Результат интеллектуальной деятельности: Способ компенсации помех и комплекс для его осуществления
Вид РИД
Изобретение
Заявляемые технические решения относятся к области радиолокации и могут быть использованы в радиолокационных станциях (РЛС) для защиты от импульсных, в том числе, ответных помех.
Большие проблемы работе РЛС создают преднамеренные активные, в том числе, импульсные помехи [Справочник. Радиотехнические системы. Основы построения и теория. Под редакцией Я.Д. Ширмана гл. 6.4.1, с. 79], воздействующие на РЛС по главному лучу и боковым лепесткам диаграммы направленности антенны (ДНА) [Защита от радиопомех, под ред. М.В. Максимова, М. Сов. Радио, 1976 г, с. 60]. Импульсные помехи энергетически более выгодны для постановщика, так как при небольшой средней мощности импульсная мощность помехи может значительно превышать уровень непрерывной помехи. В результате действия импульсных помех происходят ложные обнаружения целей. При достаточно большой мощности помехи она обнаруживается не только в главном луче, но и при приеме с бокового направления боковыми лепестками диаграммы направленности антенны (ДНА), в результате чего при частоте следования импульсов, значительно превышающей частоту зондирования, создается большое число ложных сигналов (отметок) хаотических или неподвижных, в простейшем случае, либо движущихся с установленной постановщиком помехи скоростью, в случае синхронной ответной помехи. Во всех случаях импульсы помехи воспринимаются как отраженные от целей, поэтому по ним выполняют захват и завязку трассы [С.З. Кузьмин - Основы проектирования систем цифровой обработки радиолокационной информации стр. 109] с последующим ее сбросом, в случае несинхронной помехи, или ведением ложной трассы, в случае синхронной помехи с изменяющейся задержкой. В результате ответная помеха приводит к перегрузке устройств РЛС.
Известен способ [патент RU №2538195] распознавания сигналов источника импульсного радиоизлучения (ответной помехи), основанный на приеме прямого излучения источника и его отражения от объекта, измерении по положению максимума взаимной корреляционной функции величины временного сдвига этих радиоизлучений и распознавании сигналы постановщика ответной помехи (ПОП) по принятому критерию. В качестве отражающего объекта используют активный или пассивный ретранслятор, принимают импульсные последовательности - переизлученную ретранслятором последовательность и принятую с осматриваемого направления, устраняют временной сдвиг последовательностей, при необходимости определяют значение корреляции импульсов последовательностей, импульсы, принятые с осматриваемого направления, соответствующие установленному критерию определения помехи, считают помехой.
В качестве критерия помехи используют совпадения во времени импульсов последовательностей или используют уровень корреляции импульсов последовательностей превышающих средний уровень
Суть работы способа состоит в том, что однопозиционная РЛС, содержащая активный и пассивный каналы, излучает импульс, ПОП в ответ на принятый импульс РЛС излучает ответную помеху в виде последовательности импульсов, идентичных по структуре импульсу РЛС. При этом активный канал РЛС, находящийся в режиме приема, принимает отраженные от цели импульсы и прямую последовательность ответных помех. Ретранслятор переизлучает ответную помеху, которую принимают пассивным каналом. Уровень сигнала, отраженного от цели и переизлученного ретранслятором, много меньше уровня переизлученной ретранслятором помехи и повлиять на уровень корреляции он не может.
Если вычисление корреляционных функций по каждому импульсу последовательностей производить после исключения сдвига во времени прямой последовательности на величину разности хода Δt импульсов от ПОП и через ретранслятор, то коррелированными остаются только импульсы помехи, так как время разности хода для импульсов помехи и цели будет различно. Кроме того, уровень сигнала от цели, переизлученный ретранслятором и принятый дополнительным каналом, очень мал.
Недостаток известного способа состоит в том, что при наложении более мощного импульса помехи, принимаемого с бокового направления на отраженный сигнал от цели, принимаемый главным лучом, отраженный сигнал будет принят за помеху. Чтобы выделить отраженный сигнал из смеси с помехой необходимо ее компенсировать.
