Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ И УСТРОЙСТВО УПРАВЛЕНИЯ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству управления двигателем и способу управления для управления крутящим моментом двигателя на основе целевого крутящего момента и мониторинга крутящего момента, который фактически формируется двигателем.
Уровень техники
[0002] Существует технология для мониторинга крутящего момента двигателя, при этом задавая целевое значение крутящего момента двигателя в качестве целевого крутящего момента и управляя крутящим моментом двигателя так, чтобы реализовывать целевой крутящий момент. Более конкретно, эта технология должна вычислять крутящий момент, который фактически формируется двигателем в качестве фактического крутящего момента, и сравнивать фактический крутящий момент с допустимым крутящим моментом.
[0003] При этом, в качестве технологии для мониторинга крутящего момента двигателя, JP2008-510921A описывает следующее (абзацы 0022-0025).
[0004] Технология устанавливает опорный крутящий момент в качестве целевого значения крутящего момента двигателя из величины задействования педали акселератора и управляет работой клапана для впрыска топлива на основе опорного крутящего момента. С другой стороны, технология вычисляет фактический крутящий момент, который фактически формируется двигателем, из рабочих параметров двигателя и затем записывает возникновение ошибки и останавливает работу клапана для впрыска топлива с точки зрения безопасности, когда фактический крутящий момент превышает допустимый крутящий момент, установленный на основе опорного крутящего момента. При этом, технология определяет время впрыска и давление впрыска (давление топлива) клапана для впрыска топлива в качестве рабочих параметров двигателя и рассматривает индивидуальные характеристики клапана для впрыска топлива в случае вычисления фактического крутящего момента на основе времени впрыска и т.д. В качестве характеристик для рассмотрения при вычислении фактического крутящего момента JP2008-510921A публикует производственное отклонение или погрешность (в частности, диаметр отверстия сопла клапана для впрыска топлива) и возрастные характеристики клапана для впрыска топлива.
Сущность изобретения
[0005] Согласно технологии, описанной в JP2008-510921A, когда крутящий момент двигателя увеличивается независимо от намерения водителя вследствие некоторых функциональных проблем клапана для впрыска топлива, увеличение обнаруживается посредством сравнения между фактическим крутящим моментом и допустимым крутящим моментом, и работа клапана для впрыска топлива останавливается, с тем, чтобы иметь возможность обеспечивать безопасность. Например, когда давление впрыска топлива выше целевого значения согласно опорному крутящему моменту, фактическая величина впрыска топлива превышает целевую величину, и двигатель формирует крутящий момент больше опорного крутящего момента, могут быть обнаружены нарушения, поскольку фактический крутящий момент превышает допустимый крутящий момент.
[0006] Однако, когда фактический крутящий момент вычисляется как значение, меньшее, чем исходное значение, поскольку обнаружение давления впрыска является неточным, или процесс вычисления фактического крутящего момента на основе давления впрыска имеет нарушение, возникает такая проблема, что такое нарушение не может быть обнаружено, поскольку вычисленный фактический крутящий момент все еще сохраняет значение, меньшее, чем допустимый крутящий момент, даже если двигатель формирует крутящий момент больше допустимого крутящего момента.
[0007] Следовательно, задачей изобретения является необходимость иметь возможность более точно вычислять крутящий момент, который фактически формируется двигателем, и, таким образом, способствовать более надлежащему управлению двигателем.
[0008] Настоящее изобретение предоставляет способ управления двигателем в одном аспекте.
[0009] Способ согласно одному аспекту настоящего изобретения является способом управления двигателем, в котором целевой крутящий момент двигателя устанавливается, и крутящий момент двигателя управляется на основе заданного целевого крутящего момента. Способ включает в себя: установку допустимого крутящего момента больше целевого крутящего момента; обнаружение множества различных параметров рабочего состояния в качестве указателей, указывающих фактическое рабочее состояние двигателя; индивидуальное вычисление фактических крутящих моментов, которые являются фактическими крутящими моментами двигателя на основе множества обнаруженных параметров рабочего состояния; и выбор наибольшего значения среди вычисленных фактических крутящих моментов в качестве окончательного фактического крутящего момента. Способ дополнительно включает в себя: сравнение вычисленного фактического крутящего момента с допустимым крутящим моментом; и формирование управляющего сигнала согласно результату сравнения между фактическим крутящим моментом и допустимым крутящим моментом.
Краткое описание чертежей
[0010] Фиг. 1 является схемой полной конфигурации, иллюстрирующей двигатель согласно варианту осуществления настоящего изобретения.
Фиг. 2 является блок-схемой последовательности операций, схематично иллюстрирующей последовательность управления двигателем согласно варианту осуществления.
Фиг. 3 является блок-схемой последовательности операций, иллюстрирующей содержимое процесса определения ненормального крутящего момента при управлении двигателем.
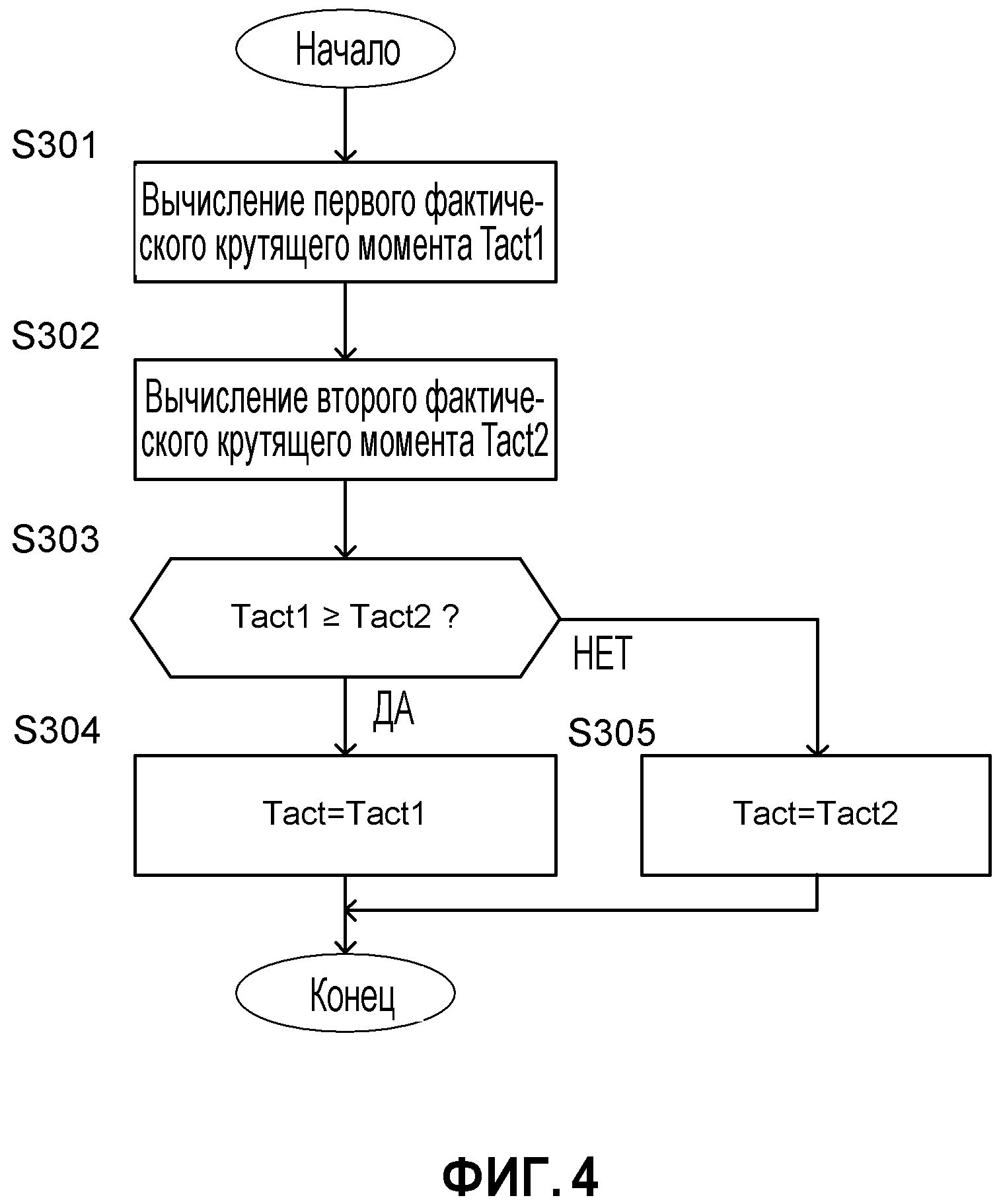
Фиг. 4 является блок-схемой последовательности операций, иллюстрирующей содержимое процесса вычисления фактического крутящего момента при управлении двигателем.
