Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ТОРМОЗНОЙ/ДВИЖУЩЕЙ СИЛОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗНОЙ/ДВИЖУЩЕЙ СИЛОЙ
Вид РИД
Изобретение
Область техники
Данное изобретение относится к способу управления тормозной/движущей силой и к устройству управления тормозной/движущей силой.
Уровень техники
В JP 2000-205015 A раскрыта, например, технология для управления тормозной/движущей силой транспортного средства. В технологии, раскрытой в JP 2000-205015 A, когда рабочая величина нажатия педали акселератора равна или выше предварительно определенной величины, задается целевое ускорение, и альтернативно, когда рабочая величина нажатия педали акселератора меньше предварительно определенной величины, задается целевое замедление. Тормозная/движущая сила транспортного средства управляется таким образом, что реализуется заданное целевое ускорение или целевое замедление.
Техническая задача
Тем не менее, технология, раскрытая в JP 2000-205015 A, имеет такую проблему, что во время движения, при котором рабочая величина нажатия педали акселератора является постоянной, ускорение/замедление и скорость транспортного средства могут изменяться в зависимости от изменения уклона поверхности дороги, по которой движется транспортное средство. Следует отметить, что изменение уклона поверхности дороги включает в себя, например, случай, в котором поверхность проезжей дороги изменяется с равнинной местности на дорогу с уклоном, и случай, в котором во время движения на дороге с уклоном, уклон дороги с уклоном изменяется.
Настоящее изобретение осуществлено, чтобы разрешать вышеописанную проблему, и цель настоящего изобретения заключается в том, чтобы предоставлять способ управления тормозной/движущей силой и устройство управления тормозной/движущей силой, которые позволяют подавлять изменение ускорения/замедления и скорости транспортного средства в зависимости от изменения уклона поверхности дороги.
Решение задачи
Чтобы разрешать вышеописанные проблемы, согласно одному аспекту настоящего изобретения, когда величина уклона поверхности дороги, по которой движется транспортное средство, увеличивается, базовая тормозная сила, заданная заранее, корректируется таким образом, что она уменьшается, на основе величины уклона поверхности дороги, или базовая движущая сила, заданная заранее, корректируется таким образом, что она увеличивается, на основе величины уклона. Скорректированная тормозная сила или движущая сила генерируется.
С другой стороны, когда величина уклона поверхности дороги уменьшается, базовая тормозная сила корректируется таким образом, что она увеличивается, на основе величины уклона поверхности дороги, или базовая движущая сила корректируется таким образом, что она уменьшается, на основе величины уклона поверхности дороги. Затем скорректированная тормозная сила или движущая сила генерируется.
Краткое описание чертежей
Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства управления тормозной/движущей силой согласно первому варианту осуществления настоящего изобретения;
Фиг. 2 является блок-схемой, иллюстрирующей конфигурацию транспортного средства, включающего в себя устройство управления тормозной/движущей силой согласно первому варианту осуществления настоящего изобретения;
Фиг. 3 является блок-схемой, иллюстрирующей конфигурацию модуля ITS-управления;
Фиг. 4 является блок-схемой, иллюстрирующей конфигурацию модуля управления электромотором;
Фиг. 5 является чертежом, иллюстрирующим карту тормозной/движущей силы;
Фиг. 6 является чертежом, иллюстрирующим первую карту тормозной силы;
Фиг. 7 является блок-схемой, иллюстрирующей конфигурацию модуля коррекции тормозной/движущей силы;
Фиг. 8 является чертежом, иллюстрирующим карту вспомогательного коэффициента усиления;
Фиг. 9 является чертежом, иллюстрирующим карту скорректированной тормозной/движущей силы;
Фиг. 10 является блок-схемой, иллюстрирующей конфигурацию модуля ограничения коррекции;
Фиг. 11 является блок-схемой, иллюстрирующей конфигурацию модуля управления фрикционной тормозной силой;
Фиг. 12 является чертежом, иллюстрирующим вторую карту тормозной силы;
Фиг. 13 является чертежом, иллюстрирующим карту выбора рекуперативной тормозной силы;
Фиг. 14A является блок-схемой последовательности операций способа, иллюстрирующей процессы, проводимые посредством устройства управления тормозной/движущей силой согласно первому варианту осуществления настоящего изобретения;
Фиг. 14B является блок-схемой последовательности операций способа, иллюстрирующей процессы, проводимые посредством устройства управления тормозной/движущей силой согласно первому варианту осуществления настоящего изобретения;
Фиг. 15A является блок-схемой последовательности операций способа, иллюстрирующей процессы, проводимые посредством устройства управления тормозной/движущей силой согласно первому варианту осуществления настоящего изобретения;
Фиг. 16A и 16B являются временными диаграммами, иллюстрирующими операции транспортного средства, причем фиг. 16A является временной диаграммой, иллюстрирующей операции транспортного средства, не включающего в себя устройство управления тормозной/движущей силой согласно первому варианту осуществления настоящего изобретения, а фиг. 16B является временной диаграммой, иллюстрирующей операции транспортного средства, включающего в себя устройство управления тормозной/движущей силой согласно первому варианту осуществления настоящего изобретения; и
Фиг. 17 является чертежом, иллюстрирующим карту тормозной силы с использованием конфигурации без применения устройства управления тормозной/движущей силой согласно первому варианту осуществления настоящего изобретения;
Фиг. 18A и 18B являются временной диаграммой, иллюстрирующей операции транспортного средства, причем фиг. 18A является временной диаграммой, иллюстрирующей операции транспортного средства, не включающего в себя устройство управления тормозной/движущей силой согласно первому варианту осуществления настоящего изобретения, а фиг. 18B является временной диаграммой, иллюстрирующей операции транспортного средства, включающего в себя устройство управления тормозной/движущей силой согласно первому варианту осуществления настоящего изобретения;
Фиг. 19 является чертежом, иллюстрирующим варьирование первого варианта осуществления настоящего изобретения;
Фиг. 20 является чертежом, иллюстрирующим варьирование первого варианта осуществления настоящего изобретения;
Фиг. 21 является чертежом, иллюстрирующим варьирование первого варианта осуществления настоящего изобретения;
Фиг. 22 является чертежом, иллюстрирующим варьирование первого варианта осуществления настоящего изобретения; и
Фиг. 23 является чертежом, иллюстрирующим варьирование первого варианта осуществления настоящего изобретения.
Подробное описание вариантов осуществления изобретения
Ниже описываются конкретные подробности, чтобы предоставлять полное понимание вариантов осуществления настоящего изобретения. Тем не менее, даже если конкретные подробности не описываются, очевидно, что могут выполняться один или более вариантов осуществления. Дополнительно, известные структуры и устройства могут представляться схематично для того, чтобы упрощать чертеж.
Первый вариант осуществления
Ниже описывается первый вариант осуществления настоящего изобретения со ссылкой на чертежи.
Конфигурация устройства управления тормозной/движущей силой
Со ссылкой на фиг. 1-15 описывается конфигурация устройства 1 управления тормозной/движущей силой согласно первому варианту осуществления.
Как проиллюстрировано на фиг. 1, устройство 1 управления тормозной/движущей силой включает в себя модуль 2 ITS-управления, модуль 4 управления электромотором и модуль 6 управления фрикционной тормозной силой.
Модуль 2 ITS-управления сконфигурирован, например, из микрокомпьютера.
Следует отметить, что микрокомпьютер включает в себя, например, центральный процессор (CPU), оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM) и т.п.
Модуль 2 ITS-управления принимает информационные сигналы от датчика 8 распознавания внешнего окружения, переключателя 10 задания скорости, переключателя 12 выбора режима и модуля 14 вычисления скорости транспортного средства.
Модуль 2 ITS-управления, с использованием различных принимаемых информационных сигналов, управляет тормозной силой и движущей силой, сгенерированной в транспортном средстве, включающем в себя устройство 1 управления тормозной/движущей силой. Тормозная сила, управляемая посредством модуля 2 ITS-управления, представляет собой тормозную силу, которая управляется отдельно от запроса на тормозную силу водителем транспортного средства. Аналогично, движущая сила, управляемая посредством модуля 2 ITS-управления, представляет собой движущую силу, которая управляется отдельно от запроса на движущую силу водителем транспортного средства.
Следует отметить, что ниже описываются подробные конфигурации модуля 2 ITS-управления.
Датчик 8 распознавания внешнего окружения формируется, например, из устройства захвата изображений, такого как широкоугольная камера, и устройства измерения расстояния, такого как лазерный дальномер (LRF).
Датчик 8 распознавания внешнего окружения, с использованием устройства захвата изображений и устройства измерения расстояния, обнаруживает объект управления, который присутствует в окрестностях транспортного средства (в частности, перед транспортным средством). Датчик 8 распознавания внешнего окружения, который обнаруживает объект управления, присутствующий в окрестностях транспортного средства C, выводит информационный сигнал, включающий в себя обнаруженный объект управления (в дальнейшем в этом документе, иногда называемый "сигналом объекта управления"), в модуль 2 ITS-управления.
Следует отметить, что объекты управления представляют собой, например, другие транспортные средства, такие как едущие впереди транспортные средства, пешеходов, животных, дорожное ограждение, бордюрные камни и полосы безопасности.
Переключатель 10 задания скорости представляет собой переключатель для задания скорости движения (управляющей скорости) транспортного средства, когда проводится автоматическое управление движением. Дополнительно, переключатель 10 задания скорости формируется из переключателя (рычага, кнопки и т.п.), расположенного в позиции (к примеру, на руле), в которой пассажир транспортного средства (водитель и т.п.) может управлять переключателем.
Переключатель 10 задания скорости выводит информационный сигнал, включающий в себя заданную скорость движения (заданную скорость) (в дальнейшем иногда называемый "сигналом заданной скорости"), в модуль 2 ITS-управления.
Следует отметить, что автоматическое управление движением включает в себя автоматическое управление скоростью (управление для движущегося транспортного средства на заданной скорости движения без нажатия педали акселератора водителем) и управление тормозной силой или движущей силой в зависимости от объекта управления.
Хотя отдельно не проиллюстрировано, проводить или нет автоматическое управление движением выбирается путем задействования переключателя, расположенного в позиции (такой как рулевое колесо), где пассажир может взаимодействовать с переключателем.
Переключатель 12 выбора режима представляет собой переключатель для выбора одного из "однопедального режима" или "двухпедального режима" в качестве режима (режима управления) для управления тормозной силой и движущей силой транспортного средства.
"Однопедальный режим" представляет собой режим управления для управления тормозной силой и движущей силой транспортного средства C главным образом в зависимости от операции нажатия педали AP акселератора.
В дальнейшем в этом документе, конкретно описываются подробности управления тормозной силы и движущей силы в зависимости от рабочей величины нажатия педали AP акселератора в "однопедальном режиме". В нижеприведенном описании, предполагается, что транспортное средство движется по ровной поверхности дороги.
- Когда педаль AP акселератора не управляется
Когда педаль AP акселератора не управляется (что включает в себя случай, в котором педаль акселератора не нажимается за рамками свободного движения), генерируется тормозная сила в зависимости от требуемого тормозного момента для удерживания остановленного состояния.
Требуемый тормозной момент для удерживания остановленного состояния представляет собой тормозной момент для удерживания остановленного состояния транспортного средства и задается, например, на основе веса транспортного средства, способности генерирования рекуперативной тормозной силы и способности генерирования фрикционной тормозной силы.
- Когда рабочая величина нажатия педали AP акселератора находится в пределах диапазона торможения
Когда рабочая величина нажатия педали AP акселератора находится в пределах диапазона торможения, в ответ на увеличение рабочей величины нажатия педали AP акселератора, генерируется тормозная сила, меньшая тормозной силы в зависимости от требуемого тормозного момента для удерживания остановленного состояния.
Диапазон торможения представляет собой диапазон, соответствующий рабочей величине нажатия педали AP акселератора, от нерабочего состояния до рабочей величины переключения тормозной/движущей силы.
Рабочая величина переключения тормозной/движущей силы соответствует, из рабочих величин (степеней открытия) педали AP акселератора, рабочей величине (степени открытия) для переключения между движущей силой и тормозной силой, сгенерированной в транспортном средстве. Следует отметить, что рабочая величина переключения тормозной/движущей силы задается равной рабочей величине (степени открытия) педали AP акселератора приблизительно в 25%.
- Когда рабочая величина нажатия педали AP акселератора находится в пределах диапазона приведения в движение
Когда рабочая величина нажатия педали AP акселератора находится в пределах диапазона приведения в движение, движущая сила генерируется таким образом, что она увеличивается в зависимости от величины увеличения рабочей величины нажатия педали AP акселератора по сравнению с рабочей величиной переключения тормозной/движущей силы.
Диапазон приведения в движение представляет собой диапазон, соответствующий рабочей величине, превышающей рабочую величину переключения тормозной/движущей силы педали AP акселератора.
Из вышеозначенного, в "однопедальном режиме", когда рабочая величина нажатия педали AP акселератора равна или меньше рабочей величины переключения тормозной/движущей силы, движущая сила не генерируется в транспортном средстве. Следовательно, явление медленного движения не вызывается в транспортном средстве, имеющем устройство 1 управления тормозной/движущей силой согласно первому варианту осуществления. Явление медленного движения представляет собой явление, вызываемое в транспортном средстве с автоматической трансмиссией (AT), которое включает в себя двигатель внутреннего сгорания в качестве источника приведения в движение.
Следует отметить, что хотя через операцию непроиллюстрированного переключателя и т.п., управление для вызывания явления медленного движения, аналогичному явлению медленного движения транспортного AT-средства, может проводиться, в первом варианте осуществления, описывается управление для невызывания явления медленного движения, аналогичному явлению медленного движения транспортного AT-средства.
Следовательно, когда рабочая величина нажатия педали AP акселератора меньше порогового значения, заданного заранее, устройство 1 управления тормозной/движущей силой согласно первому варианту осуществления генерирует тормозную силу в зависимости от рабочей величины нажатия педали AP акселератора, которая меньше порогового значения, и скорости движения транспортного средства.
Дополнительно, когда рабочая величина нажатия педали AP акселератора равна или выше порогового значения, устройство 1 управления тормозной/движущей силой согласно первому варианту осуществления генерирует движущую силу в зависимости от рабочей величины нажатия педали AP акселератора, которая равна или выше порогового значения, и скорости движения транспортного средства.
"Двухпедальный режим" представляет собой режим управления, в котором тормозная сила транспортного средства управляется в соответствии с операцией нажатия главным образом педали BP тормоза, и движущая сила транспортного средства управляется в соответствии с операцией нажатия педали AP акселератора.
В частности, в "двухпедальном режиме", когда педаль AP акселератора управляется (нажимается), генерируется движущая сила. Дополнительно, по мере того, как рабочая величина нажатия педали AP акселератора увеличивается, движущая сила увеличивается.
В "двухпедальном режиме", когда рабочее состояние педали AP акселератора переключается из рабочего состояния в нерабочее состояние, вызывается тормозная сила, соответствующая тормозному двигателю, причем эта тормозная сила, в общем, вызывается в транспортном средстве, имеющем двигатель внутреннего сгорания в качестве источника приведения в движение. Через операции непроиллюстрированных переключателей и т.п., может проводиться управление для того, чтобы не возникало тормозной силы, соответствующей торможению двигателем.
Переключатель 12 выбора режима формируется из переключателя (круговой ручки регулировки и т.п.), расположенного в позиции (к примеру, на приборной панели), в которой пассажир транспортного средства может управлять переключателем.
Переключатель 12 выбора режима выводит информационный сигнал, включающий в себя результат выбора режима управления (в дальнейшем иногда называемый "сигналом выбора режима"), в модуль 2 ITS-управления и модуль 4 управления электромотором.
Модуль 14 вычисления скорости транспортного средства принимает, из датчика 16 скорости вращения колес, сигнал скорости вращения колес, включающий в себя частоту оборотов колеса. Модуль 14 вычисления скорости транспортного средства, с использованием частоты оборотов, включенной в сигнал скорости вращения колес, вычисляет скорость движения транспортного средства C (в дальнейшем иногда называемую "скоростью транспортного средства"). Дополнительно, модуль 14 вычисления скорости транспортного средства выводит информационный сигнал, включающий в себя вычисленную скорость транспортного средства (в дальнейшем иногда называемый "сигналом скорости транспортного средства"), в модуль 2 ITS-управления, модуль 4 управления электромотором и модуль 6 управления фрикционной тормозной силой.
Следует отметить, что модуль 14 вычисления скорости транспортного средства может быть включен, например, в известную систему управления динамикой транспортного средства (VDC).
Датчик 16 скорости вращения колес, как проиллюстрировано на фиг. 2, монтируется на транспортном средстве C. Датчик 16 скорости вращения колес формирует предварительно определенное число импульсов скорости вращения колес для одного вращения колеса W транспортного средства C.
Дополнительно, датчик 16 скорости вращения колес выводит сигнал скорости вращения колес, включающий в себя частоту оборотов колеса, в модуль 4 управления электромотором. Модуль 4 управления электромотором управляет рекуперативной тормозной силой и движущей силой, сгенерированной в транспортном средстве C. Дополнительно, модуль 4 управления электромотором, аналогично модулю 2 ITS-управления, сконфигурирован, например, из микрокомпьютера.
Следует отметить, что ниже описываются подробные конфигурации модуля 4 управления электромотором.
Модуль 6 управления фрикционной тормозной силой управляет фрикционной тормозной силой, сгенерированной в транспортном средстве C. Модуль 6 управления фрикционной тормозной силой, аналогично модулю 4 управления электромотором, сконфигурирован, например, из микрокомпьютера.
Следует отметить, что ниже описываются подробные конфигурации модуля 6 управления фрикционной тормозной силой.
Подробные конфигурации модуля 2 ITS-управления
Модуль 2 ITS-управления, как проиллюстрировано на фиг. 3, включает в себя модуль 20 вычисления движущей силы на постоянной скорости, модуль 22 вычисления тормозной/движущей силы согласно ITS, модуль 24 задания ITS-вывода и модуль 26 вывода состояния ITS-управления.
Модуль 20 вычисления движущей силы на постоянной скорости принимает сигнал заданной скорости, сигнал выбора режима и сигнал скорости транспортного средства. Модуль 20 вычисления движущей силы на постоянной скорости вычисляет движущую силу, сгенерированную в транспортном средстве, на основе режима управления, включенного в сигнал выбора режима, и отклонения (разности скоростей) между заданной скоростью, включенной в сигнал заданной скорости, и скоростью транспортного средства, включенной в сигнал скорости транспортного средства.
Модуль 20 вычисления движущей силы на постоянной скорости, например, увеличивает движущую силу, когда скорость транспортного средства меньше заданной скорости, и уменьшает движущую силу, когда скорость транспортного средства превышает заданную скорость.
Модуль 20 вычисления движущей силы на постоянной скорости, который вычисляет движущую силу, которая должна генерироваться в транспортном средстве, выводит информационный сигнал, включающий в себя вычисленную движущую силу (в дальнейшем иногда называемый "сигналом движущей силы на постоянной скорости"), в модуль 24 задания ITS-вывода.
Модуль 22 вычисления тормозной/движущей силы согласно ITS принимает сигнал объекта управления. Модуль 22 вычисления тормозной/движущей силы согласно ITS вычисляет тормозную силу или движущую силу, сгенерированную в транспортном средстве, в зависимости от объекта управления, включенного в сигнал объекта управления.
Модуль 22 вычисления тормозной/движущей силы согласно ITS увеличивает тормозную силу, например, когда объект управления присутствует в направлении движения транспортного средства, и когда расстояние между объектом управления и транспортным средством является коротким. Дополнительно, модуль 22 вычисления тормозной/движущей силы согласно ITS увеличивает движущую силу, когда, например, объект управления присутствует в направлении движения транспортного средства, и расстояние между объектом управления и транспортным средством является коротким.
Модуль 22 вычисления тормозной/движущей силы согласно ITS, который вычисляет тормозную силу или движущую силу, сгенерированную в транспортном средстве, выводит информационный сигнал, включающий в себя вычисленную тормозную силу или движущую силу (в дальнейшем иногда называемый "сигналом тормозной/движущей силы согласно ITS"), в модуль 24 задания ITS-вывода.
Модуль 24 задания ITS-вывода принимает сигнал движущей силы на постоянной скорости и сигнал тормозной/движущей силы согласно ITS. Затем модуль 24 задания ITS-вывода выбирает любое из движущей силы, включенной в сигнал движущей силы на постоянной скорости, и тормозной силы или движущей силы, включенной в сигнал тормозной/движущей силы согласно ITS. Модуль 24 задания ITS-вывода выводит информационный сигнал, включающий в себя выбранную тормозную силу или движущую силу (в дальнейшем иногда называемый "сигналом ITS-вывода"), в модуль 26 вывода состояния ITS-управления и модуль 4 управления электромотором.
Модуль 26 вывода состояния ITS-управления принимает сигнал ITS-вывода. Модуль 26 вывода состояния ITS-управления определяет то, вычисляют модуль 20 вычисления движущей силы на постоянной скорости и модуль 22 вычисления тормозной/движущей силы согласно ITS тормозную силу или движущую силу, в зависимости от автоматического управления скоростью или объекта управления, на основе тормозной силы или движущей силы, включенной в сигнал ITS-вывода. Модуль 26 вывода состояния ITS-управления выводит информационный сигнал, включающий в себя результат определения (в дальнейшем иногда называемый "сигналом определения согласно ITS"), в модуль 4 управления электромотором.
Подробные конфигурации модуля 4 управления электромотором
Модуль 4 управления электромотором, как проиллюстрировано на фиг. 4, включает в себя модуль 40 вычисления базовой тормозной/движущей силы, модуль 42 определения уклона и модуль 44 коррекции тормозной/движущей силы. Дополнительно, модуль 4 управления электромотором включает в себя модуль 46 управления арбитрированием, модуль 48 распределения тормозной/движущей силы, модуль 50 управления движущей силой, модуль 52 вычисления первой запрашиваемой тормозной силы и модуль 54 управления рекуперативной тормозной силой.
Модуль 40 вычисления базовой тормозной/движущей силы заранее сохраняет карту тормозной/движущей силы.
Карта тормозной/движущей силы, как проиллюстрировано на фиг. 10, например, представляет собой карту, указывающую взаимосвязь между скоростью транспортного средства, рабочей величиной (степенью открытия) педали AP акселератора и крутящим моментом (движущим моментом, тормозным моментом), сгенерированными в транспортном средстве.
Карта тормозной/движущей силы, проиллюстрированная на фиг. 5, задается заранее таким образом, что движущий момент и тормозной момент имеют значения тормозной/движущей силы, заданные заранее, когда устанавливаются следующие условия A1-A3.
A1. Уклон поверхности дороги (уклон поверхности проезжей дороги) находится в пределах диапазона уклона, заданного заранее, включающего в себя нуль.
A2. Рабочая величина нажатия педали AP акселератора равна или меньше пороговой рабочей величины для остановки.
A3. Скорость транспортного средства равна или меньше пороговой скорости транспортного средства для остановки, заданной заранее.
В первом варианте осуществления, в качестве одного примера, диапазон уклона задается в качестве диапазона уклона, когда поверхность проезжей дороги является ровной (например, с уклоном равным нулю в качестве исходного уровня, в качестве диапазона от +0,5° до -0,5°). Дополнительно, в первом варианте осуществления, в качестве одного примера, описывается случай, в котором значение тормозной/движущей силы задается равным нулю.
В первом варианте осуществления, в качестве одного примера, описывается случай, в котором пороговая рабочая величина для остановки задается равной нулю. Дополнительно, в первом варианте осуществления, в качестве одного примера, описывается случай, в котором пороговая скорость транспортного средства для остановки задается равной нулю.
Соответственно, в первом варианте осуществления, карта тормозной/движущей силы, проиллюстрированная на фиг. 5, задается заранее таким образом, что когда поверхность проезжей дороги является ровной и рабочая величина нажатия педали AP акселератора и скорость транспортного средства равны нулю, движущий момент и тормозной момент равны нулю.
Следует отметить, что на фиг. 5, рабочая величина (степень открытия) педали AP акселератора обозначается с помощью ссылки с номером "APO". Дополнительно, на фиг. 5, в состоянии, в котором рабочая величина нажатия педали AP акселератора является минимальным значением (нерабочим), крутящий момент, сгенерированный в зависимости от скорости транспортного средства, обозначается с помощью ссылки с номером "T-MIN1". Дополнительно, на фиг. 5, в состоянии, в котором рабочая величина нажатия педали AP акселератора является максимальным значением (рабочая величина нажатия педали является максимальной), крутящий момент, сгенерированный в зависимости от скорости транспортного средства, обозначается с помощью ссылки с номером "T-MAX1".
На фиг. 5, движущий момент и тормозной момент представляются на продольной оси с "0" в качестве граничной линии. Таким образом, на карте тормозной/движущей силы, проиллюстрированной на фиг. 5, крутящий момент, обозначаемый с помощью "T-MIN1", представляет собой только тормозной момент. Дополнительно, на карте тормозной/движущей силы, проиллюстрированной на фиг. 5, крутящий момент, обозначаемый с помощью "T-MAX1", представляет собой только движущий момент.
"Базовая пороговая скорость транспортного средства", проиллюстрированная на фиг. 5, в состоянии, в котором рабочая величина нажатия педали AP акселератора является минимальным значением (нерабочим), соответствует граничной линии между зоной (зоной изменения), в которой изменение крутящего момента, сгенерированного в зависимости от скорости транспортного средства, уменьшается, и зоной (фиксированной зоной), в которой изменение крутящего момента, сгенерированного в зависимости от скорости транспортного средства, является постоянным.
Педаль AP акселератора представляет собой педаль, предоставленную в транспортном средстве, и педаль, задействованную водителем транспортного средства в ответ на запрос на тормозную силу или запрос на движущую силу.
Модуль 40 вычисления базовой тормозной/движущей силы принимает, от датчика APS акселератора, информационный сигнал, включающий в себя рабочую величину нажатия педали AP акселератора (рабочую величину тормозной/движущей силы). Дополнительно, модуль 40 вычисления базовой тормозной/движущей силы принимает, из модуля 14 вычисления скорости транспортного средства, сигнал скорости транспортного средства.
Дополнительно, модуль 40 вычисления базовой тормозной/движущей силы принимает, из переключателя 12 выбора режима, сигнал выбора режима. Следует отметить, что ниже описывается случай, в котором режим управления, включенный в сигнал выбора режима, представляет собой "однопедальный режим".
Модуль 40 вычисления базовой тормозной/движущей силы вводит рабочую величину нажатия педали AP акселератора и скорость транспортного средства в карту тормозной/движущей силы, чтобы вычислять целевое значение движущего момента, сгенерированного в транспортном средстве C (целевой движущий момент), или целевое значение тормозного момента (целевой тормозной момент). Следует отметить, что целевой движущий момент и целевой тормозной момент, вычисленные посредством модуля 40 вычисления базовой тормозной/движущей силы, представляют собой целевой движущий момент и целевой тормозной момент, когда транспортное средство C движется по ровной поверхности дороги (движение по ровной поверхности). Целевой движущий момент представляет собой крутящий момент, соответствующий базовой движущей силе, и целевой тормозной момент представляет собой крутящий момент, соответствующий базовой тормозной силе.
Другими словами, модуль 40 вычисления базовой тормозной/движущей силы вводит рабочую величину нажатия педали AP акселератора и скорость транспортного средства в карту тормозной/движущей силы, чтобы задавать базовую тормозную силу и базовую движущую силу.
Соответственно, карта тормозной/движущей силы, проиллюстрированная на фиг. 5, включает в себя зону изменения, в которой по мере того, как скорость транспортного средства уменьшается (приближается к нулю), базовая тормозная сила уменьшается. Другими словами, карта тормозной/движущей силы, проиллюстрированная на фиг. 5, задается заранее таким образом, что когда поверхность проезжей дороги является ровной и если рабочая величина нажатия педали AP акселератора равна нулю, и скорость движения равна нулю, базовая тормозная сила и базовая движущая сила равны нулю.
Согласно карте тормозной/движущей силы, проиллюстрированной на фиг. 5, когда рабочая величина нажатия педали AP акселератора равна или меньше пороговой рабочей величины для остановки (нуля в первом варианте осуществления), генерируется тормозная сила для остановки транспортного средства C.
Другими словами, модуль 40 вычисления базовой тормозной/движущей силы, в зависимости от рабочей величины нажатия педали AP акселератора и скорости транспортного средства, вычисляет базовую тормозную силу и базовую движущую силу.
В частности, когда рабочая величина нажатия педали AP акселератора меньше порогового значения, заданного заранее (рабочей величины переключения тормозной/движущей силы), вычисляется базовая тормозная сила в зависимости от рабочей величины нажатия педали AP акселератора, которая меньше порогового значения, и скорости движения, когда поверхность проезжей дороги является ровной. С другой стороны, когда рабочая величина нажатия педали AP акселератора равна или выше порогового значения, вычисляется базовая движущая сила в зависимости от рабочей величины нажатия педали AP акселератора, которая равна или выше порогового значения, и скорости движения, когда поверхность проезжей дороги является ровной.
Соответственно, модуль 40 вычисления базовой тормозной/движущей силы вводит, в карту тормозной/движущей силы, рабочую величину нажатия педали AP акселератора и скорость транспортного средства, чтобы вычислять базовую тормозную силу и базовую движущую силу.
Дополнительно, модуль 40 вычисления базовой тормозной/движущей силы, когда уклон поверхности дороги находится в пределах диапазона уклона (поверхность проезжей дороги является ровной), задает тормозную силу, сгенерированную в транспортном средстве C, равной базовой тормозной силе, заданной заранее, или задает движущую силу, сгенерированную в транспортном средстве C, равной базовой движущей силе, заданной заранее.
Модуль 40 вычисления базовой тормозной/движущей силы, который вычисляет целевой движущий момент, выводит информационный сигнал, включающий в себя вычисленный целевой движущий момент (в дальнейшем иногда называемый "сигналом базового движущего момента"), в модуль 44 коррекции тормозной/движущей силы.
Модуль 40 вычисления базовой тормозной/движущей силы, который вычисляет целевой тормозной момент, выводит информационный сигнал, включающий в себя вычисленный целевой тормозной момент (в дальнейшем иногда называемый "сигналом базового тормозного момента"), в модуль 44 коррекции тормозной/движущей силы.
Ниже подробно описывается "предельное усиление системы управления", представленное на карте тормозной/движущей силы.
Когда устройство 1 управления тормозной/движущей силой представляет собой систему, включающую в себя элемент запаздывания реакции на фиг. 10, если уклон линии, представленной посредством "предельного усиления системы управления", увеличивается слишком сильно (угол наклона увеличивается слишком сильно), может возникать рыскание в значении команды управления током приводного электромотора DM (электромотора). Это обусловлено тем, что по мере того, как угол наклона линии, представленной посредством предельного усиления системы управления относительно продольной оси, представляющей крутящий момент, увеличивается, степень изменения замедления относительно изменения скорости транспортного средства увеличивается.
