Результат интеллектуальной деятельности: УСТРОЙСТВО СТЯГИВАНИЯ СТЫКОВОЧНЫХ АГРЕГАТОВ КОСМИЧЕСКИХ АППАРАТОВ
Вид РИД
Изобретение
Изобретение относится к космической технике, в частности к стыковочным устройствам космических аппаратов (КА).
Известно устройство стягивания стыковочного механизма (СтМ) андрогинного периферийного агрегата стыковки (АПАС), описанный в книге B.C. Сыромятников. Стыковочные устройства космических аппаратов. - М.: Машиностроение, 1984. - 216 с. и в патенте RU (11)2131829 «Андрогинный периферийный агрегат стыковки (АПАС) и демпфер амортизационно-приводной системы для него». Кольцо стыковочного механизма стоит на шести штангах и для осуществления стыковки с ответным агрегатом выдвигается вперед, отслеживает рассогласование между осями агрегатов, после сцепки втягивается с помощью привода, стоящего на корпусе агрегата. Вращательное движение привода передается шарико-винтовым преобразователям (ШВП), установленным в штангах. Винт в ШВП может совершать и поступательное и вращательное движение, а гайка только вращательное. Шесть штанг СтМ делятся на пары, в каждой из которых винты связаны шестерней, а гайки - редукторами с общим валом.
Конструкция этого стыковочного механизма имеет следующие недостатки:
Применение дифференциальных механизмов значительно усложняет конструкцию и увеличивает инерционность стыковочного механизма, которая ухудшает условия сцепки.
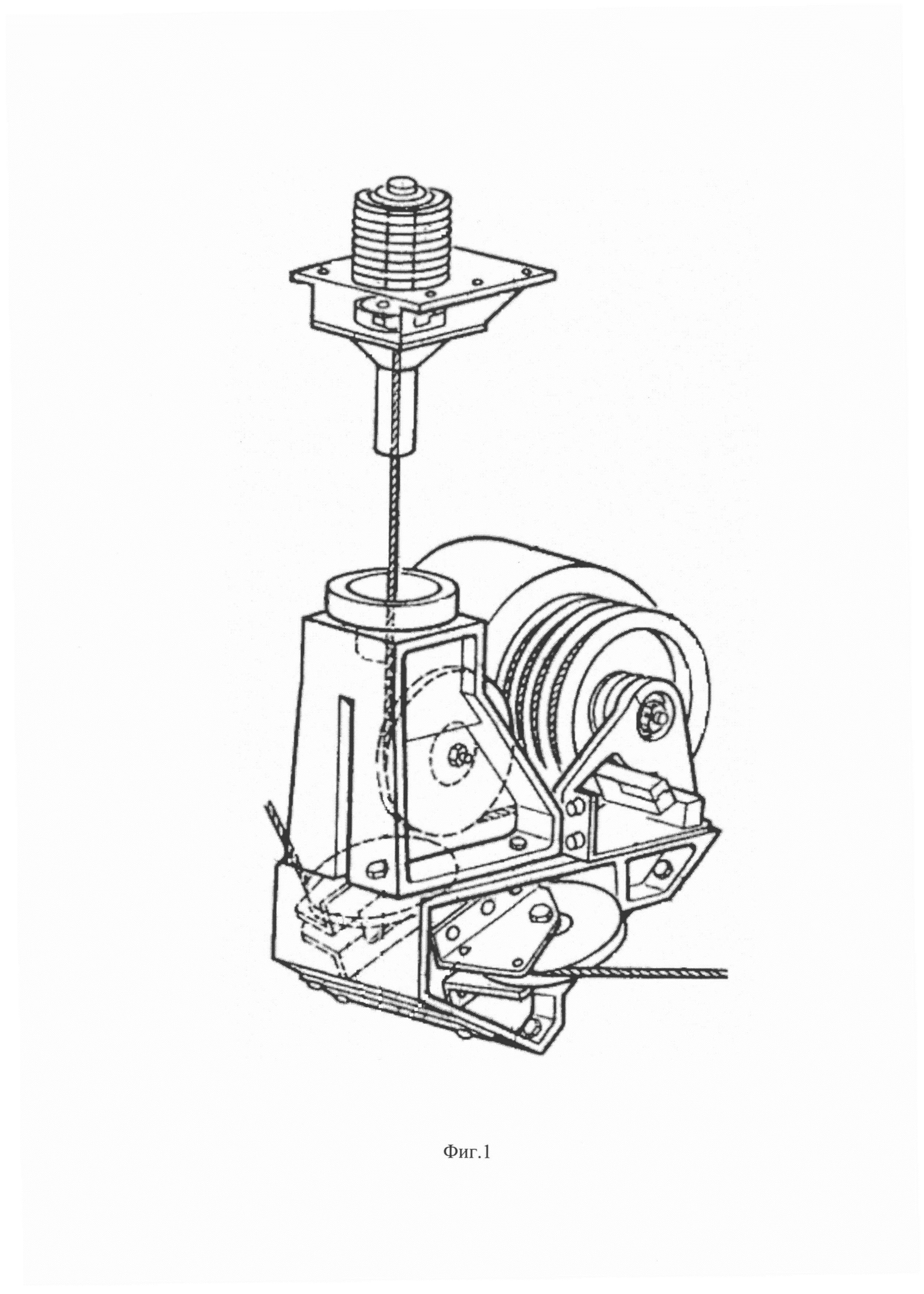
Известно устройство стягивания стыковочных агрегатов космических аппаратов (прототип) американского космического корабля «Аполлон», описанный в книге B.C. Сыромятников. Стыковочные устройства космических аппаратов. - М: Машиностроение, 1984. -41 с., в котором устройство стягивания стыковочных агрегатов космических аппаратов, содержащее механизмы защелок, установленные на выступах стыковочного кольца с направляющими для сцепки, штанги, установленные с возможностью движения независимо друг от друга, в которых штоки, одним своим концом связанные шарнирами первой группы со стыковочным кольцом, установлены с возможностью поступательного перемещения вдоль продольных осей корпусов штанг, основания которых связаны шарнирами второй группы с корпусом стыковочного агрегата, а также привод, расположенный на корпусе стыковочного агрегата, при этом каждый трос через направляющий ролик и элемент устранения разности длин тросов соединен с механизмом защелок на одном из выступов стыковочного кольца, (см. фиг. 1 - устройство стягивания с тросовой системой АПАС («Аполлон») в изометрии; фиг. 2- устройство стягивания с тросовой системой АПАС («Аполлон») в проекции).