Известен наиболее близкий к предлагаемому способ компенсации непрерывных помех [Справочник. Радиотехнические системы. Основы построения и теория. Под редакцией Я.Д. Ширмана, гл. 25.4.2, с. 436], основанный на приеме сигналов двумя приемными каналами - основным и дополнительным, автоматической настройке параметров автокомпенсатора, обеспечивающих вычитание сигналов, принимаемых с направления на источник помехи. Это достигается тем, что в процессе управления в автокомпенсаторе происходит выравнивание амплитуды и фазы только коррелированной части сигналов основного и дополнительного каналов с последующим их вычитанием. Исключение возможности подавления отраженного от цели сигнала при этом достигается за счет отличительного признака сигнала и помехи, заключающегося в различной протяженности во времени непрерывной помехи и сравнительно коротких отраженных от цели сигналов. Благодаря этой разнице подстройка параметров автокомпенсатора на помеху происходит за время, большее чем длительность отраженного от цели сигнала. Поэтому автокомпенсатор не может компенсировать отраженный от цели сигнал, но при этом автокомпенсатор не может компенсировать и импульсные помехи.
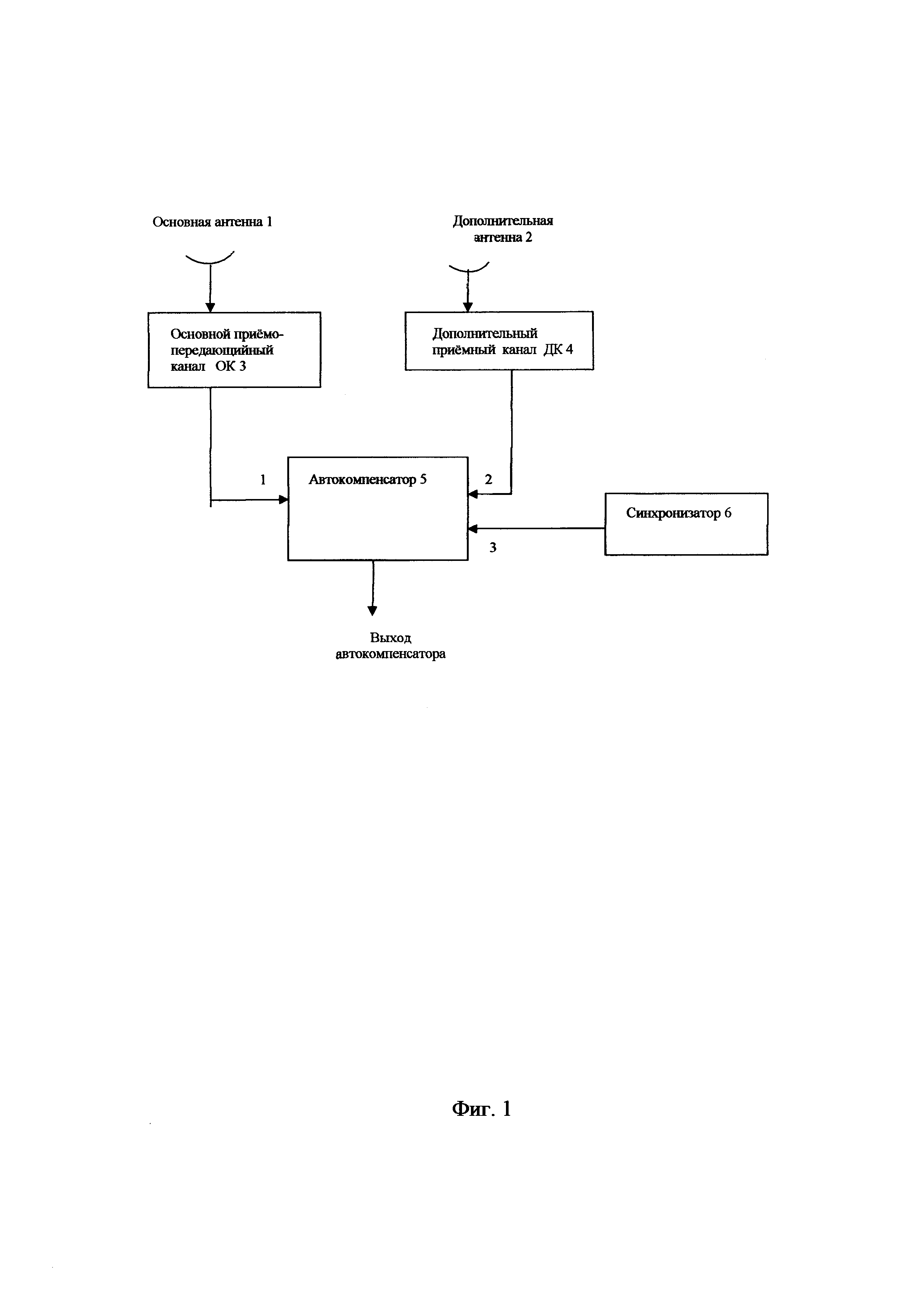
Известна наиболее близкая к РЛС, входящей в заявляемый комплекс [там же гл. 25.4.3, с. 436] (фиг. 1), содержащая две антенны, основную 1 и дополнительную 2, два канала - основной приемо-передающий (ОК) 3, и дополнительный приемный канал (ДК) 4, автокомпенсатор 5 и синхронизатор 6, вход-выход основной антенны 1 соединен с входом ОК 3, выход дополнительной антенны 2 соединен с входом ДК 4, выходы ОК 3 и ДК 4 соединены с первым и вторым входами автокомпенсатора 5 соответственно, выход синхронизатора 6 соединен с третьим входом автокомпенсатора.
РЛС, осуществляющая известный способ, работает следующим образом. Непрерывная помеха, принятая основной антенной 1 и дополнительной антенной 2, поступает через основной канал 3 и дополнительный канал 4 на первый и второй входы автокомпенсатора 5 соответственно. В автокомпенсаторе происходит автоматическое выравнивание амплитуды и фазы помехи, принятой основным и дополнительным каналами, и их вычитание. При этом на выходе автокомпенсатора 5 происходит компенсация помехи. Синхронизатор 6 задает последовательность периодов повторения зондирующего импульса.
