Результат интеллектуальной деятельности: Многопозиционная система посадки воздушных судов
Вид РИД
Изобретение
Изобретение относится к авиации, в частности к многопозиционным системам посадки воздушных судов (ВС) в условиях сложного рельефа местности.
Известна система посадки воздушных судов [см. 1: патент США №6469654, Transponder landing system. МПК: G01S 13/76; G01S 13/91; G01S 3/46, опубл. 22.10. 2002], так называемая транспондерная система TLS. Система посадки TLS, в первую очередь, предназначена для установки там, где трудно обеспечить требуемые точности приземления ВС по условиям рельефа местности в районе аэродрома. При этом система TLS использует стандартное бортовое оборудование ВС, что является достоинством данной системы посадки. В настоящее время системы посадки TLS активно внедряются в гражданской и военной авиации США. В различных странах мира на аэродромах со сложным рельефом местности уже несколько лет эксплуатируются системы TLS.
Работа известной системы TLS основана на использовании аппаратуры вторичной радиолокации (BPЛ). При этом в районе взлетно-посадочной полосы (ВПП) устанавливают маломощный запросчик (приемо-передатчик) системы вторичной радиолокации (ВРЛ), который запрашивает воздушные суда (ВС), находящиеся в зоне посадки. По задержке прихода ответного сигнала определяют дальность, а для определения угла места и азимута применяется аппаратура, использующая фазометрический метод измерения углов. Для идентификации ВС, заходящих на посадку, диспетчер вводит в TLS бортовой номер ВС. Для обеспечения требуемой точности определения координат местоположения ВС используется сложная обработка информации с использованием калмановской нелинейной фильтрации. По координатам местоположения ВС рассчитывают его отклонение от расчетной глиссады. Рассчитанные отклонения ВС от глиссады передаются на борт по линии передачи сигналов управления (ЛПСУ) в формате сигналов системы посадки ILS, которые принимаются бортовыми приемниками курса и глиссады системы ILS и дальше передаются в систему автоматического управления (САУ) ВС или выводятся на индикацию пилоту. Таким образом, система TLS обеспечивает посадку ВС, используя при этом стандартное бортовое оборудование.
Недостатком системы посадки TLS является фазометрический способ измерения углов, который требует применения достаточно сложных антенн и аппаратуры.
Известна многопозиционная система посадки воздушных судов [см. 2: патент США №5017930. Precision landing system. МПК B64D 45/04; B64F 1/18; G01S 1/16; G01S 1/18; G01S 13/74; G01S 13/88; G01S 13/91; G01S 19/48; G01S 3/02; G01S 5/00; G01S 5/14; G08G 5/02; опубл. 21.05.1991], содержащая наземный запросчик и не менее четырех наземных приемников ответных сигналов, соединенных по выходам через сигнальную линию связи с наземной ЭВМ управления, управляющий выход которой через радиолинию управления посадкой воздушного судна соединен с бортовой аппаратурой воздушного судна, включающей бортовую аппаратуру управления воздушным судном и бортовой ответчик, соединенный через радиолинию «запрос-ответ» с наземным запросчиком, причем ЭВМ управления снабжена модулем расчета координат воздушного судна (ВС) и отклонения его от траектории посадки. При этом три приемника ответных сигналов ВС расположены перпендикулярно оси ВПП, в районе ее центра, а другие приемники расположены на продолжении оси ВПП по одному с каждой стороны захода на посадку ВС и на некотором удалении от торца ВПП. Таким образом, приемники ВРЛ на поверхности аэродрома образуют букву "Т". Местоположение всех приемников точно определено в аэродромной декартовой системе координат. Современные геодезические приборы позволяют делать привязку с точностью до единицы сантиметров. Поэтому точно известно время передачи сигналов от приемников в центральный вычислитель, которое в дальнейшем учитывается при расчете местоположения ВС.
Принцип действия данной системы заключается в следующем. Запросчик запрашивает ВС, находящиеся в зоне посадки. Все приемники и запросчик синхронизированы системой единого времени. По задержке прихода ответного сигнала определяются дальности до ВС. Так же, как и в системе TLS, по бортовому номеру осуществляется идентификация ВС, заходящих на посадку. Для определения координат местоположения ВС используется метод калмановской нелинейной фильтрации [см. 3: Балакришнан А.В. Теория фильтрации Калмана. Перевод с англ. С.М. Зуева, под ред. А.А. Новикова. - Москва: Мир, 1988. - 168 с.]. По координатам местоположения ВС рассчитывают его отклонение от заданной траектории посадки по курсу и глиссаде. Рассчитанные отклонения ВС передаются на борт по линии передачи сигналов управления (ЛПСУ) в формате сигналов системы посадки ILS, которые принимаются бортовыми приемниками курса и глиссады системы ILS и дальше передаются в бортовую систему автоматического управления (САУ) ВС или выводятся на индикацию его пилоту.
Данная система посадки имеет недостаточную надежность безопасного вывода ВС на ВПП, связанную с высокими погрешностями в определении местоположения ВС.
Это связано с тем, что особенностью системы вторичной радиолокации (ВРЛ), используемой в системах посадки ВС, является то, что при формировании ответного сигнала, например в режиме «RBS» или режиме «S», в бортовых ответчиках возникают существенные задержки, которые являются детерминированными (постоянными) для конкретного ответчика ВС. Величина задержки в пересчете на дальность может достигать 150 метров. Такие задержки неприемлемы для систем посадки, где местоположение ВС должно определяться с точностью до нескольких метров. Кроме того, здесь используется калмановская фильтрация. При этом в вектор состояния включают три координаты местоположения ВС, три скорости изменения координат местоположения ВС по соответствующим осям аэродромной системы координат (СК), а также задержку ответного сигнала ВРЛ. В теории калмановской фильтрации существует понятие "наблюдаемость", которое определяет возможность получения оценок вектора состояния по имеющимся измерениям. Для определения наблюдаемости калмановских фильтров был разработан (см. 4: Красовский А.А., Белоглазов И.Н., Чигин Г.П. Теория корреляционно-экстремальных навигационных систем. М., Наука, 1979. - 448 с.) необходимый и достаточный критерий. В соответствии с этим критерием ранг матрицы, составленной из матрицы вектора наблюдения и матриц производных вектора наблюдения, должен быть равен размерности вектора состояния синтезируемого фильтра. В данном случае вектор состояния, включающий указанную выше задержку ответного сигнала, будет не наблюдаем, т.е. калмановским методом величину задержки ответного сигнала ВРЛ определить невозможно.
Таким образом, рассматриваемая система посадки будет иметь большие погрешности в определении местоположения ВС.
Известна многопозиционная система посадки воздушных судов [см. 5: патент на изобретение РФ №2558412, МПК G01S 1/20 (2006.01), B64D 45/04 (2006.01), опубл. 10.08.2015], содержащая не менее четырех наземных приемо-передающих радиостанций с высокоточными синхронизированными часами, расположенных в точках, известных с высокой точностью и являющихся вершинами многоугольника, в центре которого расположена взлетно-посадочная полоса. Воздушные суда (ВС), заходящие на посадку, содержат приемо-передающую радиостанцию, высокоточный высотомер малых весов, задатчик траектории захода на посадку, бортовую ЭВМ, соединенную с автопилотом приводами рулей и внутрикабинными индикаторами.
