Результат интеллектуальной деятельности: РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА
Вид РИД
Изобретение
Изобретение относится к области робототехники, а именно к транспортным платформам сельскохозяйственных, промышленных и военных роботов-манипуляторов, роботизированных сельскохозяйственных и промышленных машинно-тракторных агрегатов, автоматических самосвалов, погрузчиков и экскаваторов, военных роботов, промышленных транспортных роботов и т.д.
Известен робототехнический комплекс, содержащий подвижный робот, пункт управления и блок вызова, расположенный в пункте управления и приспособленный для приема телефонного вызова и определения, является ли принятый вызов сигналом управления роботом, а также блок преобразования сигнала вызова, осуществляющий преобразование телефонного вызова в управляющий сигнал и его передачу на подвижной робот (RU 2320020 С1, 20.03.2008).
Недостатком этого устройства является ограниченная зона действия и узкая область применения, что обусловлено использованием для управления подвижным роботом телефонной линии.
Известно устройство управления адаптивным мобильным роботом, обладающее свойствами искусственного интеллекта и содержащее блок сенсорных датчиков, соединенных с входами блока формирования модели внешней среды, чьи выходы подключены к вычислительному блоку, соединенному с блоком исполнительных устройств, а также блок задания движения, блок задания констант, блок регулирования, блок определения координат робота и блок датчиков внутренней информации. В качестве вычислительного блока используется нейросеть, содержащая матрицу k m ключевых элементов (DE 4218599 А1, 16.12.1993, RU 2187832, 20.08.2002).
Недостатками данного устройства являются его невысокая адаптация к изменяющейся окружающей среде и к изменяющемуся внутреннему состоянию робота, а также узкая область применения.
Известен также мобильный робот, содержащий устройство для его перемещения, выполненное в виде колесного или гусеничного движителя с приводом от серводвигателей или шаговых двигателей, устройство обнаружения препятствий, управляющую часть, соединенную с устройством для перемещения мобильного робота и устройством для обнаружения препятствий и управляющую ими, устройство определения текущего местоположения мобильного робота, соединенное с управляющей частью, и источник питания. Устройство определения текущего местоположения содержит первую обзорную телекамеру для создания изображения и распознавания базового знака и первую видеоплату, обрабатывающую изображение, полученное с первой обзорной телекамеры, и передающую данные в управляющую часть. Устройство обнаружения препятствий содержит лазер, вторую обзорную телекамеру для распознавания отраженного от препятствия линейного светового пучка и вторую видеоплату для обработки видеоданных второй телекамеры. Изобретение позволяет определять местоположение робота и корректировать направление его движения при обнаружении препятствий (US 5534762 А, 09.07.1996, RU 2210492, 27.03.2003).
Недостатками данного устройства являются плохая адаптация к изменяющимся условиям окружающей среды и ограниченность числа решаемых задач из-за применения небольшого набора средств контроля окружающей обстановки и ориентации робота.
Известна роботизированная транспортная платформа содержащая самоходное управляемое транспортное средство с приводом и бортовыми источниками электропитания, пульт дистанционного управления, систему управления движением, систему связи и передачи данных, комплект функционального оборудования, систему технического зрения и приводы исполнительных механизмов. Самоходное управляемое транспортное средство имеет колесный движитель с приводом от двигателя внутреннего сгорания (ДВС). Комплект функционального оборудования выполнен в виде боевого модуля для ведения стрельбы. Электродвигатели системы управления движением платформы электрически связаны с сервоусилителями и механически с правым и левым рулевыми механизмами и коробкой переключения передач, а рычаг подачи топлива - с сервомашинкой. Система управления движением оснащена ультразвуковыми датчиками обнаружения объектов и системой топопривязки и навигации, включающей инерциальную систему ориентации в пространстве, спутниковую навигационную систему и одометры. Информационно-вычислительная система состоит из двух бортовых компьютеров и магистрально-модульной платформы, которая для выполнения вспомогательных операций оснащена аппаратурой для обеспечения резервной связи по каналам системы радиосвязи и передачи данных по основному и резервному каналам. Сервоусилители, сервомашинка, ультразвуковые датчики обнаружения объектов системы управления движением, инерциальная система ориентации в пространстве, спутниковая навигационная система и одометры системы топопривязки и навигации, бортовая аппаратура транспортного средства - тахометр и спидометр, видеокамеры системы технического зрения по каналам информационного обмена связаны с информационно-вычислительной системой. Электропитание осуществляется от автономного источника, установленного на транспортном средстве (RU 2506157 С1, 10.02.2014).
Недостатком этого устройства является пониженная надежность и невысокая подвижность, что обусловлено широким применением различных механических устройств- коробки переключения передач, механического привода колес от ДВС (механической трансмиссии), а также механически управляемых систем подачи топлива в ДВС и поворота роботизированной транспортной платформы.
Известен также наземный робототехнический комплекс, предназначенный для работы в дистанционном режиме в опасных условиях без участия человека и содержащий мобильный робот на базе роботизированной транспортной платформы и пульт управления, выполненные с возможностью радиообмена между ними, обеспечения ввода и обработки входной информации, поступающей от бортовых датчиков, вычисления текущей ориентации и местоположения мобильного робота, а также реализации на борту мобильного робота базовых алгоритмов движения в заранее неизвестной обстановке по дальнометрическому изображению внешней среды с помощью навигационно-вычислительного блока. Мобильный робот содержит подсистемы технического зрения, навигации, формирования модели внешней среды, планирования и отработки автономного целенаправленного движения, что позволяет решить задачи трехмерной визуализации мобильного робота в окружающей обстановке с наложением опасных факторов аварийной ситуации и управления мобильным роботом в автономном режиме по скорректированным при необходимости траекториям в обход обнаруженных препятствий, в том числе обеспечить его автоматический возврат в точку старта или в зону уверенного радиообмена при потере радиосвязи между пультом и мобильным роботом. При помощи специального измерительного оборудования на базе сканирующего лазерного дальномера, ультразвуковых датчиков и датчиков теплового потока робототехнический комплекс формирует на экране пульта управления упрощенную модель окружающей обстановки вокруг мобильного робота и моделирует ориентацию и положение в пространстве мобильного робота и его подвижных частей (RU 2574938 С2, 10.02.2016).
К недостаткам этого устройства относятся пониженная эффективность управления мобильным роботом, предопределяющая его невысокую маневренность и подвижность, а также пониженная надежность его работы. Обусловлено это тем, что на мобильном роботе не предусмотрены контроль его продольного и поперечного крена, защита от опрокидывания, разворот на месте, защита от повышенного буксования движителей и эффективное торможение. Реализованная на нем система технического зрения на базе сканирующего лазерного дальномера обладает невысоким быстродействием, что ограничивает допустимые величины скоростей движения и ускорений мобильного робота при его работе в стесненных условиях. Отсутствие в нем инерциальной системы ориентации не позволяет корректировать движение робота в зависимости от реальных ускорений, что также снижает эффективность управления мобильным роботом и, соответственно, его маневренность и подвижность.
