Результат интеллектуальной деятельности: Трёхсредный мобильный аппарат "Этажерка"
Вид РИД
Изобретение
Изобретение относится к трехсредным мобильным аппаратам, преимущественно роботам (дронам) с автоматическим, полуавтоматическим и ручным дистанционным управлением по радиоканалу с возможным локальным дублированием по гидроакустическому каналу) научно-исследовательского, военного, специального или гражданского назначений.
Широкое распространение получают не только сухопутные, воздушные и водные робототехнические самоходные транспортные средства, оснащенные различной бортовой аппаратурой (полезной нагрузкой), но и двух- или трехсредные.
Так, к широкому классу вездеходных транспортных средств относятся амфибийные (плавающие) транспортные средства, способные перемещаться как по суше, так и преодолевать водные преграды, главным образом, вплавь при положительной их плавучести, у которых корпус также, как минимум, двухфункционален - выполняет функции несущего элемента шасси, водоизмещающего элемента (с расчетной ватерлинией на уровне корпуса ниже верхних его кромок), и др., при этом емкость корпуса (внутренний его объем) гидроизолируют снизу и предусматривают аварийное устройство откачки воды из указанной емкости [Степанов А.П. Плавающие машины. - М.: Изд-во ДОСААФ, 1975, 192 с. - с. 11, рис. 7, с. 26, рис. 14, с. 181, рис. 105].
Среди аппаратов-аналогов известен сугубо водный дрон с плоской частично водоизмещающей платформой (герметичным корпусом), установленной на ней также плоской солнечной батареей (энергетическая установка) и системой управления внутри платформы, не считая наружной телескопической антенны [Четыре плавающих робота побили мировой рекорд дальности // http://nauka21vek.ru/archives/30273 (Выложено 16.03.2012 г.)].
Однако такое устройство не приспособлено для эксплуатации на суше (собственно, и такой задачи не ставилось).
Кстати, известны и другие водоизмещающие элементы, имеющие положительную плавучесть. В частности: подводно-надводный туристический аппарат с погруженной в воду центральной прозрачной обитаемой капсулой и прикрепленными к ней боковыми поплавками с облицовкой их верхней выпуклой поверхности фотоэлектрическими преобразователями [Подводная лодка Reef Explorer, работающая на солнечных батареях // http://be-active.com.ua/interesting/1028-reef-explorer.html]; стационарная солнечная электростанция, содержащая множество водоизмещающих поплавков типа «бакен», соединенных тросами или иной гибкой связью друг с другом, с якорем и индивидуальными подводными грузами-стабилизаторами [Солнечные батареи Marine Solar Cells на плаву // www.marineinsight.com (Выложено 14.11.2011 г.)].
Однако ни то, ни другое из этих устройств не относится к категории амфибийных аппаратов-роботов научно-исследовательского, военного или специального назначения.
Близким к заявляемому устройству аналогом является вездеходный транспортный аппарат - подвижная научно-исследовательская лаборатория с возможностью ручного дистанционного управления («Луноход»), содержащий самоходное шасси, по крайней мере, с сухопутным движителем (который в принципе может использоваться и как водоходный, но неспециализированно-водоходным, малоэффективным) и несущим корпусом, солнечную энергетическую установку с чашеобразным элементом с вогнутой поверхностью, и поворотно относительно несущего корпуса установленную на несущем корпусе выше его уровня, а также систему управления [Автоматические станции для изучения поверхностного покрова Луны / А.Л. Кемурджиан, В.В. Громов, И.И. Черкасов, В.В. Шварев. - М.: Машиностроение, 1976, 200 с. - С. 108-111].
Однако он выполнен сухопутным (не амфибийным), то есть односредным (поверхность Луны в условиях высокого вакуума). Если в конкретном практическом (и историческом) приложении «Луноход-1» и «Луноход-2» и не «нуждались» в амфибийных свойствах (плавучести, ходкости, маневренности и живучести на плаву) по причине отсутствии воды на Луне, то для других вероятных вездеходных транспортных роботов и, прежде всего, наземных, имя которым легион (научно-исследовательского, военного и специального назначения), отсутствие свойств амфибии может являться весьма существенным недостатком всего робототехнического комплекса.
При этом, в нем, по понятным причинам, отсутствуют аварийное водооткачивающее устройство, гидроизоляция чашеобразного элемента снизу от внутреннего свободного объема несущего корпуса шасси, специализированный водоходный движитель.
Отсюда (по совокупности) - констатация недостаточно высоких технико-эксплуатационных / тактико-технических характеристик аналога в расширительном смысле.