Наземные приемо-передающие радиостанции, наземная ЭВМ и радиостанции, находящиеся на борту ВС, образуют сеть из линий передачи данных, причем координаты наземных радиостанций заранее известны с высокой точностью. Наземные приемо-передающие радиостанции разнесены на достаточное расстояние друг от друга и являются вершинами многоугольника, в центре которого расположена ВПП. Воздушные суда в составе бортового оборудования имеют высокоточные высотомеры малых высот, а также задатчик траектории захода на посадку и бортовую ЭВМ, соединенную с автопилотом приводами рулей и внутрикабинными индикаторами. Посылки радиостанций строго синхронизированы, привязаны к моментам единого времени и содержат данные об идентификационных номерах источников информации и поправку на задержку в радиотракте. На наземной ЭВМ по величине задержки принятого кодированного сообщения каждой наземной станцией вычисляют соответствующую псевдодальность до ВС и поправку на величину систематической задержки, решают уравнения псевдодальностей и вычисляют координаты ВС, которые передают на борт соответствующих ВС. На борту ВС по величине задержек принятых кодированных сообщений от каждой наземной станции вычисляются соответствующие псевдодальности до наземных приемо-передающих радиостанций и поправки на величину систематической задержки, решают уравнения псевдодальностей и вычисляют координаты ВС. Бортовая ЭВМ по измеренным координатам вычисляет отклонения от заданной траектории в горизонтальной и вертикальной плоскостях, формирует управляющие воздействия для корректировки указанных отклонений и передают их на автопилот для отработки приводами соответствующих рулевых поверхностей, а также для индикации на штатном бортовом командном авиагоризонте или на иных индикаторах. На заключительном этапе захода на посадку, когда ВС находится в пределах ВПП или ее продолжения, для вычисления отклонений от заданной траектории в вертикальной плоскости используются показания высокоточного радиовысотомера малых высот или лазерного высотомера, измеряющего высоту от уровня поверхности ВПП.
Многопозиционная система посадки работает следующим образом. На борту ВС, находящемся в зоне аэродрома, с помощью задатчика выставляют траекторию захода на посадку, которая может представлять собой уравнение, связывающее координаты время и такой параметр, как дальность до некоторой точки на ВПП, в качестве которой может использоваться контрольная точка аэродрома (КТА) или координаты торца ВПП. При автоматическом зависимом наблюдении в вещательном диапазоне (АЗН-В), как известно, шкалу единого времени разделяют на временные отрезки или слоты, определенное количество которых составляют кадры (фреймы) и суперкадры (суперфреймы). В заранее зарезервированных слотах радиопередатчик ВС транслирует свой идентификационный номер и другие данные, причем момент начала посылки) известен и строго фиксирован по шкале единого времени. Каждая наземная радиостанция прослушивает эфир и фиксирует момент прихода посылки от ВС. Так как моменты времени фиксированы, то определяется время запаздывания и псевдодальности от ВС до каждой из наземных приемо-передающих радиостанций.
Для вычисления неизвестных координат ВС x, y, h решают систему уравнений для m псевдодальностей. Поскольку число неизвестных координат с добавлением неизвестной величины ухода бортовых часов равно четырем, то для их отыскания количество уравнений m должно быть не менее четырех. Соответственно, количество наземных радиостанций должно быть не менее четырех.
Перед заходом на посадку с помощью задатчика устанавливают одну из возможных траекторий захода на посадку, которая удовлетворяет требованиям безопасного пролета препятствий в районе аэродрома. Бортовая ЭВМ по измеренным координатам вычисляет отклонения от заданной траектории в горизонтальной и вертикальной плоскостях, формирует управляющие воздействия для корректировки указанных отклонений и передает их на автопилот для отработки приводами соответствующих рулевых поверхностей, а также для индикации на штатном бортовом командном авиагоризонте или на иных индикаторах.
Недостатками данной системы является то, что существующие системы ADS-B при получении данных о местоположении и скорости полагаются исключительно на данные спутниковых навигационных систем (СНС). Поэтому возможны отказы в случаях, когда уровень характеристик или геометрия спутниковой группировки недостаточны для поддержки того или иного вида применения.
Протокол передачи данных ADS-B не защищен от хакерских атак, что может привести к созданию злоумышленниками искажений воздушной обстановки. Ряд специалистов считают, что сигналы ADS-B могут быть легко перехвачены и подделаны хакерами. При взломе сигнала злоумышленники могут вывести на бортовой радар несуществующий объект, например еще один самолет, и заставить пилотов выполнить ненужный или опасный маневр (см. 6: http://andreicostin.com/papers/xakep.ru_2013_01_COVERSTORY.pdf)
Кроме того, координаты воздушного судна передаются с борта по линии связи, а следовательно, нет возможности проверить, что то, что получено по линии связи, - это действительно реальные координаты объекта. Одна автономная наземная ADS-B не в состоянии проверить, что они вообще получены от требуемого воздушного судна, а не от другого источника.
Причина этих трудностей состоит в уязвимости сигналов СНС, к числу которых обычно относят: сбои в работе СНС, сознательное ограничение функционирования СНС оператором; необнаруженная неисправность бортовой навигационной системы; непреднамеренные помехи близкими по частотам сигналами; глушение и подмена сигналов СНС; подмена сигналов ADS-B.
Ближайшим аналогом (прототипом) изобретения является многопозиционная система посадки воздушных судов [см. 7: патент на изобретение РФ N 2489325, МПК B64D 45/04; B64F 1/18; G01S 1/16; G01S 1/18; G01S 13/74; G01S 13/88; G01S 13/91; G01S 19/48; G01S 3/02; G01S 5/00; G01S 5/14; G08G 5/02; опубл. 10.08.2013], содержащая наземный запросчик и не менее трех наземных приемников ответных сигналов, соединенных по выходам через сигнальную линию связи с наземной ЭВМ управления, управляющий выход которой через радиолинию управления посадкой воздушного судна соединен с бортовой аппаратурой воздушного судна, включающей бортовую аппаратуру управления воздушным судном, бортовой ответчик, соединенный через радиолинию «запрос-ответ» с наземным запросчиком, бортовой измеритель высоты воздушного судна, соединенный по выходу с бортовым ответчиком, причем наземная ЭВМ управления снабжена модулем расчета координат воздушного судна и отклонения его от траектории посадки, а модуль расчета координат воздушного судна и отклонения его от траектории посадки выполнен с учетом измерений высоты полета воздушного судна и разности дальностей до воздушного судна относительно местоположений запросчика и приемников ответных сигналов. При этом два наземных приемника ответных сигналов установлены по бокам от осевой линии взлетно-посадочной полосы в районе ее центра со смещением от осевой линии не менее чем на пятьсот метров, а последующие приемники - по одному с каждой стороны захода воздушного судна на посадку и на расстоянии, не меньшем четырехсот метров от торца взлетно-посадочной полосы.
Структурная схема прототипа приведена на фиг. 1.
Бортовой измеритель высоты воздушного судна содержит барометрический, радио- и/или лазерный высотомер. Линия связи наземных приемников ответных сигналов с наземным вычислителем местоположения воздушного судна выполнена оптоволоконной и/или радиолинией связи типа «WiMax». Радиолиния управления посадкой воздушного судна выполнена в виде двунаправленной радиолинии обмена данными «борт-земля» или однонаправленной радиолинии передачи сигналов управления с наземной ЭВМ управления на борт воздушного судна.
Многопозиционная система посадки воздушных судов работает следующим образом. В запросчике 1 формируется запросный сигнал, который излучается в секторе захода ВС 5 на посадку. После получения запросного сигнала в бортовом ответчике 11 формируется и излучается ответный сигнал с данными о высоте полета ВС 5, полученными с выхода измерителя 12 высоты ВС 5, например, с барометрического высотомера. Ответный сигнал принимается приемниками 6 многопозиционной системы посадки. Ответный сигнал с выхода приемников 6 передается по линиям связи 7 на вход ЭВМ 8. В ЭВМ 8 фиксируют время прихода сигнала с каждого приемника 6. Зная расстояние между приемниками 6, ЭВМ 8 определяет время прихода сигналов в эти приемники 6. Уравнение дальности для распространения сигнала с момента запроса и до получения ответного сигнала i-м приемником 6 определяется следующим выражением:
 ,
,
где:
di - дальность от ВС 5 до i-го приемника 6;
d0 - дальность от запросчика до ВС 5;
xi, yi, zi - координаты приемников 6 ответных сигналов;
хз, yз, zз - координаты запросчика 1;
x, у, z - координаты ВС 5;
τ - задержка ответного сигнала в бортовом ответчике 11;
с - скорость света.
Как видно из приведенной формулы, в каждый временной отрезок входит задержка ответчика τ. Для определения местоположения ВС 5, а также исключения влияния задержки ответчика, можно воспользоваться известным разностно-дальномерным методом. Определив разность дальностей между различными парами приемников 6 ЭВМ 7 решает систему трех уравнений с тремя неизвестными, в которой отсутствует задержка бортового ответчика 11 и дальность от запросчика 1 до ВС 5. Разностно-дальномерные уравнения в ЭВМ 8 представлены в следующем виде:



где:
τ12=t1-t2, τ13=t1-t3, τ43=t4-t3,
t1, t2, t3, t4 - время прихода ответного сигнала на соответствующий приемник 6 с момента излучения запросного сигнала,
x, y, h - координаты ВС 5.
