА. Это приводит к зависимости точности определения текущего местоположения ЛА от скорости его движения и длительности излучаемых радиоволн.
Причина второго недостатка обусловлена тем, что: во-первых, с увеличением высоты полета ЛА возрастает требование к энергетическому потенциалу РРС, реализация которого в рамках данного способа при сохранении импульсной мощности излучаемых в каждом луче радиоволн возможна только за счет увеличения их длительности, что, как было сказано выше, приведет к росту ошибки определения местоположения ЛА над мерным участком; во-вторых, со снижением высоты полета ЛА возрастает требование к величине «мертвой» зоны РРС, реализация которого возможна при уменьшении длительности радиоволн, излучаемых в каждом луче, и повышении скорости перехода РРС как из режима излучения радиоволн в режим приема отраженных радиоволн в пределах одного луча, так и перехода с одного луча на другой, что может представлять техническую проблему.
Техническим результатом предлагаемого изобретения является повышение быстродействия радиолокационных рельефометрических систем, а также точности определения местоположения летательного аппарата при движении над мерным участком с повышенными скоростями и увеличении диапазона высот при полете.
Технический результат достигается тем, что в способе навигации летательных аппаратов, заключающемся в определении наклонных дальностей летательного аппарата до подстилающей поверхности по трем узким лучам, посредством излучения радиоволн в направлении подстилающей поверхности, последующем приеме отраженных радиоволн и определении задержек принимаемых сигналов трех лучей относительно излучаемых сигналов, радиоволны излучают по трем не перекрывающимся по частотам лучам одновременно. Сигналы лучей формируют из одного непрерывного гармонического колебания путем его амплитудной модуляции низкочастотным гармоническим колебанием, последующего преобразования полученного ампли-тудно-модулированного сигнала с помощью амплитудно-импульсной и фазовой модуляций в амплитудно-модулированную последовательность фазо-модулированных радиоимпульсов заданной длительности, которую частотной фильтрацией разделяют на три последовательности радиоимпульсов, частоты которых соответствуют частотам лучей и равны частоте амплитуд-но-модулированного сигнала, нижней и верхней боковым частотами его спектра. При этом отраженные радиоволны принимают по тем же трем лучам и обрабатывают корреляционным способом с использованием модулирующей последовательности в качестве опорной функции или способом согласованной фильтрации с использованием модулирующей последовательности в качестве весовых коэффициентов.
Технический результат достигается тем, что в устройстве, осуществляющем навигацию летательных аппаратов на основе определения их наклонных дальностей до подстилающей поверхности по трем лучам, передающее устройство которого содержит задающий генератор и последовательно соединенные амплитудно-импульсный модулятор с усилителем мощности; общая часть приемного и передающего устройств содержит Y-циркулятор, первое плечо которого подключено к усилителю мощности передающего устройства, и антенну, а также генератор импульсов, первый выход которого соединен с модулирующим входом амплитудно-импульсного модулятора передающего устройства; приемное устройство содержит защитное устройство, управляющий вход которого соединен с вторым выходом генератора импульсов, а выход подключен к входу малошумящего усилителя, который через частотно-избирательное устройство подключен к сигнальному входу квадратурного фазового детектора, введены следующие изменения. В передающее устройство введены последовательно соединенные амплитудный модулятор, сигнальный вход которого соединен с выходом задающего генератора, делитель мощности и фазовый модулятор, причем вход фазового модулятора соединен с первым выходом делителя мощности, а его выход соединен с сигнальным входом амплитудно-импульсного модулятора, введены генератор непрерывного гармонического сигнала, выход которого соединен с модулирующим входом амплитудного модулятора, и генератор кодовой последовательности, выход которого соединен с модулирующим входом фазового модулятора. В общую часть приемного и передающего устройств введен первый полосно-пропускающий фильтр, настроенный на частотный диапазон первого луча, подключенный одним вводом к второму плечу Y-циркулятора, другим вводом - к входу антенны, введены последовательно соединенные второй Y-циркулятор, второй полосно-пропускающий фильтр, настроенный на частотный диапазон второго луча, и антенна второго луча, так что первое плечо второго Y-циркулятора соединено с третьим плечом Y-циркулятора, а второе плечо второго Y-циркулятора соединено с вводом второго полосно-пропускающего фильтра, введены последовательно соединенные третий Y-циркулятор, третий полосно-пропускающий фильтр, настроенный на частотный диапазон третьего луча, и антенна третьего луча, так что первое плечо третьего Y-циркулятора соединено с третьим плечом второго Y-циркулятора, второе плечо третьего Y-циркулятора соединено с вводом третьего полосно-пропускающего фильтра, а третье плечо третьего Y-циркулятора соединено с входом защитного устройства приемного устройства. В приемном устройстве частотно-избирательное устройство, располагающееся после малошумящего усилителя, выполнено в виде первого частотного разделителя. В приемное устройство введен второй частотный разделитель, вход которого соединен с вторым выходом делителя мощности передающего устройства, введены второй и третий квадратурные фазовые детекторы, так что входы каждого из трех детекторов соединены с тремя выходами первого частотного разделителя, а входы опорного сигнала этих детекторов соединены с выходами второго частотного разделителя.