Следует отметить, что "запаздывание реакции" означает то, что посредством увеличения степени изменения замедления относительно изменения скорости транспортного средства, изменение скорости транспортного средства не может придерживаться резкого изменения замедления в зависимости от рекуперативной тормозной силы, и изменение скорости транспортного средства задерживается относительно изменения замедления в зависимости от рекуперативной тормозной силы.
Когда возникает рыскание в значении команды управления током, варьирование тормозной силы, которая отличается от запроса водителя, формируется в замедляющемся транспортном средстве C, и формируется варьирование скорости транспортного средства, которое отличается от запроса водителя.
Рыскание, возникающее в значении команды управления током, формируется на основе следующих элементов (1-6), например, в состоянии, в котором транспортное средство C замедляется при движении по поверхности дороги, имеющей уклон под спуск, когда замедление в зависимости от рекуперативной тормозной силы определяется с использованием карты тормозной/движущей силы.
1. В связи с тем, что поверхность проезжей дороги имеет уклон под спуск, скорость транспортного средства увеличивается.
2. По мере того, как возрастает скорость транспортного средства, замедление в зависимости от рекуперативной тормозной силы увеличивается.
3. В связи с тем, что замедление в зависимости от рекуперативной тормозной силы увеличивается, скорость транспортного средства уменьшается.
4. В связи с тем, что скорость транспортного средства уменьшается, замедление в зависимости от рекуперативной тормозной силы уменьшается.
5. В связи с тем, что замедление в зависимости от рекуперативной тормозной силы уменьшается, скорость транспортного средства уменьшается.
6. Посредством повторения вышеуказанных элементов 2-5, возникает рыскание в значении команды управления током.
Если уклон линии, представленной посредством предельного усиления системы управления, является пологим (если угол наклона является небольшим), относительно изменения скорости транспортного средства, замедление в зависимости от рекуперативной тормозной силы резко не увеличивается или уменьшается. Таким образом, относительно изменения замедления в зависимости от рекуперативной тормозной силы, возникновение отставания по фазе изменения скорости транспортного средства подавляется, и можно подавлять рыскание, возникающее в значении команды управления током. Другими словами, посредством задания небольшим угла наклона линии, представленного посредством предельного усиления системы управления, можно стабилизировать управление значением команды управления током.
Из вышеозначенного, граничная линия между состоянием, в котором управление значением команды управления током является стабильным, и состоянием, в котором управление значением команды управления током является нестабильным, соответствует линии, представленной посредством предельного усиления системы управления на фиг. 5. Другими словами, линия, представленная посредством предельного усиления системы управления на фиг. 5, представляет собой верхний предел степени изменения рекуперативной тормозной силы в зависимости от скорости транспортного средства транспортного средства C. Угол наклона линии, представленной посредством предельного усиления системы управления на фиг. 5, задается, например, на основе рабочих характеристик приводного электромотора DM (способности генерировать рекуперативную тормозную силу), веса транспортного средства C и т.п. Другими словами, предельное усиление системы управления, проиллюстрированное на фиг. 5, представляет собой верхний предел степени изменения замедления в зависимости от рекуперативной тормозной силы (базовой тормозной силы) относительно скорости транспортного средства, при которой изменение скорости транспортного средства, вычисленное посредством модуля 14 вычисления скорости транспортного средства, может следовать за изменением замедления в зависимости от рекуперативной тормозной силы (базовой тормозной силы).
В области, не большей базовой пороговой скорости транспортного средства карты тормозной/движущей силы, степень изменения крутящего момента, обозначенная с помощью "T-MIN", относительно изменения скорости транспортного средства, вычисленной посредством модуля 14 вычисления скорости транспортного средства, равна или меньше предельного усиления системы управления. Другими словами, в области, не большей базовой пороговой скорости транспортного средства на карте тормозной/движущей силы, степень изменения с минимальным значением крутящего момента относительно изменения скорости транспортного средства, вычисленной посредством модуля 14 вычисления скорости транспортного средства, равна или меньше предельного усиления системы управления.
Дополнительно, на карте тормозной/движущей силы, проиллюстрированной на фиг. 5, степень изменения базовой тормозной силы на основе изменения скорости транспортного средства в зоне изменения равна или меньше предельного усиления системы управления, которое представляет собой степень изменения, заданную заранее.
Модуль 42 определения уклона заранее сохраняет взаимосвязь между движущим моментом, сгенерированным для равнинной местности (ровной дороги), и частотой оборотов колеса в качестве исходного уровня (исходного уровня равнинной местности). Следует отметить, что взаимосвязь между движущим моментом, сгенерированным для ровной дороги, и частотой оборотов колеса, например, вычисляется с использованием поверхности дороги для испытания, сгенерированной с уклоном в пределах диапазона, соответствующего ровной дороге, и модуль 42 определения уклона сохраняет взаимосвязь в качестве исходного уровня равнинной местности.
Модуль 42 определения уклона принимает, из модуля 50 управления движущей силой, сигнал движущего момента, включающий в себя значение команды управления током приведения в движение, и принимает, из датчика 16 скорости вращения колес, сигнал скорости вращения колес, включающий в себя частоту оборотов колеса. Дополнительно, модуль 42 определения уклона, принимает, от датчика MS частоты вращения электромотора, сигнал частоты вращения выходного вала, включающий в себя частоту вращения выходного вала для передачи движущей силы электромотора (не проиллюстрирован) для приводного электромотора DM.
Датчик MS частоты вращения электромотора формируется, например, из кругового датчика позиции, который определяет частоту вращения (состояние вращения) выходного вала для передачи движущей силы электромотора для приводного электромотора DM.
Следует отметить, что ниже приводятся описания сигнала движущего момента и сигнала частоты вращения выходного вала.
Модуль 42 определения уклона вычисляет взаимосвязь между текущим движущим моментом, который вычисляется с использованием значения команды управления током, и частотой оборотов колеса W (текущую взаимосвязь). Дополнительно, модуль 42 определения уклона определяет величину уклона поверхности дороги с использованием степени отклонения между вычисленной текущей взаимосвязью и сохраненным исходным уровнем равнинной местности.
Например, когда частота оборотов колеса W относительно движущего крутящего момента ниже исходного уровня равнинной местности, уклон поверхности дороги определяется в качестве уклона с подъемом. Дополнительно, когда частота оборотов колеса W запаздывает, уклон с подъемом обнаруживается как большой уклон.
С другой стороны, когда частота оборотов колеса W относительно движущего момента превышает исходный уровень равнинной местности, уклон поверхности дороги определяется в качестве уклона под спуск. Дополнительно, когда частота оборотов колеса W является большой, уклон под спуск обнаруживается в качестве большого уклона под спуск.
Соответственно, модуль 42 определения уклона обнаруживает направление уклона поверхности дороги, вдоль которого движется транспортное средство C, и величину уклона поверхности дороги.
Другими словами, модуль 42 определения уклона определяет то, представляет собой направление уклона поверхности дороги, вдоль которого движется транспортное средство C, восходящее направление или направление вниз.
Модуль 42 определения уклона, который обнаруживает направление и величину уклона поверхности дороги, выводит информационный сигнал, включающий в себя направление и величину обнаруженного уклона (в дальнейшем иногда называемый "сигналом уклона поверхности дороги"), в модуль 44 коррекции тормозной/движущей силы и первый модуль 52 вычисления запрашиваемой тормозной силы.
Модуль 44 коррекции тормозной/движущей силы принимает информационные сигналы из датчика APS акселератора, модуля 40 вычисления базовой тормозной/движущей силы, модуля 42 определения уклона, модуля 14 вычисления скорости транспортного средства, модуля 2 ITS-управления и модуля 46 управления арбитрированием.
Модуль 44 коррекции тормозной/движущей силы корректирует целевой движущий момент для движения по ровной поверхности, включенный в сигнал базового движущего момента, и целевой тормозной момент движения по ровной поверхности, включенный в сигнал базового тормозного момента, с использованием различных принимаемых информационных сигналов.
Модуль 44 коррекции тормозной/движущей силы, который корректирует целевой движущий момент движения по ровной поверхности, включенный в сигнал базового движущего момента, выводит информационный сигнал, включающий в себя движущую силу (скорректированную движущую силу) в зависимости от скорректированного движущего момента (в дальнейшем иногда называемый "сигналом скорректированной движущей силы"), в модуль 46 управления арбитрированием.
Модуль 44 коррекции тормозной/движущей силы, который корректирует целевой тормозной момент движения по ровной поверхности, включенный в сигнал базового движущего момента, выводит информационный сигнал, включающий в себя тормозную силу в зависимости от скорректированного тормозного момента (скорректированную тормозную силу) (в дальнейшем иногда называемый "сигналом скорректированной тормозной силы"), в модуль 46 управления арбитрированием.
Другими словами, когда поверхность проезжей дороги не является ровной, модуль 44 коррекции тормозной/движущей силы корректирует базовую тормозную силу на основе направления и величины уклона, чтобы вычислять скорректированную тормозную силу, и задает тормозную силу транспортного средства C равной скорректированной тормозной силе. Дополнительно, когда поверхность проезжей дороги не является ровной, модуль 44 коррекции тормозной/движущей силы корректирует базовую движущую силу на основе направления и величины уклона, чтобы вычислять скорректированную движущую силу, и задает движущую силу транспортного средства C равной скорректированной движущей силе.
Следует отметить, что ниже описываются подробные конфигурации модуля 44 коррекции тормозной/движущей силы.
Модуль 46 управления арбитрированием принимает сигнал скорректированной движущей силы или сигнал скорректированной тормозной силы и сигнал ITS-вывода.
Модуль 46 управления арбитрированием определяет то, устанавливается или нет перехват управления водителем, на основе движущей силы или тормозной силы, которая включена в сигнал ITS-вывода и выбирается посредством модуля 24 задания ITS-вывода, движущей силы, включенной в сигнал скорректированной движущей силы, и тормозной силы, включенной в сигнал скорректированной тормозной силы. Модуль 46 управления арбитрированием, который определяет то, устанавливается или нет перехват управления водителем, выводит информационный сигнал, включающий в себя результат определения (в дальнейшем иногда называемый "сигналом определения Dr-перехвата управления"), в модуль 44 коррекции тормозной/движущей силы.
Перехват управления водителем указывает состояние, в котором водитель транспортного средства C имеет право управления движущей силой или тормозной силой транспортного средства C. Другими словами, перехват управления водителем указывает состояние, в котором, например, движущая сила, намеченная водителем транспортного средства C (движущая сила в зависимости от рабочей величины нажатия педали AP акселератора), превышает движущую силу, выбранную посредством модуля 24 задания ITS-вывода. Соответственно, когда перехват управления водителем устанавливается, управление тормозной/движущей силой посредством модуля 2 ITS-управления прекращается.
Определение в отношении того, устанавливается или нет перехват управления, выполняется посредством сравнения параметра, выбранного посредством модуля 24 задания ITS-вывода, с параметром, включенным в сигнал скорректированной движущей силы. Другими словами, когда движущая сила, включенная в сигнал скорректированной движущей силы, превышает движущую силу, выбранную посредством модуля 24 задания ITS-вывода, определяется то, что перехват управления водителем устанавливается. Дополнительно, когда тормозная сила, включенная в сигнал скорректированной тормозной силы, превышает тормозную силу, выбранную посредством модуля 24 задания ITS-вывода, определяется то, что перехват управления водителем устанавливается.
Модуль 46 управления арбитрированием сравнивает параметр, подвергнутый процессу фильтрации посредством модуля 24 задания ITS-вывода, с параметром, включенным в сигнал скорректированной движущей силы, и выбирает движущую силу или тормозную силу, которая должна выводиться в модуль 48 распределения тормозной/движущей силы.
В частности, когда модуль 46 управления арбитрированием принимает, из модуля 24 задания ITS-вывода, сигнал ITS-вывода, включающий в себя движущую силу, и принимает из модуля 44 коррекции тормозной/движущей силы, сигнал скорректированной движущей силы, модуль 46 управления арбитрированием сравнивает движущую силу, включенную в сигнал скорректированной движущей силы, с движущей силой, выбранной посредством модуля 24 задания ITS-вывода. Затем модуль 46 управления арбитрированием выбирает большую движущую силу (выбор высокого уровня) и выводит информационный сигнал, включающий в себя выбранную движущую силу (в дальнейшем иногда называемый "сигналом движущей силы арбитрирования"), в модуль 48 распределения тормозной/движущей силы.
С другой стороны, когда модуль 46 управления арбитрированием принимает, из модуля 24 задания ITS-вывода, сигнал ITS-вывода, включающий в себя тормозную силу, и принимает, из модуля 44 коррекции тормозной/движущей силы, сигнал скорректированной тормозной силы, модуль 46 управления арбитрированием сравнивает тормозную силу, включенную в сигнал скорректированной тормозной силы, с тормозной силой, выбранной посредством модуля 24 задания ITS-вывода. Модуль 46 управления арбитрированием выбирает большую тормозную силу (выбор высокого уровня) и выводит информационный сигнал, включающий в себя выбранную тормозную силу (в дальнейшем иногда называемый "сигналом тормозной силы арбитрирования"), в модуль 48 распределения тормозной/движущей силы.
После приема сигнала движущей силы арбитрирования из модуля 46 управления арбитрированием, модуль 48 распределения тормозной/движущей силы выводит информационный сигнал, аналогичный сигналу движущей силы арбитрирования, в модуль 50 управления движущей силой в качестве сигнала распределения движущей силы.
После приема сигнала тормозной силы арбитрирования из модуля 46 управления арбитрированием, модуль 48 распределения тормозной/движущей силы выводит информационный сигнал, аналогичный сигналу тормозной силы арбитрирования, в модуль 52 вычисления первой запрашиваемой тормозной силы в качестве сигнала распределения тормозной силы.
Модуль 50 управления движущей силой принимает информационные сигналы из модуля 48 распределения тормозной/движущей силы и модуля 14 вычисления скорости транспортного средства. Модуль 50 управления движущей силой обращается к движущей силе, включенной в сигнал распределения движущей силы, и скорости транспортного средства, включенной в сигнал скорости транспортного средства, и вычисляет значение команды управления током приведения в движение.
Значение команды управления током приведения в движение является значением команды управления током для генерирования, в приводном электромоторе DM, движущего момента в зависимости от движущей силы, включенной в сигнал распределения движущей силы.
Модуль 50 управления движущей силой выводит информационный сигнал, включающий в себя вычисленное значение команды управления током приведения в движение (в дальнейшем иногда называемый "сигналом движущего момента"), в модуль 42 определения уклона и инвертор INV.
Модуль 52 вычисления первой запрашиваемой тормозной силы заранее сохраняет первую карту тормозной силы, проиллюстрированную на фиг. 6.
Первая карта тормозной силы представляет собой карту, указывающую рекуперативную тормозную силу, сгенерированную в зависимости от скорости транспортного средства, и замедление в зависимости от рекуперативной тормозной силы.
Следует отметить, что "рекуперация", проиллюстрированная на фиг. 6, представляет собой область, соответствующую рекуперативной тормозной силе. "Предельная линия рекуперации", проиллюстрированная на фиг. 6, представляет собой линию, представляющую верхний предел рекуперативной тормозной силы в зависимости от скорости транспортного средства. Дополнительно, "первая пороговая скорость транспортного средства", проиллюстрированная на фиг. 6, соответствует граничной линии между зоной изменения, в которой верхний предел рекуперативной тормозной силы изменяется в зависимости от изменения скорости транспортного средства, и фиксированной зоной, в которой верхний предел рекуперативной тормозной силы является постоянным. Следует отметить, что первая пороговая скорость транспортного средства задается равной, например, 10 (км/ч). Соответственно, зона изменения на первой карте тормозной силы представляет собой зону, в которой запрашиваемое значение (запрос) рекуперативной тормозной силы изменяется относительно изменения скорости транспортного средства, вычисленной посредством модуля 14 вычисления скорости транспортного средства.
Другими словами, первая карта тормозной силы представляет собой карту для определения рекуперативной тормозной силы (величины рекуперации), сгенерированной в приводном электромоторе DM, посредством возврата скорости транспортного средства, вычисленной посредством модуля 14 вычисления скорости транспортного средства. Соответственно, первая карта тормозной силы указывает то, что когда скорость транспортного средства изменяется, замедление также изменяется.
Дополнительно, как проиллюстрировано на фиг. 6, предельная линия рекуперации является значениями для генерирования рекуперативной тормозной силы для остановки транспортного средства C, когда поверхность проезжей дороги, по которой движется транспортное средство C, является ровной (ровная дорога), и только когда транспортное средство C движется, т.е. скорость транспортного средства превышает 0 (км/ч). Соответственно, предельная линия рекуперации, используемая для движения по ровной поверхности на фиг. 6, представляет собой линию, представляющую верхний предел рекуперативной тормозной силы в зависимости от скорости транспортного средства в состоянии, в котором скорость транспортного средства составляет 0 (км/ч), и замедление и рекуперативная тормозная сила равны нулю.
Модуль 52 вычисления первой запрашиваемой тормозной силы обращается к скорректированной тормозной силе, включенной в сигнал распределения тормозной силы, который принимается из модуля 48 распределения тормозной/движущей силы, и скорости транспортного средства, включенной в сигнал скорости транспортного средства, который принимается из модуля 14 вычисления скорости транспортного средства, и вычисляет замедление, сгенерированное в транспортном средстве. Модуль 52 вычисления первой запрашиваемой тормозной силы вычисляет первую рекуперативную тормозную силу в качестве рекуперативной тормозной силы в зависимости от вычисленного замедления и выводит информационный сигнал, включающий в себя первую рекуперативную тормозную силу (в дальнейшем иногда называемый "сигналом первого запроса на торможение"), в модуль 6 управления фрикционной тормозной силой.
В частности, на первой карте тормозной силы, проиллюстрированной на фиг. 6, скорость транспортного средства, включенная в сигнал скорости транспортного средства, и скорректированная тормозная сила, включенная в сигнал распределения тормозной силы, возвращаются, и вычисляется первая рекуперативная тормозная сила.
Другими словами, модуль 52 вычисления первой запрашиваемой тормозной силы вычисляет первую рекуперативную тормозную силу в зависимости от скорректированной тормозной силы, полученной посредством коррекции базовой тормозной силы на основе направления уклона поверхности дороги и величины уклона.
Рабочая величина нажатия педали AP акселератора, которая равна или меньше рабочей величины переключения тормозной/движущей силы, соответствует рабочей величине нажатия педали AP акселератора, которая меньше порогового значения, заданного заранее.
Соответственно, модуль 52 вычисления первой запрашиваемой тормозной силы вычисляет первую рекуперативную тормозную силу (запрашиваемое значение рекуперативной тормозной силы) в зависимости от рабочей величины нажатия педали AP акселератора, которая равна или меньше рабочей величины переключения тормозной/движущей силы (т.е. меньше порогового значения, заданного заранее), и скорости движения транспортного средства.
Модуль 52 вычисления первой запрашиваемой тормозной силы вычисляет первую рекуперативную тормозную силу с предельной линией рекуперации в качестве верхнего предела таким образом, что когда рабочая величина нажатия педали AP акселератора, определенная посредством датчика APS акселератора, находится в пределах диапазона торможения до тех пор, пока транспортное средство не будет остановлено, скорость транспортного средства, вычисленная посредством модуля 14 вычисления скорости транспортного средства, уменьшается. Другими словами, модуль 52 вычисления первой запрашиваемой тормозной силы вычисляет рекуперативную тормозную силу для остановки транспортного средства в зависимости от рабочей величины нажатия педали AP акселератора, когда рабочая величина нажатия педали AP акселератора равна или меньше рабочей величины переключения тормозной/движущей силы.
Модуль 54 управления рекуперативной тормозной силой принимает, из модуля 6 управления фрикционной тормозной силой, сигнал значения запроса на рекуперацию. Дополнительно, из аккумулятора BAT, получается текущее состояние заряда (SOC). Модуль 54 управления рекуперативной тормозной силой обращается к запрашиваемому значению рекуперативной тормозной силы, включенному в сигнал значения запроса на рекуперацию, и текущему состоянию заряда аккумулятора BAT, и вычисляет результирующую фактическую величину рекуперативной тормозной силы.
Запрашиваемая величина рекуперативной тормозной силы является целевым значением рекуперативной тормозной силы, сгенерированной в приводном электромоторе DM.
Результирующая фактическая величина рекуперативной тормозной силы представляет собой рекуперативную тормозную силу, которая фактически генерируется в приводном электромоторе DM.
Если текущее состояние заряда является близким к полному заряду, и невозможно заряжать мощность, вырабатываемую посредством рекуперативного торможения, в аккумулятор BAT, вычисление выполняется посредством такого допущения, что результирующая фактическая величина рекуперативной тормозной силы равна нулю. Альтернативно, когда можно заряжать мощность, вырабатываемую посредством рекуперативного торможения, в аккумулятор BAT, вычисление выполняется посредством такого допущения, что запрашиваемая величина рекуперативной тормозной силы равна результирующей фактической величине рекуперативной тормозной силы (запрашиваемая величина рекуперативной тормозной силы=результирующая фактическая величина рекуперативной тормозной силы).
Модуль 54 управления рекуперативной тормозной силой, который вычисляет результирующую фактическую величину рекуперативной тормозной силы, вычисляет значение команды управления рекуперативным током.
Значение команды управления рекуперативным током является значением команды управления током для генерирования рекуперативного момента посредством приводного электромотора DM в зависимости от результирующей фактической величины рекуперативной тормозной силы.
Модуль 54 управления рекуперативной тормозной силой, который вычисляет значение команды управления рекуперативным током, выводит информационный сигнал, включающий в себя вычисленное значение команды управления рекуперативным током (в дальнейшем иногда называемый "сигналом рекуперативного момента"), в инвертор INV и модуль 6 управления фрикционной тормозной силой.
Соответственно, модуль 54 управления рекуперативной тормозной силой генерирует, в приводном электромоторе DM, рекуперативную тормозную силу в зависимости от запрашиваемого значения (запроса) рекуперативной тормозной силы, вычисленного посредством модуля 6 управления фрикционной тормозной силой. Следует отметить, что запрашиваемое значение (запрос) рекуперативной тормозной силы, вычисленное посредством модуля 6 управления фрикционной тормозной силой, является запрашиваемым значением (запросом) рекуперативной тормозной силы, выбранным посредством модуля 64 управления координацией рекуперативной тормозной силы, описанного ниже.
Подробные конфигурации модуля 44 коррекции тормозной/движущей силы
Модуль 44 коррекции тормозной/движущей силы, как проиллюстрировано на фиг. 7, включает в себя модуль 44a вычисления уравновешивающего момента, модуль 44b вычисления вспомогательного коэффициента усиления, модуль 44c коррекции на основе уклона и модуль 56 ограничения коррекции.
Модуль 44a вычисления уравновешивающего момента вычисляет уравновешивающий момент на основе направления и величины уклона, включенных в сигнал уклона поверхности дороги. Другими словами, модуль 44a вычисления уравновешивающего момента вычисляет уравновешивающий момент на основе того, представляет собой направление уклона поверхности дороги восходящее направление или направление вниз, и величины уклона поверхности дороги. Модуль 44a вычисления уравновешивающего момента выводит информационный сигнал, включающий в себя вычисленный уравновешивающий момент (в дальнейшем иногда называемый "сигналом уравновешивающего момента"), в модуль 44c коррекции на основе уклона.
Уравновешивающий момент представляет собой крутящий момент для обеспечения возможности транспортному средству C поддерживать остановленное состояние на поверхности проезжей дороги. Дополнительно, уравновешивающий момент вычисляется, например, на основе веса транспортного средства C, способности генерирования движущей силы, способности генерирования рекуперативной тормозной силы и способности генерирования фрикционной тормозной силы.
Соответственно, когда поверхность проезжей дороги, на которой транспортное средство C поддерживает остановленное состояние, представляет собой поверхность проезжей дороги, имеющую уклон с подъемом, уравновешивающий момент представляет собой движущий момент в зависимости от величины уклона с подъемом. С другой стороны, когда поверхность проезжей дороги, на которой транспортное средство C поддерживает остановленное состояние, представляет собой поверхность проезжей дороги, имеющую уклон под спуск, уравновешивающий момент представляет собой тормозной момент в зависимости от величины уклона под спуск.
Другими словами, модуль 44a вычисления уравновешивающего момента вычисляет движущий момент и тормозной момент на основе направления уклона поверхности дороги и величины уклона таким образом, что движущий момент и тормозной момент могут поддерживать остановленное состояние транспортного средства C на поверхности проезжей дороги, на которой величина уклона изменяется. Дополнительно, уравновешивающие моменты представляют собой движущий момент и тормозной момент, которые позволяют поддерживать остановленное состояние транспортного средства C на поверхности проезжей дороги, на которой величина уклона изменяется.
Модуль 44b вычисления вспомогательного коэффициента усиления вычисляет вспомогательный коэффициент усиления на основе направления и величины уклона, заданных заранее, и скорости транспортного средства, включенной в сигнал скорости транспортного средства. Затем модуль 44b вычисления вспомогательного коэффициента усиления выводит информационный сигнал, включающий в себя вычисленный уравновешивающий вспомогательный коэффициент усиления (в дальнейшем иногда называемый "сигналом вспомогательного коэффициента усиления"), в модуль 44c коррекции на основе уклона.
Вспомогательный коэффициент усиления вычисляется посредством ввода скорости транспортного средства, включенной в сигнал скорости транспортного средства, на карту вспомогательного коэффициента усиления, проиллюстрированную на фиг. 8. Следует отметить, что карта вспомогательного коэффициента усиления, проиллюстрированная на фиг. 8, указывает взаимосвязь между скоростью транспортного средства и вспомогательный коэффициентом усиления, когда транспортное средство C движется на поверхности дороги, имеющей уклон с подъемом.
В первом варианте осуществления, в качестве одного примера, описывается случай, в котором вспомогательный коэффициент усиления изменяется в диапазоне от 0 до 1 в зависимости от скорости транспортного средства.
Направление и величина уклона, заданные заранее, составляют, например, уклон в ±30% (уклон с подъемом 30% с ровной дорогой в качестве исходного уровня и уклон под спуск 30% с ровной дорогой в качестве исходного уровня). Дополнительно, карта вспомогательного коэффициента усиления формируется со вспомогательным моментом, сгенерированным с уклоном ±30% в качестве исходного уровня.
В первом варианте осуществления, в качестве одного примера, уклон в ±30% задается равным верхнему пределу величины уклона поверхности дороги, заданной заранее. Следует отметить, что уклон в ±30% задается, например, на основе способности к движению (способности преодолевать уклоны) транспортного средства C. Таким образом, когда устройство 1 управления тормозной/движущей силой согласно первому варианту осуществления применяется к транспортному средству, имеющему отличающуюся способность к движению (способность преодолевать уклоны) относительно транспортного средства C, уклон, например, может составлять уклон в ±20% или уклон в ±40%.
Соответственно, в первом варианте осуществления, степень уменьшения вспомогательного коэффициента усиления, который уменьшается по мере того, как возрастает скорость транспортного средства, задается на основе верхнего предела величины уклона поверхности дороги, заданной заранее. В частности, когда уклон является большим, степень уменьшения вспомогательного коэффициента усиления, который уменьшается по мере того, как возрастает скорость транспортного средства, является небольшой. Дополнительно, когда уклон является большим, степень уменьшения вспомогательного коэффициента усиления, который уменьшается по мере того, как возрастает скорость транспортного средства, является большой.
Карта вспомогательного коэффициента усиления, проиллюстрированная на фиг. 8, формируется аналогично карте тормозной/движущей силы, проиллюстрированной на фиг. 5, так что степень изменения вспомогательного коэффициента усиления относительно изменения скорости транспортного средства, вычисленной посредством модуля 14 вычисления скорости транспортного средства, равна или меньше предельного усиления системы управления. Другими словами, на карте вспомогательного коэффициента усиления, проиллюстрированной на фиг. 8, степень уменьшения вспомогательного коэффициента усиления, который уменьшается по мере того, как возрастает скорость транспортного средства, равна или меньше предельного усиления системы управления.
Из вышеозначенного, модуль 44b вычисления вспомогательного коэффициента усиления вычисляет вспомогательный коэффициент усиления, который является максимальным значением, когда скорость транспортного средства представляет собой заданную скорость транспортного средства, заданную заранее, и уменьшается с максимального значения по мере того, как возрастает скорость транспортного средства относительно заданной скорости транспортного средства.
В первом варианте осуществления, в качестве одного примера, описывается случай, в котором заданная скорость транспортного средства задается равной 0 (км/ч).
Дополнительно, в первом варианте осуществления, в качестве одного примера, максимальное значение степени уменьшения вспомогательного коэффициента усиления задается равным 50% (половине вспомогательного коэффициента усиления, когда скорость транспортного средства составляет 0 (км/ч)).
Модуль 44c коррекции на основе уклона принимает информационные сигналы из модуля 40 вычисления базовой тормозной/движущей силы, модуля 44a вычисления уравновешивающего момента и модуля 44b вычисления вспомогательного коэффициента усиления. Модуль 44c коррекции на основе уклона корректирует целевой тормозной момент или целевой движущий момент, включенный в сигнал базового движущего момента, с использованием уравновешивающего момента, включенного в сигнал уравновешивающего момента, и вспомогательного коэффициента усиления, включенного в сигнал вспомогательного коэффициента усиления.
Модуль 44c коррекции на основе уклона, который корректирует целевой тормозной момент с использованием уравновешивающего момента и вспомогательного коэффициента усиления, выводит информационный сигнал, включающий в себя скорректированный целевой тормозной момент, который представляет собой скорректированную тормозную силу (в дальнейшем иногда называемый "сигналом скорректированной тормозной силы"), в модуль 56 ограничения коррекции.
С другой стороны, модуль 44c коррекции на основе уклона, который корректирует целевой движущий момент с использованием уравновешивающего момента и вспомогательного коэффициента усиления, выводит информационный сигнал, включающий в себя скорректированный целевой движущий момент, который представляет собой скорректированную движущую силу (в дальнейшем иногда называемый "сигналом скорректированной движущей силы"), в модуль 56 ограничения коррекции.
Скорректированная тормозная сила и скорректированная движущая сила представляются как изображения на "карте скорректированной тормозной/движущей силы", проиллюстрированной на фиг. 9.
Карта скорректированной тормозной/движущей силы, например, как проиллюстрировано на фиг. 9, представляет собой карту, указывающую взаимосвязь между скоростью транспортного средства, рабочей величиной (степенью открытия) педали AP акселератора и крутящим моментом (движущим моментом, тормозным моментом), сгенерированным в транспортном средстве.
