Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Область техники
[0001] Настоящее раскрытие относится к способу управления движением транспортного средства и к устройству управления движением транспортного средства для управления рассматриваемым транспортным средством так, что оно следует за движущимся впереди транспортным средством.
Предпосылки изобретения
[0002] При управлении рассматриваемым транспортным средством таким образом, что оно следует за движущимся впереди транспортным средством, если это движущееся впереди транспортное средство, за которым следует двигаться, сменяется вследствие смены полосы движения или вклинивания другого транспортного средства, целевое значение управления значительно изменяется, и имеется риск возникновения нестабильного поведения транспортного средства.
[0003] Соответственно, в методе, раскрытом в патентном документе 1 (в выложенной заявке на патент Японии № 2007-176290), когда обнаруживается смена движущегося впереди транспортного средства, усиление, которое используется для управления с обратной связью для следования за движущимся впереди транспортным средством, временно уменьшается для того, чтобы подавить значительное изменение поведения транспортного средства.
Сущность изобретения
[0004] Хотя в случае раскрытого в патентном документе 1 метода можно подавлять значительное изменение поведения транспортного средства, способность следовать за движущимся впереди транспортным средством уменьшается. Как результат, например, если возникает вклинивание в ходе движения по искривленному пути и движущееся впереди транспортное средство сменяется, рассматриваемое транспортное средство не может надлежащим образом следовать за движущимся впереди транспортным средством, которое движется по искривленному пути, и возникает риск того, что рассматриваемое транспортное средство отклонится от полосы движения.
[0005] Следовательно, задача настоящего раскрытия заключается в том, чтобы реализовывать такое управление движением транспортного средства, с помощью которого можно подавлять значительное изменение поведения транспортного средства и обеспечивать способность следовать за движущимся впереди транспортным средством, когда движущееся впереди транспортное средство сменяется.
[0006] Чтобы решить описанную выше задачу, в настоящем раскрытии выполняют следующий процесс при обнаружении вклинивания нового движущегося впереди транспортного средства между движущимся впереди транспортным средством и рассматриваемым транспортным средством. А именно, вычисляют первую область, в которой рассматриваемое транспортное средство может вероятно двигаться, из траектории движения нового движущегося впереди транспортного средства; устанавливают область возможного движения рассматриваемого транспортного средства вплоть до предыдущего времени в качестве второй области; и суммируют первую область и вторую область для задания области возможного движения. Кроме того, формируют целевую траекторию движения рассматриваемого транспортного средства в заданной области возможного движения и управляют рассматриваемым транспортным средством по сформированной целевой траектории движения.
Эффекты изобретения
[0007] В результате можно подавлять значительное изменение поведения транспортного средства, даже когда движущееся впереди транспортное средство сменяется. Также можно обеспечить способность следовать за движущимся впереди транспортным средством.
Краткое описание чертежей
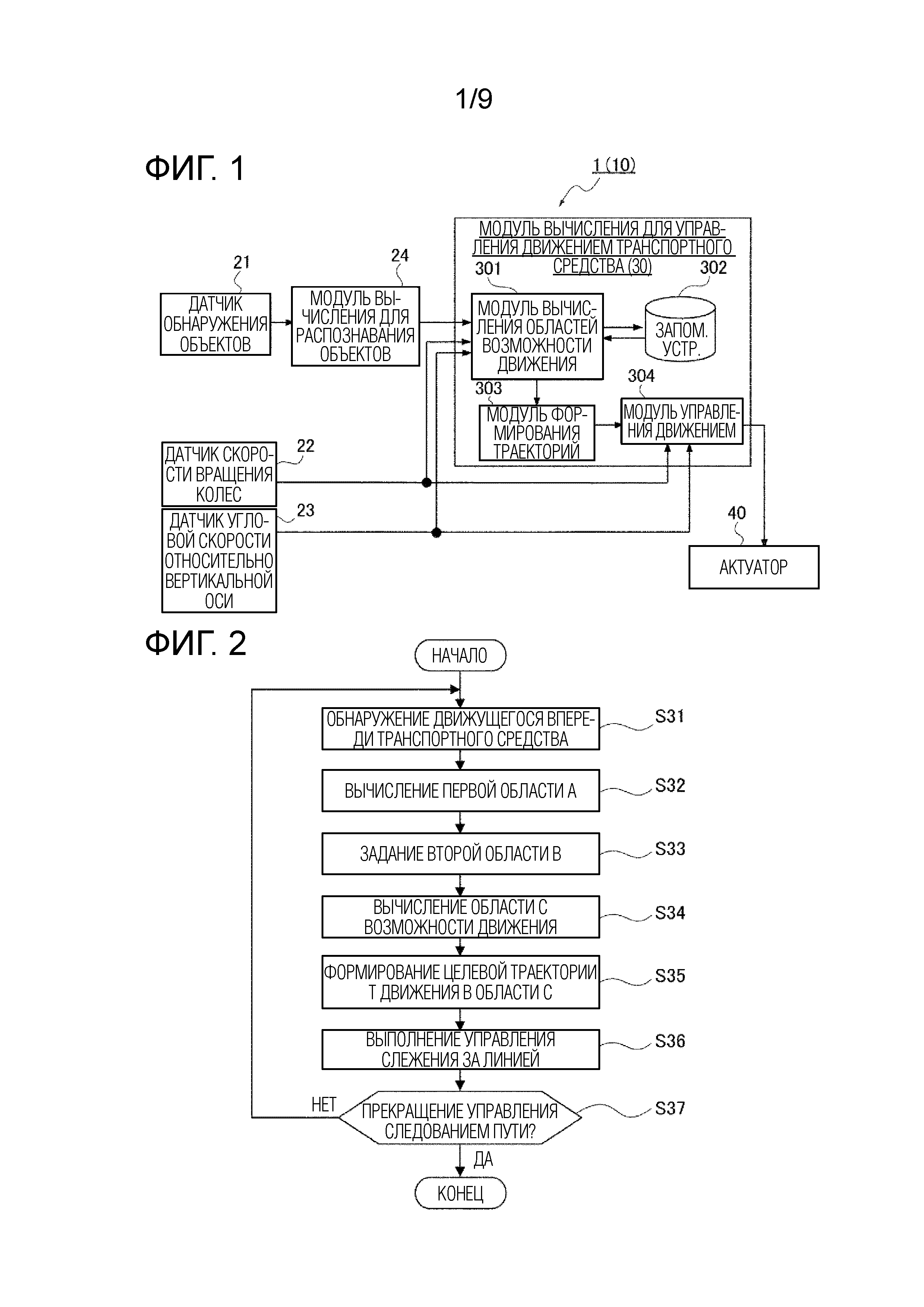
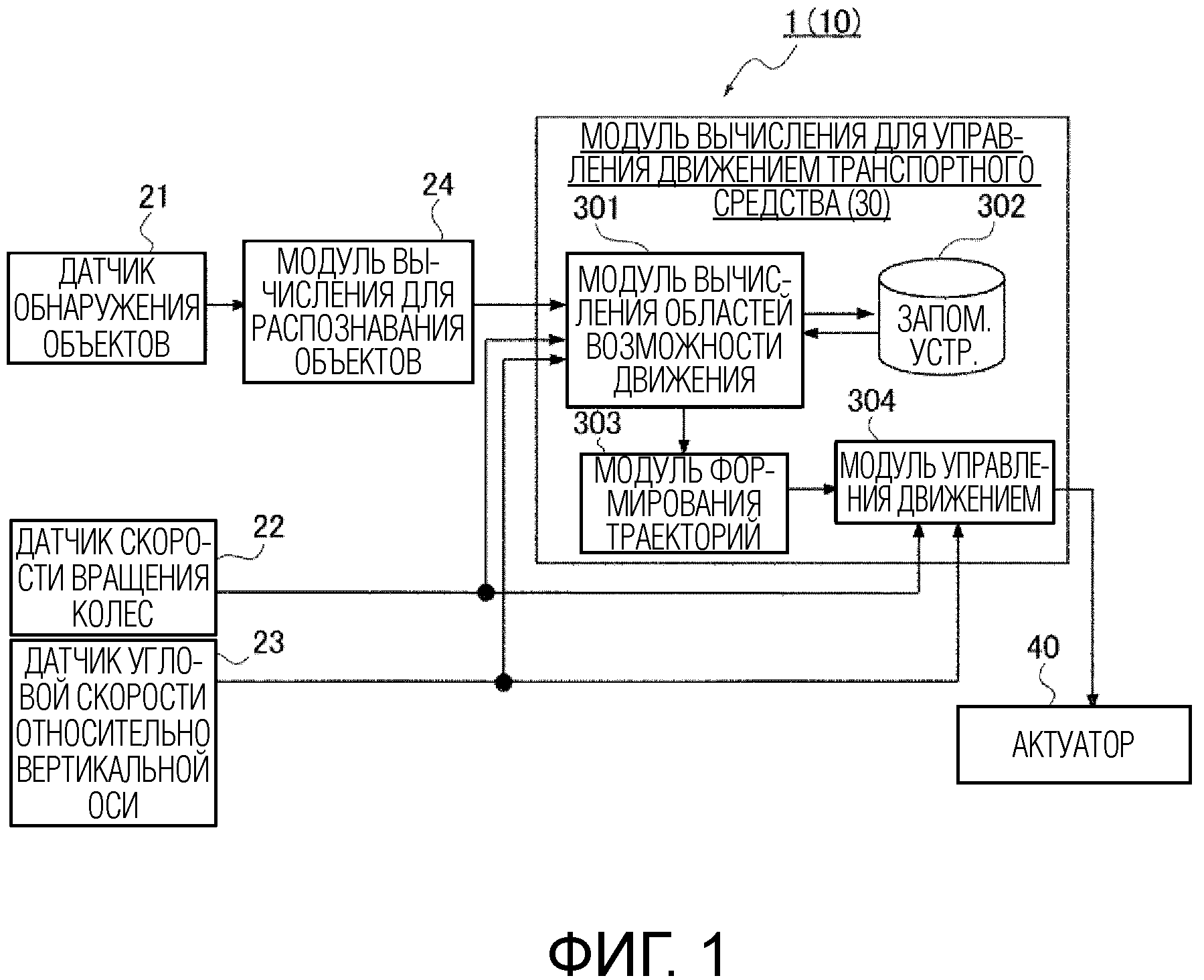
[0008] Фиг. 1 является блок-схемой, иллюстрирующей схематичный вид системы управления движением транспортного средства, в которой применяются способ управления движением транспортного средства и устройство управления движением транспортного средства согласно первому варианту осуществления.