Положение кольца стыковочного механизма (СтМ) (фиг. 1, фиг. 2) может быть изменено с помощью устройства стягивания стыковочного агрегата состоящего из привода, при этом каждый из трех тросов через направляющий ролик и тарельчатые пружины (пружина Бельвиля) устраняющие разность длин тросов, при сборке агрегата, соединен с корпусом механизма защелок, находящимся на одном из направляющих выступов стыковочного кольца и подается на барабан для намотки троса при стягивании.
В нерабочем состоянии стыковочный механизм находится во втянутом положении, то есть все штоки полностью втянуты, пружины всех его штанг максимально сжаты, а плоскость стыковочного кольца находится несколько ниже стыковочной плоскости агрегата. Втягивание СтМ в это положение производится одним приводом с помощью трех тросов разной длины, наматываемых на единый барабан намотки тросов, являющийся единственным на все тросы, расположенный на корпусе агрегата, при этом центрирующий штырь кольца при стягивании находится в центрирующем гнезде.
Перед стыковкой по команде блока управления СтМ переводится в выдвинутое положение, в котором штанги, их пружины и тросы имеют максимальную длину, а стыковочное кольцо максимально удалено от стыковочной плоскости стыковочного агрегата. Для этого блок управления подает команду на вращение привода в направлении увеличения длины тросов. В результате под действием сжатых пружин штанг все штоки выдвигаются из корпусов штанг и кольцо движется вперед вдоль продольной оси СтМ.
В начальной фазе стыковки при контактном взаимодействии стыковочного кольца с агрегатом пассивного КА СтМ смещается относительно своего полностью выдвинутого положения, при этом штоки входят в корпуса штанг и пружины временно сжимаются. После завершения демпфирования энергии сближения активного космических аппаратов (КА) силы сжатия пружин штанг постепенно возвращают штоки и СтМ в полностью выдвинутое положение. Далее по команде блока управления привод начинает вращать барабан в направлении уменьшения длины свободных тросов и переводит СтМ в полностью втянутое положение.
Недостатками конструкции являются:
Отсутствует устройство, которое убирает провисание тросов при сцепке, в режиме выключенного привода, что может привести к нештатной ситуации.