Наиболее близким к предлагаемому техническому решению является базовое шасси робототехнических комплексов, предназначенных для ведения дистанционной работы в боевых условиях, реализованное в виде самодвижущейся платформы, содержащей бронированный корпус, ходовую систему с электроприводом и стойками, силовую часть и бортовой источник питания (автономный источник энергии) с ДВС. Несущий корпус платформы сварен из броневых листов и разделен внутренними переборками на четыре отделения: моторное, аппаратное, генераторное и аккумуляторное. Платформа имеет гусеничный движитель. В качестве силовой части используется смешанная силовая установка, построенная по последовательной схеме, состоящей из дизель-генератора, аккумуляторных батарей, блока контроля заряда батарей, правого и левого вентильных тяговых электродвигателей, обеспечивающих передачу крутящего момента на ведущие звездочки движителя через двухступенчатые цилиндрические редукторы, и блока управления тяговыми двигателями. Редукторы выполнены с возможностью переключения на прямую или понижающую передачу (RU 2583254 С1, 10.05.2016).
Это устройство характеризуется пониженным использованием мощности бортового источника питания и невысокой надежностью, что обусловлено применением механического переключения передач и несоответствием мощностей бортового источника питания и тяговых и тяговых электродвигателей реальной тяговой мощности, реализуемой гусеничными движителями с учетом их сцепления с грунтов (с поверхностью трассы движения).
Техническим результатом, на достижение которого направлено предлагаемое техническое решение, является максимально полное использование мощности бортового источника питания роботизированной транспортной платформы при одновременном повышении ее надежности, маневренности и подвижности.
При этом под обеспечением маневренности и подвижности платформы подразумевается решение решения совокупности задач по обеспечению повышенного тягового усилия ее движителей и предотвращения их повышенного буксования, поддержанию курсовой ориентации, обеспечению высокой скорости движения, живучести и устранению критических ситуаций, в том числе опрокидывания платформы.
Более полное использование мощности бортового источника питания позволяет снизить установленную мощность этого источника и, соответственно, уменьшить его габаритные размеры и массу, упростить размещение источника питания на платформе.
Поставленная задача решается благодаря тому, что роботизированная транспортная платформа (далее в тексте - «платформа»), приспособленная для установки на нее функционального оборудования и содержащая бортовой источник питания, выполненный в виде аккумуляторной батареи и/или двигателя внутреннего сгорания (ДВС) и соединенного с ним генератора, по меньшей мере один тяговый электродвигатель, приспособленный для преобразования электрической энергии бортового источника питания в механическую энергию и ее передачи непосредственно или через передаточные устройства на гусеницы или ведущие колеса, бортовые датчики, по меньшей мере один контроллер генератора, и/или по меньшей мере одного тягового электродвигателя, и/или ДВС, и/или функционального оборудования, цифровой вычислитель, выполненный с возможностью отслеживания окружающей обстановки и/или определения текущего местоположения платформы путем обработки выходных сигналов бортовых датчиков, а также с возможностью реализации алгоритмов движения платформы и/или работы ее функционального оборудования с соответствующим формированием сигналов управления по меньшей мере одним контроллером, причем платформа оснащена по меньшей мере одним водометным движителем и/или по меньшей мере один из тяговых электродвигателей выполнен индукторным реактивным с самовозбуждением или с поперечным магнитным потоком.
В частных случаях реализации платформы:
- тяговые электродвигатели реализованы с механической характеристикой, у которой крутящий момент имеет величину, достаточную для реализации тягового усилия платформы, максимально возможного по сцеплению гусениц или ведущих колес с грунтом (с поверхностью трассы движения), в диапазоне угловых скоростей ротора от нуля и не менее, чем до 20% его максимального значения;
- платформа содержит электрически управляемый стояночный тормоз, управление которым осуществляется контроллером тягового электродвигателя и/или цифровым вычислителем из условия обеспечения его включенного состояния после остановки платформы;
- платформа дополнительно содержит емкостный или инерциальный накопитель энергии;
- реализовано рекуперативное торможение и остановка платформы тяговыми электродвигателями без применения фрикционных рабочих тормозов с передачей энергии торможения в бортовой источник питания и/или в накопитель энергии;
- водометный движитель механически соединен с тяговым электродвигателем или с дополнительно установленным электродвигателем водометного движителя с помощью редуктора, и/или карданного вала, и/или муфты с механическим, электромеханическим или электрогидравлическим управлением;
- цифровой вычислитель оснащен энергонезависимой памятью, в которую записана трехмерная карта местности, по которой движется платформа, и реализует отслеживание окружающей обстановки и/или определяет текущее местоположение платформы путем сопоставления выходных сигналов бортовых датчиков или результатов их обработки, представленных в виде реконструкции окружающей обстановки, с данными трехмерной карты местности;
- в состав бортовых датчиков входят датчики ультразвуковой, и/или стерео-визуальной, и/или радиолокационной навигации, а цифровой вычислитель производит обработку их выходных сигналов в режиме реального времени и осуществляет трехмерную реконструкции окружающей обстановки, выявляет препятствия для движения платформы, а также определяет текущее местоположение платформы путем сопоставления трехмерной реконструкции окружающей обстановки с трехмерной картой местности, предварительно записанной в его энергонезависимой памяти;
- в состав бортовых датчиков входят датчики ультразвуковой, и/или стерео-визуальной, и/или радиолокационной, и/или магнитометрической, и/или курсо-одометрической, и/или бесплатформенной инерциальной, и/или глобальной спутниковой навигации, а цифровой вычислитель реализует отслеживание окружающей обстановки и/или определение местоположения платформы путем обработки выходных сигналов указанных навигационных датчиков и комплексирования результатов этой обработки по алгоритму, базирующемуся, на фильтре Калмана;
- в состав бортовых датчиков входят датчики инерциальной навигации и курсо-одометрические датчики, а цифровой вычислитель определяет величину буксования гусениц или ведущих колес и последующую коррекцию результатов обработки датчиков инерциальной навигации в зависимости от величины этого буксования, которая определяется путем сопоставления текущей величины тягового усилия, определяемого путем обработки текущих значений рабочих параметров платформы, с тяговым усилием, максимально возможным по сцеплению этих гусениц или колес с поверхностью грунта или трассы движения;
- платформа содержит средство связи с постом дистанционного управления по радиоканалу и/или по оптоволоконному кабелю, а цифровой вычислитель в зависимости от наличия или отсутствия принимаемых сигналов дистанционного управления и от информации, содержащейся в этих сигналах, формирует сигналы управления по меньшей мере одним контроллером из условия движения платформы в заданном направлении, или по заданному маршруту, или в обратном направлении по ранее пройденному пути;
- платформа приспособлена для установки на нее функционального оборудования, выполненного в виде манипулятора, или транспортера, или грузоподъемного оборудования, или комплекта вооружения, боевого модуля, или минного трала, или пусковой реактивной установки разминирования, или оборудования для тушения пожаров, или грузовой платформы с устройством погрузки-выгрузки и/или обработки продукции, или лебедки, или рабочих органов, приспособленных для воздействия на почву или на грунт, или для посадки и сбора сельскохозяйственной продукции, или для копания и перемещения грунта.
Указанные альтернативные отличительные признаки как независимого, так и зависимых пунктов формулы изобретения, находятся в прямой причинно-следственной связи с достигаемым техническим результатом, поскольку их реализация обеспечивает создание платформы, характеризующейся эффективным использованием мощности бортового источника питания и повышенной надежностью, маневренностью и подвижностью.
В том числе, оснащение платформы водометными движителями (водометами) обеспечивает более эффективное использование бортового источника питания при движении платформы по воде, поскольку движение по воде за счет перематывания гусениц или вращения колес обеспечивает недостаточную передачу мощности бортового источника питания на эти гусеницы или колеса. Кроме того, водометы как бы «присасывают» платформу к воде, за счет чего повышается ее устойчивость при резких виражах на высокой скорости. В сочетании с более высоким тяговым усилием водометов это обеспечивает повышенную маневренность и подвижность платформы при ее движении по воде.