Карта скорректированной тормозной/движущей силы представляет собой карту, полученную посредством коррекции "T-MIN1" и "T-MAX1" на карте тормозной/движущей силы на основе уравновешивающего момента и вспомогательного коэффициента усиления. Следует отметить, что карта скорректированной тормозной/движущей силы, проиллюстрированная на фиг. 9, указывает случай, в котором крутящий момент, сгенерированный в транспортном средстве C (движущий момент, тормозной момент), корректируется на основе скорости транспортного средства и рабочей величины нажатия педали AP акселератора, когда транспортное средство C движется на поверхности дороги, имеющей уклон с подъемом.
Следует отметить, что аналогично фиг. 5, рабочая величина (степень открытия) педали AP акселератора обозначается с помощью ссылки с номером "APO". Дополнительно, на фиг. 9, аналогично фиг. 5, крутящий момент, сгенерированный в зависимости от скорости транспортного средства, когда рабочая величина нажатия педали AP акселератора является минимальным значением (нерабочим), обозначается с помощью ссылки с номером "T-MIN1". На фиг. 9, аналогично фиг. 5, крутящий момент, сгенерированный в зависимости от скорости транспортного средства, когда рабочая величина нажатия педали AP акселератора является максимальным значением (рабочая величина нажатия педали является максимальной), обозначается с помощью ссылки с номером "T-MAX1".
На фиг. 9, аналогично фиг. 5, движущий момент и тормозной момент представляются на продольной оси с 0 в качестве граничной линии.
В процессе коррекции "T-MIN1" и "T-MAX1" из карты тормозной/движущей силы, во-первых, уравновешивающий момент, вычисленный посредством модуля 44a вычисления уравновешивающего момента, умножается на вспомогательный коэффициент усиления, вычисленный посредством модуля 44b вычисления вспомогательного коэффициента усиления. "T-MIN1" и "T-MAX1" из карты тормозной/движущей силы корректируются на основе значения, полученного посредством умножения уравновешивающего момента на вспомогательный коэффициент усиления. Соответственно, крутящий момент, сгенерированный в транспортном средстве C, корректируется.
Следует отметить, что на фиг. 9, значение, полученное посредством коррекции "T-MIN1" из карты тормозной/движущей силы на основе значения, полученного посредством умножения уравновешивающего момента на вспомогательный коэффициент усиления, обозначается с помощью ссылки с номером "T-MIN2". Дополнительно, на фиг. 9, значение, полученное посредством коррекции "T-MAX1" из карты тормозной/движущей силы на основе значения, полученного посредством умножения уравновешивающего момента на вспомогательный коэффициент усиления, обозначается с помощью ссылки с номером "T-MAX2".
Дополнительно, на фиг. 9, значение, полученное посредством коррекции "T-MIN1" из карты тормозной/движущей силы на основе уравновешивающего момента, обозначается с помощью ссылки с номером "T-MIN3". Дополнительно, на фиг. 9, значение, полученное посредством коррекции "T-MAX1" из карты тормозной/движущей силы только на основе уравновешивающего момента, обозначается с помощью ссылки с номером "T-MAX3".
Соответственно, "T-MIN2", полученный посредством коррекции "T-MIN1" на основе значения, полученного посредством умножения уравновешивающего момента на вспомогательный коэффициент усиления, принимает меньшее значение, чем значение "T-MIN3", полученное посредством коррекции "T-MIN1" только на основе уравновешивающего момента, когда скорость транспортного средства является высокой. Аналогично, "T-MAX2", полученный посредством коррекции "T-MAX1" на основе значения, полученного посредством умножения уравновешивающего момента на вспомогательный коэффициент усиления, принимает меньшее значение, чем значение "T-MAX3", полученное посредством коррекции "T-MAX1" только на основе уравновешивающего момента, когда скорость транспортного средства является высокой.
Относительно "T-MIN2" и "T-MIN3", в области, не большей базовой пороговой скорости транспортного средства из карты тормозной/движущей силы, аналогично "T-MIN1", степень изменения крутящего момента относительно изменения скорости транспортного средства, вычисленной посредством модуля 14 вычисления скорости транспортного средства, равна или меньше предельного усиления системы управления. Другими словами, относительно "T-MIN2" и "T-MIN3", в области, не большей базовой пороговой скорости транспортного средства, степень изменения крутящего момента относительно изменения скорости транспортного средства, вычисленной посредством модуля 14 вычисления скорости транспортного средства, равна или меньше предельного усиления системы управления в состоянии, в котором рабочая величина нажатия педали AP акселератора является минимальным значением. Следует отметить, что фиг. 9 иллюстрирует предельное усиление системы управления, которое изменяется в зависимости от уравновешивающего момента.
Как проиллюстрировано на фиг. 9, когда транспортное средство C движется по поверхности дороги, имеющей уклон с подъемом, крутящий момент в состоянии, в котором рабочая величина нажатия педали AP акселератора является минимальным значением, становится тормозным моментом или движущим моментом в зависимости от скорости транспортного средства.
Модуль 56 ограничения коррекции принимает информационные сигналы из модуля 44c коррекции на основе уклона, датчика APS акселератора, модуля 26 вывода состояния ITS-управления и модуля 46 управления арбитрированием.
Модуль 56 ограничения коррекции, как проиллюстрировано на фиг. 10, включает в себя модуль 56a задания предельных значений, модуль 56b хранения верхних предельных значений, модуль 56c хранения нижних предельных значений, модуль 56d умножения предельных значений, модуль 56e переключения верхних предельных значений, модуль 56f коррекции верхних предельных значений и модуль 56g обработки ограничений.
Модуль 56a задания предельных значений заранее сохраняет карту, указывающую взаимосвязь между рабочей величиной (степенью открытия) педали AP акселератора и предельным значением коррекции на основе уклона, используемым для процесса ограничения скорректированной тормозной силы и скорректированной движущей силы (см. чертеж). Следует отметить, что, на чертеже, рабочая величина (степень открытия) педали AP акселератора обозначается с помощью ссылки с номером "APO" и представляется на продольной оси. Аналогично, на чертеже, предельное значение коррекции на основе уклона представляется на продольной оси.
Модуль 56a задания предельных значений принимает, из датчика APS акселератора, информационный сигнал, включающий в себя рабочую величину нажатия педали AP акселератора (рабочую величину тормозной/движущей силы). Модуль 56a задания предельных значений вводит рабочую величину нажатия педали AP акселератора в сохраненную карту и задает предельное значение коррекции на основе уклона. Дополнительно, модуль 56a задания предельных значений выводит заданное предельное значение коррекции на основе уклона в модуль 56d умножения предельных значений.
Следует отметить, что в первом варианте осуществления, в качестве одного примера, как проиллюстрировано на чертеже, описывается случай, в котором модуль 56a задания предельных значений задает постоянное предельное значение коррекции на основе уклона (например, 0,2) независимо от рабочей величины нажатия педали AP акселератора.
Модуль 56b хранения верхних предельных значений сохраняет верхнее предельное значение, заданное заранее.
Верхнее предельное значение представляет собой верхний предел, используемый для процесса ограничения скорректированной тормозной силы или скорректированной движущей силы.
Модуль 56c хранения нижних предельных значений сохраняет нижнее предельное значение, заданное заранее.
Нижнее предельное значение является нижним предельным значением, используемым для процесса ограничения скорректированной тормозной силы или скорректированной движущей силы.
Модуль 56d умножения предельных значений умножает предельное значение коррекции на основе уклона, заданное посредством модуля 56a задания предельных значений, на верхнее предельное значение, сохраненное посредством модуля 56b хранения верхних предельных значений. Модуль 56d умножения предельных значений выводит умноженное значение в модуль 56e переключения верхних предельных значений.
Модуль 56e переключения верхних предельных значений формируется посредством использования, например, переключающей схемы. Модуль 56e переключения верхних предельных значений может переключать состояние между состоянием, в котором модуль 56d умножения предельных значений соединяется с модулем 56f коррекции верхних предельных значений, и состоянием, в котором модуль 56b хранения предельных значений соединяется с модулем 56f коррекции верхних предельных значений.
Модуль 56e переключения верхних предельных значений обращается к сигналу определения согласно ITS, вводимому из модуля 26 вывода состояния ITS-управления, и сигналу определения Dr-перехвата управления, принимаемому из модуля 46 управления арбитрированием. Когда соответствующие информационные сигналы включают в себя результат определения, в котором тормозная сила или движущая сила управляется в зависимости от автоматического управления скоростью или объекта управления, и результат определения, в котором перехват управления водителем не устанавливается, модуль 56d умножения предельных значений соединяется с модулем 56f коррекции верхних предельных значений. С другой стороны, когда соответствующие информационные сигналы включают в себя результат определения, в котором тормозная сила или движущая сила управляется в зависимости от автоматического управления скоростью или объекта управления, и результат определения, в котором перехват управления водителем устанавливается, модуль 56b хранения верхних предельных значений соединяется с модулем 56f коррекции верхних предельных значений.
Следует отметить, что фиг. 10 иллюстрирует случай, в котором модуль 56e переключения верхних предельных значений переключается в состояние, в котором модуль 56d умножения предельных значений соединяется с модулем 56f коррекции верхних предельных значений.
В зависимости от состояния соединения, переключаемого посредством модуля 56e переключения верхних предельных значений, модуль 56f коррекции верхних предельных значений применяет модуль ограничения темпа изменения к значению, полученному посредством умножения предельного значения коррекции на основе уклона на верхнее предельное значение или верхнее предельное значение, чтобы подавлять внезапное изменение во время вывода. Модуль 56f коррекции верхних предельных значений выводит значение, обработанное посредством модуля ограничения темпа изменения, в модуль 56g обработки ограничений.
Модуль 56g обработки ограничений использует значение, принимаемое из модуля 56f коррекции верхних предельных значений, и нижнее предельное значение, сохраненное посредством модуля 56c хранения нижних предельных значений, чтобы проводить процесс ограничения скорректированной тормозной силы или скорректированной движущей силы, включенной в информационный сигнал, принимаемый из модуля 44c коррекции на основе уклона.
В частности, верхний предел скорректированной тормозной силы или скорректированной движущей силы ограничен значением, принимаемым из модуля 56f коррекции верхних предельных значений. Дополнительно, нижнее предельное значение скорректированной тормозной силы или скорректированной движущей силы ограничено нижним предельным значением.
Другими словами, модуль 56g обработки ограничений проводит процесс ограничения скорректированной тормозной силы или скорректированной движущей силы диапазоном между значением, принимаемым из модуля 56f коррекции верхних предельных значений, и нижним предельным значением.
Модуль 56 ограничения коррекции, который ограничивает скорректированную тормозную силу, выводит информационный сигнал, включающий в себя ограниченную скорректированную тормозную силу, которая представляет собой ограниченную тормозную силу (в дальнейшем иногда называемый "сигналом ограниченной тормозной силы"), в модуль 46 управления арбитрированием.
С другой стороны, модуль 56 ограничения коррекции, который ограничивает скорректированную движущую силу, выводит информационный сигнал, включающий в себя ограниченную скорректированную движущую силу, которая представляет собой ограниченную движущую силу (в дальнейшем иногда называемый "сигналом ограниченной движущей силы"), в модуль 46 управления арбитрированием.
Из вышеозначенного, модуль 56 ограничения коррекции проводит процесс ограничения скорректированной тормозной силы или скорректированной движущей силы с использованием значения, полученного посредством умножения предельного значения коррекции на основе уклона на верхнее предельное значение либо верхнее предельное значение и нижнее предельное значение.
Дополнительно, в первом варианте осуществления, процесс посредством модуля 56f коррекции верхних предельных значений с использованием модуля ограничения темпа изменения подавляет быстрое изменение тормозной силы в начале и в конце процесса для ограничения скорректированной тормозной силы, чтобы обеспечивать плавный процесс. Аналогично, в начале и в конце процесса для ограничения скорректированной движущей силы, быстрое изменение движущей силы может подавляться, и плавный процесс может проводиться.
Модуль 44 коррекции тормозной/движущей силы корректирует базовую тормозную силу или базовую движущую силу в зависимости от направления уклона поверхности дороги и величины уклона и затем вычисляет скорректированную тормозную силу или скорректированную движущую силу.
В частности, когда модуль 42 определения уклона определяет то, что направление уклона поверхности дороги представляет собой восходящее направление, и величина уклона, определенная посредством модуля 42 определения уклона, увеличивается в восходящем направлении, тормозная сила, сгенерированная в транспортном средстве C, задается равной скорректированной тормозной силе, полученной посредством коррекции, чтобы уменьшать базовую тормозную силу в зависимости от величины уклона. Альтернативно, движущая сила, сгенерированная в транспортном средстве C, задается равной скорректированной движущей силе, полученной посредством коррекции, чтобы увеличивать базовую движущую силу в зависимости от величины уклона.
С другой стороны, когда модуль 42 определения уклона определяет то, что направление уклона поверхности дороги представляет собой направление вниз, и величина уклона, определенная посредством модуля 42 определения уклона увеличивается в направлении вниз, тормозная сила, сгенерированная в транспортном средстве C, задается равной скорректированной тормозной силе, полученной посредством коррекции, чтобы увеличивать базовую тормозную силу в зависимости от величины уклона. Альтернативно, движущая сила, сгенерированная в транспортном средстве C, задается равной скорректированной движущей силе, полученной посредством коррекции, чтобы уменьшать базовую движущую силу в зависимости от величины уклона.
Следует отметить, что состояние, в котором направление уклона поверхности дороги увеличивается в восходящем направлении, включает в себя состояние, в котором поверхность проезжей дороги изменяется с ровной дороги на подъем, и состояние, в котором поверхность проезжей дороги изменяется с подъема на подъем, имеющий больший уклон в восходящем направлении. Дополнительно, состояние, в котором направление уклона поверхности дороги увеличивается в восходящем направлении, включает в себя состояние, в котором поверхность проезжей дороги изменяется со спуска на спуск, имеющий небольшой уклон в направлении вниз.
Дополнительно, состояние, в котором направление уклон поверхности дороги увеличивается в направлении вниз, включает в себя состояние, в котором поверхность проезжей дороги изменяется с ровной дороги на спуск, и состояние, в котором поверхность проезжей дороги изменяется со спуска на спуск, имеющий больший уклон в направлении вниз. Дополнительно, состояние, в котором направление уклон поверхности дороги увеличивается в направлении вниз, включает в себя состояние, в котором поверхность проезжей дороги изменяется с подъема на подъем, имеющий небольшой уклон в восходящем направлении.
Дополнительно, модуль 44 коррекции тормозной/движущей силы задает скорректированную тормозную силу или скорректированную движущую силу таким образом, что когда рабочая величина нажатия педали AP акселератора меньше порогового значения, тормозная сила (замедление) возникает в транспортном средстве C, и альтернативно, когда рабочая величина нажатия педали AP акселератора равна или выше порогового значения, движущая сила (ускорение) возникает в транспортном средстве C.
Модуль 44 коррекции тормозной/движущей силы непрерывно корректирует таким образом, чтобы увеличивать или уменьшать базовую тормозную силу и базовую движущую силу, вычисленную посредством карты тормозной/движущей силы, в зависимости от уравновешивающего момента, вычисленного посредством модуля 44a вычисления уравновешивающего момента.
Дополнительно, модуль 44 коррекции тормозной/движущей силы непрерывно корректирует таким образом, чтобы увеличивать или уменьшать базовую тормозную силу и базовую движущую силу, вычисленную посредством карты тормозной/движущей силы. Коррекция выполняется на основе значения, полученного посредством умножения уравновешивающего момента, вычисленного посредством модуля 44a вычисления уравновешивающего момента, на вспомогательный коэффициент усиления, вычисленный посредством модуля 44b вычисления вспомогательного коэффициента усиления.
Соответственно, модуль 44 коррекции тормозной/движущей силы корректирует базовую тормозную силу на основе направления уклона поверхности дороги и величины уклона таким образом, чтобы задавать скорректированную тормозную силу. Дополнительно, модуль 44 коррекции тормозной/движущей силы корректирует базовую движущую силу на основе направления уклона поверхности дороги и величины уклона таким образом, чтобы задавать скорректированную движущую силу.
Как описано выше, модуль 44 коррекции тормозной/движущей силы, когда величина уклона поверхности дороги увеличивается, корректирует таким образом, чтобы увеличивать базовую движущую силу на основе величины уклона поверхности дороги, или корректирует таким образом, чтобы уменьшать базовую тормозную силу на основе величины уклона поверхности дороги. Модуль 44 коррекции тормозной/движущей силы, когда величина уклона поверхности дороги уменьшается, корректирует таким образом, чтобы уменьшать базовую движущую силу на основе величины уклона поверхности дороги, или корректирует таким образом, чтобы увеличивать базовую тормозную силу на основе величины уклона поверхности дороги.
Подробные конфигурации модуля 6 управления фрикционной тормозной силой
Модуль 6 управления фрикционной тормозной силой, как проиллюстрировано на фиг. 11, включает в себя модуль 60 вычисления второй запрашиваемой тормозной силы, модуль 62 суммирования запрашиваемых тормозных сил, модуль 64 управления координацией рекуперативной тормозной силы, модуль 66 вычисления фрикционной тормозной силы и модуль 68 управления тормозным гидравлическим давлением.
Модуль 60 вычисления второй запрашиваемой тормозной силы принимает, от датчика BPS тормоза, информационный сигнал, включающий в себя рабочую величину (рабочую величину тормозной силы) нажатия педали BP тормоза. Дополнительно, модуль 60 вычисления второй запрашиваемой тормозной силы принимает, из модуля 14 вычисления скорости транспортного средства, сигнал скорости транспортного средства.
Следует отметить, что педаль BP тормоза представляет собой педаль, предоставленную в транспортном средстве, представляет собой педаль, нажимаемую водителем транспортного средства в ответ на запрос на тормозную силу, и предоставляется отдельно от педали AP акселератора.
Модуль 60 вычисления второй запрашиваемой тормозной силы заранее сохраняет вторую карту тормозной силы, проиллюстрированную на фиг. 12.
Вторая карта тормозной силы представляет собой карту, указывающую тормозную силу (рекуперативную тормозную силу, фрикционную тормозную силу), которая генерируется в зависимости от рабочей величины нажатия педали BP тормоза и скорости движения (скорости транспортного средства) транспортного средства C.
Следует отметить, что "рекуперация" на фиг. 12 представляет собой область, соответствующую рекуперативной тормозной силе. Дополнительно, "трение" на фиг. 12 представляет собой область, соответствующую фрикционной тормозной силе. Дополнительно, "линия распределения координации рекуперативной тормозной силы" на фиг. 12, представляет собой линию, представляющую верхний предел рекуперативной тормозной силы в зависимости от рабочей величины нажатия педали BP тормоза и скорости транспортного средства.
"Вторая пороговая скорость транспортного средства" на фиг. 12 соответствует граничной линии между зоной изменения, в которой верхний предел рекуперативной тормозной силы изменяется в зависимости от изменения скорости транспортного средства, и фиксированной зоной, в которой верхний предел рекуперативной тормозной силы является постоянным. Следует отметить, что вторая пороговая скорость транспортного средства задается равной, например, 10 (км/ч). Соответственно, зона изменения на второй карте тормозной силы представляет собой зону, в которой запрашиваемое значение рекуперативной тормозной силы изменяется относительно изменения скорости транспортного средства, вычисленной посредством модуля 14 вычисления скорости транспортного средства.
"Предельное усиление системы управления" на фиг. 12, представляет собой верхний предел степени изменения рекуперативной тормозной силы в зависимости от скорости транспортного средства, не большей второй пороговой скорости транспортного средства. Дополнительно, линия, представленная посредством предельного усиления системы управления на фиг. 12, аналогично линии, представленной посредством предельного усиления системы управления на фиг. 6, соответствует граничной линии между состоянием, в котором управление значением команды управления током является стабильным, и состоянием, в котором управление значением команды управления током является нестабильным. Другими словами, предельное усиление системы управления на фиг. 12 представляет собой верхний предел степени изменения замедления в зависимости от рекуперативной тормозной силы относительно скорости транспортного средства, при которой изменение скорости транспортного средства, вычисленное посредством модуля 14 вычисления скорости транспортного средства, может следовать за изменением замедления в зависимости от рекуперативной тормозной силы.
Соответственно, в зоне изменения второй карты тормозной силы, степень изменения запрашиваемого значения рекуперативной тормозной силы (замедление в зависимости от рекуперативной тормозной силы) относительно изменения скорости транспортного средства, вычисленной посредством модуля 14 вычисления скорости транспортного средства, равна или меньше предельного усиления системы управления.
"Предельная скорость транспортного средства для рекуперации" на фиг. 12 соответствует граничной линии между областью, в которой тормозная сила в зависимости от рабочей величины нажатия педали BP тормоза и скорости транспортного средства генерируется только с фрикционной тормозной силой, и областью, в которой тормозная сила в зависимости от рабочей величины нажатия педали BP тормоза и скорости транспортного средства генерируется, по меньшей мере, с рекуперативной тормозной силой из рекуперативной тормозной силы и фрикционной тормозной силы.
Как проиллюстрировано на фиг. 12, предельная скорость транспортного средства для рекуперации задается равной значению для генерирования тормозной силы, которая зависит от рабочей величины нажатия педали BP тормоза и скорости транспортного средства, только с фрикционной тормозной силой, когда транспортное средство C замедляется, и в состоянии, в котором скорость транспортного средства превышает нуль, т.е. в состоянии до того, как движущееся транспортное средство C останавливается. Это обусловлено тем, что в состоянии, в котором скорость транспортного средства равна или меньше предельной скорости транспортного средства для рекуперации (например, 3 (км/ч)), потребляемая мощность посредством приводного электромотора DM, чтобы генерировать рекуперативную тормозную силу, превышает мощность, вырабатываемую посредством рекуперативной тормозной силы, в качестве всего транспортного средства, эффективность использования энергии понижается.
Чтобы поддерживать остановленное состояние транспортного средства C (чтобы поддерживать состояние, в котором скорость транспортного средства равна 0 (км/ч)), фрикционная тормозная сила предпочтительно используется вместо использования рекуперативной тормозной силы, чтобы иметь хорошую эффективность использования энергии. Таким образом, когда педаль BP тормоза нажимается, и остановленное состояние транспортного средства C поддерживается, генерируется только фрикционная тормозная сила.
Соответственно, линия распределения координации рекуперативной тормозной силы является значением для генерирования рекуперативной тормозной силы только тогда, когда транспортное средство C движется.
Модуль 60 вычисления второй запрашиваемой тормозной силы обращается к рабочей величине нажатия педали BP тормоза и скорости транспортного средства, включенной в сигнал скорости транспортного средства, и вычисляет второй запрос на торможение, который является запросом (запрашиваемым значением) тормозной силы в зависимости от рабочей величины нажатия педали BP тормоза и скорости транспортного средства.
Второй запрос на торможение включает в себя, по меньшей мере, одно из запрашиваемых значений из запрашиваемого значения рекуперативной тормозной силы (второй рекуперативной тормозной силы) и запрашиваемого значения фрикционной тормозной силы, которые зависят от рабочей величины нажатия педали BP тормоза и скорости транспортного средства.
Запрашиваемые значения рекуперативной тормозной силы и фрикционной тормозной силы в зависимости от рабочей величины нажатия педали BP тормоза и скорости транспортного средства вычисляются посредством возврата, на вторую карту тормозной силы на фиг. 12, например, скорости транспортного средства, включенной в сигнал скорости транспортного средства, и тормозной силы в зависимости от рабочей величины нажатия педали BP тормоза. Следует отметить, что когда скорость транспортного средства, включенная в сигнал скорости транспортного средства, превышает вторую пороговую скорость транспортного средства, вычисление выполняется посредством такого допущения, что запрашиваемое значение фрикционной тормозной силы равно нулю.
Модуль 60 вычисления второй запрашиваемой тормозной силы, который вычисляет второй запрос на торможение, выводит информационный сигнал, включающий в себя второй запрос на торможение (в дальнейшем иногда называемый "сигналом второго запроса на торможение"), в модуль 62 суммирования запрашиваемых тормозных сил.
Соответственно, когда педаль BP тормоза нажимается, модуль 60 вычисления второй запрашиваемой тормозной силы вычисляет запрашиваемое значение (запрос) рекуперативной тормозной силы (второй рекуперативной тормозной силы) на основе рабочей величины нажатия педали BP тормоза и скорости движения транспортного средства C с линией распределения координации рекуперативной тормозной силы в качестве верхнего предела. Дополнительно, когда педаль BP тормоза нажимается, модуль 60 вычисления второй запрашиваемой тормозной силы вычисляет тормозную силу, превышающую линию распределения координации рекуперативной тормозной силы, в качестве запрашиваемого значения (запроса) фрикционной тормозной силы на основе рабочей величины нажатия педали BP тормоза и скорости движения транспортного средства C.
Дополнительно, модуль 60 вычисления второй запрашиваемой тормозной силы вычисляет второй запрос на торможение таким образом, что участок тормозных сил в зависимости от рабочей величины нажатия педали BP тормоза, определенной посредством датчика BPS тормоза, тормозная сила, превышающая линию распределения координации рекуперативной тормозной силы, генерируется с фрикционной тормозной силой.
Модуль 60 вычисления второй запрашиваемой тормозной силы, только когда скорость транспортного средства превышает предельную скорость транспортного средства для рекуперации с линией распределения координации рекуперативной тормозной силы в качестве верхнего предела, вычисляет вторую рекуперативную тормозную силу.
Модуль 62 суммирования запрашиваемых тормозных сил принимает, из первого модуля 52 вычисления запрашиваемой тормозной силы и модуля 60 вычисления второй запрашиваемой тормозной силы, информационные сигналы.
Модуль 62 суммирования запрашиваемых тормозных сил выводит информационный сигнал, включающий в себя первую рекуперативную тормозную силу (в дальнейшем иногда называемый "сигналом первой рекуперативной тормозной силы"), в модуль 64 управления координацией рекуперативной тормозной силы. Дополнительно, модуль 62 суммирования запрашиваемых тормозных сил, когда второй запрос на торможение включает в себя вторую рекуперативную тормозную силу, выводит информационный сигнал, включающий в себя вторую рекуперативную тормозную силу (в дальнейшем иногда называемый "сигналом второй рекуперативной тормозной силы"), в модуль 64 управления координацией рекуперативной тормозной силы.
Модуль 62 суммирования запрашиваемых тормозных сил суммирует первую рекуперативную тормозную силу, включенную в сигнал первого запроса на торможение, и второй запрос на торможение, включенный в сигнал второго запроса на торможение. Другими словами, модуль 62 суммирования запрашиваемых тормозных сил суммирует первую рекуперативную тормозную силу, вычисленную посредством модуля 52 вычисления первой запрашиваемой тормозной силы, и вторую рекуперативную тормозную силу и фрикционную тормозную силу, которые вычисляются посредством модуля 60 вычисления второй запрашиваемой тормозной силы.
Модуль 62 суммирования запрашиваемых тормозных сил, который суммирует каждую из тормозных сил, выводит информационный сигнал, включающий в себя запрашиваемое значение (запрашиваемую тормозную силу после суммирования) суммированной тормозной силы (в дальнейшем иногда называемый "сигналом суммированной тормозной силы"), в модуль 66 вычисления фрикционной тормозной силы.
Модуль 64 управления координацией рекуперативной тормозной силы принимает, из модуля 62 суммирования запрашиваемых тормозных сил, любой из сигнала первой рекуперативной тормозной силы и сигнала второй рекуперативной тормозной силы.
Модуль 64 управления координацией рекуперативной тормозной силы, с использованием запрашиваемой тормозной силы после суммирования, включенной в сигнал суммированной тормозной силы, выбирает запрашиваемое значение (верхний предел) рекуперативной тормозной силы.
Модуль 64 управления координацией рекуперативной тормозной силы, который выбирает запрашиваемое значение рекуперативной тормозной силы, выводит сигнал значения запроса на рекуперацию, который представляет собой информационный сигнал, включающий в себя выбранное запрашиваемое значение, в модуль 54 управления рекуперативной тормозной силой.
В частности, модуль 64 управления координацией рекуперативной тормозной силы сравнивает первую рекуперативную тормозную силу, включенную в сигнал первой рекуперативной тормозной силы, со второй рекуперативной тормозной силой, включенной в сигнал второй рекуперативной тормозной силы, и выбирает большую рекуперативную тормозную силу (выбор высокого уровня). Затем модуль 64 управления координацией рекуперативной тормозной силы выбирает эту рекуперативную тормозную силу в качестве запрашиваемого значения рекуперативной тормозной силы.
Другими словами, когда модуль 64 управления координацией рекуперативной тормозной силы выбирает запрашиваемое значение рекуперативной тормозной силы, модуль 64 управления координацией рекуперативной тормозной силы вводит, на карту, проиллюстрированную на фиг. 13, например, первую рекуперативную тормозную силу и вторую рекуперативную тормозную силу, которые зависят от идентичной скорости транспортного средства. Модуль 64 управления координацией рекуперативной тормозной силы выбирает бóльшую рекуперативную тормозную силу из первой рекуперативной тормозной силы и второй рекуперативной тормозной силы.
Карта (карта выбора рекуперативной тормозной силы), проиллюстрированная на фиг. 13, представляет собой карту, указывающую взаимосвязь между первой рекуперативной тормозной силой, второй рекуперативной тормозной силой и скоростью транспортного средства.
Следует отметить, что "предельная линия рекуперации", проиллюстрированная на фиг. 13, является аналогичной "предельной линии рекуперации", проиллюстрированной на фиг. 6, и "линия распределения координации рекуперативной тормозной силы", проиллюстрированная на фиг. 13, является аналогичной "линии распределения координации рекуперативной тормозной силы", проиллюстрированной на фиг. 12.
"Верхний предел запроса на рекуперацию", проиллюстрированный на фиг. 13, представляет собой линию, полученную посредством продолжения значений, каждое из которых является большим из значения на предельной линии рекуперации и значения на линии распределения координации рекуперативной тормозной силы при идентичной скорости транспортного средства.
"Пороговая скорость транспортного средства" на фиг. 13 соответствует граничной линии между зоной изменения, в которой верхний предел рекуперативной тормозной силы изменяется в зависимости от изменения скорости транспортного средства, и фиксированной зоной, в которой верхний предел рекуперативной тормозной силы является постоянным. Следует отметить, что пороговая скорость транспортного средства, аналогично первой пороговой скорости транспортного средства и второй пороговой скорости транспортного средства, задается равной, например, 10 (км/ч).
"Предельное усиление системы управления", проиллюстрированное на фиг. 3, является аналогичным "предельному усилению системы управления", проиллюстрированному на фиг. 5, 6, 8 и 9.
