Результат интеллектуальной деятельности: Способ динамичной высокоточной ориентации и стабилизации космического аппарата
Вид РИД
Изобретение
Назначение
Изобретение относится к космической технике в области динамичного управления ориентацией космического аппарата (КА) для дистанционного зондирования Земли с широким диапазоном линейного разрешения.
Уровень техники
Космические аппараты для дистанционного зондирования Земли используются для решения следующих задач:
- контроль чрезвычайных ситуаций (наблюдение районов чрезвычайных ситуаций с целью оценки последствий стихийных бедствий, аварий, катастроф и планирования мероприятий по их ликвидации, контроль возникновения и последствий лесных пожаров);
- экологический контроль, охрана окружающей среды;
- информационное обеспечение рационального природопользования и хозяйственной деятельности.
Наиболее высокие требования по разрешающей способности, а именно, с диапазоном линейного разрешения менее 1 м (подкласс ДЗЗ - сверхвысокодетальный), выдвигаются со стороны задач контроля чрезвычайных ситуаций и экологического состояния окружающей среды (см. В.И. Куренков М.Ю. Гоголев. Методы исследования эффективности ракетно-космической техники. Самара 2012 г., стр. 11, 19), при этом должны обеспечиваться высокая точность ориентации и маневренность (скорость перенацеливания съемочной аппаратуры КА ДЗЗ) вращательного движения КА вокруг центра масс по рысканью, крену и тангажу.
Наряду с высокой точностью исполнительных органов, формирующих механическое воздействие на корпус КА, в системе ориентации КА необходимо обеспечить высокую точность определения положения КА в пространстве. Известные способы определения положения КА в пространстве основаны на проведении измерений относительно небесных светил (Солнца, Земли, звезд), предусматривают использование солнечных датчиков, датчиков ИК-вертикали, магнитометров, звездных датчиков (ЗД) и т.д. Предпочтение по точности отдается звездным датчикам (см. Алексеев К.Б., Бебенин Г.Г. Управление космическими летательными аппаратами. М.: Машиностроение, 1974).
Анализируя альтернативные варианты исполнительных органов, рассмотрим наиболее известную систему с газореактивными соплами или микрореактивными двигателями. Эти исполнительные органы, отбрасывая холодный или горячий газ через сопло в космическое пространство, создают силу, воздействующую на корпус КА, а поскольку запасы рабочего газа ограничены и не восполняются, то использование данной системы для длительного полета КА нецелесообразно.
Системам, использующим гравитационные поля, аэродинамическое давление, силы солнечной радиации, характерна лишь функция стабилизации КА в одном базовом положении: по местной вертикали - у гравитационных систем; в направлении вектора скорости полета - у аэродинамических систем и, наконец, в направлении на Солнце - у систем с «солнечными парусами». Эти системы, хотя и обладают принципиальной возможностью выполнения иных функций (предварительного успокоения, пространственных разворотов и т.д.), тем не менее, никогда для этого не используются в виду явной нецелесообразности из-за чрезмерного их усложнения (см. Гущин В.Н. Системы ориентации и стабилизации//Основы устройства космических аппаратов: Учебник для вузов. - М.: Машиностроение, 2003. - С. 241-257. - 272 с).
В настоящее время широкое распространение получили системы ориентации с использованием двигателей-маховиков и силовых гироскопов - гиродинов (см. В.Н. Васильев. Системы ориентации космических аппаратов, М., 2009, с. 58-60), которые являются одной из основных бортовых систем КА, обеспечивающих определенное положение корпуса КА в пространстве. Двигатели-маховики или гиродины устанавливаются на корпусе КА и являются исполнительными органами, обеспечивающими вращательное движение КА вокруг центра масс по рысканью, крену и тангажу (см., например, А.Г. Иосифьян, Электромеханика в космосе. «Космонавтика, астрономия» №3, 1977 г, стр. 20).
Принцип работы этих инерционных устройств основан на законе сохранения суммарного кинетического момента «КА - исполнительные органы». Например, когда исполнительный орган раскручивается в одну сторону, то КА, соответственно, начинает крутиться в другую сторону. Если под влиянием внешних факторов КА начал разворачиваться в определенном направлении, достаточно увеличить скорость вращения маховика в ту же сторону, чтобы он скомпенсировал момент («принял вращение на себя»), и нежелательный поворот КА прекратится.
В отличие от двигателей-маховиков гиродины имеют более сложную конструкцию и систему управления, имеют большие размеры и массу, требуют длительной и плавной раскрутки ротора. Они применяются тогда, когда необходим большой управляющий момент, и используются в основных режимах ориентации КА:
- поиск ориентиров;
- стабилизация в заданной базовой системе координат;
программные развороты.
В настоящее время гиродины являются основными исполнительными органами систем ориентации современных высокоманевренных космических аппаратов с длительным сроком активного существования (см. статью размещенную в интернете Акашев Д.И., Якимовский Д.О., Яковец О.Б. Силовые гироскопические комплексы для малых космических аппаратов. ФГУП «НИИ командных приборов»).