Водометы, по сравнению с гусеничными движителями, имеют значительно более простую конструкцию, что обеспечивает более высокую надежность работы платформы в режиме преодоления водных преград.
Реализация отличительного признака, характеризующегося применением в качестве тяговых электродвигателей индукторных реактивных электродвигателей с самовозбуждением или электродвигателей с поперечным магнитным потоком обеспечивает улучшение использования мощности бортового источника питания, а также повышение маневренности и подвижности платформы за счет того, что применение этих типов тяговых электродвигателей обеспечивает реализацию тягового усилия гусениц или колес, максимально возможного по сцеплению с грунтом (с поверхностью трассы движения), в более широком диапазоне угловой скорости электродвигателей и, соответственно, скорости движения платформы. Максимально полное использование сцепного веса платформы обеспечивает достижение максимально возможных ускорений разгона/торможения и поворота платформы, что позволяет наиболее полно и эффективно использовать мощность бортового источника питания и получить максимально высокую маневренность и подвижность платформы.
Одновременно достигается повышение надежности работы платформы за счет того, что максимальный выходной момент на ведущей звездочке или ведущем колесе платформы обеспечивает возможность реализации тягового усилия, превышающего максимально возможное тяговое усилие по сцеплению с грунтом. Соответственно, буксование гусениц или ведущих колес ограничивает нагрузки в трансмиссии, повышая надежность работы платформы. Кроме того, к повышению надежности платформы приводит простота конструкции индукторных реактивных двигателей, не имеющих обмоток и постоянных магнитов на роторе, а также простота электродвигателей с поперечным магнитным потоком, имеющих в каждой фазе одну кольцевую катушку.
Реализация следующего отличительного признака, предусматривающего возможность рабочего торможения платформы тяговыми электродвигателями без применения фрикционных рабочих тормозов, позволяет повысить эффективность управления движением платформы и, соответственно, обеспечить более полное использование мощности бортового источника питания и повысить ее маневренность и подвижность, за счет более плавных регулировочных характеристик тяговых электродвигателей по сравнению с характеристиками фрикционных тормозов. Одновременно обеспечивается повышение надежности платформы за счет упрощения ее конструкции - исключения необходимости применения фрикционных тормозов.
Реализация отличительного признака, заключающегося в применении электрически управляемых стояночных тормозов, позволяет повысить эффективность использования бортового источника питания, надежность, маневренность и подвижность платформы при ее работе на склонах. Это достигается за счет того, что автоматическое включение тормозов после остановки платформы позволяет осуществлять управление ее движением без учета возможности ее скатывания под уклон. Одновременно это обеспечивает повышение безопасности работы платформы на склонах.
Применение емкостного или инерциального накопителя энергии в качестве дополнения к генератору и/или аккумуляторной батарее позволяет в динамических режимах работы платформы кратковременно повысить суммарную мощность тяговых электродвигателей до уровня, превышающего среднее значение выходной мощности бортового источника питания, а также обеспечить передачу энергии бортового источника питания в емкостный или инерциальный накопитель энергии в те интервалы времени, когда тяговые электродвигатели недогружены. Одновременно это позволяет увеличить средние значения тяговое усилия и мощности, передаваемой на гусеницы или ведущие колеса. Поэтому реализация указанного отличительного альтернативного признака также приводит к улучшению использования бортового источника питания и повышению маневренности и подвижности платформы. При этом снижение пиковых значений мощности, потребляемой от бортового источника питания, приводит к повышению надежности платформы.
Внесение в энергонезависимую память цифрового вычислителя трехмерной карты местности, по которой осуществляется движение платформы, и управление этим движением с учетом результатов сопоставления этой карты с трехмерным отображением окружающей обстановки, реконструируемой цифровым вычислителем, позволяет повысить эффективность использования бортового источника питания, маневренность, подвижность и надежность работы платформы за счет повышения точности и быстродействия управления платформой, что достигается за счет повышения точности и оперативности отслеживания окружающей обстановки и определения текущего местоположения платформы. Обусловлено это высокой эффективностью использования априорно известной картографической информации в условиях ограниченного быстродействия и относительно невысокой разрешающей способности бортовых датчиков, а также ограниченных ресурсов цифрового вычислителя.
Коррекция результатов инерциальной навигации в зависимости от величин буксования и теоретической скорости движения платформы (одометрической информации), реализованное в соответствии со следующими альтернативными признаками изобретения, также позволяет повысить эффективность использования бортового источника питания, маневренность, подвижность и надежность работы платформы за счет повышения точности и быстродействия управления платформой. Достигается это за счет эффективного устранения дрейфа интеграторов инерциальной навигации, реализуемого цифровым вычислителем. Повышение точности инерциальной навигации и, соответственно, точности определения местоположения платформы, повышает эффективность управления платформой и ее маневренность и подвижность, особенно при работе в стесненных условиях. Простота реализации этого технического решения приводит к повышению надежности работы платформы.
К этому же результату приводит использование цифровым вычислителем трехмерной карты поверхности, по которой осуществляется движение платформы, предварительно записанной в его энергонезависимую память, а также бортовых датчиков продольного и/или поперечного наклона и скорости движения платформы, предложенное в следующем альтернативном варианте ее реализации. В этом случае цифровой вычислитель имеет возможность прогнозировать величины продольного и поперечного наклона платформы на следующем участке трассы ее движения. Это позволяет повысить эффективность управления движением платформы, в том числе ее маневренность и подвижность, за счет увеличения скорости движения с соответствующим повышением использования бортового источника питания, а так же повысить надежность работы платформы за счет предотвращения перегрузок ее ходовой части и трансмиссии. Например, обеспечивается возможность повысить тяговую мощность (скорость движения и тяговое усилие движителей) или уменьшить радиусы поворота платформы, если это позволяют априорно известные параметры трассы движения.
В роботизированной транспортной платформе может быть реализован как один из указанных альтернативных отличительных признаков независимого пункта формулы изобретения, так и одновременно несколько отличительных признаков в их любом сочетании, причем от количества реализованных отличительных признаков зависит уровень достижения указанного технического результата.
