Результат интеллектуальной деятельности: СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ЦЕЛЕЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ
Вид РИД
Изобретение
Изобретения относятся к области радиолокации и могут быть использованы при обнаружении отражающих радиоизлучение целей, находящихся на больших дальностях, скрытно и с минимальными энергетическими затратами.
Из уровня техники известен способ определения координат целей, патент RU №2226701 МПК7 G01S 3/74, 13/87. Способ заключается в приеме прямого излучения (сигнала) источника излучения и приеме отраженных целями сигналов этого источника с помощью однопозиционной РАС, определении координат одной из целей с помощью активной радиолокационной станции (РАС), определении угловых координат источника излучений и определении временных задержек между прямым и отраженным этой целью сигналами источника излучений, определении временных задержек сигналов излучений от других целей относительно этой цели и вычислении координат этих целей.
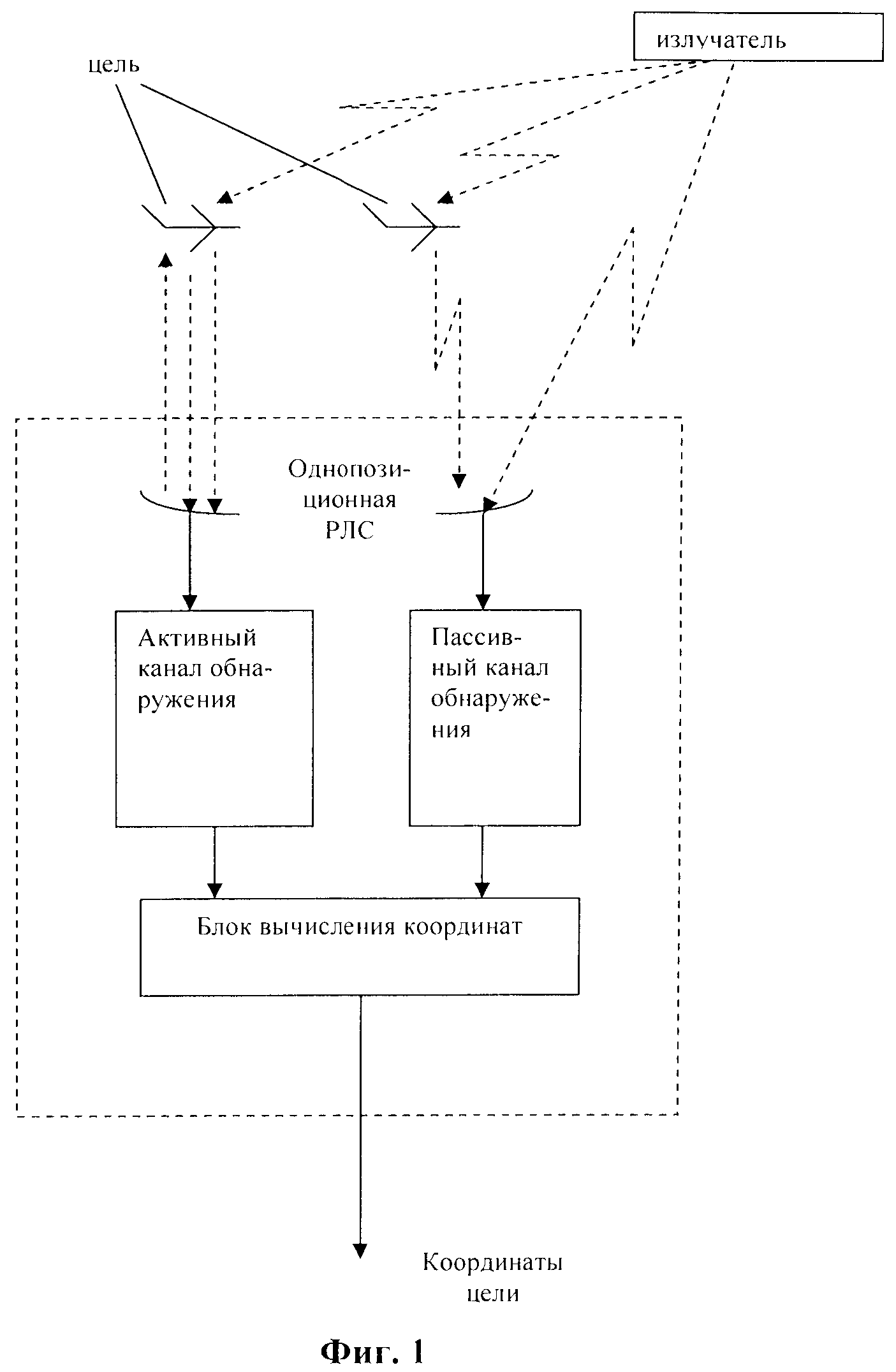
Известна радиолокационная станция (РАС), патент RU №2226701 МПК7 G01S 3/74, 13/87, реализующая известный способ (фиг.1), которая содержит активный канал обнаружения, пассивный канал обнаружения и блок вычисления координат. Активный и пассивные каналы обнаружения позиционно совмещены, а их выходы подключены к соответствующим входам блока вычисления координат. Сигналы, принятые активным каналом, и сигналы, принятые пассивным каналом, поступают на соответствующие входы блока вычисления координат.