Фиг. 2 является блок-схемой последовательности операций, иллюстрирующей процесс управления движением транспортного средства по первому варианту осуществления, который выполняется модулем вычисления управления движением транспортного средства.
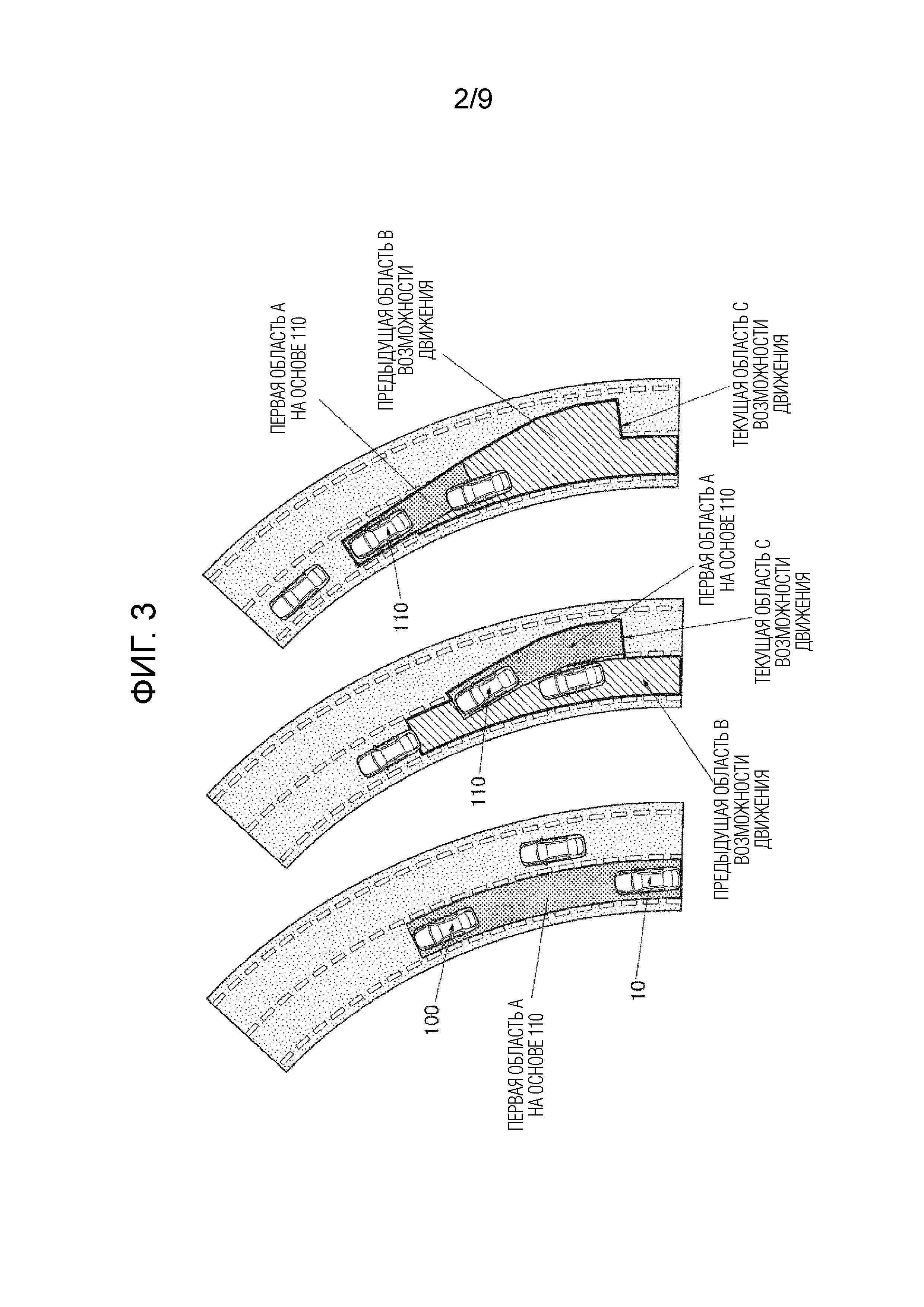
Фиг. 3 является пояснительным видом для пояснения процесса вычисления областей возможного движения по первому варианту осуществления.
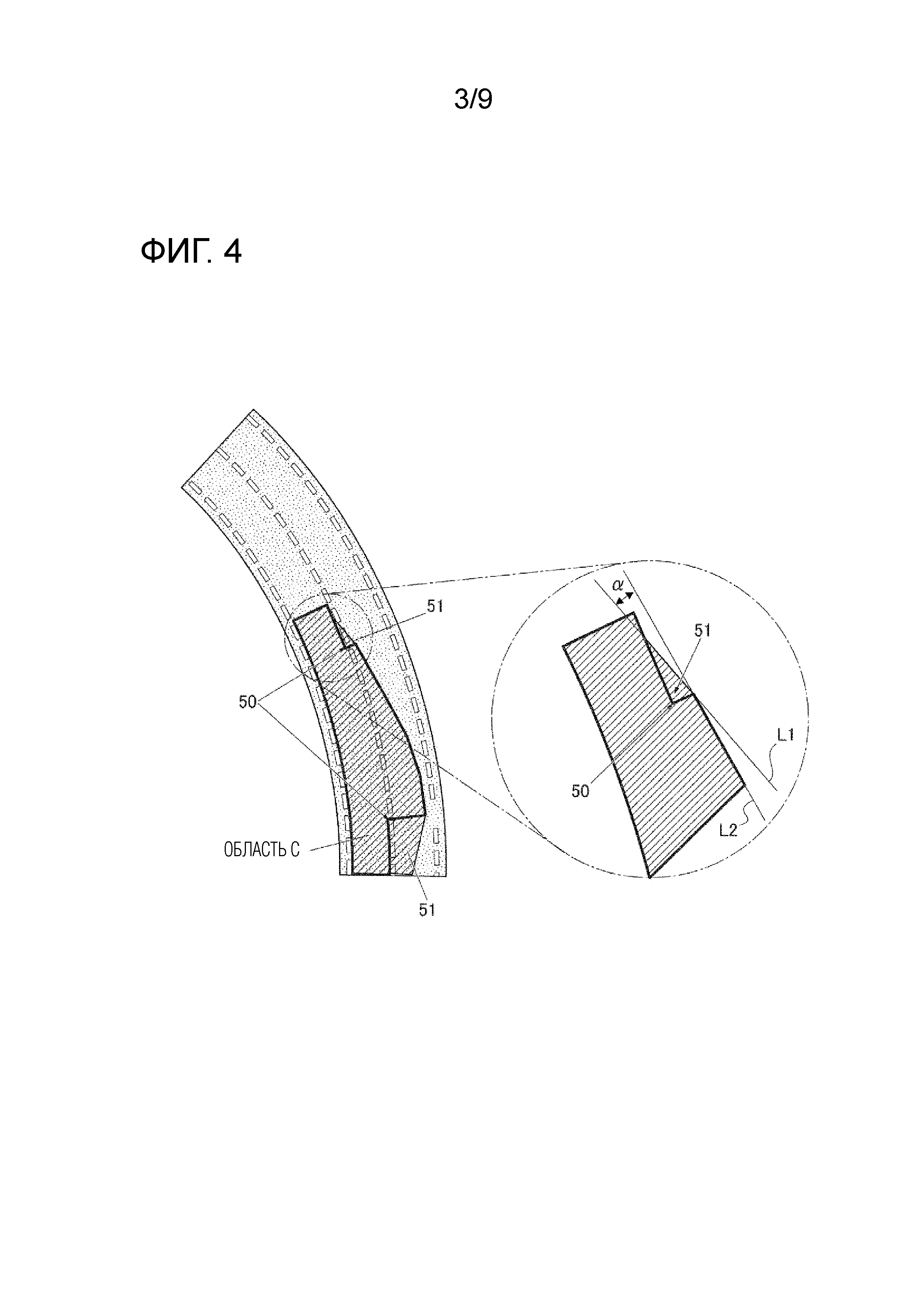
Фиг. 4 является пояснительным видом для пояснения модифицированного примера процесса вычисления областей возможного движения по первому варианту осуществления.
