Результат интеллектуальной деятельности: Способ автоматизированного отбора и исследования проб почвы и устройство для его осуществления
Вид РИД
Изобретение
Изобретение относится к отрасли сельского хозяйства, а именно к области исследования состояния почвы, может использоваться в сельском хозяйстве для отбора проб почвы с различной глубины и проведения исследований по некоторым ее физико-механическим и химическим свойствам.
Известен способ отбора проб для анализа почвы [1]. Данный способ отбора проб, включает определение места, частоты, длительности отбора проб почвы на площадках по координатной сетке, указывая их номера и координаты, при этом, в каждом узле координатной сетки или ее части закладывают площадку отбора проб почвы симметричной формы с симметрично расположенными относительно ее границ рядами точек взятия проб. К тому же площадку отбора проб почвы закладывают размерами 2×2 м, а минимальное количество проб почвы равно девяти, на одной площадке.
Недостатком данного способа является невозможность автоматизации картирования поля и применения автоматизированных (роботизированных) устройств для отбора проб. Возможен лишь отбор проб ручными пробоотборниками, что требует высоких затрат труда и времени, а также не позволяет осуществить массовый (множественный) отбор проб, что также является недостатком способа, т.к. сокращает его информативность и достоверность.
Недостатком является и то, что из девяти отобранных проб, на каждой площадке (элементарном участке), составляется усредненная проба почвы, направляемая на лабораторный анализ, возможность отбора, сохранения и последующего анализа каждой из девяти проб в отдельности не предусмотрена, что также сокращает информативность данного способа.
Известно устройство «Автоматизированный почвенный пробоотборник с дистанционным управлением» [2]. Полезная модель относится к устройствам, предназначенным для точного и быстрого отбора проб почвы, и может быть использована для контроля ее состояния. Устройство позволяет повысить эффективность процесса отбора проб, снизить затраты труда и времени на отбор проб за счет частичной автоматизации процесса работы и дистанционного управления известным устройством. Известный пробоотборник содержит самоходное шасси с приводным устройством, блок управления и контроля, пробоотборник для взятия проб почвы, конвейер для транспортирования проб почвы, систему связи и навигации, систему удаленного управления, а также совокупность датчиков, обеспечивающих соблюдение траектории движения пробоотборника и систему глобального позиционирования [2].
Данный пробоотборник благодаря предложенной совокупности механизмов, устройств и датчиков позволяет сократить время отбора проб, снизить трудоемкость и частично автоматизировать процесс отбора проб почвы.
Недостатком данного устройства является невозможность полной автоматизации управления им либо роботизации. Программирование управления устройством невозможно, т.к. оно не содержит программируемых элементов, блоков или контроллеров, поэтому является дистанционно управляемым и, для управления им, необходим оператор.
Также к недостаткам известного устройства относится и невозможность анализа почвенных проб в процессе их отбора, по основным критериям: влажности, кислотности, твердости, что также снижает информативность обследования почв.
Наиболее близким по сходным признакам к предлагаемому является известный «Усовершенствованный способ агрохимического обследования почв» [3]. Изобретение относится к области сельского хозяйства, а именно к агрохимическому картографированию пахотных земель [3].
Сущность изобретения состоит в том, что известный способ включает выделение контуров по результатам дистанционного зондирования полей с открытой (вспаханной) почвой на обработанных радиолокационных аэрокосмических снимках и перенесение контуров на карты землепользования. С помощью контуров выделяются элементарные участки для отбора почвенных образцов на бумажные носители и в натуре. Контуры выделяются с помощью отраженных сигналов радиолокатора бокового обзора дециметрового диапазона длин волн и на основании коэффициента криволинейной корреляции, который определяется соотношением величины отраженного сигнала радиолокатора к агрохимическим показателям, судят о почвенном плодородии [3].
Данный способ обладает возможностью корректировки координат точек отбора проб, полученных на основании данных радиолокации, что позволяет повысить адаптивность способа к различным условиям реальной местности, однако он обладает и недостатками.
Недостатком известного способа является сложность подготовительных работ по картированию поля (радиолокационные измерения, обработка данных, выделение контуров плодородия и их определение на бумажном носителе и в натуре), это требует участия высококвалифицированных специалистов, больших затрат времени и труда и невозможности автоматизации картирования, а также выполнения массового (множественного) отбора проб, необходимых для составления карт плодородия почв.
Также недостатком данного способа является невозможность автоматизации процесса отбора проб, т.к. по данному способу возможен лишь ручной отбор.
Недостатком является и то, что известный способ не предусматривает возможности проведения экспресс-анализа физико-химических показателей почвы в полевых условиях, а результаты радиолокационного исследования с криволинейной корреляцией обладают невысокой достоверностью. Так как отражательная способность поверхности поля существенно зависит от его чистоты, макро- и микрорельефа, механического состава. Для повышения достоверности криволинейной корреляции необходим большой массив экспериментальных данных (отобранных проб), а массовый отбор проб почвы, как описано выше, затруднителен из-за большого количества операций выполняемых вручную.
Недостатком является и то, что в процессе отбора проб с каждого участка составляется, также, как и в предыдущих способах, усредненная проба, направляемая на лабораторный анализ, возможность сохранения и последующего анализа отдельных проб без усреднения, не предусмотрена, что существенно сокращает информативность данного способа.
Недостатком является и то, что отбор проб, по данному методу производится вручную (методом раскопки шурфов и выемки больших объемов почвы). Это увеличивает время проведения отбора проб и его трудоемкость.
Данный способ обладает признаками субъективности, так как корректировка координат точек отбора проб проводится оператором (по данным радиолокации) на основании сведений о рельефе поверхности поля.
Нерешенной проблемой, по известным способам, является невозможность расчета координат точек отбора проб почвы с учетом конфигурации контура поля, т.к. навигационные системы не имеют программных средств для анализа контура и расчета координат точек отбора проб, как с учетом формы контура, так и с учетом концентрации точек.
Цель изобретения: усовершенствовать способ отбора проб почвы путем автоматизации картирования поля и разработки роботизированного устройства для его осуществления.