Длины тросов имеют разную длину, что приводит к трудностям в установке стыковочного кольца во втянутом и выдвинутом положениях.
Техническим результатом предлагаемого изобретения является устранение нештатных ситуаций, а именно исключение задевания тросов за выступающие элементы конструкции стыковочного агрегата, за счет исключения провисания тросов.
Технический результат достигается тем, что в устройство стягивания стыковочных агрегатов КА, содержащее механизмы защелок, установленные на выступах стыковочного кольца с направляющими для сцепки, штанги, установленные с возможностью движения независимо друг от друга, в которых штоки, одним своим концом связанные шарнирами первой группы со стыковочным кольцом, установлены с возможностью поступательного перемещения вдоль продольных осей корпусов штанг, основания которых связаны шарнирами второй группы с корпусом стыковочного агрегата, а также привод, расположенный на корпусе стыковочного агрегата, при этом каждый трос через направляющий ролик и элемент устранения разности длин тросов соединен с механизмом защелок на одном из выступов стыковочного кольца, в отличие от прототипа, дополнительно введены барабаны намотки троса в соответствии с количеством тросов, установленные на корпусе стыковочного агрегата в центре неподвижного основания, и соединенные между собой механизмом передачи крутящего момента, выполненным в виде входного вала передачи момента от редуктора, на котором установлены выходные валы передачи момента от редуктора, количество которых соответствует количеству тросов, а также шлицевой втулки, установленной между силовой ступенью редуктора привода и входным валом передачи момента от редуктора, при этом силовая ступень редуктора привода размещена внутри привода, размещенного в центре неподвижного основания, каждый барабан