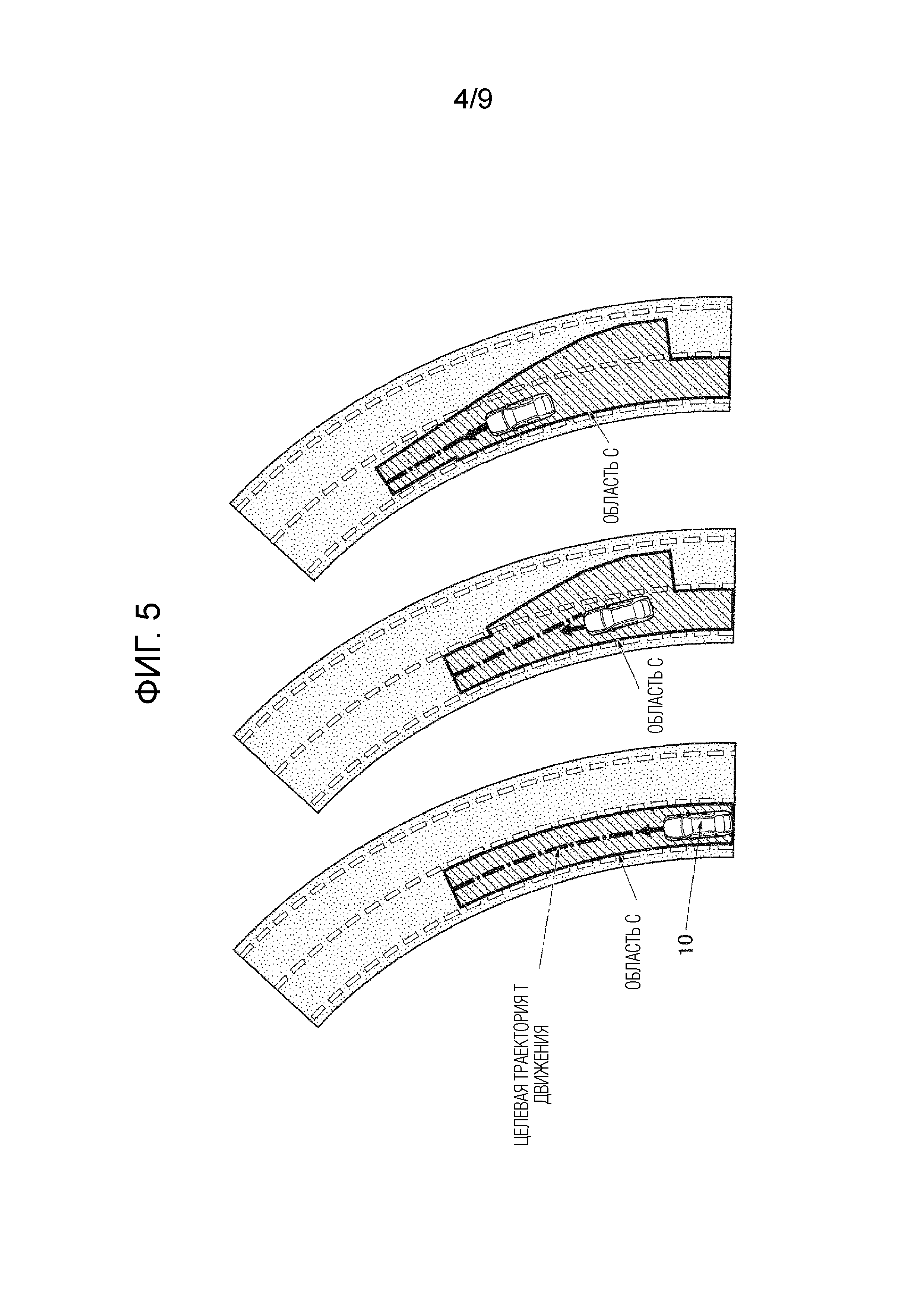
Фиг. 5 является пояснительным видом для пояснения процесса формирования траекторий движения по первому варианту осуществления.
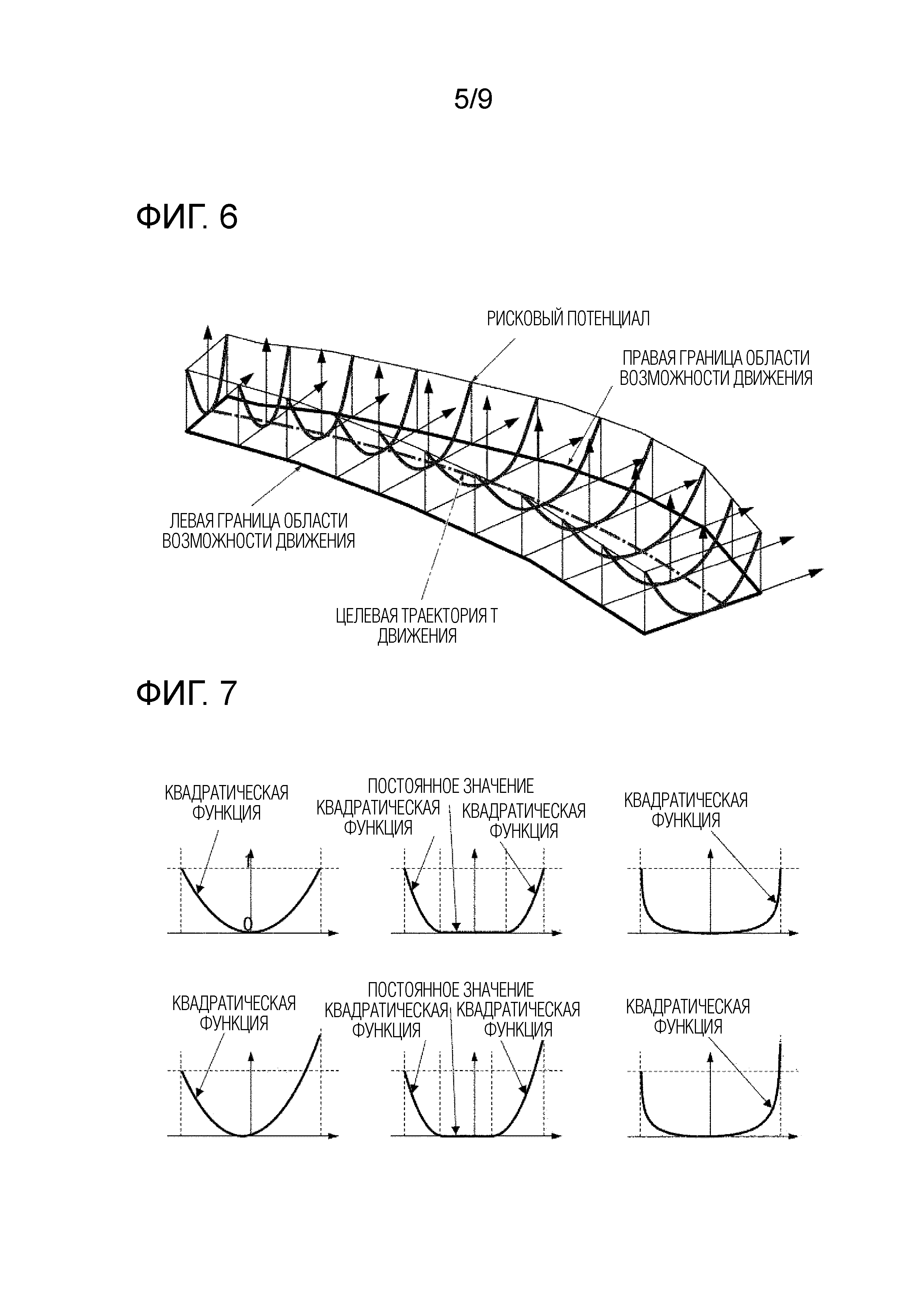
Фиг. 6 является пояснительным видом для пояснения процесса формирования траекторий движения по первому варианту осуществления.
Фиг. 7 является пояснительным видом для пояснения модифицированного примера процесса формирования траекторий движения по первому варианту осуществления.
Фиг. 8 является пояснительным видом, иллюстрирующим эффект управления движением транспортного средства по первому варианту осуществления.