Другим близким к заявляемому устройству по назначению и количеству общих существенных конструктивных признаков аналогом является амфибийное транспортное средство («Автобус-амфибия с ветроэнергетической установкой и солнечной батареей»), содержащее самоходное шасси с универсальным сухопутно-водоходным движителем (колеса с выдвижными лопастями) и несущей рамой, элемент - кузов, солнечную энергетическую установку, установленную на элементе - кузове выше его уровня (на крыше), а также систему управления [RU 2006111355, МПК D60K 1/00, 10.11.2007].
Транспортное средство выполнено амфибийным, с положительной плавучестью и водозащитным исполнением шасси, при сохранении работоспособности транспортного средства в целом на плаву.
Однако оно является двухсредным, что ограничивает его мобильность и оперативность доставки в нужную географическую точку.
Наиболее близким к заявляемому устройству аналогом (прототипом) по назначению и совокупности существенных конструктивных признаков является, по мнению Заявителя, двухсредный мобильный аппарат (робот), содержащий амфибийный модуль в виде самоходного шасси с энергетической установкой и насосной станцией, а также с сухопутным и водоходным движителями, поплавковый модуль над сухопутным модулем, устройство взаимосвязи поплавкового и амфибийного модулей и систему управления роботом [RU 2615808, B60F 3/00, B60K 16/00, 11.04.2017].
В нем невозможны не только отделение амфибийного модуля от поплавкового с целью погружения на большую глубину или на дно водоема (упомянутое устройства взаимосвязи модулей выполнено с постоянной, т.е. не отключаемой в эксплуатации взаимосвязью), но и доставка и/или функционирование в воздушной среде. А при крутых или топких берегах с плохим сцеплением ходовой части, проблематично перемещение аппарата с поверхности земли в водоем и обратно.
Таким образом, известное устройство, принятое за прототип, еще недостаточно совершенно по своим технико-эксплуатационным (тактико-техническим) характеристикам.
Задача, на решение которой направлено заявляемое изобретение, заключается в повышении технико-эксплуатационных (тактико-технических) характеристик мобильного аппарата (робота, дрона) за счет расширения его возможностей.
Решение поставленной задачи достигается тем, что мобильный аппарат, содержащий амфибийный модуль в виде самоходного шасси с энергетической установкой и насосной станцией, а также с сухопутным и водоходным движителями, поплавковый модуль над амфибийным модулем, устройство взаимосвязи поплавкового и амфибийного модулей и систему управления роботом, согласно заявляемому изобретению, дополнительно снабжен летательным модулем вертикального взлета-посадки вертолетного типа над поплавковым модулем, с грузоподъемностью свыше веса остальной части робота, устройством взаимосвязи летательного и поплавкового модулей, а оба упомянутых устройства взаимосвязи модулей выполнены с возможностью независимой друг от друга обратимой расстыковки в эксплуатационных условиях.
В порядке решения поставленной задачи заявляемое устройство может характеризоваться следующими совокупностями дополнительных конструктивных признаков (при сформулированной выше основной совокупности признаков):
- в устройство взаимосвязи поплавкового и амфибийного модулей может быть встроена лебедка с тросово-кабельной гибкой связью указанных модулей, с возможностью регулирования дистанции между ними (это позволяет оперативно и дистанционно изменять/регулировать дистанцию между этими модулями по глубине, расширив тем самым возможности маневрирования и проникновения как на большие, так и на меньшие глубины, в последнем случае речь идет о работе поплавкового модуля, могущего также нести бортовую аппаратуру, на мели в плавающем состоянии; при этом кабельный компонент комплексной тросово-кабельной взаимосвязи обеспечивает сохранение электрической связи между этими модулями - единственной или дублирующей);
- в устройство взаимосвязи поплавкового и летательного модулей может быть встроена лебедка с тросово-кабельной гибкой связью указанных модулей, с возможностью регулирования дистанции между ними (это позволяет сохранять силовую механическую и/или электрическую взаимосвязь поплавкового и летательного модулей при переменной/регулируемой дистанции между этими модулями, то есть высоты зависания летательного модуля над поверхностью воды или земли);
- в каждое из упомянутых устройств взаимосвязи модулей встроена лебедка с тросово-кабельной гибкой связью указанных модулей;
- летательный блок может быть выполнен в виде мультикоптера (это позволяет оптимизировать летные способности заявляемого трехмодульного робота, основываясь на известных преимуществах квадро- и др. мультикоптеров);
- водоходный движитель и насосная станция могут быть конструктивно объединены в единую гидравлическую систему (это позволяет оду и ту же насосную станцию использовать как для откачки забортной воды из полостей аппарата, как это предусмотрено в прототипе, так и в качестве насоса водомета - с использованием последнего в качестве водоходного движителя);
- при любой совокупности конструктивных признаков из приведенных выше, система управления может быть выполнена дистанционной (это позволяет использовать преимущества дистанционных систем управления в приложении к данному устройству робота, что связано с конкретной ситуацией);
- при любой из первых пяти перечисленных совокупностей конструктивных признаков, система управления может быть выполнена полуавтоматической (это позволяет использовать преимущества полуавтоматических систем управления в приложении к данному устройству робота, что связано с конкретной ситуацией);
- при любой из первых пяти перечисленных совокупностей конструктивных признаков, система управления может быть выполнена автоматической (это позволяет использовать преимущества автоматических систем управления в приложении к данному устройству аппарата-робота, что связано с конкретной ситуацией и - назначением и экономической стороной вопроса).