намотки троса, входной вал передачи момента от редуктора, выходные валы передачи момента от редуктора и привод размещены на главной оси корпуса стыковочного агрегата, а тросы выполнены равной длины, причем дополнительно введен элемент выборки слабины троса, размещенный между барабаном намотки троса и выходным валом редуктора привода. Суть изобретения поясняется графическими материалами, на которых приведены:
на фиг. 1 - устройство стягивания с тросовой системой АПАС («Аполлон») в изометрии;
на фиг. 2 - устройство стягивания с тросовой системой АПАС («Аполлон») в проекции;
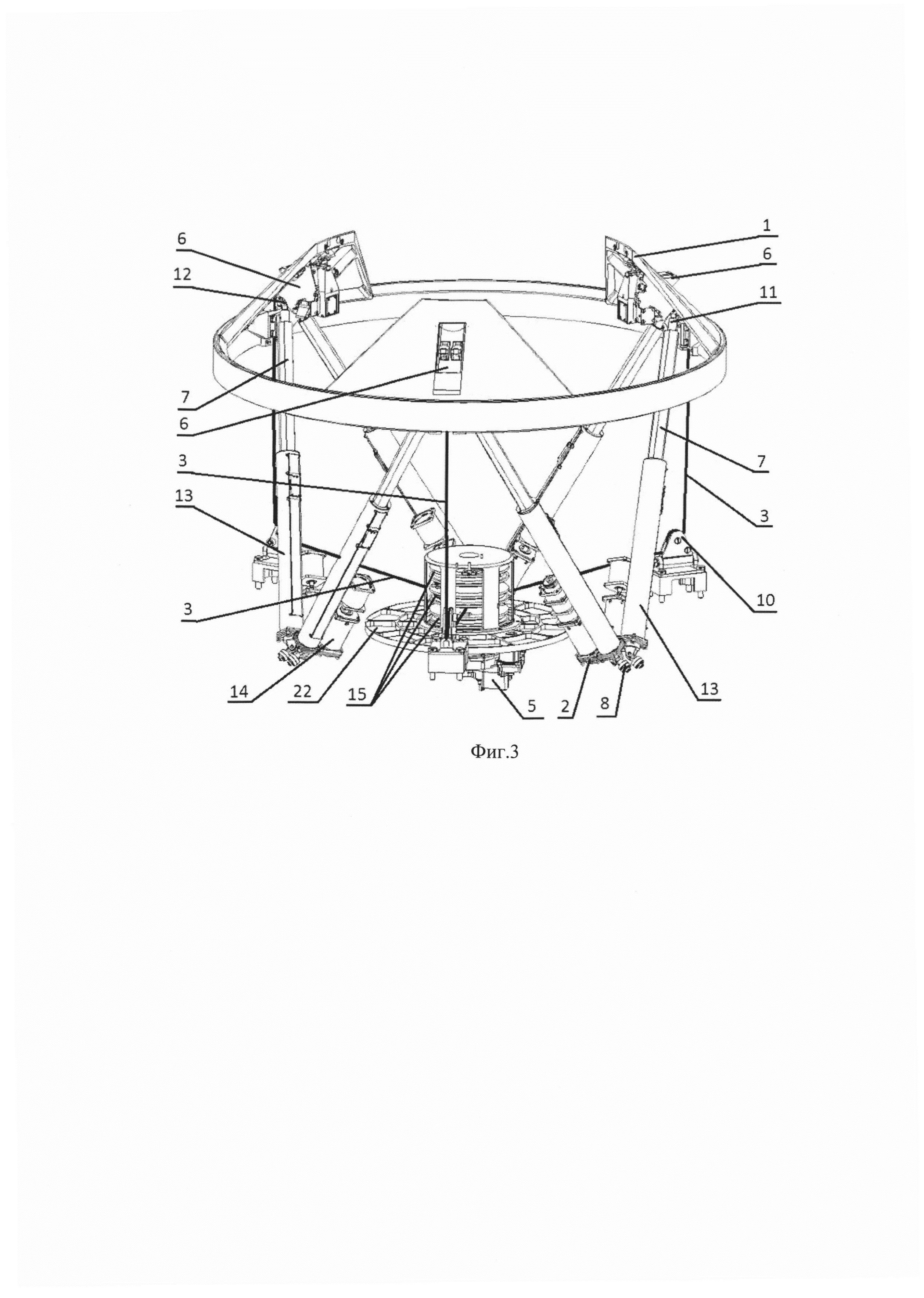
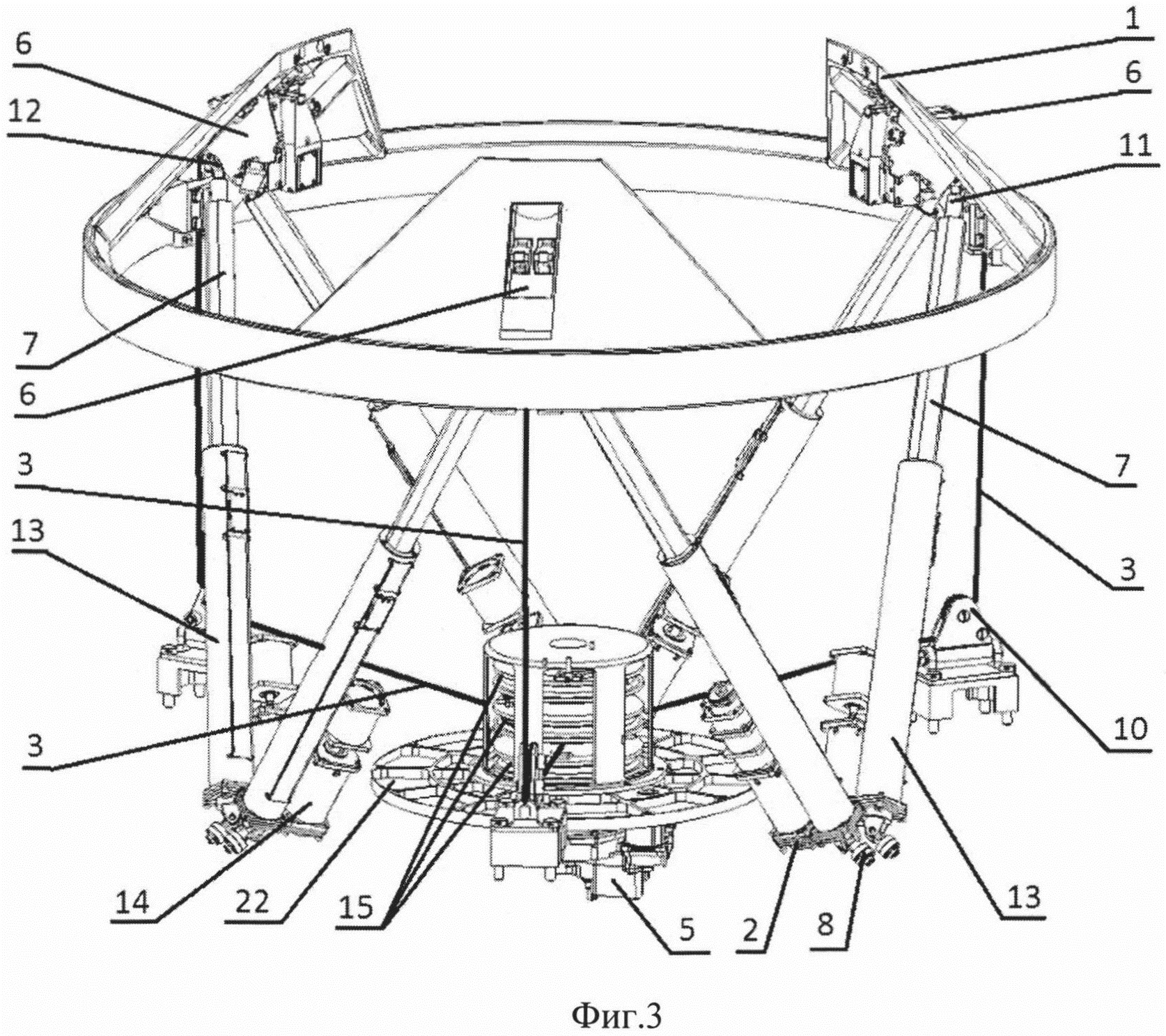
на фиг. 3-предлагаемое устройство стягивания стыковочных агрегатов космических аппаратов;
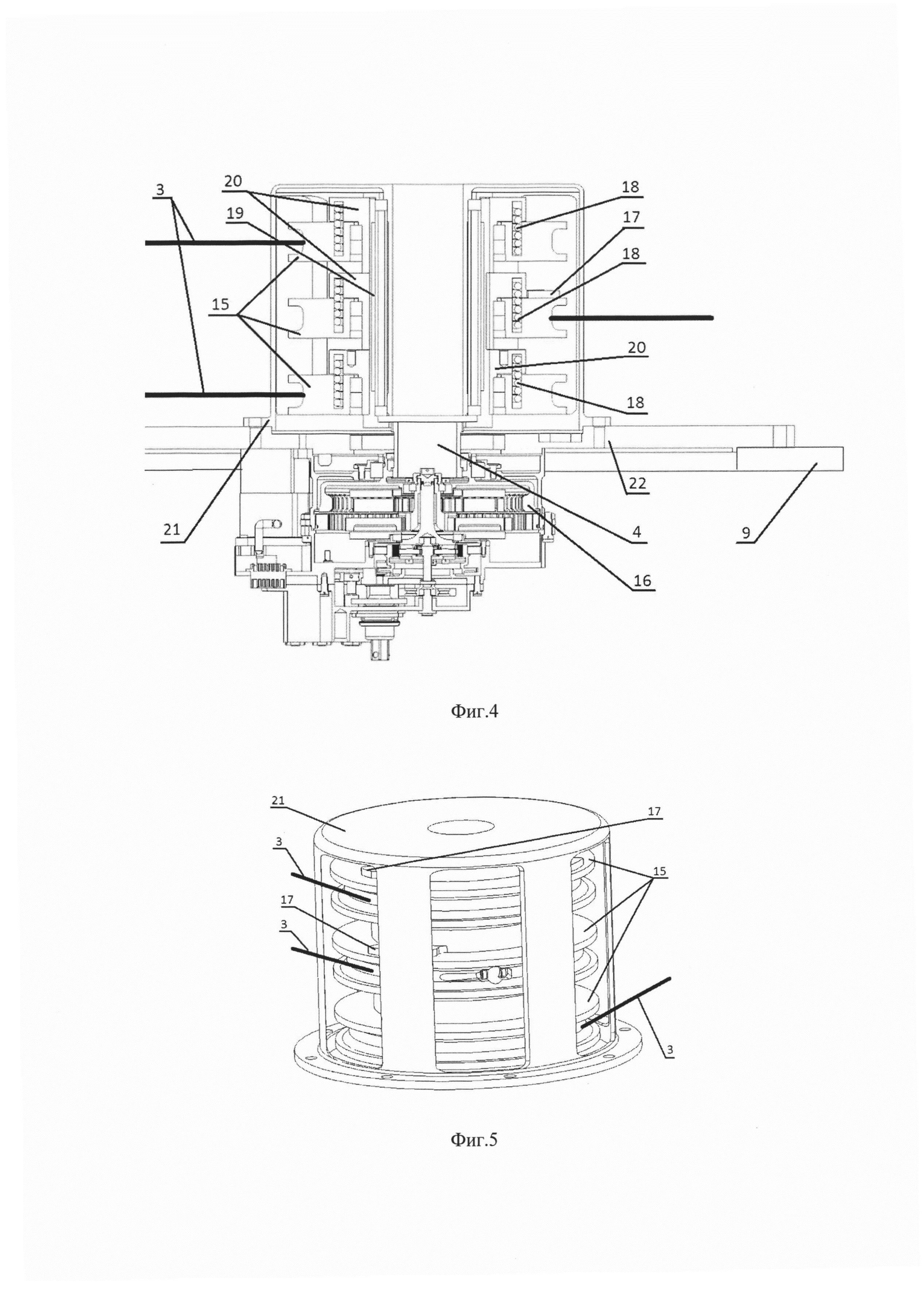
на фиг. 4 - элементы, которые задействованы в натяжении троса;
на фиг. 5 - размещение барабанов намотки троса.