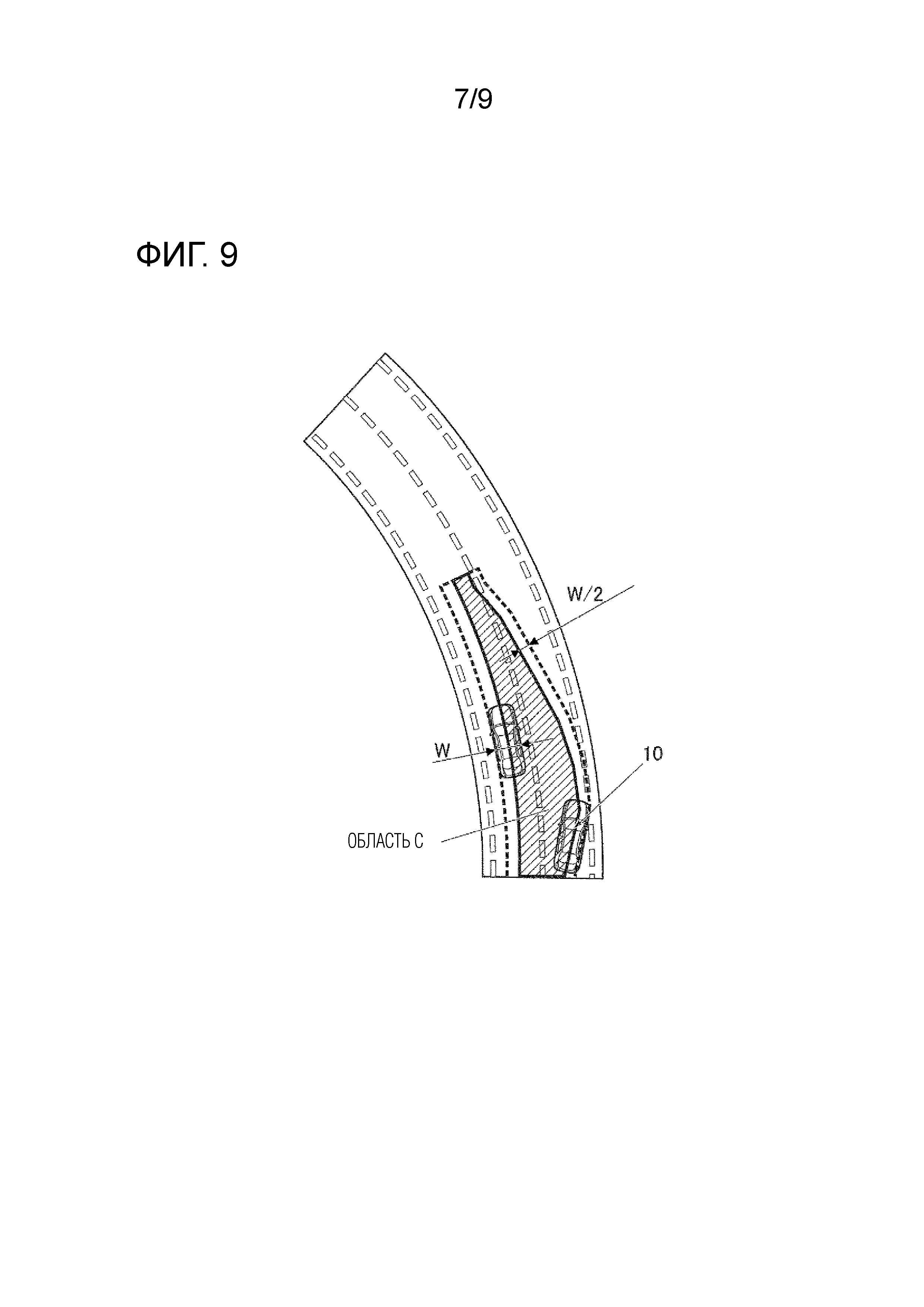
Фиг. 9 является пояснительным видом для пояснения другого модифицированного примера процесса вычисления областей возможного движения по первому варианту осуществления.
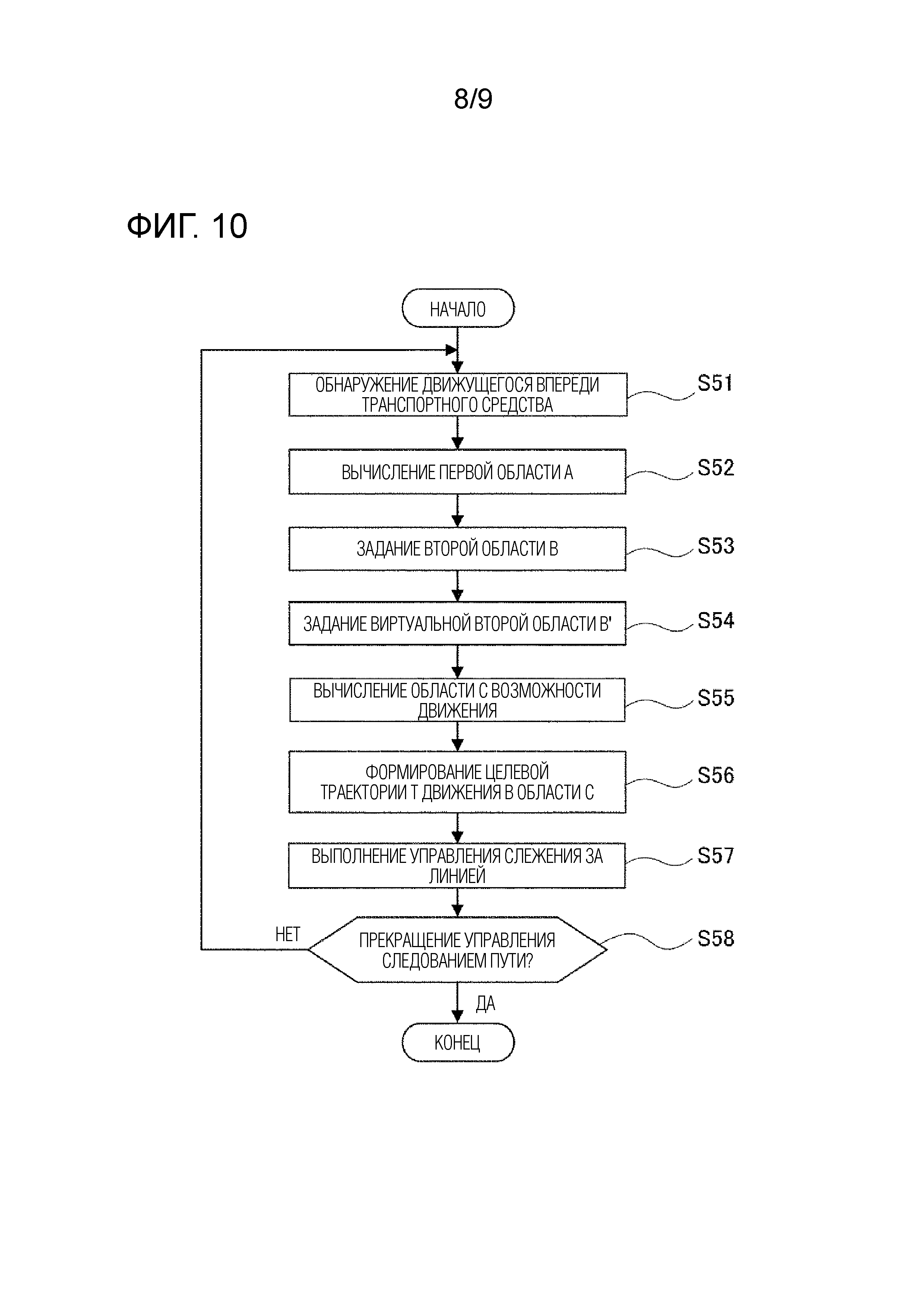
Фиг. 10 является блок-схемой последовательности операций, иллюстрирующей процесс управления движением транспортного средства по второму варианту осуществления, который выполняется модулем вычисления управления движением транспортного средства.