Недостаток известного способа и известной РАС состоит в необходимости применения активной РАС для определения дальности.
Известен наиболее близкий к предлагаемому способ радиолокационного обнаружения целей патент RU №2233456 МПК7 G01S 13/00. Способ радиолокационного обнаружения целей, основанный на приеме излучений из контролируемых направлений, измерении параметров излучений и принятии решения об обнаружении цели, определении угловых координат целей с помощью пассивной радиолокационной станции (ПРЛС), на выборе источников излучений и на получении ПРЛС через ретранслятор, расположенный в зоне прямой видимости источника излучений и ПРЛС, информации о сигнале источника излучений, измерении корреляции между этим сигналом и сигналами, отраженными от целей, и принятии решения об обнаружении цели, если измеряемая величина корреляции превышает пороговый уровень.
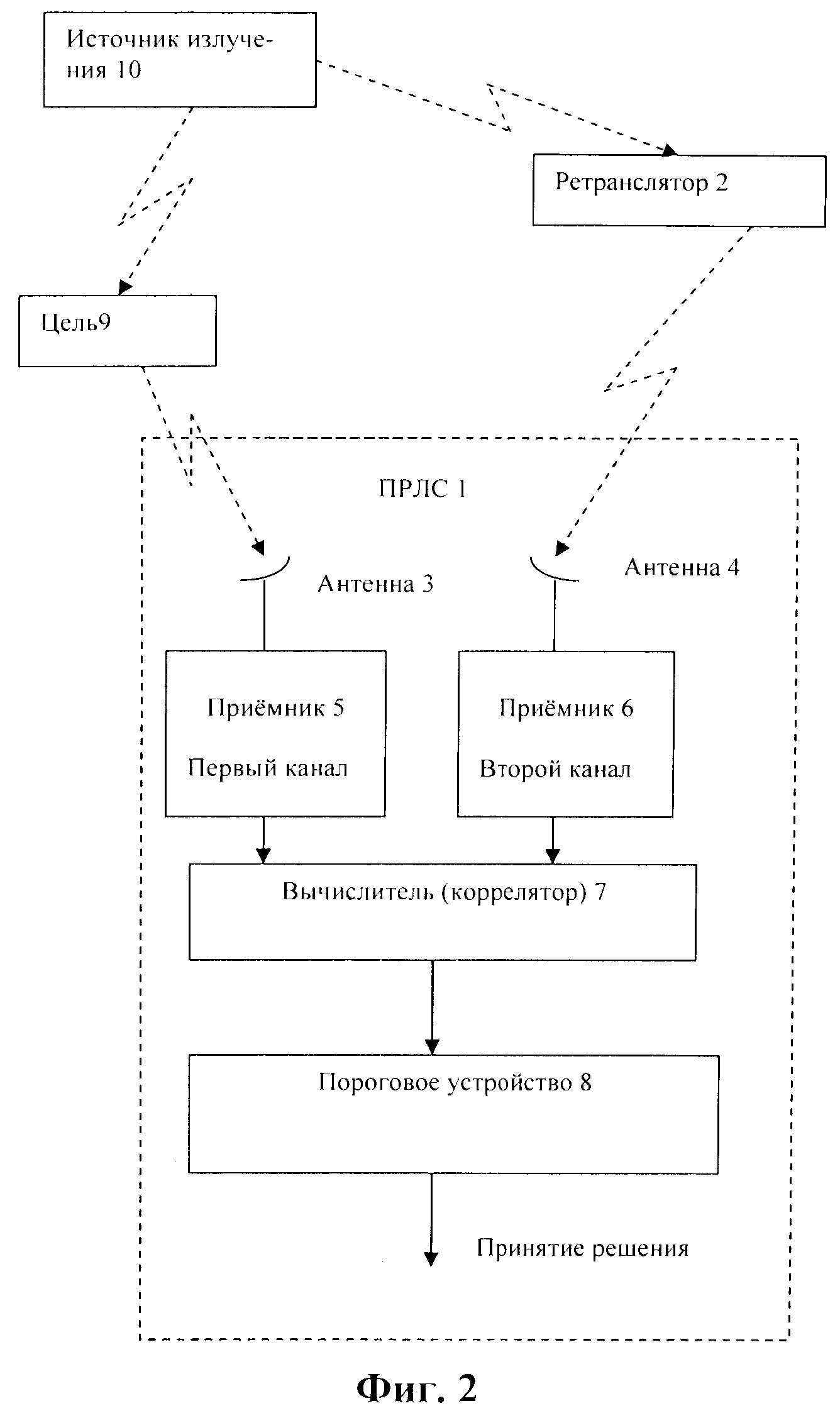
Из уровня техники известен наиболее близкий комплекс, патент RU №2233456 МПК7 G01S 13/00, (фиг.2) содержащий пассивную радиолокационную станцию (ПРЛС) 1 и ретранслятор 2, ПРЛС 1 содержит антенны 3 и 4, приемники 5 первого и 6 второго каналов, вычислитель (коррелятор) 7 и пороговое устройство 8. Выходы антенн 3 и 4 подключены к соответствующим входам приемников 5 и 6 первого и второго каналов ПРЛС 1, а их выходы подключены к первому и второму входам вычислителя 7, выход вычислителя 7 подключен к входу порогового устройства 8. Ретранслятор 2 удален от ПРЛС 1 в пределах прямой видимости.