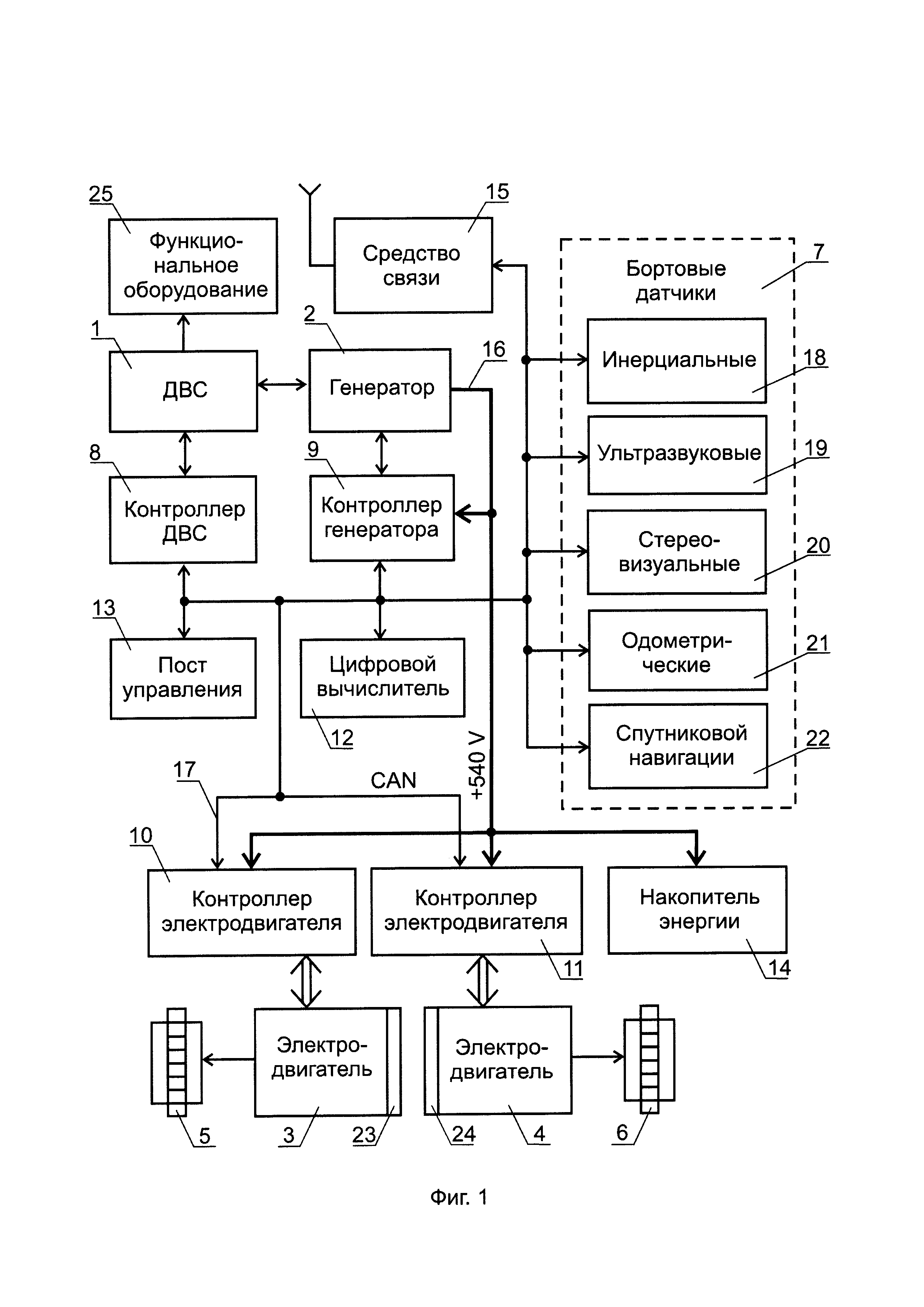
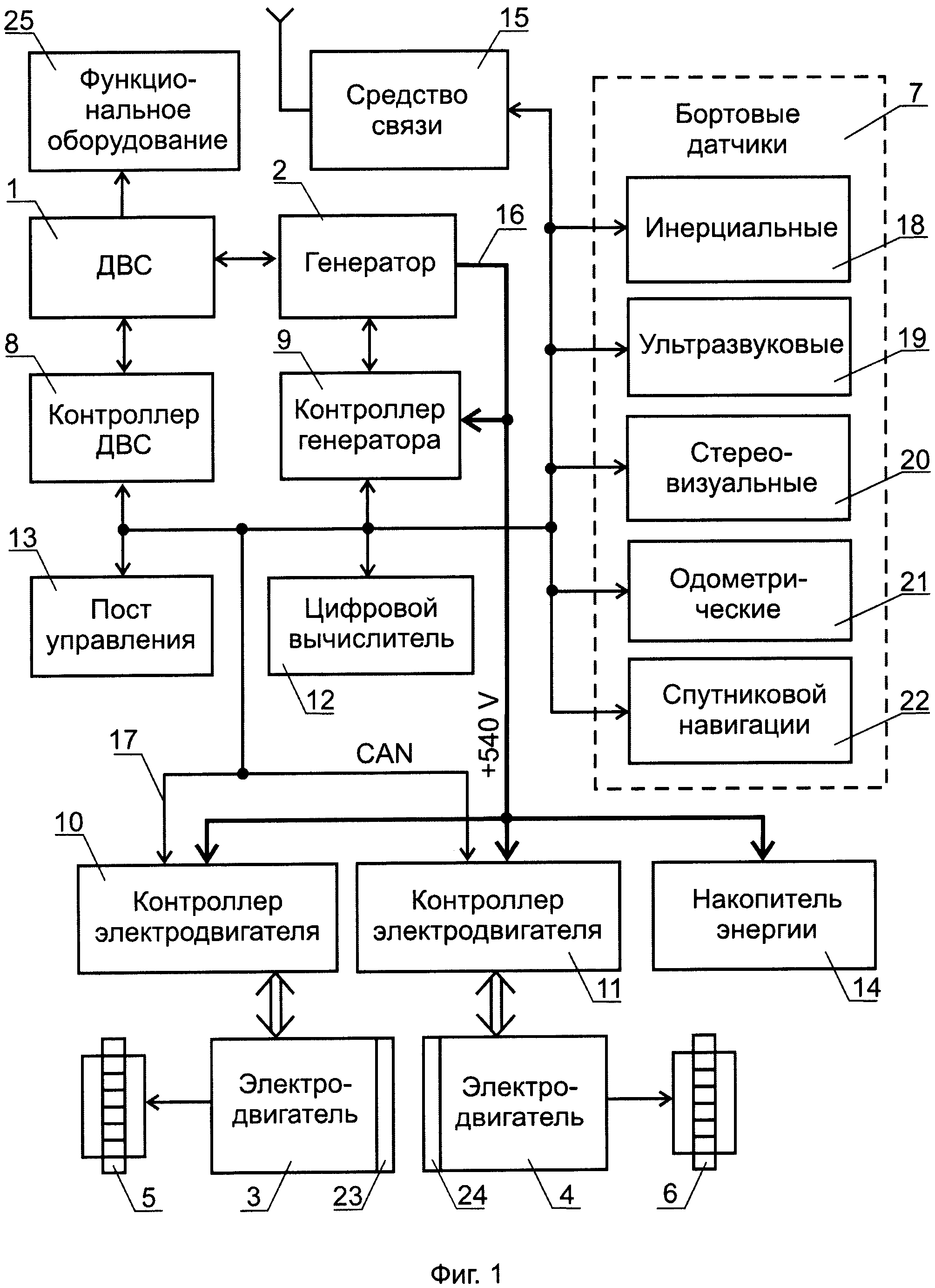
Для пояснения технической сущности, принципа действия и возможности осуществления предложенного устройства на фиг. 1 в качестве примера показана функциональная схема платформы. На фиг. 2 - механические характеристики ее тяговых электродвигателей.
Роботизированная транспортная платформа, приспособленная для установки на нее функционального оборудования, содержит бортовой источник питания, выполненный в виде аккумуляторной батареи и/или двигателя внутреннего сгорания (ДВС) 1, с которым непосредственно или через согласующее устройство (мультипликатор, упругую муфту и т.п.) соединен генератор 2, а также тяговые электродвигатели 3, 4, соединенные с ведущими звездочками 5, 6 гусеничной платформы или ведущими колесами колесной платформы, бортовые датчики 7, контроллер 8 ДВС 1, контроллер 9 генератора, контроллеры 10, 11 тяговых электродвигателей и цифровой вычислитель (контроллер верхнего уровня) 12.
В состав платформы могут входить также пост управления 13, емкостный или инерциальный накопитель энергии 14, реализованный, соответственно, на основе конденсаторов или вращающегося маховика, а также средство связи (приемопередатчик) по радиоканалу или по оптоволоконному кабелю 15 и другие функциональные устройства, условно не показанные на чертеже.