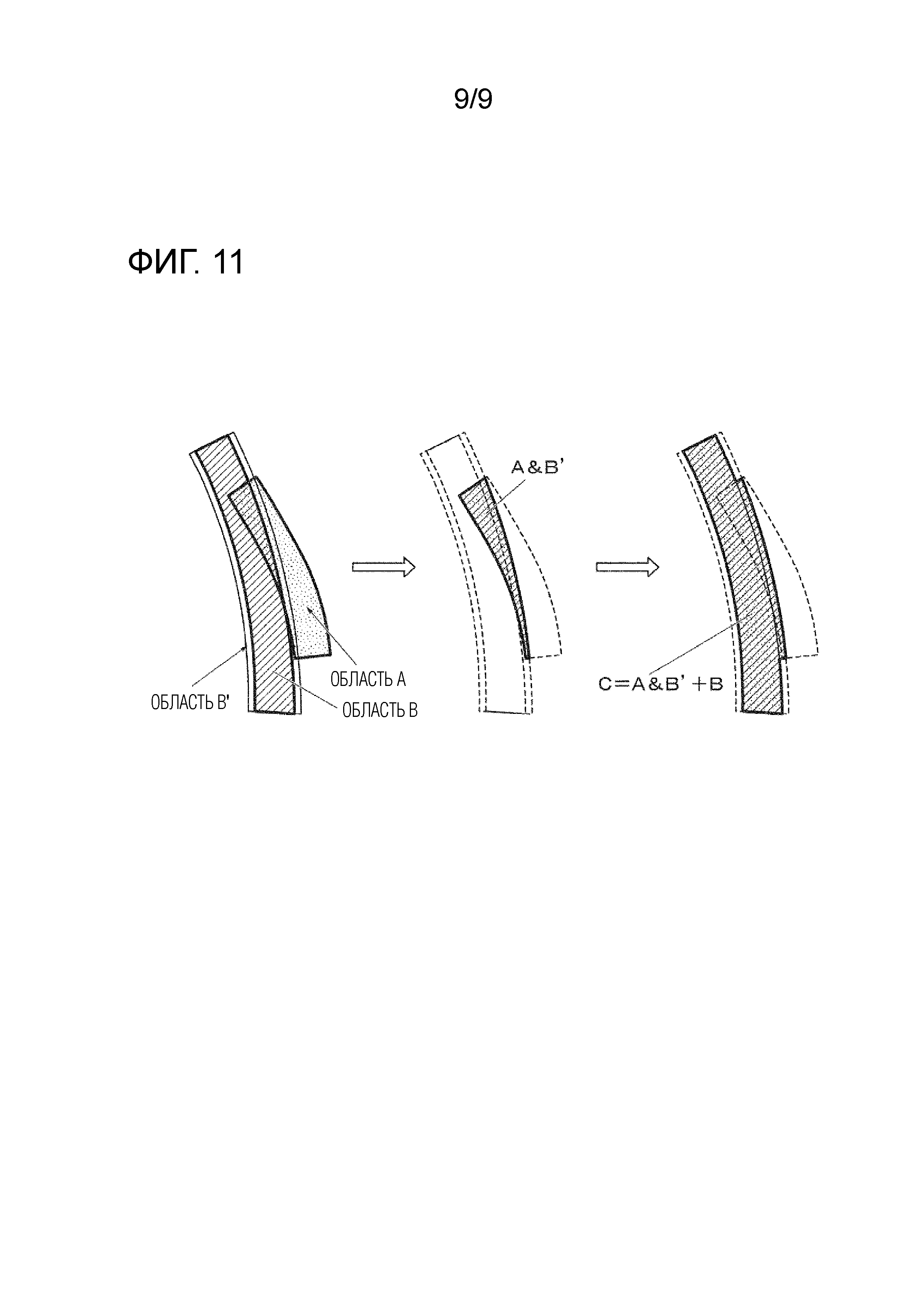
Фиг. 11 является пояснительным видом для пояснения процесса вычисления областей возможного движения по второму варианту осуществления.
Варианты осуществления изобретения
[0009] Ниже вариант осуществления способа управления движением транспортного средства и устройства управления движением транспортного средства согласно настоящему раскрытию будет описан на основе вариантов осуществления, проиллюстрированных на чертежах.
Первый вариант осуществления
[0010] Фиг. 1 является блок-схемой, схематично иллюстрирующей систему 1 управления движением транспортного средства согласно первому варианту осуществления. Система 1 управления движением транспортного средства, показанная на фиг. 1, содержит датчик 21 обнаружения объектов, датчик 22 скорости вращения колес, датчик 23 скорости рыскания, модуль 24 вычисления для распознавания объектов, модуль 30 вычисления управления движением транспортного средства и исполнительный механизм 40. Система 1 управления движением транспортного средства представляет собой систему, которая монтируется на рассматриваемом транспортном средстве 10.
[0011] Датчик 21 обнаружения объектов обнаруживает присутствие/отсутствие помехи или движущегося впереди транспортного средства, которое присутствует в окрестности рассматриваемого транспортного средства 10. Датчик 21 обнаружения объектов состоит из сканирующего лазерного радара, радара миллиметрового диапазона или т.п.
[0012] Датчик 22 скорости вращения колес предусмотрен на левом и правом ведомых колесах рассматриваемого транспортного средства 10 и обнаруживает скорость вращения ведомых колес. Скорость вращения, обнаруженная датчиком 22 скорости вращения колес, используется для вычисления скорости транспортного средства и направления движения рассматриваемого транспортного средства 10. Помимо этого, датчик 23 скорости рыскания обнаруживает угловую скорость поворота рассматриваемого транспортного средства 10. Угловая скорость поворота, обнаруженная датчиком 23 скорости рыскания, используется для вычисления курса рассматриваемого транспортного средства 10.
[0013] Модуль 24 вычисления для распознавания объектов обнаруживает позицию объекта, обнаруженного датчиком 21 обнаружения объектов, и определяет, является ли или нет обнаруженный объект движущимся впереди транспортным средством, на основе размера этого объекта, относительной скорости по отношению к рассматриваемому транспортному средству 10 и т.п. Во время обнаружения движущегося впереди транспортного средства модуль вычисления для распознавания объектов также помечает движущееся впереди транспортное средство. Таким образом, можно обнаружить смену движущегося впереди транспортного средства, когда другое транспортное средство вклинивается между движущимся впереди транспортным средством и рассматриваемым транспортным средством 10, либо когда движущееся впереди транспортное средство меняет полосы движения. Модуль 24 вычисления для распознавания объектов вычисляет скорость обнаруженного движущегося впереди транспортного средства, а также расстояние между транспортными средствами, т.е. между движущимся впереди транспортным средством и рассматриваемым транспортным средством 10, чтобы реализовывать управление следованием за движущимся впереди транспортным средством.
[0014] Модуль 30 вычисления управления движением транспортного средства содержит блок 301 вычисления областей возможного движения, запоминающее устройство 302, блок 303 формирования траекторий и блок 304 управления движением. Блок 301 вычисления областей возможного движения вычисляет ту область, в которой рассматриваемое транспортное средство 10 может вероятно двигаться, на основе результата вычисления модулем 24 вычисления для распознавания объектов и результатов обнаружения датчиком 22 скорости вращения колес и датчиком 23 скорости рыскания.
[0015] Область возможного движения, вычисленная блоком 301 вычисления областей возможного движения, сохраняется в запоминающем устройстве 302 и передается в блок 303 формирования траекторий. Блок 303 формирования траекторий формирует целевую траекторию T движения рассматриваемого транспортного средства 10 в пределах принятой области возможного движения.
[0016] Целевая траектория T движения, сформированная блоком 303 формирования траекторий, передается в блок 304 управления движением. Блок 304 управления движением вычисляет соответствующую величину управления для рулевого управления, акселератора, тормоза и т.д. (ни одно не показано), так что рассматриваемое транспортное средство 10 может двигаться по принятой целевой траектории T движения. Помимо этого, модуль управления движением приводит в действие исполнительный механизм 40 на основе вычисленных величин управления. Хотя это и не показано, исполнительный механизм 40 состоит из исполнительного механизма рулевого управления, исполнительного механизма привода, исполнительного механизма тормоза и т.п.
[0017] Фиг. 2 является блок-схемой последовательности операций, иллюстрирующей процесс управления движением транспортного средства по первому варианту осуществления, который выполняется модулем 30 вычисления управления движением транспортного средства (точнее, процессором, встроенным в модуль 30 вычисления управления движением транспортного средства). Проиллюстрированная на фиг. 2 блок-схема выполняется, когда удовлетворяется начальное условие для управления следованием за движущимся впереди транспортным средством. То, удовлетворяется или нет начальное условие для управления следованием за движущимся впереди транспортным средством, определяется, когда движущееся впереди транспортное средство присутствует, и, например, на основе включенного/выключенного состояния переключателя выполнения для управления следованием за движущимся впереди транспортным средством, который предусмотрен в водительском сиденьи рассматриваемого транспортного средства 10, либо на основе режима движения.
[0018] Сначала, на этапе S31, движущееся впереди транспортное средство обнаруживается посредством датчика 21 обнаружения объектов и модуля 24 вычисления для распознавания объектов.
[0019] На этапе S32 блок 301 вычисления областей возможного движения вычисляет область возможного движения, имеющуюся между рассматриваемым транспортным средством 10 и движущимся впереди транспортным средством, обнаруженным на этапе S31, в качестве первой области A. В частности, в качестве первой области A вычисляется траектория движения, по которой движущееся впереди транспортное средство фактически движется между текущей позицией рассматриваемого транспортного средства и текущей позицией движущегося впереди транспортного средства. Это обусловлено тем, что область, основанная на траектории, по которой движущееся впереди транспортное средство уже двигалось, также может определяться в качестве «проезжей» (т.е. области возможного движения) для рассматриваемого транспортного средства 10. Первая область может быть самой траекторией движения (т.е. соответствующей только ширине движущегося впереди транспортного средства), областью, в которой траектория движения расширяется до ширины полосы движения, или может устанавливаться равной некой промежуточной ширине между ними.
[0020] На этапе S33 блок 301 вычисления областей возможного движения устанавливает область возможного движения, вычисленную вплоть до предыдущего времени, в качестве второй области B. То есть, вся та область, которая определена как «проезжая» в контуре обработки непосредственно перед текущим контуром обработки, считывается из запоминающего устройства 302 и устанавливается в качестве описанной выше второй области B.