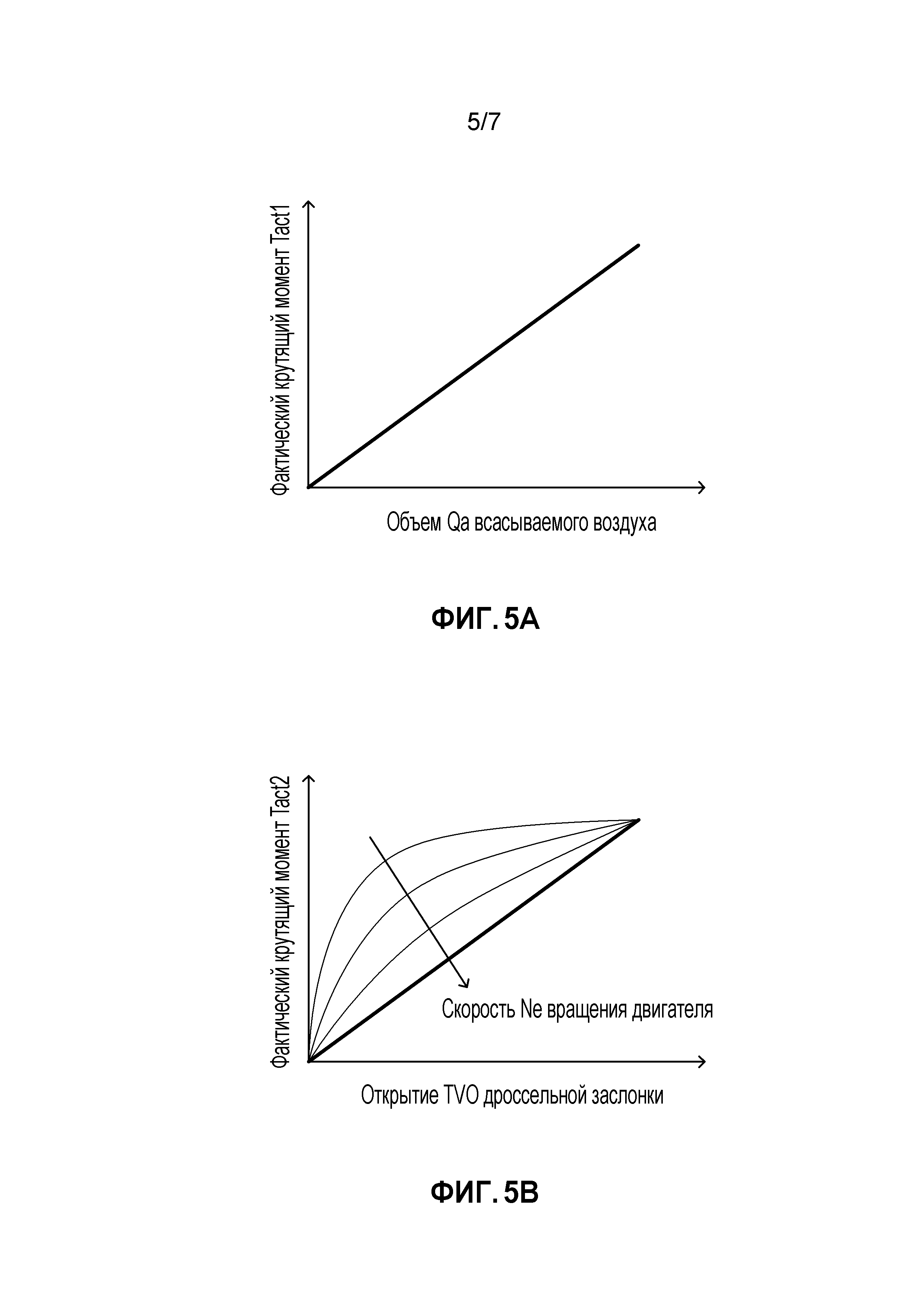
Фиг. 5A является схемой, объясняющей тенденцию данных карты управления, используемых для вычисления первого фактического крутящего момента.
Фиг. 5B является схемой, объясняющей тенденцию данных карты управления, используемых для вычисления второго фактического крутящего момента.
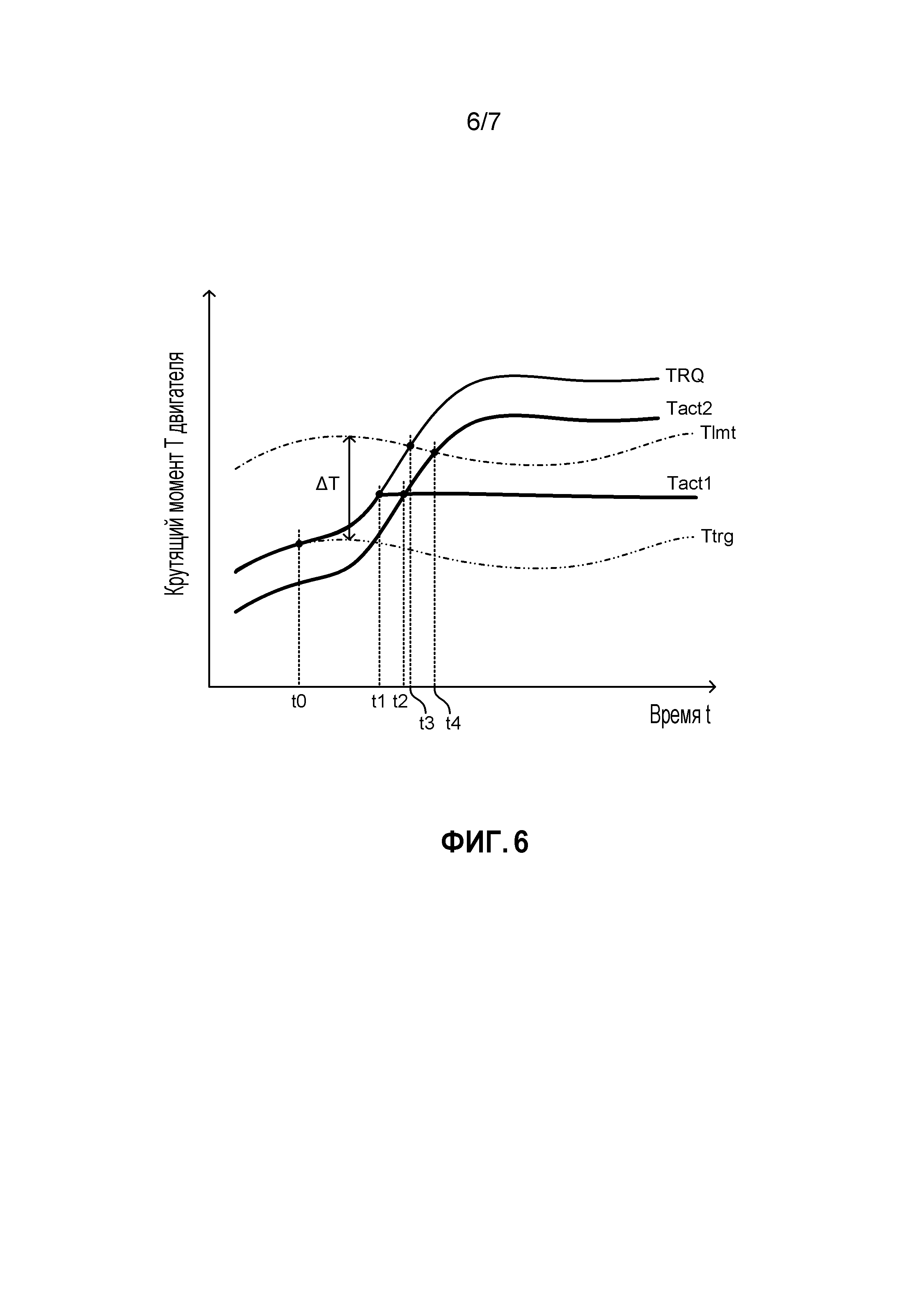
Фиг. 6 является схемой, объясняющей работу электронного блока управления, относящуюся к определению ненормального крутящего момента.
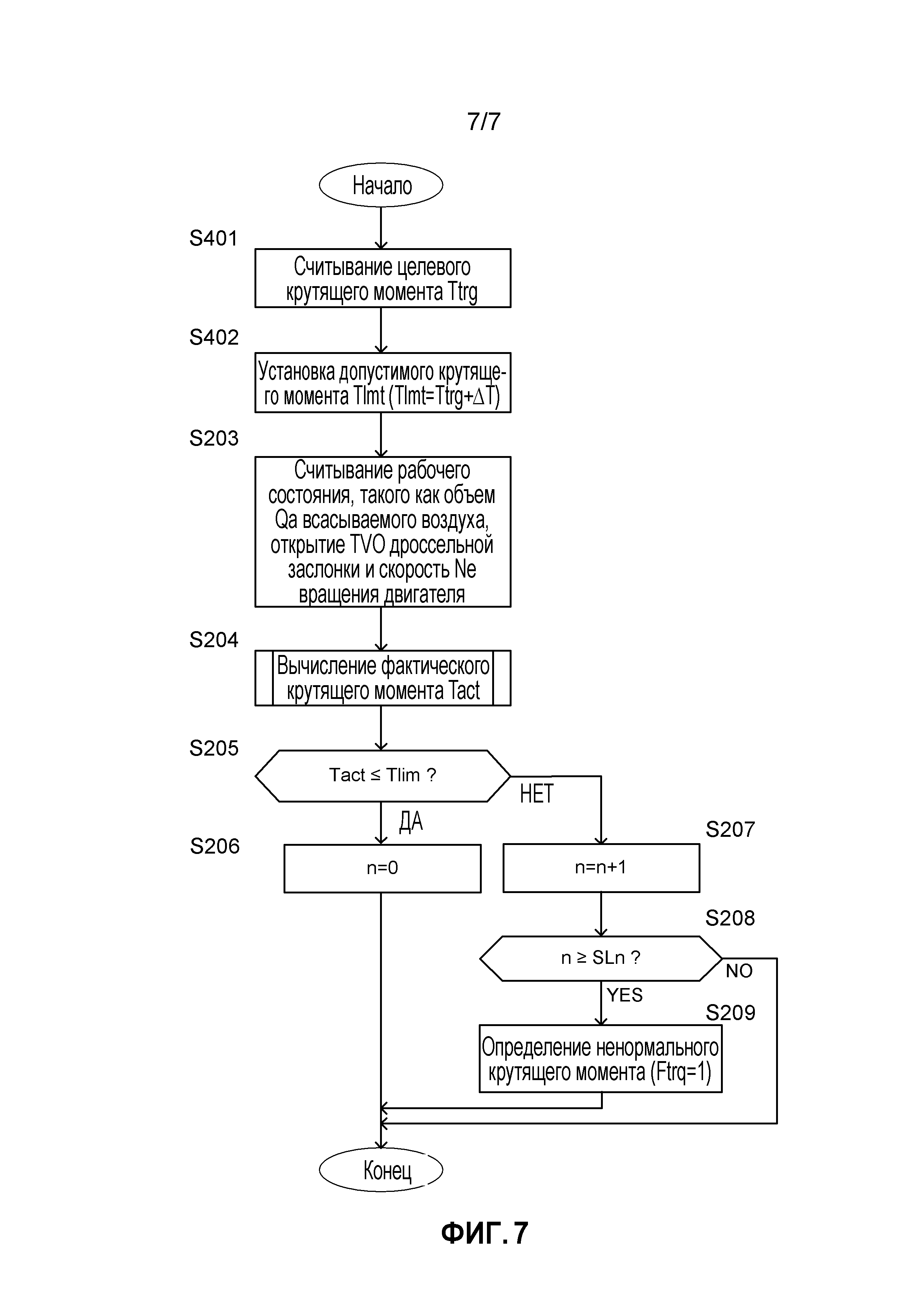
Фиг. 7 является блок-схемой последовательности операций, схематично иллюстрирующей последовательность управления двигателем согласно другому варианту осуществления настоящего изобретения.