Способ заключается в том, что первоначально проводится картирование исследуемого поля. Картирование заключается в составлении контура поля, разделении площади поля на отдельные элементарные участки, расчете координат этих участков и точек отбора проб на данных участках с учетом формы контура поля, параметров и ориентации координатной сетки, концентрации точек отбора проб. Расчет координат, перечисленных точек, осуществляется автоматизированно, на основе разработанных теоретических зависимостей.
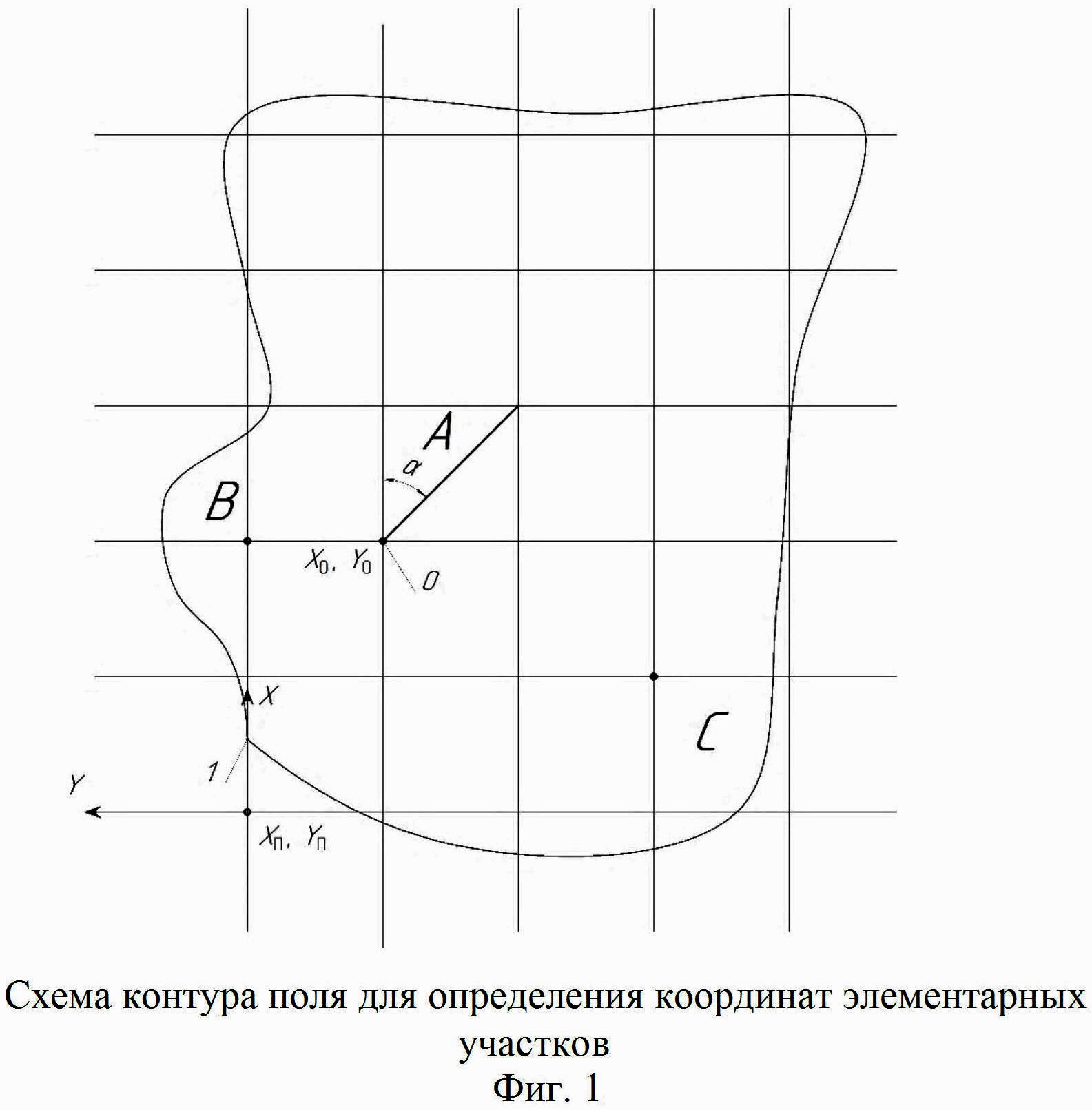
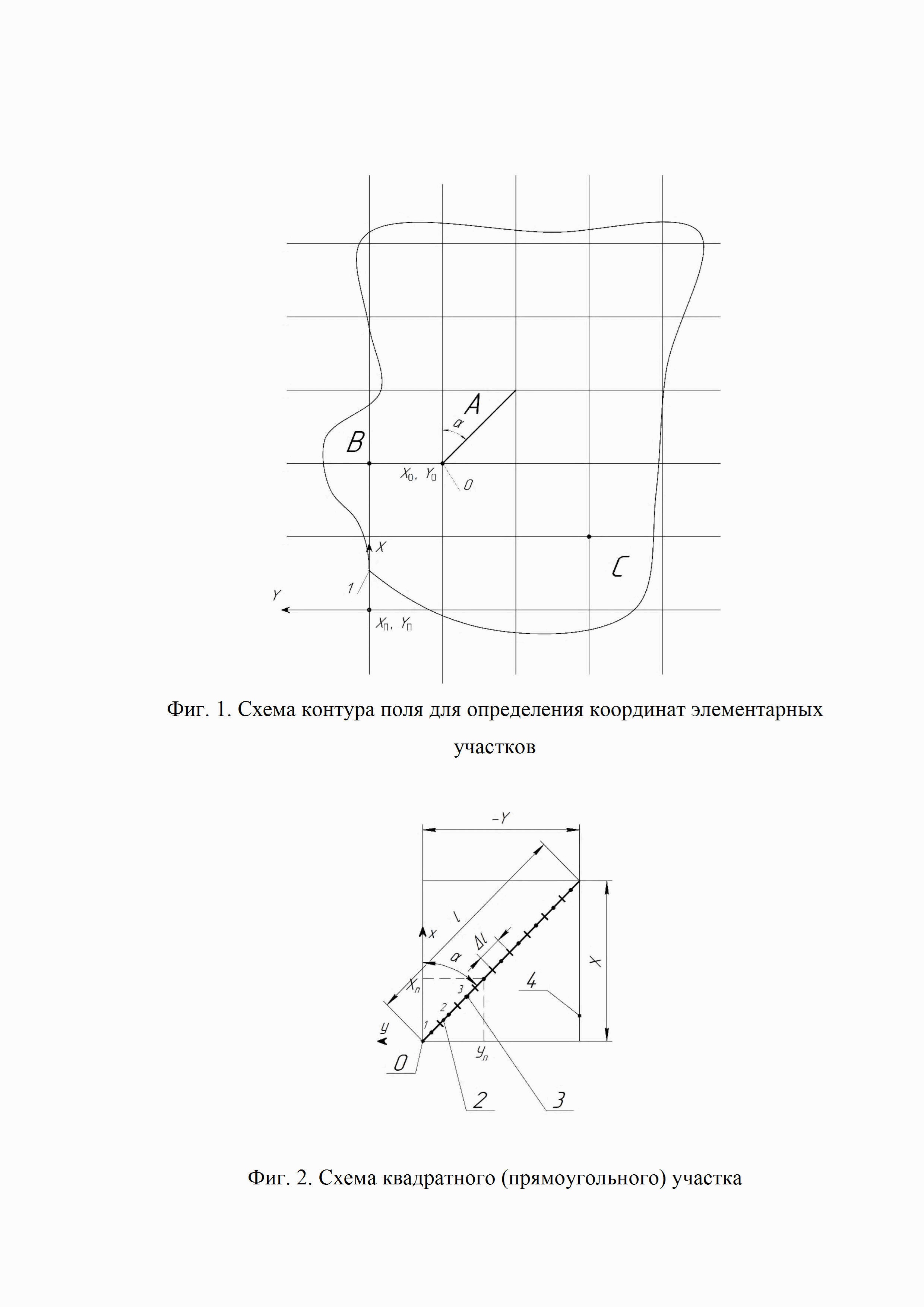
Для составления контура поля оператор объезжает его по замкнутому контуру с работающей мобильной навигационной системой (стандартов GPS / ГЛОНАСС), автоматически определяя и фиксируя маршрут движения, а при возвращении в исходную точку (точка 1, Фиг. 1) создается контур поля, который сохраняется в памяти компьютера. Далее, данные из навигационной системы передаются в ГИС систему и обрабатываются на персональном компьютере.
На этом этапе задаются параметры координатной сетки и проводится ее накладывание на полученный контур поля. Таким образом площадь поля делится на отдельные элементарные участки с координатами Х0 и Y0, а на данных участках определяются координаты точек отбора проб, на основании разработанных теоретических зависимостей. Координаты элементарного участка рассчитываются в привязке к базовой точке поля XП YП, координаты которой определяются навигационной системой (Фиг. 1).
Далее рассчитываются координаты точек отбора проб внутри каждого элементарного участка. Как правило (по умолчанию) на каждом участке отбирается по 9 проб в 9-ти точках соответственно. Данные точки располагаются по определенной траектории, например, по диагонали участка (если участок правильной формы), либо по криволинейной траектории, зависящей от конфигурации исследуемого элементарного участка (если участок неправильной формы).