В приведенном примере используется последовательная кинематическая схема моторно-трансмиссионной установки платформы, которая исключает механическую связь ДВС с гусеничным или колесным движителем.
Тяговые электродвигатели 3, 4 могут быть встроены в ступицы ведущих колес или размещены внутри обвода гусениц и соединены с ведущими звездочками 5, 6 платформы, либо размещены в корпусе платформы и соединены с ними через передаточные устройства (бортовые редукторы, карданные валы, муфты и т.п.).
Возможна реализация платформы с одним тяговым электродвигателем. В этом случае передаточные устройства, с помощью которых осуществляется передача механической энергии от тягового электродвигателя на ведущие колеса или гусеницы, кроме бортовых редукторов содержат главную передачу с бортовыми фрикционами и тормозами, либо с дифференциальным механизмом, обеспечивающим возможность поворота платформы.
Электрическая часть платформы, которая может именоваться также системой контроля, защиты и управления, системой электрооборудования и т.д., в общем случае включает в себя высоковольтную и низковольтную части этой системы. Ее информационную основу составляет цифровой вычислитель 12, который может именоваться также контроллером верхнего уровня, блоком управления, бортовой ЭВМ, информационно-управляющим блоком и т.п.
Контроллеры (электронные микропроцессорные контроллеры) 10-12, преимущественно микропроцессорные, могут именоваться также блоками управления, управляющими устройствами, блоками входов и нагрузок, информационно-управляющими блоками или устройствами и т.д. Контроллеры генератора и тяговых электродвигателей могут именоваться также силовыми преобразователями, инверторами и т.д. В их состав в общем случае входят силовые электронные ключи, драйверы этих ключей, микроконтроллеры и интерфейсные схемы, обеспечивающие согласование входных/выходных цепей микроконтроллеров с линиями связи и, в случае необходимости, с бортовыми датчиками 7.
Конструкция контроллера 9 тягового генератора 2 зависит от конструкции генератора. В случае применения синхронного генератора с постоянными магнитами на роторе он может быть выполнен с виде силового управляемого или неуправляемого выпрямителя. В этом случае контроллер 9 осуществляет преобразование переменного выходного напряжения тягового генератора 2 в постоянное напряжение силовых шин 16, например, с номинальным напряжением 540 В.
Контроллер 9 тягового генератора 2 может также обеспечивать коммутацию его обмоток при работе в режиме электродвигателя при запуске ДВС 1 и при торможении платформы двигателем.
Контроллеры 10 и 11 тяговых электродвигателей предназначены для преобразования постоянного напряжения бортового источника питания (напряжения на силовых шинах 16) в переменное напряжение или в однополярные импульсы, которые поступают на фазные обмотки тяговых электродвигателей 3, 4. Они содержат силовые электронные ключи, выполненные, преимущественно на биполярных транзисторах с изолированным затвором (БТИЗ, IGBT) или в виде модулей, реализованных на основе IGBT (БТИЗ) транзисторов, гальванически развязанные драйверы этих транзисторов (модулей), микроконтроллеры или цифровые сигнальные процессоры, а также интерфейсные устройства, приспособленные для управления силовыми электронными ключами и для обмена информацией между контроллерами 8-11, постом управления (панелью оператора) 13 и бортовыми датчиками 7.
Для каждого тягового электродвигателя может устанавливаться отдельный контроллер (инвертор, преобразователь, коммутатор) 10, 11. Возможна также установка нескольких контроллеров на один тяговый электродвигатель, например, при дроблении мощности по секциям статора тягового электродвигателя, либо установка общего контроллера на два тяговых электродвигателя.
Для управления функциональным оборудованием платформы может использоваться любой из контроллеров 10-12, либо отдельный контроллер функционального оборудования, в том числе встроенный в это функциональное оборудование.
В зависимости от выполняемых функций и требований к компоновке машины возможно объединение контроллеров 8-11 и цифрового вычислителя 12 в единый блок (контроллер, модуль) или их раздельное исполнение. Возможно также конструктивное объединение контроллера генератора (силового выпрямителя) 9 с генератором 2, а контроллеров (силовых преобразователей) 10, 11 - с тяговыми электродвигателями 3, 4.
Линии передачи информационных сигналов между контроллерами 8-11, цифровым вычислителем 12, бортовыми датчиками 7, постом ручного управления 13 и средством связи 15 могут быть выполнены с использованием стандарта промышленной сети CAN (Controller Area Network - сеть контроллеров) 17, ориентированной на объединение в единую сеть различных устройств с использованием последовательного, широковещательного и пакетного режимов передачи. Возможно применение интерфейсов LIN (Local Interconnection Network), RS-485 (стандарт EIA/TIA) и т.д., а также беспроводных интерфейсов типа ZigBee (стандарт IEEE 802.15.4), Wi-Fi (стандарт IEEE 802.11), Bluetooth (стандарт IEEE 802.15.1) и т.п. Возможно также соединение отдельных функциональных узлов платформы, в том числе их подключение к цифровому вычислителю 12 и к бортовым датчикам 7, с помощью отдельных проводов.
Пост ручного управления 13 может быть выполнен в виде отдельного блока или совмещен с цифровым вычислителем 12 или одним из контроллеров. Он может именоваться также панелью, пультом или рабочим местом оператора, панелью контрольно-измерительных приборов, комбинацией приборов, блоком индикации, блоком отображения информации и т.п. В общем случае он содержит аппарат управления движением платформы (джойстик, рулевое колесо и т.п.), ключ запуска ДВС, клавишные и кнопочные переключатели, рукоятку управления подачей топлива, педали тормоза и акселератора или десселератора, символьные и графические устройства индикации, набор электромеханических указателей, световые или звуковые сигнализаторы, а также средства ввода/вывода информации (разъемы, бесконтактные считыватели и т.п.), соединенные с шиной CAN 17.
Платформа может быть оснащена водометными движителями (водометами), имеющими привод от тяговых электродвигателей 3, 4, либо от дополнительно установленных электродвигателей. Их механическое соединение электродвигателями осуществляется с помощью редукторов, карданных валов, муфт с механическим, электромеханическим или электрогидравлическим управлением и т.п., либо их сочетания.
В состав бортовых датчиков 7 могут входить инерциальные (акселерометры и гироскопы бесплатформенной системы инерциальной навигации) 18, ультразвуковые 19, стерео-визуальные (черно-белые, цветные или инфракрасные видеокамеры) 20, механические или оптические курсо-одометрические 21, радиолокационные, магнитометрические датчики, датчики продольного и поперечного крена платформы, датчики (приемники) глобальной спутниковой навигации (Global Navigation Satellite Systems) 22 - ГЛОНАСС, GPS (NAVSTAR), DORIS, BeiDou, Galileo и т.п., а также датчики рабочих параметров ДВС 1, генератора 2, тяговых электродвигателей 3, 4 и функционального оборудования 25.
Ультразвуковые датчики 19, предназначенные для работы в воздушной среде, могут быть выполнены в виде матрицы акустических преобразователей. Это дает возможность использовать эти датчики для реконструкции окружающей обстановки в виде ее трехмерного акустического образа.
Каждый датчик может содержать встроенный микроконтроллер или цифровой сигнальный процессор, осуществляющий первичную обработку выходных сигналов его первичного преобразователя. Возможно также объединение нескольких датчиков в единый многофункциональный датчик. Например, магнитометрические датчики могут быть объединены с инерциальными микромеханическими датчиками и реализованы на основе одной микросхемы.