Подробное описание вариантов осуществления
[0011] Далее в данном документе примерные варианты осуществления настоящего изобретения будут объяснены со ссылкой на сопровождающие чертежи.
[0012] (Полная конфигурация двигателя)
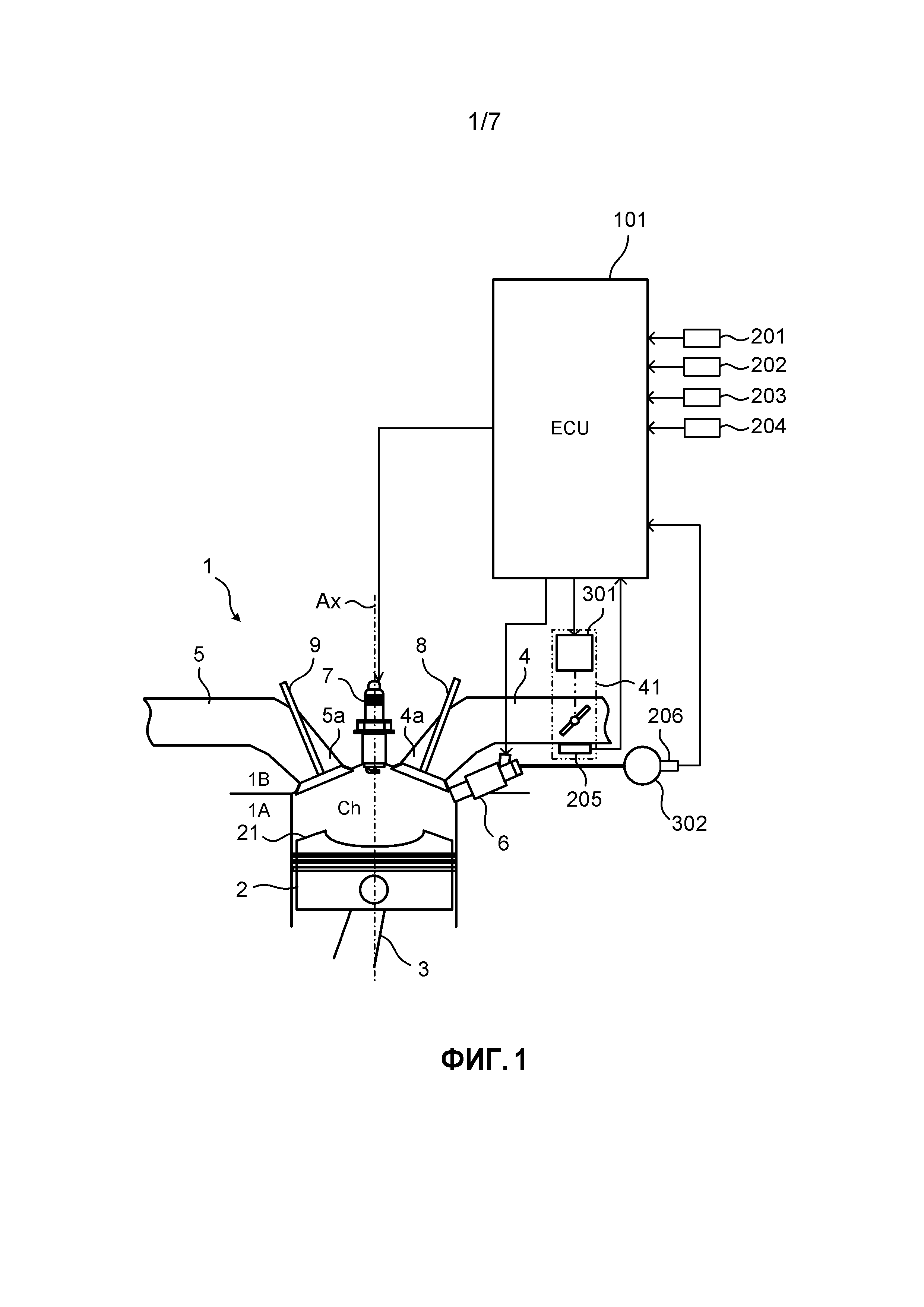
Фиг. 1 является схемой полной конфигурации, иллюстрирующей двигатель 1 согласно варианту осуществления настоящего изобретения (далее в данном документе просто называемый "двигателем").
[0013] В настоящем варианте осуществления двигатель 1 является двигателем с прямым впрыском топлива и конфигурируется, чтобы иметь возможность непосредственно впрыскивать топливо в цилиндр. Двигатель 1 не ограничивается двигателем с прямым впрыском топлива и может быть двигателем с впрыском во впускной канал, который впрыскивает топливо в часть 4a отверстия впускного канала 4. Фиг. 1 иллюстрирует только один цилиндр ради удобства. Однако, число цилиндров не ограничивается одним, и, само собой разумеется, что число цилиндров может быть двумя или более.
[0014] Что касается двигателя 1, его основная часть формируется посредством блока 1A цилиндра и головки 1B цилиндра, и цилиндр формируется как пространство, окруженное блоком 1A цилиндра и головкой 1B цилиндра.
[0015] Поршень 2 вставляется в блок 1A цилиндра, чтобы иметь возможность выполнять возвратно-поступательное движение вверх и вниз вдоль центральной оси Ax цилиндра, и поршень 2 соединяется с коленчатым валом (не иллюстрирован) через шатун 3. Возвратно-поступательное движение поршня 2 передается коленчатому валу через шатун 3 и преобразуется во вращательное движение коленчатого вала. Верхняя поверхность 21 поршня 2 имеет полость, сформированную на ней. Соответственно, плавный поток воздуха, всасываемого в цилиндр через часть отверстия (впускное отверстие) 4a впускного канала 4, ограничивается от заслонения верхней поверхностью 21 поршня, и топливо, впрыскиваемое посредством клапана 6 впрыска топлива, направляется посредством поверхности стенки полости к головке для свечи 7 зажигания.
[0016] Головка 1B цилиндра имеет нижнюю поверхность, определяющую камеру Ch сгорания с односкатной крышей. Камера Ch сгорания формируется как пространство, окруженное нижней поверхностью головки 1B цилиндра и верхней поверхностью 21 поршня 2. В качестве каналов, которые сообщаются между камерой Ch сгорания и внешней стороной двигателя 1, головка 1B цилиндра имеет пару впускных каналов 4 на одной стороне и пару выпускных каналов 5 на другой стороне центральной оси Ax цилиндра. Впускной клапан 8 помещается в часть отверстия (впускное отверстие) 4a впускного канала 4, а выпускной клапан 9 помещается в часть отверстия (выпускное отверстие) 5a выпускного канала 5. Воздух, захваченный во впускной канал 4 снаружи двигателя 1, всасывается в цилиндр во время открытия впускного клапана 8, а отработавший газ после сгорания выпускается в выпускной канал 5 во время открытия выпускного клапана 9.
[0017] Впускной канал 4 снабжается электронно-управляемой дроссельной заслонкой 41. Расход воздуха, всасываемого в цилиндр через впускной канал 4, управляется посредством электронно-управляемой дроссельной заслонки 41. Электронно-управляемая дроссельная заслонка 41 имеет двустворчатый клапан в качестве тела клапана, и вал его вращения соединяется с актуатором (далее в данном документе называемым "приводом дроссельной заслонки") 301. Позиция вращения (далее в данном документе называемая "открытием дроссельной заслонки") корпуса клапана управляется посредством привода 301 дроссельной заслонки.
[0018] Кроме того, в головке 1B цилиндра, свеча 7 зажигания предусматривается между впускным отверстием 4a и выпускным отверстием 5a вдоль центральной оси Ax цилиндра, и клапан 6 для впрыска топлива помещается между парой впускных отверстий 4a и 4a на одной стороне центральной оси Ax цилиндра. Клапан 6 для впрыска топлива конфигурируется и размещается, чтобы снабжаться топливом из накопителя топлива (топливопровода высокого давления) 302, который ведет к топливному баку (не иллюстрирован), и непосредственно впрыскивать топливо в цилиндр.
[0019] Каталитический нейтрализатор (не иллюстрирован) вставляется в выпускной канал 5, и катализатор для очистки отработавшего газа помещается в каталитический нейтрализатор. В настоящем варианте осуществления устройство очистки отработавшего газа является трехкомпонентным нейтрализатором. Отработавший газ после сгорания, выпущенный в выпускной канал 5, выпускается в атмосферный воздух, после того как вредные компоненты, такие как окись азота (NOx), окись углерода (CO) и углеводород (HC), очищаются посредством катализатора для очистки отработавшего газа.