Наиболее широкое распространение получили гиродины, обладающие двумя степенями свободы относительно корпуса КА. Одна из них связана с вращением маховика (ротора гиродина) с постоянной скоростью вокруг оси (например, в исходном номинальном положении вокруг оси OY), установленного в гироузле (например, в рамке), и создающего вектор кинетического момента Н по данной оси, а другая - с поворотом оси вращения ротора гиродина под воздействием некоторого устройства (привода), создающего вращающий момент m, т.е. с поворотом гироузла с угловой скоростью  вокруг оси OZ (оси прецессии), перпендикулярной к первой. В результате через конструкцию крепления гиродина на корпус КА в начальный момент передается управляющий момент М вокруг третьей оси (оси ОХ), равный
вокруг оси OZ (оси прецессии), перпендикулярной к первой. В результате через конструкцию крепления гиродина на корпус КА в начальный момент передается управляющий момент М вокруг третьей оси (оси ОХ), равный

(см. Б.В. Раушенбах, Е.Н. Токарь. Управление ориентацией космических аппаратов. Ориентация искусственных спутников в гравитационных и магнитных полях. «Наука», М, 1974. стр. 130-131).
Данное управление вращением КА вокруг оси OXs в связанной системе координат принимаем за управление КА по крену и величины управляющих моментов гиродина по осям описываются следующим выражением:

где m - величина вращающего момент вокруг оси прецессии (ось OZs),
Н - величина кинетического момента гироскопа (ось OYs),
 - угол отклонения вектора Н от исходного номинального положения,
- угол отклонения вектора Н от исходного номинального положения,
- угловая скорость поворота гироузла.
(см. Петрищев В.Ф. Элементы теории гироскопа и его применение для управления космическими аппаратами: Учебное пособие. Самарский государственный аэрокосмический университет. Самара, 2004. с. 59-61).
Аналогично, выражению управления КА по крену, величины управляющих моментов по рысканью и тангажу относительно исходного номинального положения описываются следующими выражениями:
- величины управляющих моментов по осям гиродина по рысканью:

где m - величина вращающего момент вокруг оси прецессии (ось OXs),
Н - величина кинетического момента гироскопа (ось OZs),
- угол отклонения вектора Н от исходного номинального положения,
 - угловая скорость поворота гироузла;
- угловая скорость поворота гироузла;
- величины управляющих моментов по осям гиродина по тангажу:

где m - величина вращающего момент вокруг оси прецессии (ось OYs),
Н - величина кинетического момента гироскопа (ось OXs),
- угол отклонения вектора Н от исходного номинального положения,
 - угловая скорость поворота гироузла.
- угловая скорость поворота гироузла.
На практике для обеспечения высокой надежности КА используют избыточную систему гиродинов, в которой число гиродинов больше трех (см. В.Н. Васильев. Системы ориентации космических аппаратов, М., 2009, с. 184-188). При этом наибольший интерес представляют системы из четырех гиродинов, обладающих минимальной избыточностью, т.е. минимальной массой и в то же время сохраняющих работоспособность при отказе одного гиродина, повышая, тем самым, надежность КА.
Практическая реализация избыточной системы гиродинов связана с необходимостью обеспечения закона управления гиродинами. Управление системой гиродинов осуществляется от микро ЭВМ и следует отметить, что при использовании компланарной и тетраэдрной конфигурации минимально избыточной системы, время переориентации для компланарной схемы вдвое меньше, чем для тетраэдрной схемы. Это объясняется тем, что для компланарной схемы алгоритмы управления гиродинами являются более простыми и одновременно более эффективными вследствие простой геометрической организации системы, допускающей наглядную интерпретацию поведения коллинеарных пар гиродинов в ходе управления (см. Л. В. Шипулина, О. А. Татаринова, Ю. Н. Корытко. Управление переориентацией космического аппарата с ограничением на ориентацию. В1 сник НТУ «ХП1». Cepia: Системний аналiз, управлiння та iнформацiйнi  - X.: НТУ «ХП1», 2013. - №62 (1035). - С. 48-52.).
- X.: НТУ «ХП1», 2013. - №62 (1035). - С. 48-52.).
Наиболее близким к предлагаемому изобретению является способ возможности влияния линейного привода вращения рамки гиродина на улучшение качества управления КА (Зуев И.Н., Бутаков А.Н. Возможности влияния линейного привода вращения рамки гиродина на улучшение качества управления КА. ОАО «НПЦ «Полюс», 634050, Россия, г. Томск, пр. Кирова, 56 «в». XIV Международная научно-практическая конференция «Современные техника и технологии»), взятое за прототип.