Предлагаемые способ и устройство навигации ЛА, а также способы и устройство навигации, выбранные за аналог и прототипы, поясняют рисунки, приведенные на фиг. 1-6.
Фигура 1. Корреляционные функции суммарного принимаемого сигнала трех лучей с учетом различных амплитуд сигналов (А!, А2, А3), принимаемых по каждому лучу, и соответствующих каждому лучу модулирующих М-последовательностей.
Фигура 2. Схема расположения лучей РРС относительно мерного участка подстилающей поверхности при излучении и приеме радиоволн по трем узким лучам последовательно.
Фигура 3. Структурно-функциональная схема устройства, осуществляющего способ навигации летательных аппаратов, выбранный за прототип.
На схеме фиг. 3 приняты следующие обозначения:
для передающего устройства: 1 - задающий генератор (ЗГ), 2 - амплитудно-импульсный модулятор (АИМ), 3 - усилитель мощности (УМ);
для общей части приемного и передающего устройств: 4 - генератор импульсов (ГИ), 5 - Y-циркулятор (Ц1), 6 - антенна (А1);
для приемного устройства: 7 - защитное устройство (ЗУ), 8 - малошумящий усилитель (МШУ), 9 - частотно-избирательное устройство (ЧИУ), 10 -квадратурный фазовый детектор (КФД1).
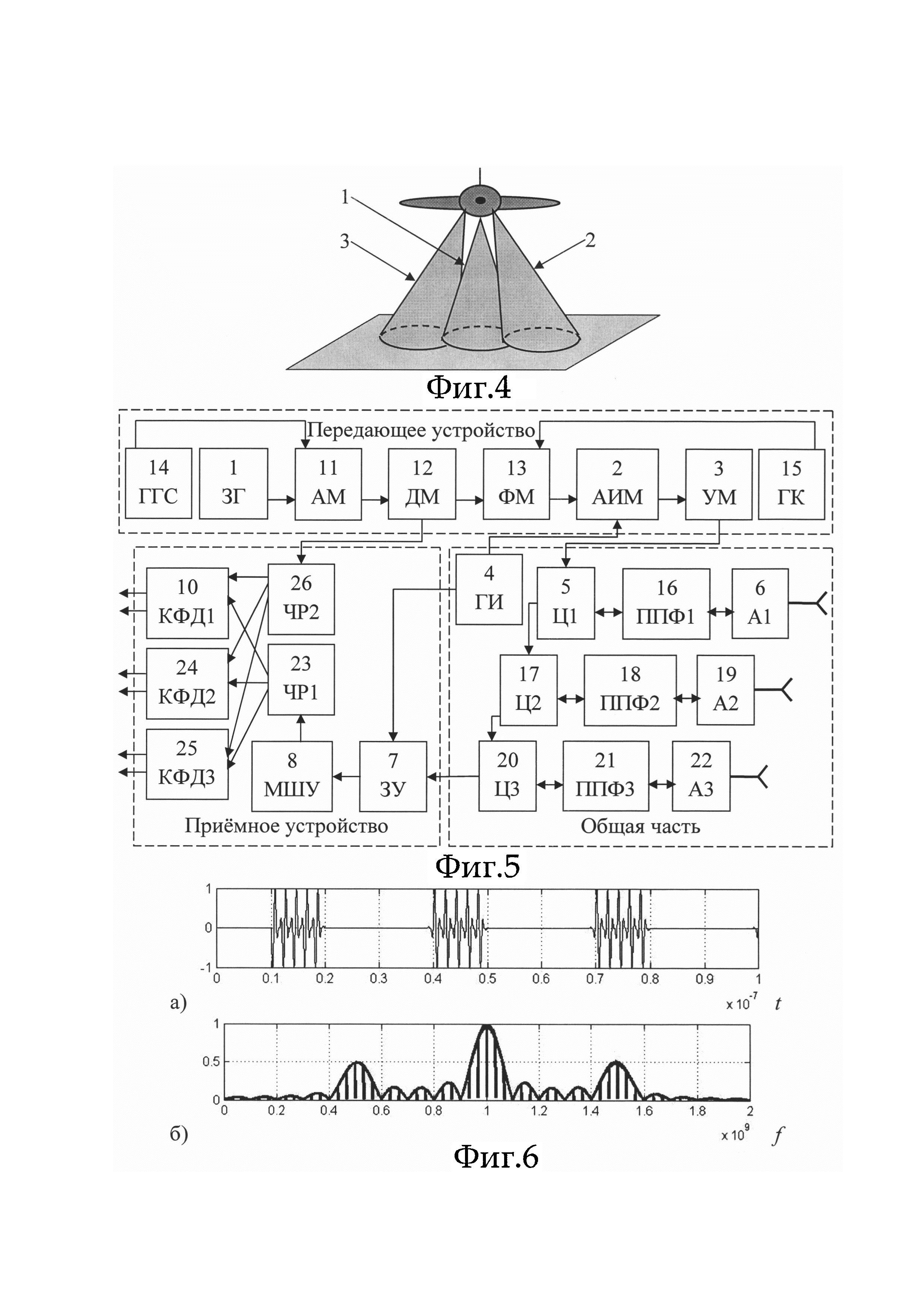
Фигура 4. Схема расположения лучей РРС относительно мерного участка подстилающей поверхности при излучении и приеме радиоволн по трем узким лучам одновременно.
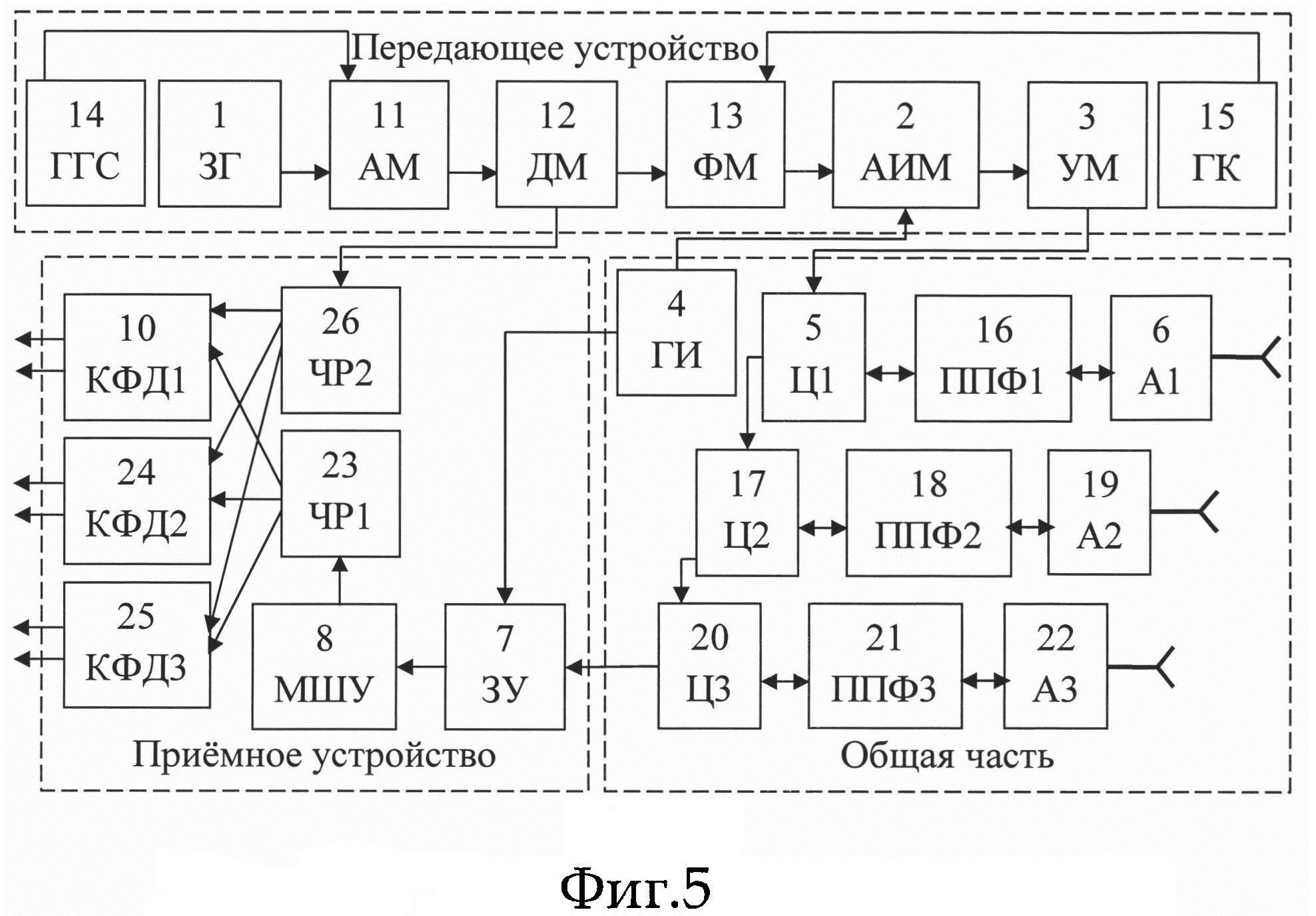
Фигура 5. Структурно-функциональная схема устройства, осуществляющего предлагаемый способ навигации летательных аппаратов.
На схеме фиг. 5 приняты следующие обозначения:
для передающего устройства: 1 - задающий генератор (ЗГ), 2 - амплитудно-импульсный модулятор (АИМ), 3 - усилитель мощности (УМ), 11 -амплитудный модулятор (AM), 12 - делитель мощности (ДМ), 13 - фазовый модулятор (ФМ), 14 - генератор непрерывного гармонического сигнала (ГГС), 15 - генератор кодовой последовательности (ГК);