[0020] (Конфигурация системы управления)
Работа двигателя 1 управляется посредством электронного блока 101 управления. Электронный блок 101 управления составляет "блок управления двигателем" согласно настоящему варианту осуществления и включает в себя микрокомпьютер, который включает в себя центральный процессор (CPU), различные запоминающие устройства, такие как RAM и ROM, интерфейс ввода-вывода и т.п. Электронный блок 101 управления принимает сигналы обнаружения "датчика 201 ускорения, датчика 202 скорости вращения и датчика 203 температуры охлаждающей жидкости" и сигналы обнаружения "расходомера 204 воздуха, датчика 205 дроссельной заслонки, датчика 206 давления топлива, датчика отношения воздух-топливо (не иллюстрирован) и т.п.".
[0021] Датчик 201 ускорения обнаруживает величину задействования (далее в данном документе называемую "величиной задействования педали акселератора") для педали акселератора, выполняемого водителем. Величина задействования педали акселератора представляет указатель нагрузки, требуемой для двигателя 1. Датчик 202 скорости вращения обнаруживает скорость вращения двигателя 1. Датчик 202 скорости вращения может использовать датчик угла поворота коленчатого вала. Датчик угла поворота коленчатого вала преобразует сигнал (сигнал единичного угла поворота коленчатого вала), выводимый при каждом единичном угле поворота коленчатого вала, или сигнал (опорный сигнал угла поворота коленчатого вала), выводимый при каждом опорном угле поворота коленчатого вала, в число оборотов (например, число оборотов в минуту, далее в данном документе называемое "скоростью вращения двигателя") в единицу времени, с тем, чтобы определять скорость вращения. Датчик 203 температуры охлаждающей жидкости обнаруживает температуру охлаждающей жидкости двигателя. Вместо температуры охлаждающей жидкости двигателя вариант осуществления может использовать температуру смазочного масла двигателя.
[0022] Расходомер 204 воздуха предусматривается во входной части впускного канала 4, чтобы обнаруживать расход воздуха (объем всасываемого воздуха), всасываемого в двигатель 1. В настоящем варианте осуществления расходомер 204 воздуха конфигурируется посредством расходомера с нагреваемым проводом. Датчик 205 дроссельной заслонки обнаруживает позицию вращения (открытие дроссельной заслонки) корпуса клапана электронно-управляемого устройства 41 дроссельной заслонки. В настоящем варианте осуществления датчик 205 дроссельной заслонки конфигурируется посредством потенциометра и собирается в электронно-управляемое устройство 41 дроссельной заслонки. Датчик 206 давления сжигания предусматривается в топливопроводе 302 высокого давления, чтобы обнаруживать давление топлива, которое должно подаваться к клапану 6 впрыска топлива. Датчик отношения воздух-топливо предусматривается в выпускном канале 5, чтобы обнаруживать отношение воздух-топливо отработавшего газа.
[0023] Электронный блок 101 управления включает в себя запоминающее устройство (в настоящем варианте осуществления ROM), которое хранит данные карты управления, для которых предназначаются различные величины управления работой, такие как целевой крутящий момент, в соответствии с рабочими состояниями двигателя, такие как нагрузка, скорость вращения и температура охлаждающей жидкости двигателя 1. Во время фактической работы двигателя 1 электронный блок управления устанавливает величину впрыска топлива, момент впрыска топлива, момент зажигания и т.п. со ссылкой на данные карты управления запоминающего устройства на основе рабочего состояния двигателя 1.
[0024] (Основная процедура управления двигателем)
Содержимое управления, которое выполняется посредством электронного блока 101 управления, будет объяснено со ссылкой на блок-схему последовательности операций.
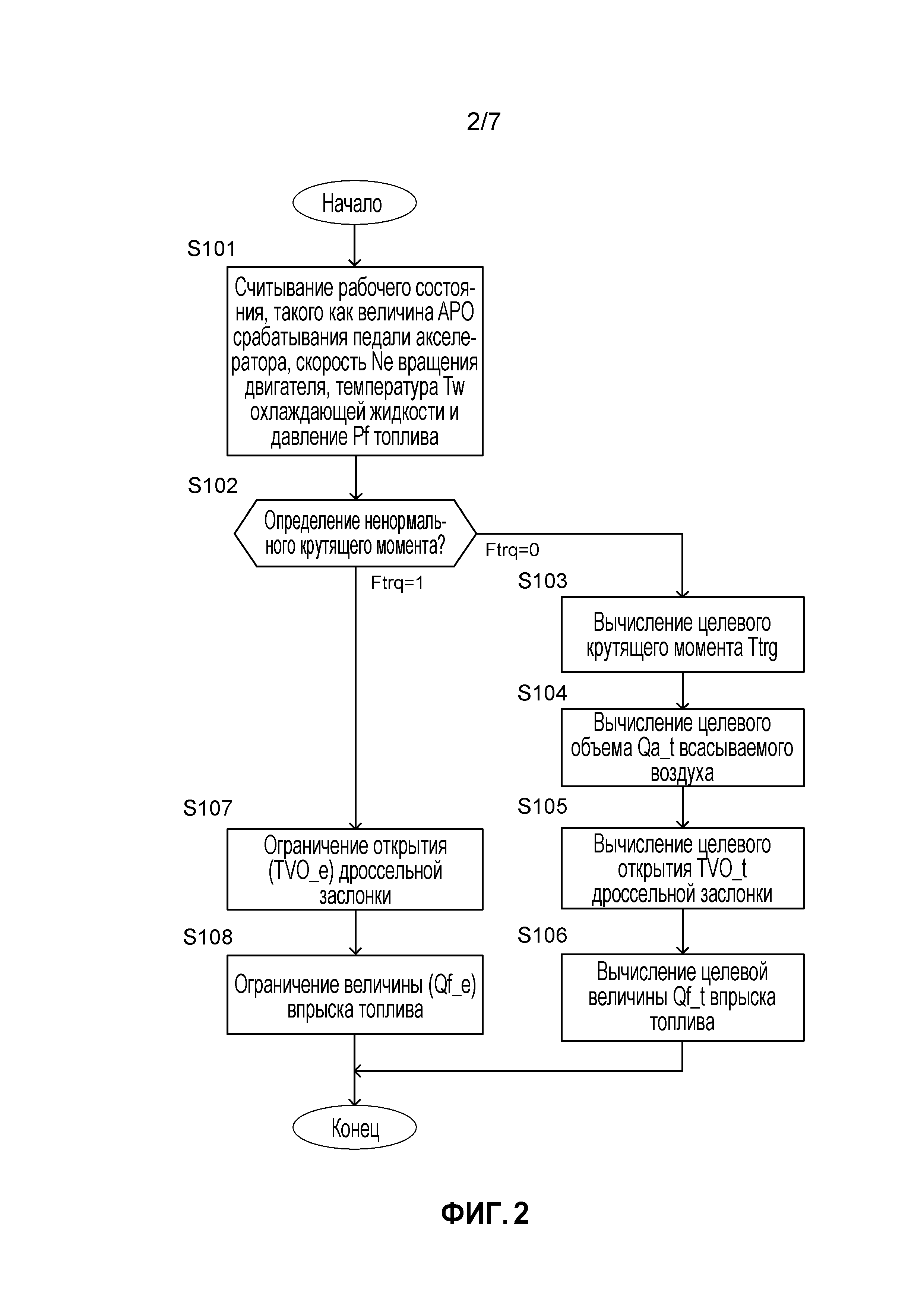
[0025] Фиг. 2 является блок-схемой последовательности операций, схематично иллюстрирующей последовательность основной процедуры управления двигателем согласно настоящему варианту осуществления. Электронный блок 101 управления выполняет процедуру управления, иллюстрированную на фиг. 2, в каждое предварительно определенное время после завершения прогрева двигателя 1.
[0026] На этапе S101 электронный блок управления считывает величину APO задействования педали акселератора, скорость Ne вращения двигателя, температуру Tw охлаждающей жидкости, давление Pf топлива и т.п. в качестве параметров, указывающих рабочее состояние двигателя 1.
[0027] На этапе S102 электронный блок управления считывает флаг Ftrq определения неисправности, который будет описан позже, как результат определения ненормального крутящего момента. Электронный блок управления перемещает управление на этап S103, когда значение флага равно нулю, и перемещает управление на этап S107, когда значение флага равно единице. Флаг Ftrq определения неисправности устанавливается в ноль во время погрузки или доставки транспортного средства, оснащенного двигателем 1, с промышленного производства или из ремонтной мастерской. Посредством выполнения процесса определения ненормального крутящего момента, иллюстрированного на фиг. 3, флаг Ftrq определения неисправности сохраняется нулевым или изменяется в единицу в соответствии с результатом сравнения между фактическим крутящим моментом Tact и допустимым крутящим моментом Tlim. Флаг Ftrq определения неисправности сохраняется равным единице, даже после того как двигатель 1 останавливается, когда значение изменяется с нуля на единицу, и перезаписывается в ноль во время завершения требуемого ремонта в ремонтной мастерской.
[0028] На этапе S103 электронный блок управления вычисляет целевой крутящий момент Ttrg двигателя 1 на основе величины APO задействования педали акселератора и скорости Ne вращения двигателя. Вычисление целевого крутящего момента Ttrg выполняется посредством обращения к данным карты управления, которым целевой крутящий момент Ttrg назначается в соответствии с величиной APO задействования педали акселератора и скоростью Ne вращения двигателя.