Внутренние участки (участки координатной сетки, располагающиеся внутри поля и не прилегающие к его контуру) могут иметь квадратную либо прямоугольную форму (участок А, Фиг. 1). Участки, прилегающие к контуру поля, имеют одной из своих сторон кривую линию (например, участки В и С, Фиг. 1). Таким образом, расчет координат точек отбора проб и, соответственно, траектории движения пробоотборника к этим точкам и между ними, имеет специфику.
Рассмотрим вариант расчета координат на участке прямоугольной либо квадратной (правильной) формы (Фиг. 2).
Диагональ проводится из базовой точки данного участка (точка «0», Фиг. 1 и Фиг. 2), она образует угол альфа α с осью абсцисс. Далее проводится измерение длины этой диагонали и еe разделение на k-ое количество (k как правило равно 9-ти) одинаковых элементарных отрезков Δ1. Точки отбора проб почвы располагаются строго по центрам полученных отрезков Δl
Координаты точек отбора проб (точки 1; 2; 3 и т.д., Фиг. 2) рассчитываются относительно ранее определенных координат точки «0» - базовой точки или точки входа на элементарный участок.
Для прямоугольного (квадратного) участка расчет координат, проводится по следующим зависимостям (Фиг. 2):


где n - номер соответствующей точки отбора пробы (от 1 до k);
X0, Y0 - координаты базовой точки элементарного участка поля, м;
Δl - длина элементарного отрезка диагонали элементарного участка поля, м.
Либо по аналогичным зависимостям без тригонометрических функций


где k - количество точек отбора проб на элементарном участке поля, шт.
