Результат интеллектуальной деятельности: Способ проведения поисково-спасательных работ
Вид РИД
Изобретение
Изобретение относится к области жизненных потребностей человека, а более конкретно - к способам и устройствам для спасения жизни людей (туристов, альпинистов, терпящих бедствие на море, катапультировавшихся с летательных аппаратов и пр.) и может быть использовано для поиска и спасения этих людей в сложных условиях - горно-лесистой местности, низкой облачности, тумане и при отсутствии у этих людей возможности определения своих координат, а также в условиях отсутствия прямой связи (радиосвязи) со спасателями.
Известен способ обнаружения потерпевшего и точной доставки полезного груза для него при проведении поисково-спасательных операций, включающий запуск беспилотного летательного аппарата (БПЛА) для выхода в район бедствия, при этом БПЛА является возвращаемым и снабжен ретранслятором сигналов радиокомандной линии управления плюс бортовым («вторичным») летательным аппаратом, который является грузовым и который наводят на место нахождения потерпевшего и выбрасывают к потерпевшему полезный груз, с использованием анализа изображения с телевизионной камеры, размещенной на аппарате-носителе [1. Патент 2223803, Российская Федерация, МПК А62В 37/00, G08B 25/00. Способ обнаружения потерпевшего и точной доставки полезного груза для него при проведении поисково-спасательных операций / Кирюшин И.Г. заявл. 25.10.2002; опубл. 20.02.2004].
Недостатками способа являются, во-первых, наличие дополнительного летательного аппарата-носителя полезного груза, который уменьшает полезную массу основного БПЛА, во-вторых, повышенные энергозатраты на взлет и уменьшенная дальность полета и, в-третьих, требует дополнительной системы управления, что влечет численное увеличение обслуживающего персонала.
Кроме того, поиск пострадавшего осуществляют только на открытой (видимой, прозрачной) поверхности, при этом оператор командного пункта по изображению на мониторе, получаемом по радиолинии, видя изображение местности, начинает управлять полетом. После появления изображения потерпевшего в зоне обзора телекамеры оператор осуществляет разворот и новый заход возвращаемого дистанционно-пилотируемого БПЛА на потерпевшего с расстояния, необходимого для наведения бортового, «вторичного» носителя полезной нагрузки, изображение с которой передается оператору на монитор.
Такой способ поиска обладает низкой производительностью, связанной как со сложностью выделения слабоконтрастного объекта на сложном фоне, так и с утомляемостью зрительного анализатора оператора при продолжительной работе.
Известен способ проведения аварийно-спасательных работ в море для поиска и спасения людей в сложных гидрометеорологических условиях, а также в условиях отсутствия прямой связи со спасателями [2. Патент РФ №2421370, Российская Федерация, МПК (2006.01) В63С 9/00, В64С 9/02, G01S 5/18 (2006.01) А62В 99/00 (2009.01). Способ проведения аварийно-спасательных работ в море / Штрамбранд В.И., Степанюк И.А., Бацких Ю.М., Буянов С.И.; заявл 03.12.2008, Опубл. 20.06.2011, Бюл. №17].
В этом способе в предполагаемую зону бедствия направляют летательный аппарат, определяют местонахождение терпящих бедствие людей и производят спасательные работы, при этом предварительно туда же направляют БПЛА вертолетного типа, осуществляя поиск терпящих бедствие людей пассивным сканированием акватории в различных спектральных диапазонах длин волн, преимущественно в инфракрасном и сантиметровом диапазонах, при этом полет производят в управляемом режиме, а после обнаружения терпящих бедствие людей переводят БПЛА в режим зависания, отслеживая их перемещение и периодически определяя свои координаты, а спасательные средства направляют по этим координатам.
Недостатком способа является отсутствие априорной информации о пострадавших, их координатах и состоянии, что существенно увеличивает продолжительность поиска.
Известен способ проведения поисково-спасательных работ, который включает введение перед запуском БПЛА координат границ поиска, высоту полета, направление и шаг сканирования. БПЛА, оборудованный ГЛОНАС, производит поиск, сканируя территорию при помощи сверхширокополосного радара (СШПР), при этом рассчитывают расстояние между БПЛА и обнаруженным пострадавшим, определяют его физическое состояние, устанавливают уровень углекислого газа в атмосфере с помощью газоанализатора. По изображению с инфракрасной видеокамеры определяют источники огня и повышенной температурной опасности. С помощью лазерного 3D сканера определяют местонахождение препятствий, которые необходимо облететь. Данные со всех детектирующих устройств поступают в микрокомпьютер БПЛА и на пульт оператора. При обнаружении человека в области сканирования на пульт оператора подают сигнал и с помощью БПЛА доставляют полезный груз (средства индивидуальной защиты, медикаменты, мобильный телефон) [3. Патент РФ №2622505 Российская Федерация, МПК (2009.01) А62В 99/00, В64С 39/02. Способ проведения поисково-спасательных работ / Богданов П.В., Захаров Д.Ю., Шутов Д.А., Иванов А.Н. Заявл: 26.05.2016, Опубл.: 16.06.2017, Бюл. №17].