для общей части приемного и передающего устройств: 4 - генератор импульсов (ГИ), 5 - Y-циркулятор (Ц1), 6 - антенна (А1), 16 - первый полосно-пропускающие фильтр, настроенный на частотный диапазон первого луча (ППФ1), 17 - второй Y-циркулятор (Ц2), 18 - второй полосно-пропускающие фильтр, настроенный на частотный диапазон второго луча (ППФ2), 19 - антенна второго луча (А2), 20 - третий Y-циркулятор (Ц3), 21 - третий полосно-пропускающие фильтр, настроенный на частотный диапазон третьего луча (ППФ3), 22 - антенна третьего луча (A3); для приемного устройства: последовательно соединенные 7 - защитное устройство (ЗУ), 8 - малошумящий усилитель (МШУ), 10 - первый квадратурный фазовый детектор (КФД1), 23 - частотно-избирательное устройство в виде первого частотного разделителя (ЧР1), 24 - второй квадратурный фазовый детектор (КФД2), 25 - третий квадратурный фазовый детектор (КФД3), 26 - частотно-избирательное устройство в виде второго частотного разделителя (ЧР2).
Фигура 6. Формируемый в передатчике амплитудно-фазомодулированный сигнал, имеющий три основные спектральные составляющие, до разделения по трем лучам - временная форма (а), спектральная форма (б).