Из рассматриваемой системы уравнений ЭВМ 8 численными методами находит координаты ВС 5 с точностью десятки-сотни метров, что недостаточно для безопасной посадки ВС 5. Для увеличения точности измеренных координат ВС 5 до единиц метров ЭВМ 8 использует далее информацию о высоте полета ВС 5, передаваемую в ответном сигнале ответчика 11. Для наихудшего случая (использование барометрического высотомера 12) точность измерения барометрической высоты составляет 15-20 метров. При этом ошибка измерения высоты ВС 5 состоит в основном из систематической составляющей ошибки, а флуктуационная составляющая ошибки измерения высоты по величине на порядок меньше. Кроме того, при передаче барометрической высоты появляется ошибка, связанная с дискретностью ее передачи. Так, в режиме «RBS» дискрет передаваемой высоты равен 30 м, т.е. среднеквадратическая ошибка передачи барометрической высоты составит 15 метров. Следовательно, суммарная ошибка определения барометрической высоты в системе посадки составит порядка 21-25 метров. Формула дальности ВС 5 с учетом ошибки определения барометрической высоты

где:
ΔНб - ошибка определения барометрической высоты.
Из последней формулы следует, что при дальности действия системы посадки до 40 км и секторе зоны посадки ±40° от оси ВПП ошибка измерения дальности ВС 5, связанная с относительно высокой ошибкой измерения барометрической высоты, составит порядка 1 метра.
Таким образом, для совмещенного запросчика 1 и приемника 6 ЭВМ 8 рассчитывает дальность до ВС 5 с использованием информации о барометрической высоте его полета. Далее из измеренной дальности между ЭВМ 8 и ВС 1 вычитается ранее рассчитанная дальность и определяется ошибка измерения дальности, связанная с задержкой τ ответного сигнала ответчика 11. Затем ЭВМ 8 вычитает ошибку измерения дальности, связанную с задержкой ответного сигнала, из соответствующих измерений дальности i-го приемника 6, и получает уточненные значения дальностей от ВС 5 до соответствующих приемников 6. Далее используя калмановскую фильтрацию [3: Балакришнан А.В. Теория фильтрации Калмана. Издательство: Мир, 1988. - 86 с.] дополнительно уменьшают влияние флуктуационных ошибок измерения дальностей, связанных с распространением сигнала и обработкой в приемниках 6. В вектор измерения ЭВМ 8 включает три дальности, а в вектор состояния включает координаты местоположения ВС 5 и параметры его движения (скорости) по осям декартовой аэродромной системы координат. В качестве модели движения ВС 5 в ЭВМ 8 принята гипотеза о его прямолинейном и равномерном движении, что хорошо согласуется с реальным движением ВС 5 по глиссаде 14. По мере приближения ВС 5 к ВПП 13 точность определения его местоположения будет увеличиваться за счет улучшения геометрии относительного расположения ВС 5 и приемников 6. Далее в ЭВМ 8 рассчитывается отклонение ВС по курсу Ек и углу места Ег от заданной глиссады 14 захода на посадку, заложенной в память ЭВМ 8 для ВПП 13 аэродрома. Угловые отклонения ВС 5 по курсу Ек и глиссаде Ег с выхода ЭВМ 8 передаются через линию 10 радиоуправления на борт ВС 5 в формате инструментальных систем посадки, например ILS, или передаются по линии обмена данными. Принятые на борту сигналы отклонения ВС 5 от траектории посадки отображаются на рабочем месте пилота и используются последним в ручном или автоматизированном режимах управлении посадкой ВС.
Данная система посадки имеет недостаточную надежность безопасного вывода ВС на ВПП, связанную с тем, что при нарушении связи ВС с наземной управляющей ЭВМ ВС лишится всей необходимой информации для выполнения посадки, а также с наличием ошибок в определении местоположения ВС, обусловленных шумовой погрешностью измерений.
Техническим результатом изобретения является повышение надежности безопасного вывода ВС на посадку за счет обеспечения ВС необходимой информацией для посадки путем определения координат ВС непосредственно на борту ВС при нарушении связи с наземной управляющей ЭВМ, а также за счет снижения погрешностей в определении местоположения ВС, что обеспечивается увеличением количества статистически независимых измерений дальномерных параметров и использованием кооперативных методов обработки информации, комплексирования измерений, полученных как на борту ВС, так и на наземном пункте.
Достижение заявленного технического результата обеспечивается в предлагаемой многопозиционной системе посадки воздушных судов, содержащей наземный передатчик-запросчик и, по меньшей мере, три наземных приемника ответных сигналов, каждый из которых подключен к соответствующей антенне, причем наземные приемники ответных сигналов подключены выходами через сигнальные линии связи к наземному модулю расчета координат воздушного судна и отклонения его от траектории посадки, входящему в наземную ЭВМ управления, управляющий выход которой через радиолинию управления посадкой воздушного судна, в состав которой входят наземный радиопередатчик и бортовая антенна, соединен с бортовой аппаратурой управления воздушного судна, входящего в состав бортовой аппаратуры воздушного судна, при этом бортовой передатчик-ответчик, входящий в бортовую аппаратуру управления воздушным судном, соединен через радиолинию «запрос-ответ» с наземным передатчиком-запросчиком, бортовой измеритель высоты воздушного судна, также входящий в бортовую аппаратуру управления воздушным судном, соединен выходом со входом бортового передатчика-ответчика, входящего в состав бортового ответчика, причем наземный модуль расчета координат воздушного судна и отклонения его от траектории посадки выполнен с возможностью учета высоты полета воздушного судна и разности дальностей до воздушного судна относительно местоположений передатчика-запросчика и приемников ответных сигналов, при этом два наземных приемника ответных сигналов установлены по бокам от осевой линии взлетно-посадочной полосы в районе ее центра со смещением от осевой линии не менее чем на пятьсот метров, и, по меньшей мере, один приемник - со стороны, противоположной заходу воздушного судна на посадку, и на расстоянии, не меньшем четырехсот метров от торца взлетно-посадочной полосы, отличающейся тем, что дополнительно содержит, по меньшей мере, два наземных передатчика, высокочастотными выходами подсоединенных к входу соответствующего из упомянутых наземных приемников, выполненных многоканальными, низкочастотный выход каждого из которых подключен к соответствующему входу наземного модуля расчета координат воздушного судна и отклонения его от траектории посадки, причем каждый из упомянутых передатчиков и соответствующий многоканальный приемник конструктивно объединены в приемо-передающий модуль, в котором вход запуска передатчика соединен с выходом канала многоканального приемника, соответствующего частоте излучения модуля, наиболее удаленного от воздушного судна, при этом наземный передатчик-запросчик связан с наземным модулем расчета координат воздушного судна двунаправленной шиной, а в бортовую аппаратуру управления воздушным судном введен бортовой модуль расчета координат воздушного судна, выполненный с возможностью расчета координат воздушного судна и отклонения его от траектории посадки, причем в бортовом ответчике воздушного судна бортовой передатчик и бортовой приемник выполнены многоканальными, и низкочастотные входы запуска многоканального бортового передатчика соединены с соответствующими выходами многоканального бортового приемника, своим высокочастотным входом связанного с высокочастотным выходом бортового многоканального передатчика, а вход блокировки работы многоканального бортового передатчика соединен с выходом бортового модуля расчета координат воздушного судна, соответствующим входом связанного с выходом бортового измерителя высоты воздушного судна.
При этом предлагаемая многопозиционная система посадки воздушных судов для обеспечения возможности захода на посадку воздушного судна с двух концов ВПП может дополнительно содержать, по меньшей мере, один наземный приемо-передающий модуль, включающий многоканальные передатчик и приемник, причем высокочастотные выход передатчика и вход приемника объединены и подключены к антенне приемо-передающего модуля, а вход запуска передатчика соединен с низкочастотным выходом канала приемника, соответствующего частоте излучения модуля, наиболее удаленного от воздушного судна, и через сигнальную линию связи - с соответствующим входом наземного модуля расчета координат воздушного судна.