Недостатком способа является то что при отсутствии априорной информации об объекте поиска время проведения поиска будет весьма значительным, кроме того применение СШПР при обнаружении пострадавших требует высокоточной системы стабилизации полета БПЛА. Это вызвано тем, что СШПР при поиске пострадавших в качестве признака использует наличие функции дыхания, биений сердца и других физиологических признаков. Амплитуда этих колебаний мала, а следовательно, нестабильности полета БПЛА существенно снизят вероятность поиска.
Наиболее близким аналогом (прототипом) к заявляемому способу по назначению и совокупности существенных признаков является способ проведения поисковых и спасательных операций, в котором используют специализированный БПЛА и который содержит встроенный микропроцессор и соединенные с ним встроенные модуль определения пространственных координат и модуль связи, при этом корпус БПЛА имеет разъемы, обеспечивающие возможность зарядки его аккумуляторов, и выполнен с возможностью одновременной фиксации и подключения к микропроцессору видеокамеры высокого разрешения, инфракрасной камеры ночного видения, неохлаждаемой тепловизионной камеры, аудиорегистратора направленного действия, сканирующего лидара, модуля обнаружения сигнала сотового телефона, модуля обнаружения пассивного радиочастотного маячка, модуля обнаружения активного лавинного биппера, подповерхностного радиолокатора и биорадиолокатора [4. Патент РФ №181691 Российская Федерация, МПК (2006.01) В64С 39/02. Беспилотный летательный аппарат для поисковых и спасательных операций / Русский А.В., Алёхин М.Д., Богомолов А.В. Заявл: 04.10.2017, Опубл.: 26.07.2018, Бюл. №21].
Недостатком предложенного решения является то, что наличие видеокамеры высокого разрешения, инфракрасной камеры ночного видения, неохлаждаемой тепловизионной камеры, аудиорегистратора направленного действия, сканирующего лидара, модуля обнаружения сигнала сотового телефона, модуля обнаружения пассивного радиочастотного маячка, модуля обнаружения активного лавинного биппера, подповерхностного радиолокатора и биорадиолокатора подразумевает как техническую сложность устройства, его дороговизну, высокие эксплуатационные расходы, а также применение БПЛА, обладающего большими массогабаритными характеристиками, что вызывает определенные сложности в эксплуатации.
Проблема (задача), на решение которой направлен заявляемый способ (изобретение), состоит в необходимости повышения эффективности поиска и спасения терпящих бедствие людей (туристов, альпинистов, терпящих бедствие на море, катапультировавшихся с летательных аппаратов) в сложных условиях - горно-лесистой местности, низкой облачности, тумане и при отсутствии у этих людей возможности определения своих координат, а также в условиях отсутствия прямой связи (радиосвязи) со спасателями.
Решение обозначенной проблемы (задачи) достигается тем, что в способе проведения поисково-спасательных работ, заключающимся в запуске по меньшей мере одного возвращаемого беспилотного летательного аппарата (БПЛА) для выхода в район бедствия, наведении БПЛА, оснащенного системой спутниковой навигации, например ГЛОНАС/GPS, телевизионной камерой, с полезным грузом на место нахождения объекта поиска и доставки (в частности, сбрасывании) упомянутого полезного груза к объекту поиска, при этом полетом БПЛА управляют с помощью радиокомандной линии управления, посредством анализа телевизионного изображения взаимного расположения БПЛА, несущего полезный груз, и объекта поиска, а после доставки полезного груза, по командам с командного пункта, осуществляют возврат указанного БПЛА, а также упреждающе по команде на пульт оператора или по возвращении указанного БПЛА, другим летательным аппаратом или повторным рейсом вернувшегося БПЛА, осуществляют доставку, с возможностью посадки, объекту поиска дополнительного полезного груза, включающего, например, воду, провиант, одежду, средства индивидуальной защиты, радиосвязи с поисковым отрядом и медикаменты для оказания первой медицинской помощи, согласно заявляемому изобретению, обеспечивают оснащение потенциального объекта поиска перед его выходом на маршрут блоком аварийной связи, формирующим сигнал тревоги путем нажатия объектом поиска тревожной кнопки с последующими передачей голосового сообщения, информацией об отсутствии признака движения, наличии изменений показателей пульса и давления, характерных для эректильной или торпидной фаз травматического шока, отсутствии сообщений по каналу связи от модуля аварийной связи в течение заданного времени; наличии сигналов от блока акселерометров, характерных падению объекта поиска с критической высоты, передачи координат и состояния объекта поиска на наземный пункт управления или БПЛА посредством различных радиосетей, например GSM-сети, спутниковой связи, БПЛА-ретранслятора вертолетного типа для расширения зоны радиосвязи, перед запуском БПЛА автоматически рассчитывают оптимальный маршрут в точку местоположения объекта поиска, определяют координаты центра зоны допоиска, размер зоны допоиска, способ организации поиска, после запуска БПЛА корректируют его маршрут, после чего БПЛА производит поисковую деятельность видео- и инфракрасными бортовыми системами в зоне допоиска, а после обнаружения объекта поиска и анализа его состояния оператором последний принимает решение на запуск грузового летательного аппарата вертолетного типа с целью доставки средств спасания, в частности упомянутого дополнительного груза, и/или спасателей, а также сообщения в службы спасения.