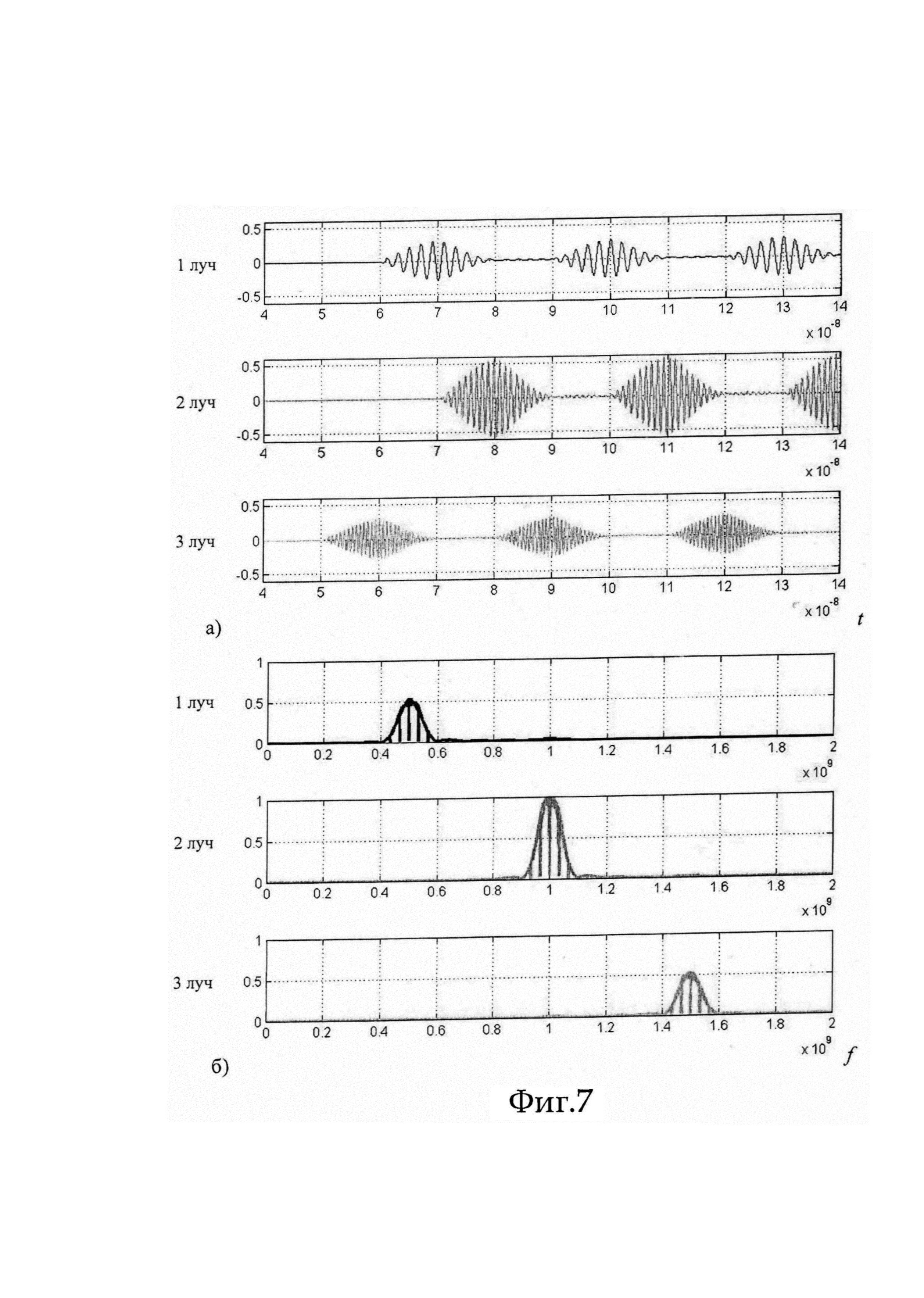
Фигура 7. Принимаемые по трем узким лучам сигналы - временные формы (а), спектральные формы (б).
Реализация предлагаемого способа навигации заключается в том, что радиоволны излучают и принимают, как показано на фиг. 4, по лучам 1-3, направленным в плоскости, ортогональной направлению движения и подстилающей поверхности. Луч 1 направлен вертикально вниз перпендикулярно плоскости подстилающей поверхности (фиг. 4, поз. 1), луч 2 располагается слева от луча 1 по направлению движения ЛА (фиг. 4, поз. 2), а луч 3 - справа (фиг. 4, поз. 3), причем все лучи располагают в одной вертикальной плоскости.
Непрерывный гармонический сигнал на несущей частоте подвергается однотональной амплитудной модуляции низкочастотным относительно несущей гармоническим колебанием. Данный вид модуляции описывается во временной области выражением 
где uAM(t) - амплитудно-модулированный сигнал; U0 - амплитуда несущего колебания в отсутствие модуляции; М - коэффициент амплитудной модуляции; Ω - модулирующая частота; Ф0 - начальная фаза модулирующего колебания; ω0 и ϕ0 - частота и фаза несущего колебания [Радиотехнические цепи и сигналы / СИ. Баскаков - М.: Высш. шк., 1988. - С. 90]. Выражение (1) показывает, что сигнал uAM(t) имеет три основные спектральные составляющие.