[0029] На этапе S104 электронный блок управления вычисляет целевое значение (целевой объем всасываемого воздуха) Qa_t для объема всасываемого воздуха согласно целевому крутящему моменту Ttrg. Целевой объем Qa_t всасываемого воздуха устанавливается в большее значение, когда целевой крутящий момент Ttrg растет еще больше.
[0030] На этапе S105 электронный блок управления вычисляет целевое значение (целевое открытие дроссельной заслонки) TVO_t открытия дроссельной заслонки на основе целевого объема Qa_t всасываемого воздуха и скорости Ne вращения двигателя. Вычисление целевого открытия TVO_t дроссельной заслонки выполняется посредством обращения к данным карты управления, которым целевое открытие TVO_t дроссельной заслонки согласно целевому объему Qa_t всасываемого воздуха назначается для каждой скорости Ne вращения двигателя. Электронный блок 101 управления устанавливает возбуждающий сигнал согласно целевому открытию TVO_t дроссельной заслонки и выводит возбуждающий сигнал электронно-управляемому устройству 41 дроссельной заслонки.
[0031] На этапе S106 электронный блок управления вычисляет целевое значение (целевую величину впрыска топлива) Qf_t для величины впрыска топлива согласно целевому объему Qa_t всасываемого воздуха. Целевая величина Qf_t впрыска топлива устанавливается в большее значение, по мере того как целевой объем Qa_t всасываемого воздуха растет. Поправка согласно температуре Tw охлаждающей жидкости и т.д. выполняется по целевой величине Qf_t впрыска топлива, вычисленной таким образом, и окончательная целевая величина Qf_t впрыска топлива вычисляется. Электронный блок 101 управления устанавливает возбуждающий сигнал согласно целевой величине Qf_t впрыска топлива и давлению Pf топлива и выводит возбуждающий сигнал клапану 6 для впрыска топлива. В настоящем варианте осуществления электронный блок управления устанавливает целевую величину Qf_t впрыска топлива равной относительно целевого объема Qa_t всасываемого воздуха, но может рассматривать целевое отношение воздух-топливо при вычислении целевой величины Qf_t впрыска топлива при изменении целевого отношения воздух-топливо в соответствии с рабочей зоной двигателя 1.
[0032] На этапах S107 и S108 электронный блок управления запрещает управление двигателем на основе величины APO задействования педали акселератора или целевого крутящего момента Ttrg и ограничивает приведение в действие двигателя 1. Другими словами, электронный блок управления ограничивает крутящий момент, который должен формироваться двигателем 1, значением, меньшим, чем целевой крутящий момент Ttrg согласно величине APO задействования педали акселератора.
[0033] На этапе S107 электронный блок управления устанавливает открытие TVO дроссельной заслонки электронно-управляемого устройства 41 дроссельной заслонки в ограниченное открытие TVO дроссельной заслонки, меньшее, чем целевое открытие TVO_t дроссельной заслонки согласно величине APO задействования педали акселератора. В настоящем варианте осуществления ограниченное открытие TVO_e дроссельной заслонки является фиксированным значением или вычисленным значением, достаточным, только чтобы предоставлять возможность движения на низкой скорости или движения для эвакуации к ремонтной мастерской транспортного средства. В качестве примера, фиксированное значение может быть значением, по которому только движение для эвакуации, имеющее скорость 30 км/ч в качестве верхнего ограничения, может быть выполнено. Чтобы предоставлять возможность плавной остановки и запуска во время движения для эвакуации, электронный блок управления может устанавливать ограниченное открытие TVO_e дроссельной заслонки в качестве вычисленного значения и изменять открытие, пока скорость транспортного средства не превышает 30 км/ч. Электронный блок 101 управления выводит командный сигнал ограничения в электронно-управляемое устройство 41 дроссельной заслонки. Затем, электронно-управляемое устройство 41 дроссельной заслонки принимает командный сигнал ограничения от электронного блока 101 управления и приводит корпус клапана в позицию вращения, соответствующую ограниченному открытию TVO_e дроссельной заслонки с помощью привода 301 дроссельной заслонки. В данном документе "командный сигнал ограничения" соответствует "управляющему сигналу", который формируется, чтобы ограничивать приведение в действие двигателя 1.
[0034] На этапе S108 электронный блок управления устанавливает величину Qf впрыска топлива в ограниченную величину Qf_e впрыска топлива, меньшую, чем целевая величина Qf_t впрыска топлива согласно величине APO задействования педали акселератора, и запрещает движение транспортного средства со скоростью транспортного средства более 30 км/ч.
[0035] В настоящем варианте осуществления, когда флаг Ftrq определения неисправности изменяется в единицу посредством процесса определения ненормального крутящего момента, а именно, когда определяется, что флаг Ftrq неисправности равен единице на этапе определения, иллюстрированном по ссылке S102, электронный блок управления ограничивает приведение в действие двигателя 1 посредством процесса, иллюстрированного на этапах S107 и S108, и останавливает процесс определения ненормального крутящего момента (включающего в себя вычисление фактического крутящего момента Tact), чтобы сохранять флаг Ftrq определения неисправности в единице.
[0036] (Процедура определения ненормального крутящего момента)
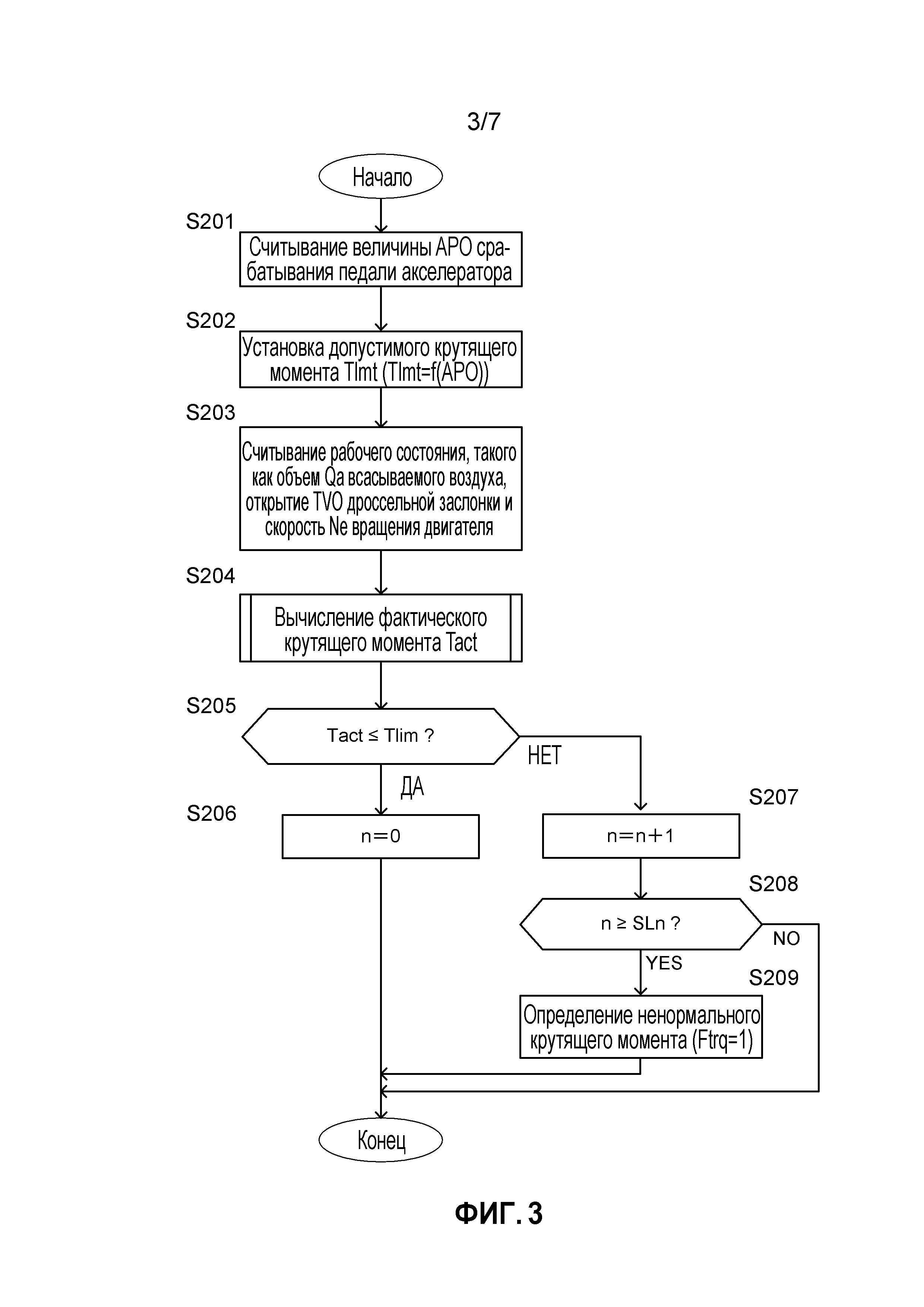
Фиг. 3 является блок-схемой последовательности операций, иллюстрирующей последовательность процедуры определения ненормального крутящего момента для управления двигателем согласно настоящему варианту осуществления. Электронный блок 101 управления выполняет процедуру управления, иллюстрированную на фиг. 3, в каждое предварительно определенное время после завершения прогрева двигателя 1.
[0037] На этапе S201 электронный блок управления считывает величину APO задействования педали акселератора и скорость Ne вращения двигателя.