Указанная проблема (задача) решается также за счет дополнительных совокупностей признаков (в рамках сформулированной в предыдущем абзаце основной совокупностью существенных признаков):
- при наличии надувного поискового ориентира, имеющего яркую окраску, оснащенного лазерным источником когерентного излучения для темного времени суток, радиомаяком и входящего в состав блока аварийной связи, объект поиска может инициировать его включение и, по поднятии надувного поискового ориентира на заданную высоту, фиксировать его положение, закрепляя концом гибкой привязи-«поводка» на каком-либо стационарном объекте, или транспортировать его при собственном перемещении (это существенно повышает благоприятный исход поисково-спасательной операции, особенно в лесистой и горной местности);
- по результатам анализа информации, поступившей от блока и согласно которой имеет место множественный объект поиска, то есть несколько объектов поиска, с различной степенью поражения, могут определять выбор приоритетных направлений поиска, тем самым ранжировано разнося решение проблемы спасения во времени (этим оптимизируют поиск и спасение, исключая неоправданное распыление сил и средств, неоправданные потери времени и, главное - минимизируют число вероятных жертв бедствия);
- БПЛА может быть оснащен усилителем (репитером) GSM сигнала, с возможностью входа в сотовую связь с объектом поиска при наличии у последнего сотового телефона (такая связь, установление которой зависит от определенных условий, существенно дополнительно увеличит вероятность обнаружения объекта поиска);