Далее непрерывный амплитудно-модулированный сигнал подвергается модуляции видеоимпульсной последовательностью конечной длительности, что позволяет на выходе получить последовательность радиоимпульсов, спектральный состав каждого из которых содержит три основные компоненты, и модуляции начальных фаз каждого радиоимпульса кодовой последовательностью.
Полученный сигнал разделяют посредством полосовой фильтрации на три фазомодулированных радиоимпульсных последовательности, каждая из которых имеет свою несущую частоту. Несущая частота одной из них соответствует частоте амплитудно-модулированного сигнала, а несущие частоты двух других соответствуют нижней и верхней боковым частотам спектра этого сигнала. Каждую из трех радиоимпульсных последовательности излучают по одному из трех узких лучей.
Формирование излучаемых радиоволн в виде сложных сигналов, представляющих собой последовательности фазомодулированных радиоимпульсов, позволяет улучшить энергетические характеристики принимаемого сигнала за счет его сжатия по времени.
Так как области лучей 1-3 не перекрываются в пространстве и размещены перпендикулярно плоскости подстилающей поверхности, а частотные диапазоны лучей 1-3 не перекрывают друг друга, наклонные дальности ЛА до подстилающей поверхности можно определить по задержке принимаемых сигналов лучей 1-3 относительно излучаемых по ним сигналов. Определяют местоположение ЛА на основе полученных измерений наклонных дальностей, сигнал коррекции движения ЛА вычисляют в соответствии с дифференциально-разностным алгоритмом обработки многолучевых измерений (ДРАОМИ). Таким образом, в РРС осуществляется частотное разделение сигналов трех лучей, принимаемых одновременно, и предлагаемый способ навигации позволяет получать информацию, необходимую для определения текущего местоположения ЛА и управления его движением, за время излучения и приема радиоволн как по одному лучу, а не за суммарное время излучения и приема радиоволн по всем лучам, как это сделано в прототипе.
Структурная схема устройства, осуществляющего предлагаемый способ навигации летательных аппаратов, приведена на фиг. 5. Работа устройства, реализующего предлагаемый способ навигации, осуществляется следующим образом. Сигнал высокочастотного задающего генератора 1 поступает на вход амплитудного модулятора 11, где модулируется по амплитуде гармоническим колебанием более низкой частоты, сформированным генератором непрерывного гармонического сигнала 14, выход которого соединен с модулирующим входом амплитудного модулятора 11. Далее полученный сигнал через делитель мощности 12 поступает последовательно на вход фазового модулятора 13, где модулируется по фазе кодовой последовательностью и вход амплитудно-импульсного модулятора 2, где модулируется по амплитуде импульсной последовательностью для формирования на выходе последовательности амплитудно-фазомодулированных радиоимпульсов. Кодовая последовательность, подающаяся на модулирующий вход фазового модулятора 13, формируется генератором кодовой последовательности 15. Видеоимпульсная последовательность, подающаяся на модулирующий вход амплитудно-импульсного модулятора 2, формируется генератором импульсов 4. Временная форма сигнала на выходе амплитудно-импульсного модулятора 2 u(t), приведенная на фиг. 6а, имеет вид

где М - коэффициент амплитудной модуляции; Ω - модулирующая частота; Ф0 - начальная фаза модулирующего колебания; U(t) - огибающая зондирующих радиоимпульсов; Т - период следования радиоимпульсов в последовательности; ω0 - частота несущего колебания; , L - порядковый номер радиоимпульса и число радиоимпульсов в последовательности (длина последовательности); - сдвиг начальной фазы -го радиоимпульса. Спектральная форма данного сигнала приведена на фиг. 66.
Сигнал (4) усиливается в усилителе мощности 3 и через Y-циркулятор 5 и полосно-пропускающий фильтр 16, настроенный на частотный диапазон центральной спектральной составляющей сформированного в передатчике сигнала, поступает на вход антенны первого луча 6 и излучается. Часть сигнала передатчика, спектр которой не попал в полосу пропускания полосно-пропускающего фильтра 16, отражается от его входа и через Y-циркулятор 5 поступает на Y-циркулятор 17 и полосно-пропускающий фильтр 18, настроенный на частотный диапазон нижней боковой спектральной составляющей сигнала передатчика, и далее на вход антенны второго луча 19. Часть сигнала, спектр которой не попал в полосу пропускания полосно-пропускающего фильтра 18, отражается от его входа и через Y-циркулятор 17 поступает на Y-циркулятор 20 и полосно-пропускающий фильтр 21, настроенный на частотный диапазон верхней боковой спектральной составляющей сигнала передатчика, и далее на вход антенны третьего луча 22.