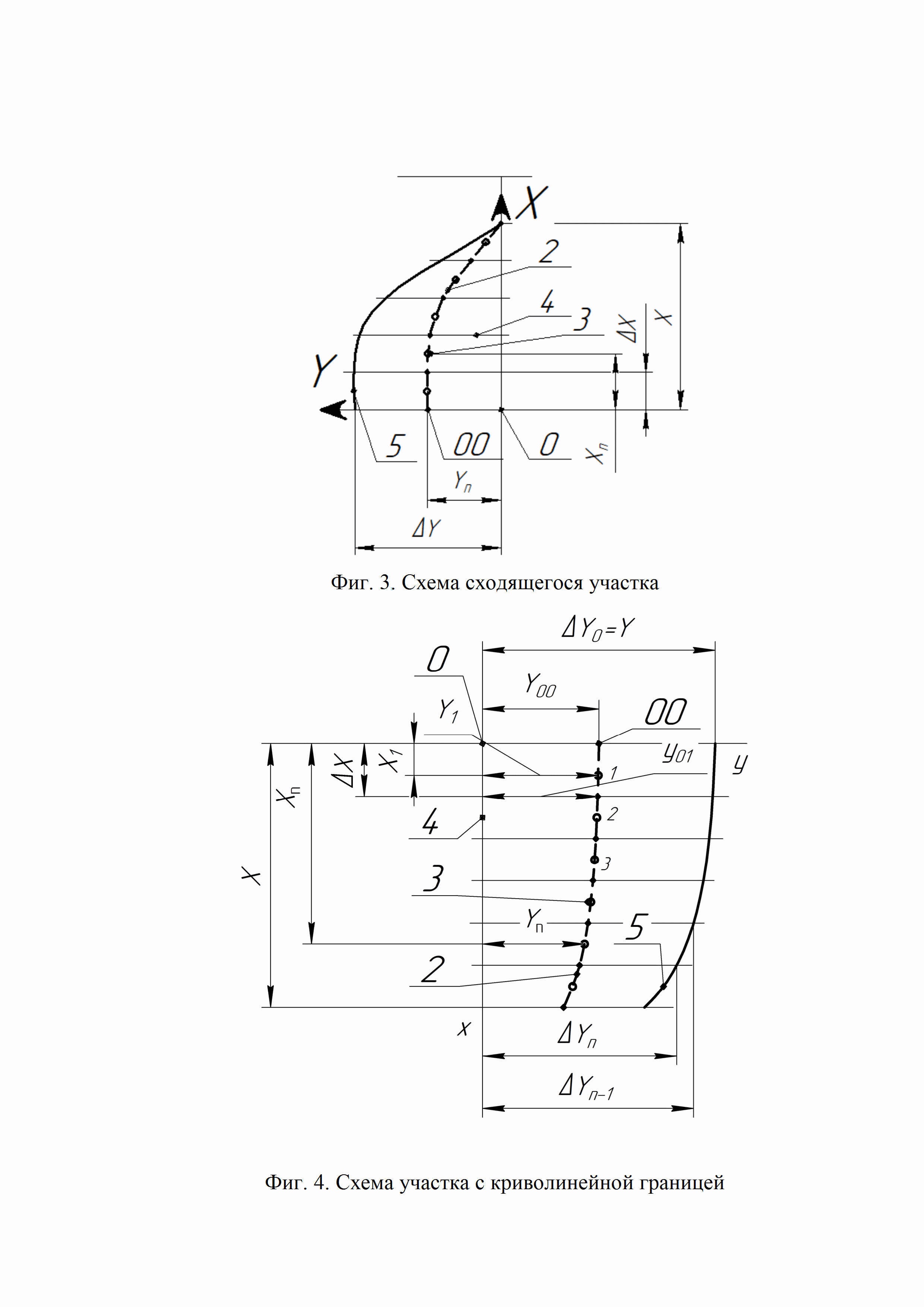
Если элементарный участок имеет криволинейную границу (сходящийся (Фиг. 3) или открытый (Фиг. 4), это соответственно участки В и С (Фиг. 1)) (участок не правильной формы), то траектория расположения точек отбора проб является средней линией по ординатам криволинейного края. Для расчета координат данной траектории ось абсцисс удобнее совместить с наибольшей (или единственной) линией координатной сетки, к которой прилегает данный участок (Фиг. 3; Фиг. 4).
Далее определяются координаты точек отбора проб, расположенных на полученной средней линии участка, при этом координаты по осям абсцисс и ординат рассчитываются следующим образом.
Координаты по оси абсцисс рассчитываются последовательно от точки «0», как средние точки каждого k-го элементарного отрезка Δl, равномерно распределенного по этой оси (Фиг. 4). Например, координата конца первого элементарного отрезка ΔХ, а его центра (первой точки отбора проб), соответственно Х1. Тогда Хn -- координата любой точки отбора проб на данном участке по оси абсцисс:

С учетом того, что элементарный отрезок ΔX = Х/n, получается

Ординаты соответствующих n-ных точек отбора проб Yn из их k количества определяются по средней линии участка, то есть как среднее значение ординаты криволинейной границы, при соответствующем значении координаты по оси абсцисс точки n:

где Δy(n-1) - ордината криволинейной границы в начале элементарного n-го участка, м;
Δyn - ордината криволинейной границы в конце того же элементарного n-го участка, м.
Таким образом, рассчитываются координаты всех точек отбора проб на элементарном участке. Объединяя полученные точки можно получить линию оптимальной траектории движения пробоотборника.
В процессе отбора проб почвы необходимо двигаться по полученной средней линии криволинейного участка. Координаты точки «00» входа пробоотборника на данные участки могут не совпадать с координатами самого элементарного участка (точки «0» Фиг. 1; Фиг. 3; Фиг. 4), определяемыми в начале (при наложении координатной сетки). То есть, например, для участка С (Фиг. 1; Фиг. 4) координаты составят:

Таким образом, координаты точки «00» входа на элементарный участок рассчитываются для каждого участка отдельно, но по одинаковому выше представленному алгоритму автоматизированно в ГИС программе на компьютере.
В результате проведенных вычислений по картированию, получается электронная карта поля с определенными координатами точек отбора проб.
Преимуществом предложенного способа является то, что корректировка координат точек отбора проб оператором, исходя из субъективных данных, не проводится, что повышает объективность проводимых исследований и их достоверность.
Полученные теоретические зависимости позволяют рассчитать координаты точек отбора проб почвы с учетом конфигурации контура поля, требуемых параметров координатной сетки и концентрации точек отбора проб (их количества на каждом элементарном участке).