Сущность работы прототипа заключается в том, что в качестве электромеханического исполнительного органа системы ориентации и стабилизации КА используется силовое гироскопическое устройство - гиродин. Рассматривается способ, позволяющий увеличить точность ориентации (стабилизации) КА путем соответствующего управления гиродином, который конструктивно выполнен в виде моноблока, имеющем в своем составе двигатель-маховик (ДМ), помещенный в гироузел, привод вращения которого состоит из двигателя и редуктора, датчика угла поворота и электронного формирователя управляющих сигналов. Гиродин обладает двумя степенями свободы относительно корпуса КА. Одна из них связана с вращением маховика ДМ с постоянной скоростью (силовой гироскоп) вокруг данной оси гироскопа, а другая - с вращением гироузла двигателем через редуктор вокруг оси прецессии, которая перпендикулярна оси гироскопа, т.е. с поворотом оси вращения гироскопа вокруг оси прецессии. Выходным параметром гиродина является управляющий момент М в соответствии с выражением (1). Радикальным способом повышения точности стабилизации КА в прототипе является замена шагового привода вращения гироузла на линейный привод с большой кратностью регулирования. Наличие двигателя и редуктора в приводе гироузла позволяет получить низкую скорость вращения гироузла, обеспечивая тем самым высокую точность стабилизации КА, однако при перенацеливании КА на объект наличие редуктора снижает скорость двигателя, обеспечивающего вращение гироузла, и увеличивает время перенацеливания КА, т.е. снижает динамику движения (маневренность) КА.
Целью предлагаемого способа динамичной высокоточной ориентации и стабилизации космического аппарата является повышение динамики движения КА при высокой точности стабилизации.
Раскрытие изобретения
Поставленная цель достигается благодаря обеспечению управления вращением гироузла в режиме точной стабилизации - от двигателя через редуктор, или в динамичном режиме - от двигателя напрямую. Двигатель с редуктором, для обеспечения высокой точности стабилизации КА, может применяться в высокоточном прецизионном исполнении с малыми массой и габаритами, т.к. при стабилизации КА требуется снижение управляющего момента гиродина на КА и, в соответствии с выражением (1), достигается низкой скоростью вращения гироузла гиродина.
Двигатель, управляющий вращением гироузла напрямую (т.е. без редуктора, снижающего его выходную скорость), обеспечивает высокую скорость вращения гироузла гиродина, который создает большой управляющий момент на КА и, тем самым, обеспечивает высокую динамику КА поиска ориентиров.
Способ динамичной высокоточной ориентации и стабилизации космического аппарата заключается в обеспечении поворота КА на заданные углы по крену, рысканью и тангажу посредством исполнительных органов - гиродинов, содержащих двигатели-маховики, помещенные в гироузлы, имеющие возможность управляемого контролируемого вращения. При этом ротор каждого двигателя-маховика раскручивают до заданной максимальной постоянной скорости, получая в результате гироскоп. Двигателем через редуктор обеспечивают вращение каждого гироузла вокруг своей оси прецессии, перпендикулярной оси гироскопа. Тем самым создают управляющие механические моменты гиродинов по связанным осям КА и стабилизацию положения КА. По достижении стабилизации КА, по каждой оси прецессии вводят в действие второй двигатель - безредукторный, расположенный на одной оси с редуктором первого двигателя, и синхронизируют угловую скорость безредукторного двигателя с угловой скоростью выходного вала редуктора. После этого отсоединяют редуктор от гироузла, подсоединяют к нему вал безредукторного двигателя и продолжают управление космическим аппаратом в высокодинамичном режиме, обеспечивающим поворот КА на заданные углы по крену, рысканью и тангажу.
Способ динамичной высокоточной ориентации и стабилизации космического аппарата может быть реализован следующими последовательными операциями:
1) Подают команды управления микро ЭВМ формирователя сигналов управления по крену, рысканью и тангажу в электронный формирователь управляющих сигналов (ФУС) гиродинов (каждый гиродин содержит двигатель-маховик, помещенный в гироузел; привод вращения гироузла, состоящий из первого двигателя с редуктором; датчик угла поворота гироузла).
2) Плавно раскручивают по сигналу ФУС двигателем-маховиком ротор гиродина вокруг оси гироскопа до заданной максимальной постоянной скорости, получая в результате гироскоп.
3) Первым двигателем по сигналу ФУС через редуктор обеспечивают вращение гироузла вокруг оси прецессии, перпендикулярной оси гироскопа, создавая, тем самым, управляющие механические моменты гиродинов по связанным осям КА, обеспечивая этим высокую точность стабилизации КА.
4) По получении стабилизации раскручивают по сигналу ФУС второй двигатель вокруг оси прецессии, расположенный по одной оси прецессии с первым двигателем и редуктором. Синхронизируют угловую скорость выходного вала редуктора с угловой скоростью вала второго двигателя.
5) Разъединяют по сигналу ФУС первое разъединительно-соединительного устройство, соединяющее выход редуктора с гироузлом и соединяют по сигналу ФУС второе разъединительно-соединительное устройство, соединяющее вал второго двигателя с гироузлом.
6) Управляют вторым двигателем по сигналу ФУС вращением вокруг оси прецессии гироузла, создавая, тем самым, управляющие механические моменты гиродинов по связанным осям КА и обеспечивая высокую динамику ориентации КА при повороте на заданные углы по крену, рысканью и тангажу.
7) Синхронизируют перед началом стабилизации КА угловую скорость выходного вала редуктора с угловой скоростью вала второго двигателя.
8) Разъединяют по сигналу ФУС второе разъединительно-соединительное устройство и соединяют по сигналу ФУС первое разъединительно-соединительное устройство, соединяющее выходной вал редуктора с гироузлом, для обеспечения высокой точности ориентации КА.