Отраженные сигналы принимаются теми же антеннами 6, 19 и 22. Временные и спектральные формы принимаемых сигналов приведены на фиг. 7. Сигнал 1-ого луча через антенну 6, полосно-пропускающий фильтр 16 и Y-циркулятор 5 поступает на Y-циркулятор 17, на который с выхода антенны 19 через полосно-пропускающий фильтр 18 поступает сигнал 2-ого луча. Эти сигналы суммируются и поступают на Y-циркулятор 20, на который с выхода антенны 22 через полосно-пропускающий фильтр 21 поступает сигнал 3-ого луча. Сигналы трех лучей суммируются, далее, пройдя через защитное устройство 7, усиливаются в малошумящем усилителе 8 и разделяются с помощью частотно-избирательного устройства в виде частотного разделителя 23, так что на каждом из трех выходов частотного разделителя 23 формируются последовательности амплитудно-фазомодулированных радиоимпульсов имеющие каждая свою несущую частоту. В схеме данного устройства частотный разделитель 23 выполняет функцию, аналогичную частотно-избирательному устройству 9 в схеме устройства-прототипа, формируя на выходах узкополосные радиоимпульсные сигналы для дальнейшей обработки посредством детектирования. Разделенные отраженные сигналы трех лучей с выходов частотного разделителя 23 поступают на входы трех квадратурных фазовых детекторов 10, 24 и 25, при этом в качестве гетеродинных сигналов на входы опорного сигнала детекторов 10, 24 и 25 поступают сигналы с выходов частотного разделителя 26, вход которого соединен с вторым выходом делителя мощности 12. Выделяемые квадратурными фазовыми детекторами 10, 24 и 25 комплексные огибающие трех лучей обрабатываются корреляционным способом или способом согласованной фильтрации.
Излучение и прием радиоволн в виде последовательностей фазомодулированных радиоимпульсов по трем не перекрывающимся по частотам узким лучам, позволяет по сравнению с прототипом и аналогом:
- повысить быстродействие навигационной системы, что обеспечит ее работоспособность при движении ЛА с повышенными скоростями;
- повысить точность определения местоположения ЛА за счет его меньшего смещения относительно подстилающей поверхности в процессе измерений при одновременном излучении и приеме сигналов трех лучей;
- обеспечить работоспособность навигационной системы в большем диапазоне высот за счет того, что необходимую для определения текущего местоположения ЛА и управления его движением информацию возможно получить за время излучения и приема радиоволн по одному лучу, а не за суммарное время излучения и приема радиоволн по всем лучам, как это сделано в прототипе;
- исключить взаимные влияния принимаемых сигналов лучей при корреляционной обработке, посредством их предварительного разделения, в отличие от аналога, где корреляционной обработке подвергается суммарный принимаемый сигнал всех лучей;
- реализовать передающее устройство в одноканальном варианте с применением однотональной амплитудной модуляции сигнала, в отличие от способа-аналога, для реализации которого необходимо многоканальное приемопередающее устройство.
Таким образом, предлагаемый способ навигации летательных аппаратов и устройство для его осуществления обладают рядом существенных преимуществ перед прототипом и аналогом.
Плавленолитой хромсодержащий огнеупорный материал
Способ нанесения на металлическую деталь комплексного покрытия для защиты детали от водородной коррозии, состоящего из множества микрослоев
Способ испытаний полупроводниковых бис технологии кмоп/кнд на стойкость к эффектам единичных сбоев от воздействия тяжелых заряженных частиц космического пространства
Автоматизированная система дистанционного контроля объектов в стационарных хранилищах
Устройство для регистрации профилей скорости свободной поверхности образцов при повышенных температурах
Приемник низкочастотных колебаний давления в водной среде
Коррозионно-стойкая аустенитная сталь
Радиационная защита космической ядерной энергетической установки
Способ получения дихлоргидринов глицерина
Пассивная система охлаждения электронных компонент печатных плат
Способ радиолокации с изменением несущей частоты от импульса к импульсу
Приемопередатчик бортового ретранслятора
Способ формирования фазоманипулированного сигнала системы телеметрии и устройство для его осуществления
Система встроенного контроля бортового ретранслятора