Таким образом, показана причинно-следственная связь между существенными признаками заявляемого устройства и техническим результатом от использования этого устройства.
Среди известных устройств не обнаружены такие, совокупность существенных признаков которых совпадала бы с заявленной. В то же время, именно за счет последней достигается новый технический результат в соответствии с поставленной задачей.
Основную изобретательскую идею заявляемого технического решения можно сформулировать, иными словами, так: предлагается модульно-блочная «трехэтажная» структура аппарата (робота, дрона) с полным или, на гибкой взаимосвязи оперативно изменяемой (регулируемой) длины, обратимым отделением модулей друг от друга, с распределением в трехсредном пространстве, с сохранением информационно-управленческой связи по радио-, кабельному- и акустическому каналам.
Соответственно, имеет место «сверхэффект» в патентоведческом понимании этого термина и наличие изобретательского уровня заявляемого технического предложения (неочевидность для специалистов из достигнутого уровня науки и техники).
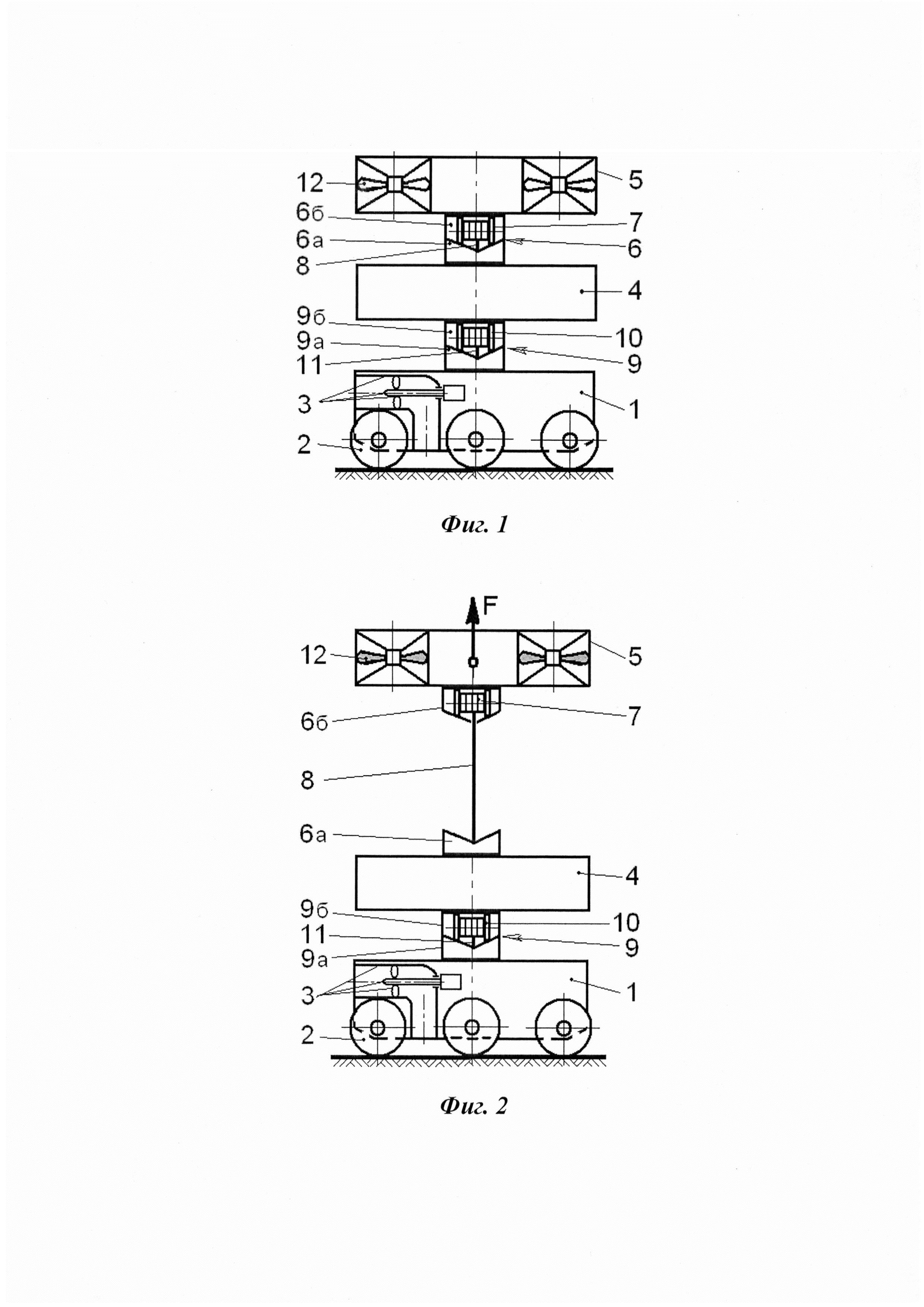
Заявляемое устройство пояснено на чертежах, где позициями обозначены: 1 - амфибийный модуль (самоходное шасси); 2 - сухопутный движитель (здесь - колесный 6×6); 3 - водоходный движитель (здесь - водомет как часть насосной станции); 4 - поплавковый модуль; 5 - летательный модуль (летательный аппарат вертикального взлета-посадки вертолетного типа (здесь - мультикоптер); 6 - разъемное устройство взаимосвязи модулей 1 и 4; 6н - нижняя часть устройства 6; 6в - верхняя часть устройства 6; 7 - лебедка устройства 6; 8 - гибкая связь лебедки 7 (силовая механическая и/или электрическая); 9 - разъемное устройство взаимосвязи