Постоянную времени срабатывания автокомпенсатора выбирают много большей, чем длительность отраженного зондирующего импульса, для того, чтобы автокомпенсатор за время действия отраженного сигнала не успевал его скомпенсировать. Это исключает возможность подавления сигнала от цели, но это и не позволяет компенсировать импульсную помеху, поскольку ее протяженность во времени совпадает с протяженностью сигнала, отраженного от цели. Поэтому автокомпенсаторы не применяют для компенсации импульсных помех.
Недостаток наиболее близкого известного способа состоит в том, что способ не обеспечивает компенсации импульсных помех.
Таким образом, решаемой технической проблемой (техническим результатом) является компенсация импульсной помехи, при сохранении условий приема сигналов, отраженных от цели.
Техническая проблема компенсации импульсной помехи решается на основе распознавания импульсов помехи по признакам, отличающим импульсы помехи от сигналов, отраженных от целей, и настройке автокомпенсатора только на распознанные импульсы помехи за счет использования известного способа распознавания ответной помехи [патент RU №2538195].
Поставленная проблема (технический результат) решается тем, что в способе компенсации помех радиолокационной станции, основанном на приеме сигналов основным и дополнительным каналами, на настройке параметров автокомпенсатора, обеспечивающих вычитание сигналов, принимаемых с направления на источник помех, согласно изобретению прием сигналов дополнительным каналом осуществляют через ретранслятор, переотражающий падающие на него сигналы помехи постановщика помех, а эти сигналы помехи, принятые основным каналом, задерживают до появления сигнала в дополнительном канале и компенсируют их на выходе автокомпенсатора..
Поставленная проблема (технический результат) решается комплексом, включающем в себя радиолокационную станцию для компенсации импульсных помех и ретранслятор импульсных помех.