- периодически могут сбрасывать с БПЛА сигнальные маяки, оснащенные дымами и имеющие в своем составе систему спутниковой навигации и радиопередатчик, с возможностью передачи координат объекта поиска при нажатии на тревожную кнопку такого маяка (это дополнительно повышает вероятность обнаружения объектов поиска);
- для поиска могут привлекать несколько БПЛА, каждый из которых производит поиск в назначенной зоне заданной конфигурации (таким «распределением обязанностей» достигается положительный эффект, свойственный так называемым в робототехнике «мультиагентным системам», а именно - сокращения времени поиска объекта);
- при предыдущей совокупности признаков, могут назначать различные конфигурации зон поиска для каждого БПЛА в отдельности (это особенно эффективно при использовании специализированных, точнее - неодинаково специализированных, что также характерно для «мультиагентных систем», БПЛА).
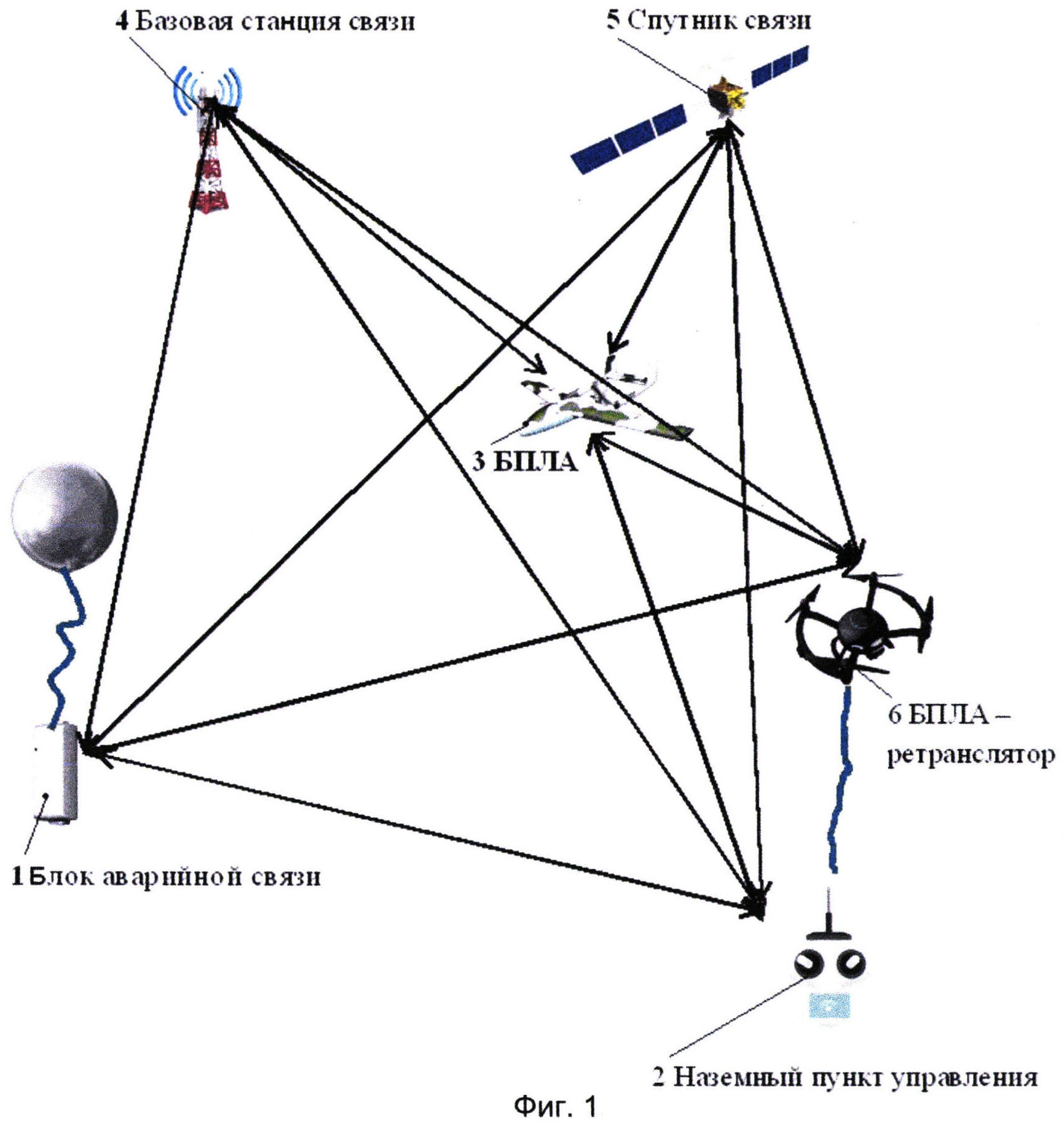
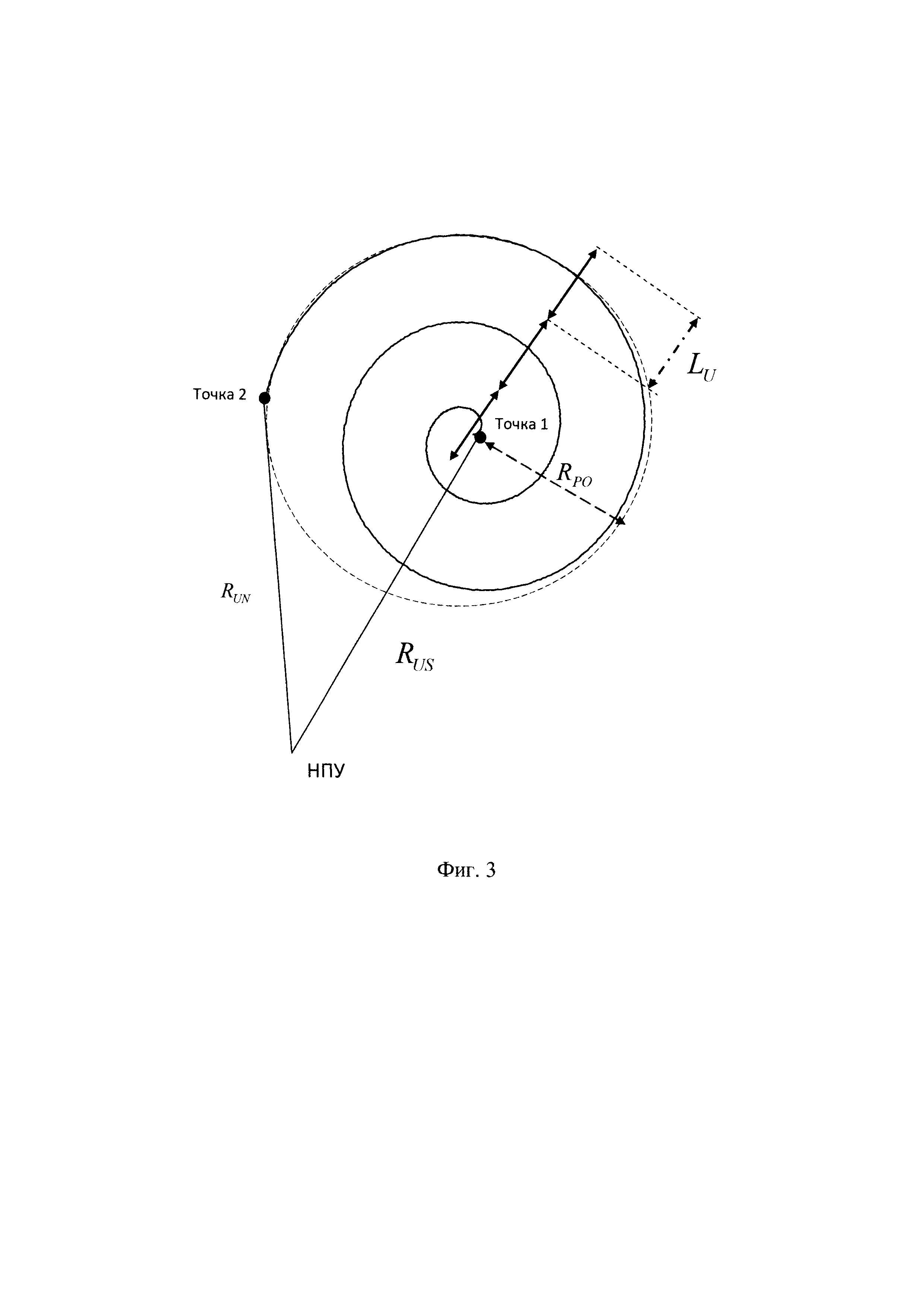
Заявляемое изобретение поясняется чертежами, где на фиг. 1 показана организация системы связи объекта поиска с БПЛА и наземным пунктом управления (НПУ), на фиг. 2 - алгоритм (блок-схема заявляемого способа) проведения поисково-спасательной операции; на фиг. 3 - схема поиска по спирали; на фиг. 4 - схема поиска группой БПЛА; на фиг. 5 - схема прямого наведения.