Введение дополнительных передатчиков, связанных с соответствующими многоканальными приемниками в наземную аппаратуру, а также многоканальных передатчика и приемника в бортовую аппаратуру позволило организовать кооперативную обработку информации о дальностях, суммах и разностях дальностей до ВС путем увеличения количества статистически независимых измерений этих величин (см. 8: Черняк В.С. Многопозиционная радиолокация. М.: Радио и связь, 1993. - 416 с.; 9: Борисов Е.Г., Машков Г.М., Турнецкий Л.С. Повышение точности определения координат цели при реализации кооперативной обработки в многопозиционной радиолокационной системе. Радиотехника №5. - 2013.- с. 4-9).
При этом введение в бортовую аппаратуру управления воздушным судном бортового модуля расчета координат воздушного судна, выполненного с возможностью расчета координат воздушного судна и отклонения его от траектории посадки, позволило исключить зависимость возможности посадки воздушного судна от работоспособности радиолинии управления посадкой воздушного судна.
Это позволило также снизить погрешности определения местоположения воздушного судна и обеспечить повышение надежности безопасного вывода на посадку воздушного судна.
Предлагаемая многопозиционная система посадки воздушных судов поясняется чертежами, где приведены:
на фиг. 1 - структурная схема прототипа;
на фиг. 2 - пространственное расположение элементов многопозиционной системы посадки;
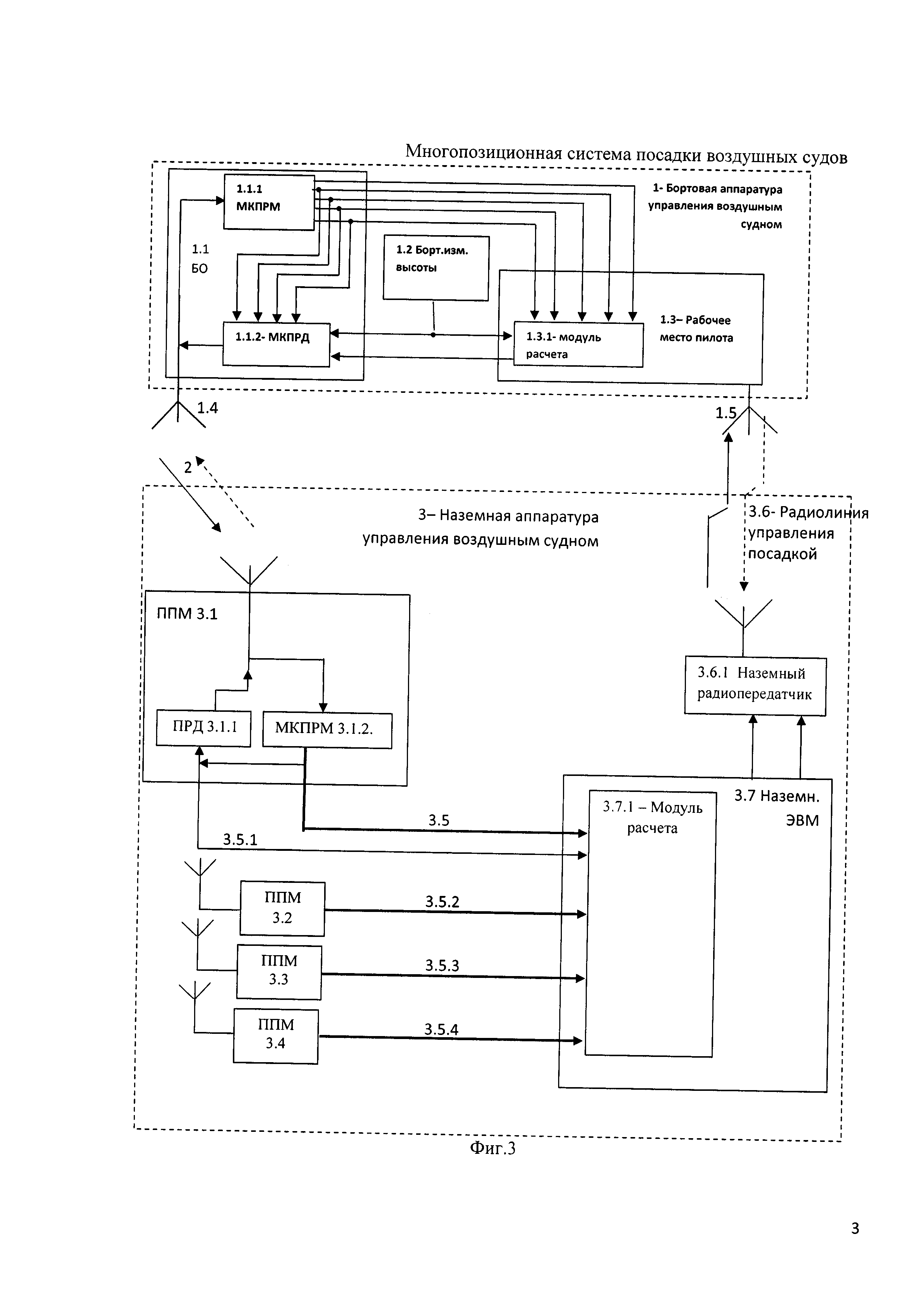
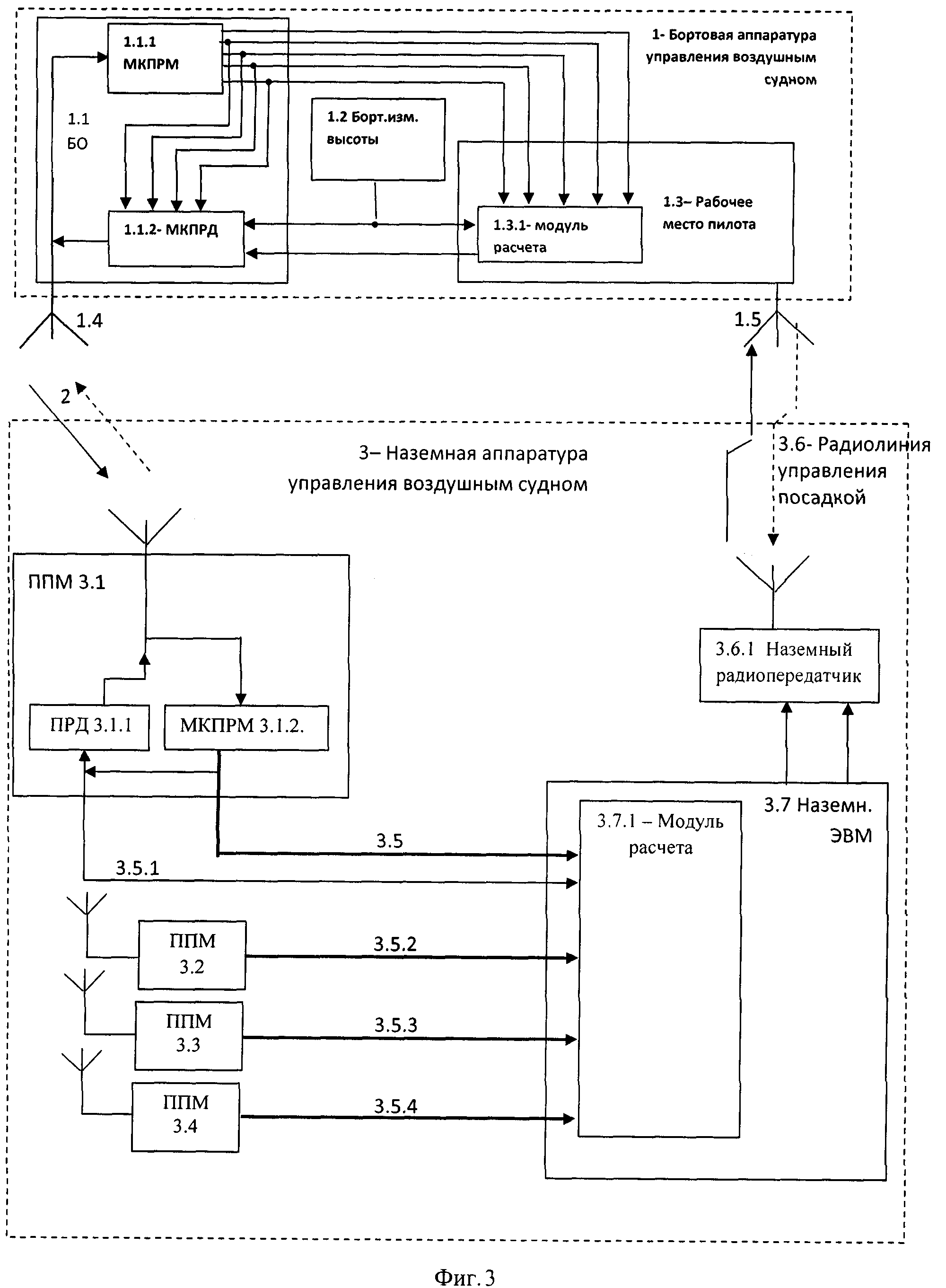
на фиг. 3 - структурная схема предлагаемой многопозиционной системы посадки;
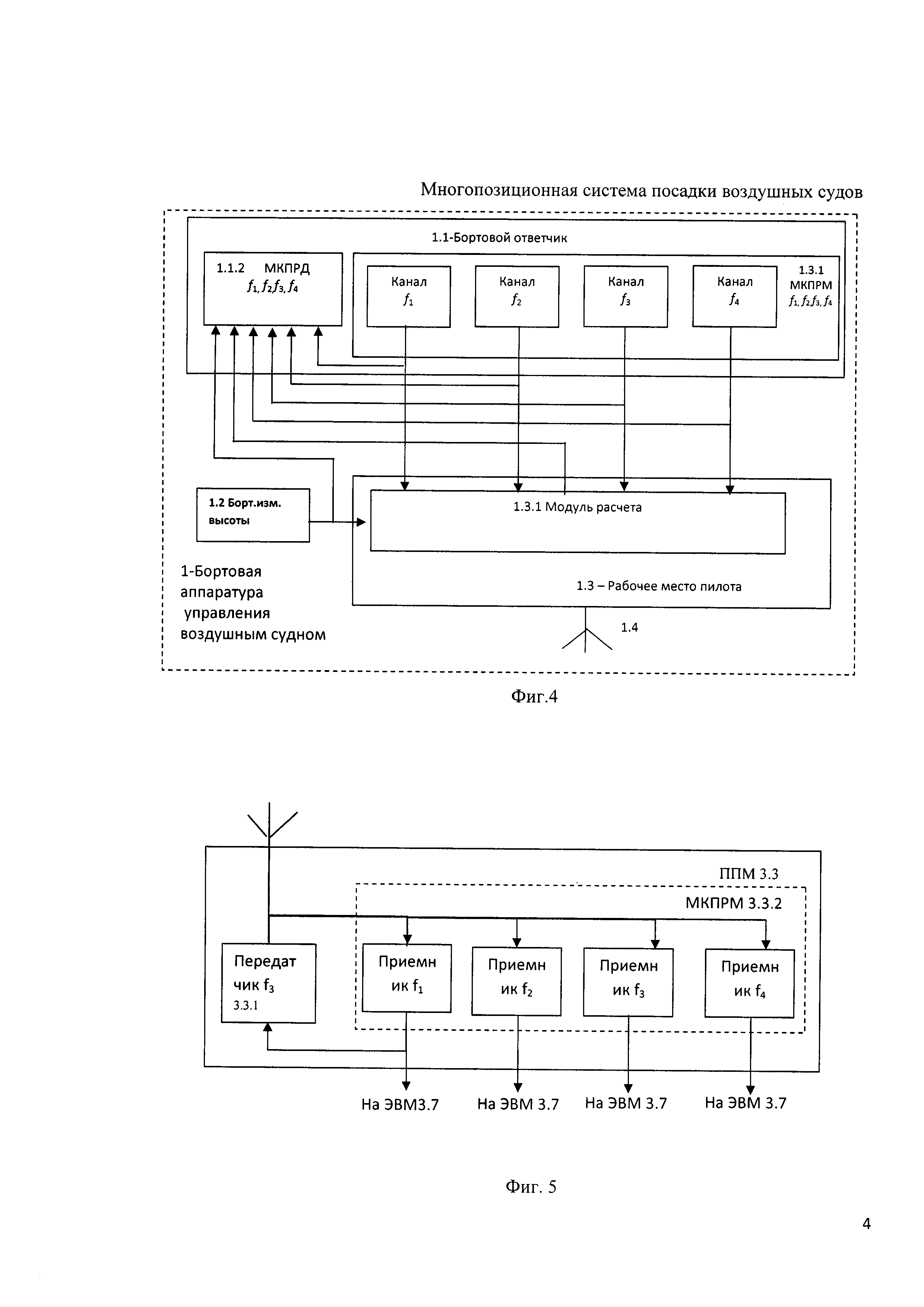
на фиг. 4 - структурная схема бортовой аппаратуры при использовании в системе «запрос-ответ» частотного метода разделения каналов;
на фиг. 5 - пример выполнения одного наземного приемо-передающего модуля (ППМ), состоящего из, по меньшей мере, связанных между собой каждого из трех передатчиков с одним из трех приемников;
на фиг. 6 приведены среднеквадратичные отклонения (СКО) определения местоположения для прототипа и заявляемого устройства, где кривая 1 - СКО определения местоположения ВС для прототипа; 2 - СКО определения местоположения ВС для заявляемого способа при определения координат ВС на Земле; 3 - СКО определения местоположения ВС для заявляемого способа при определения координат ВС на Земле при комплексировании координат;
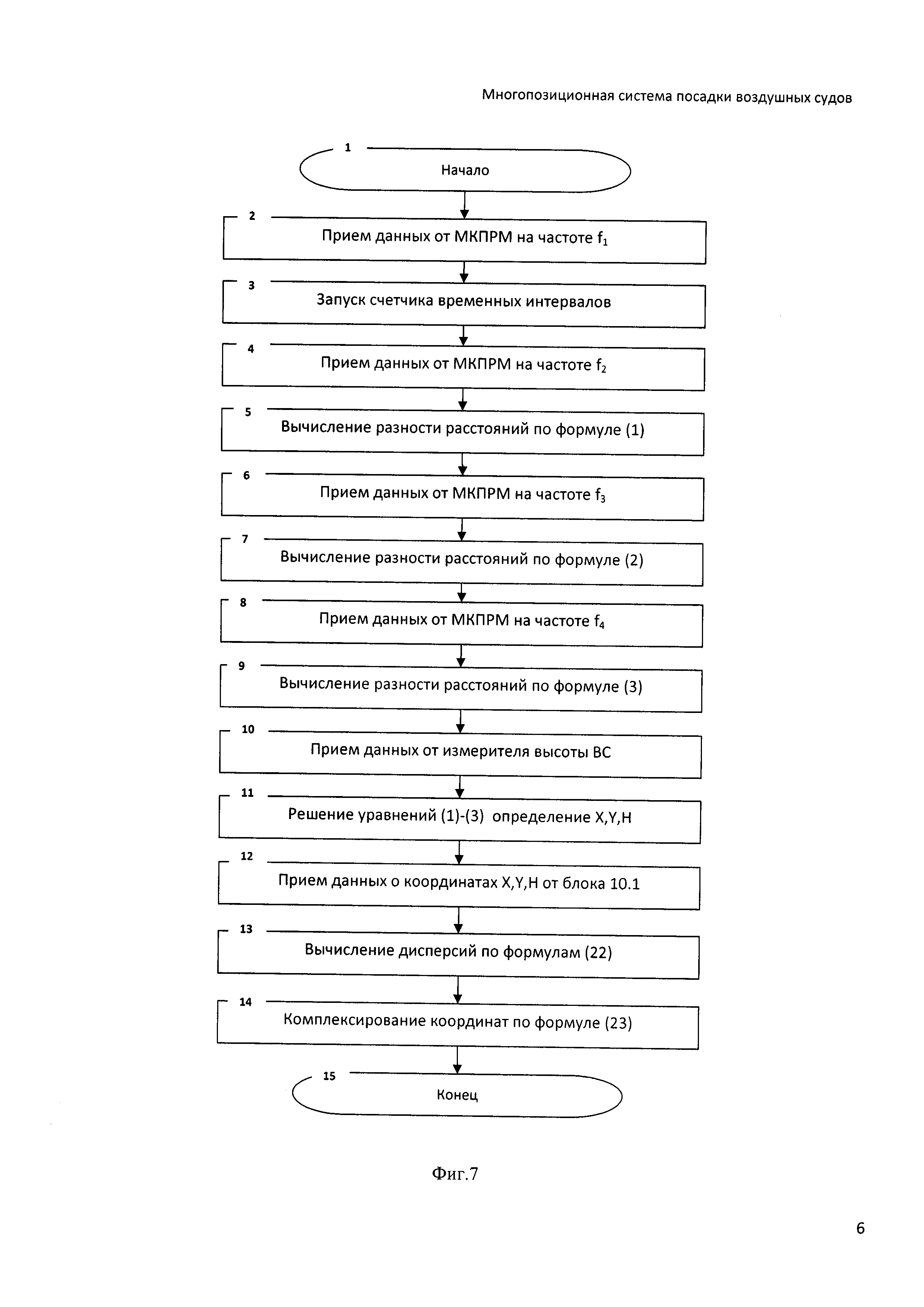
на фиг. 7 приведена блок-схема алгоритма работы бортового модуля расчета координат воздушного судна;
на фиг. 8 приведена блок-схема алгоритма работы наземного модуля расчета координат воздушного судна.