модулей 4 и 5; 9н - нижняя часть устройства 9; 9в - верхняя часть устройства 9; 10 - лебедка устройства 9; 11 - гибкая связь лебедки 10 (силовая механическая и/или электрическая); 12 - винты модуля 5.
Условные обозначения на чертежах и в описании:
WW - поверхность водоема;
WL - действующая ватерлиния аппарата;
F - вектор подъемной силы винтов 12.
На фиг. 1 упрощенно, схематически (блок-схемами) показан трехсредный мобильный аппарат (робот, дрон) «Этажерка», в компактном состоянии на суше, вид сбоку (справа);
на фиг. 2 - то же, при разомкнутом устройстве взаимосвязи и стравленной гибкой связи летательного и поплавкового модулей;
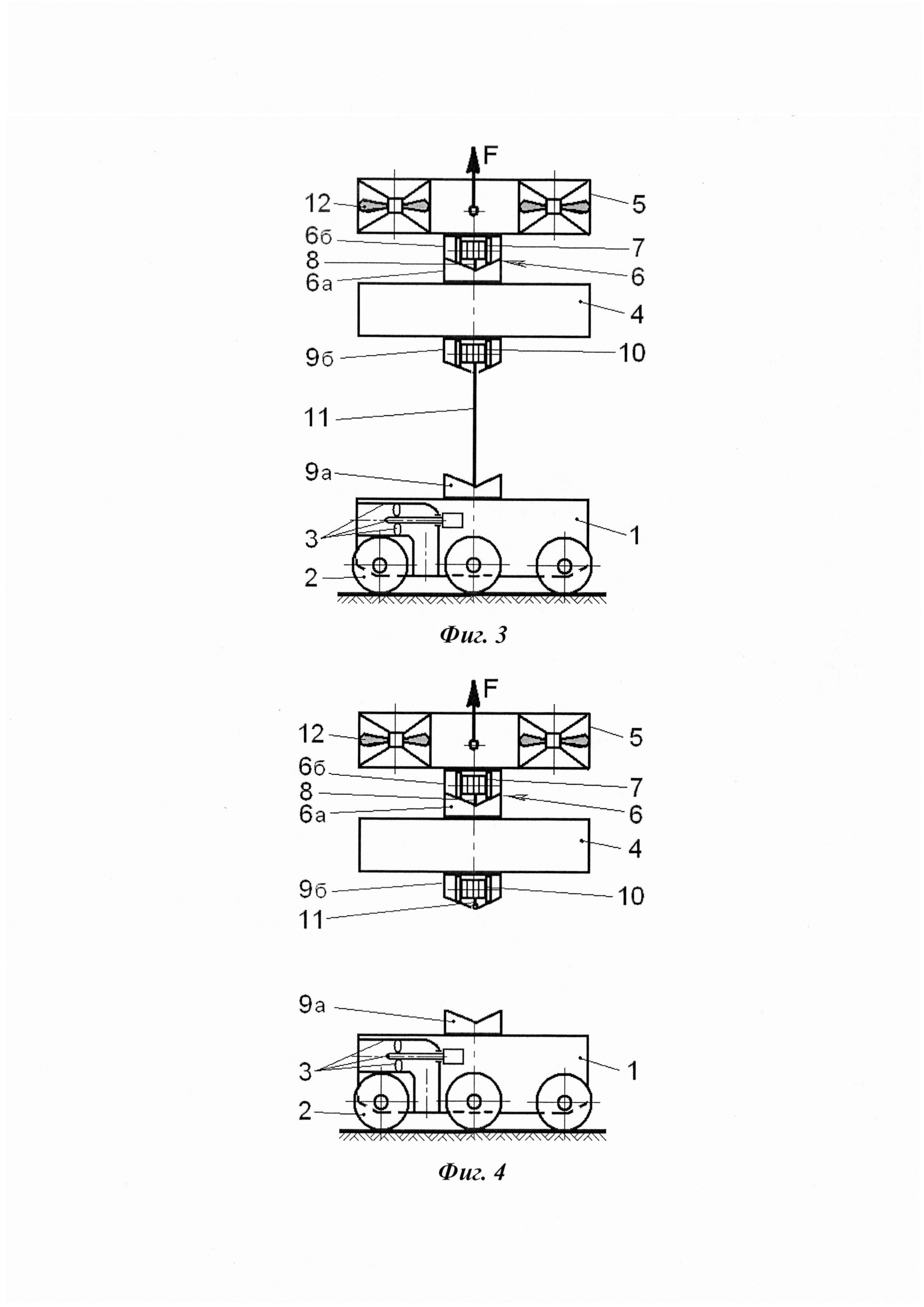
на фиг. 3 - то же, при разомкнутом устройстве взаимосвязи и стравленной гибкой связи амфибийного и поплавкового модулей;
на фиг. 4 - то же, при разомкнутом устройстве взаимосвязи и отсоединенном конце гибкой связи амфибийного и поплавкового модулей;