На фиг. 1 позициями обозначены:
1 - блок аварийной связи (БАС); 2 - наземный пункт управления (НПУ); 3 - поисковый («первичный» беспилотный летательный аппарат (БПЛА), как правило, самолетного типа; 4 - базовая станция сотовой связи; 5 - спутник связи; 6 - грузовой («вторичный») поисковый беспилотный летательный аппарат (БПЛА), как правило, большегрузный вертолетного типа.
В качестве возвращаемого БПЛА 3 используют аппарат самолетного типа, а в качестве грузового средства (доставки вторичного полезного груза для ОП) используют большегрузный летательный аппарат 6 (в частности, тоже БПЛА) вертолетного типа (см. фиг. 1).
Проведение поисково-спасательной операции начинают с анализа данных, поступающих с блока аварийной связи (БАС) 1 (см. фиг. 1), который состоит из модуля аварийной связи (см. нижнюю часть изображения БАС 1 в прямоугольном корпусе) и надувного поискового ориентира (НПО - см. верхнюю часть изображения БАС 1 в виде надувного зонда на гибкой привязи), причем модуль аварийной связи содержит приемник СНС, измеритель пульса, измеритель температуры и давления и блок акселерометров, «тревожную кнопку» и систему голосового сообщения.
При выполнении критерия «начало поиска», под которым понимают выполнение одного из следующих действий (событий) с объектом поиска (ОП, в аналогах называемого «пострадавший»):
1. Нажатие тревожной кнопки пользователем-ОП;
2. Передача голосового сообщения пользователем-ОП;
3. Отсутствие признака движения, наличие изменений показателей пульса и давления, характерных для эректильной или торпидной фазам травматического шока;
4. Отсутствие сообщений по радиоканалу связи от модуля аварийной связи в течение заданного времени;
5. Наличие от блока акселерометров сигналов, характерных падению ОП с критической высоты.
При возможности, ОП инициирует включение надувного поискового ориентира (НПО - см. упомянутую верхнюю часть БАС 1 на фиг. 1), предпочтительно входящего в состав БАС 1, причем НПО имеет яркую окраску и, поднявшись на заданную высоту (при контроле со стороны ОП посредством гибкой привязи-«поводка», служит дополнительным ориентиром для поиска с БПЛА 3 и БПЛА 6.
Для темного времени суток НПО оснащают лазерным источником когерентного излучения и в такой комплектации он служит дополнительным ориентиром для поиска с БПЛА 3 и БПЛА 6.
Координаты ОП через заданный интервал времени передают в эфир и принимают аппаратурой связи НПУ 2, БПЛА 3, 6 в режиме «точка-точка» (радионаправление или посредством ретрансляции через систему базовых станций формата GSM, или спутниковой системы связи) - см. фиг. 1.
Варианты организации радиосвязи могут быть следующие (см. фиг. 1):
1-2-3 (БАС - НПУ - БПЛА);
1-4-2-3 (БАС - базовая станция сотовой связи - НПУ - БПЛА);
1-4-2-3 (БАС - базовая станция сотовой связи - НПУ - БПЛА);
1-5-2-3 (БАС - спутник связи - НПУ - БПЛА);
1 - 3 (БАС - БПЛА);
1-4-3 (БАС - базовая станция сотовой связи - БПЛА);
1 - 4 - 2 - 3 (БАС - базовая станция сотовой связи - НПУ - БПЛА);
1-5-3 (БАС - спутник связи - БПЛА);
1-6-3 (БАС - БПЛА - ретранслятор - БПЛА);
1 - 4 - 6 - 3 (БАС - базовая станция сотовой связи - БПЛА - ретранслятор -БПЛА);
1 - 4- 2- 6- 3 (БАС - базовая станция сотовой связи - БПЛА - ретранслятор -НПУ-БПЛА);
1 - 5 - 6 - 3 (БАС - спутник связи - БПЛА - ретранслятор - БПЛА).