"Скорость транспортного средства для переключения", проиллюстрированная на фиг. 13, соответствует граничной линии между областью, в которой верхний предел запроса на рекуперацию представляет собой предельную линию рекуперации, и областью, в которой верхний предел запроса на рекуперацию представляет собой линию распределения координации рекуперативной тормозной силы. Дополнительно, "предельная скорость транспортного средства для рекуперации" на фиг. 13 является аналогичной "предельной скорости транспортного средства для рекуперации" на фиг. 12.
Следует отметить, что скорость транспортного средства для переключения задается заранее, например, на основе технических требований по рабочим характеристикам (веса автомобиля, рабочих характеристик приводного электромотора DM и т.п.) транспортного средства C.
Из вышеозначенного, модуль 64 управления координацией рекуперативной тормозной силы, при замедлении, когда педаль BP тормоза нажимается, выбирает бóльшую рекуперативную тормозную силу из первой рекуперативной тормозной силы, вычисленной посредством модуля 52 вычисления первой запрашиваемой тормозной силы, или второй рекуперативной тормозной силы, вычисленной посредством модуля 60 вычисления второй запрашиваемой тормозной силы.
Как проиллюстрировано на фиг. 13, верхний предел запроса на рекуперацию является эквивалентным линии распределения координации рекуперативной тормозной силы в области, в которой скорость транспортного средства равна или выше скорости транспортного средства для переключения. Дополнительно, верхний предел запроса на рекуперацию является эквивалентным предельной линии рекуперации в области, в которой скорость транспортного средства меньше скорости транспортного средства для переключения.
Соответственно, модуль 64 управления координацией рекуперативной тормозной силы, если транспортное средство C движется (если транспортное средство C не остановлено), выбирает верхний предел запроса на рекуперацию в качестве значения, большего нуля.
Как проиллюстрировано на фиг. 13, угол наклона линии, представленной посредством верхнего предела запроса на рекуперацию, равен или меньше угла наклона линии, представленной посредством предельного усиления системы управления, даже если скорость транспортного средства меньше пороговой скорости транспортного средства, скорости транспортного средства для переключения и предельной скорости транспортного средства для рекуперации.
Из вышеозначенного, когда рабочая величина нажатия педали AP акселератора меньше порогового значения, и педаль BP тормоза нажимается, модуль 64 управления координацией рекуперативной тормозной силы выбирает большее запрашиваемое значение из запрашиваемых значений, вычисленных посредством модуля 52 вычисления первой запрашиваемой тормозной силы и модуля 60 вычисления второй запрашиваемой тормозной силы. Другими словами, когда рабочая величина нажатия педали AP акселератора меньше порогового значения, и педаль BP тормоза нажимается, модуль 64 управления координацией рекуперативной тормозной силы выбирает бóльшую рекуперативную тормозную силу из первой рекуперативной тормозной силы и второй рекуперативной тормозной силы. Следует отметить, что в первом варианте осуществления, в качестве одного примера, описывается случай, в котором когда рабочая величина нажатия педали AP акселератора меньше порогового значения до тех пор, пока транспортное средство C не будет остановлено, генерируется рекуперативная тормозная сила, и скорость транспортного средства уменьшается.
Модуль 66 вычисления фрикционной тормозной силы принимает, из модуля 62 суммирования запрашиваемых тормозных сил, сигнал суммированной тормозной силы и принимает, из модуля 54 управления рекуперативной тормозной силой, сигнал рекуперативного крутящего момента. Модуль 66 вычисления фрикционной тормозной силы вычитает, из запрашиваемой тормозной силы после суммирования, включенной в сигнал суммированной тормозной силы, результирующую фактическую величину рекуперативной тормозной силы, включенную в сигнал рекуперативного крутящего момента, и вычисляет результирующую фактическую величину фрикционной тормозной силы.
Результирующая фактическая величина фрикционной тормозной силы представляет собой фрикционную тормозную силу, которая фактически генерируется в колесе W.
Модуль 66 вычисления фрикционной тормозной силы, который вычисляет результирующую фактическую величину фрикционной тормозной силы, вычисляет значение команды управления фрикционной тормозной силой.
Значение команды управления фрикционной тормозной силой является целевым значением давления жидкости, сгенерированного в главном цилиндре 18, для генерирования фрикционной тормозной силы в зависимости от результирующей фактической величины фрикционной тормозной силы.
Модуль 66 вычисления фрикционной тормозной силы, который вычисляет значение команды управления фрикционной тормозной силой, выводит информационный сигнал, включающий в себя вычисленное значение команды управления фрикционной тормозной силой (в дальнейшем иногда называемый "сигналом фрикционной тормозной силы"), в модуль 68 управления тормозным гидравлическим давлением.
Модуль 68 управления тормозным гидравлическим давлением выводит значение команды управления фрикционной тормозной силой в главный цилиндр 18.
Главный цилиндр 18 представляет собой устройство для подачи, в колесный тормозной цилиндр WS, тормозной жидкости.
Главный цилиндр 18, который принимает значение команды управления фрикционной тормозной силой, приводит в действие тормозной электромотор (не проиллюстрирован) и т.п., встроенный, например, в главный цилиндр 18, с тем чтобы приводить в действие поршень в главном цилиндре 18. Соответственно, в главном цилиндре 18, генерируется давление жидкости в зависимости от значения команды управления фрикционной тормозной силой. Затем тормозная жидкость давления жидкости в зависимости от значения команды управления фрикционной тормозной силой подается в колесный тормозной цилиндр WS. Следует отметить, что ниже описываются подробные конфигурации колесного тормозного цилиндра WS.
Как описано выше, модуль 6 управления фрикционной тормозной силой, в главном цилиндре 18 и колесном тормозном цилиндре WS, генерирует фрикционную тормозную силу на колесо W транспортного средства C.
Модуль 6 управления фрикционной тормозной силой генерирует, в главном цилиндре 18 и колесном тормозном цилиндре WS, фрикционную тормозную силу в зависимости от отклонения между запрашиваемыми значениями, суммированными посредством модуля 62 суммирования запрашиваемых тормозных сил, и рекуперативной тормозной силой, сгенерированной в приводном электромоторе DM посредством модуля 54 управления рекуперативной тормозной силой.
Следует отметить, что в состоянии, в котором принимается, например, информационный сигнал, указывающий то, что водитель нажимает педаль BP тормоза, если принимается информационный сигнал, указывающий то, что водитель нажимает AP педаль акселератора, устройство 1 управления тормозной/движущей силой проводит, например, процессы вычисления посредством такого допущения, что целевой движущий момент равен нулю.
Конфигурация транспортного средства C
Со ссылкой на фиг. 1-13, описываются конфигурации транспортного средства C, имеющего устройство 1 управления тормозной/движущей силой.
Как проиллюстрировано на фиг. 2, транспортное средство C, имеющее устройство 1 управления тормозной/движущей силой, включает в себя педаль AP акселератора, датчик APS акселератора, педаль BP тормоза, датчик BPS тормоза, датчик 16 скорости вращения колес и датчик MS частоты вращения электромотора. Дополнительно, транспортное средство C включает в себя модуль 2 ITS-управления, модуль 4 управления электромотором и модуль 6 управления фрикционной тормозной силой. Дополнительно, транспортное средство C включает в себя главный цилиндр 18, колесный тормозной цилиндр WS, аккумулятор BAT, инвертор INV, приводной электромотор DM, трансмиссию TR и колесо W (правое переднее колесо WFR, левое переднее колесо WFL, правое заднее колесо WRR и левое заднее колесо WRL).
Педаль AP акселератора представляет собой педаль, нажимаемую водителем транспортного средства C в ответ на запрос на тормозную силу или запрос на движущую силу.
Датчик APS акселератора представляет собой датчик, который определяет рабочую величину нажатия педали AP акселератора (рабочую величину нажатия педали) водителем.
Датчик APS акселератора выводит информационный сигнал, включающий в себя рабочую величину нажатия педали AP акселератора водителем, в модуль 4 управления электромотором.
Следует отметить, что датчик APS акселератора формируется с использованием, например, датчика хода педали. Дополнительно, конфигурация датчика APS акселератора не ограничена конфигурацией генерирования с использованием датчика хода педали, и может представлять собой конфигурацию, в которой определяется степень открытия педали AP акселератора посредством операции нажатия педали водителем.
Другими словами, датчик APS акселератора представляет собой датчик, который определяет рабочую величину нажатия педали AP акселератора водителем.
Педаль BP тормоза представляет собой педаль, нажимаемую водителем транспортного средства C в ответ на запрос на тормозную силу, и предоставляется отдельно от педали AP акселератора.
Датчик BPS тормоза представляет собой датчик, который определяет рабочую величину (рабочую величину нажатия) нажатия педали BP тормоза водителем.
Датчик BPS тормоза выводит информационный сигнал, включающий в себя рабочую величину нажатия педали BP тормоза водителем, в модуль 6 управления фрикционной тормозной силой.
Следует отметить, что датчик BPS тормоза формируется с использованием, например, датчика хода педали. Конфигурация датчика BPS тормоза не ограничена конфигурацией генерирования с использованием датчика хода педали, и может представлять собой конфигурацию, в которой, например, определяется степень открытия педали BP тормоза посредством операции нажатия педали водителем.
Другими словами, датчик BPS тормоза представляет собой датчик, который определяет рабочую величину нажатия педали BP тормоза водителем.
Датчик 16 скорости вращения колес предоставляется на каждом из колес W соответствующим способом.
Датчик 16 скорости вращения колес, для одного оборота соответствующего колеса W, формирует предварительно определенное число импульсов скорости вращения колес. Датчик 16 скорости вращения колес выводит информационный сигнал, включающий в себя сгенерированный импульс скорости вращения колес (в дальнейшем иногда называемый "импульсным сигналом скорости вращения колес"), в модуль 14 вычисления скорости транспортного средства.
Следует отметить, что на фиг. 2, датчик 16 скорости вращения колес, который формирует импульс скорости вращения колес для одного оборота правого переднего колеса WFR, представляется как датчик 16FR скорости вращения колес, и датчик 16 скорости вращения колес, который формирует импульс скорости вращения колес для одного оборота левого переднего колеса WFL, представляется как датчик 16FL скорости вращения колес. Аналогично, на фиг. 2, датчик 16 скорости вращения колес, который формирует импульс скорости вращения колес для одного оборота правого заднего колеса WRR, представляется как датчик 16RR скорости вращения колес, и датчик 16 скорости вращения колес, который формирует импульс скорости вращения колес для одного оборота левого заднего колеса WRL, представляется как датчик 16RL скорости вращения колес. Также в нижеприведенном описании, каждое из колес W и каждый из датчиков 16 скорости вращения колес могут представляться так, как указано выше.
Датчик MS частоты вращения электромотора определяет частоту вращения (состояние вращения) выходного вала для передачи движущей силы электромотора на основе импульсного сигнала вращения выходного вала. Затем датчик MS частоты вращения электромотора выводит сигнал частоты вращения выходного вала, включающий в себя определенную частоту вращения, в модуль 4 управления электромотором.
Импульсный сигнал вращения выходного вала представляет собой импульсный сигнал, представляющий состояние вращения выходного вала для передачи движущей силы электромотора.
Описания модуля 2 ITS-управления, модуля 4 управления электромотором, модуля 6 управления фрикционной тормозной силой и главного цилиндра 18 опускаются, поскольку описания этих элементов уже приведены.
Колесный тормозной цилиндр WS генерирует прижимающую силу для прижатия тормозной колодки (не проиллюстрирована), включенной в дисковый тормоз, к дисковому ротору (не проиллюстрирован). Дисковый ротор вращается вместе с каждым из колес W, контактирует с тормозной колодкой и генерирует фрикционное сопротивление.
Другими словами, главный цилиндр 18 и каждый из колесных тормозных цилиндров WS, соответственно, предоставляются на переднем колесе WF и заднем колесе Wr и формируют фрикционный тормоз, который генерирует фрикционную тормозную силу на каждом из колес W.
Соответственно, фрикционный тормоз транспортного средства C генерирует фрикционную тормозную силу на всех колесах W (правом переднем колесе WFR, левом переднем колесе WFL, правом заднем колесе WRR и левом заднем колесе WRL).
Следует отметить, что на фиг. 2, колесный тормозной цилиндр WS, размещенный для правого переднего колеса WFR, представляется как колесный тормозной цилиндр WSFR, и колесный тормозной цилиндр WS, размещенный для левого переднего колеса WFL, представляется как колесный тормозной цилиндр WSFL. Аналогично, на фиг. 2, колесный тормозной цилиндр WS, размещенный для правого заднего колеса WRR, представляется как колесный тормозной цилиндр WSRR, и колесный тормозной цилиндр WS, размещенный для левого заднего колеса WRL, представляется как колесный тормозной цилиндр WSRL. Также в нижеприведенном описании, каждый из колесных тормозных цилиндров WS может представляться так, как указано выше.
Аккумулятор BAT формируется с использованием, например, литий-ионного аккумулятора.
В аккумуляторе BAT, предоставляется контроллер аккумулятора (не проиллюстрирован), который может определять значение тока, значение напряжения, температуру и т.п. аккумулятора BAT. Контроллер аккумулятора определяет SOC аккумулятора BAT и выводит информационный сигнал, включающий в себя определенное SOC, в модуль 54 управления рекуперативной тормозной силой.
В аккумуляторе BAT, мощность, вырабатываемая посредством приводного электромотора DM через рекуперативное торможение, заряжается через инвертор INV.
Когда инвертор INV принимает, из модуля 50 управления движущей силой, значение команды управления током приведения в движение, инвертор INV выводит значение команды управления током приведения в движение, включенное в сигнал движущего момента, в приводной электромотор DM. Когда инвертор INV принимает, из модуля 54 управления рекуперативной тормозной силой, сигнал рекуперативного момента, инвертор INV выводит значение команды управления рекуперативным током, включенное в сигнал рекуперативного момента, в приводной электромотор DM.
Когда приводной электромотор DM принимает, из инвертора INV, значение команды управления током приведения в движение, приводной электромотор DM генерирует движущую силу в зависимости от значения команды управления током приведения в движение.
Движущая сила, сгенерированная посредством приводного электромотора DM, предоставляется, через ведущий вал (не проиллюстрирован) и т.п., на каждое из колес W.
Когда приводной электромотор DM принимает, из инвертора INV, значение команды управления рекуперативным током, приводной электромотор DM генерирует рекуперативную тормозную силу в зависимости от значения команды управления током приведения в движение.
Рекуперативная тормозная сила, сгенерированная посредством приводного электромотора DM, предоставляется на каждое из колес W через ведущий вал и т.п.
Следует отметить, что в первом варианте осуществления, в качестве одного примера, описывается конфигурация, в которой приводной электромотор DM генерирует движущую силу или рекуперативную тормозную силу только на правое переднее колесо WFR и левое переднее колесо WFL, т.е. только на переднее колесо WF.
Соответственно, транспортное средство C первого варианта осуществления представляет собой транспортное средство (EV: электротранспортное средство), в котором источник приведения в движение, который генерирует движущую силу, представляет собой электромотор. Дополнительно, транспортное средство C в первом варианте осуществления представляет собой транспортное средство (транспортное 2WD-средство), в котором приводная система представляет собой привод на два колеса. В транспортном средстве C первого варианта осуществления, правое переднее колесо WFR и левое переднее колесо WFL представляют собой ведущие колеса.
Трансмиссия TR, на основе рабочего состояния рычага переключения передач (переключателя коробки передач) водителем, переключает диапазоны движения (например, диапазон "P: парковки", диапазон "D: приведения в движение", диапазон "R: заднего хода" и т.п.). Соответственно, направление вращения и состояние вращения колес W переключаются.
На колесо W, из приводного электромотора DM, предоставляется движущая сила или рекуперативной тормозной силы.
Дополнительно, на колесо W, фрикционная тормозная сила предоставляется через колесный тормозной цилиндр WS.
Процессы, проводимые посредством модуля 4 управления электромотором, и процессы, проводимые посредством модуля 6 управления фрикционной тормозной силой
Со ссылкой на фиг. 1-13, с использованием фиг. 14A и фиг. 14B и фиг. 15, описывается один пример процесса, проводимого посредством модуля 4 управления электромотором, и один пример процесса, проводимого посредством модуля 6 управления фрикционной тормозной силой. Следует отметить, что в нижеприведенном описании, процессы, проводимые посредством модуля 4 управления электромотором и модуля 6 управления фрикционной тормозной силой, упоминаются как "процесс управления тормозной/движущей силой".
Как проиллюстрировано на фиг. 14A и фиг. 14B, после того, как процесс управления тормозной/движущей силой начинается (начало), проводится процесс этапа S100.
На этапе S100, рабочее состояние переключателя 12 выбора режима обнаруживается. Соответственно, на этапе S100, определяется то, выбирается или нет "однопедальный режим" в качестве режима управления транспортного средства C ("однопедальный режим" на чертеже).
Когда, на этапе S100, определяется то, что "однопедальный режим" выбирается ("Да" на чертеже) в качестве режима управления транспортного средства C, процесс управления тормозной/движущей силой переходит к этапу S102.
С другой стороны, когда, на этапе S100, определяется то, что "двухпедальный режим" выбирается ("Нет" на чертеже) в качестве режима управления транспортного средства C, процесс управления тормозной/движущей силой переходит к этапу S148.
На этапе S102, датчик MS частоты вращения электромотора определяет частоту вращения выходного вала для передачи движущей силы электромотора для приводного электромотора DM. Соответственно, на этапе S102, частота вращения приводного электромотора DM определяется ("определение частоты вращения электромотора" на чертеже). После того, как частота вращения приводного электромотора DM определяется на этапе S102, процесс управления тормозной/движущей силой к этапу S104.
На этапе S104, модуль 42 определения уклона определяет движущий момент, сгенерированный в приводном электромоторе DM, на основе значения команды управления током приведения в движение, вычисленного посредством модуля 50 управления движущей силой ("определение крутящего момента электромотора" на чертеже). После того, как движущий момент, сгенерированный в приводном электромоторе DM, определяется на этапе S104, процесс управления тормозной/движущей силой переходит к этапу S106.
На этапе S106, модуль 42 определения уклона определяет направление уклона на основе частоты вращения приводного электромотора DM, определенной на этапе S102, и движущего момента, определенного на этапе S104, и определяет величину уклона. На этапе S106, модуль 44a вычисления уравновешивающего момента вычисляет уравновешивающий момент на основе направления уклона, определенного посредством модуля 42 определения уклона, и величины уклона, определенной посредством модуля 42 определения уклона ("вычисление уравновешивающего момента" на чертеже). После того, как уравновешивающий момент вычисляется на этапе S106, процесс управления тормозной/движущей силой переходит к этапу S108.
На этапе S108, каждый из датчиков 16 скорости вращения колес обнаруживает состояние вращения соответствующего колеса W в качестве импульса скорости вращения колес. Соответственно, на этапе S108, частота оборотов каждого из колес W определяется ("определение скорости вращения колес" на чертеже). После того, как частота оборотов каждого из колес W определяется на этапе S108, процесс управления тормозной/движущей силой переходит к этапу S110.
На этапе S110, модуль 44b вычисления вспомогательного коэффициента усиления вычисляет вспомогательный коэффициент усиления с использованием скорости транспортного средства, определенной на этапе S108 ("вычисление вспомогательного коэффициента усиления" на чертеже). После того, как вспомогательный коэффициент усиления вычисляется на этапе S110, процесс управления тормозной/движущей силой переходит к этапу S112.
На этапе S112, модуль 44c коррекции на основе уклона умножает уравновешивающий момент, вычисленный на этапе S108, на вспомогательный коэффициент усиления, вычисленный на этапе S110. Соответственно, на этапе S112, параметр для коррекции тормозной силы или движущей силы на основе направления и величины уклона вычисляется ("вычисление величины коррекции на основе уклона" на чертеже). После того, как уравновешивающий момент умножается на вспомогательный коэффициент усиления на этапе S112, процесс управления тормозной/движущей силой переходит к этапу S114.
На этапе S114, аналогично этапу S108, частота оборотов каждого из колес W определяется ("определение скорости вращения колес" на чертеже). После того, как частота оборотов каждого из колес W определяется на этапе S114, процесс управления тормозной/движущей силой переходит к этапу S116.
На этапе S116, датчик APS акселератора определяет рабочую величину нажатия педали AP акселератора водителем. Соответственно, на этапе S116, степень открытия педали AP акселератора определяется ("определение степени открытия педали" на чертеже). После того, как степень открытия педали AP акселератора определяется на этапе S116, процесс управления тормозной/движущей силой переходит к этапу S118.
На этапе S118, модуль 40 вычисления базовой тормозной/движущей силы вычисляет целевой движущий момент или целевой тормозной момент на основе скорости транспортного средства в зависимости от частоты оборотов, определенной на этапе S114, и степени открытия педали AP акселератора, определенной на этапе S116. Другими словами, на этапе S118, движущий момент или тормозной момент в зависимости от карты тормозной/движущей силы, проиллюстрированной на фиг. 5, вычисляется ("вычисление базового тормозного/движущего момента" на чертеже). После того, как движущий момент или тормозной момент в зависимости от карты тормозной/движущей силы вычисляется на этапе S118, процесс управления тормозной/движущей силой переходит к этапу S120.
На этапе S120, модуль 46 управления арбитрированием определяет тормозную силу или движущую силу, выбранную посредством модуля 24 задания ITS-вывода ("определение тормозной/движущей силы согласно ITS" на чертеже). После того, как движущая сила или тормозная сила, выбранная посредством модуля 24 задания ITS-вывода, определяется на этапе S120, процесс управления тормозной/движущей силой переходит к этапу S122.
На этапе S122, модуль 44c коррекции на основе уклона корректирует движущий момент или тормозной момент, вычисленный на этапе S118, с использованием параметра, вычисленного на этапе S112 (параметра, полученного посредством умножения уравновешивающего момента на вспомогательный коэффициент усиления). Другими словами, на этапе S122, модуль 44c коррекции на основе уклона вычисляет скорректированную тормозную силу или скорректированную движущую силу ("вычисление тормозной/движущей силы после коррекции на основе уклона" на чертеже). После того, как скорректированная тормозная сила или скорректированная движущая сила вычисляется на этапе S122, процесс управления тормозной/движущей силой переходит к этапу S124.
Следует отметить, что ниже описываются подробности процесса, проводимого на этапе S122.
На этапе S124, модуль 46 управления арбитрированием сравнивает сигнал ITS-вывода с сигналом скорректированной движущей силы и выбирает большую силу из движущей силы или тормозной силы (выбор высокого уровня) ("арбитрирование тормозной/движущей силы" на чертеже). Когда большее значение выбирается из движущей силы или тормозной силы, включенной в сигнал ITS-вывода и сигнал скорректированной движущей силы, на этапе S124, процесс управления тормозной/движущей силой переходит к этапу S126.
На этапе S126, выполняется определение в отношении того, выбирает или нет модуль 46 управления арбитрированием тормозную силу на этапе S124 ("Dr-запрос представляет собой торможение" на чертеже).
На этапе S126, когда определяется то, что модуль 46 управления арбитрированием выбирает тормозную силу на этапе S124 ("Да" на чертеже), процесс управления тормозной/движущей силой переходит к этапу S128.
С другой стороны, на этапе S126, когда определяется то, что модуль 46 управления арбитрированием выбирает движущую силу на этапе S124 ("Нет" на чертеже), процесс управления тормозной/движущей силой переходит к этапу S144.
На этапе S128, модуль 52 вычисления первой запрашиваемой тормозной силы вычисляет первую рекуперативную тормозную силу в зависимости от рабочей величины нажатия педали AP акселератора и скорости транспортного средства. На этапе S128, сигнал первого запроса на торможение, включающий в себя вычисленную первую рекуперативную тормозную силу, выводится в модуль 6 управления фрикционной тормозной силой ("вывод первой рекуперативной тормозной силы" на чертеже). После того, как сигнал первого запроса на торможение выводится на этапе S128, процесс управления тормозной/движущей силой переходит к этапу S130.
Следует отметить, что первая рекуперативная тормозная сила, вычисленная на этапе S128, вычисляется так таким образом, что, например, как проиллюстрировано на фиг. 6, когда скорость транспортного средства равна или меньше первой пороговой скорости транспортного средства, скорость транспортного средства, а также первая рекуперативная тормозная сила уменьшаются, а когда скорость транспортного средства становится равной 0, первая рекуперативная тормозная сила также становится равной 0.
Другими словами, на этапе S128, когда скорость транспортного средства равна или меньше первой пороговой скорости транспортного средства, первая рекуперативная тормозная сила вычисляется таким образом, чтобы плавно останавливать транспортное средство C (плавная остановка: SS).
На этапе S130, датчик BPS тормоза определяет рабочую величину нажатия педали BP тормоза водителем. Соответственно, на этапе S130, рабочая величина нажатия педали BP тормоза определяется ("определение рабочей величины нажатия педали тормоза" на чертеже). После того, как рабочая величина нажатия педали BP тормоза определяется на этапе S130, процесс управления тормозной/движущей силой переходит к этапу S132.
На этапе S132, модуль 60 вычисления второй запрашиваемой тормозной силы вычисляет второй запрос на торможение в качестве запроса тормозной силы в зависимости от рабочей величины нажатия педали BP тормоза водителем и скорости транспортного средства ("вычисление тормозной силы согласно запросу водителя" на чертеже). После того, как второй запрос на торможение вычисляется на этапе S132, процесс управления тормозной/движущей силой переходит к этапу S134.
На этапе S134, модуль 62 суммирования запрашиваемых тормозных сил суммирует первую рекуперативную тормозную силу, вычисленную на этапе S128, и второй запрос на торможение, вычисленный на этапе S132 ("суммирование всех запросов на торможение" на чертеже). После того, как первая рекуперативная тормозная сила и второй запрос на торможение суммируются на этапе S134, процесс управления тормозной/движущей силой переходит к этапу S136.
На этапе S136, модуль 64 управления координацией рекуперативной тормозной силы сравнивает первую рекуперативную тормозную силу, включенную в сигнал первой рекуперативной тормозной силы, принимаемый из модуля 62 суммирования запрашиваемых тормозных сил, со второй рекуперативной тормозной силой, включенной в сигнал второй рекуперативной тормозной силы. Дополнительно, на этапе S136, модуль 64 управления координацией рекуперативной тормозной силы выбирает большую рекуперативную тормозную силу (выбор высокого уровня) и задает выбранную рекуперативную тормозную силу в качестве запрашиваемого значения рекуперативной тормозной силы. Соответственно, на этапе S136, модуль 64 управления координацией рекуперативной тормозной силы вычисляет запрашиваемое значение рекуперативной тормозной силы ("вычисление значения запроса на рекуперацию" на чертеже). После того, как запрашиваемое значение рекуперативной тормозной силы вычисляется на этапе S136, процесс управления тормозной/движущей силой переходит к этапу S138.
На этапе S138, модуль 64 управления координацией рекуперативной тормозной силы выводит сигнал значения запроса на рекуперацию, включающий в себя запрашиваемое значение рекуперативной тормозной силы, в модуль 54 управления рекуперативной тормозной силой ("вывод запроса на рекуперацию" на чертеже). После того, как сигнал значения запроса на рекуперацию выводится в модуль 54 управления рекуперативной тормозной силой на этапе S138, процесс управления тормозной/движущей силой переходит к этапу S140.
На этапе S140, модуль 54 управления рекуперативной тормозной силой вычисляет значение команды управления рекуперативным током. Дополнительно, сигнал рекуперативного момента, включающий в себя значение команды управления рекуперативным током, выводится в инвертор INV. Соответственно, на этапе S140, приводной электромотор DM генерирует рекуперативную тормозную силу в зависимости от значения команды управления рекуперативным током ("вывод значения для выполнения рекуперации электромотора" на чертеже).
Другими словами, на этапе S140, модуль 54 управления рекуперативной тормозной силой инструктирует приводному электромотору DM генерировать бóльшую рекуперативную тормозную силу из первой рекуперативной тормозной силы и второй рекуперативной тормозной силы, когда рабочая величина нажатия педали AP акселератора меньше порогового значения, и педаль BP тормоза нажимается.
После того, как рекуперативная тормозная сила в зависимости от значения команды управления рекуперативным током генерируется на этапе S140, процесс управления тормозной/движущей силой переходит к этапу S142.
На этапе S142, модуль 66 вычисления фрикционной тормозной силы вычисляет значение команды управления фрикционной тормозной силой, и модуль 68 управления тормозным гидравлическим давлением выводит значение команды управления фрикционной тормозной силой в главный цилиндр 18. Соответственно, на этапе S142, фрикционная тормозная сила в зависимости от значения команды управления фрикционной тормозной силой генерируется ("выполнение фрикционного торможения" на чертеже). После того, как фрикционная тормозная сила в зависимости от значения команды управления фрикционной тормозной силой генерируется на этапе S142, процесс управления тормозной/движущей силой завершается (конец).
На этапе S144, модуль 48 распределения тормозной/движущей силы выводит, в модуль 50 управления движущей силой, сигнал распределения движущей силы ("вывод запроса на приведение в движение" на чертеже). После того, как сигнал распределения движущей силы выводится в модуль 50 управления движущей силой на этапе S144, процесс управления тормозной/движущей силой переходит к этапу S146.
На этапе S146, модуль 50 управления движущей силой вычисляет значение команды управления током приведения в движение и выводит вычисленный сигнал движущего момента в инвертор INV. Соответственно, на этапе S146, приводной электромотор DM генерирует движущую силу в зависимости от значения команды управления током приведения в движение ("выполнение управления приведением в движение" на чертеже). После того, как движущая сила в зависимости от значения команды управления током приведения в движение генерируется на этапе S146, процесс управления тормозной/движущей силой завершается (конец).
На этапе S148, тормозная сила и движущая сила транспортного средства C управляются на основе "двухпедального режима" ("выполнение управления тормозной/движущей силой для двухпедального режима" на чертеже). Следует отметить, что, поскольку управление тормозной силой и движущей силой на основе "двухпедального режима" представляет собой известную технологию, его описание опускается. После того, как тормозная сила и движущая сила транспортного средства C управляются на основе "двухпедального режима" на этапе S148, процесс управления тормозной/движущей силой завершается (конец).
Далее, со ссылкой на фиг. 15, описываются подробности процесса, проводимого при вышеописанном этапе S122 (в дальнейшем иногда называемого "процессом коррекции тормозной/движущей силы").
Как проиллюстрировано на фиг. 15, после того, как процесс коррекции тормозной/движущей силы начинается (начало), процесс этапа S200 проводится.