[0021] Помимо этого, в процессе этапа S33 первого варианта осуществления, первая и вторая области и т.д. вычисляются на основе относительных координат с рассматриваемым транспортным средством 10 в качестве начала координат. Таким образом, на этапе S33, когда область возможного движения рассматриваемого транспортного средства 10 вплоть до предыдущего времени устанавливается в качестве второй области B, осуществляется координатное преобразование, которое соответствует величине перемещения и направлению перемещения рассматриваемого транспортного средства 10 между предыдущим временем и текущим временем.
[0022] Описанное выше координатное преобразование может быть осуществлено вычислением величины перемещения и направления перемещения рассматриваемого транспортного средства 10 посредством счисления пути из выходных сигналов датчика 22 скорости вращения колес и датчика 23 скорости рыскания. Альтернативно, координатное преобразование может быть осуществлено вычислением величины перемещения и направления перемещения рассматриваемого транспортного средства 10 посредством одометрии из выходного сигнала датчика 22 скорости вращения колес.
[0023] Затем, на этапе S34, первая область A, вычисленная на этапе S32, и вторая область B, вычисленная на этапе S33, суммируются, чтобы вычислить область C возможного движения. То есть, область C возможного движения указывает всю ту область, которая может быть определена как «проезжая сейчас» (т.е. текущая область возможного движения). Результат вычисления этапа S34 сохраняется в запоминающем устройстве 302 и используется тогда, когда вторая область B устанавливается в последующем контуре обработки.
[0024] На этапе S35 блок 303 формирования траекторий формирует целевую траекторию T движения рассматриваемого транспортного средства 10 в центральной зоне в пределах области C возможного движения, вычисленной на этапе S34. В настоящем раскрытии центральная зона означает зону, полученную расширением центральной линии области C возможного движения на предписанную величину (например, на половину ширины транспортного средства для рассматриваемого транспортного средства 10).
[0025] На этапе S36 осуществляется управление следованием, которое управляет движением рассматриваемого транспортного средства 10 по целевой траектории T движения, сформированной на этапе S35. В частности, как описано выше, блок 304 управления движением вычисляет величины управления, такие как руление, в соответствии с целевой траекторией T движения и приводит в действие исполнительный механизм 40 на основе вычисленных величин управления, тем самым добиваясь управления следованием.
[0026] Затем, на этапе S37, определяется то, должно ли или нет прекращаться управление следованием. Если результат является отрицательным, процесс возвращается к этапу S31 и повторяет описанный выше процесс. Если результат является утвердительным, процесс управления движением рассматриваемого транспортного средства завершается. То, должно или нет прекращаться управление следованием, определяется на основе того, удовлетворяется ли или нет начальное условие для управления следованием за движущимся впереди транспортным средством.
[0027] Если во время выполнения блок-схемы последовательности операций по фиг. 2 происходит смена движущегося впереди транспортного средства, то произошедшая смена движущегося впереди транспортного средства обнаруживается модулем 24 вычисления для распознавания объектов на этапе S31, и на следующем этапе S32 первая область A вычисляется на основе нового движущегося впереди транспортного средства.
[0028] В дальнейшем описанная выше обработка блоком 301 вычисления областей возможного движения (этапы S32-S34) будет описана со ссылкой на фиг. 3 и 4.
[0029] Фиг. 3 иллюстрирует ситуацию примерно в то время, когда происходит вклинивание движущегося впереди транспортного средства, организованную в хронологическом порядке. До того, как происходит вклинивание движущегося впереди транспортного средства (фиг. 3 слева), блок 301 вычисления областей возможного движения вычисляет первую область A на основе траектории движения текущего движущегося впереди транспортного средства 100. Если имеется область возможного движения, которая вычислена в предыдущем контуре обработки, упомянутая область возможного движения устанавливается в качестве второй области B, и первая область A и вторая область B суммируются, чтобы вычислить текущую область C возможного движения. Поскольку ситуация, показанная с левой стороны на фиг. 3, указывает первый процесс выполнения блок-схемы последовательности операций по фиг. 2, вторая область B не присутствует. Поэтому первая область A становится текущей областью C возможного движения.
[0030] После этого, если другое транспортное средство (новое движущееся впереди транспортное средство 110) вклинивается между рассматриваемым транспортным средством 10 и движущимся впереди транспортным средством 100 (фиг. 3, средняя часть), блок 301 вычисления областей возможного движения вычисляет новую первую область A на основе траектории движения нового движущегося впереди транспортного средства 110. Помимо этого, блок 301 вычисления областей возможного движения устанавливает ту область, которая была областью возможного движения рассматриваемого транспортного средства 10 вплоть до предыдущего времени, вычисленную на основе траектории движения движущегося впереди транспортного средства 100, в качестве второй области B и суммирует первую область A и вторую область B, вычисляя текущую область C возможного движения.
[0031] В последующем контуре обработки (фиг. 3 справа) блок 301 вычисления областей возможного движения аналогично вычисляет первую область A на основе текущей позиции нового движущегося впереди транспортного средства 110 и его траектории движения, устанавливает предыдущую область возможного движения в качестве второй области B и суммирует первую область A и вторую область B, вычисляя текущую область C возможного движения.
[0032] Как описано выше, в этом варианте осуществления, когда движущееся впереди транспортное средство 100 сменяется на новое движущееся впереди транспортное средство 110, текущая область C возможного движения устанавливается с учетом второй области B, которая представляет собой предыдущую область возможного движения. Соответственно, можно подавить большое изменение области C возможного движения и подавить значительное изменение поведения рассматриваемого транспортного средства 10, даже когда движущееся впереди транспортное средство сменяется. Кроме того, поскольку усиление при управлении следованием не изменяется, способность следовать за движущимся впереди транспортным средством не уменьшается.
[0033] Фиг. 4 иллюстрирует модифицированный пример случая, в котором вычисляется текущая область C возможного движения. В модифицированном примере, показанном на фиг. 4, уступы (внутренние угловые участки 50), которые образуются при суммировании первой области A и второй области B, компенсируются. Здесь, в компенсированной области C возможного движения, угол α, образованный между граничной линией L1, которая образована компенсирующим участком 51, и граничной линией L2, которая является примыкающей к компенсирующему участку 51, устанавливается так, что он становится все более малым по мере того, как скорость рассматриваемого транспортного средства 10 увеличивается.
[0034] Описанный выше процесс компенсации может выполняться для всех уступов (внутренних угловых участков 50), которые образуются при суммировании первой области A и второй области B, как проиллюстрировано на фиг. 4, но выполняются по меньшей мере в отношении тех уступов, которые присутствуют в направлении движения рассматриваемого транспортного средства 10.
[0035] За счет такой компенсации уступов (внутренних угловых участков 50) области C возможного движения, как в этом модифицированном примере, формируемая в пределах области C возможного движения целевая траектория T движения рассматриваемого транспортного средства 10 может быть сделана более плавной.
[0036] Кроме того, дискомфорт, испытываемый пассажиром, когда целевая траектория T движения сдвигается в поперечном направлении, увеличивается по мере того, как увеличивается скорость рассматриваемого транспортного средства 10. Таким образом, можно уменьшать величину сдвига целевой траектории T движения в поперечном направлении и тем самым уменьшать описанный выше дискомфорт, устанавливая вышеописанный угол α меньшим по мере того, как скорость рассматриваемого транспортного средства 10 увеличивается.
[0037] Далее процесс формирования траекторий, выполняемый описанным выше блоком 303 формирования траекторий, будет описан со ссылкой на фиг. 5-7. Фиг. 5 показывает идентичную ситуацию, что и показанная на фиг. 3.
[0038] Блок 303 формирования траекторий формирует целевую траекторию T движения в центральной зоне области C возможного движения в этот момент времени, как проиллюстрировано на фиг. 5. В частности, задается потенциальный риск рассматриваемого транспортного средства 10 в отношении помех для каждой точки в пределах области C возможного движения, и траектория движения, для которой этот потенциальный риск становится минимальным значением, устанавливается в качестве целевой траектории T движения, как проиллюстрировано на фиг. 6 и 7.
[0039] Например, если потенциальный риск задается с использованием квадратической функции, значение потенциального риска на левой и правой границах области C возможного движения устанавливается равным 1 (максимальному значению), а значение потенциального риска в центре области C возможного движения относительно направления по ширине транспортного средства устанавливается равным 0 (минимальному значению). Блок 303 формирования траекторий учитывает все потенциальные риски для каждой точки в пределах области C возможного движения и определяет траекторию, для которой сумма значений потенциального риска становится наименьшей, посредством известного алгоритма оптимизации (например, метода наименьших квадратов).
[0040] Потенциальный риск не ограничен его заданием квадратической функцией, но также может задаваться биквадратной функцией, как проиллюстрировано на фиг. 7. Помимо этого, значение потенциального риска может быть установлено равным минимальному значению (постоянному значению), если в пределах заданного диапазона от центра области C возможного движения относительно направления по ширине транспортного средства. Кроме того, не является обязательным, чтобы задающая потенциальный риск функция была симметричной; значение потенциального риска может отличаться слева и справа в зависимости от пути движения рассматриваемого транспортного средства 10. Например, когда рассматриваемое транспортное средство 10 движется в крайней левой полосе движения трехполосной дороги относительно направления движения, риск того, что рассматриваемое транспортное средство 10 отклонится от дороги, может быть уменьшен посредством установки более высокого значения потенциального риска на левой стороне.