Графические иллюстрации
Изобретение проиллюстрировано графическими фигурами Фиг. 1 и Фиг. 2.
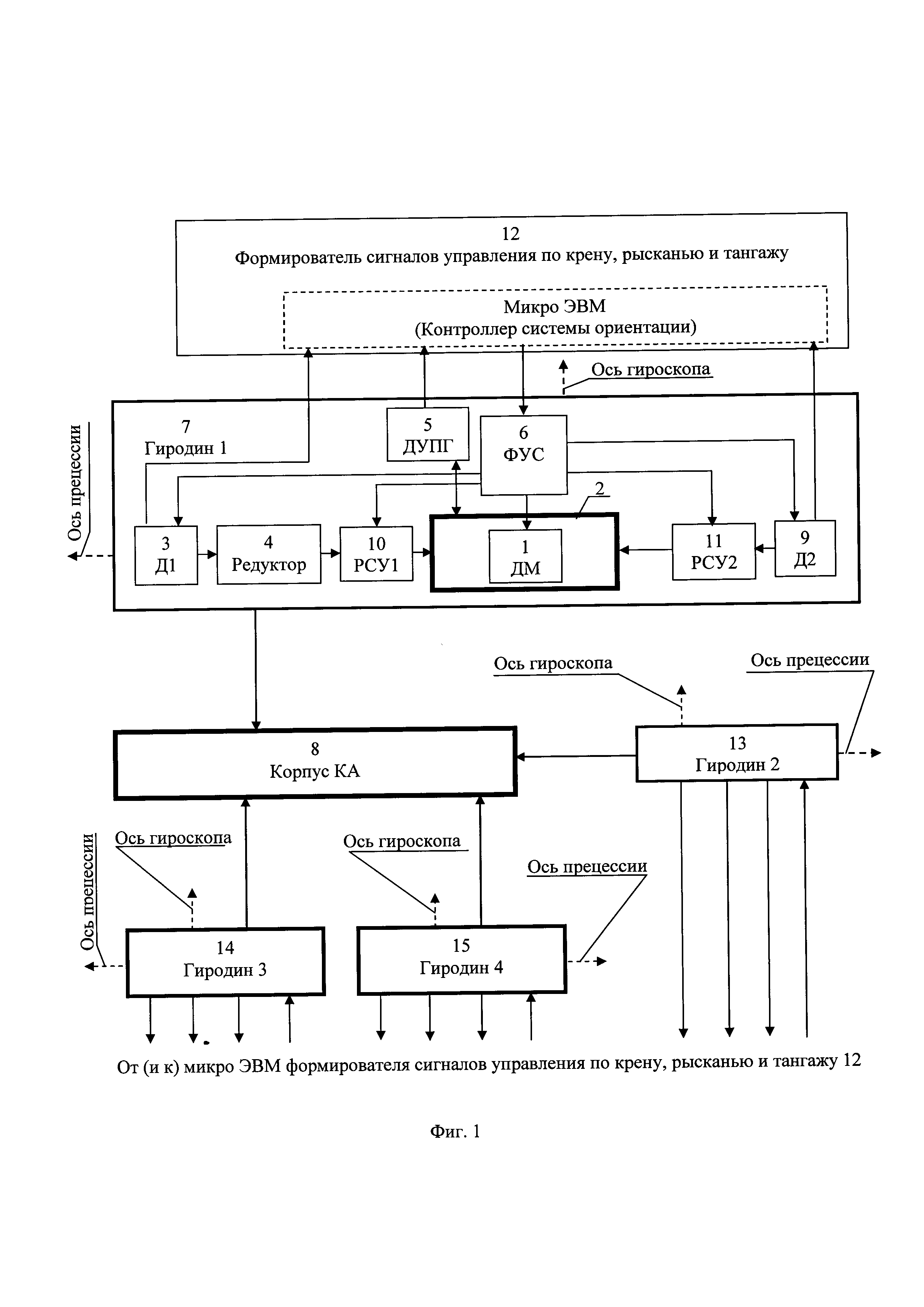
На приведенной графической фиг.1 приведен пример структурной схемы для реализации заявляемого способа динамичной высокоточной ориентации и стабилизации космического аппарата, в которой используется избыточная система из четырех гиродинов, и содержащей составляющие, обозначенные позициями:
- ДМ - двигатель-маховик -1;
- Гироузел (например, одностепенный подвес рамки) -2;
- Д1 - первый двигатель - 3;
- Редуктор - 4;
- ДУПГ (датчик угла поворота гироузла) -5;
- ФУС (электронный формирователь управляющих сигналов) - 6;
- Гиродин 1-7;
- Корпус космического аппарата -8;
- Д2 - второй двигатель - 9;
- РСУ1 (первое разъединительно-соединительное устройство) - 10;
- РСУ2 (второе разъединительно-соединительное устройство) - 11;
- Формирователь сигналов управления по крену, рысканью и тангажу, имеющий в своем составе микро ЭВМ (контроллер системы ориентации) -12;
- Гиродин 2-13;
- Гиродин 3-14;
- Гиродин 4-15.