На этапе S200, посредством обращения к сигналу определения согласно ITS, выводимому из модуля 26 вывода состояния ITS-управления, состояние управления посредством модуля 2 ITS-управления обнаруживается ("обнаружение состояния ITS-управления" на чертеже). Другими словами, на этапе S200, обнаруживается то, управляет или нет модуль 2 ITS-управления тормозной силой и движущей силой отдельно от запроса на тормозную силу или запроса на движущую силу водителем транспортного средства C. После того, как состояние управления посредством модуля 2 ITS-управления обнаруживается на этапе S200, процесс коррекции тормозной/движущей силы переходит к этапу S202.
На этапе S202, определяется то, устанавливается или нет перехват управления водителем ("Dr-перехват управления устанавливается" на чертеже).
Когда определяется то, что перехват управления водителем не устанавливается, на этапе S202 ("Нет" на чертеже), процесс коррекции тормозной/движущей силы переходит к этапу S204.
С другой стороны, когда определяется то, что перехват управления водителем устанавливается на этапе S202 ("Да" на чертеже), процесс коррекции тормозной/движущей силы переходит к этапу S208.
На этапе S204, определяется то, представляет или нет состояние управления, обнаруженное на этапе S200, собой состояние, в котором выполняется управление посредством модуля 2 ITS-управления ("состояние ITS-управления" на чертеже).
На этапе S204, когда определяется то, что состояние управления, обнаруженное на этапе S200, представляет собой состояние, в котором выполняется управление посредством модуля 2 ITS-управления ("Да" на чертеже), процесс коррекции тормозной/движущей силы переходит к этапу S206.
С другой стороны, когда определяется то, что состояние управления, обнаруженное на этапе S200, не представляет собой состояние, в котором выполняется управление посредством модуля 2 ITS-управления на этапе S204 ("Нет" на чертеже), процесс коррекции тормозной/движущей силы переходит к этапу S208.
На этапе S206, модуль 56 ограничения коррекции ограничивает скорректированную тормозную силу или скорректированную движущую силу с использованием значения, полученного посредством умножения предельного значения коррекции на основе уклона на верхнее предельное значение и нижнее предельное значение ("первый ограничительный процесс" на чертеже). После того, как скорректированная тормозная сила или скорректированная движущая сила ограничивается с использованием значения, полученного посредством умножения предельного значения коррекции на основе уклона на верхнее предельное значение и нижнее предельное значение на этапе S206, процесс коррекции тормозной/движущей силы переходит к этапу S210.
На этапе S208, модуль 56 ограничения коррекции ограничивает скорректированную тормозную силу или скорректированную движущую силу с использованием верхнего предельного значения и нижнего предельного значения ("второй ограничительный процесс" на чертеже). После того, как скорректированная тормозная сила или скорректированная движущая сила ограничивается с использованием верхнего предельного значения и нижнего предельного значения на этапе S208, процесс коррекции тормозной/движущей силы переходит к этапу S210.
На этапе S210, модуль 56 ограничения коррекции выводит информационный сигнал, включающий в себя ограниченную тормозную силу или ограниченную движущую силу, в модуль 46 управления арбитрированием. Другими словами, на этапе S210, значение, полученное посредством ограничения скорректированной тормозной силы или скорректированной движущей силы, выводится в модуль 46 управления арбитрированием ("вывод предельного значения" на чертеже). После того, как значение, полученное посредством ограничения скорректированной тормозной силы или скорректированной движущей силы, выводится в модуль 46 управления арбитрированием на этапе S210, процесс коррекции тормозной/движущей силы завершается (конец).
Как описано выше, в процессе коррекции тормозной/движущей силы, величина коррекции для коррекции базовой тормозной силы и базовой движущей силы в зависимости от направления уклона поверхности дороги и величины уклона задается меньшей, когда управление автоматическим движением проводится, по сравнению с тем, когда управление автоматическим движением не проводится.
Работа
Со ссылкой на фиг. 1-15, с использованием фиг. 16A и 16B, описывается один пример операций, проводимых с использованием устройства 1 управления тормозной/движущей силой согласно первому варианту осуществления. Следует отметить, что фиг. 16A иллюстрирует временную диаграмму операций, проводимых с использованием конфигурации с применением устройства 1 управления тормозной/движущей силой согласно первому варианту осуществления. Фиг. 16B иллюстрирует временную диаграмму операций, проводимых с использованием конфигурации без применения устройства 1 управления тормозной/движущей силой согласно первому варианту осуществления.
Фиг. 16A и 16B иллюстрируют то, что состояние движения транспортного средства C переходит из состояния, в котором транспортное средство C движется по ровной поверхности дороги (ровной дороге), в состояние, в котором транспортное средство C движется по поверхности дороги, имеющей уклон с подъемом (в гору). Фиг. 16A и 16B иллюстрируют то, что управление (управление движением на постоянной скорости) посредством модуля 2 ITS-управления выполняется таким образом, что транспортное средство C движется на заданной скорости.
Когда временные диаграммы, проиллюстрированные на фиг. 16A и 16B, начинаются, в состоянии, в котором водитель не нажимает педаль акселератора AP, движущая сила для обеспечения движения транспортного средства C по ровной дороге на заданной скорости генерируется в транспортном средстве C.
В отношении движущей силы, сгенерированной в транспортном средстве C, движущая сила в зависимости от рабочей величины нажатия педали AP акселератора водителем сравнивается с движущей силой, вычисленной посредством модуля 20 вычисления движущей силы на постоянной скорости. Затем большая движущая сила выбирается (выбор высокого уровня), чтобы задавать движущую силу, сгенерированную в транспортном средстве C.
Следует отметить, что на фиг. 16A и 16B, тормозная/движущая сила в зависимости от рабочей величины нажатия педали AP акселератора водителем представляется как "тормозная/движущая сила согласно запросу водителя". Аналогично, на фиг. 16A и 16B, тормозная/движущая сила, вычисленная посредством модуля 2 ITS-управления (на фиг. 16A и 16B, только движущая сила, вычисленная посредством модуля 20 вычисления движущей силы на постоянной скорости), представляется как "тормозная/движущая сила согласно ITS". Дополнительно, на фиг. 18A и 18B, рабочая величина (степень открытия) педали AP акселератора обозначается с помощью ссылки с номером "APO".
Соответственно, как проиллюстрировано на фиг. 16A и 16B, в состоянии, в котором водитель не нажимает педаль акселератора AP, движущая сила, вычисленная посредством модуля 20 вычисления движущей силы на постоянной скорости, задается в качестве движущей силы, сгенерированной в транспортном средстве C.
В состоянии, в котором движущая сила, вычисленная посредством модуля 20 вычисления движущей силы на постоянной скорости, генерируется в транспортном средстве C, и транспортное средство движется по ровной дороге от момента t1 времени, когда водитель начинает управление педалью AP акселератора, по мере того, как "APO" увеличивается, тормозная сила в зависимости от "APO" уменьшается.
От момента t2 времени, когда водитель поддерживает "APO" равным постоянному значению, когда транспортное средство C движется по ровной дороге, тормозная/движущая сила в зависимости от "APO" поддерживается равным постоянному значению.
В состоянии, в котором "APO" поддерживается равным постоянному значению в момент t2 времени, когда состояние движения транспортного средства C переходит из состояния, в котором транспортное средство движется по ровной дороге, в состояние, в котором транспортное средство движется на подъеме, в момент t3 времени, когда выполняется переход состояния движения транспортного средства C, скорость транспортного средства уменьшается.
В момент t3 времени, модуль 44c коррекции на основе уклона вычисляет скорректированную движущую силу в зависимости от уклона подъема. Вычисленная скорректированная движущая сила суммируется с "тормозной/движущей силой согласно запросу водителя". Следует отметить, что на фиг. 16A и 16B, тормозная/движущая сила, полученная посредством суммирования скорректированной движущей силы, вычисленной посредством модуля 44c коррекции на основе уклона, с "тормозной/движущей силой согласно запросу водителя", представляется как "тормозная/движущая сила после коррекции на основе уклона".
Другими словами, в момент t3 времени, тормозная/движущая сила в зависимости от "APO" и скорости транспортного средства на карте тормозной/движущей силы, проиллюстрированной на фиг. 5, корректируется на основе уклона подъема. Следовательно, от момента t3 времени, "тормозная/движущая сила согласно запросу водителя" представляет собой движущую силу, которая увеличивается на основе уклона подъема.
Следует отметить, что фиг. 16A и 16B иллюстрируют состояние, в котором до момента t3 времени, рабочая величина нажатия педали AP акселератора водителем равна или меньше рабочей величины переключения тормозной/движущей силы. Другими словами, "тормозная/движущая сила согласно запросу водителя" представляет собой тормозную силу только от начала временных диаграмм, проиллюстрированных на фиг. 16A и 16B, до момента t3 времени.
Когда в момент t3 времени, скорость транспортного средства уменьшается, скорость транспортного средства становится меньше заданной скорости. Таким образом, модуль 20 вычисления движущей силы на постоянной скорости вычисляет движущую силу, которая увеличивается согласно уменьшению скорости транспортного средства. Тем не менее, вычисление движущей силы посредством модуля 20 вычисления движущей силы на постоянной скорости требует большего числа процессов, чем процессы для вычисления скорректированной движущей силы посредством модуля 44c коррекции на основе уклона. Это обусловлено тем, что тогда как вычисление посредством модуля 44c коррекции на основе уклона выполняется с использованием модуля 4 управления электромотором и модуля 6 управления фрикционной тормозной силой, вычисление посредством модуля 20 вычисления движущей силы на постоянной скорости выполняется с использованием модуля 2 ITS-управления, модуля 4 управления электромотором, модуля 6 управления фрикционной тормозной силой, модуля 14 вычисления скорости транспортного средства и датчика 16 скорости вращения колес.
Таким образом, как проиллюстрировано на фиг. 16A и 16B, в момент t3 времени, когда состояние движения транспортного средства C переходит, проводится вычисление посредством модуля 44c коррекции на основе уклона. Затем вычисление посредством модуля 20 вычисления движущей силы на постоянной скорости проводится от момента t4 времени после истечения времени, необходимого для отражения изменения скорости транспортного средства посредством модуля 14 вычисления скорости транспортного средства от момента t3 времени.
Соответственно, как проиллюстрировано на фиг. 16A и 16B, в течение периода от момента t3 времени до момента t4 времени, движущая сила, представленная посредством "тормозной/движущей силы после коррекции на основе уклона", превышает движущую силу, представленную с помощью "тормозная/движущая сила согласно ITS". Другими словами, значение, полученное посредством суммирования скорректированной движущей силы, вычисленной посредством модуля 44c коррекции на основе уклона, с "тормозной/движущей силой согласно запросу водителя", становится больше движущей силы, вычисленной посредством модуля 20 вычисления движущей силы на постоянной скорости.
В устройстве 1 управления тормозной/движущей силой согласно первому варианту осуществления, определяется то, устанавливается или нет перехват управления водителем, и определяется то, проводит или нет модуль 2 ITS-управления управление. Если перехват управления водителем не устанавливается, и модуль 2 ITS-управления проводит управление, модуль 56 ограничения коррекции ограничивает скорректированную движущую силу с использованием значения, полученного посредством умножения предельного значения коррекции на основе уклона на верхнее предельное значение и нижнее предельное значение.
Соответственно, как проиллюстрировано на фиг. 16A и 16B, движущая сила, представленная посредством "тормозной/движущей силы после коррекции на основе уклона", равна или меньше движущей силы, представленной с помощью "тормозной/движущей силы согласно ITS".
Альтернативно, с использованием конфигурации без применения устройства 1 управления тормозной/движущей силой согласно первому варианту осуществления, движущая сила, сгенерированная в транспортном средстве C, задается посредством выбора высокого уровня между "тормозной/движущей силой после коррекции на основе уклона" и "тормозной/движущей силой согласно ITS" независимо от результата определения по установлению перехвата управления водителем и результата определения по управлению посредством модуля 2 ITS-управления.
Соответственно, как проиллюстрировано на фиг. 16B, когда движущая сила, представленная посредством "тормозной/движущей силы после коррекции на основе уклона", превышает движущую силу, представленную с помощью "тормозная/движущая сила согласно ITS", движущая сила, представленная посредством "тормозной/движущей силы после коррекции на основе уклона", генерируется в транспортном средстве C. Посредством движущей силы, представленной посредством "тормозной/движущей силы после коррекции на основе уклона", превышающей движущую силу, представленную с помощью "тормозной/движущей силы согласно ITS", даже если водитель не прекращает операцию нажатия педали AP акселератора (не убирает ногу водителя с акселератора), определяется то, что перехват управления водителем устанавливается.
Следовательно, например, когда состояние движения транспортного средства C переходит из состояния, в котором транспортное средство движется в подъем, в состояние, в котором транспортное средство движется по ровной дороге, тормозная/движущая сила, управляемая посредством модуля 2 ITS-управления, не генерируется, и тормозная/движущая сила, сгенерированная в транспортном средстве C, представляет собой тормозную/движущую силу в зависимости от "APO". Соответственно, как проиллюстрировано на фиг. 16A и 16B, в состоянии, в котором "тормозная/движущая сила согласно запросу водителя" представляет собой тормозную силу только тогда, когда транспортное средство C, которое движется в подъем, движется по ровной дороге, вычисление скорректированной движущей силы посредством модуля 44c коррекции на основе уклона прекращается, и замедление возникает в транспортном средстве C. Соответственно, с использованием конфигурации без применения устройства 1 управления тормозной/движущей силой согласно первому варианту осуществления, замедление, не намеченное водителем, возникает в транспортном средстве C.
С другой стороны, в устройстве 1 управления тормозной/движущей силой согласно первому варианту осуществления, когда перехват управления водителем не устанавливается, и модуль 2 ITS-управления проводит управление, как проиллюстрировано на фиг. 16A, "тормозная/движущая сила после коррекции на основе уклона" равна или меньше "тормозной/движущей силы согласно ITS". Если водитель продолжает операцию нажатия педали AP акселератора, определяется то, что перехват управления водителем не устанавливается. Соответственно, в или после момента t5 времени, когда модуль 20 вычисления движущей силы на постоянной скорости вычисляет движущую силу в зависимости от скорости транспортного средства, которая уменьшается в момент t3 времени, движущая сила, представленная с помощью "тормозной/движущей силы согласно ITS", поддерживается равной движущей силе в зависимости от заданной скорости.
Таким образом, например, когда состояние движения транспортного средства C переходит из состояния, в котором транспортное средство движется в подъем, в состояние, в котором транспортное средство движется по ровной дороге, тормозная/движущая сила, управляемая посредством модуля 2 ITS-управления, генерируется в транспортном средстве C. Соответственно, как проиллюстрировано на фиг. 16A и 16B, в состоянии, в котором "тормозная/движущая сила согласно запросу водителя" представляет собой тормозную силу только тогда, когда транспортное средство C, которое движется в подъем, движется по ровной дороге, транспортное средство C движется с помощью движущей силы, вычисленной посредством модуля 2 ITS-управления. Соответственно, в устройстве 1 управления тормозной/движущей силой согласно первому варианту осуществления, когда состояние, в котором рабочая величина нажатия педали AP акселератора водителем равна или меньше рабочей величины переключения тормозной/движущей силы, продолжается, даже если уклон поверхности дороги изменяется, можно обеспечивать движение транспортного средства C на заданной скорости.
Следует отметить, что вышеописанный датчик 16 скорости вращения колес и модуль 14 вычисления скорости транспортного средства соответствуют датчикам скорости транспортного средства, которые определяют скорость движения транспортного средства C.
Вышеописанный модуль 6 управления фрикционной тормозной силой и модуль 54 управления рекуперативной тормозной силой соответствуют модулям управления тормозной силой.
Дополнительно, вышеописанный модуль 6 управления фрикционной тормозной силой, модуль 54 управления рекуперативной тормозной силой и модуль 50 управления движущей силой соответствуют модулям управления тормозной/движущей силой.
Как описано выше, в способе управления тормозной/движущей силой с использованием устройства 1 управления тормозной/движущей силой согласно первому варианту осуществления, определяется величина уклона поверхности дороги, по которой движется транспортное средство C.
Когда величина уклона поверхности дороги увеличивается (увеличение в восходящем направлении), базовая тормозная сила корректируется таким образом, что она уменьшается, на основе величины уклона, или базовая движущая сила корректируется таким образом, что она увеличивается, на основе величины уклона. Дополнительно, скорректированная тормозная сила или движущая сила генерируется в транспортном средстве C.
С другой стороны, когда величина уклона поверхности дороги уменьшается (увеличение в направлении вниз), базовая тормозная сила корректируется таким образом, что она увеличивается, на основе величины уклона, или базовая движущая сила корректируется таким образом, что она уменьшается, на основе величины уклона. Дополнительно, скорректированная тормозная сила или движущая сила генерируется в транспортном средстве C.
Следует отметить, что вышеописанный первый вариант осуществления является одним примером настоящего изобретения, настоящее изобретение не ограничено вышеописанным первым вариантом осуществления, и даже в режиме, отличном от этого варианта осуществления, различные модификации могут вноситься в зависимости от конструкции и т.п. в пределах объема без отступления от технической идеи настоящего изобретения.
Преимущества первого варианта осуществления
Способ управления тормозной/движущей силой с использованием устройства 1 управления тормозной/движущей силой согласно первому варианту осуществления позволяют достигать следующего преимущества.
(1) Величина уклона поверхности дороги, по которой движется транспортное средство C, определяется.
Когда величина уклона поверхности дороги увеличивается, базовая тормозная сила корректируется таким образом, что она уменьшается, на основе величины уклона, или базовая движущая сила корректируется таким образом, что она увеличивается, на основе величины уклона. С другой стороны, когда величина уклона поверхности дороги уменьшается, базовая тормозная сила корректируется таким образом, что она увеличивается, на основе величины уклона, или базовая движущая сила корректируется таким образом, что она уменьшается, на основе величины уклона. Дополнительно, транспортное средство C управляется таким образом, что скорректированная тормозная сила или движущая сила генерируется в транспортном средстве C.
Таким образом, базовая тормозная сила или базовая движущая сила корректируется на основе того, увеличивается или уменьшается величина уклона поверхности дороги. Дополнительно, можно управлять транспортным средством C таким образом, что скорректированная тормозная сила или движущая сила генерируется в транспортном средстве C.
Как результат, ускорение/замедление и скорость движения транспортного средства C могут представлять собой ускорение/замедление и скорость движения в зависимости от рабочей величины нажатия педали AP акселератора. Соответственно, во время движения, при котором рабочая величина нажатия педали AP акселератора является постоянной, можно подавлять изменение ускорения/замедления и скорости транспортного средства в зависимости от изменения уклона поверхности дороги.
Дополнительно, когда уклон поверхности дороги является большим в восходящем направлении, движущая сила может увеличиваться (уменьшение тормозной силы), и когда уклон поверхности дороги является большим в направлении вниз, движущая сила может уменьшаться (увеличение тормозной силы). Соответственно, можно подавлять отклонение между изменением ускорения/замедления, сгенерированным посредством изменения уклона поверхности дороги, и изменением ускорения/замедления, допущенным водителем.
Соответственно, во время движения, при котором водитель нажимает педаль акселератора AP при рабочей величине, равной или большей порогового значения, даже если уклон поверхности дороги увеличивается в восходящем направлении, состояние, в котором движущая сила генерируется в транспортном средстве C, может поддерживаться. Дополнительно, во время движения, при котором водитель нажимает педаль акселератора AP с рабочей величиной, меньшей порогового значения, даже если уклон поверхности дороги увеличивается в направлении вниз, состояние, в котором тормозная сила генерируется в транспортном средстве C, может поддерживаться.
Соответственно, можно подавлять возникновение ситуации, когда водитель с намерением ускорения может увеличивать рабочую величину нажатия педали AP акселератора вследствие изменения уклона поверхности дороги, который управляется с рабочей величиной, равной или большей порогового значения.
Дополнительно, можно подавлять возникновение ситуации, когда водитель с намерением замедления может уменьшать рабочую величину нажатия педали AP акселератора вследствие изменения уклона поверхности дороги, который управляется с рабочей величиной, меньшей порогового значения.
(2) Уравновешивающий момент, который представляет собой тормозной момент или движущий момент, допускающий поддержание остановленного состояния транспортного средства C на поверхности проезжей дороги, вычисляется на основе направления уклона поверхности дороги и величины уклона. Базовая тормозная сила и базовая движущая сила, которые задаются посредством карты тормозной/движущей силы, непрерывно корректируются таким образом, что они увеличиваются, или корректируются таким образом, что они уменьшаются, на основе вычисленного уравновешивающего момента, чтобы задавать скорректированную тормозную силу или скорректированную движущую силу.
Другими словами, базовая тормозная сила и базовая движущая сила, которые задаются посредством карты тормозной/движущей силы, непрерывно корректируются таким образом, что они увеличиваются, или корректируются таким образом, что они уменьшаются, на основе уравновешивающего момента, чтобы корректировать базовую движущую силу или базовую тормозную силу.
Следовательно, можно задавать скорректированную тормозную силу или скорректированную движущую силу посредством смещения карты тормозной/движущей силы, когда поверхность проезжей дороги представляет собой ровную дорогу, на основе направления уклона поверхности дороги и величины уклона в направлении вдоль изменения степени открытия педали AP акселератора.
Как результат, в процессе смещения карты тормозной/движущей силы, заданного заранее в одном направлении, можно корректировать базовую тормозную силу и базовую движущую силу на основе направления уклона поверхности дороги и величины уклона и задавать скорректированную тормозную силу или скорректированную движущую силу.
Посредством непрерывного смещения карты тормозной/движущей силы на основе направления уклона поверхности дороги и величины уклона в направлении вдоль изменения степени открытия педали AP акселератора, можно задавать скорректированную тормозную силу или скорректированную движущую силу. Соответственно, посредством непрерывной коррекции базовой тормозной силы и базовой движущей силы относительно изменения в направлении уклона поверхности дороги и величины уклона, можно задавать скорректированную тормозную силу или скорректированную движущую силу.
(3) Карта тормозной/движущей силы включает в себя зону изменения, в которой по мере того, как скорость движения уменьшается (приближается к 0), базовая тормозная сила уменьшается, и степень изменения базовой тормозной силы в зависимости от изменения скорости движения в зоне изменения равна или меньше предельного усиления системы управления. Дополнительно, предельное усиление системы управления представляет собой верхний предел степени изменения таким образом, что изменение скорости движения может следовать за изменением базовой тормозной силы (рекуперативной тормозной силы).
Таким образом, степень изменения базовой тормозной силы в зоне изменения карты тормозной/движущей силы равна или меньше предельного усиления системы управления.
Как результат, во время движения, при котором рабочая величина нажатия педали AP акселератора является постоянной, даже если направление уклона поверхности дороги изменяется, изменение скорости транспортного средства может всегда следовать за изменением замедления в зависимости от базовой тормозной силы и базовой движущей силы.
(4) Уравновешивающий момент умножается на вспомогательный коэффициент усиления, который уменьшается с максимального значения по мере того, как скорость движения увеличивается от заданной скорости транспортного средства. Базовая тормозная сила и базовая движущая сила, вычисленные посредством карты тормозной/движущей силы, непрерывно корректируются таким образом, что они увеличиваются, или корректируются таким образом, что они уменьшаются, на основе значения, полученного посредством умножения уравновешивающего момента на вспомогательный коэффициент усиления, чтобы задавать скорректированную тормозную силу или скорректированную движущую силу.
Таким образом, по мере того, как скорость движения приближается к заданной скорости транспортного средства (0 (км/ч)), тормозная сила или движущая сила, которая может поддерживать остановленное состояние транспортного средства C, генерируется. Дополнительно, в состоянии, в котором скорость движения увеличивается с заданной скорости транспортного средства (0 (км/ч)), и транспортное средство C проводит нормальное движение, величина коррекции для коррекции базовой тормозной силы и базовой движущей силы на основе направления уклона поверхности дороги и величины уклона может уменьшаться.
Как результат, в состоянии, в котором транспортное средство C проводит нормальное движение, дискомфорт, ощущаемый водителем, может уменьшаться.
(5) Степень уменьшения вспомогательного коэффициента усиления, который уменьшается по мере того, как скорость движения увеличивается, равна или меньше предельного усиления системы управления.
Таким образом, степень уменьшения вспомогательного коэффициента усиления на карте вспомогательного коэффициента усиления равна или меньше предельного усиления системы управления.
Как результат, во время движения, при котором рабочая величина нажатия педали AP акселератора является постоянной, даже если направление уклона поверхности дороги изменяется, изменение скорости транспортного средства может всегда следовать за изменением замедления в зависимости от базовой тормозной силы и базовой движущей силы.
(6) Карта тормозной/движущей силы представляет собой карту для генерирования тормозной силы для остановки транспортного средства C, когда рабочая величина нажатия педали AP акселератора равна или меньше пороговой рабочей величины для остановки (0).
Таким образом, когда водитель прекращает управление педалью AP акселератора (водитель снимает ногу с педали AP акселератора) до тех пор, пока транспортное средство C не будет остановлено, тормозная сила для остановки движущегося транспортного средства C может генерироваться.
Как результат, транспортное средство C может быть остановлено только с помощью операции нажатия педали AP акселератора без нажатия педали BP тормоза.
(7) На основе скорректированной тормозной силы (заданной скорректированной тормозной силы), вычисляется первая рекуперативная тормозная сила. Дополнительно, вторая рекуперативная тормозная сила вычисляется на основе рабочей величины нажатия педали BP тормоза и скорости движения транспортного средства C. Когда рабочая величина нажатия педали AP акселератора меньше порогового значения, и педаль BP тормоза нажимается, большая рекуперативная тормозная сила из первой рекуперативной тормозной силы и второй рекуперативной тормозной силы генерируется посредством приводного электромотора DM.
Таким образом, даже если педаль BP тормоза нажимается в состоянии, в котором генерируется рекуперативная тормозная сила в зависимости от направления уклона поверхности дороги и величины уклона, только большая рекуперативная тормозная сила из первой рекуперативной тормозной силы и второй рекуперативной тормозной силы генерируется посредством приводного электромотора DM.
Как результат, можно генерировать бóльшую рекуперативную тормозную силу из первой рекуперативной тормозной силы и второй рекуперативной тормозной силы в ситуации, в которой педаль BP тормоза нажимается в состоянии, в котором рекуперативная тормозная сила в зависимости от рабочей величины нажатия педали AP акселератора генерируется. Это предотвращает одновременный ввод двух рекуперативных тормозных сил, подавляет флуктуацию в рекуперативной тормозной силе и подавляет флуктуацию в скорости транспортного средства, не намеченной водителем, в то время когда транспортное средство движется.
Соответственно, поскольку рыскание результирующей фактической величины рекуперативной тормозной силы может предотвращаться, и приводной электромотор DM может надлежащим образом управляться, транспортное средство C может плавно останавливаться.
Генерируется большая рекуперативная тормозная сила из первой рекуперативной тормозной силы и второй рекуперативной тормозной силы, и генерируется фрикционная тормозная сила, соответствующая меньшей рекуперативной тормозной силе из первой рекуперативной тормозной силы и второй рекуперативной тормозной силы.
Соответственно, тормозная сила, полученная посредством суммирования первой рекуперативной тормозной силы и второй рекуперативной тормозной силы, может генерироваться с рекуперативной тормозной силой, и фрикционная тормозная сила и замедления в зависимости от тормозной силы, полученной посредством суммирования первой рекуперативной тормозной силы и второй рекуперативной тормозной силы, могут генерироваться в транспортном средстве C.
Можно расширять диапазон применения управления в ситуации, в которой педаль BP тормоза нажимается, когда генерируется рекуперативная тормозная сила в зависимости от рабочей величины нажатия педали AP акселератора, и транспортное средство замедляется.
Со ссылкой на фиг. 1-16A и 16B, с использованием фиг. 17, 18A и 18B ниже описываются преимущества, получаемые от вышеописанного способа. Другими словами, пояснение приводится в отношении преимущества генерирования большей рекуперативной тормозной силы из первой и второй рекуперативной тормозной силы в приводном электромоторе DM, когда рабочая величина нажатия педали AP акселератора меньше порогового значения, и педаль BP тормоза нажимается.
В конфигурации, в которой могут генерироваться рекуперативная тормозная сила в зависимости от рабочей величины нажатия педали AP акселератора и рекуперативная тормозная сила в зависимости от рабочей величины нажатия педали BP тормоза, с использованием отдельных карт тормозной силы (две карты тормозной силы), рекуперативная тормозная сила, которая должна генерироваться, задается в зависимости от запрашиваемого замедления и скорости транспортного средства. Это обусловлено тем, что поскольку рекуперативная тормозная сила в зависимости от рабочей величины нажатия педали AP акселератора отличается от рекуперативной тормозной силы в зависимости от рабочей величины нажатия педали BP тормоза в основном способе использования, с учетом пригодности и т.п., предпочтительно управлять каждой из рекуперативных тормозных сил на основе отдельной карты.
Тем не менее, когда педаль BP тормоза нажимается во время SS-управления, как проиллюстрировано на фиг. 17, например, верхние пределы рекуперативных тормозных сил (предельная линия рекуперации, линия распределения координации рекуперативной тормозной силы) суммируются на двух картах тормозной силы. Соответственно, как проиллюстрировано на фиг. 17, верхний предел запроса на рекуперацию становится большим. Таким образом, в зоне изменения, в которой верхний предел рекуперативной тормозной силы изменяется в зависимости от изменения скорости транспортного средства, степень изменения замедления относительно изменения скорости транспортного средства быстро увеличивается по сравнению с отдельной картой тормозной силы (см. фиг. 6, фиг. 12). Следует отметить, что "SS-управление" указывает состояние, в котором в ситуации, в которой педаль BP тормоза не нажимается, выводится рекуперативная тормозная сила, которая может плавно останавливать транспортное средство C.
Следует отметить, что на фиг. 17, область, соответствующая рекуперативной тормозной силе, представляется как "рекуперация", линия, представляющая верхний предел рекуперативной тормозной силы в зависимости от скорости транспортного средства, представляется как "предельная линия рекуперации", и линия, представляющая верхний предел рекуперативной тормозной силы в зависимости от рабочей величины нажатия педали BP тормоза и скорости транспортного средства, представляется как "линия распределения координации рекуперативной тормозной силы". Дополнительно, скорость транспортного средства, соответствующая граничной линии между зоной изменения, в которой верхний предел рекуперативной тормозной силы изменяется в зависимости от изменения скорости транспортного средства, и фиксированной зоной, в которой верхний предел рекуперативной тормозной силы является постоянным, представляется как "пороговая скорость транспортного средства" и линия, полученная посредством продолжения сумм предельной линии рекуперации и линии распределения координации рекуперативной тормозной силы, представляется как "совокупное значение запроса на рекуперацию".