[0038] На этапе S202 электронный блок управления вычисляет допустимый крутящий момент Tlmt, чтобы наблюдать крутящий момент двигателя на основе считанной величины APO задействования педали акселератора и т.д. Допустимый крутящий момент Tlmt устанавливается в значение, большее, чем целевой крутящий момент Ttrg. В настоящем варианте осуществления допустимый крутящий момент Tlmt вычисляется посредством обращения к данным карты управления, которым допустимый крутящий момент Tlmt назначается в соответствии с величиной APO задействования педали акселератора и скоростью Ne вращения двигателя. Данные карты управления для вычисления допустимого крутящего момента Tlmt устанавливаются отдельно от данных карты управления для вычисления целевого крутящего момента Ttrg и хранятся в запоминающем устройстве (например, ROM) электронного блока 101 управления. В данных карты управления допустимый крутящий момент Tlmt устанавливается, чтобы указывать увеличивающийся или уменьшающийся тренд, аналогичный тренду целевого крутящего момента Ttrg относительно величины APO задействования педали акселератора и т.д. В настоящем варианте осуществления допустимый крутящий момент Tlmt устанавливается имеющим большее значение, чем целевой крутящий момент Ttrg, на предварительно определенный крутящий момент ΔT.
[0039] На этапе S203 электронный блок управления считывает объем Qa всасываемого воздуха, открытие TVO дроссельной заслонки и скорость Ne вращения двигателя в качестве параметров, указывающих рабочее состояние двигателя для двигателя 1. В данном документе объем Qa всасываемого воздуха и открытие TVO дроссельной заслонки, соответственно, соответствуют "первому параметру рабочего состояния" и "второму параметру рабочего состояния", которые указывают фактическое рабочее состояние двигателя 1.
[0040] На этапе S204 электронный блок управления вычисляет целевой крутящий момент, фактически формируемый двигателем 1, в качестве целевого крутящего момента Tact. Вычисление фактического крутящего момента Tact будет объяснено позже со ссылкой на блок-схему последовательности операций, иллюстрированную на фиг. 4.
[0041] На этапе S205 электронный блок управления определяет, действительно ли фактический крутящий момент Tact не больше допустимого крутящего момента Tlmt. Электронный блок управления перемещает управление на этап S206, когда фактический крутящий момент Tact не больше допустимого крутящего момента Tlmt, и перемещает управление на этап S207 при превышении допустимого крутящего момента Tlmt.
[0042] На этапе S206 электронный блок управления определяет, что крутящий момент двигателя сдерживается в значении, не большем, чем допустимый крутящий момент Tlmt, и, таким образом, управление двигателем нормально выполняется, и сохраняет флаг Ftrq определения неисправности равным нулю и устанавливает значение "n" счетчика в ноль (n=0).
[0043] На этапе S207 электронный блок управления добавляет единицу к значению "n" счетчика (n=n+1).
[0044] На этапе S208 электронный блок управления определяет, достигает ли значение "n" счетчика после добавления предварительно определенного значения SLn. Электронный блок управления перемещает управление на этап S209, когда значение "n" счетчика достигает предварительно определенного значения SLn, и завершает эту процедуру управления при недостижении предварительно определенного значения.
[0045] На этапе S209 электронный блок управления определяет, что двигатель 1 формирует чрезмерно большой крутящий момент, и, таким образом, управление двигателем имеет некоторые нарушения, и изменяет флаг Ftrq определения неисправности в единицу. Как описано выше, в настоящем варианте осуществления, когда фактический крутящий момент Tact превышает допустимый крутящий момент Tlmt (S205), и определение того, что крутящий момент двигателя является чрезмерным, непрерывно повторяется число раз, определенное посредством предварительно определенного значения SLn, электронный блок управления определяет, что управление двигателем имеет нарушение. В результате, возможно предотвращать определение возникновения нарушения во время работы в переходном режиме и ограничение приведения в действие двигателя 1.
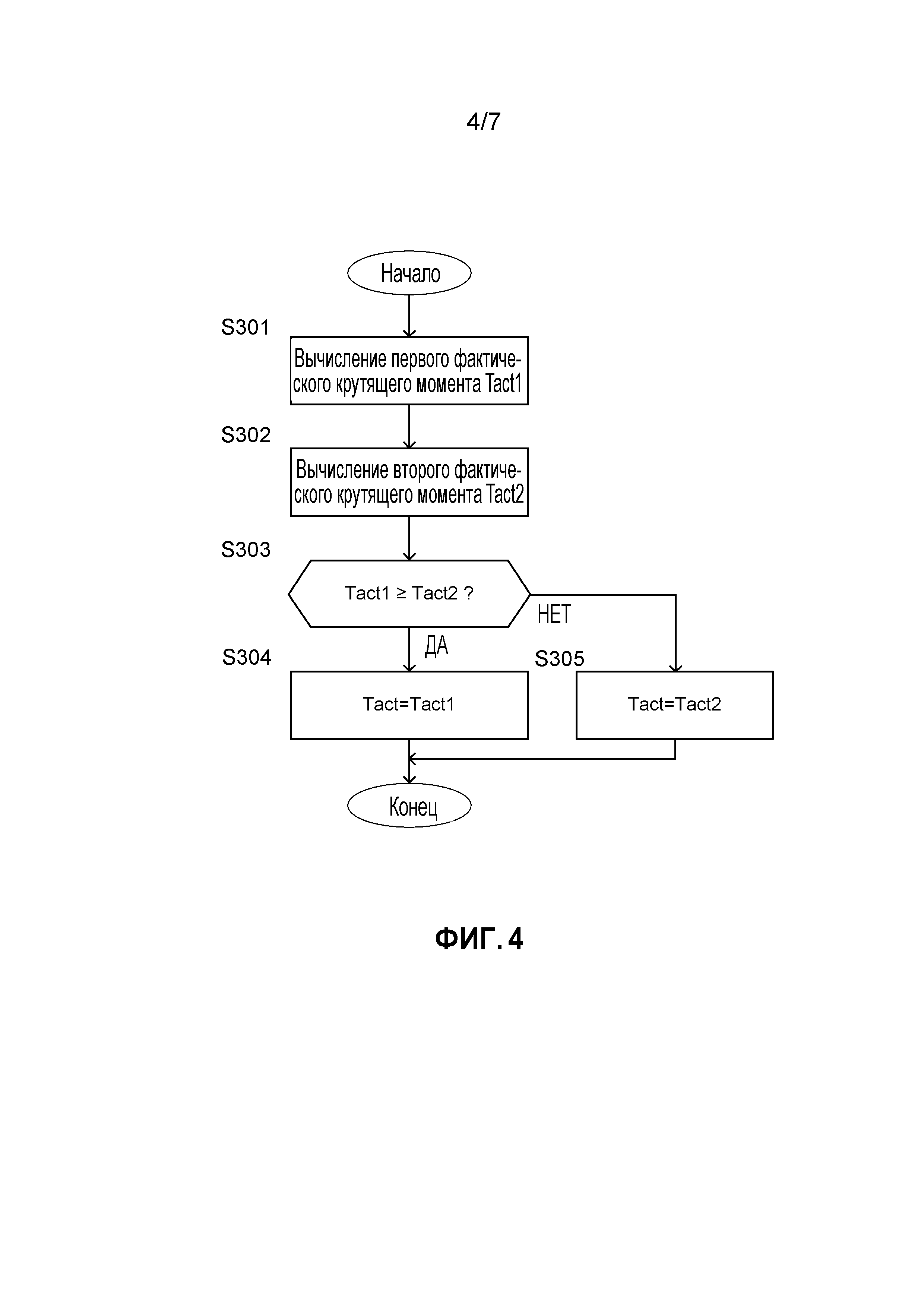
[0046] Фиг. 4 является блок-схемой последовательности операций, иллюстрирующей содержимое процесса вычисления фактического крутящего момента, выполняемого на этапе S204 процедуры управления, иллюстрированной на фиг. 3.
[0047] На этапе S301 электронный блок управления вычисляет первый фактический крутящий момент Tact1 на основе объема Qa всасываемого воздуха. В настоящем варианте осуществления вычисление первого фактического крутящего момента Tact1 выполняется посредством обращения к данным карты управления, имеющим тенденцию, иллюстрированную на фиг. 5A, которым первый фактический крутящий момент Tact1 назначается в соответствии с объемом Qa всасываемого воздуха. Первый фактический крутящий момент Tact1 вычисляется как большее значение, когда объем Qa всасываемого воздуха растет более значительно.
[0048] На этапе S302 электронный блок управления вычисляет второй фактический крутящий момент Tact2 на основе открытия TVO дроссельной заслонки и скорости Ne вращения двигателя. Вычисление второго фактического крутящего момента Tact2 выполняется посредством обращения к данным карты управления, имеющим тенденцию, иллюстрированную на фиг. 5B, которым второй фактический крутящий момент Tact2 согласно открытию TVO дроссельной заслонки назначается для каждой скорости Ne вращения двигателя. Второй фактический крутящий момент Tact2 вычисляется как большее значение, когда открытие TVO дроссельной заслонки вырастает более значительно, но тенденция изменения во втором фактическом крутящем моменте Tact2 относительно открытия TVO дроссельной заслонки отличается в соответствии со скоростью Ne вращения двигателя.
[0049] В настоящем варианте осуществления электронный блок управления умножает предварительно определенное значение α меньше единицы на второй фактический крутящий момент Tact2, вычисленный на основе открытия TVO дроссельной заслонки и скорости NE вращения двигателя, и устанавливает это значение умножения (=Tact2×α) в качестве окончательного второго фактического крутящего момента Tact2. Поскольку считается, что первый фактический крутящий момент Tact1 имеет свойство, более близкое к измеренному значению на основе объема Qa всасываемого воздуха, это, в целом, должно гарантировать, что первый фактический крутящий момент Tact1 выбирается в качестве окончательного фактического крутящего момента Tact в сравнении, описанном ниже. В этом отношении, однако, когда точность второго фактического крутящего момента Tact2 может быть в достаточной мере обеспечена посредством отражения атмосферного давления в вычислении второго фактического крутящего момента Tact2, например, предварительно определенное значение α может быть увеличено в соответствии с точностью и, таким образом, предварительно определенное значение α может быть установлено в 1.