Тяговые электродвигатели могут иметь любую конструкцию. Предпочтительно применение реактивных индукторных электродвигателей с самовозбуждением, либо электродвигателей с поперечным магнитным потоком.
Вентильный индукторный реактивный двигатель (ВРД, ВИД, ВИРД), а в англоязычной литературе - электродвигатель с переменным магнитным сопротивлением: «Switched Reluctance Motor (SRM)», содержит статор без обмотки возбуждения с полюсами и фазными обмотками, выполненными в виде сосредоточенных катушек, размещенных на полюсах шихтованного магнитопровода статора, и ротор без обмотки и постоянных магнитов с зубчатым магнитопроводом, также выполненным из листов электротехнической стали и закрепленным на его валу.
Электродвигатель (электрическая машина) с поперечным магнитным потоком, в англоязычной литературе - Transverse Flux Machine (TFM) или Flux Concentrated Permanent Magnet (FCPM-TFM), может именоваться также машиной с коммутируемым магнитным потоком; модулируемой полюсной машиной, реактивным индукторным электродвигателем с аксиальным магнитным потоком; реактивным электродвигателем с поперечным магнитным потоком, именуемым в англоязычной литературе - Transverse Flux Reluctance Motor (TFRM), Transverse Flux Switched Reluctance Motor (TFSRM) и т.п.Он содержит безобмоточный явнополюсный ротор, закрепленный на оси вращения, и статор по меньшей мере с одной кольцевой фазной обмоткой, расположенной концентрично оси вращения ротора и охваченной по меньшей мере одним сердечником статора. Полюса статора обращены к ротору и отделены от него воздушным зазором. Такой тяговый электродвигатель может иметь ротор как с постоянными магнитами, так и без них.
Тяговый электродвигатель, независимо от его типа, может быть выполнен с внутренним, внешним или дисковым (торцевым) ротором.
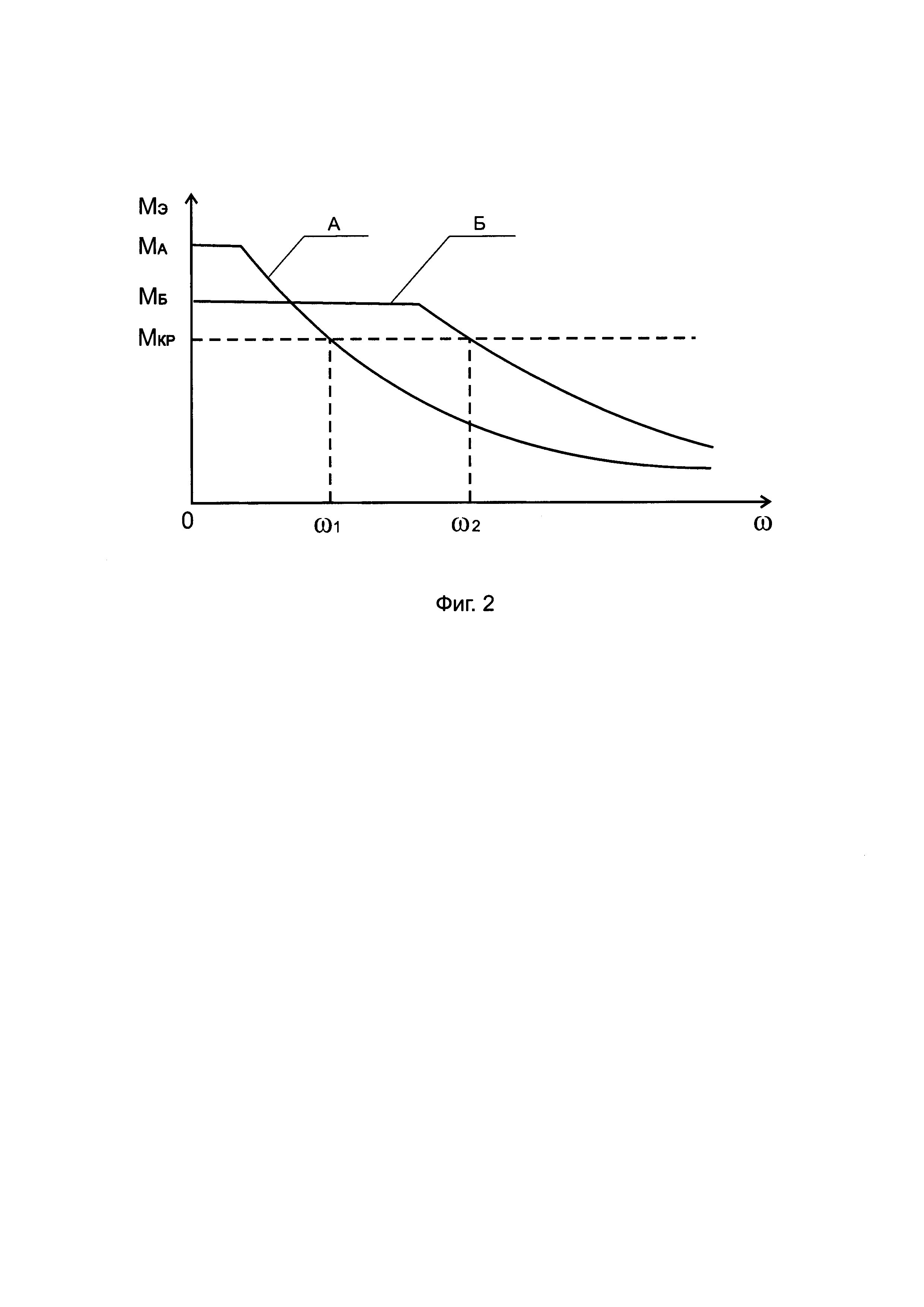
Отличительной особенностью механической характеристики тяговых электродвигателей, использующихся в предложенной платформе, является расширенный диапазон угловых скоростей ротора, в котором вращающий момент электродвигателя обеспечивает реализацию тягового усилия гусеницы или ведущего колеса, максимально возможного по сцеплению с грунтом (с поверхностью трассы движения). В частности, тяговые электродвигатели характеризуются постоянством их вращающего момента в диапазоне угловых скоростей от нуля и не менее, чем до 20% максимальной скорости вращения его ротора.
В реактивных индукторных электродвигателях (SRM) это достигается путем уменьшения числа витков в фазных обмотках при одновременном повышения величины тока в них. Для обеспечения такой возможности контроллеры 10, 11 тяговых электродвигателей содержат сильноточные силовые ключи, работающие в режиме широтно-импульсной модуляции.
В тяговых электродвигателях с поперечным магнитным потоком (TFM) это обеспечивается за счет создания вращающего момента электродвигателя множеством одновременно работающих полюсов статора и ротора.
Для торможения платформы в условиях отсутствия на ней фрикционных рабочих тормозов тяговые электродвигатели 3, 4 выполнены с возможностью рекуперативного торможения с передачей энергии на силовые шины 16 и далее в бортовой источник питания (в аккумуляторную батарею и/или в ДВС 1), в емкостный или инерциальный накопитель энергии 14, и/или, в случае необходимости, в тормозной резистор.
Тяговые электродвигатели 3, 4 могут содержать электромагнитные или гидравлические управляемые нормально замкнутые стояночные тормоза 23, 24, либо эти тормоза могут быть соединены с передаточными устройствами гусениц или колес 5, 6, например, со входными валами бортовых редукторов. Возможно применение бортовых редукторов со встроенными стояночными тормозами
Генератор 2 может иметь конструкцию, аналогичную тяговым электродвигателям 3, 4, или отличающуюся от них.