на фиг. 5 - трехсредный мобильный аппарат (робот, дрон) «Этажерка», в компактном состоянии в воздухе над поверхностью суши и/или водоема, вид сбоку (справа);
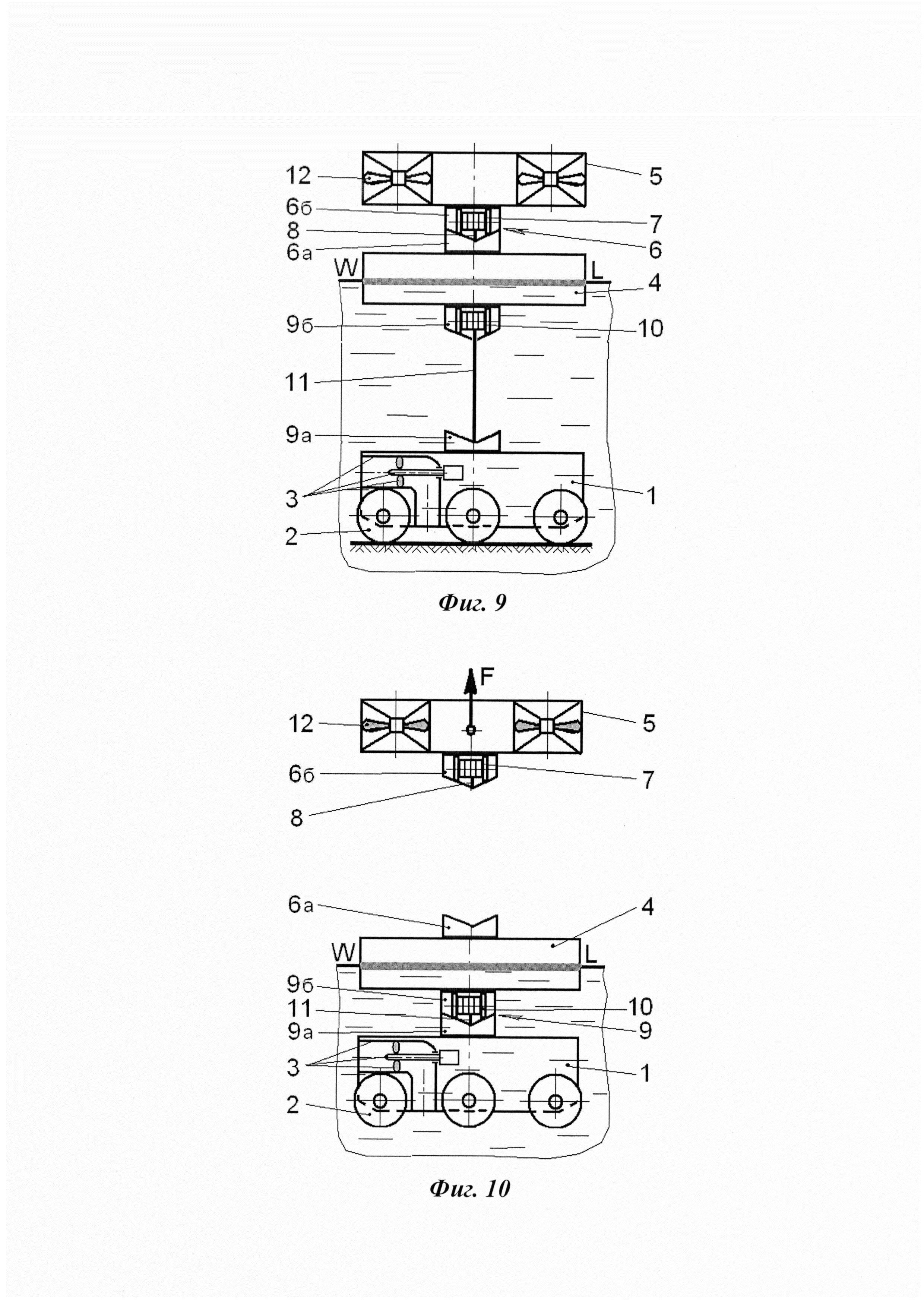
на фиг. 6 - трехсредный мобильный аппарат (робот, дрон) «Этажерка», в компактном состоянии на плаву в водоеме, вид сбоку (справа);
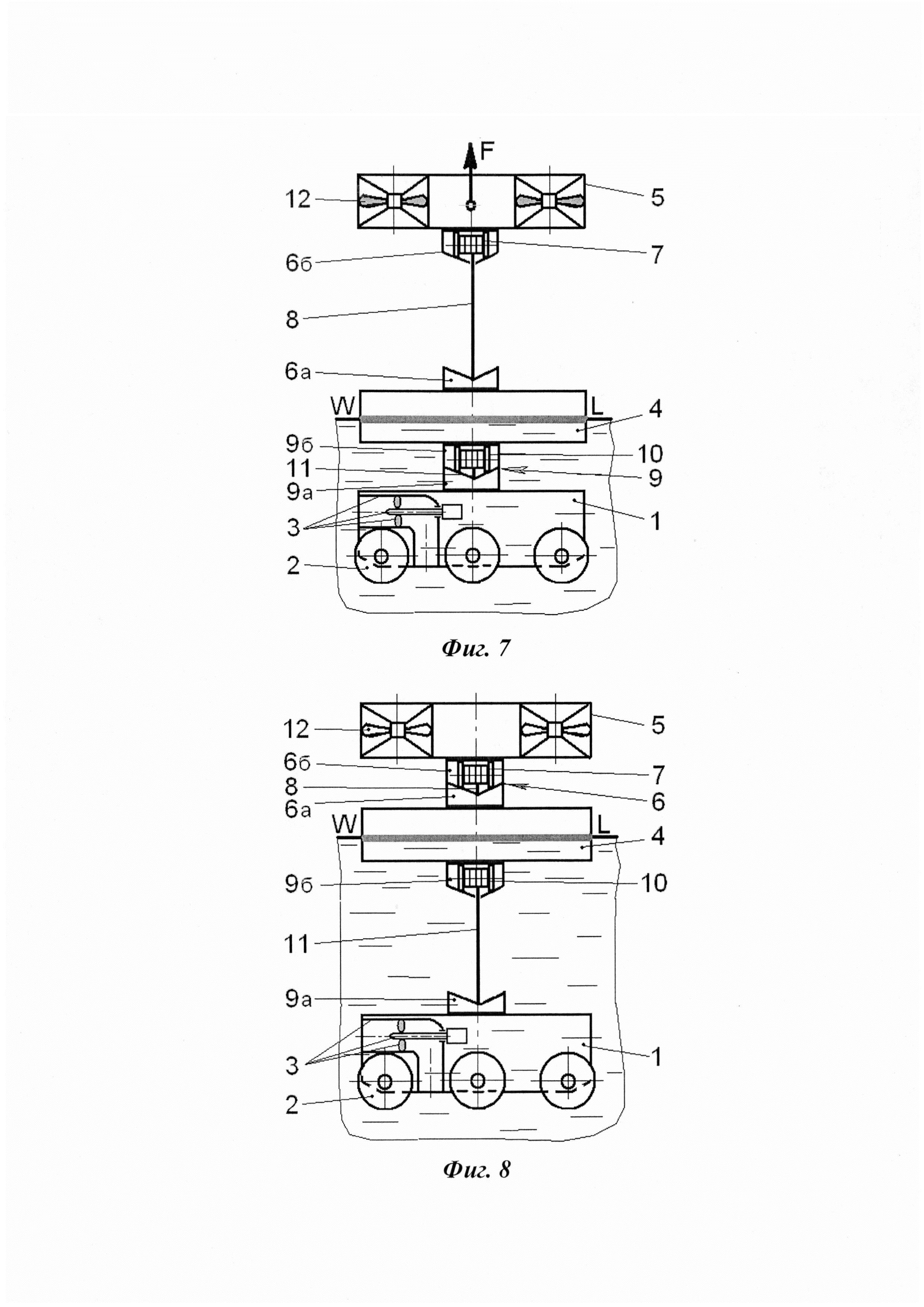
на фиг. 7 - то же, при разомкнутом устройстве взаимосвязи и стравленной гибкой связи летательного и поплавкового модулей;
на фиг. 8 - аналогично фигуре 4, но над водой свободным летательным модулем и в воде остальными модулями;
на фиг. 9 - аналогично фигуре 8, но при взаимодействии ходовой части (колес) амфибийного блока с дном водоема;
на фиг. 10 - аналогично фигуре 6, но при полном отделении летательного модуля от остальных модулей.