На фиг. 1-5 приняты следующие обозначения:
1 - стыковочное кольцо с направляющими для сцепки; 2 - штанга с ШВП; 3 - трос; 4 - шлицевая втулка, 5 - привод; 6 - механизм защелок; 7 - штоки; 8 - шарниры первой группы; 9 - корпус стыковочного агрегата; 10 - направляющий ролик; 11 - тарельчатая пружина; 12 - шарниры второй группы; 13 - корпус штанги; 14 - пружина штанг с ШВП, 15 - барабан намотки троса; 16 - силовая ступень редуктора привода; 17 - набор кулачков; 18 - элемент выборки слабины троса, например, пружина кручения; 19 - входной вал передачи момента от редуктора; 20 - выходной вал передачи момента от редуктора; 21 - единый корпус; 22 - неподвижное основание; при этом барабан намотки троса 15, набор кулачков 17; пружина кручения 18; входной вал передачи момента от редуктора 19 и выходной вал передачи момента от редуктора 20 заключены в единый корпус 21.
Устройство стягивания содержит механизмы защелок 6, установленные на направляющих выступах стыковочного кольца с направляющими для сцепки 1; штанги с ШВП 2, установленные с возможностью движения независимо друг от друга, в которых штоки 7, одним своим концом связанные шарнирами второй группы 12 со стыковочным кольцом с направляющими для сцепки 1, установлены с возможностью поступательного перемещения вдоль продольных осей корпусов штанг с ШВП 2, основания которых связаны шарнирами первой группы 8 с корпусом стыковочного агрегата 9. Привод 5 расположен на корпусе стыковочного агрегата 9 в центре неподвижного основания 22, при этом каждый трос 3 через направляющий ролик 10 и тарельчатую пружину 11 соединен с корпусом механизма защелок 6 на одном из направляющих выступов стыковочного кольца для сцепки 1. Барабаны намотки троса 15, количество которых соответствует количеству тросов 3, установленные на корпусе стыковочного агрегата 9 на входном валу передачи момента от редуктора 19, при этом силовая ступень редуктора привода 16 размещена внутри привода 5, предназначенного для вращения барабана намотки троса 15. Тросы 3 выполнены равной длины. Пружина кручения 18 размещена между барабаном намотки троса 15 и выходным валом передачи момента от редуктора 20, для устранения провисания троса 3 при просадке стыковочного кольца с направляющими для сцепки 1.
Перед стыковкой СтМ (фиг. 3) переводится в выдвинутое положение. Для этого блок управления подает команду на включение привода 5 в направлении увеличения свободной длины тросов 3, приводя в движение все элементы, а именно: барабан намотки троса 15, набор кулачков 17, пружину кручения 18, входной вал передачи момента от редуктора 19, выходной вал передачи момента от редуктора 20, заключенные в единый корпус 21, задействованные в натяжении троса 3, через силовую ступень редуктора привода 16 и шлицевую втулку 4. В результате под действием сжатых пружин 14 штанг с ШВП 2 все штоки 7 выдвигаются из корпусов штанг 13 и стыковочное кольцо с направляющими для сцепки 1 движется вперед вдоль продольной оси СтМ, в котором штанги с ШВП 2, их пружины 14 и тросы 3 имеют максимальную длину, а стыковочное кольцо для сцепки с направляющими 1 максимально удалено от стыковочной плоскости корпуса стыковочного агрегата 9.