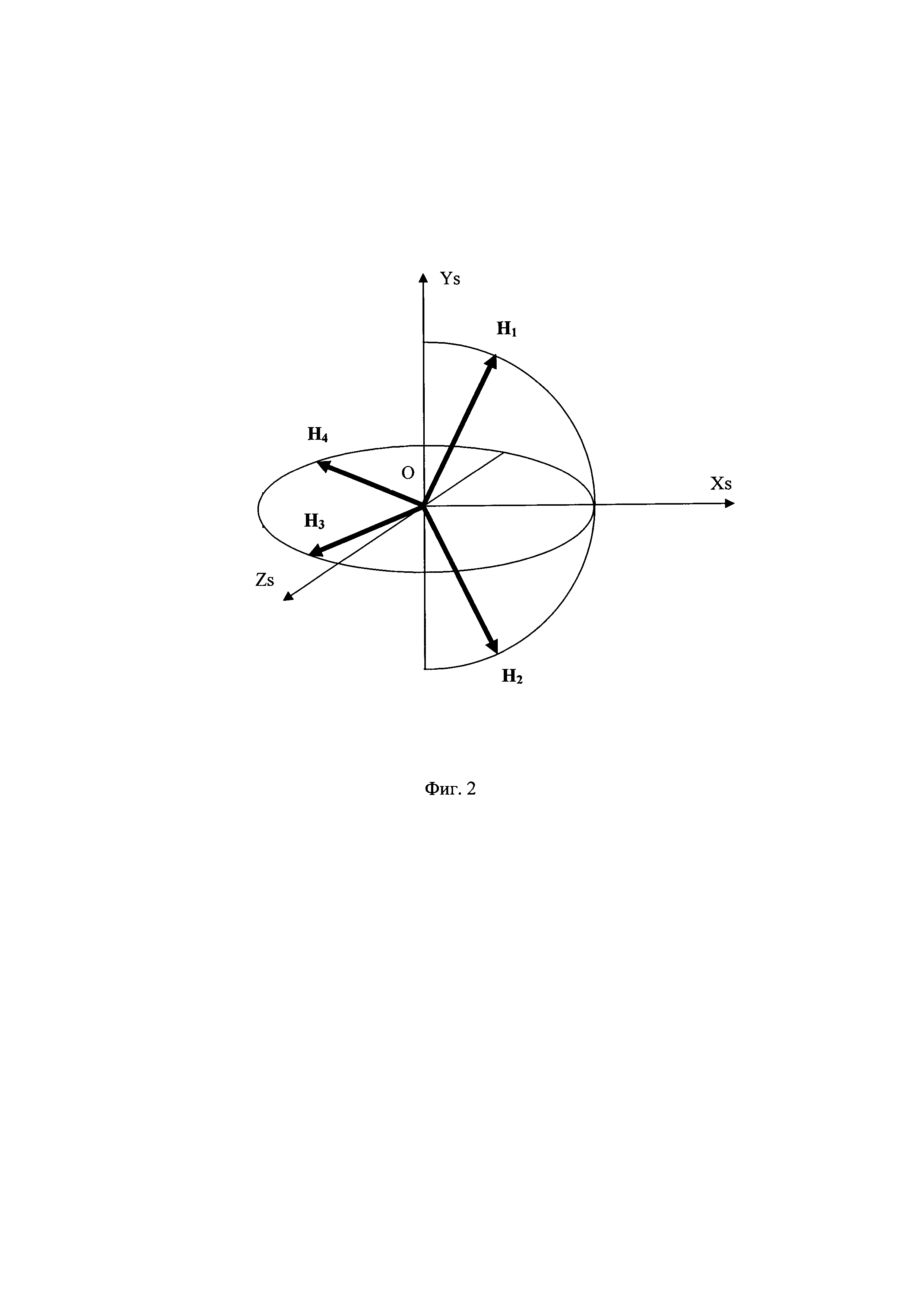
На приведенной графической фиг. 2 расположение четырех гиродинов избыточной системы (примера структурной схемы) представлено в виде двух типовых групп гиродинов с параллельными осями прецессии, при этом начала всех кинетических моментов гироскопов Hi приведены в общую точку О (см. В.Н. Васильев. Системы ориентации космических аппаратов, М., 2009, с. 184-188). Векторы кинетических моментов гироскопов (H1, Н2) первой группы гиродинов вращаются в координатной плоскости OXY, а второй (Н3, Н4) - в координатной плоскости OXZ.
Пример реализации способа
После отделения КА от ракеты или разгонного блока, процесс приведения и последующая стабилизация КА в орбитальной системе координат OXoYoZo, определение в связанной системе координат КА OXsYsZs углов:
- крен - вращение вокруг оси OXs;
- рыскание - вращение вокруг оси OYs;
- тангаж - вращение вокруг оси OZs
описаны в патенте, РФ №2618664, и осуществляется по сигналам микро ЭВМ формирователя сигналов управления по крену, рысканью и тангажу 12. В качестве микро ЭВМ можно использовать, например, отечественные однокристальные микро ЭВМ серии 1816, которые включают в себя следующие неотъемлемые элементы: микропроцессор, ОЗУ, ПЗУ, устройства ввода и вывода данных (см. патент, РФ, N 2571728).