К силовым шинам постоянного тока 16 может быть подключена аккумуляторная батарея, емкостный или инерциальный накопитель энергии 14, а также последовательно соединенные тормозной резистор и силовой ключ, обеспечивающий подключение тормозного резистора к силовым шинам 16 в случае, если напряжение на них превышает максимально допустимую величину.
Функциональное оборудование 25 может быть самым разнообразным и может именоваться рабочим оборудованием, полезной нагрузкой, рабочим органом, навесным оборудованием и т.п.Оно выполнено, в частности, в виде манипулятора, рабочих органов, приспособленных для воздействия на почву, посадки и сбора сельскохозяйственной продукции, для копания и перемещения грунта, в виде транспортера для перемещения продукции от рабочих органов к агрегатным отсекам. Возможна также его реализация в виде грузоподъемного оборудования, комплекта вооружения, боевого модуля, устройства разминирования (минного трала), пусковой реактивной установки разминирования, оборудования для тушения пожаров, грузовой платформы с устройством погрузки-выгрузки и/или обработки продукции, лебедки и т.п.
Функциональное оборудование 25 может иметь механические, электромеханические, электрогидравлические или электропневматические приводы, в том числе привод от ДВС (показан на фиг. 1), датчики его состояния и режимов работы, а также контроллер функционального оборудования, соединенный с силовыми шинами 16 и с цифровым вычислителем 12 по шине CAN 17.
Предложенная роботизированная транспортная платформа работает следующим образом.
Первичным источником энергии для движения платформы и для работы ее функционального оборудования 25 является бортовой источник энергии.
Ведущим устройством платформы является цифровой вычислитель (контроллер верхнего уровня) 12, реализованный, например, на основе цифрового сигнального процессора, работающего по программе, предварительно записанной в его энергонезависимую память. Цифровой вычислитель 12 координирует работу всех составных частей платформы, осуществляя информационное взаимодействие с ними по шине CAN 16.
Сигнал начала движения платформы может поступить либо с поста дистанционного управления по радиоканалу или по оптоволоконному кабелю через средство связи 25, либо с поста ручного управления 13.
Далее цифровой вычислитель (контроллер верхнего уровня) 12 отслеживает окружающую обстановку и определяет местоположения платформы путем обработки выходных сигналов бортовых навигационных датчиков 7 и комплексирования результатов этой обработки по алгоритму, базирующемуся, как правило, на фильтре Калмана. После этого цифровой вычислитель 12 формирует сигналы управления контроллерами 8-11, обеспечивая движение платформы по заданному маршруту или в заданный конечный пункт с обходом выявленных препятствий. Задание этого маршрута или конечного пункта осуществляется в геофизической системе координат.
Координаты начального пункта движения платформы определяются цифровым вычислителем с помощью бортовых датчиков 7, например, датчиков спутниковой навигации 22 и магнитометрических датчиков, либо вводятся в энергонезависимую память цифрового вычислителя 12 с поста ручного 13 или дистанционного управления.
Аналогичным образом, в зависимости от варианта реализации платформы, в эту энергонезависимую память записывается трехмерная карта местности, по которой осуществляется движение платформы, трехмерная карта поверхности трассы движения, а также значения параметров окружающей среды и/или параметров движения платформы, полученные во время предыдущего движения этой или другой платформы по тому маршруту, по которому планируется движение. В указанную память цифрового вычислителя 12 могут быть также записано ультразвуковое, оптическое и/или радиолокационное изображения по меньшей мере одной конечной и/или промежуточной точки траектории движения платформы. Указанная запись может осуществляться с мобильного носителя информации, например с USB-флеш-накопителя, по радиоканалу или по оптоволоконному кабелю (через средство связи 25), либо путем его подключения к разъему USB, расположенному на панели поста ручного управления 13.
В процессе движения платформы цифровой вычислитель 12 осуществляет отслеживание окружающей обстановки с помощью стерео-визуальных датчиков (стерео-камер) 20 путем вычисления глубины отдельных точек изображения (объектов) для различных моментов движения платформы. Эти точки выбираются, в частности, путем реализации алгоритма обнаружения устойчивых признаков изображения. В предположении, что в течение коротких интервалов времени объекты изображения неподвижны, с использованием метода наименьших квадратов вычисляются их угловые и позиционные параметры.
Данный подход позволяет цифровому вычислителю 12 осуществить трехмерную реконструкцию окружающей обстановки (окружающего пространства) и далее с ее использованием выявить препятствия, которые должна обходить платформа в процессе своего движения.
Аналогичный подход, в зависимости от вариантов реализации платформы, может быть реализован с использованием ультразвуковых 19 или радиолокационных датчиков.
Текущее местоположение платформы цифровой вычислитель 12 определяет путем сопоставления трехмерной реконструкции окружающей обстановки с трехмерной картой местности, трехмерной картой поверхности движения, а также с изображениями конечной и промежуточной точек траектории движения платформы.
После выявления препятствий и определения текущего местоположения платформы цифровой вычислитель 12 формирует сигналы управления контроллерами 8-11, обеспечивая движение платформы по намеченному маршруту или к заданной конечной точке траектории ее движения в обход существующих препятствий.
Причем движение осуществляется как по грунтовой поверхности с помощью гусениц или колес, так и по воде с помощью водометных движителей.
С целью наиболее полного использования мощности бортового источника питания платформы при одновременном повышении ее надежности, маневренности и подвижности платформы за счет более точного и более оперативного управления этой платформой, осуществляется комплексирование информации различных систем определения местоположения платформы (счисления пути). В дополнение к описанной системе ориентации (определения местоположения) платформы, базирующейся на трехмерной реконструкции окружающей обстановки и ее сопоставлении с информацией, предварительно внесенной в энергонезависимую память цифрового вычислителя 12, могут использоваться курсо-одометрическая, бесплатформенная инерциальная навигационная система, а также глобальная спутниковая навигационная система, реализованные с помощью бортовых датчиков 18, 21, 22.
Различные навигационные системы могут взаимодействовать между собой. Например, для коррекции выходных сигналов бесплатформенной инерциальной навигационной системы (результатов обработки инерциальных датчиков 18) могут использоваться курсо-одометрические датчики 21. В этом случае цифровой вычислитель 12 определяет величину тягового усилия, создаваемого гусеницами или ведущими колесами и вычисляет буксование гусениц или ведущих колес путем сопоставления величины этого тягового усилия с тяговым усилием, максимально возможным по сцеплению этих гусениц или колес с поверхностью трассы движения. Далее, на основании угловой скорости вращения роторов тяговых электродвигателей 10, 11 или скорости вращения ведущей звездочки (ведущего колеса) и величины буксования, определяется действительное перемещение платформы, которое используется для коррекции интеграторов инерциальной системы навигации.
Отслеживание окружающей обстановки может также осуществляться с использованием сканирующего лазерного, ультразвукового или радиолокационного (микроволнового) дальномера, позволяющего решить задачу определения геометрических параметров окружающего пространства вокруг платформы в процессе ее движения. В этом случае цифровой вычислитель 12 производит обработку данных, поступающих от дальномера. Далее с использованием полученной информации решается задача трехмерной реконструкции (построения) окружающей обстановки и/или поверхности, по которой движется платформа.