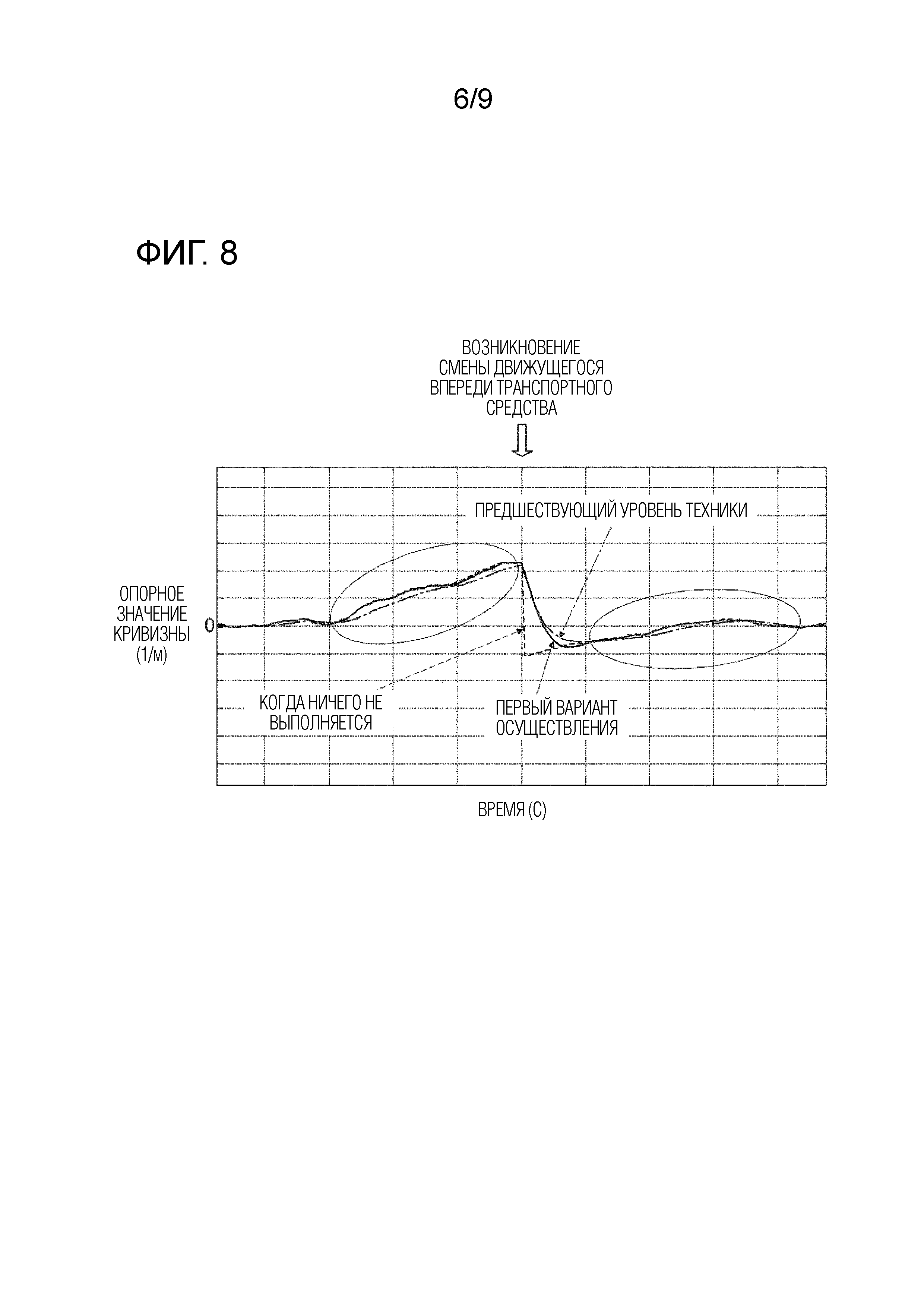
[0041] Далее количественный эффект управления движением транспортного средства согласно первому варианту осуществления будет описан со ссылкой на фиг. 8. На фиг. 8 вертикальная ось представляет кривизну траектории движения рассматриваемого транспортного средства 10, а горизонтальная ось - время. Поведение в том случае, когда выполняется управление движением транспортного средства по первому варианту осуществления, указано сплошной линией, поведение в том случае, когда выполняется нормальное управление следованием, указано пунктирной линией, и поведение в том случае, когда выполняется управление, раскрытое в патентном документе 1, указано штрихпунктирной линией с одной точкой.
[0042] Как описано выше, согласно управлению, раскрытому в патентном документе 1, поскольку усиление управления следованием устанавливается низким, можно подавлять значительное изменение поведения транспортного средства при смене движущегося впереди транспортного средства. Тем не менее, как указано кружком на фиг. 8, скорость отклика уменьшается относительно нормального управления следованием. Напротив, когда выполняется управление движением транспортного средства согласно первому варианту осуществления, уменьшение скорости отклика, как видно выше, не возникает. Кроме того, как и в случае с раскрытым в патентном документе 1 методом, можно подавлять значительное изменение поведения рассматриваемого транспортного средства 10, когда движущееся впереди транспортное средство сменяется.
[0043] Фиг. 9 является пояснительным видом для пояснения другого модифицированного примера процесса вычисления областей возможного движения согласно первому варианту осуществления. В этом модифицированном примере, после того, как вычислена текущая область C возможного движения, направление по ширине транспортного средства области C возможного движения уменьшается по размеру наполовину (W/2) ширины W рассматриваемого транспортного средства 10 от каждой из левой и правой границ.
[0044] То есть, при создании целевой траектории T движения эта целевая траектория T движения формируется с учетом ширины W рассматриваемого транспортного средства 10 таким образом, что рассматриваемое транспортное средство 10 может надежно двигаться в пределах области C возможного движения. Другими словами, целевая траектория T движения не должна формироваться в пределах диапазона в половину (W/2) ширины транспортного средства от левой и правой границ области C возможного движения. Следовательно, в этом модифицированном примере, при формировании целевой траектории T движения удаляются заранее области, соответствующие половине (W/2) ширины W рассматриваемого транспортного средства 10 от левой и правой границ области C возможного движения в направлении по ширине транспортного средства. В результате можно уменьшить нагрузку по обработке вычислений на блок 303 формирования траекторий.
[0045] Нижеперечисленные эффекты могут быть получены с помощью способа управления движением транспортного средства и устройства управления движением транспортного средства согласно описанному выше первому варианту осуществления.
[0046] (1) Способ управления движением транспортного средства для управления рассматриваемым транспортным средством 10 так, что оно следует за движущимся впереди транспортным средством 100, содержит: вычисление первой области A, в которой рассматриваемое транспортное средство 10 может вероятно двигаться, из траектории движения нового движущегося впереди транспортного средства 110 (этап S32), при обнаружении вклинивания нового движущегося впереди транспортного средства 110 между движущимся впереди транспортным средством 100 и рассматриваемым транспортным средством 10 (этап S31); установление области возможного движения рассматриваемого транспортного средства 10 вплоть до предыдущего времени в качестве второй области B (этап S33); суммирование первой области A и второй области B для задания области C возможного движения (этап S34); формирование целевой траектории T движения рассматриваемого транспортного средства 10 в пределах заданной области C возможного движения (этап S35); и управление рассматриваемым транспортным средством 10 по сформированной целевой траектории T движения (этап S36).
[0047] То есть, когда движущееся впереди транспортное средство 100 сменяется на новое движущееся впереди транспортное средство 110, текущая область C возможного движения устанавливается с учетом второй области B, которая представляет собой предыдущую область возможного движения. Таким образом, можно подавлять большое изменение области C возможного движения и подавлять значительное изменение поведения рассматриваемого транспортного средства 10, даже когда движущееся впереди транспортное средство сменяется.
[0048] (2) В дополнение, целевую траекторию T движения формируют в центральной зоне в пределах области C возможного движения (этап S35, фиг. 5-7). Следовательно, помимо эффекта по (1), можно формировать плавную целевую траекторию T движения.
[0049] (3) В дополнение, компенсируют внутренний угловой участок 50 заданной области C возможного движения компенсирующим участком 51 и формируют целевую траекторию T движения в пределах компенсированной области C возможного движения (этапы S34-S35, фиг. 4). Следовательно, можно исключить уступ (внутренний угловой участок 50) в пределах области C возможного движения и сформировать более плавную целевую траекторию T движения.