Трехсредный мобильный аппарат содержит амфибийный модуль 1 в виде самоходного шасси с энергетической установкой (двигатель с источником питания - не показаны) и насосной станцией (фрагмент - см. поз. 3), а также с сухопутным движителем 2 (здесь - колесный 6×6) и водоходным движителем 3 (здесь -водомет 3). Над амфибийным модулем 1 расположен поплавковый модуль 4. Они взаимосвязаны посредством устройства 6 взаимосвязи поплавкового 4 и амфибийного 1 модулей. Устройство 6 выполнено из нижней 6а и верхней 66 частей с возможностью их разъединения/соединения по командам от система управления (СУ) роботом (не показана).
Аппарат дополнительно снабжен летательным модулем 5 вертикального взлета-посадки вертолетного типа, расположенным над поплавковым модулем 4. По сути это, как правило, БПЛА (летающий робот, дрон). Его грузоподъемность превышает вес остальной части аппарата. Модули 5 и 4 взаимосвязаны посредством устройства 9 взаимосвязи летательного 5 и поплавкового 4 модулей. Устройство 9 выполнено из нижней 9а и верхней 96 частей с возможностью их разъединения/соединения по командам от 9 СУ, то есть аналогично устройству 6.
Дальнейшее описание распространяется на частные, рациональные примеры заявляемого устройства.
В устройство 6 (в основном в его верхнюю часть 66) взаимосвязи поплавкового 4 и амфибийного 1 модулей встроена лебедка 7 с тросово-кабельной гибкой связью 8 модулей 1, 4, с возможностью регулирования (от СУ) дистанции между ними.
В устройство 9 взаимосвязи поплавкового 4 и летательного 5 модулей встроена лебедка 10 с тросово-кабельной гибкой связью 11 модулей 4, 5, с возможностью регулирования дистанции между ними.
Наличие лебедок в каком-либо одном устройстве - 6 или 9, следует рассматривать как альтернативный частный пример. Но они могут быть и одновременно, что представляется более предпочтительным как расширение технико-эксплуатационным возможностей.
Гибкая связь 8 и/или 11 может быть только тросовой (это - упрощенный/облегченный вариант предыдущего, когда значение имеет только силовая механическая взаимосвязь).
Летательный блок 5 выполнен в виде мультикоптера (здесь - квадрокоптер, то есть с четырьмя симметрично разнесенными винтами 12).
Водоходный движитель 3 и насосная станция (для откачки из полостей модулей 1 и 4, в общем случае, и/или нагнетания в них забортной воды, конструктивно объединены в единую гидравлическую систему.
В любом из описанных частных примеров система управления может быть выполнена дистанционной, полуавтоматической или автоматической.
Заявленное устройство работает следующим образом.
Аппарат доставляют к месту его работы, как правило, сперва на том или ином транспортном средстве (наземном, водном, воздушном - не показано), а затем (вторым, основным этапом) - в компактной (при неразъединенных устройствах 6, 9) трехмодульной опции, в полетном режиме за счет подъемной силы F и горизонтальной силы (составляющей силы) летательного модуля 5 (винты 12 вращаются), как это показано на фиг. 5 (горизонтальная сила не показана).