В зоне изменения, если степень изменения замедления относительно изменения скорости транспортного средства быстро увеличивается, в то время как транспортное средство C замедляется, изменение скорости транспортного средства не может следовать за быстрым изменением замедления в зависимости от рекуперативной тормозной силы, и относительно изменения замедления в зависимости от рекуперативной тормозной силы, вызывается задержка в изменении скорости транспортного средства.
Как проиллюстрировано на фиг. 18A, в течение периода после того, как скорость транспортного средства равна или меньше пороговой скорости транспортного средства, и уменьшение результирующей фактической величины рекуперативной тормозной силы начинается, до момента, когда транспортное средство C остановлено, изменение скорости транспортного средства не может придерживаться результирующей фактической величины рекуперативной тормозной силы, которая увеличивается с момента времени, когда замедление начинается, и рыскание вызывается в результирующей фактической величине рекуперативной тормозной силы. Следует отметить, что на фиг. 18A и 18B, момент времени, когда замедление начинается, обозначается с помощью "t6", момент времени, когда скорость транспортного средства равна или меньше пороговой скорости транспортного средства, и уменьшение результирующей фактической величины рекуперативной тормозной силы начинается, обозначается с помощью "t7", и момент времени, когда транспортное средство C остановлено, обозначается с помощью "t8".
Альтернативно, в способе управления тормозной/движущей силой согласно первому варианту осуществления, когда педаль BP тормоза нажимается во время SS-управления, большее значение выбирается из запрашиваемых значений, вычисленных посредством такого допущения, что предельная линия рекуперации или линия распределения координации рекуперативной тормозной силы представляет собой верхний предел. Таким образом, от момента t7 времени до момента t8 времени на фиг. 18B, верхнее предельное значение рекуперативной тормозной силы является не значением, полученным посредством суммирования предельной линии рекуперации и линии распределения координации рекуперативной тормозной силы, а значением, соответствующим той линии из предельной линии рекуперации или линии распределения координации рекуперативной тормозной силы, значение которой в зависимости от скорости транспортного средства превышает значение другой линии.
Таким образом, в способе управления тормозной/движущей силой согласно первому варианту осуществления, когда педаль BP тормоза нажимается во время SS-управления, изменение скорости транспортного средства соответствует результирующей фактической величине рекуперативной тормозной силы между моментом t7 времени и моментом t8 времени, и в силу этого, как проиллюстрировано на фиг. 18B, рыскание не возникает в результирующей фактической величине рекуперативной тормозной силы. Даже когда педаль BP тормоза нажимается в состоянии, в котором генерируется рекуперативная тормозная сила в зависимости от рабочей величины нажатия педали AP акселератора, приводной электромотор DM может надлежащим образом управляться, и в силу этого транспортное средство C может плавно останавливаться.
(8) Величина коррекции для коррекции базовой тормозной силы и базовой движущей силы при проведении управления автоматическим движением для обеспечения движения транспортного средства C на скорости движения, заданной заранее, меньше величины коррекции, когда управление автоматическим движением не проводится.
Таким образом, даже если тормозная сила и движущая сила посредством коррекции на основе уклона в зависимости от уклона поверхности дороги суммируются с запросом на тормозную силу или запросом на движущую силу водителя, тормозная сила и движущая сила посредством коррекции на основе уклона, когда управление автоматическим движением проводится, являются более ограниченными, чем тормозная сила и движущая сила посредством коррекции на основе уклона, когда управление автоматическим движением не проводится.
Как результат, когда транспортное средство C движется по ровной дороге и затем движется в подъем, можно предотвращать превышение, посредством значения, полученного посредством суммирования запроса тормозной/движущей силы водителя с движущей силой коррекции на основе уклона в зависимости от подъема, движущей силы, используемой для управления автоматическим движением. Соответственно, можно предотвращать установление перехвата управления водителем, не намеченного водителем, и можно определять то, устанавливается или нет перехват управления водителем, намеченный водителем.
Дополнительно, устройство 1 управления тормозной/движущей силой согласно первому варианту осуществления позволяет достигать следующих преимуществ.
(9) Устройство включает в себя модуль 42 определения уклона, который определяет величину уклона поверхности дороги, по которой движется транспортное средство C. Дополнительно, устройство включает в себя модуль 44 коррекции тормозной/движущей силы, который корректирует базовую тормозную силу или базовую движущую силу на основе величины уклона, определенной посредством модуля 42 определения уклона. Дополнительно, устройство включает в себя модуль управления тормозной силой (модуль 6 управления фрикционной тормозной силой, модуль 54 управления рекуперативной тормозной силой), который управляет тормозной силой, сгенерированной в транспортном средстве C, на основе скорректированной тормозной силы, и модуль 50 управления движущей силой, который управляет движущей силой, сгенерированной в транспортном средстве C, на основе скорректированной движущей силы.
Когда величина уклона поверхности дороги увеличивается, модуль 44 коррекции тормозной/движущей силы корректирует базовую тормозную силу таким образом, что она уменьшается, на основе величины уклона, или корректирует базовую движущую силу таким образом, что она увеличивается, на основе величины уклона поверхности дороги. С другой стороны, когда величина уклона поверхности дороги уменьшается, модуль 44 коррекции тормозной/движущей силы корректирует базовую тормозную силу таким образом, что она увеличивается, на основе величины уклона поверхности дороги, или корректирует базовую движущую силу таким образом, что она уменьшается, на основе величины уклона поверхности дороги.
Соответственно, базовая тормозная сила или базовая движущая сила корректируется на основе того, увеличивается или уменьшается величина уклона поверхности дороги. Дополнительно, транспортное средство C может управляться таким образом, что скорректированная тормозная сила или движущая сила генерируется.
Как результат, ускорение/замедление и скорость движения транспортного средства C могут представлять собой ускорение/замедление и скорость движения в зависимости от рабочей величины нажатия педали AP акселератора. Соответственно, во время движения, при котором рабочая величина нажатия педали AP акселератора является постоянной, изменение ускорения/замедления и скорости транспортного средства в зависимости от изменения уклона поверхности дороги может подавляться.
Когда уклон поверхности дороги больше в восходящем направлении, движущая сила может увеличиваться (уменьшение тормозной силы), и когда уклон поверхности дороги больше в направлении вниз, движущая сила может уменьшаться (увеличение тормозной силы). Таким образом, можно подавлять отклонение между изменением ускорения/замедления, сгенерированным посредством изменения уклона поверхности дороги, и изменением ускорения/замедления, допущенным водителем.
Соответственно, когда водитель нажимает педаль акселератора AP при рабочей величине, равной или большей порогового значения, и транспортное средство движется, даже если уклон поверхности дороги увеличивается в восходящем направлении, состояние, в котором движущая сила генерируется в транспортном средстве C, может поддерживаться. Дополнительно, когда водитель нажимает педаль акселератора AP при рабочей величине, меньшей порогового значения, и транспортное средство движется, даже если уклон поверхности дороги увеличивается в направлении вниз, может поддерживаться состояние, в котором тормозная сила генерируется в транспортном средстве C.