[0050] (4) В дополнение, компенсацию устанавливают таким образом, что в компенсированной области C возможного движения угол α, образованный между граничной линией L1, которая образована компенсирующим участком 51, и граничной линией L2, которая является примыкающей к компенсирующему участку 51, становится меньшим по мере того, как скорость рассматриваемого транспортного средства 10 увеличивается (этапы S34, фиг. 4). То есть, поскольку дискомфорт, который испытывает пассажир в отношении поведения в поперечном направлении, увеличивается по мере увеличения скорости рассматриваемого транспортного средства 10, расширение области C возможного движения в поперечном направлении вследствие компенсирующего участка 51 выполняют с уменьшением по мере того, как скорость рассматриваемого транспортного средства 10 увеличивается. В результате, помимо эффекта по (3), можно уменьшить величину сдвига целевой траектории T движения в поперечном направлении и тем самым уменьшить описанный выше дискомфорт.
[0051] (5) В дополнение, задают потенциальный риск в отношении помех в окрестности рассматриваемого транспортного средства 10 на основе границ в области C возможного движения в направлении по ширине рассматриваемого транспортного средства 10, и путь, при котором заданный потенциальный риск становится наименьшим, устанавливают в качестве целевой траектории T движения (этап S35, фиг. 6 и 7). Следовательно, помимо эффектов по (1)-(4), можно формировать более плавную целевую траекторию T движения.
[0052] (6) В дополнение, потенциальный риск задают с использованием квадратической функции, значение потенциального риска на границах в направлении по ширине транспортного средства задают равным 1, а значение потенциального риска в центре относительно направления по ширине транспортного средства задают равным 0 (этап S35, фиг. 6 и 7). Следовательно, помимо эффекта по (5), можно более надежно предотвращать отклонение рассматриваемого транспортного средства 10 от области C возможного движения и дополнительно упрощать процесс вычисления для формирования целевой траектории T движения.
[0053] (7) В дополнение, потенциальный риск задают с использованием квадратической функции, и путь, при котором потенциальный риск становится наименьшим, определяют на основе метода наименьших квадратов (этап S35, фиг. 6 и 7). Следовательно, помимо эффектов по (5) и (6), становится необязательным многократно осуществлять вычисление, и может быть реализован более быстрый процесс вычисления.
[0054] (8) В дополнение, в устройстве управления движением транспортного средства (системе 1 управления движением транспортного средства), которое имеет контроллер (модуль 30 вычисления управления движением транспортного средства), который управляет рассматриваемым транспортным средством 10 по целевой траектории T движения, сформированной таким образом, чтобы следовать за движущимся впереди транспортным средством, контроллер 30 содержит: блок обнаружения (датчик 21 обнаружения объектов, модуль 24 вычисления для распознавания объектов), который обнаруживает то, происходит ли или нет вклинивание нового движущегося впереди транспортного средства 110 между движущимся впереди транспортным средством 100 и рассматриваемым транспортным средством 10; блок вычисления, который вычисляет первую область A, в которой рассматриваемое транспортное средство 10 может вероятно двигаться, из траектории движения нового движущегося впереди транспортного средства 110; блок установок (блок 301 вычисления областей возможного движения), который устанавливает область возможного движения вплоть до предыдущего времени в качестве второй области B; блок задания областей (блок 301 вычисления областей возможного движения) для суммирования первой области A и второй области B, чтобы задавать область C возможного движения (блок 301 вычисления областей возможного движения); и блок формирования (блок 303 формирования траекторий) для формирования целевой траектории T движения рассматриваемого транспортного средства 10 в пределах области C возможного движения.
[0055] То есть, когда движущееся впереди транспортное средство 100 сменяется на новое движущееся впереди транспортное средство 110, текущую область C возможного движения устанавливают с учетом второй области B, которая представляет собой предыдущую область возможного движения. Следовательно, можно подавлять большое изменение области C возможного движения и подавлять значительное изменение поведения рассматриваемого транспортного средства 10, даже когда движущееся впереди транспортное средство сменяется.
Второй вариант осуществления
[0056] Далее способ управления движением транспортного средства и устройство управления движением транспортного средства согласно второму варианту осуществления настоящего изобретения будут описаны со ссылкой на фиг. 10 и 11. Система управления движением транспортного средства согласно второму варианту осуществления имеет ту же конфигурацию, что и система 1 управления движением транспортного средства согласно первому варианту осуществления, так что подробное описание опущено.
[0057] Фиг. 10 является блок-схемой последовательности операций, иллюстрирующей процесс управления движением транспортного средства по второму варианту осуществления, который выполняется модулем 30 вычисления управления движением транспортного средства согласно второму варианту осуществления. Блок-схема последовательности операций, проиллюстрированная на фиг. 10, выполняется тогда, когда удовлетворяется начальное условие для управления следованием за движущимся впереди транспортным средством, аналогично фиг. 2.
[0058] Сначала, от этапов S51-S53, выполняется процесс, идентичный процессу с этапов S31-S33 на фиг. 2. Затем задается виртуальная вторая область B' на этапе S54. В частности, в качестве виртуальной второй области B' задают область, полученную расширением установленной на этапе S53 второй области B на предписанную ширину в направлении по ширине транспортного средства.
[0059] На этапе S55 текущая область C возможного движения вычисляется на основе первой области A, вычисленной на этапе S52, второй области B, установленной на этапе S53, и виртуальной второй области B', установленной на этапе S54. В частности, со второй областью B суммируют только ту область первой области A, которая перекрывается с виртуальной второй областью B' (указана как область A и B' на фиг. 11), задавая текущую область C возможного движения, как проиллюстрировано на фиг. 11.
[0060] Достаточно, если текущая область C возможного движения может в конечном счете быть установлена описанным выше образом; в силу этого означенный процесс не ограничен вышеприведенным. Например, первая область A и вторая область B могут добавляться сначала, аналогично первому варианту осуществления, а та область первой области A, которая не перекрывает виртуальную вторую область B' (область, отличная от A и B'), может удаляться.
[0061] На следующих этапах S56-S58 выполняется процесс, идентичный процессу с этапов S35-S37 на фиг. 2. Помимо этого, описанный выше процесс повторяется при условии, что результат этапа S58 является отрицательным.
[0062] То есть, в случае примера, показанного на фиг. 11, в последующем контуре обработки в качестве второй области B устанавливают область, указанную как область C на фиг. 11 (этап S53), а в качестве виртуальной второй области B' задают область, полученную расширением этой области на предписанную ширину (этап S54). Следовательно, при повторном выполнении процесса по фиг. 10, область, идентичная области C возможного движения по первому варианту осуществления, который был пояснен со ссылкой на фиг. 2, 3 и т.д., в конечном счете формируется в качестве области C возможного движения.
[0063] Нижеперечисленные эффекты могут быть получены с помощью способа управления движением транспортного средства и устройства управления движением транспортного средства согласно второму варианту осуществления.
[0064] (9) Задают виртуальную вторую область B', полученную расширением второй области B в направлении по ширине транспортного средства на предписанную ширину, (этап S54), и только ту область первой области A, которая перекрывает виртуальную вторую область B' (область A и B'), суммируют со второй областью B, задавая область C возможного движения (этап S55). То есть, текущая область C возможного движения не расширяется более чем на предписанную ширину от второй области B', которая представляет собой предыдущую область возможного движения. Соответственно, можно дополнительно подавлять большое изменение области C возможного движения и в силу этого дополнительно подавлять значительное изменение поведения рассматриваемого транспортного средства 10, даже когда движущееся впереди транспортное средство сменяется.
[0065] (10) В дополнение, суммируют первую область A и вторую область B, чтобы задавать область C возможного движения, задают виртуальную вторую область B', полученную расширением второй области B на предписанную ширину, а та область заданной области C возможного движения, которая не перекрывает виртуальную вторую область B', может удаляться. В этом случае также может быть получен тот же самый эффект, что и в (8).
[0066] Способ управления движением транспортного средства и устройство управления движением транспортного средства по настоящему изобретению были описаны выше на основе первого и второго вариантов осуществления, но их конкретные конфигурации не ограничены этими вариантами осуществления, и различные проектные модификации и добавления могут вноситься без отступления от объема изобретения согласно каждому пункту формулы изобретения.
[0067] В первом и втором вариантах осуществления в качестве примеров датчика 21 обнаружения объектов были приведены сканирующий лазерный радар и радар миллиметрового диапазона. Однако датчик 21 обнаружения объектов не ограничен этим. Например, датчиком обнаружения объектов может быть датчик, который обнаруживает объект на основе изображения перед транспортным средством, захваченного посредством камеры.
Пояснения к обозначениям ссылок
[0068] 1 - система управления движением транспортного средства, 10 - рассматриваемое транспортное средство, 100 - движущееся впереди транспортное средство, 110 - новое движущееся впереди транспортное средство, 21 - датчик обнаружения объектов (блок обнаружения), 24 - модуль вычисления для распознавания объектов, 30 - модуль вычисления управления движением транспортного средства (контроллер), 301 - блок вычисления областей возможного движения (блок вычисления, блок установок, блок задания областей), 303 - блок формирования траекторий (блок формирования)
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Способ генерирования целевой скорости транспортного средства и устройство генерирования целевой скорости транспортного средства для транспортного средства с содействием вождению
Способ генерации целевой скорости и устройство генерации целевой скорости транспортного средства с содействием вождению