В момент стыковки, при контактном взаимодействии стыковочного кольца с направляющими для сцепки 1 с кольцом ответного пассивного агрегата КА смещается относительно своего полностью выдвинутого положения, при этом штоки 7 входят в корпуса штанг 13 и пружины 14 временно сжимаются, из-за чего возникает неравномерное изменение натяжения тросов 3, удерживающих стыковочное кольцо с направляющими для сцепки 1.
В этот момент срабатывает устройство стягивания стыковочных агрегатов КА содержащее стыковочное кольцо с направляющими для сцепки 1 и установленными на них механизмами защелок 6, приводится в движение один или несколько барабанов намотки троса 15. Привод 5 в этот момент находится в состоянии покоя.
Необходимое усилие натяжения троса 3 создается элементами, а именно барабаном намотки троса 15, набором кулачков 17; пружиной кручения 18, входным валом передачи момента от редуктора 19; выходным валом передачи момента от редуктора 20, заключенным в единый корпус 21, задействованными в натяжении троса 3 (фиг. 4).
В момент просадки стыковочного кольца с направляющими для сцепки 1 слабина троса 3 выбирается за счет вращения барабана намотки троса 15, который приводится в движение энергией запасенной в пружине кручения 18, находящийся в корпусе 21. Это движение не передается на выходной вал передачи момента от редуктора 20 и как следствие на входной вал передачи момента от редуктора 19 из-за набора кулачков 17, которые в момент сцепки агрегатов убирают зацепление между ними.
После завершения демпфирования энергии сближения активного КА по команде блока управления привод 5 начинает вращать барабаны намотки троса 15 в направлении уменьшения длины свободных тросов 3 и переводит СтМ в полностью втянутое положение.
Барабаны намотки троса 15 в начальный момент включения привода 5 имеют два режима: состояние покоя, если была просадка соответствующего троса 3 и разрушено зацепление между барабаном намотки троса 15 и выходным валом передачи момента от редуктора 20, тогда происходит взведение пружины кручения 18 до образования механической связи через набор кулачков 17; вращение, если не было просадки троса 3. При взведении всех пружин кручения 18, все элементы, задействованные в намотке троса 3 начинают работать в одинаковом режиме и стыковочное кольцо с направляющими для сцепки 1 движется вдоль продольной оси СтМ до полностью втянутого положения.
Внесенные изменения в конструкцию приводят к упрощению настройки положения стыковочного кольца с направляющими для сцепки.