Соответственно, можно предотвращать возникновение ситуации, когда водитель с намерением ускорения может увеличивать рабочую величину нажатия педали AP акселератора вследствие изменения уклона поверхности дороги, который управляется с рабочей величиной, равной или большей порогового значения.
Дополнительно, можно предотвращать возникновение ситуации, когда водитель с намерением замедления может уменьшать рабочую величину нажатия педали AP акселератора вследствие изменения уклона поверхности дороги, который управляется с рабочей величиной, меньшей порогового значения.
Разновидность первого варианта осуществления
(1) Хотя в первом варианте осуществления, базовая тормозная сила и базовая движущая сила, вычисленные посредством карты тормозной/движущей силы, непрерывно корректируются таким образом, что они увеличиваются, или корректируются таким образом, что они уменьшаются на основе значения, полученного посредством умножения уравновешивающего момента на вспомогательный коэффициент усиления, способ не ограничен этим.
Другими словами, как проиллюстрировано на фиг. 19, например, базовая тормозная сила и базовая движущая сила, вычисленные посредством карты тормозной/движущей силы, могут непрерывно корректироваться таким образом, что они увеличиваются, или корректироваться таким образом, что они уменьшаются, только на основе уравновешивающего момента.
(2) В первом варианте осуществления, представляется только карта скорректированной тормозной/движущей силы (см. фиг. 9), используемая, когда транспортное средство C движется по поверхности дороги, имеющей уклон с подъемом. Тем не менее, карта скорректированной тормозной/движущей силы не ограничена этим, и фиг. 20 иллюстрирует, например, карту скорректированной тормозной/движущей силы, используемую, когда транспортное средство C движется по поверхности дороги, имеющей уклон под спуск.
(3) В первом варианте осуществления, как проиллюстрировано на фиг. 10, случай, в котором модуль 56a задания предельных значений задает постоянное предельное значение коррекции на основе уклона, описывается независимо от рабочей величины нажатия педали AP акселератора, но задание не ограничено этим.
Другими словами, как проиллюстрировано на фиг. 21, например, когда рабочая величина нажатия педали AP акселератора равна или выше рабочей величины, при которой перехват управления водителем четко устанавливается, по мере того, как рабочая величина нажатия педали AP акселератора увеличивается, предельное значение коррекции на основе уклона может увеличиваться. В этом случае, когда перехват управления водителем устанавливается, можно подавлять внезапное изменение тормозной силы и проводить плавный процесс. Аналогично, когда перехват управления водителем устанавливается, можно подавлять внезапное изменение движущей силы и проводить плавный процесс.
(4) В первом варианте осуществления, представляется только карта вспомогательного коэффициента усиления, указывающая взаимосвязь между скоростью транспортного средства и вспомогательный коэффициентом усиления (см. фиг. 8), когда транспортное средство C движется по поверхности дороги, имеющей уклон с подъемом. Тем не менее, карта вспомогательного коэффициента усиления не ограничена этим, и фиг. 22 иллюстрирует, например, карту вспомогательного коэффициента усиления, используемую, когда транспортное средство C движется по поверхности дороги, имеющей уклон под спуск.
(5) Хотя в первом варианте осуществления, базовая тормозная сила и базовая движущая сила, вычисленные посредством карты тормозной/движущей силы, корректируются на основе значения, полученного посредством умножения уравновешивающего момента на вспомогательный коэффициент усиления, коррекция не ограничена этим.
Базовая тормозная сила и базовая движущая сила, вычисленные посредством карты тормозной/движущей силы, могут корректироваться с использованием следующих процедур.
Во-первых, как проиллюстрировано на фиг. 23, например, в дополнение к уравновешивающему моменту, три типа вспомогательного коэффициента усиления вычисляются, и уравновешивающий момент умножается на три типа вспомогательного коэффициента усиления. С использованием значения, полученного посредством применения процесса подавления внезапного изменения (модуля ограничения темпа) к значению, полученному посредством умножения уравновешивающего момента на три типа вспомогательного коэффициента усиления, могут корректироваться базовая тормозная сила и базовая движущая сила, вычисленные на карте тормозной/движущей силы.
Следует отметить, что на фиг. 23, три типа вспомогательного коэффициента усиления представляются как "вспомогательный коэффициент 1 усиления", "вспомогательный коэффициент 2 усиления" и "вспомогательный коэффициент 3 усиления".
"Вспомогательный коэффициент 1 усиления" является аналогичным "вспомогательному коэффициенту усиления" первого варианта осуществления и вычисляется с использованием "карты 1 вспомогательного коэффициента усиления", которая представляет собой карту, аналогичную "карте вспомогательного коэффициента усиления" первого варианта осуществления.
"Вспомогательный коэффициент 2 усиления" вычисляется на основе рабочей величины нажатия педали AP акселератора. В частности, в "карту 2 вспомогательного коэффициента усиления", проиллюстрированную на фиг. 23, рабочая величина нажатия педали AP акселератора вводится для вычисления. Следует отметить, что "карта 2 вспомогательного коэффициента усиления", проиллюстрированная на фиг. 23, указывает взаимосвязь между рабочей величиной нажатия педали AP акселератора и "вспомогательным коэффициентом 2 усиления", когда транспортное средство C движется на поверхности дороги, имеющей уклон с подъемом. Дополнительно, на "карте 2 вспомогательного коэффициента усиления", проиллюстрированной на фиг. 23, рабочая величина (степень открытия) педали AP акселератора обозначается с помощью ссылки с номером "APO".
Как указано на "карте 2 вспомогательного коэффициента усиления", "вспомогательный коэффициент 2 усиления", используемый для транспортного средства C, которое движется по поверхности дороги, имеющей уклон с подъемом, принимает максимальное значение 1, когда рабочая величина нажатия педали AP акселератора равна 0, т.е. в состоянии выключенного акселератора.
Дополнительные вертикальные направления "вспомогательного коэффициента 2 усиления", используемого для транспортного средства C, которое движется по поверхности дороги, имеющей уклон под спуск, и "вспомогательного коэффициента 2 усиления", используемого для транспортного средства C, которое движется по поверхности дороги, имеющей уклон с подъемом, изменены на противоположные на "карте 2 вспомогательного коэффициента усиления". Соответственно, формы "карты 2 вспомогательного коэффициента усиления" отличаются между периодом, когда транспортное средство движется по поверхности дороги, имеющей уклон с подъемом, и периодом, когда транспортное средство движется по поверхности дороги, имеющей уклон под спуск. Соответственно, когда транспортное средство движется по поверхности дороги, имеющей уклон с подъемом, в состоянии выключенного акселератора, "вспомогательный коэффициент 2 усиления" становится максимальным значением 1. С другой стороны, когда транспортное средство движется поверхность дороги, имеющая уклон под спуск, в состоянии выключенного акселератора, "вспомогательный коэффициент 2 усиления" становится минимальным значением.
"Вспомогательный коэффициент 3 усиления" вычисляется на основе направления уклона поверхности дороги и величины уклона. В частности, в "карту 3 вспомогательного коэффициента усиления", проиллюстрированную на фиг. 23, направление уклона поверхности дороги и величина уклона вводятся для вычисления.
Как указано на "карте 3 вспомогательного коэффициента усиления", в области, в которой уклон поверхности дороги является пологим (поверхность дороги с пологим уклоном), "вспомогательный коэффициент 3 усиления" аппроксимируется как максимальное значение 1. Альтернативно, в области, в которой уклон поверхности дороги является крутым (поверхность дороги с крутым уклоном), по мере того как, величина уклона увеличивается, "вспомогательный коэффициент 3 усиления" уменьшается.