Комплекс работает следующим образом: сигнал, отраженный от цели 9, облучаемой источником излучений 10, принимают антенной 3 и подают на вход приемника 5 первого канала ПРЛС 1, сигнал от источника излучений 10, переизлученный ретранслятором 2, расположенным в области прямой видимости источника излучений 10 и ПРЛС 1, принимают антенной 4 и подают на вход приемника 6 второго канала ПРЛС 1. Сигналы с выходов первого и второго каналов ПРЛС 1 подают на первый и второй входы вычислителя 7, определяют уровень сигнала корреляции и подают его на пороговое устройство 8. Превышение порога фиксируют как обнаружение цели 9 в контролируемом направлении.
Преимущество наиболее близких способа и комплекса состоит в том, что он обеспечивает скрытность его работы и возможность обнаружения удаленных целей, подсвечиваемых источниками излучений, т.е. без затрат энергии на облучение пространства.
Недостаток наиболее близких способа и комплекса состоит в том, что, обеспечив обнаружение цели и определение ее угловых координат в контролируемом направлении, он не позволяет измерять дальность до этой цели и поэтому может служить лишь как дополнение к активной радиолокационной станции.
Кроме того, из-за неизвестных параметров сигналов источников излучений невозможно обеспечить согласованный прием, что снижает дальность обнаружения цели, а из-за непредсказуемой работы случайного источника излучений использование пассивного режима обнаружения целей по отражениям от целей сигналов, излучаемых источником, может быть лишь эпизодическим.
Таким образом, решаемой задачей (техническим результатом) является измерение дальности до обнаруженной цели, находящейся на большом удалении при сохранении скрытности работы и без затрат энергии на излучение.
Задача решается на основе выбора источника излучения, расположенного вблизи удаленной зоны контроля, и на основе синхронизации процесса обработки сигналов источника, отраженных от цели, с работой источника.