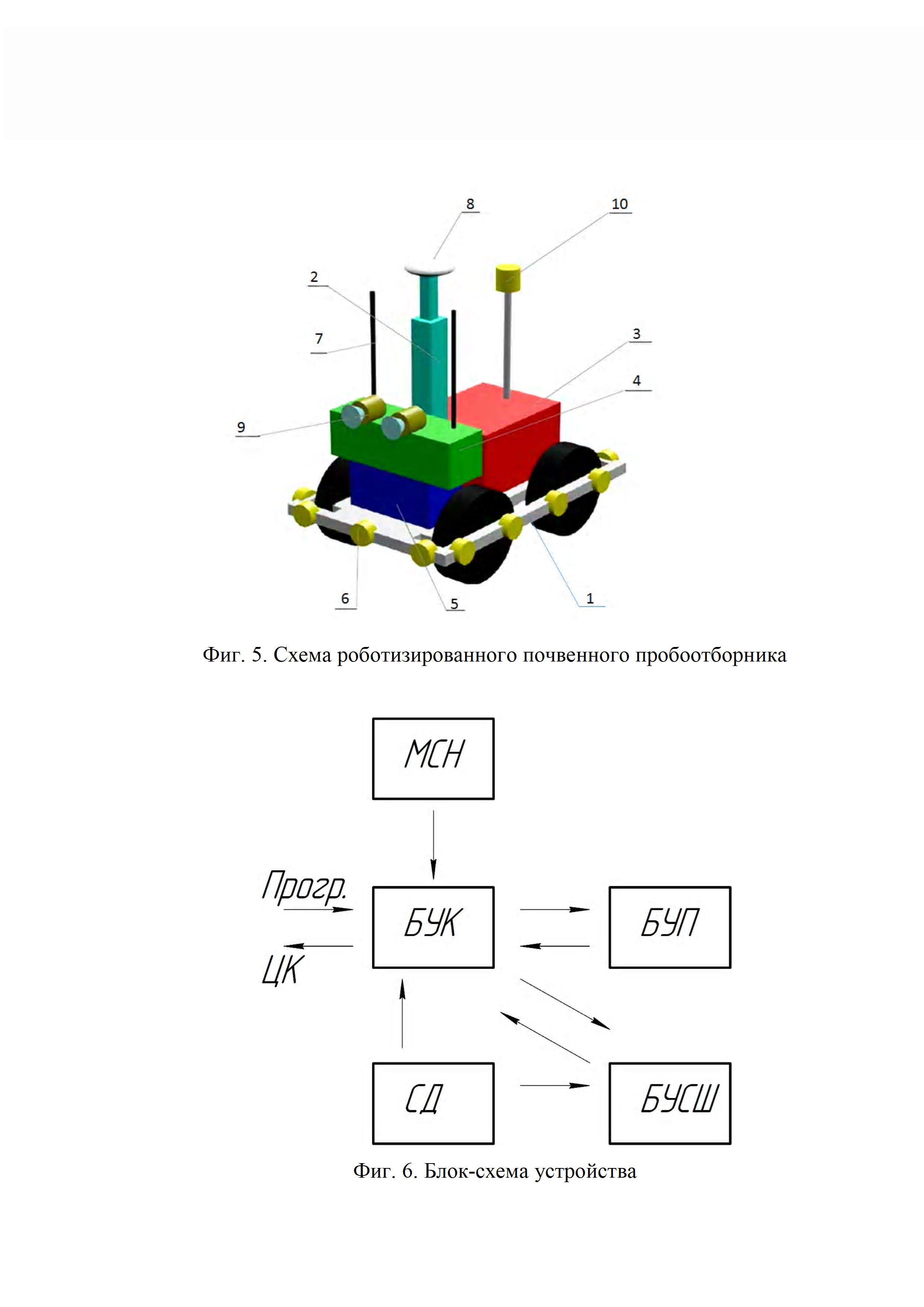
Предложенный способ осуществляется с помощью предлагаемого специального устройства - автоматизированного робота-пробоотборника (Фиг. 5). Возможно, применение одновременно одного или нескольких роботов-пробоотборников.
Полученная (в результате картирования) электронная карта поля является исходным техническим (программным) заданием для роботов-пробоотборников, определяющим маршруты их движения к точкам отбора проб и между точками.
Робот-пробоотборник состоит из самоходного шасси 6, состоящего, в свою очередь, из рамы, четырех ведущих колесах, приводимых в движение управляемым электроприводом с автоматизированным рулевым управлением, пробоотборника 7, смонтированного на самоходном шасси 6, также снабженного управляемым электроприводом и системой датчиков, контролирующих процесс его работы. На самоходном шасси 6 установлена аккумуляторная батарея 8. В передней части устройства расположен блок управления и контроля (БУК) 9, содержащий программируемый бортовой компьютер с функцией анализатора сигналов датчиков, аналогово-цифровые преобразователи (АЦП), связывающие аналоговые выходы системы датчиков (СД) 10 и цифровые входы БУК 9, цифро-аналоговые преобразователи (ЦАП), связывающие цифровые выходы БУК 9 и аналоговые реле управления электроприводами самоходного шасси 6 и пробоотборника 7. Также в состав БУК 9 входит блок управления пробоотборником (БУП) 11 и блок управления самоходным шасси (БУСШ) 12 (Фиг. 6). В нижней части пробоотборника 7, на самоходном шасси 6 установлен накопитель 13 для сбора отобранных проб почвы, содержащий конвейерную ленту со съемными контейнерами. Система двусторонней радиосвязи 14, установленная на блоке управления и контроля 9, обеспечивает связь робота-пробоотборника с центральным пунктом управления (с оператором). Ориентация устройства в пространстве осуществляется за счет модуля спутниковой навигации (МСН) 15, установленного на корпусе пробоотборника 7. В передней верхней части устройства, на блоке управления и контроля 9, установлена видеосистема 16, содержащая две цифровые поворотные видеокамеры, связанные с бортовым компьютером блока БУК 9 и системой связи 14. В задней части устройства предусмотрено светозвуковое сигнальное устройство 17 (Фиг. 5, Фиг. 6).
Такая совокупность признаков заявленного способа и устройства для его осуществления, позволяет:
- автоматизировать процесс картирования поля, т.к. оператору необходимо задать входные параметры координатной сетки и объехать поле по контуру с работающей мобильной навигационной системой, а построение контура поля, расчет координат элементарных участков, точек отбора проб и траектории движения роботов-пробоотборников к этим точкам и между ними, осуществляется автоматически, по предложенному алгоритму и разработанным зависимостям, тем самым позволяя существенно снизить затраты труда и времени на картирование поля;
- автоматизировать (роботизировать) процесс отбора проб почвы за счет применения предложенного устройства (робота-пробоотборника), снабженного программируемым блоком управления и контроля (БУК), выполняющего отбор проб почвы на основании составленной, в процессе картирования, электронной карты поля. Это позволяет существенно снизить затраты труда и времени, т.к. участие оператора, в нормальном режиме работы, минимально. Применение одновременно нескольких предлагаемых устройств (роботов-пробоотборников) позволит производить отбор большего числа проб (массовый отбор);
- проводить анализ отобранных проб почвы по трем показателям (влажность, кислотность, твердость) непосредственно в процессе отбора проб в автоматическом режиме, в реальном времени, за счет специальных датчиков, размещенных в пробоотборнике предлагаемого устройства;
- отбирать и накапливать отобранные пробы почвы по отдельности, без усреднения и смешивания в одну пробу. Отдельное хранение проб почвы позволяет в дальнейшем, углубленно их анализировать в агрохимической лаборатории, что существенно повышает информативность предлагаемого способа.