На современных КА для ДЗЗ в формирователь сигналов управления по крену, рысканью и тангажу 12, как правило, также входит бесплатформенная система ориентации и блок звездных датчиков, которые являются наиболее точными, в виду того, что звезды считаются бесконечно удаленными объектами, положение которых в инерциальной системе координат не меняются. Описание приведено в патенте, РФ, 2517018.
На фиг. 1 представлена система из четырех гиродинов 17, 13, 14, 15, обладающая минимальной избыточностью и достаточно высокой надежностью и как было отмечено в описании заявки выше, при использовании компланарной и тетраэдрной конфигурации минимально избыточной системы, время переориентации для компланарной схемы вдвое меньше, чем для тетраэдрной схемы, поэтому в примере рассматривается перспективная гиросиловая система ориентации КА, в состав которой входят две ортогонально расположенные группы гиродинов по два одинаковых гиродина с параллельными осями (одна группа гиродины 7, 13, а вторая - гиродины 14, 15), векторы кинетических моментов гироскопов которых графически представлены на фиг. 2.
В виду того, что в примере на фиг. 1 используются одинаковые гиродины, то рассматривается работа одного гиродина 7, а остальные гиродины 13, 14, 15 работают аналогично.
По команде микро ЭВМ формирователя сигналов управления по крену, рысканью и тангажу 12, поступающему в ФУС 6, выходным сигналом ФУС 6 двигатель-маховик 1 плавно раскручивается до заданного максимального значения, и представляет собой гироскоп, крутящийся с постоянной скоростью вокруг оси гироскопа, и создающий вектор кинетического момента H1 по данной оси. Вращающийся гироскоп устанавливается внутри гироузла 2, который имеет возможность под воздействием вращающего момента m поворачиваться вокруг оси прецессии (ось OZs), всегда перпендикулярной вектору Hi (оси гироскопа). Гироузел 2 установлен на корпусе КА таким образом, что при повороте гироузла 2 с угловой скоростью  (темп нарастания
(темп нарастания  определяется величиной m) угол между вектором H1 и осью OYs изменяется и на корпус КА 8 через конструкцию крепления гироузла 2 передаются управляющие механические моменты MOXs, MOYs, MOZs в соответствии с выражением (2), позволяющие обеспечить поворот КА на заданные углы, контролируемые ДУПГ 5.
определяется величиной m) угол между вектором H1 и осью OYs изменяется и на корпус КА 8 через конструкцию крепления гироузла 2 передаются управляющие механические моменты MOXs, MOYs, MOZs в соответствии с выражением (2), позволяющие обеспечить поворот КА на заданные углы, контролируемые ДУПГ 5.
Таким образом, с учетом того, что положение вектора управляющего момента M1 меняется и зависит от угла отклонения вектора H1 от исходного номинального положения , то как результат проектирования вектора M1 на оси OXs и OYs по данным осям, в соответствии с выражением (2), создаются силовые управляющие моменты MOXs (по крену) и MOYs (по рысканью), пропорциональные соответственно косинусу и синусу угла Т.е. при изменении угла от исходного номинального положения до 90° модуль управляющего момента MOXs (по крену) изменяется от максимального  до нулевого значения.
до нулевого значения.
С течением определенного времени корпус приобретает некоторую «паразитную» угловую скорость вокруг оси, направление которой определяется направлением суммарного возмущающего момента в виде кинетического момента. Поэтому требуется включение второго контура системы исполнительных органов (см. Б.В. Раушенбах, Е.Н. Токарь. Управление ориентацией космических аппаратов. Ориентация искусственных спутников в гравитационных и магнитных полях. «Наука», М., 1974. стр. 132) для периодической разгрузки накапливаемой постоянной составляющей (компенсации некоторого постоянного внешнего воздействия). Второй контур системы исполнительных органов может быть выполнен, например, в виде магнитной системы сброса кинетического момента (см. патент. РФ, 2625687) и входит (на фиг.1) в формирователь сигналов управления по крену, рысканью и тангажу 12.
Значение угла отклонения вектора H1 от исходного номинального положения задает микро ЭВМ формирователя сигналов управления по крену, рысканью и тангажу 12 и обеспечивается приводом гироузла 2, состоящего из первого двигателя Д1 3, на валу которого установлен редуктор 4, выходной вал которого через первое разъединительно-соединительное устройство РСУ1 10 в режиме соединения подсоединен к гироузлу 2. Важно отметить, что угловая скорость поворота гироузла не зависит от кинетического момента H1 и при незначительной величине момента m, определяемого темп нарастания
не зависит от кинетического момента H1 и при незначительной величине момента m, определяемого темп нарастания  можно получить в соответствии с выражением (1) большие моменты М за счет увеличения кинетического момента гироскопа Н1
можно получить в соответствии с выражением (1) большие моменты М за счет увеличения кинетического момента гироскопа Н1
Первый двигатель Д1 3 и первое РСУ1 10 управляются сигналами ФУС 6 по командам микро ЭВМ формирователя сигналов управления по крену, рысканью и тангажу 12. В качестве разъединительно-соединительного устройства можно использовать, например, управляемую муфту, снабженную специальным соединительным элементом, который обеспечивает управление соединением и разъединением валов (см. ГОСТ Р 50371-92. Муфты механические общемашиностроительного применения.)
Известно, что у редуктора в зависимости от передаточного числа (отношения скорости вращения вала на входе к скорости вращения вала на выходе) его КПД, равный отношению механической выходной мощности к входной мощности, может изменяться, однако для выбранного постоянного значения передаточного числа редуктора он является величиной постоянной (см. ГОСТ Р 50891-96, разработанный Всероссийским научно-исследовательским институтом стандартизации и сертификации в машиностроении). Благодаря использованию редуктора 4, у которого низкая скорость вращения вала на выходе, можно достигать низкую скорость поворота гироузла 2, в результате чего снижается управляющий момент гиродина1 7 на КА, и, тем самым, обеспечивается высокая точность стабилизации (наведения на цель) КА. Однако, низкая скорость поворота гироузла 2 ухудшает динамику переориентации (скорость поиска ориентиров низкая) КА. Для устранения этого недостатка в режиме переориентации и достижения высокой динамики в приводе гироузла 2 второй двигатель Д2 9 соединяется с гироузлом 2 напрямую через второй РСУ2 11, выполненный аналогично первому РСУ1 10. Управление второго двигателя Д2 9 и второго РСУ2 11 осуществляется сигналами ФУС 6 по командам микро ЭВМ формирователя сигналов управления по крену, рысканью и тангажу 12.
Разъединение РСУ1 10 и затем соединение РСУ2 11 осуществляется после синхронизации угловой скорости выходного вала редуктора 4 с угловой скоростью вала второго двигателя Д2 9, путем сравнения скоростей вращения первого Д1 3 и второго Д2 9 двигателей в микро ЭВМ формирователя сигналов управления по крену, рысканью и тангажу 12 (двигатели могут иметь, например, встроенный датчик частоты вращения ротора, как, например, в управляемом моментном бесконтактном двигателе постоянного тока двигателя-маховика ДМ1-20, выпускаемом в АО "Корпорация "ВНИИЭМ", г. Москва).
В режиме, когда второй двигатель Д2 9 соединен напрямую (без редуктора, снижающего его выходную скорость) с гироузлом 2, обеспечивается высокая скорость вращения гироузла 2, в результате чего формируется большой управляющий момент гиродина 7 и обеспечивается динамичная (высокоскоростная) переориентации КА на объект.
При переходе на режим стабилизации КА, который описан выше, осуществляется синхронизация угловой скорости вала второго двигателя Д2 9 с угловой скоростью выходного вала редуктора 4, разъединение РСУ2 11 и затем соединение РСУ1 10.
Парное расположение гиродинов 7, 13 (или гиродинов 14, 15) в одной координатной плоскости с параллельными осями прецессии, при выполнении условия одновременного раскручивания пары гироскопов в разных направлениях, позволяет обеспечить отсутствие механического вращательного воздействия на КА вокруг центра масс в течение всего временного интервала процесса раскручивания.
Таким образом, для получения динамичной ориентации (сокращения времени перенацеливания на объект) КА, управление угловой скоростью поворота гироузла гиродина вокруг оси прецессии от двигателя осуществляют напрямую с целью обеспечения высокой угловой скорости гироузла гиродина и большого управляющего момента на КА, а для получения высокоточной стабилизации КА управление угловой скоростью поворота гироузла гиродина вокруг оси прецессии от двигателя осуществляют через редуктор с целью получения низкой (прецизионной) угловой скорости гироузла и снижения управляющего момента на КА.