Поставленная задача (технический результат) решается тем, что в способе радиолокационного обнаружения целей, основанном на приеме излучений из контролируемых направлений, измерении параметров излучений, принятии решения об обнаружении цели, определении угловых координат целей с помощью пассивной радиолокационной станции (ПРЛС), на выборе источников излучений и на получении ПРЛС через ретранслятор, расположенный в зоне прямой видимости источника излучений, информации о сигнале источника излучений, согласно изобретению в качестве источника излучений выбирают радиолокационную станцию, расположенную за горизонтом (ЗРЛС), с известными ее координатами и параметрами излучаемых сигналов и облучающую контролируемые направления, определяют моменты приема ПРЛС отраженных целями сигналов ЗРЛС, определяют с помощью ретранслятора момент излучения сигнала ЗРЛС и вычисляют дальности до целей.
Поставленная задача (технический результат) решается также тем, что в качестве ретранслятора используют ретранслятор-вычислитель, на котором по известному расстоянию до ЗРЛС и в едином с ПРЛС времени вычисляют момент излучения сигнала ЗРЛС и передают на ПРЛС, на которой также в едином времени определяют моменты приема отраженных целями сигналов, излучаемых ЗРЛС.
Поставленная задача (технический результат) решается также тем, что в качестве ретранслятора используют отражатель с известными координатами, расположенный в прямой видимости ПРЛС.
Поставленная задача (технический результат) решается также тем, что применяют многолучевую ПРЛС.
Поставленная задача (технический результат) решается тем, что комплекс для радиолокационного обнаружения целей содержит двухканальную ПРЛС и удаленный от нее ретранслятор, ПРЛС содержит две антенны и приемники первого и второго каналов, выходы первой и второй антенн подключены к соответствующим входам приемников первого и второго каналов ПРЛС, согласно изобретению в состав ПРЛС введен измеритель дальности, его первый вход соединен с выходом приемника первого канала ПРЛС, а его второй вход соединен с выходом приемника второго канала ПРЛС.
Поставленная задача (технический результат) решается также тем, что ретранслятор содержит две антенны, приемник, передатчик, вычислитель и датчик единого времени, первая антенна подключена к входу приемника, а его выход подключен к первому входу вычислителя, второй вход вычислителя подключен к выходу датчика единого времени, выход вычислителя подключен к входу передатчика, выход передатчика подключен ко второй антенне.
Поставленная задача (технический результат) решается также тем, что ретранслятор выполнен в виде пассивного отражателя.
Поставленная задача (технический результат) решается также тем, что ПРЛС выполнена многолучевой.
Суть заявленных технических решений согласно (фиг.3) заключается в том, что в качестве излучателя выбирают стационарную радиолокационную станцию, расположенную за горизонтом (ЗРЛС). Ее координаты точно известны и заранее определены параметры сигнала. При известных параметрах сигнала ЗРЛС возможен согласованный прием, что позволяет повысить дальность обнаружения целей, облучаемых этой ЗРЛС. Для определения дальности до цели определяют момент излучения сигнала ЗРЛС с помощью ретранслятора с точно известными координатами. Отраженные целью сигналы и сигналы, переизлученные ретранслятором, принимает ПРЛС. При этом она определяет азимут ε, угол места β цели и определяет
момент излучения ЗРЛС. В заявленном способе предусматривается два варианта определения момента излучения сигнала ЗРЛС - с помощью пассивного и активного ретрансляторов (Военный энциклопедический словарь ракетных войск стратегического назначения, 1999, с.462, 463). Пассивный ретранслятор отражает сигналы ЗРЛС в направлении на ПРЛС, где по задержке времени приема этих сигналов и известных координатах ретранслятора и ЗРЛС вычисляют момент излучения сигнала ЗРЛС и расчетным путем определяют дальность до цели. Пассивный ретранслятор должен находиться в зоне прямой видимости и ПРЛС, и ЗРЛС.
Активный ретранслятор-вычислитель при известном его удалении от ЗРЛС сам определяет момент излучения сигнала ЗРЛС в едином времени, и передает эту информацию на ПРЛС, работающую также в едином времени. При этом нет необходимости располагать ретранслятор-вычислитель в зоне прямой видимости ПРЛС, так как информацию можно передавать на ПРЛС либо на частотах диапазонов УКВ, KB и ДВ, либо через спутник. Применение многолучевой ПРЛС со стационарным направлением лучей позволяет получать информацию о целях, находящихся в контролируемых направлениях, в непрерывном режиме при сканировании лучом ЗРЛС.