Поставленная проблема (технический результат) решается тем, что в РЛС для комплекса, предназначенного для компенсации импульсных помех, содержащую основную антенну, дополнительную направленную антенну, основной приемо-передающий и дополнительный приемный каналы, автокомпенсатор, синхронизатор, вход-выход основной антенны соединены с входом основного канала, выход дополнительной антенны соединен с входом дополнительного канала, согласно изобретению, автокомпенсатор выполнен в цифровом виде, введены пороговое устройство (ПУ), два аналого-цифровых преобразователей (АЦП), оперативное запоминающее устройство (ОЗУ), устройство стробирования, выход основного канала соединен с входом первого АЦП, выход которого соединен с первым входом ОЗУ, выход дополнительного канала соединен с входом ПУ, первый выход ПУ соединен со входом устройства стробирования и вторым входом ОЗУ, второй выход ПУ соединен с входом второго АЦП, выход второго АЦП соединен со вторым входом цифрового автокомпенсатора, первый вход цифрового автокомпенсатора соединен с выходом ОЗУ, выход устройства стробирования соединен с четвертым входом цифрового автокомпенсатора, выход синхронизатора соединен с третьим входом ОЗУ и третьими входом цифрового автокомпенсатора.
Суть работы способа заключается в следующем (фиг. 2).
Постановщик ответной помехи (ПОП) принимает зондирующий сигнал РЛС и излучает его усиленную копию. Усиленный и излученный ПОП сигнал принимают основной антенной РЛС (боковыми лепестками ее ДНА), а так же переизлучают ретранслятором в направлении на РЛС, которая принимает этот сигнал направленной на ретранслятор дополнительной антенной. Сигналы, принятые основным каналом, поступают на первый АЦП, а с него поступают на первый вход ОЗУ. Сигнал, принятый дополнительным каналом, поступает на вход ПУ, превысившие его порог сигналы с его первого выхода поступают на вход устройства стробирования и на второй вход ОЗУ, а со второго выхода поступают на вход второго АЦП, с выхода которого поступают на второй вход цифрового автокомпенсатора. По этому сигналу с выхода ПУ включают считывание информации, запомненной в ОЗУ и включают устройство стробирования, формирующее строб, который включает автокомпенсатор, выполненный в цифре, на время действия импульса помехи. Таким образом, начало работы цифрового автокомпенсатора в импульсном режиме привязано к моменту появления первого импульса ответной помехи в дополнительном канале и при этом реализуют критерий признака ответной помехи в виде совпадения импульсных последовательностей после компенсации временной задержки сигнала от ретранслятора с помощью ОЗУ. Со второго выхода ПУ сигнал поступает на вход второго АЦП, а с его выхода поступает на второй вход цифрового автокомпенсатора, в котором под стробами происходит в импульсном режиме последовательное настраивание параметров автокомпенсатора под ответную помеху до полного ее подавления. Синхронизатор каждый новый период сбрасывает запись в ОЗУ и перезапускает цифровой автокомпенсатор. Благодаря этому принимаемые сигналы ответной помехи компенсируются, а отраженные сигналы, принятые главным лучом основной антенны, не компенсируются, так как из-за углового разноса цели и постановщика помехи амплитудно-фазовые соотношения отраженных сигналов не совпадают с таковыми импульсов помехи, на которые настроен автокомпенсатор. В цифровом автокомпенсаторе в цифровом виде реализуется алгоритм работы аналогового автокомпенсатора. При отсутствии импульса помехи сигнал проходит через ОЗУ напрямую без задержки.
Таким образом, цифровой автокомпенсатор за счет настройки параметров во время стробирования позволяет компенсировать только импульсную помеху, принимаемую боковыми лепестками ДНА с направления на постановщик помехи и сохраняют условия приема сигналов, отраженных от цели.