Массив данных об этой реконструкции, полученных любым из указанных способов, дополняется данными о пути, пройденном от начала движения, полученными с бортовых датчиков 7, данными о продольном и поперечном крене (наклоне) платформы, а также данными о геофизических координатах платформы, полученных с помощью инерциальной, одометрической, спутниковой навигационных систем, либо комбинацией этих данных, сформированных по заранее определенному алгоритму, записанному в энергонезависимую память цифрового вычислителя 12. В дальнейшем в процессе движения платформы отдельные фрагменты трехмерной реконструкции окружающей обстановки собираются в объединенную трехмерную модель больших областей внешней среды.
Реальная ситуация во внешней среде с течением времени меняется. Эти изменения выявляются в процессе движения платформы, преобразуются из подвижной системы координат, связанной с платформой, в неподвижную геофизическую систему координат и далее используются цифровым вычислителем 12 для уточнения трехмерной реконструкции окружающей обстановки.
Окончательно сформированный массив информации используется цифровым вычислителем 12 для формирования сигналов управления контроллерами 8-11 и, соответственно, движением и функциональным оборудованием платформы, а также может быть записан на внешнее запоминающее устройство и использован при повторном движении платформы по этому же маршруту, либо при работе другой платформы.
Используя сформированную реконструкцию окружающей обстановки и информацию о местонахождении в ней платформы, цифровой вычислитель 12 формирует целенаправленную безопасную траекторию движения платформы и обеспечивает ее удержание на заданном курсе. В случае невозможности достижения заданной конечной точки траектории движения осуществляется переход на дистанционное управление. Причем, в случае потери радиосвязи между платформой (средством связи 15) и постом дистанционного управления, осуществляют автоматический возврат платформы в начальную точку движения или ее переход в зону уверенного приема радиосигналов управления, причем также в обход обнаруживаемых препятствий.
Для достижения наиболее полного использования мощности бортового источника питания платформы, а также для повышения ее надежности, высокой маневренности и подвижности, необходимо не только предоставить цифровому вычислителю 12 достаточно полную и достоверную информацию об окружающей обстановке и параметрах движения платформы путем реализации описанных технических решений, но обеспечить максимально высокие значения тягового усилия создаваемого гусеницами, ведущими колесами или водометными движителями, поскольку тяговую мощность при заданной скорости движения платформы определяет именно тяговое усилие.
Особенно важное значение это имеет при работе платформы на склонах и на грунтах с повышенными значениями сопротивления передвижению - глубокий снег, заболоченная местность, сухой песок и т.п.
Тяговое усилие, в свою очередь, ограничивается мощностью бортового источника питания за вычетом потерь в тяговых электродвигателях, либо мощностью самих тяговых электродвигателей, либо сцеплением гусениц или ведущих колес с грунтом (почвой, поверхностью дороги).
Для снижения негативного влияния недостатка мощности бортового источника питания на величину тягового усилия и, соответственно, для максимального полного использования этой мощности при одновременном повышении маневренности, подвижности и надежности работы платформы, можно использовать индукторные реактивные электродвигатели (SRM), обладающие расширенным диапазоном скоростей, в котором они имеют постоянную мощность, либо тяговые электродвигатели с поперечным магнитным потоком (TFM), имеющие большой запас по крутящему моменту. С этой же целью дополнительно устанавливается емкостный или кинетический накопитель энергии 14, позволяющий кратковременно получить высокую тяговую мощность, передаваемую на гусеницы, ведущие колеса или водометные движители.
Для обеспечения тягового усилия, максимально возможного по сцеплению гусениц или ведущих колес с грунтом (почвой, поверхностью дороги) в широком диапазоне скоростей движения платформы, необходима реализация тяговых электродвигателей, которые позволяют наиболее полно реализовать это требование.
На фиг. 2 кривой «А» показана типовая механическая характеристика МЭ(ω) индукторного реактивного тягового электродвигателя.
Известно, что крутящий момент тягового электродвигателя однозначно определяет тяговое усилие гусеницы или ведущего колеса, с которым он соединен
FT=МЭ⋅iБР⋅ηБР/rвк,
где iБР и ηБР - передаточное отношение и КПД механизма (бортового редуктора), соединяющего ротор тягового электродвигателя с ведущей звездочкой или ведущим колесом платформы; rВК - радиус этой ведущей звездочки или ведущего колеса.
Максимально возможное по сцеплению тяговое усилие гусеницы или ведущего колеса FКР определяется частью веса платформы, приходящейся на эту гусеницу или колесо, и коэффициентом сцепления с грунтом (почвой, дорогой)
Fкр=M⋅ϕкр
Из фиг. 2 следует, что традиционный индукторный реактивный тяговый электродвигатель при малых угловых скоростях ротора (при малых скоростях движения платформы) имеет крутящий момент МА, обеспечивающий тяговое усилие гусеницы или ведущего колеса FТ, значительно превышающее максимально возможное по сцеплению
МА>>Мкр
Соответственно, FТ>>Fкр.
Это приводит к буксованию гусениц или ведущих колес и к нерациональном использованию энергии бортового источника питания.
При частоте вращения ω1 (см. фиг. 2) МА=Мкр и, соответственно, FТ=Fкр. При дальнейшем увеличении скорости вращения ротора тягового электродвигателя (ω>ω1) момент МА<Мкр. Соответственно, крутящего момента тягового электродвигателя становится недостаточно для создания тягового усилия, максимально возможного по сцеплению гусениц или колес с грунтом. Это приводит к ухудшению маневренности и подвижности платформы.
Для устранения этого недостатка механическая характеристика тягового электродвигателя должна иметь вид «Б» (см. фиг. 2). В этом случае электродвигатели обеспечивают максимально возможный по сцеплению тяговый момент гусениц или ведущих колес до скорости вращения его ротора ω2.
Для получения такой механической характеристики у реактивных индукторных тяговых электродвигателей 3, 4 осуществляется, в частности, уменьшение чисел витков в его фазных обмотках при одновременном увеличении максимальных выходных токов силовых ключей контроллеров тяговых электродвигателей 10, 11.
В случае применения тяговых электродвигателей с поперечным магнитным потоком (TFM) максимально возможное по сцеплению тяговое усилие, передаваемое на гусеницы или ведущие колеса, также обеспечивается до скорости вращения его ротора ω2, что достигается за счет более высоких значений крутящего момента электродвигателей этого типа. Остальные процессы взаимодействия гусениц или колес с грунтом или почвой остаются прежними.
Для специалистов в данной области техники также понятно, что кроме описанных вариантов роботизированной транспортной платформы возможны также иные варианты ее реализации на основе признаков, изложенных в формуле изобретения.
Ограничитель нагрузки грузоподъемного крана
Многофункциональное устройство грузоподъемной машины
Устройство горизонтирования люльки автоподъемника
Ограничитель нагрузки грузоподъемной машины
Система управления землеройно-транспортной машины
Гидравлическая система машины с гидростатической трансмиссией
Землеройно-транспортная машина с гидростатической трансмиссией
Самоходная рабочая машина с электромеханической трансмиссией
Трактор с регистратором параметров
Система контроля гидростатической трансмиссии машины
Ограничитель нагрузки грузоподъемного крана
Многофункциональное устройство грузоподъемной машины
Устройство горизонтирования люльки автоподъемника
Ограничитель нагрузки грузоподъемной машины
Система управления землеройно-транспортной машины
Гидравлическая система машины с гидростатической трансмиссией
Землеройно-транспортная машина с гидростатической трансмиссией
Самоходная рабочая машина с электромеханической трансмиссией
Трактор с регистратором параметров
Система контроля гидростатической трансмиссии машины