Изобретение иллюстрируется чертежами:
фиг.1 - РЛС, реализующая способ - аналог;
фиг.2 - комплекс, реализующий способ - прототип;
фиг.3 - схема предлагаемого способа;
фиг.4 - комплекс, реализующий предлагаемый способ.
Заявленный комплекс, реализующий заявленный способ радиолокационного обнаружения целей (фиг.4), содержит двухканальную ПРЛС 1 и удаленный от нее ретранслятор 2, ПРЛС 1 содержит антенны 3 и 4, приемники 5 и 6 первого и второго каналов, выходы антенн 3 и 4 подключены к соответствующим входам приемников 5 и 6 первого и второго каналов ПРЛС 1, в состав ПРЛС 1 введен измеритель дальности 11, первый вход измерителя дальности 11 соединен с выходом приемника 5 первого канала ПРЛС 1, а его второй вход соединен с выходом приемника 6 второго канала ПРЛС 1, в состав ретранслятора 2 введены антенны 12 и 13, приемник 14, передатчик 15, вычислитель 16 и датчик единого времени 17, выход антенны 12 подключен к входу приемника 14, первый вход вычислителя 16 подключен к выходу приемника 14, а второй вход подключен к выходу датчика времени 17, выход вычислителя 16 подключен к входу передатчика 15, а его выход подключен к антенне 13.
Рассмотрим более подробно реализуемость способа и комплекса (фиг.3, 4) на конкретном примере, когда в качестве ретранслятора используется ретранслятор - вычислитель, с помощью которого определяют момент излучения сигнала ЗРЛС.
Особенность комплекса состоит в том, что точно известно относительное расположение ПРЛС 1, ретранслятора 2 и ЗРЛС 10. Комплекс работает следующим образом. Сигнал, излученный ЗРЛС 10 (фиг.4), принимают антенной 12 ретранслятора 2 и передают его на вход приемника 14, с выхода приемника 14 сигнал подают на первый вход вычислителя 16. Работу вычислителя 16 синхронизируют с помощью датчика единого времени 17. Для этого с выхода датчика единого времени 17 подают сигнал на второй вход вычислителя 16. По известной дальности от ретранслятора 2 до ЗРЛС 10 вычислитель 16 по известным формулам определяет момент излучения сигнала ЗРЛС в едином времени. Эту информацию передают с выхода вычислителя 16 на вход передатчика 15, с его выхода сигнал подают на вход антенны 13 ретранслятора 2 и передают эту информацию кодом в едином времени на антенну 4 ПРЛС 1, с выхода антенны 4 сигнал подают на вход приемника 6 второго канала ПРЛС 1. Антенной 3 ПРЛС 1 принимают отраженный целью 9 сигнал, излученный ЗРЛС 10, и передают его на вход приемника 5 первого канала ПРЛС 1. Сигналы с выходов приемников 5 и 6 первого и второго каналов ПРЛС 1 подают на первый и второй входы измерителя дальности 11.
По определенному углу между направлением на цель 9 (фиг.3) и направлением на ЗРЛС 10, прямой задержке ΔT сигнала, излученного ЗРЛС 10 и принятого ПРЛС 1, рассчитанной по известной дальности d, и определенной задержке (отраженного от цели 9 сигнала относительно прямой задержке ΔT сигнала, излученного ЗРЛС 10, измеритель дальности 11, с помощью которого определяют дальность X0 до этой цели в полярных координатах по следующим формулам:
 ;
;  ;
;  R - радиус земли; L - расстояние до ЗРЛС по поверхности земли; а - проекция X0 с помощью нормали h на направление d; Хи - расстояние от ЗРЛС 10 до цели 9.
R - радиус земли; L - расстояние до ЗРЛС по поверхности земли; а - проекция X0 с помощью нормали h на направление d; Хи - расстояние от ЗРЛС 10 до цели 9.



где С - скорость света, а угол α рассчитывается по найденным азимутальному углу β и углу места ε цели 9 или измеряется непосредственно между направлением на цель 9 и направлением на ЗРЛС 10.