БПЛА 3 (6) может быть оснащен усилителем (репитером) GSM сигнала, с возможностью входа в сотовую связь с ОП при наличии у последнего сотового телефона.
Периодически могут сбрасывать с БПЛА 3 сигнальные маяки, оснащенные дымами и имеющие в своем составе систему спутниковой навигации и радиопередатчик, с возможностью передачи координат ОП при нажатии на тревожную кнопку такого маяка.
Для поиска могут привлекать несколько БПЛА 3, каждый из которых производит поиск в назначенной зоне заданной конфигурации.
При этом могут назначать различные конфигурации зон поиска для каждого БПЛА 3 в отдельности.
Постоянный прием информации от БАС 1 через определенные промежутки времени (с заданной и оперативно изменяемой при необходимости, в зависимости от ситуации, скважностью) позволяет построить маршрут ОП и контролировать его на НПУ 2, а при пропадании сигнала оценить местоположение.
При принятии решения на старт БПЛА 3, 6 оператор НПУ 2 выбирает режим управления - ручной или автоматический (см. фиг. 2). В случае автоматического управления формируется оптимальная траектория полета БПЛА 3, 6, границы зоны допоиска, режим допоиска, при полете БПЛА 3, 6 производится при необходимости корректировка маршрута, при выходе в расчетную зону допоиска осуществляют поиск ОП посредством анализа изображений видеокамерой и ИК-камерой. При обнаружении ОП или НПО результаты поиска поступают в микрокомпьютер, установленный в составе БПЛА 3. Одновременно, посредством радиоретранслятора, они передаются на НПУ 2, и оператор принимает решение на запуск БПЛА 6, доставляющего для ОП дополнительный полезный груз (воду, провиант, одежду, средства индивидуальной защиты, радиосвязи с поисковым отрядом и медикаменты для оказания первой медицинской помощи и т.д.).
Координаты БПЛА 3, 6 и НПУ 2 определяются по данным спутниковых навигационных систем ГЛОНАСС/GPS.
В ручном режиме управления БПЛА 3, 6 оператор самостоятельно управляет БПЛА 3 с НПУ 2, анализируя данные с видеокамеры и ИК-камеры, поступающие с аппарата 3 по радиолинии. После обнаружения ОП, на пульте оператора определяются координаты, сообщаются спасательной группе координаты нахождения ОП и принимают решение на запуск БПЛА 6, доставляющего к ОП упомянутую полезную нагрузку.
Перед взлетом БПЛА и в процессе полета проводят(ся) следующие операции:
- определяется дальность до ОП относительно НПУ 2 (точки старта БПЛА 3 (6)) (см. фиг. 3):

где XS, YS, HS - координаты объекта поиска полученные по данным радиотехнической системы (GPS - трекера);
XU, YU, HU - координаты БПЛА 3 (6),
то есть, по сути, по формуле (1) рассчитывается дальность от НПУ 2 до начала предполагаемой точки поиска (точка 1) - см. фиг. 3;
- производится оценка ожидаемого значения подлетного времени до предполагаемого центра зоны поиска:

где VU - средняя скорость полета БПЛА 3 (6);
- определяется ожидаемый радиус зоны поиска в точке с последними известными (предполагаемыми) координатами ОП XS, YS:

где  - среднеквадратические ошибки (СКО) определения местоположения ОП по данным спутниковой навигационной системы, получаемые с БАС 1 и равные
- среднеквадратические ошибки (СКО) определения местоположения ОП по данным спутниковой навигационной системы, получаемые с БАС 1 и равные
где: σUX, σUY - СКО определения прямоугольных координат ОП по данным спутниковой навигационной системы с БАС 1; - СКО определения местоположения БПЛА 3 (6) по данным спутниковой навигационной системы, равные
где: σSX, σSY - СКО определения прямоугольных координат ОП по данным спутниковой навигационной системы; VS - средняя скорость перемещения ОП в ожидаемых условиях поиска; TΣ=tПОДГ+TP - суммарное время принятия решения на проведение поиска и полет БПЛА 3 (6) в зоне поиска; tПОДГ - время на принятие решения на проведение поиска и подготовку сил и средств к поиску;