Устройство стягивания стыковочных агрегатов космических аппаратов, содержащее механизмы защелок, установленные на выступах стыковочного кольца с направляющими для сцепки, штанги, установленные с возможностью движения независимо друг от друга, в которых штоки, одним своим концом связанные шарнирами первой группы со стыковочным кольцом, установлены с возможностью поступательного перемещения вдоль продольных осей корпусов штанг, основания которых связаны шарнирами второй группы с корпусом стыковочного агрегата, а также привод, расположенный на корпусе стыковочного агрегата, при этом каждый трос через направляющий ролик и элемент устранения разности длин тросов соединен с механизмом защелок на одном из выступов стыковочного кольца, отличающееся тем, что в него введены барабаны намотки троса в соответствии с количеством тросов, установленные на корпусе стыковочного агрегата в центре неподвижного основания и соединенные между собой механизмом передачи крутящего момента, выполненным в виде входного вала передачи момента от редуктора, на котором установлены выходные валы передачи момента от редуктора, количество которых соответствует количеству тросов, а также шлицевой втулки, установленной между силовой ступенью редуктора привода и входным валом передачи момента от редуктора, при этом силовая ступень редуктора привода размещена внутри привода, размещенного в центре неподвижного основания, каждый барабан намотки троса, входной вал передачи момента от редуктора, выходные валы передачи момента от редуктора и привод размещены на главной оси корпуса стыковочного агрегата, а тросы выполнены равной длины, причем дополнительно введен элемент выборки слабины троса, размещенный между барабаном намотки троса и выходным валом редуктора привода.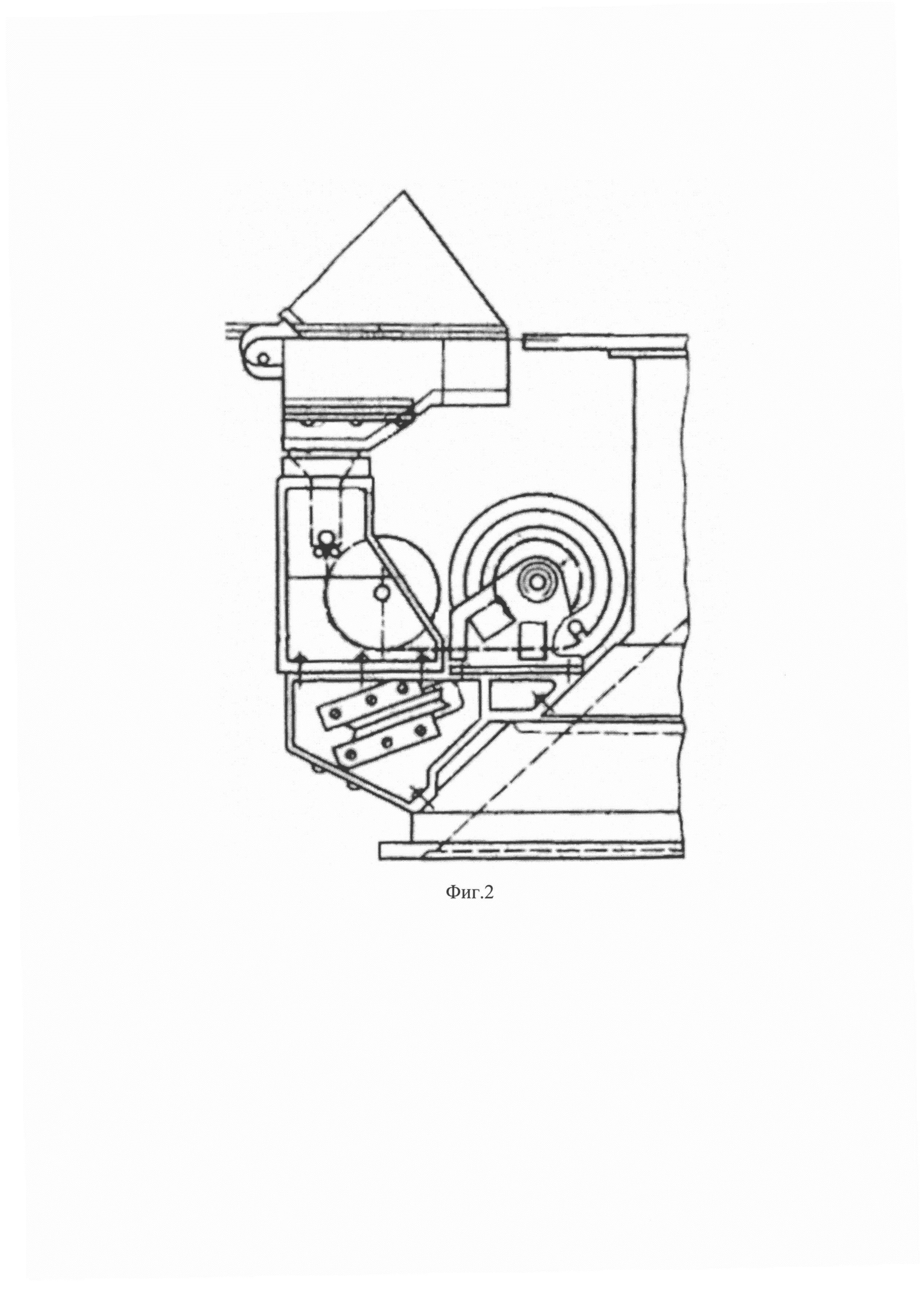
Способ контроля готовности космонавта к выполнению полетных операций
Способ контроля производительности солнечной батареи космического аппарата с инерционными исполнительными органами
Способ определения производительности установленной на космическом аппарате солнечной батареи с положительной выходной мощностью тыльной поверхности
Способ управления снабженным солнечными батареями космическим аппаратом
Способ управления снабженным солнечными батареями космическим аппаратом
Электронасосный агрегат
Способ кодирования и декодирования блокового кода
Способ контроля лесного пожара с космического аппарата
Гидроразъем
Способ контроля лесного пожара с космического аппарата
Шариковый замок
Периферийный стыковочный механизм
Планетарный редуктор