Изобретения иллюстрируется чертежами:
фиг. 1 схема РЛС для осуществления способа-прототипа;
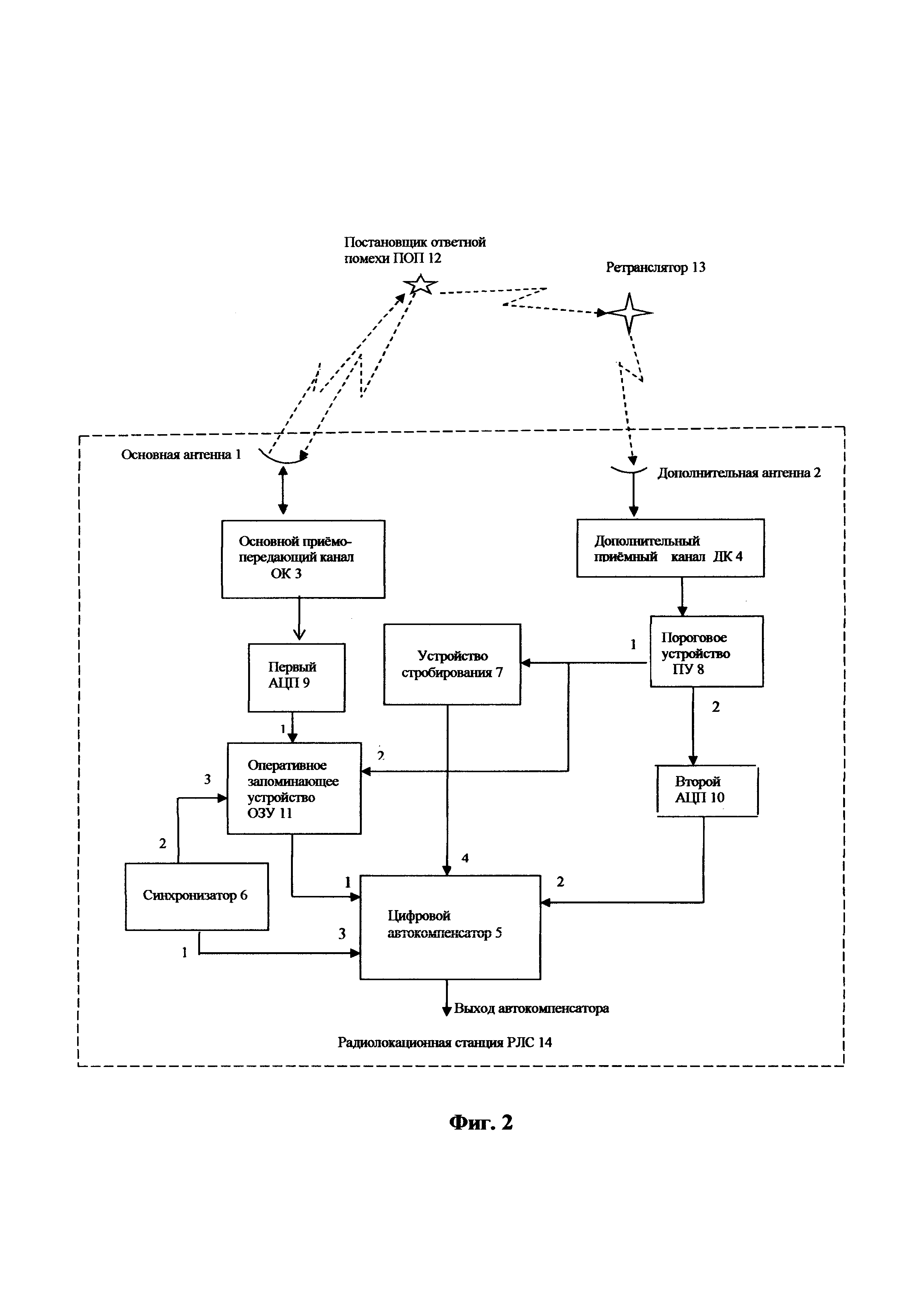
фиг. 2 - схема комплекса и РЛС для осуществления заявленного способа.
Заявленный комплекс для осуществления способа компенсации помехи (фиг. 2), включающий ретранслятор 13 и РЛС 14, содержащую основную антенну 1, дополнительную направленную антенну 2, основной приемо-передающий 3 и дополнительный 4 приемный каналы, цифровой автокомпенсатор 5, синхронизатор 6, пороговое устройство 8, два аналого-цифровых преобразователей АЦП 9 и АЦП 10, оперативное запоминающее устройство ОЗУ 11, устройство стробирования 7, ретранслятор размещают в зоне прямой видимости РЛС 14, вход-выход антенн 1 и выход антенны 2 соединены с входами соответствующих каналов 3 и 4, выход основного канала 2 соединен с входом первого АЦП 9, выход которого соединен с первым входом ОЗУ 11, выход дополнительного канала 4 соединен с входом ПУ 8, первый выход ПУ 8 соединен с входом устройства стробирования 7 и вторым входом ОЗУ 11, второй выход ПУ 8 соединен с входом второго АЦП 10, выход второго АЦП 10 соединен со вторым входом цифрового автокомпенсатора 5, первый вход цифрового автокомпенсатора 5 соединен с выходом ОЗУ 11, выход устройства стробирования 7 соединен с четвертым входом цифрового автокомпенсатора 5, первый выход синхронизатора 6 соединен с третьими входом цифрового автокомпенсатора 5, а второй выход соединен с третьим входом ОЗУ11.