Принцип работы предлагаемого устройства (робота-пробоотборника) в соответствие с предложенным способом, следующий.
В результате картирования создается электронная карта поля, содержащая исходные данные для формирования технического задания для каждого пробоотборника.
Задание содержит координаты базовых точек участков (точка 1, Фиг. 1), точек входа пробоотборника на каждый отдельный элементарный участок (точка 0, Фиг. 1; точки 00, Фиг. 3 и Фиг. 4), и точек отбора проб (точки 1, 2, 3 на Фиг. 2, точка 3 на Фиг. 3 и Фиг. 4).
К месту проведения исследований роботы-пробоотборники доставляются в прицепе или кузове автомобиля. На месте производится их выгрузка, проверка, загрузка заданий (программирование) в бортовой компьютер БУК 9 и запуск устройств.
Движение роботов осуществляется с помощью автоматизированного электропривода, а управление по сигналам модуля спутниковой системы навигации 15 и бортовых датчиков 10 (Фиг. 5). При достижении требуемой точки отбора пробы почвы, система навигации 15 подает сигнал в БУК 9, который подает сигнал в блок управления самоходным шасси 6 и останавливает его (Фиг. 5, Фиг. 6). Далее БУК 9, по заданной программе, подает сигнал о начале отбора пробы почвы в блок управления пробоотборником (БУП) 11 (Фиг. 6), который в автоматическом режиме управляет процессом отбора проб почвы.
Отбор пробы осуществляется путем погружения полого бура пробоотборника 7 в почву, на заданную глубину, и всасывания пробы через полость бура с дальнейшим размещением отобранной, таким образом, пробы, в контейнеры накопителя 13. Контейнеры являются съемными и закреплены на конвейерной ленте, это позволяет автоматизировать процесс отбора проб почвы и их компактного размещения в накопителе 13, который позволяет за одно задание отобрать пробы с нескольких элементарных участков. Контейнеры накопителя однозначно сопоставляются с точками отбора проб в электронном задании (при программировании). Забор проб почвы осуществляется за счет потока разряженного воздуха, создаваемого вакуумным насосом (входящем в состав пробоотборника 7) во внутренней полости бура, которому сообщается вращательное и колебательное движения, уменьшая, тем самым, нагрузку на его механизм и обеспечивая высокую скорость забора почвы и однородность образцов по глубине. Режущие кромки головки бура дробят почву и частицы вовлекаются в воздуховод. Для отделения частиц почвы от воздуха в пробоотборнике 7 установлен циклон, из нижней части которого пробы почвы ссыпаются в контейнеры накопителя. Робот может контролировать глубину отбора проб в соответствии с заданием, его конструкция спроектирована так, чтобы получать почву с нужной глубины, без перемешивания по слоям. В накопителе имеется контейнер без дна, через который можно удалять ненужные пробы (слои) почвы. После завершения отбора проб или при заполнении накопителя 13, роботы возвращаются в точку старта (точка 1 на Фиг. 1) или в точку завершения работы, дополнительно внесенную в задание. Это дает возможность оператору после запуска задания переместиться в другой край поля и избежать лишних перемещений роботов по полю.
Далее, как только проба почвы уложена в контейнер, с помощью электронных датчиков производится ее экспресс анализ по основным трем физико-химическим показателям: влажность, кислотность, твердость.
По завершению работы оператор извлекает контейнеры из накопителя 13, и отправляет пробы почвы на углубленный анализ в агрохимическую лабораторию.
Предлагаемый автоматизированный почвенный робот-пробоотборник способен производить отбор проб почвы с глубины до 30 см. Электропитание всех электроприводов, датчиков и блоков осуществляется от электрической аккумуляторной батареи 8. Посредствам системы датчиков 10, связанных с БУК 9, происходит постоянный контроль процесса работы и окружающей обстановки.
При возникновении нештатной ситуации или препятствий сигналы от датчиков 10 поступают в БУК 9, который посредством БУП - 11 и БУСШ - 12 останавливает роботу и движение устройства, а на пункт управления (удаленному оператору), с помощью системы связи 14, подается предупредительный сигнал, оператор в ручном режиме, по показаниям датчиков 10 и системы видеонаблюдения 16, имеет возможность оценить ситуацию и принять решение о продолжении работы или переводе пробоотборника в ручное управление.
Пример реализации способа.
Исследования проводились на территории сельскохозяйственного предприятия «Арловка-Агро» Похвистневского района Самарской области, на экспериментальном поле.