[0050] На этапе S303 электронный блок управления определяет, действительно ли первый фактический крутящий момент Tact1 не меньше второго фактического крутящего момента Tact2. Электронный блок управления перемещает управление на этап S304, когда первый фактический крутящий момент Tact1 не меньше второго фактического крутящего момента Tact2, и перемещает управление на этап S305, когда меньше второго фактического крутящего момента Tact2.
[0051] На этапе S304 электронный блок управления выбирает первый фактический крутящий момент Tact1 в качестве окончательного фактического крутящего момента Tact (Tact=Tact1).
[0052] На этапе S305 электронный блок управления выбирает второй фактический крутящий момент Tact2 в качестве окончательного фактического крутящего момента Tact (Tact=Tact2).
[0053] В настоящем варианте осуществления электронный блок 101 управления составляет "блок управления двигателем". В этом случае, расходомер 204 воздуха составляет "первый датчик рабочего состояния", а датчик 205 дроссельной заслонки составляет "второй датчик рабочего состояния".
[0054] Электронный блок 101 управления реализует функционирование в качестве "блока установки целевого крутящего момента" посредством процесса этапа S103 блок-схемы последовательности операций, иллюстрированной на фиг. 2, реализует функционирование в качестве "блока управления крутящим моментом двигателя" посредством процесса этапов S104-S106 блок-схемы последовательности операций, иллюстрированной на фиг. 2, реализует функционирование в качестве "блока установки допустимого крутящего момента" посредством процесса этапа S202 блок-схемы последовательности операций, иллюстрированной на фиг. 3, реализует функционирование в качестве "блока вычисления фактического крутящего момента" посредством процесса этапов S301 и S302 блок-схемы последовательности операций, иллюстрированной на фиг. 4, реализует функционирование в качестве "блока выбора фактического крутящего момента" посредством процесса этапов S303-S305 блок-схемы последовательности операций, иллюстрированной на фиг. 4, реализует функционирование в качестве "блока сравнения крутящего момента" посредством процесса этапа S205 блок-схемы последовательности операций, иллюстрированной на фиг. 3, и реализует функционирование в качестве "блока вывода управляющего сигнала" посредством процесса этапа S107 блок-схемы последовательности операций, иллюстрированной на фиг. 2.
[0055] (Объяснение временной диаграммы)
Фиг. 6 является схемой, объясняющей работу электронного блока 101 управления, относящуюся к определению ненормального крутящего момента.
[0056] Электронный блок 101 управления вычисляет целевой крутящий момент Ttrg двигателя 1 на основе величины APO задействования педали акселератора и скорости Ne вращения двигателя и управляет операциями электронно-управляемого устройства 41 дроссельной заслонки и клапана 6 впрыска топлива так, чтобы реализовывать целевой крутящий момент Ttrg. Следовательно, если эти части управления двигателем нормально работают, и, таким образом, управление двигателем нормально выполняется, крутящий момент TRQ двигателя изменяется, чтобы следовать целевому крутящему моменту Ttrg (иллюстрирован штрих-двухпунктирной линией).
[0057] При этом, для мониторинга крутящего момента двигателя, электронный блок управления устанавливает допустимый крутящий момент Tlmt (иллюстрированный пунктирной линией) больше целевого крутящего момента Ttrg и вычисляет крутящий момент, фактически формируемый двигателем 1, как фактический крутящий момент Tact. Когда фактический крутящий момент Tact, превышающий допустимый крутящий момент Tlmt, вычисляется, электронный блок управления определяет, что управление двигателем имеет некоторые нарушения, и ограничивает приведение в действие двигателя 1. Например, когда работа электронно-управляемого устройства 41 дроссельной заслонки имеет нарушение, и, таким образом, электронно-управляемое устройство 41 дроссельной заслонки открывается больше целевого открытия TVO_t дроссельной заслонки, электронный блок управления может обнаруживать нарушение, возникающее в электронно-управляемом устройстве 41 дроссельной заслонки, и ограничивать приведение в действие двигателя 1, поскольку фактический крутящий момент Tact превышает допустимый крутящий момент Tlmt.
[0058] Однако, когда нарушение также возникает в процессе вычисления фактического крутящего момента Tact в дополнение к неисправности электронно-управляемого устройства 41 дроссельной заслонки, электронный блок управления не может обнаруживать возникновение нарушения в электронно-управляемом устройстве 41 дроссельной заслонки посредством вычисления фактического крутящего момента Tact, имеющего значение, меньшее, чем первоначальное значение, и поддержания фактического крутящего момента в значении, меньшем, чем допустимый крутящий момент Tlmt, даже если крутящий момент двигателя, превышающий допустимый крутящий момент Tlmt, формируется вследствие неисправности электронно-управляемого устройства 41 дроссельной заслонки.
[0059] Например, предположим, что, хотя обнаружение объема Qa всасываемого воздуха выполняется нормально, процесс вычисления фактического крутящего момента Tact на основе объема Qa всасываемого воздуха имеет нарушение, и, таким образом, фактический крутящий момент Tact вычисляется как значение, меньшее, чем исходное значение. В таком случае, даже если электронно-управляемое устройство 41 дроссельной заслонки открывается в большей мере, чем целевое открытие TVO_t дроссельной заслонки, и крутящий момент двигателя, превышающий допустимый крутящий момент Tlmt, формируется, нарушение, возникающее в электронно-управляемом устройстве 41 дроссельной заслонки, не может быть обнаружено, поскольку фактический крутящий момент Tact вычисляется как значение, меньшее, чем исходное значение, и фактический крутящий момент поддерживается в значении, меньшем, чем допустимый крутящий момент Tlmt.
[0060] Кроме того, предположим, что процесс вычисления целевого крутящего момента Ttrg, также как процесс вычисления фактического крутящего момента Tact, имеет нарушения, и, таким образом, целевой крутящий момент Ttrg вычисляется как значение, большее, чем исходное значение, по некоторой причине (например, ошибка в вычислении). В таком случае, даже если крутящий момент двигателя, превышающий допустимый крутящий момент Tlmt, формируется в результате управления на основе целевого крутящего момента Ttrg, нарушение (ошибка в вычислении целевого крутящего момента Ttrg) в процессе вычисления целевого крутящего момента Ttrg не может быть обнаружена, поскольку фактический крутящий момент Tact вычисляется как значение, меньшее, чем исходное значение, и сохраняется в значении, меньшем, чем допустимый крутящий момент Tlmt.
[0061] Напротив, в настоящем варианте осуществления, электронный блок управления обнаруживает объем Qa всасываемого воздуха и открытие TVO дроссельной заслонки в качестве параметров рабочего состояния двигателя 1 и вычисляет первый фактический крутящий момент Tact1 на основе объема Qa всасываемого воздуха и вычисляет второй фактический крутящий момент Tact2 на основе открытия TVO дроссельной заслонки (и скорости Ne вращения двигателя). Затем, электронный блок управления выбирает больший момент из первого и второго фактических крутящих моментов Tact1 и Tact2 в качестве окончательного фактического крутящего момента Tact. Затем, когда окончательный фактический крутящий момент Tact превышает допустимый крутящий момент Tlmt, электронный блок управления определяет, что управление двигателем имеет нарушение, и изменяет флаг Ftrq определения ненормальности в единицу, чтобы ограничивать приведение в действие двигателя 1.
[0062] Фиг. 6 иллюстрирует работу электронного блока 101 управления, относящуюся к процессу определения ненормального крутящего момента, когда фактический крутящий момент TRQ двигателя увеличивается с отклонением от целевого крутящего момента Ttrg во время t0 и превышает допустимый крутящий момент Tlmt во время t3. Причина отклонения крутящего момента TRQ двигателя включает в себя ошибку вычисления целевого крутящего момента Ttrg и неисправность электронно-управляемого устройства 41 дроссельной заслонки. Другими словами, ошибка в вычислении целевого крутящего момента Ttrg и неисправность электронно-управляемого устройства 41 дроссельной заслонки являются нарушениями управления двигателем, которые предполагаются в настоящем варианте осуществления.
[0063] Если процесс вычисления первого фактического крутящего момента Tact1 не имеет нарушения, и первый фактический крутящий момент Tact1 нормально вычисляется, первый фактический крутящий момент Tact1 изменяется при разгоне крутящего момента TRQ двигателя и, таким образом, превышает допустимый крутящий момент Tlmt во время t3 аналогично крутящему моменту TRQ двигателя. В результате, нарушение управления двигателем может быть обнаружено. Поскольку объем Qa всасываемого воздуха в качестве основы для вычисления первого фактического крутящего момента Tact1 более точно указывает фактический крутящий момент TRQ двигателя, электронный блок управления может точно улавливать крутящий момент TRQ двигателя с помощью первого фактического крутящего момента Tact1, чтобы точно обнаруживать нарушение. Напротив, когда процесс вычисления первого фактического крутящего момента Tact1 имеет нарушение во время t1, и первый фактический крутящий момент Tact1 вычисляется как значение, меньшее, чем исходное значение (крутящий момент TRQ двигателя), и сохраняется в значении, меньшем, чем допустимый крутящий момент Tlmt, даже после времени t3, электронный блок управления не может обнаруживать нарушение.
[0064] В настоящем варианте осуществления второй фактический крутящий момент Tact2 превышает первый фактический крутящий момент Tact1 во время t2, после того как процесс вычисления первого фактического крутящего момента Tact1 имеет нарушение, и, таким образом, первый фактический крутящий момент Tact1 выбирается в качестве фактического крутящего момента Tact перед временем t2, а второй фактический крутящий момент Tact2 выбирается в качестве фактического крутящего момента Tact после времени t2.