Пространственное расположение элементов многопозиционной системы посадки приведено на фиг. 2, где показано возможное расположение элементов системы - приемо-передающих модулей относительно взлетно-посадочной полосы (ВПП) и воздушного судна (ВС), причем показано, что для обеспечения возможности захода на посадку ВС с двух концов ВПП может быть использован, как и в прототипе, четвертый приемо-передающий модуль (ППМ).
На приведенных фигурах в качестве примера реализации показана система с четырьмя ППМ, при этом дополнительный ППМ позволяет обеспечить посадку ВС с любой требуемой стороны ВПП. При этом под ППМ 6.1 подразумевается приемо-передающий модуль, расположенный со стороны ВПП, противоположной направлению посадки, т.е. наиболее удаленный от ВС приемо-передающий модуль.
На структурной схеме многопозиционной системы посадки воздушного судна (фиг. 3) показаны:
1 - бортовая аппаратура управления воздушным судном;
1.1 - бортовой ответчик (БО) ВС;
1.1.1 - многоканальный приемник (МКПРМ 1.1.1) бортового ответчика;
1.1.2 - многоканальный передатчик (ПРД 1.1.2) бортового ответчика;
1.2 - бортовой измеритель высоты ВС;
1.3 - рабочее место пилота;
1.3.1 - бортовой модуль расчета координат воздушного судна и отклонения его от траектории посадки, в качестве примера установленный на рабочем месте пилота;
1.4 - бортовая антенна радиолинии «запрос-ответ»;
1.5 - бортовая антенна (БА) радиолинии управления посадкой;
2 - радиолиния «запрос-ответ»;
3 - наземная аппаратура управления воздушным судном;
3.1 - наземный приемо-передающий модуль с функцией запросчика (ППМ);
3.1.1 - наземный передатчик-запросчик;
3.1.2 - многоканальный приемник (МПРМ 3.1.2 в составе первого ППМ), в составе остальных ППМ - соответственно МПРМ 3.2.2, 3.3.2, 3.4.2;
3.2-3.4 - наземные приемо-передающие модули (ППМ);
3.5 - многоканальная однонаправленная линия связи;
3.5.1 - двунаправленная линия связи;
3.5.2 - многоканальная линия связи;
3.5.3 - многоканальная линия связи;
3.5.4 - многоканальная линия связи;
3.6 - радиолиния управления посадкой;
3.6.1 - наземный радиопередатчик радиолинии управления посадкой;
3.7 - наземная ЭВМ управления;
3.7.1 - наземный модуль расчета координат ВС и отклонения его от траектории посадки наземной ЭВМ 3.7 управления.
Согласно фиг. 2 и 3 наземная аппаратура управления воздушным судном 3 содержит наземный передатчик-запросчик 3.1.1, конструктивно входящий в первый приемо-передающий модуль (ППМ 1), и не менее трех наземных приемников МКПРМ 3.1.2, 3.2.2, 3.3.2 и 3.4.2, соединенных выходами через сигнальные линии 3.5, 3.5.2, 3.5.3, 3.5.4 связи соответственно с соответствующими входами входящего в наземную ЭВМ 3.7 управления наземного модуля 3.7.1 расчета координат воздушного судна и отклонения его от траектории посадки, управляющий выход наземной ЭВМ 3.7 через радиолинию 3.6 управления посадкой воздушного судна соединен с бортовой аппаратурой 1 управления воздушным судном, в состав которой входят бортовой модуль 1.3.1 расчета координат воздушного судна и отклонения его от траектории посадки, бортовой ответчик (БО) 1.1, содержащий многоканальные передатчик (МКПРД) 1.1.2 и приемник (МКПРМ) 1.1.1, низкочастотными выходами связанный с соответствующими входами запуска МКПРД 1.1.2 и, через бортовой модуль 1.3.1 расчета координат воздушного судна и его отклонения от траектории посадки, где хранятся идентификационные данные воздушного судна, с рабочим местом пилота 1.3, при этом БО 1.1 (высокочастотные выход МКПРД 1.1.2 и вход МКПРМ 1.1.1) соединен через радиолинию 2 «запрос-ответ» со всеми наземными приемо-передающими модулями (ППМ) 3.1, 3.2, 3.3, 3.4. Бортовая аппаратура 1 управления воздушным судном содержит также бортовой измеритель 1.2 высоты воздушного судна, соединенный через бортовой модуль 1.3.1 расчета координат воздушного судна и отклонения его от траектории посадки с МКПРД 1.1.2 бортового ответчика (БО) 1.1, а бортовой 1.3.1 и наземный 3.7.1 модули расчета координат воздушного судна и отклонения его от траектории посадки выполнены с учетом измерений высоты полета воздушного судна относительно местоположений ППМ, при этом два ППМ установлены по бокам от осевой линии взлетно-посадочной полосы в районе ее центра со смещением от осевой линии не менее чем на пятьсот метров, и, по крайней мере, один ППМ - со стороны, противоположной стороне захода воздушного судна на посадку, и на расстоянии, не меньшем четырехсот метров за торцом взлетно-посадочной полосы (ВПП).
В качестве примера рассмотрим работу системы при частотном способе разделения каналов в радиолинии 2 связи «запрос-ответ» бортовой аппаратуры 1 управления воздушным судном и наземными приемо-передающими модулями ППМ 3.1, 3.2, 3.3, 3.4, т.е при минимальном числе ППМ, равном четырем, для обеспечения посадки ВС с любого конца ВПП.
В этом случае передатчик-запросчик 3.1, который конструктивно и аппаратурно находится в первом ППМ 3.1 (фиг. 3), будет иметь частоту излучения f1, передатчик 1.1.2 бортового ответчика 1.1 - частоты f1, f2, f3, f4.
Второй ППМ 3.2 имеет частоту излучения - f2, третий ППМ 3.3 - частоту излучения - f3, четвертый ППМ 3.4 - частоту излучения - f4, а многоканальные приемники МПРМ 3.1.2, 3.2.2, 3.3.2, 3.4.2 всех ППМ способны принимать излучение соответственно на частотах f1, f2, f3, f4.
Структура бортовой аппаратуры 1 управления воздушным судном при частотном способе разделения каналов в системе из четырех наземных ППМ 3.1, 3.2, 3.3, 3.4, позволяющих осуществлять заход ВС на посадку с любого торца ВПП, будет иметь вид, изображенный на фиг. 4.
Структурная схема третьего приемо-передающего модуля ППМ 3.3 наземной аппаратуры управления воздушным судном при частотном способе разделения каналов будет иметь вид, изображенный на фиг. 5, структурная схема второго и четвертого приемо-передающих модулей ППМ 3.2 и ППМ 3.4 будет иметь аналогичный вид, но в ППМ 3.2, 3.3, 3.4 передатчики работают на разных частотах - f2, f3, f4 соответственно, структурная схема первого ППМ приведена на фиг. 3.
При определении координат ВС на борту система работает следующим образом.
Передатчик-запросчик 3.1.1, входящий в ППМ 3.1, запускаемый по линии связи 3.5.1 от модуля 3.7.1, излучает сигнал на частоте f1, при этом в сигнале содержится информация о прямоугольных координатах ППМ 3.1-3.4 (х1, y1, h1, x2, y2, h2, х3, у3, h3, x4, y4, h4) и расположении ВПП относительно этих модулей.
После приема сигнала на частоте f1 в бортовом модуле расчета 1.3.1, находящемся, например, на рабочем месте пилота 1.3, формируется сигнал запуска начала отсчета временных интервалов. По достижении запросным сигналом наземного передатчика - ПРД 3.2.1 второй позиции (в ППМ 3.2) производится излучение сигнала на частоте f2, бортовой МКПРМ 1.1.1, принимает эти сигналы, передает их в бортовой модуль расчета 1.3.1, где и вычисляет разность расстояний ΔR12:
 ,
,
По достижении запросным сигналом ПРД 3.3.1 третьей позиции (в ППМ 3.3) производится излучение сигнала на частоте f3, а МКПРМ 1.1.1 принимает эти сигналы, передает их в бортовой модуль расчета 1.3.1, где вычисляется разность расстояний ΔR13:
 .
.
По достижении запросным сигналом ПРД 3.4.1 четвертой позиции (в ППМ 3.4) производится излучение сигнала на частоте f4, а МКПРМ 1.1.1 принимает эти сигналы и аналогично вычисляется разность расстояний ΔR14:
 ,
,
tL12, tL13, tL14 - время распространения запросных сигналов до соответствующих ППМ;
t1, t2, t3, t4 - время приема сигналов на борту ВС.
На основании вышеприведенных уравнений бортовая аппаратура 1 управления воздушным судном, используя данные бортового измерителя 1.2 высоты ВС, определяет известными способами (см. 10: Шебшаевич B.C., Дмитриев П.П., Иванцевич И.В. и др. Сетевые спутниковые радионавигационные системы - Под ред. Шебшаевича В.С. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1993. - 408 с.) в бортовом модуле 1.3.1 расчета прямоугольные координаты ВС.
При определении координат ВС на наземном пункте система работает следующим образом.
Передатчик-запросчик 3.1.1 в первом модуле ППМ 3.1 запускается по линии 3.5.1 от наземного модуля расчета 3.7.1 и излучает сигнал на частоте f1, при этом от передатчика-запросчика 3.1.1, входящего в ППМ 3.1 (относительно координат которого и производится определение местоположения ВС), в наземную управляющую ЭВМ 3.7(на соответствующие входы наземного модуля расчета 3.7.1) поступает сигнал начала отсчета временных интервалов. После приема сигнала первого ППМ 3.1 на частоте f1 другими позициями (ППМ 3.2, 3.3, 3.4) они формируют сигналы запуска своих передающих устройств на соответствующих частотах f2, f3 и f4 с одновременным началом отсчета временных интервалов.
Сигналы на соответствующих частотах f1, f2, f3 и f4 принимаются бортовым МКПРМ 1.1.1 бортового ответчика (БО)1.1 и переизлучаются в пространство бортовым передатчиком МКПРД 1.1.2 на соответствующих частотах f1, f2, f3 и f4, при этом к каждому излучаемому сигналу добавляется идентификационный номер воздушного судна, поступающий с бортового модуля 1.3.1 расчета координат ВС.
Принятые многоканальным приемником МКПРМ 3.1.2 (в ППМ 3.1) на соответствующих частотах сигналы передаются на наземный модуль 3.7.1 расчета координат воздушного судна и, после проверки идентификационного номера ВС, там определяются временные интервалы относительно первой позиции (ППМ 3.1):

относительно ППМ 3.2

относительно ППМ 3.3

и четвертой позиции ППМ 3.4

где: Δt0 – неизвестное, но постоянное время задержки срабатывания бортового ответчика конкретного ВС на запрос от каждой позиции.
Величины  ,
,  и
и  могут быть вычислены заранее.
могут быть вычислены заранее.
На основании (4)-(7) формируется система линейных алгебраических уравнений (СЛАУ)
Обобщая СЛАУ (8) на систему, содержащую N приемо-передающих модулей, можно сделать вывод, что измерению подлежат N наклонных дальностей  , N⋅(N-1) - измерений сумм расстояний
, N⋅(N-1) - измерений сумм расстояний  . Такой подход позволяет сформировать систему линейных алгебраических уравнений (СЛАУ), в которой учитываются N2 измерений. Система уравнений (8) содержит избыточное количество измеряемых параметров относительно оцениваемых дальностей, что позволяет произвести их решение методом наименьших квадратов (см. 9: Повышение точности определения координат цели при реализации кооперативной обработки в многопозиционной радиолокационной системе / Борисов Е.Г., Машков Г.М., Турнецкий Л.С. // Радиотехника №5. - 2013. - с. 4-9).
. Такой подход позволяет сформировать систему линейных алгебраических уравнений (СЛАУ), в которой учитываются N2 измерений. Система уравнений (8) содержит избыточное количество измеряемых параметров относительно оцениваемых дальностей, что позволяет произвести их решение методом наименьших квадратов (см. 9: Повышение точности определения координат цели при реализации кооперативной обработки в многопозиционной радиолокационной системе / Борисов Е.Г., Машков Г.М., Турнецкий Л.С. // Радиотехника №5. - 2013. - с. 4-9).

где:  - означает рассчитанное значение дальномерных параметров;
- означает рассчитанное значение дальномерных параметров;
А - матрица размерностью N×N2, состоит из нулей и единиц, причем «1» - означает наличие соответствующего измерения, а «0» его отсутствие;
 - матрица оцениваемых параметров (матрица первичных измерений) размерностью 1×N2;
- матрица оцениваемых параметров (матрица первичных измерений) размерностью 1×N2;
матрица точности размерностью N2×N2, содержащая дисперсии ошибок измерений дальности и сумм расстояний;
вариационная диагональная N2×N2 матрица коэффициентов, диагональный элемент j=1, если измерение присутствует (либо используется для измерений) и j=0 - в противном случае.
Полагая, что дисперсии ошибок измерения дальности  , сумм расстояний
, сумм расстояний  одинаковы, т.е.
одинаковы, т.е.  , можно показать, что ковариационная матрица ошибок для системы (9) определяется как:
, можно показать, что ковариационная матрица ошибок для системы (9) определяется как:

Для СЛАУ (8) матрица A примет вид
а матрица измеренных значений

Подстановка (14) и (15) в (9) позволяет получить выражения для искомых параметров, которые в развернутой форме записи имеют вид:
Дисперсия дальностей относительно каждой позиции и смещения  , вызванного неизвестным временем срабатыванием бортового ответчика (БО 1.1), определяется по формуле (13) подстановкой (14):
, вызванного неизвестным временем срабатыванием бортового ответчика (БО 1.1), определяется по формуле (13) подстановкой (14):
После определения величины Δt0 неизвестное значение времени срабатывания бортового ответчика (БО 1.1) можно учесть в измеряемых параметрах в следующем цикле измерения, для которого
Тогда по аналогии можно показать, что
В этом случае точность определения дальностей относительно каждой из позиций возрастает, что следует из формулы:
и соответствует 
Таким образом, имея четыре измерения дальности i=1÷4 и решая систему уравнений вида

можно определить искомые прямоугольные координаты ВС (x,y,h) по известным координатам ППМ.
По радиолинии 3.6 управления посадкой производится обмен координатами, измеренными на борту ВС и на земле. На основании этих величин известными методами (см. 11: Вентцель Е.С. Теория вероятностей: Учеб. для вузов. - 6-е изд. стер. - М.: Высш. шк., 1999. - 576 с.) вычисляется в наземном модуле расчета 3.7.1 наземной ЭВМ управления 3.7 математическое ожидание и дисперсия прямоугольных координат ВС и отклонения его от траектории посадки.