- при подлете БПЛА 3 (6) к точке с координатами ОП, полученными по данным радиотехнической системы (GPS - трекера), осуществляется процедура поиска ОП по результатам анализа изображения, сформированного оптико-электронной системой (ОЭС), БПЛА 3 (6) - в роли ОЭС может использоваться видеокамера, при этом поиск может осуществляться по различным траекториям, например по Архимедовой спирали (см. фиг. 3), при этом уравнение Архимедовой спирали в полярных координатах имеет вид ρ=kϕ, где k - сдвиг точки при ее движении по лучу при повороте на угол, равный одному радиану, повороту прямой на угол 2π соответствует сдвиг LU=2kπ, где LU - шаг спирали, тогда уравнение Архимедовой спирали  а ширина полосы наблюдения (шаг Архимедовой спирали) определяется из геометрических соображений по формуле LU=2HUtg(0.5α), где α - угол поля зрения оптико-электронного прибора;
а ширина полосы наблюдения (шаг Архимедовой спирали) определяется из геометрических соображений по формуле LU=2HUtg(0.5α), где α - угол поля зрения оптико-электронного прибора;
- перед проведением поиска рассчитывается число витков Архимедовой спирали  соответствующих ожидаемому радиусу поиска:
соответствующих ожидаемому радиусу поиска: 
- рассчитывается длина дуги Архимедовой спирали:

[5.. Выгодский М.Я. Справочник по высшей математике. М.: ACT: Астрель, 2006. - 991 с. - С. 895];
- рассчитывается время полета при поиске БПЛА 3 (6) при полете по Архимедовой спирали:

- учитывая, что при поиске объекта по данным видеокамеры программное обеспечение может сформировать ложные тревоги с вероятностью DL, т.е. принять некий обнаруженный объект, не относящийся к ОП, за таковой, и что при этом оператору НПУ 2 по радиолинии передаются координаты предполагаемого ОП и видеоизображение (фотоизображение) участка местности, оператор НПУ 2 при необходимости и для достоверного принятия решения формирует команду на барражирование в этом районе БПЛА 3 с постоянным радиусом RBU, время полета в этой зоне поиска определяется по формуле:
- при среднем количестве ложных обнаружений KL≈DLNLO, где NLO - количество объектов, принятых алгоритмом распознавания за ОП, суммарный временной баланс составит величину

где nL - среднее количество облетов зоны радиуса RBU, необходимых оператору для принятия решения о типе объекта,
рассчитывается среднее время возвращения БПЛА 3 из зоны поиска к НПУ 2 или к площадке посадки БПЛА 3 по формуле:

где

XN, YN, HN - координаты НПУ 2 или площадки, выбранной для посадки;
XU, YU, HU - координаты БПЛА 3,
тот есть, по сути, по формуле (8) рассчитывается дальность от БПЛА 3 в предполагаемый момент окончания поиска (точка 2 на фиг. 3) до НПУ 2.
Если по формулам (2), (5), (6) и (7) суммарный временной баланс превышает полетное время БПЛА 3, заложенное по техническим требованиям, или время поиска превышает время, в течении которого в организме ОП не наступили необратимые изменения, или за это время возможно изменение климатических условий в худшую сторону, что существенно затруднит поиск, то для процедуры поиска могут привлекать два и более БПЛА 3, при этом зона радиуса (3), аппроксимируется квадратом, который подразделяется на М зон поиска шириной LM, в которых БПЛА 3 производят операции поиска (см. фиг. 4).
Так, в качестве примера для трех БПЛА 3 на фиг. 4 точками 1, 2 и 3 обозначены точки входа БПЛА 3 (1, 2 и 3 соответственно) в зону поиска, а цифрами 2, 3 и 4 точки выхода БПЛА (1, 2 и 3 соответственно) из зоны поиска.
Зону поиска аппроксимируется квадратом со стороной  (фиг. 4), при этом суммарный путь проходимый одним БПЛА 3, определяется как
(фиг. 4), при этом суммарный путь проходимый одним БПЛА 3, определяется как

где RR - радиус разворота БПЛА 3, NK - количество зон шириной LU, равное целому числу от отношения  . В свою очередь,
. В свою очередь,  , где
, где  - количество БПЛА 3, привлекаемых для поиска. Время поиска в соответствующих выделенных зонах равно:
- количество БПЛА 3, привлекаемых для поиска. Время поиска в соответствующих выделенных зонах равно:  .
.
Применение такого способа существенно сокращает время поиска.
При этом БПЛА 3, как уже было сказано выше, образуют мультиагентную группу, обмениваются между собой информацией по радиоканалу, как о своем местоположении, так и о результатах поиска.