[0065] Как описано выше, поскольку больший момент из первого и второго фактических крутящих моментов Tact1 и Tact2 выбирается в качестве окончательного фактического крутящего момента Tact, второй фактический крутящий момент Tact2 выбирается в качестве фактического крутящего момента Tact после времени t2, в которое второй фактический крутящий момент Tact2 превышает первый фактический крутящий момент Tact1.
[0066] Второй фактический крутящий момент Tact2 вычисляется из открытия TVO дроссельной заслонки, которое является параметром рабочего состояния, отличным от объема Qa всасываемого воздуха. В примере, иллюстрированном на фиг. 6, второй фактический крутящий момент Tact2 будет превышать допустимый крутящий момент Tlmt во время t4, после того как второй фактический крутящий момент Tact2 выбирается в качестве окончательного фактического крутящего момента Tact. Следовательно, в настоящем варианте осуществления, даже если процесс вычисления первого фактического крутящего момента Tact1 имеет нарушение, и, таким образом, крутящий момент двигателя не может точно наблюдаться с помощью первого фактического крутящего момента Tact1, электронный блок управления может обнаруживать увеличение в крутящем моменте двигателя, превышающее допустимый крутящий момент Tlmt, с помощью второго фактического крутящего момента Tact2, чтобы обнаруживать нарушение управления двигателем.
[0067] (Объяснение результатов)
Вышеописанное является содержимым управления двигателем. Далее в данном документе резюмируются результаты, полученные посредством настоящего варианта осуществления.
[0068] В настоящем варианте осуществления, во время установки целевого крутящего момента Ttrg двигателя 1 и управления крутящим моментом двигателя на основе целевого крутящего момента Ttrg, электронный блок управления обнаруживает множество различающихся параметров рабочего состояния (объем Qa всасываемого воздуха и открытие TVO дроссельной заслонки) в качестве указателей для указания фактического рабочего состояния двигателя 1 и выбирает наибольшее значение среди фактических крутящих моментов Tact1 и Tact2, индивидуально вычисленных из множества параметров рабочего состояния, в качестве окончательного фактического крутящего момента Tact. Затем, для мониторинга крутящего момента двигателя, электронный блок управления устанавливает допустимый крутящий момент Tlmt, больший, чем целевой крутящий момент Ttrg, сравнивает фактический крутящий момент Tact с допустимым крутящим моментом Tlmt и ограничивает приведение в действие двигателя 1, когда фактический крутящий момент Tact превышает допустимый крутящий момент Tlmt.
[0069] Как описано выше, поскольку наибольшее значение среди фактических крутящих моментов, индивидуально вычисленных из множества различающихся параметров рабочего состояния, выбирается в качестве окончательного фактического крутящего момента Tact, даже если какой-либо момент из первого и второго фактических крутящих моментов Tact1 и Tact2 вычисляется как значение, меньшее, чем исходное значение, вследствие нарушения, возникающего в процессе вычисления фактического крутящего момента, электронный блок управления может улавливать точный крутящий момент двигателя и соответственно ограничивать приведение в действие двигателя 1 посредством выбора другого из фактических крутящих моментов в качестве окончательного фактического крутящего момента.
[0070] Кроме того, в настоящем варианте осуществления, целевой крутящий момент Ttrg и допустимый крутящий момент Tlmt устанавливаются посредством отдельных вычислений на основе величины APO задействования педали акселератора. Следовательно, когда крутящий момент двигателя увеличивается вследствие нарушения, возникающего в процессе вычисления целевого крутящего момента Ttrg, электронный блок управления может обнаруживать это нарушение.
[0071] Например, когда целевое открытие TVO_t дроссельной заслонки устанавливается в значение, большее, чем исходное значение, и электронно-управляемое устройство 41 дроссельной заслонки открывается больше, чем первоначально, вследствие нарушения, возникающего в процессе вычисления целевого крутящего момента Ttrg, возможно предотвращать невыявление нарушения, когда фактический крутящий момент Tact будет сохраняться в значении, меньшем, чем допустимый крутящий момент Tlmt, даже если крутящий момент двигателя, превышающий допустимый крутящий момент Tlmt, формируется, поскольку фактический крутящий момент Tact вычисляется как значение, меньшее, чем исходное значение.
[0072] Кроме того, двигатель 1 может избегать продолжения формирования чрезмерного крутящего момента посредством ограничения приведения в действие двигателя 1 в ответ на обнаружение нарушения.
[0073] (Объяснение других вариантов осуществления)
В варианте осуществления, описанном выше, допустимый крутящий момент Tlmt, используемый для мониторинга крутящего момента двигателя, устанавливается посредством индивидуального вычисления из целевого крутящего момента Ttrg на основе величины APO задействования педали акселератора. Однако, вариант осуществления не ограничен этим. Допустимый крутящий момент Tlmt может быть вычислен на основе целевого крутящего момента Ttrg.
[0074] В качестве управления в этом случае фиг. 7 иллюстрирует последовательность операций основной процедуры управления двигателем согласно другому варианту осуществления настоящего изобретения. Электронный блок 101 управления выполняет процедуру управления, иллюстрированную на фиг. 7, в каждое предварительно определенное время после завершения прогрева двигателя 1.
[0075] В данном документе только отличие от процедуры управления, иллюстрированной на фиг. 3, будет объяснено. На этапе S401 электронный блок управления считывает целевой крутящий момент Ttrg.
[0076] На этапе S402 электронный блок управления вычисляет допустимый крутящий момент Tlmt на основе целевого крутящего момента Ttrg. В настоящем варианте осуществления допустимый крутящий момент Tlmt устанавливается в значение, полученное добавлением предварительно определенного крутящего момента ΔT к целевому крутящему моменту Ttrg (Tlmt=Ttrg+ΔT).
[0077] Допустимый крутящий момент Tlmt не ограничивается добавлением предварительно определенного крутящего момента ΔT к целевому крутящему моменту Ttrg и может также быть вычислен умножением предварительно определенного значения β больше единицы на целевой крутящий момент Ttrg (Tlmt=Ttrg×β).
[0078] Как описано выше, установка допустимого крутящего момента Tlmt может быть более просто выполнена посредством установки допустимого крутящего момента Tlmt в значение, полученное добавлением предварительно определенного крутящего момента ΔT или умножением предварительно определенного значения β к или на целевой крутящий момент Ttrg.
[0079] Процесс, выполненный на этапах S203-S209, является таким же, что и этап, выполненный на этапах S203-S209 блок-схемы последовательности операций, иллюстрированной на фиг. 3.
[0080] В вышеприведенном объяснении было объяснено, что приведение в действие двигателя 1 ограничивается, когда фактический крутящий момент Tact превышает допустимый крутящий момент Tlmt. Однако, в дополнение или вместо такого ограничения электронный блок управления может записывать возникновение нарушения в управлении двигателем или сообщать об этом нарушении водителю. Например, посредством сохранения специальной области в запоминающем устройстве электронного блока 101 управления, когда флаг Ftrq определения неисправности изменяется в единицу в результате процесса определения ненормального крутящего момента, электронный блок управления записывает результат определения в специальной области хранения. Кроме того, уведомление водителю может быть выполнено посредством тревожного сигнала, предупреждающего светового сигнала и т.д. Сигнал, выводимый из электронного блока 101 управления к тревожной сигнализации, предупредительной световой сигнализации и т.д., соответствует "управляющему сигналу", который формируется, чтобы сообщать о возникновении ненормального состояния водителю. Соответствующее техническое обслуживание и управление двигателем 1 могут быть стимулированы посредством побуждения водителя распознавать нарушение.
[0081] Параметры рабочего состояния, используемые для вычисления фактического крутящего момента Tact, не ограничиваются объемом Qa всасываемого воздуха и открытием TVO дроссельной заслонки, и, таким образом, могут быть любым параметром, имеющим характеристики корреляции. Например, давление на впуске может быть использовано в качестве первого параметра рабочего состояния, а открытие дросселя может быть использовано в качестве второго параметра рабочего состояния посредством использования датчика давления на впуске в качестве первого датчика рабочего состояния и использования датчика дроссельной заслонки в качестве второго датчика рабочего состояния.
[0082] Кроме того, в вышеприведенном объяснении, ошибка в вычислении фактического крутящего момента была иллюстрирована в качестве причины того, что фактический крутящий момент Tact (первый фактический крутящий момент Tact1) вычисляется как значение, меньшее, чем исходное значение, другими словами, в качестве нарушения в процессе вычисления фактического крутящего момента. Однако, вариант осуществления не ограничен этим. Например, аналогичное управление может быть применено, даже когда объем Qa всасываемого воздуха ошибочно обнаруживается вследствие неисправности расходомера 204 воздуха. Более конкретно, когда первый фактический крутящий момент Tact1 вычисляется как значение, меньшее, чем исходное значение, вследствие ложного обнаружения объема Qa всасываемого воздуха, второй фактический крутящий момент Tact2 превышает первый фактический крутящий момент Tact1. Следовательно, электронный блок управления наблюдает крутящий момент двигателя с помощью второго фактического крутящего момента Tact2 и ограничивает приведение его в действия, когда определяется, что двигатель 1 формирует чрезмерно большой крутящий момент.
[0083] Как описано выше, варианты осуществления настоящего изобретения были объяснены, но варианты осуществления являются лишь частью примера применения настоящего изобретения и не предназначены, чтобы ограничивать технические рамки настоящего изобретения конкретной конфигурацией вышеописанных вариантов осуществления.
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента