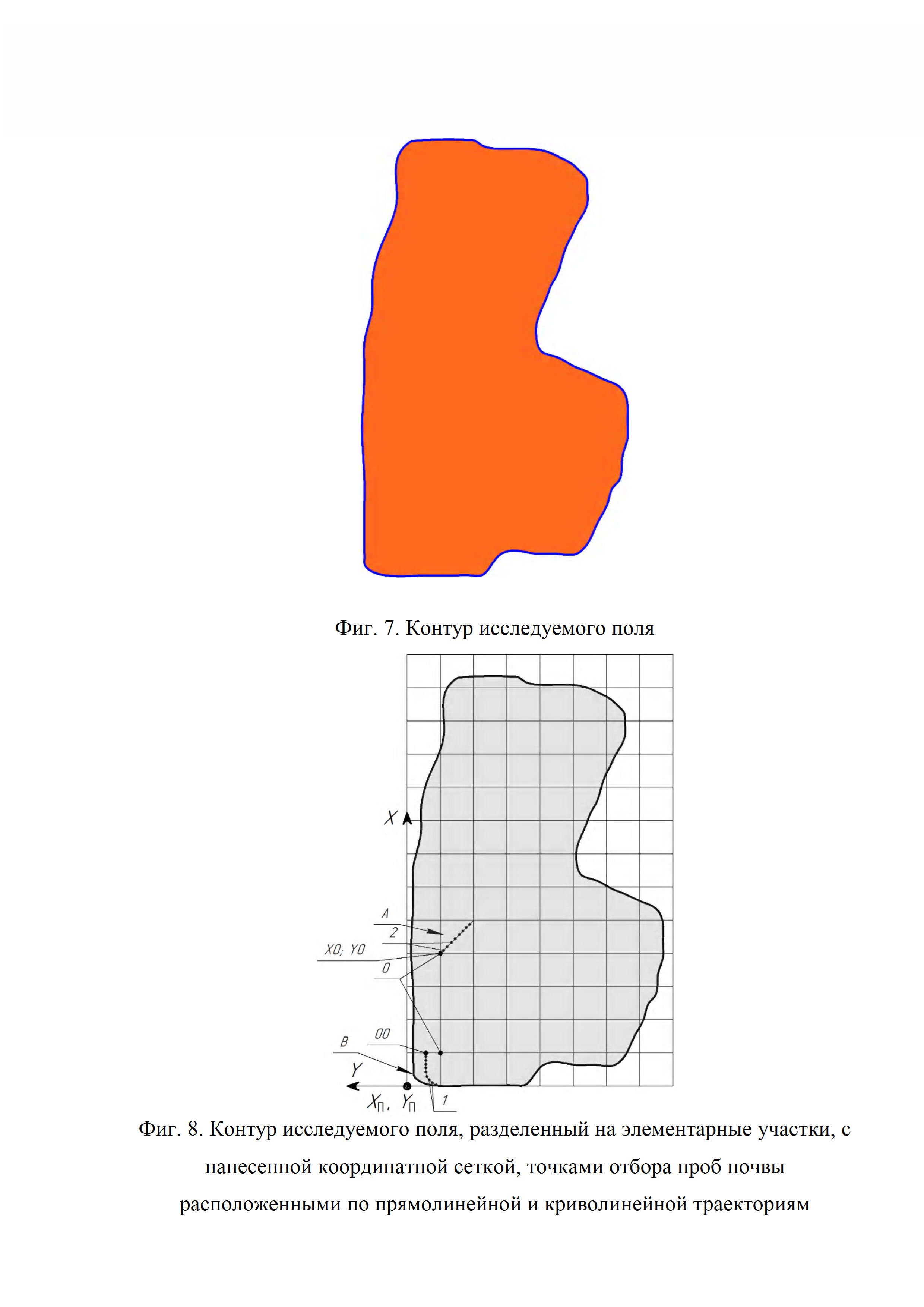
Исследование начинается с картирования поля. Для этого оператор объезжает поле с работающей мобильной навигационной системой, состоящей из высокоточного навигационного приемника «EZ-Guide-250», работающего по стандарту GPS/ГЛОНАСС и специальной программы «SMS Mobile», автоматически определяя и фиксируя координаты маршрута движения, а при возвращении в исходную точку (точка 1, Фиг. 1) создается контур поля (Фиг. 7), который сохраняется в памяти компьютера. Далее, данные из навигационной системы передаются в ГИС систему «SMS Advanced» и обрабатываются на персональном компьютере.
На этом этапе задаются параметры координатной сетки и проводится ее накладывание на полученный контур поля. Таким образом площадь поля делится на отдельные элементарные участки с координатами Х0 и Y0, (координаты точки 0). На данных участках определяются координаты точек отбора проб (точки 1 и 2 на Фиг. 7, Фиг. 8 и Фиг. 9), на основании предложенных математических зависимостей.
Рассмотрим расчет координат на элементарных участках А и В. Параметры координатной сетки, следующие 50х50 м. Таким образом координаты участка А составят Х0 = 200 м, Y0 = -50 м. Размеры участка А, относительно его базовой точки X = 50 м, Y = -50 м. Координаты участка В, соответственно Х0 = 50 м, Y0 = -50 м (Фиг. 8). Размеры участка В, относительно его базовой точки X = -50 м, Y = 50 м. Координаты участков определены относительно базовой точки поля XП, YП, координаты которой определяются навигационной системой.
На участке А диагональ участка составит 70,71 м, а длина элементарного отрезка Δl = 7,86 м. Таким образом, координаты любой точки отбора проб на данном участке можно вычислить. Например, координаты точки 4, составят X4 = 219,44 м, Y4 = -69,44 м.
Если элементарный участок имеет криволинейную границу (сходящийся (Фиг. 3) или открытый (Фиг. 4), это соответственно участки В и С (Фиг. 1)), то точки отбора проб располагаются на средней линии по ординатам криволинейного края, по зависимостям (5) и (6).
Например, для участка В, координата 5-ой точки отбора проб составят (ординаты Δy(n-1) = Δy4 = 14 м, Δyn = Δy5 = 8 м) Х5 = 25 м, Y5 = -44 м.
Таким образом, рассчитываются координаты всех точек отбора проб на элементарном участке. Объединив полученные точки получается линию оптимальной траектории движения пробоотборника. В процессе отбора проб почвы необходимо двигаться по полученной средней линии криволинейного участка.
Координаты точки входа на данные участки не совпадают с координатами самого элементарного участка (точки «0» Фиг. 1), определяемыми в начале (при наложении координатной сетки). То есть, например, для участка С (Фиг. 1; Фиг. 4) координаты рассчитываются по зависимостям (8).
Таким образом, координаты точки входа на элементарный участок рассчитываются для каждого участка отдельно, но по одинаковому выше представленному алгоритму автоматизированно (по программе).
В результате такого картирования и координирования получается электронная карта поля с определенными координатами точек отбора проб (Фиг. 8).