После посадки на сушу (см. фиг. 1) с целью работы на ней или дальнейшего въезда своим ходом в водоем и работы или маскировки там, амфибийный модуль 1, как правило, отсоединяют, посредством устройства 6, от поплавкового модуля 8. При этом летательный модуль 5 однозначно оказывается также отсоединенным от модуля 1, а гибкая связь 8 может быть как отсоединена от части 6а устройства 6, так и оставлена (см. фиг. 3, 4 соответственно). В последнем случае сохраняется возможность силовой механической и, одновременно, электрической и/или оптоволоконной связи между модулями 1 и 4. Дистанция между модулями 1 и 4 по высоте и/или горизонтального взаимного смещения может быть изменена (установлена, отрегулирована) стравливанием гибкой связи 8 вращением лебедки 7.
Сказанное в предыдущем абзаце относится и к взаимосвязи модулей 4 и 5 (применительно к устройству 9 с лебедкой 10).
Частные рабочие опции на суше приведены на фиг. 1-4), однако этим не исчерпывается число возможных сочетаний (остальные опции теперь уже становятся понятны без полного их изображения с комментариями).
Посадка на поверхность WW водоема сразу с воздуха и последующая работа аппарата осуществляется аналогичным образом (см. фиг. 6-10).
При этом поплавкомый модуль 4, как правило, используется по своему основному назначению - в качестве «поплавка» - во-первых, для обеспечения плавучести «мокрой» части аппарата, а во-вторых, для облегчения (дублирования по гидроакустическому каналу) электрической или радиосвязи амфибийного блока (в подводном положении в толще воды или на дне водоема) с летательным модулем 5 (см. фиг. 6-9).
В частности, поднявшийся на висоту стравленной гибкой связи 11 (а то и в два раза большую высоту за счет стравливания обеих гибких связей (11 и 8) при сохранении кабельной электрической связи, - серьезное «подспорье» в проблемах обзорности и качества связи, в том числе с ретрансляторами.
Для продольного перемещения модуля 1 под водой или по дну используют водоходный движитель 3 и/или сухопутный движитель 2. Последний можно использовать, например, для поворота модуля 1. Заглубление или подъем аппарата может осуществляться за счет изменения (насосной станцией) количества воды в полостях «мокрых» модулей.
Эвакуация аппарата с места работы осуществляется в обратной последовательности и производится, по-возможности, в компактной опции.
Возможность практической реализации аппарата обусловлена известностью и промышленной освоенностью всех основных компонентов аппарата - мульти-коптеров, и др. летательных аппаратом вертолетного типа, наземных шасси (в том числе с колесной формулой 6×6 и амфибий), разъемных устройств взаимосвязи твердых тел, лебедок с тросовыми и тросово-кабельными гибкими связями, водометы и др. водоходные движители амфибий, насосы и насосные станции, системы управления дистанционного, полуавтоматического и автоматического.
Не исключены другие устройства (варианты) в рамках заявляемых совокупностей существенных признаков.
Выбор конкретного варианта из предложенных при использовании изобретения зависит от спектра тактико-технических и экономических требований и производится в каждом конкретном случае.
Разработка не претендует на полное замещение такими устройствами близких аналогов. Устройство предназначено для ограниченного применения там, где может дать максимальную эффективность.
Использование изобретения позволяет повысить (улучшить) технико-эксплуатационные (тактико-технические) характеристики мобильного аппарата (робота, дрона) за счет расширения его возможностей.
Аппарат можно рассматривать и как своего рода «мини-мультиагентную» систему (характерную для современного состояния в военной робототехнике). Особенность такой мультиагентной системы - не «стая» и даже не «семья» роботов, а аппарат как совокупность удаляемых на расстояние или обратимо отделяемых полностью модулей при минимальном для множественности их количестве «три».
Предложение назвать аппарат «Этажеркой» обусловлено «трехэтажной архитектурой» конструкции: три блока-модуля расположены один над другим аналогично полкам этажерки.
Устройство для регулирования микроклимата
Физиотерапевтический бюстгальтер расширенного функционального назначения
Винтокрыл
Бронированный наземный транспортный комплекс
Способ управления поворотом наземного транспортного средства и самоходный минный разградитель
Способ разминирования минных полей и устройство для его осуществления
Бронированный объект с динамической защитой и электрооборудованием
Способ парашютного десантирования
Способ зарядки литий-ионного аккумулятора, разряженного ниже допустимого уровня
Гусеничная цепь ходовой части снегоболотоходного транспортного средства
Устройство для регулирования микроклимата
Физиотерапевтический бюстгальтер расширенного функционального назначения
Винтокрыл
Бронированный наземный транспортный комплекс
Способ управления поворотом наземного транспортного средства и самоходный минный разградитель
Способ разминирования минных полей и устройство для его осуществления
Бронированный объект с динамической защитой и электрооборудованием
Способ парашютного десантирования
Способ зарядки литий-ионного аккумулятора, разряженного ниже допустимого уровня
Гусеничная цепь ходовой части снегоболотоходного транспортного средства