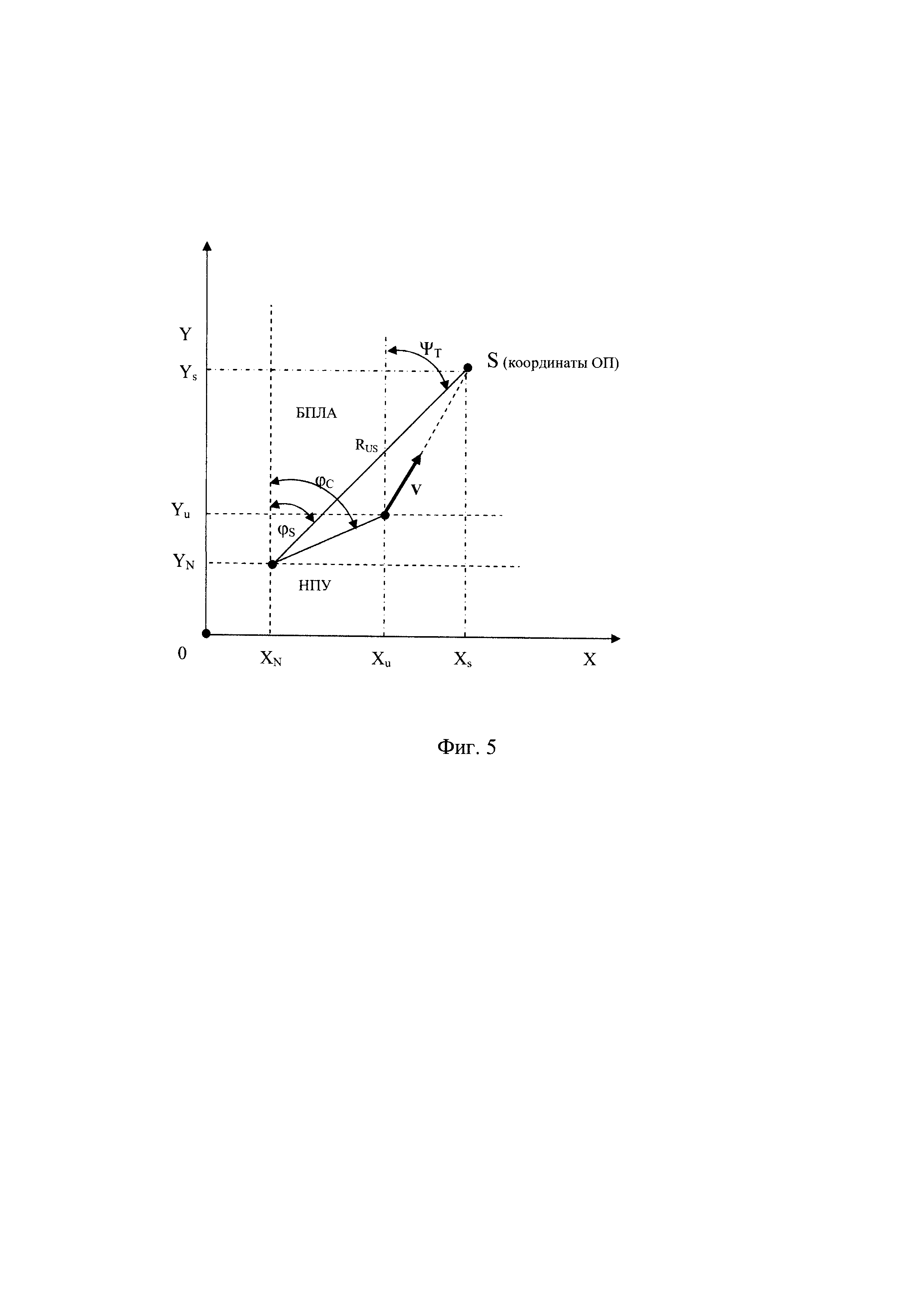
Наведение БПЛА 3 в точку с координатами XS, YS может осуществляться по методу прямого наведения [6. Верба В.С. Авиационные комплексы радиолокационного дозора и наведения. Состояние и тенденции развития. М.: Радиотехника, 2008. 432 с. - С. 238].
Суть этого метода состоит в том, что продольная ось наводимого БПЛА 3 должна все время совмещаться с направлением на цель. В такой ситуации требуемый курс должен формироваться по правилу (фиг. 5):
где ψT - требуемое значение курса в текущий момент времени.
Таким образом, использование заявляемого способа позволяет уменьшить продолжительность и улучшить качество поисково-спасательных работ, а значит - повысить эффективность поиска и спасения терпящих бедствие людей (туристов, альпинистов, терпящих бедствие на море, катапультировавшихся с летательных аппаратов) в сложных условиях - горно-лесистой местности, низкой облачности, тумане и при отсутствии у этих людей возможности определения своих координат, а также в условиях отсутствия прямой связи (радиосвязи) со спасателями.
Всенаправленная антенна излучения
Устройство для определения параметров движения цели
Способ определения координат цели в трехпозиционной дальномерной радиолоокационной системе
Устройство для образования скважин в грунте ударным способом
Устройство для определения параметров движения цели
Многопозиционная система посадки воздушных судов
Способ определения местоположения сканирующей рлс пассивным многолучевым пеленгатором
Электронный медицинский стетоскоп
Привод транспортного средства с двухпоточным бесступенчатым механизмом передач и поворота
Шарообразный робот (варианты)