Рассмотрим более подробно осуществимость способа (фиг. 2) на конкретном примере.
Постановщик ответной помехи ПОП 12 принимает зондирующий сигнал РЛС 14 и излучает его усиленную копию. Усиленный и излученный ПОП 12 сигнал принимают основной антенной 1 РЛС 14 (боковыми лепестками ее диаграммы направленности), а так же принимают и переизлучают ретранслятором 13 в направлении на РЛС 14, которая принимает этот сигнал направленной на ретранслятор дополнительной антенной 2. Сигналы, принятые основным каналом 3, поступают на первый АЦП 9, а с его выхода поступают на первый вход ОЗУ 11, в котором информация записывается и задерживается ее считывание до появления сигнала в дополнительном канале на выходе ПУ 8. Сигнал, принятый дополнительным каналом, поступает на вход ПУ 8, превысившие его порог сигналы с его первого выхода поступают на вход устройства стробирования 7 и на второй вход ОЗУ. По этому сигналу включают считывание информации, задержанной в ОЗУ 11 и включают устройство стробирования 7, формирующее строб, который включает цифровой автокомпенсатор 5 на время действия импульса помехи. Таким образом, начало работы цифрового автокомпенсатора 5 привязано к моменту появления первого импульса ответной помехи в дополнительном канале 4 и реализуется критерий признака ответной помехи в виде совпадения импульсных последовательностей после компенсации задержки сигнала от ретранслятора с помощью ОЗУ 11. Со второго выхода ПУ 8 сигнал поступает на вход второго АЦП 10, а с его выхода поступает на второй вход цифрового автокомпенсатора 5, в котором под стробами происходит в импульсном режиме последовательное подстраивание параметров автокомпенсатора под ответную помеху до ее подавления. Благодаря этому принимаемые сигналы ответной помехи компенсируются, а отраженные от цели сигналы, принятые главным лучом основной антенны, не компенсируются, так как из-за углового разноса цели и постановщика помехи амплитудно-фазовые соотношения отраженных сигналов не совпадают с таковыми импульсов помехи, на которые настроен цифровой автокомпенсатор 5. Синхронизатор 6 каждый новый период сбрасывает запись в ОЗУ11 и перезапускает цифровой автокомпенсатор 5. В цифровом автокомпенсаторе 5 в цифровом виде реализуется известный алгоритм работы аналогово автокомпенсатора. При отсутствии импульса помехи сигнал проходит через ОЗУ напрямую без задержки на первый вход цифрового автокомпенсатора 5.
Таким образом решается проблема компенсации автокомпенсатором ответных помех, принятых с направления на ПОП, при сохранении условий приема сигналов, отраженных от цели.
Причинно-следственная связь между поставленной проблемой, состоящей в компенсации импульсной помехи и сохранении условий приема сигналов, отраженных от цели, и признаками изобретения состоит в том, что в формулу изобретения включен признак «прием сигналов дополнительным каналом осуществляют через ретранслятор, переотражающий падающие на него сигналы помехи постановщика помех, эти сигналы помехи, принятые основным каналом, задерживают до появления сигнала в дополнительном канале и компенсируют их на выходе автокомпенсатора», благодаря чему обеспечивается подавление помехи и сохраняются условия приема отраженных от цели сигналов.
Способ определения угловых координат цели (варианты)
Способ стабилизации вероятности ложной тревоги
Способ стабилизации вероятности ложной тревоги и устройство для его реализации
Способ стабилизации вероятности ложной тревоги (варианты) и устройство для его реализации (варианты)
Способ радиолокационного обзора пространства (варианты)
Способ радиолокационного обнаружения целей и комплекс для его реализации
Способ определения координат целей и комплекс для его реализации
Способ определения координат источника радиоизлучения-постановщика ответной помехи и способ определения координат целей, облучаемых постановщиком ответной помехи
Способ распознавания трассы цели и ложной трассы, формируемой синхронной ответной помехой (варианты)
Способ определения координат целей и комплекс для его реализации