В частности, на поверхности проезжей дороги, имеющей уклон, который не поддерживает остановленное состояние транспортного средства C, посредством задания "вспомогательного коэффициента 3 усиления" меньшим максимального значения (1), управление для отмены остановки движущегося транспортного средства C может проводиться.
(6) В первом варианте осуществления, величина коррекции для коррекции базовой тормозной силы и базовой движущей силы в зависимости от направления уклона поверхности дороги и величины уклона при проведении управления автоматическим движением меньше величины коррекции, когда управление автоматическим движением не проводится, но коррекция не ограничена этим.
Другими словами, когда управление автоматическим движением проводится, процесс коррекции базовой тормозной силы и базовой движущей силы может прекращаться. Другими словами, когда управление автоматическим движением проводится, вычисление скорректированной тормозной силы и скорректированной движущей силы может прекращаться, и любая из движущей силы, вычисленной посредством модуля 20 вычисления движущей силы на постоянной скорости, тормозной силы, вычисленной посредством модуля 22 вычисления тормозной/движущей силы согласно ITS, и движущей силы, вычисленной посредством модуля 22 вычисления тормозной/движущей силы согласно ITS, может генерироваться в транспортном средстве C.
В этом случае, когда управление автоматическим движением проводится, можно предотвращать суммирование движущей силы коррекции на основе уклона в зависимости от подъема с запросом тормозной/движущей силы водителя. Соответственно, установление перехвата управления водителем, не намеченного водителем, может предотвращаться, и может определяться то, устанавливается или нет перехват управления водителем, намеченный водителем.
(7) Хотя в первом варианте осуществления, карта тормозной/движущей силы используется для того, чтобы вычислять базовую тормозную силу и базовую движущую силу, способ не ограничен этим. Другими словами, например, уравнение, заданное заранее, может использоваться для того, чтобы вычислять базовую тормозную силу и базовую движущую силу.
Из числа базовых тормозных сил, уравнение для вычисления рекуперативной тормозной силы генерируется, например, из взаимосвязи между рабочей величиной нажатия педали AP акселератора, рабочей величиной нажатия педали BP тормоза, предельной линией рекуперации, линией распределения координации рекуперативной тормозной силы и т.п. Дополнительно, из числа базовых тормозных сил, уравнение для вычисления фрикционной тормозной силы генерируется, например, из взаимосвязи между рабочей величиной нажатия педали AP акселератора, рабочей величиной нажатия педали BP тормоза, рабочими характеристиками главного цилиндра 18 и колесного тормозного цилиндра WS, весом автомобиля для транспортного средства C и т.п. Уравнение для вычисления базовой движущей силы генерируется, например, из взаимосвязи между рабочей величиной нажатия педали AP акселератора, скоростью транспортного средства, рабочими характеристиками приводного электромотора DM, весом автомобиля для транспортного средства C и т.п.
(8) В первом варианте осуществления, в качестве источника приведения в движение, который прикладывает движущую силу к колесу W, используется приводной электромотор DM, но источник не ограничен этим, и в качестве источника приведения в движение, может использоваться двигатель.
(9) В первом варианте осуществления, уравновешивающий момент вычисляется на основе направления и величины уклона, включенных в сигнал уклона поверхности дороги, способ не ограничен этим. Таким образом, уравновешивающий момент может, например, вычисляться посредством использования датчика ускорения (G-датчик).
(10) В первом варианте осуществления, карта тормозной/движущей силы, когда поверхность проезжей дороги представляет собой ровную дорогу, смещается на основе направления и величины уклона поверхности дороги в направлении вдоль изменения степени открытия педали AP акселератора, чтобы задавать скорректированную тормозную силу или скорректированную движущую силу, способ не ограничен этим.
Таким образом, множество карта тормозной/движущей силы в зависимости от направления и величины уклона поверхности дороги сохраняются заранее, например, одна из множества карта тормозной/движущей силы может выбираться в зависимости от обнаруженного направления и величины уклона поверхности дороги, чтобы задавать скорректированную тормозную силу или скорректированную движущую силу.
Перечень номеров ссылок
1 - устройство управления тормозной/движущей силой
2 - модуль ITS-управления
4 - модуль управления электромотором
6 - модуль управления фрикционной тормозной силой
8 - датчик распознавания внешнего окружения
10 - переключатель задания скорости
12 - переключатель выбора режима
14 - модуль вычисления скорости транспортного средства
16 - датчик скорости вращения колес
18 - главный тормозной цилиндр
20 - модуль вычисления движущей силы на постоянной скорости
22 - модуль вычисления тормозной/движущей силы согласно ITS
24 - модуль задания ITS-вывода
26 - модуль вывода состояния ITS-управления
40 - модуль вычисления базовой тормозной/движущей силы
42 - модуль определения уклона
44 - модуль коррекции тормозной/движущей силы
44a - модуль вычисления уравновешивающего момента
44b - модуль вычисления вспомогательного коэффициента усиления
44c - модуль коррекции на основе уклона
46 - модуль управления арбитрированием
48 - модуль распределения тормозной/движущей силы
50 - модуль управления движущей силой
52 - модуль вычисления первой запрашиваемой тормозной силы
54 - модуль управления рекуперативной тормозной силой
56 - модуль ограничения коррекции
56a - модуль задания предельных значений
56b - модуль хранения верхних предельных значений
56c - модуль хранения нижних предельных значений
56d - модуль умножения предельных значений
56e - модуль переключения верхних предельных значений
56f - модуль коррекции верхних предельных значений
56g - модуль обработки ограничений
60 - модуль вычисления второй запрашиваемой тормозной силы
62 - модуль суммирования запрашиваемых тормозных сил
64 - модуль управления координацией рекуперативной тормозной силы
66 - модуль вычисления фрикционной тормозной силы
68 - модуль управления тормозным гидравлическим давлением
AP - педаль акселератора
APS - датчик акселератора
DM - приводной электромотор
MS - датчик частоты вращения электромотора
WS - колесный тормозной цилиндр
INV - инвертор
BAT - аккумулятор
BP - педаль тормоза
BPS - датчик тормоза
C - транспортное средство
TR - трансмиссия
W - колесо (левое переднее колесо WFL, правое переднее колесо WFR, левое заднее колесо WRL, правое заднее колесо WRR)
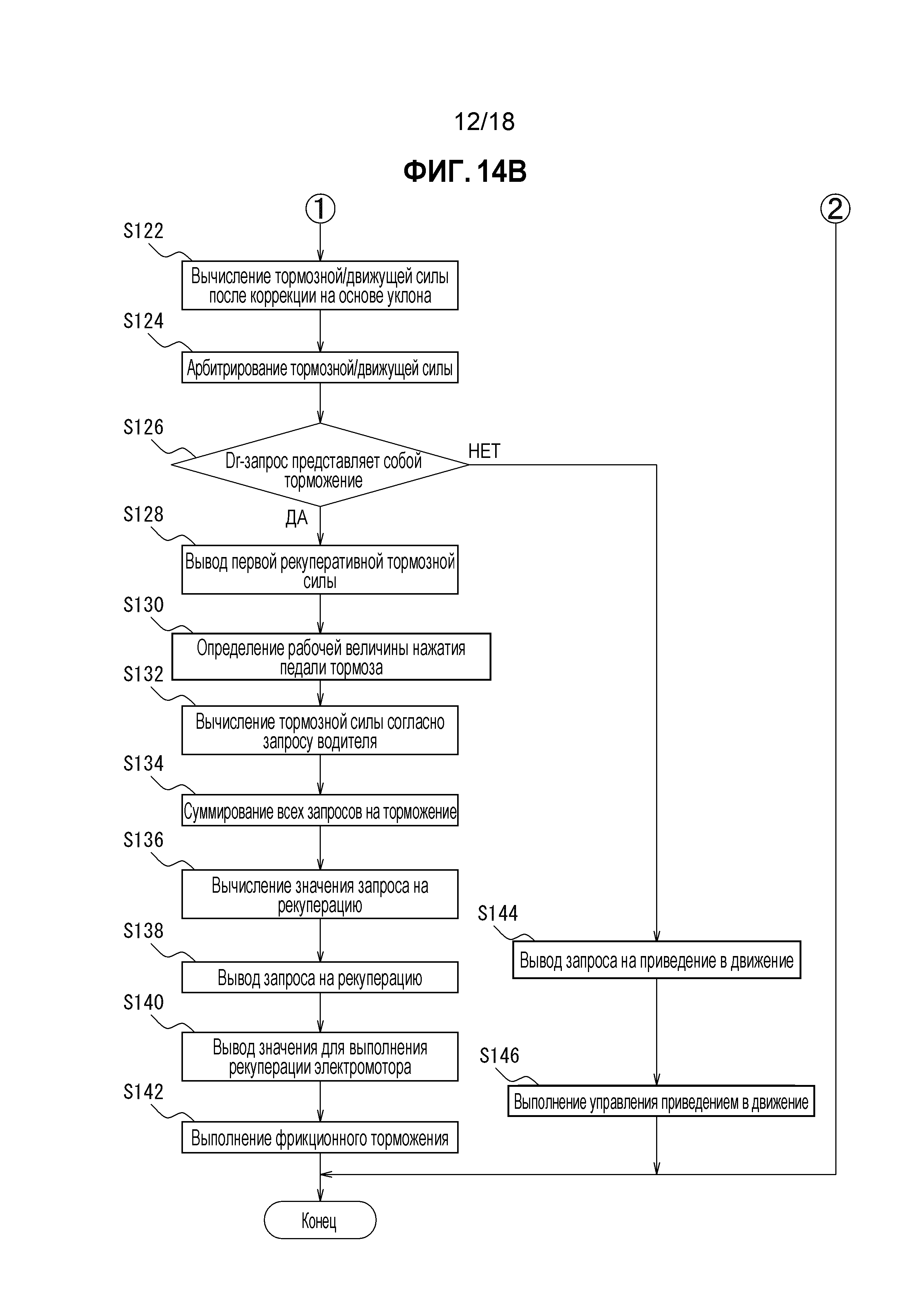
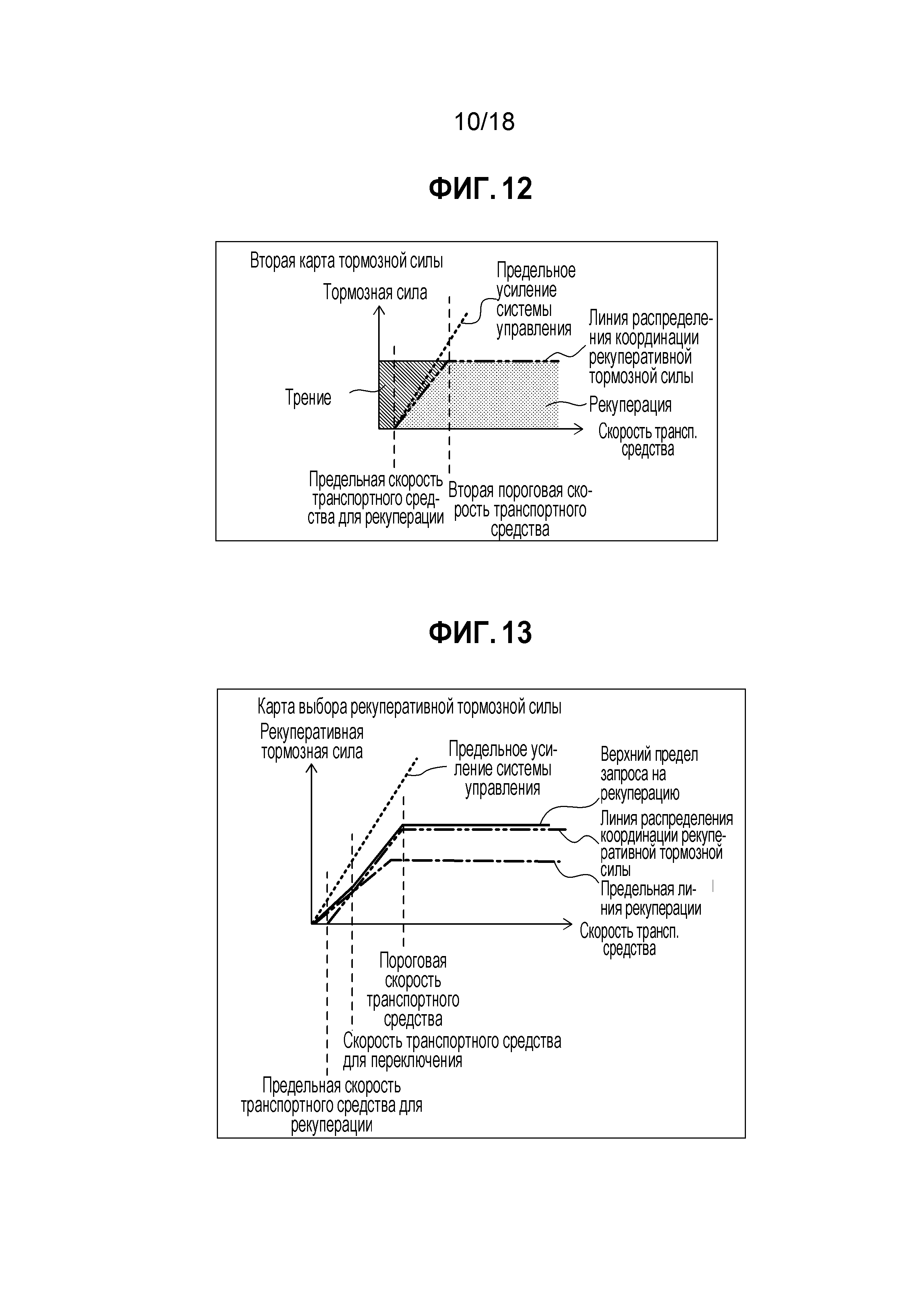
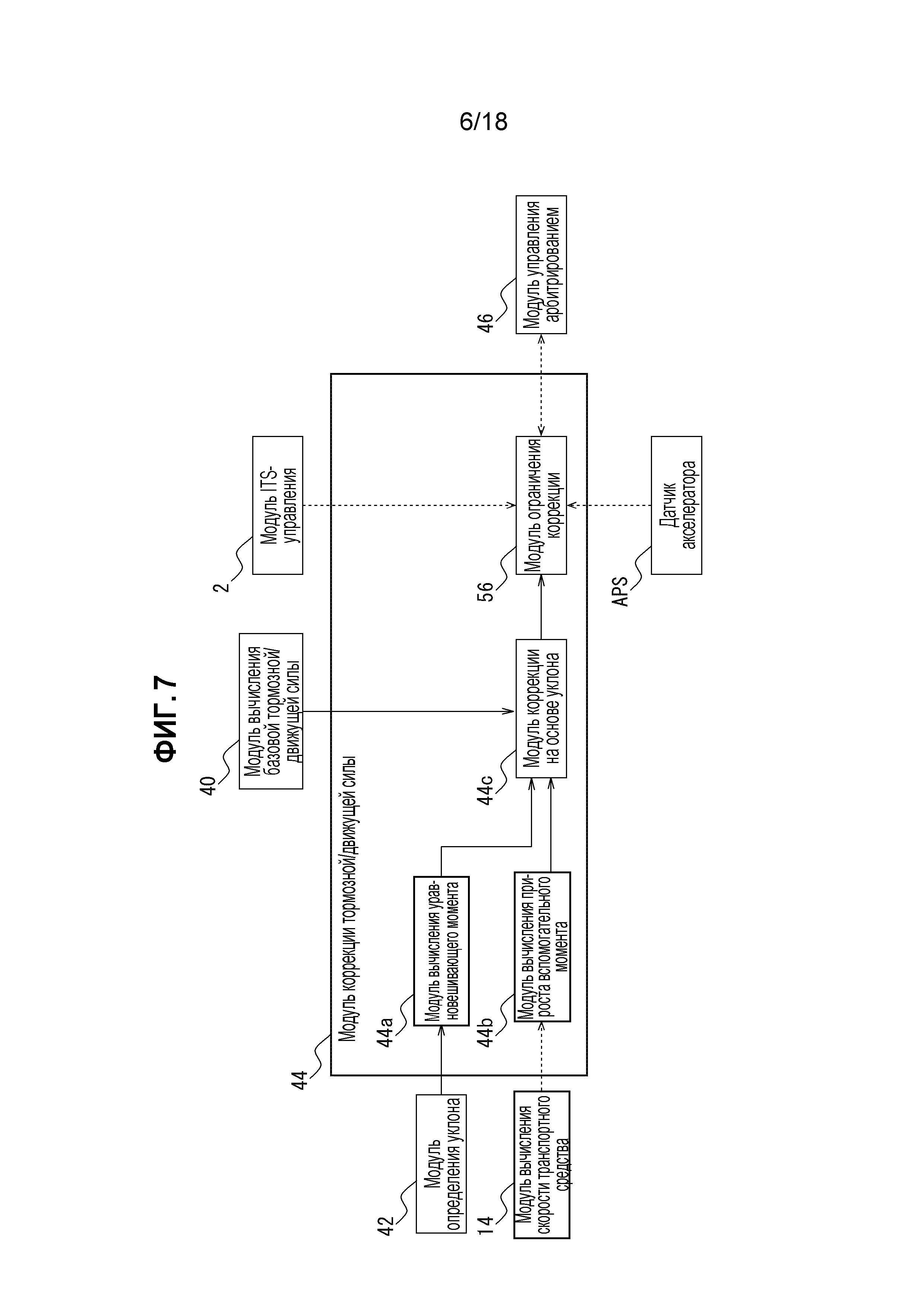
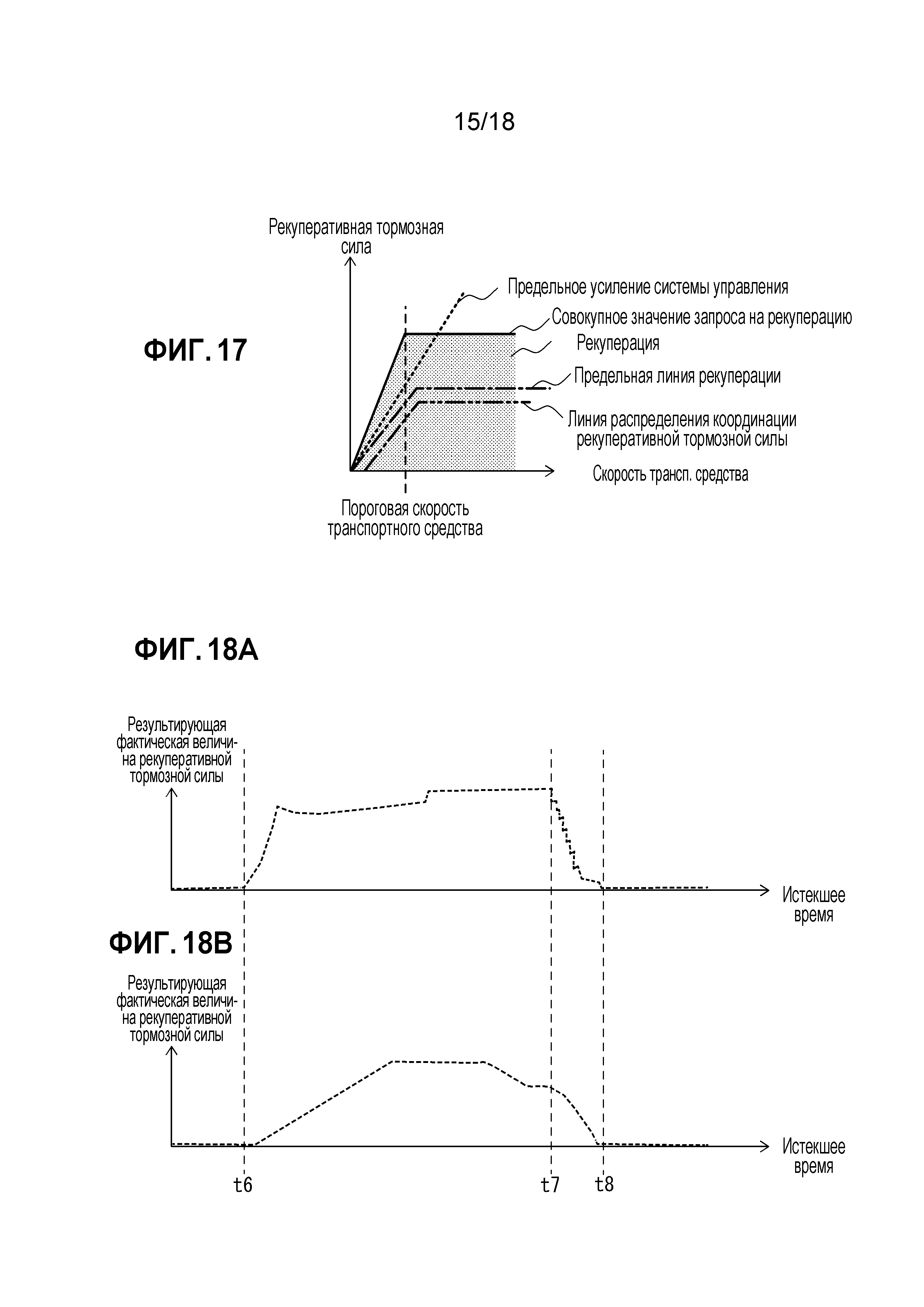
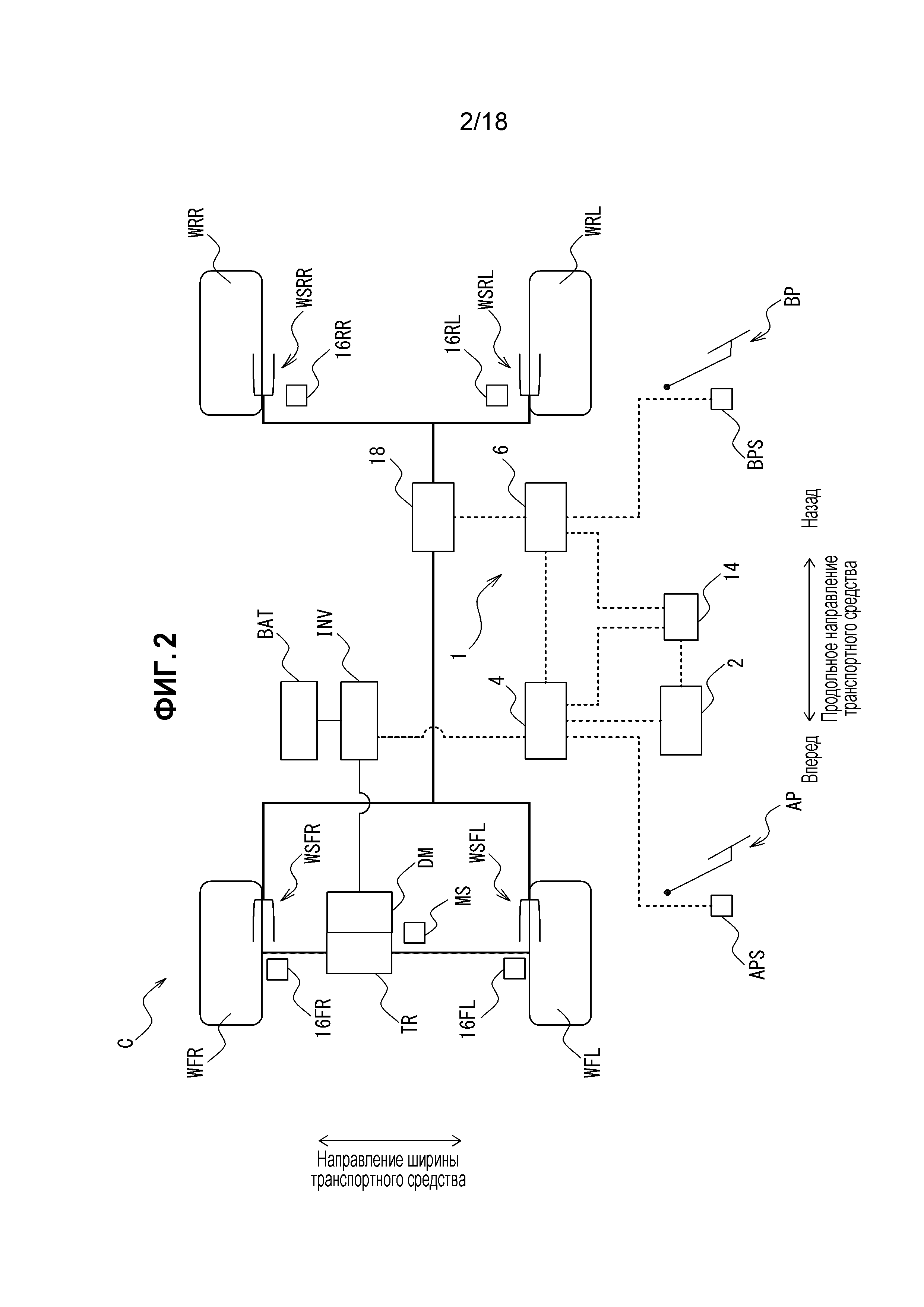
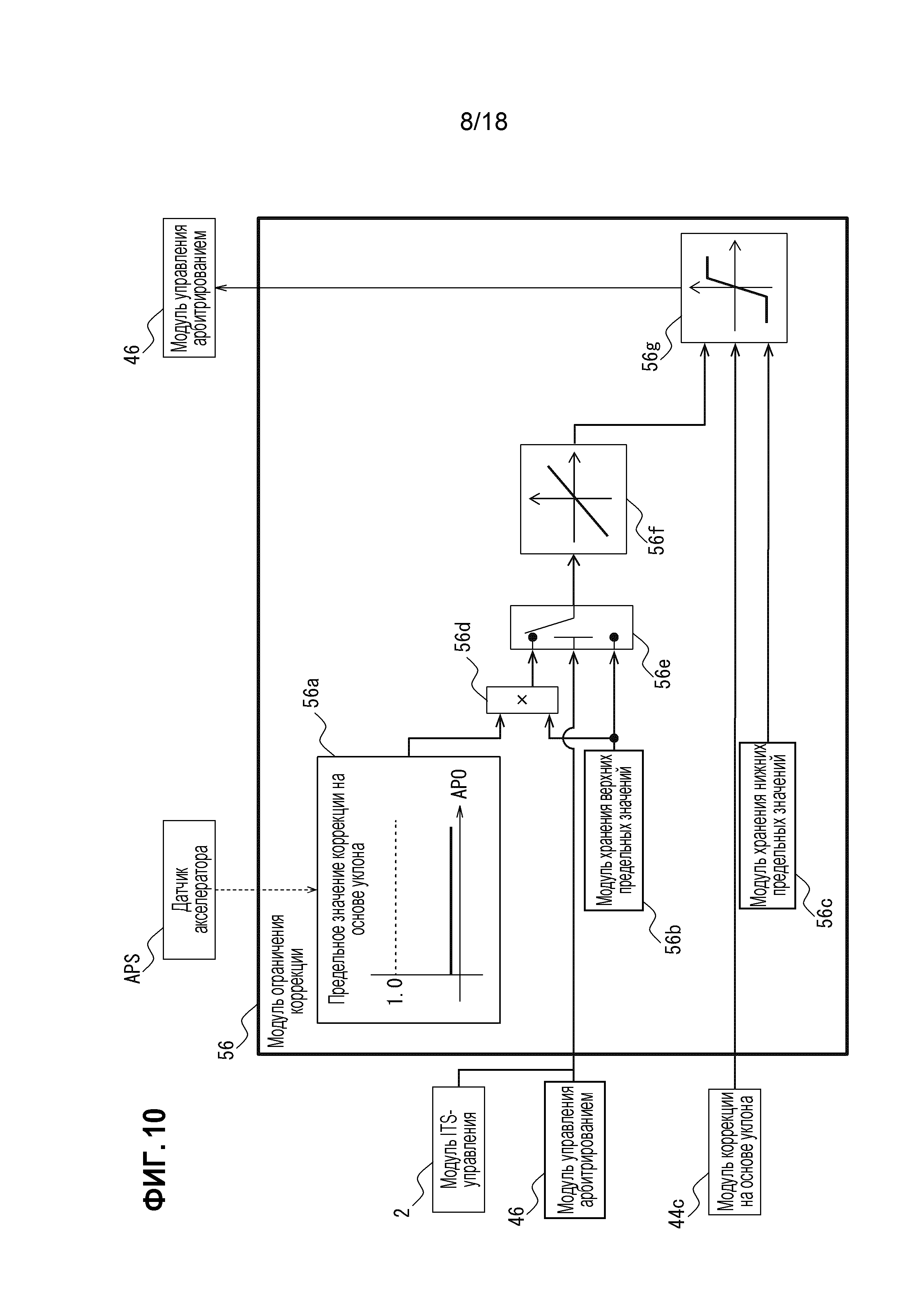
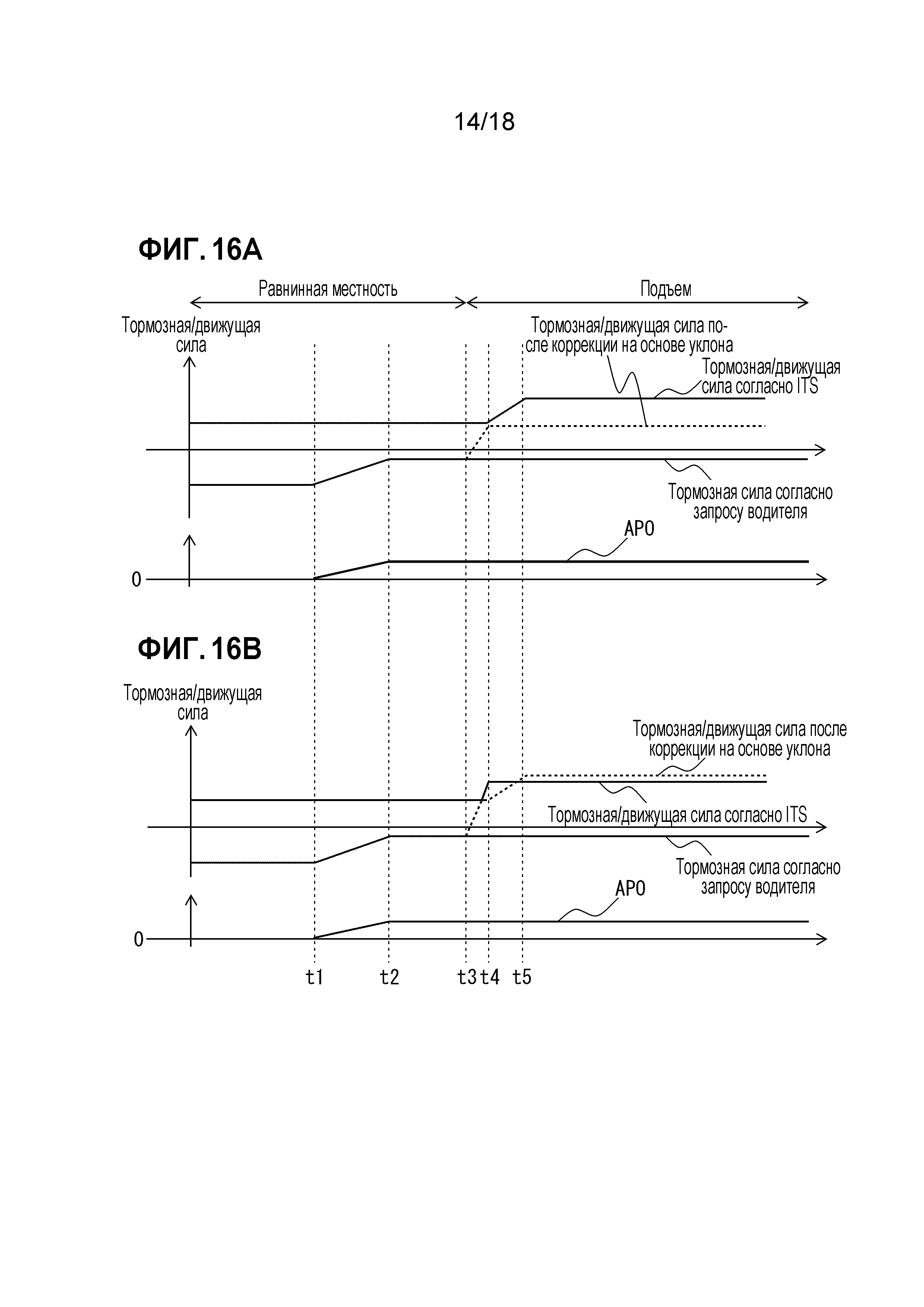
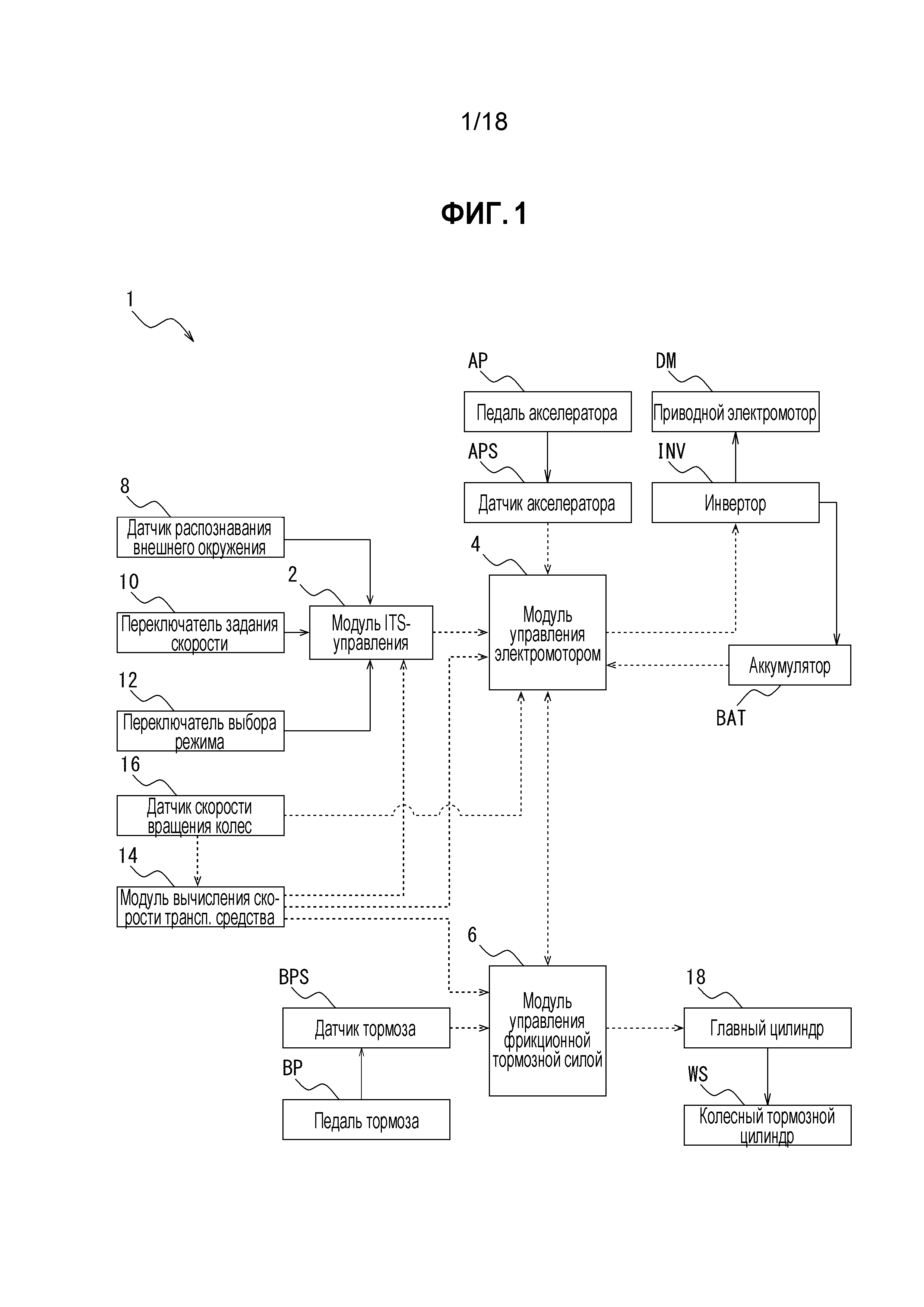
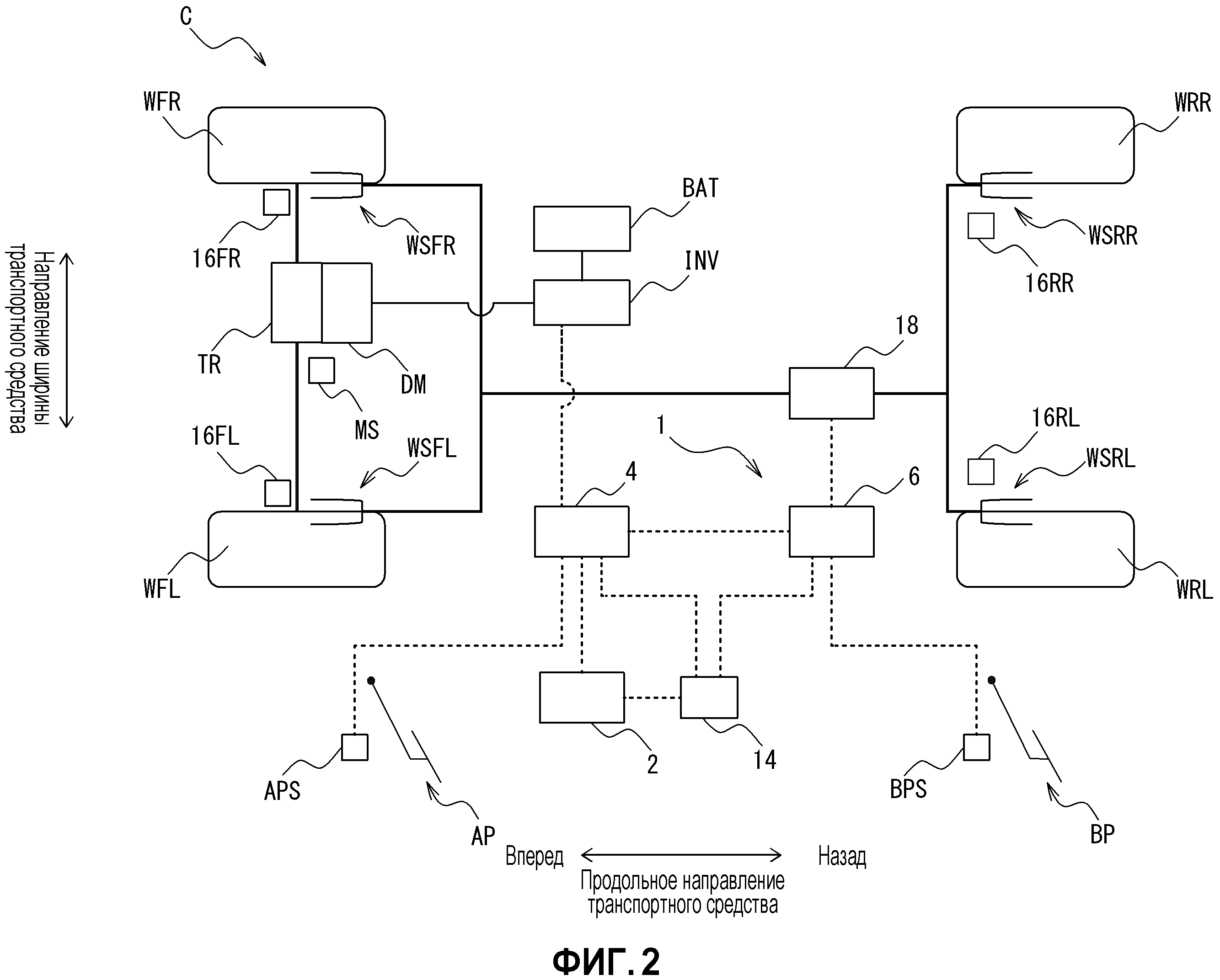
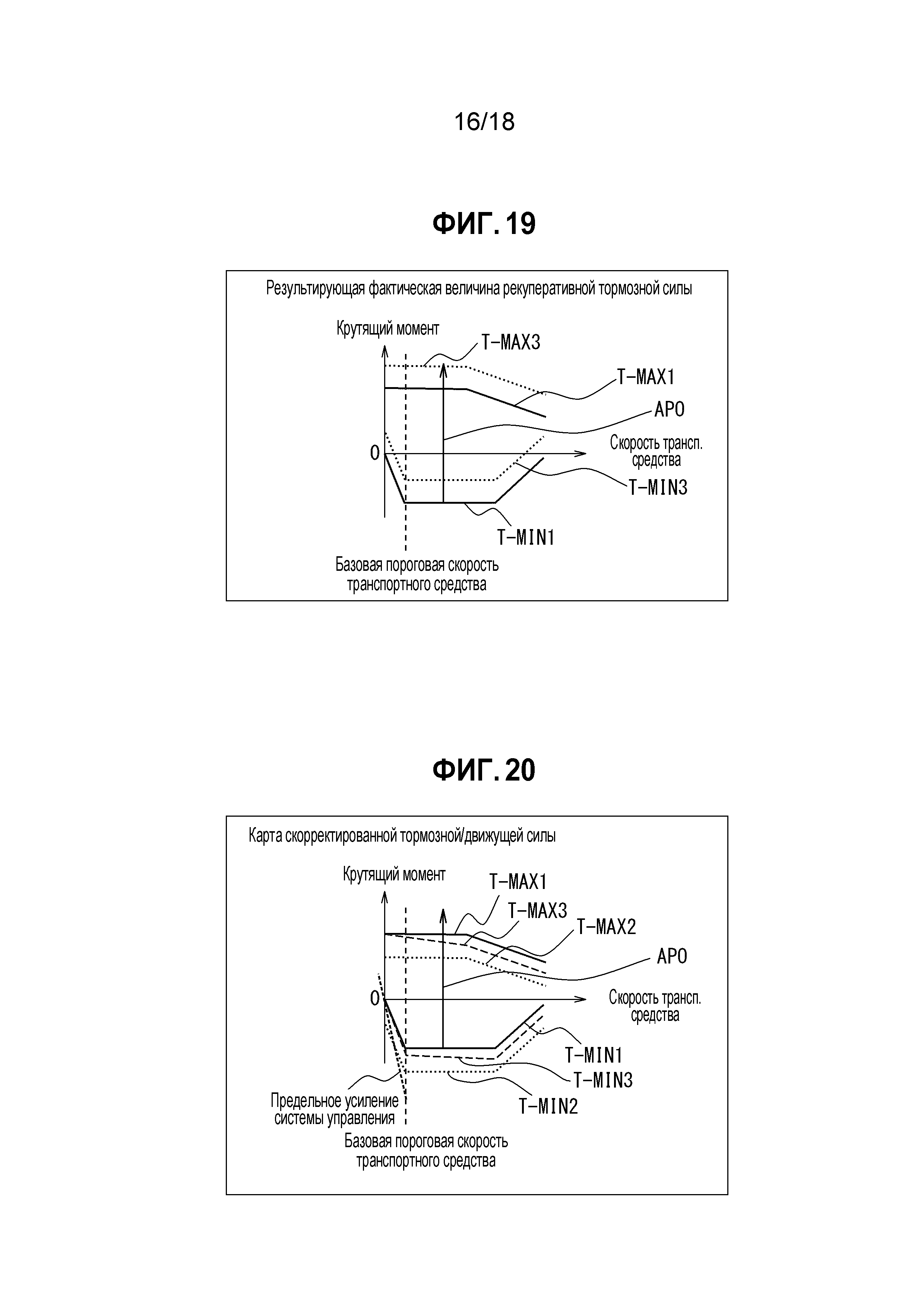
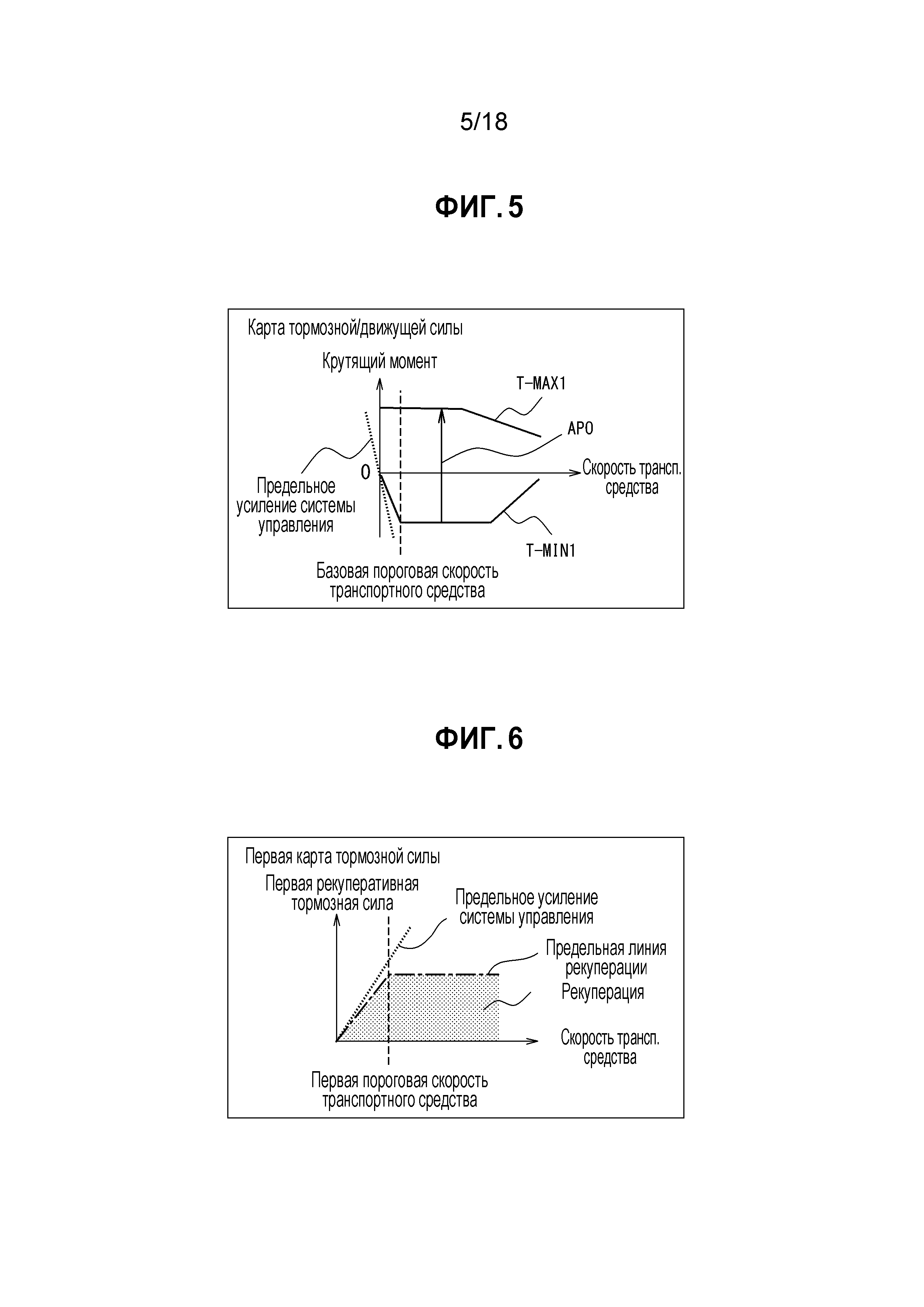
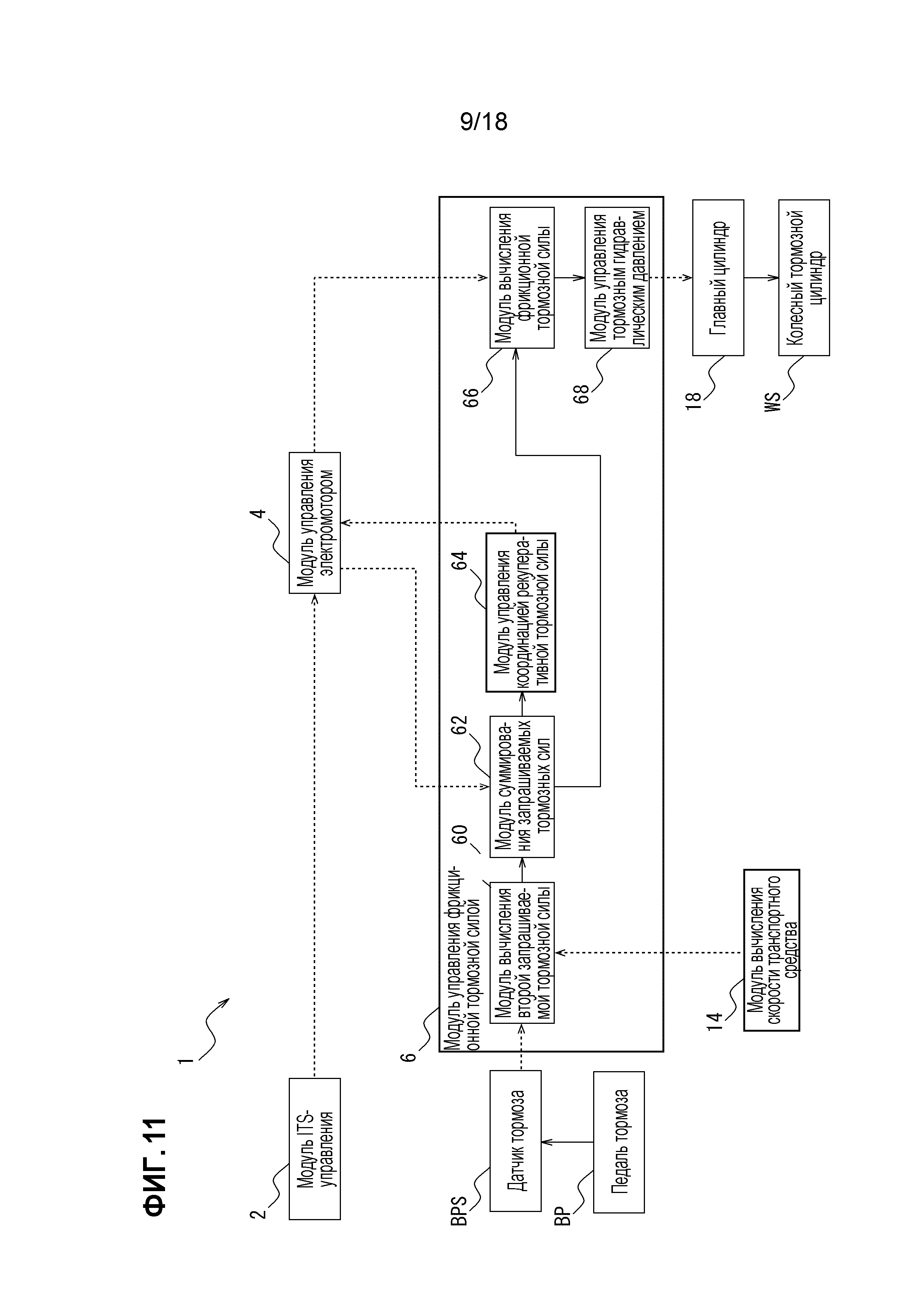
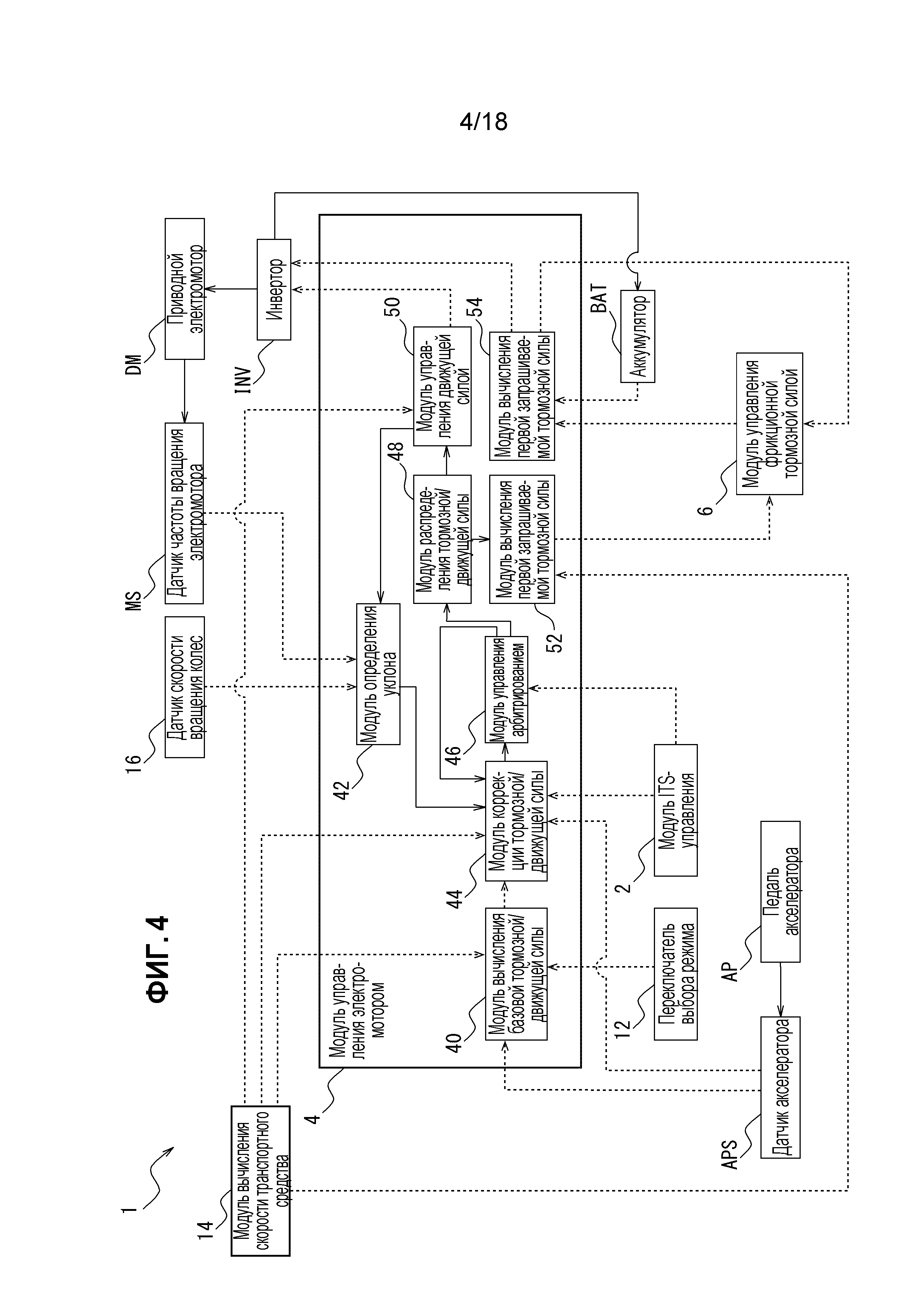
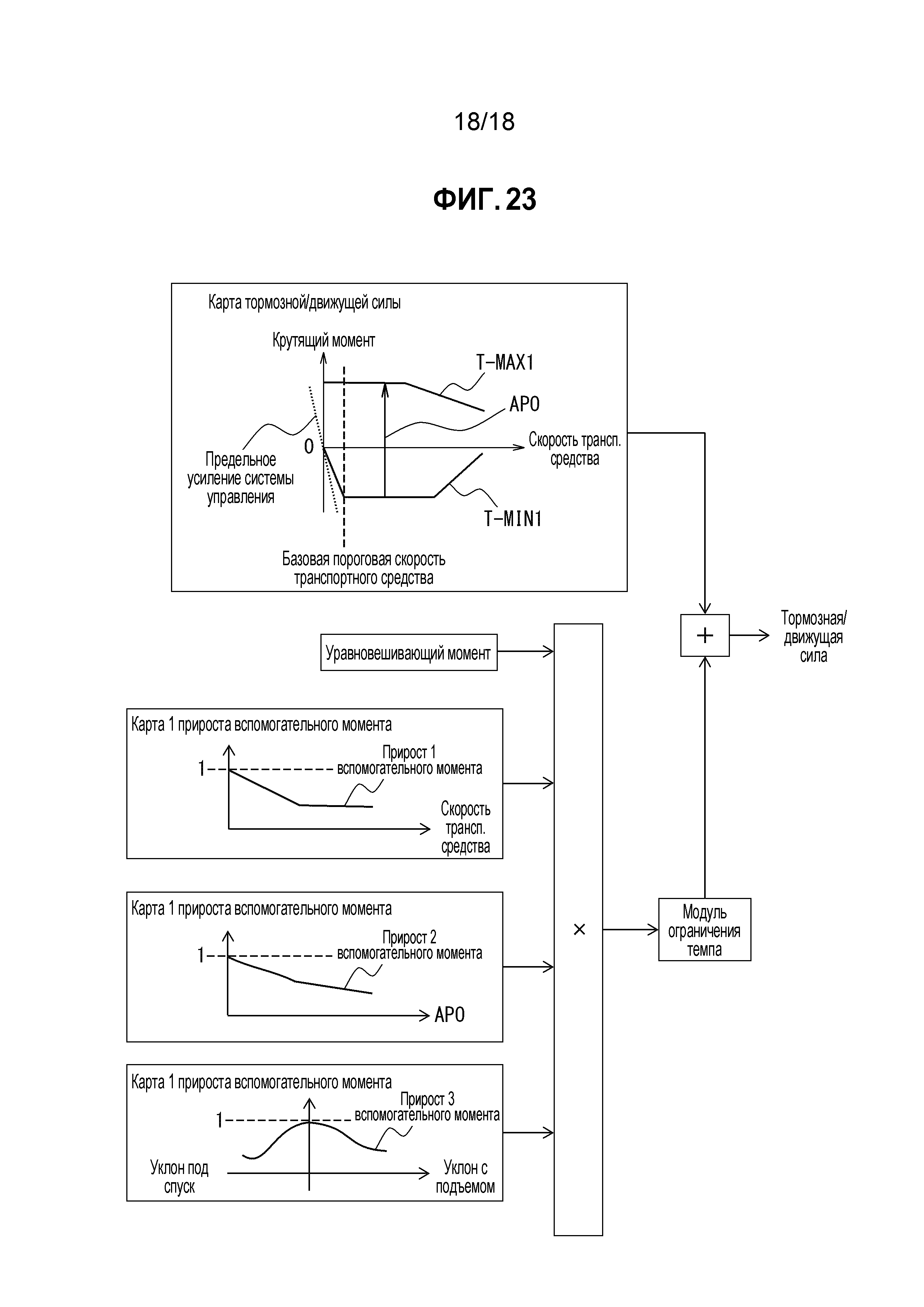
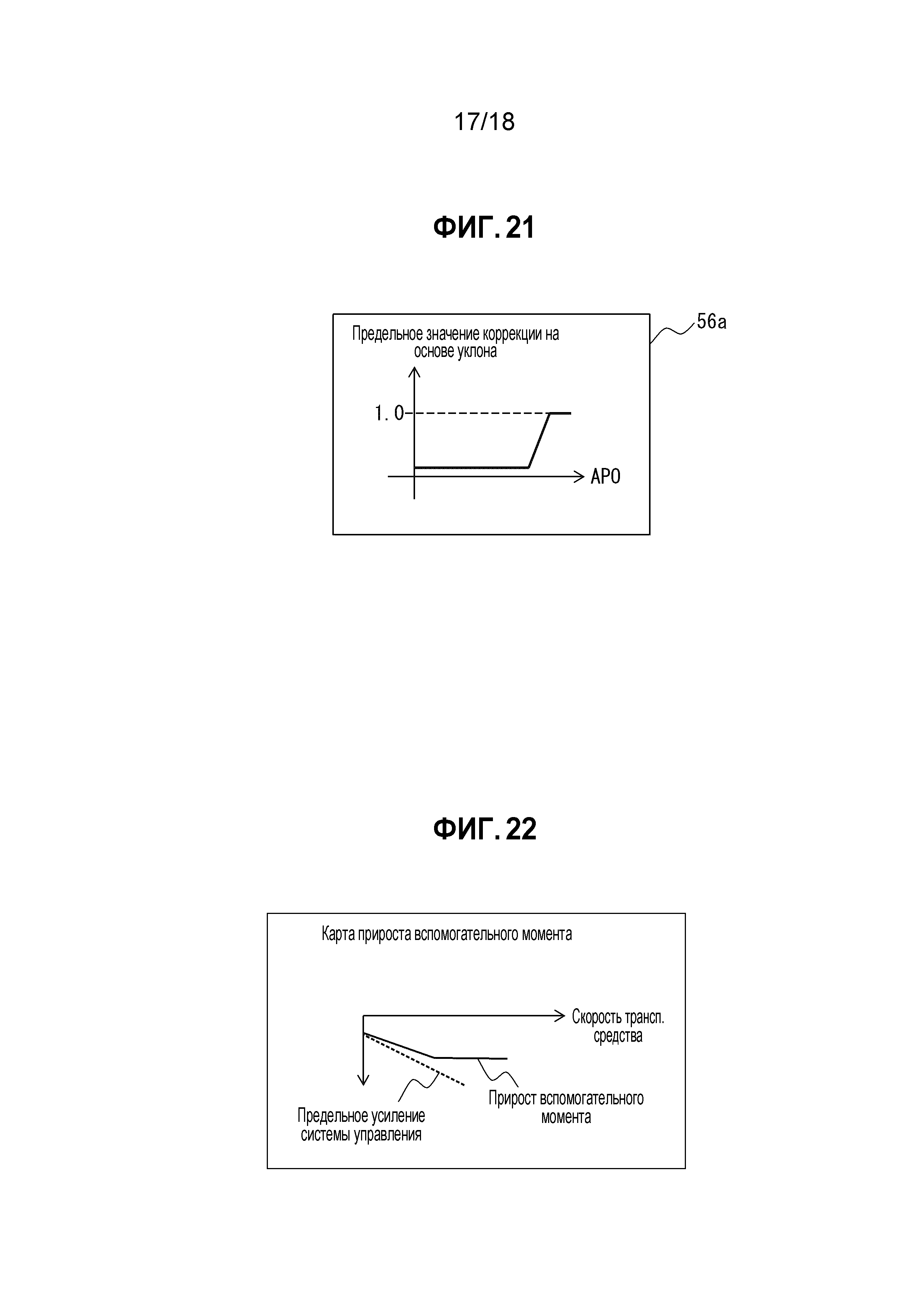
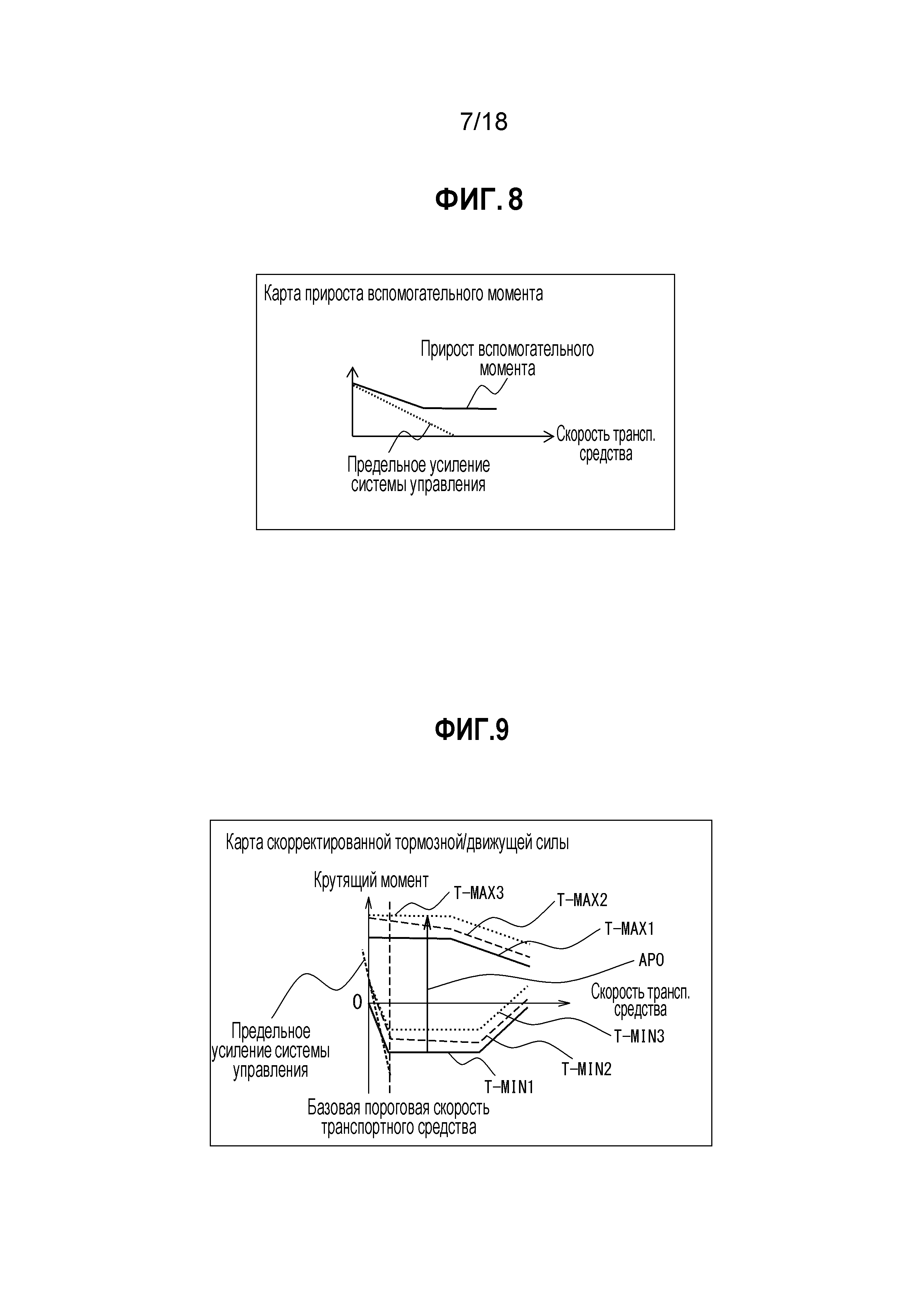
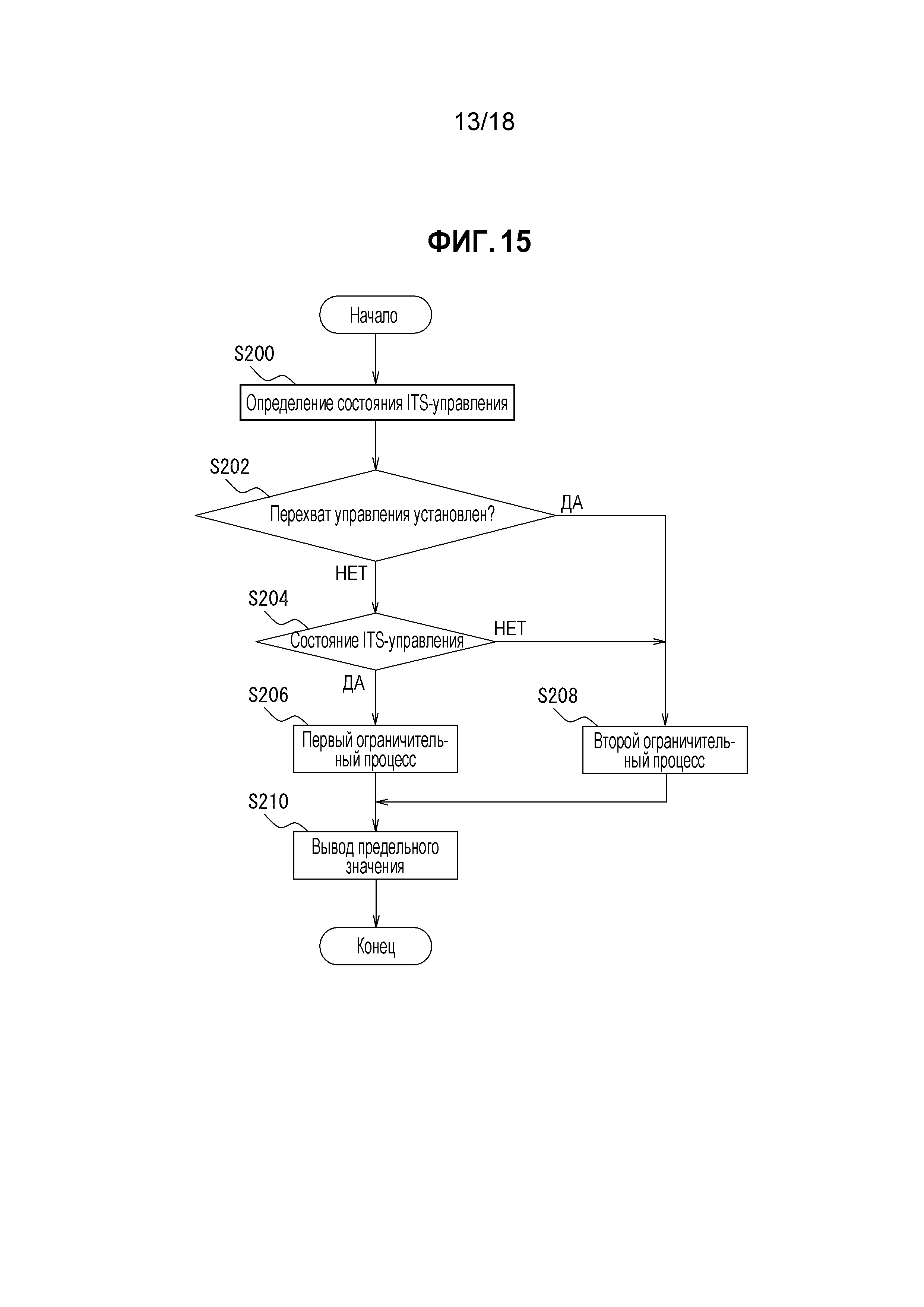
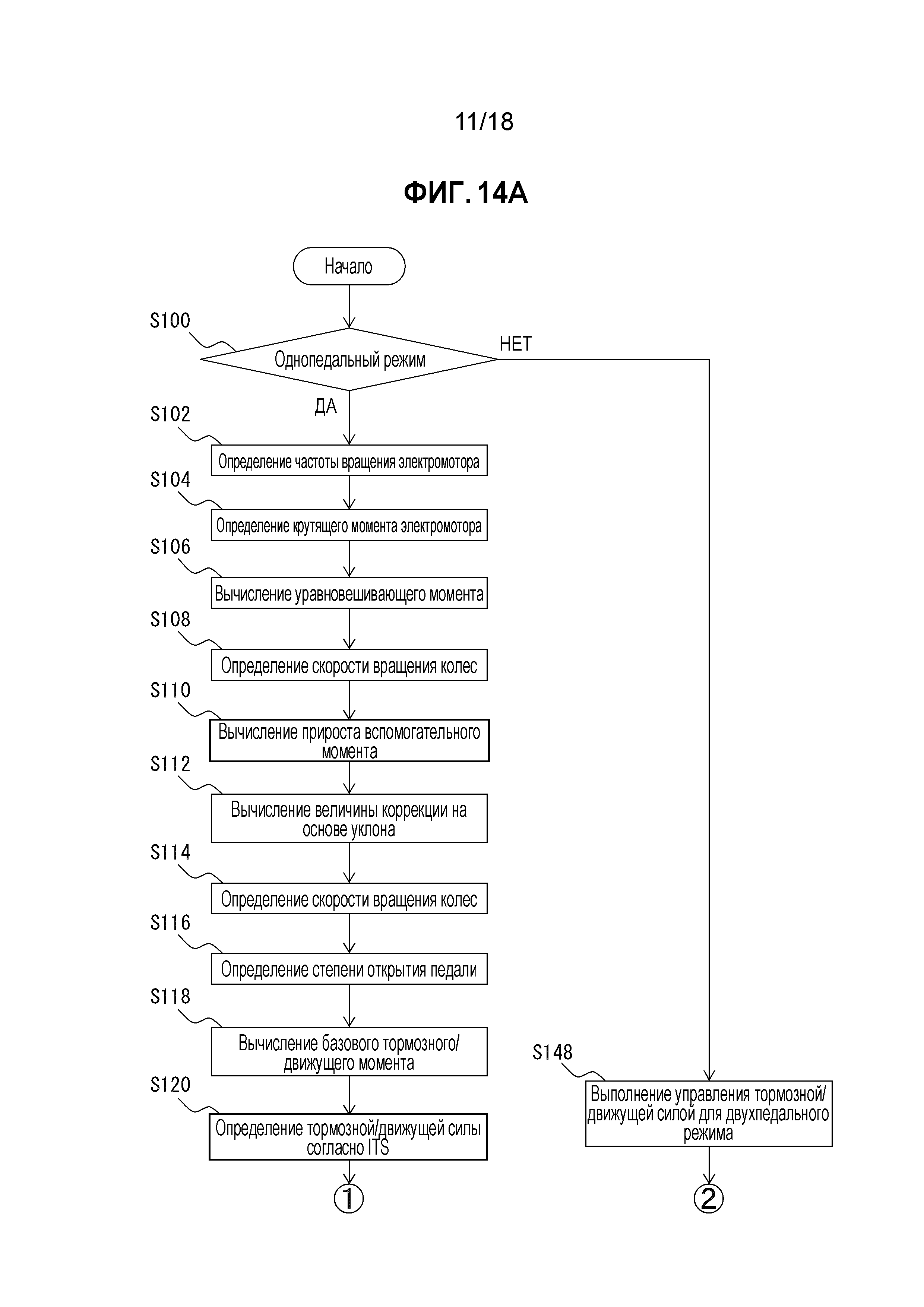
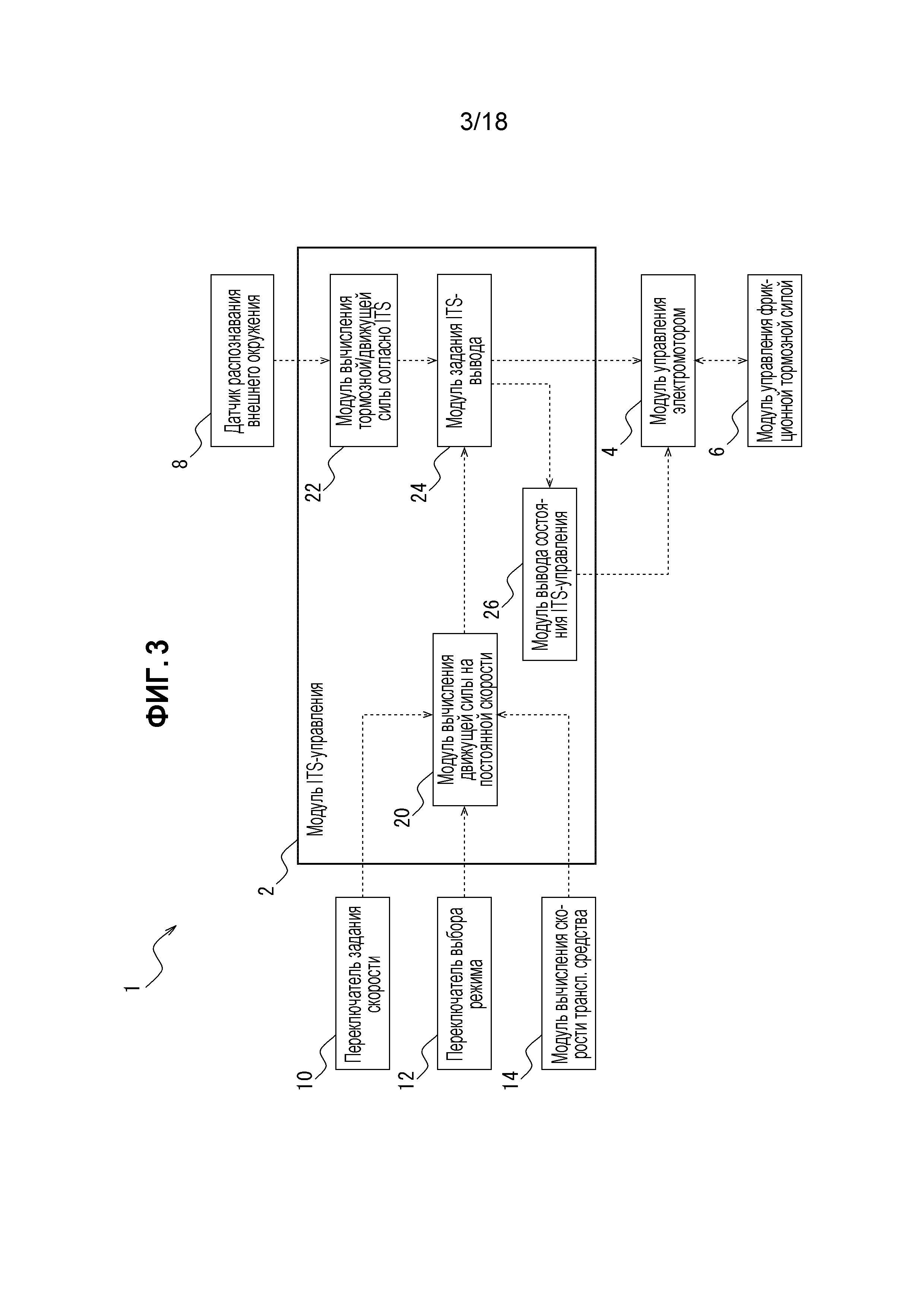
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Раствор для поверхностной обработки покрытого стального листа под горячее прессование
Способ управления электромотором электротранспортного средства и устройство управления электромотором электротранспортного средства
Способ и устройство для управления электромотором электрического транспортного средства