Способ динамичной высокоточной ориентации и стабилизации космического аппарата, заключающийся в обеспечении поворота КА на заданные углы по крену, рысканью и тангажу посредством исполнительных органов - гиродинов, содержащих двигатели-маховики, помещенные в гироузлы, имеющие возможность управляемого контролируемого вращения, при этом ротор каждого двигателя-маховика раскручивают до заданной максимальной постоянной скорости, получая в результате гироскоп, а двигателем через редуктор обеспечивают вращение каждого гироузла вокруг своей оси прецессии, перпендикулярной оси гироскопа, создавая, тем самым, управляющие механические моменты гиродинов по связанным осям КА и стабилизацию положения КА, отличающийся тем, что по достижении стабилизации КА по каждой оси прецессии вводят в действие второй двигатель - безредукторный, расположенный на одной оси с редуктором первого двигателя, синхронизируют угловую скорость безредукторного двигателя с угловой скоростью выходного вала редуктора, после чего отсоединяют редуктор от гироузла, подсоединяют к нему вал безредукторного двигателя и продолжают управление космическим аппаратом в высокодинамичном режиме, обеспечивающем поворот КА на заданные углы по крену, рысканью и тангажу.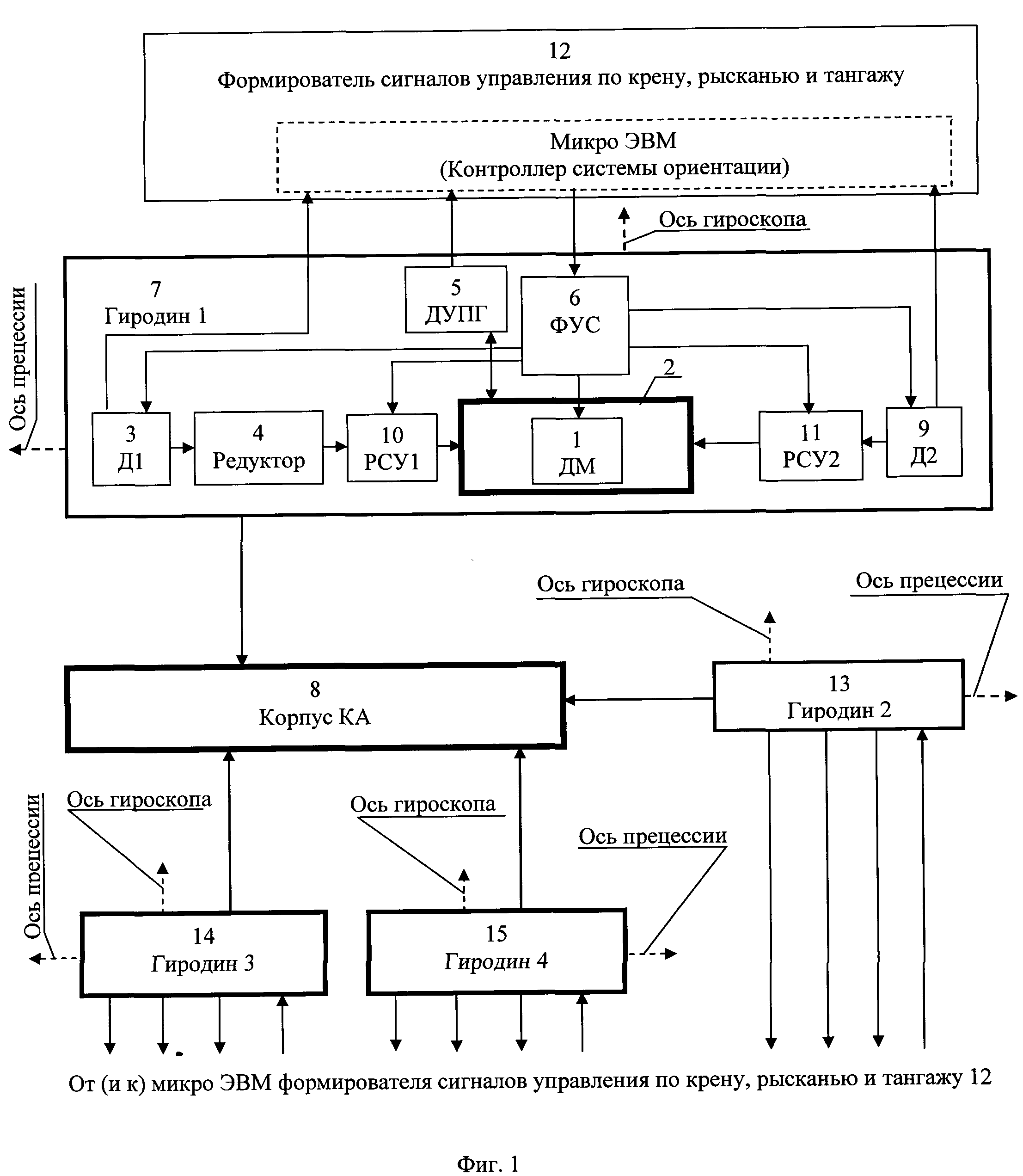
Способ изготовления трехслойной композитной панели
Способ и устройство управления движением космического аппарата с управляемой ориентацией
Устройство терморегулирования космического аппарата
Способ обеспечения автономного электропитания
Способ увеличения срока эксплуатации аккумуляторных батарей на космических аппаратах
Способ заряда комплекта аккумуляторных батарей в составе автономной системы электропитания космического аппарата
Способ управления автономной системой электроснабжения космического аппарата
Система электропитания космического аппарата
Способ транспортирования автономной электростанции
Устройство синхронного генератора с возбуждением от постоянных магнитов
Способ ориентации космического аппарата в путевой системе координат с приводом поворота аппаратуры наблюдения наземных объектов и устройство для его осуществления
Гирокомпасная система ориентации искусственного спутника земли
Способ автоматической компенсации ошибок бесплатформенной системы ориентации в системе управления ориентацией космических аппаратов, и устройство, реализующее этот способ
Устройство для очистки биологических жидкостей
Аппарат сочетанной детоксикации крови и лимфы
Слиток для деформирования
Способ изготовления модельного образца для определения деформаций
Устройство управления нагревателями аппаратуры космического аппарата
Гирокомпасная система ориентации искусственного спутника земли
Способ ориентации космического аппарата с использованием бесплатформенного орбитального гирокомпаса и система для его осуществления