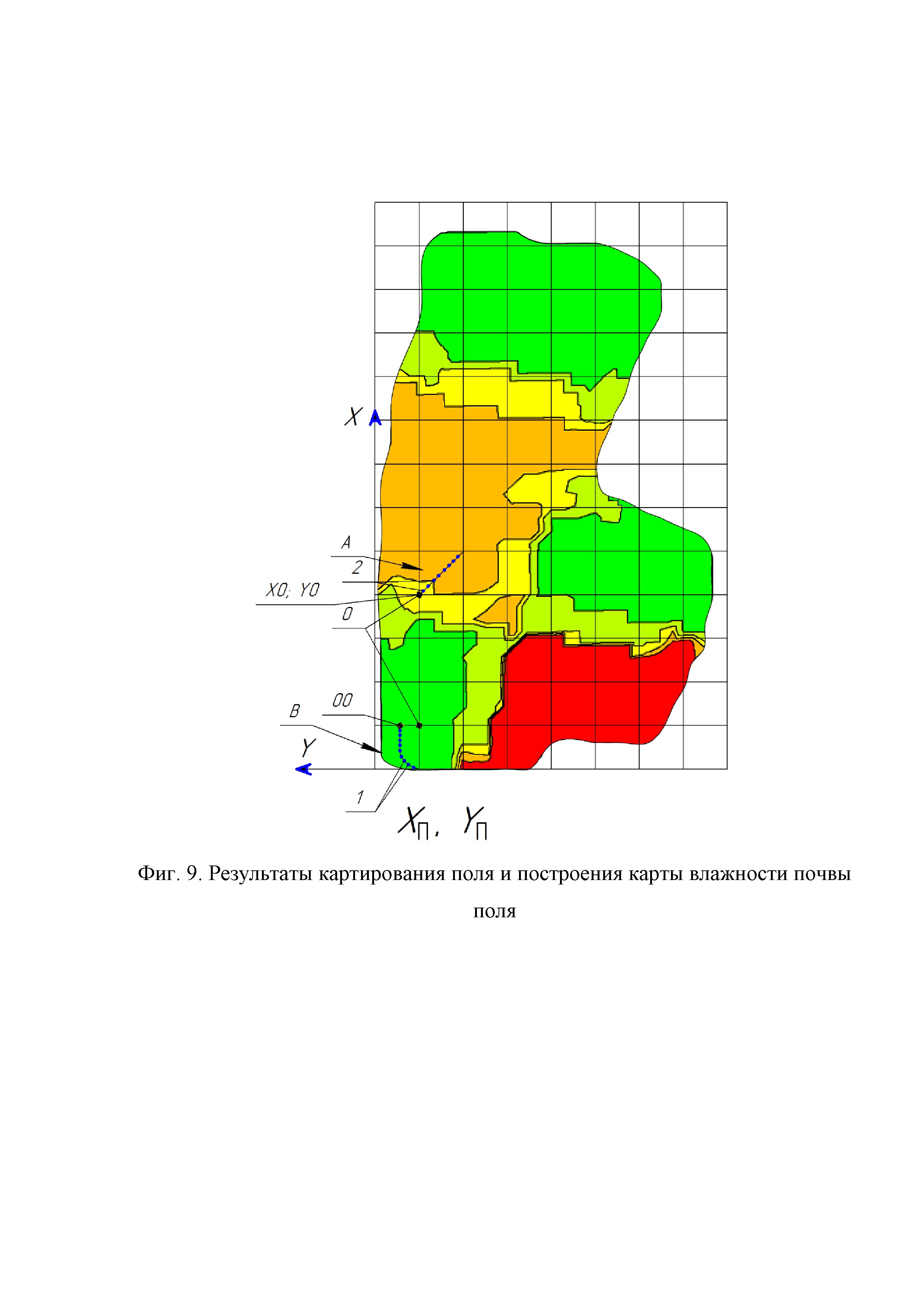
На рисунке (Фиг. 9) показана электронная карта влажности почвы исследуемого поля. Карта получена следующим образом, например, для участка «А»: предлагаемое устройство (робот-пробоотборник) движется по координатам прямолинейной траектории расположения точек отбора проб. Останавливаясь поочередно в каждой из точек 1, 2, 3 и т.д., производит отбор пробы почвы в автоматическом режиме. Отобранная проба почвы ссыпается в отдельный контейнер. Измерение влажности почвы производится электронным датчиком влажности, по методу измерения удельного сопротивления почвы прохождению переменного тока через нее. Величина удельного сопротивления почвы интерпретируется в величину ее влажности на основании предварительно полученных тарировочных зависимостей. Результаты измерения влажности фиксируются в памяти компьютера пробоотборника в привязке с координатами точки отбора данной пробы.
В результате наложения величин влажности проб почвы на карту поля (в соответствии с координатами точек отбора проб) получается электронная карта влажности почвы поля (Фиг. 9).
Для оценки экономической эффективности автоматизации картирования, по предлагаемому способу, необходимо определить экономию затрат времени и труда на выполнение картирования, в сравнении с традиционным методом [4].
Время выполнения картирования также существенно сокращается по сравнению с известными способами. Основные затраты времени, по предлагаемому способу, приходятся на объезд поля по контуру. В данном примере, при движении оператора с наименьшей скоростью 10 км/ч (2,8 м/с) и длине контура 1121 м, время объезда составит 6,67 минуты, а дальнейший расчет координат осуществляется компьютером. В результате, общее время картирования, с учетом подготовительных работ оператора, составит не более 10 мин. В тоже время картирование по стандартной методике составит не менее 5 часов (300 мин.) [5]. То есть экономия времени не менее 97%.
Источники информации:
1. Патент РФ 2485499, G01N33/24. Способ отбора проб для анализа почвы. / П.М. Мазуркин, С.И. Михайлова, Н.П. Тойшева, 20.06.2013.
2. Патент на полезную модель RU 186042 U1, G01N 1/02. Автоматизированный почвенный пробоотборник с дистанционным управлением. / С.В. Машков, Д.Н. Котов, Я.М. Бекетов, М.С. Котрухова, 17.01.2017.
3. Патент РФ 2102748, G01N 33/24, G01S 13/89. Усовершенствованный способ агрохимического обследования почв. / Р.А. Афанасьев, А.В. Благов, О.Н. Мейер, 20.01.1998.
4. Картирование полей [Электронный ресурс] - Режим доступа: http://egps.ru/news/kartirovanie-polei/.
5. АгроГИС - инновационный инструмент для принятия бизнес-решений в растениеводстве [Электронный ресурс] - Режим доступа: https://agrobusiness.livejournal.com/tag/gps.



Устройство магнитной стимуляции растений
Способ отжима виноградного сока и устройство для его осуществления
Устройство для магнитной стимуляции роста растений
Кормовая добавка на основе минерала каолинита для повышения резистентности и продуктивности кроликов
Секция для выращивания телят с использованием коров-кормилиц
Способ переработки животноводческих стоков
Скважинный гамма-детектор
Устройство для очистки водоемов от сине-зеленых водорослей с помощью биопрепарата
Высевающий аппарат точного высева с электронным управлением
Устройство для очистки водоемов от сине-зеленых водорослей
Турбогенератор для питания скважинной аппаратуры
Высевающий аппарат
Зерноуборочная машина
Композиция для получения сорбента на основе карбамидоформальдегидной смолы
Комбинированный почвообрабатывающе-посевной агрегат