Из прямоугольных треугольников ΔПАС, ΔПАД и ΔПДС (углы ПСД и ПСА равны 90°), полагая сторону ПА равной единице, находим:
ПД=ПА∙Cosε=Cosε
ПС=ПД∙Cosβ=Cosβ×Cosε
ПС=ПА∙Cosα=Cosα
Cosα=Cosβ∙Cosε
α=arcosCosβ∙Cosε
Формула (1) справедлива для случая работы в единому времени. В способе, когда в качестве ретранслятора используется пассивный отражатель с точно известными координатами, т.е. нет единого времени, формула (1) также справедлива, но при этом τ=Δτрц+Δ(см. фиг.3),
где Δ равна разности расчетных задержек ΔТрет прохождения сигнала от ЗРЛС 10 до ПРЛС 1 через пассивный отражатель и задержкой прямого прохождения сигнала ΔT;
- Δτрц равна разности между ΔТц - задержкой отраженного от цели 9 сигнала и задержкой ΔТрет - эта величина определяется на ПРЛС.
Отсюда следует, что заявленное техническое решение позволяет обнаруживать цель и определять дальность до нее.
При выборе в качестве источника перевозимой ЗРЛС необходимо после ее развертывания определить ее координаты. Способы определения координат известны: либо по излучению (патент №2217773), либо визуально со спутника.
Наиболее целесообразно в качестве источника излучения выбирать стационарную ЗРЛС сопредельного государства.
Выбор в качестве источника излучений ЗРЛС дает следующие преимущества:
- легко вскрыть структуру сигнала и обеспечить согласованный прием;
- согласованный прием сигналов ЗРЛС позволяет увеличить дальность обнаружения и определять координаты цели с требуемой точностью и разрешающей способностью;
- обеспечивает стабильность работы, поскольку в ее задачи входит постоянный контроль пространства;
- маловероятна постановка помех с противоборствующей стороны;
- ЭПР цели существенно возрастает, если она находится вблизи линии, соединяющей ПРЛС и ЗРЛС (Справочник по радиолокации под редакцией М. Скольника т.4 с.209), а мощность излучения достаточна для обнаружения малоразмерных целей, например, при выборе в качестве излучателя станции ПРО, размещаемой в Европе.
- в случае работы в едином времени возможно расположение ретранслятора вне прямой видимости ПРЛС и передача информации на нее на частотах диапазонов УКВ, KB, ДВ или через спутник.
Таким образом достигается заявленный технический результат.
Способ определения угловых координат цели (варианты)
Способ стабилизации вероятности ложной тревоги
Способ стабилизации вероятности ложной тревоги и устройство для его реализации
Способ стабилизации вероятности ложной тревоги (варианты) и устройство для его реализации (варианты)
Способ радиолокационного обзора пространства (варианты)
Способ получения реагента для приготовления радиофармпрепарата на основе меченного технецием-99м ципрофлоксацина с сохранением его стабильности при длительном хранении
Способ получения реагента для приготовления радиофармпрепарата на основе меченного технецием-99м ципрофлоксацина
Способ определения координат целей и комплекс для его реализации
Способ определения координат источника радиоизлучения-постановщика ответной помехи и способ определения координат целей, облучаемых постановщиком ответной помехи
Способ распознавания трассы цели и ложной трассы, формируемой синхронной ответной помехой (варианты)
Способ определения угловых координат цели (варианты)
Способ стабилизации вероятности ложной тревоги
Способ стабилизации вероятности ложной тревоги и устройство для его реализации
Способ стабилизации вероятности ложной тревоги (варианты) и устройство для его реализации (варианты)
Способ радиолокационного обзора пространства (варианты)
Способ получения реагента для приготовления радиофармпрепарата на основе меченного технецием-99м ципрофлоксацина
Способ определения координат целей и комплекс для его реализации
Способ определения координат источника радиоизлучения-постановщика ответной помехи и способ определения координат целей, облучаемых постановщиком ответной помехи
Способ распознавания трассы цели и ложной трассы, формируемой синхронной ответной помехой (варианты)
Способ определения координат целей и комплекс для его реализации