Аналогичные операции проводятся на борту ВС, где расчеты проводятся в модуле расчета координат воздушного судна и отклонения его от траектории посадки 1.3.1, что позволяет получить комплексированные значения прямоугольных координат:
 ,
,  ,
,
 ,
,  ,
,  ,
,  , - прямоугольные координаты ВС, рассчитанные относительно расположения ППМ 3.1 и ВС соответственно, причем координаты
, - прямоугольные координаты ВС, рассчитанные относительно расположения ППМ 3.1 и ВС соответственно, причем координаты  и
и  рассчитаны по формуле (21), а координаты
рассчитаны по формуле (21), а координаты  ,
,  по (1)-(3);
по (1)-(3);
 - дисперсии ошибок определения прямоугольных координат, рассчитанные относительно расположения ППМ 3.1 и ВС соответственно.
- дисперсии ошибок определения прямоугольных координат, рассчитанные относительно расположения ППМ 3.1 и ВС соответственно.
На фиг. 6 приведены среднеквадратичные отклонения (СКО) определения местоположения ВС (в логарифмическом масштабе): кривая 1 - СКО определения местоположения на борту ВС, 2 - СКО определения местоположения на Земле, 3 - СКО определения местоположения при комплексировании.
Далее процессы будут повторяться до тех пор, пока не будет получено достаточное количество отсчетов и не придет на МКПРД 1.1.2 бортового ответчика (БО 1.1) сигнал от модуля расчета 1.3.1, запрещающий работу МКПРД 1.1.2 до конца данного цикла запроса. С посылкой передатчиком-запросчиком 3.1.1 следующего запросного импульса частоты f1 все процессы, описанные выше, будут повторяться.
Таким образом, и наземная ЭВМ 3.7, и бортовой модуль расчета координат ВС 1.3.1, который может быть установлен на рабочем месте 1.3 пилота, получают достаточное количество информации о положении ВС относительно ППМ 3.1, 3.2, 3.3, 3.4. При наличии как в наземной, так и в бортовой аппаратурах информации о расположении ВПП относительно ППМ 3.1, 3.2, 3.3, 3.4, и в наземной, и в бортовой аппаратурах будут рассчитываться и передаваться на бортовую аппаратуру отклонения ВС от линий курса и глиссады в текущий момент времени. Передача данных расчета наземной ЭВМ 3.7 на ВС осуществляется, как и в прототипе, посредством радиолинии 3.6 управления посадкой. При нарушении работы радиолинии 3.6 управления посадкой на бортовой модуль расчета координат ВС 1.3.1 будет поступать информация только по результатам бортовых измерений. Как показано выше, точность этих данных достаточна для выполнения посадки.
Точность измерения местоположения ВС по оси Y (фиг. 2), будет зависеть от расстояния между ППМ 3.2, 3.3, расположенных перпендикулярно оси ВП, а ППМ 3.1, расположенный вдоль оси ВПП, целесообразно размещать на удалении 400 и более метров от торца ВПП с противоположной стороны захода на посадку. Для обеспечения захода на посадку ВС с двух направлений ВПП необходимо устанавливать и четвертый ППМ 3.4 - с противоположного конца ВВП. Для улучшения измерения высоты полета ВС на больших удалениях от ВПП могут быть установлены дополнительные ППМ на больших удалениях от ВПП. При установке всех ППМ должно быть точно определено их местоположение в аэродромной службе. Это можно обеспечить с помощью лазерного теодолита. Таким образом, будет точно известно расстояние Li от ППМ до наземной ЭВМ 3.7 управления, а значит, время передачи информации может быть учтено при расчетах местоположения ВС.
При использовании любого способа разделения каналов в передатчике-запросчике ПРД 3.1.1 формируется запросный сигнал, который излучается в секторе захода ВС на посадку. После получения запросного сигнала в бортовом ответчике 1.1 формируется и излучается ответный сигнал с идентификационным номером воздушного судна, данными о высоте полета ВС, полученными с выхода измерителя 1.2 высоты ВС. При этом в моменты приема ППМ сигналов ответчика ПРД каждого из ППМ на соответствующих частотах излучают ответные сигналы, содержащие идентификационный номер воздушного судна.
В качестве модели движения ВС в ЭВМ 3.7 может быть принята гипотеза о его прямолинейном и равномерном движении, что хорошо согласуется с реальным движением ВС по глиссаде. Далее в ЭВМ 3.7 рассчитывается отклонение ВС по курсу Ек и углу места Ег от заданной глиссады захода на посадку, заложенной в память ЭВМ 3.7 для ВПП данного аэродрома. Угловые отклонения ВС по курсу Ек и глиссаде Ег с выхода ЭВМ 3.7 передаются через радиолинию 3.6 управления посадкой на борт ВС в формате инструментальных систем посадки, например ILS.
Аналогичные вычисления производятся и в бортовом модуле 1.3.1 расчета координат ВС бортовой аппаратуры 1 управления воздушным судном. Принятые на борту сигналы отклонения ВС от траектории посадки комплексируются с данными бортовых вычислений и могут отображаться на рабочем месте 1.3 пилота, они используются последним в ручном или автоматизированном режимах управлении посадкой ВС. При нарушении связи ВС с наземной ЭВМ 3.7, ВС может быть посажено по результатам бортовых измерений, что выгодно отличает предлагаемую систему посадки воздушных судов от прототипа.
Как видно из фиг. 6, точность измерений координат ВС в заявляемой системе выше, чем в прототипе, особенно это проявляется при удалении ВС от ВПП, что может оптимизировать заход ВС на посадку.
Существенным преимуществом заявляемой системы является сохранение ее работоспособности и выдача на рабочее место пилота достаточной информации для обеспечения посадки ВС при нарушении связи ВС с наземной ЭВМ, что выгодно отличает ее от прототипа.
Рассмотрим пример выполнения блоков предлагаемого устройства. Наземные многоканальные приемники МКПРМ 3.1.2, 3.2.2, 3.3.2,3.4.2, входящие в состав каждого ППМ 3.1, 3.2, 3.3, 3.4, а также бортовой многоканальный приемник МКПРМ 1.1.1 бортового ответчика 1.1 бортовой аппаратуры 1 управления ВС, могут быть выполнены как в (см. 12: Проектирование радиоприемных устройств под ред. Сиверса А.П. М.: «Сов. радио»,1976, - стр 485, стр. 68, рис. 2.25).
Бортовой и наземный модули расчета координат ВС и отклонения его от траектории посадки 1.3.1 и 3.7.1 работают в соответствии с блок-схемами алгоритмов, представленных на фиг. 7 и 8 соответственно, представляют собой устройства, реализующие эти вычислительные процедуры и могут быть выполнены на соответствующих ПЛИС, используемых, например в (см. 13: патент на полезную модель РФ №72339, МПК G06F 15/16, опубл. 10.04.2008).
ПРД 3.1.1, 3.2.1, 3.3.1, 3.4.1, введенные в состав каждого ППМ 3.1-3.4 и МКПРД 1.1.2 бортового ответчика 1.1 могут быть выполнены как в (см. 14: Петров Б.Е., Романюк В.А. Радиопередающие устройства на полупроводниковых приборах. Учебное пособие для радиотехнич. спец. вузов. - М.: Высш. шк. - 1989. - 232 с., рис. В5, стр. 8).
Остальные, используемые в изобретении блоки, могут быть выполнены как в (см. 15: патент на полезную модель РФ №113242, МПК B64D 45/04, G01S 1/16, опубл. 10.02.2012. Многопозиционная система посадки воздушных судов "ЛЭМЗ").
Используемые в изобретении блоки могут быть выполнены на основе стандартных, типовых радиотехнических элементов.
Всенаправленная антенна излучения
Устройство акустического представления пространственной информации для пользователей
Устройство для определения параметров движения цели
Способ определения координат цели в трехпозиционной дальномерной радиолоокационной системе
Адаптивное устройство разделения неортогональных цифровых сигналов двоичной фазовой манипуляции
Устройство для образования скважин в грунте ударным способом
Способ измерения установившегося после включения питания значения постоянного электрического сигнала на выходе измерительного преобразователя
Способ акустического представления пространственной информации для пользователей
Устройство для определения параметров движения объекта
Способ формирования заверенного цифровым водяным знаком цветного электронного изображения
Всенаправленная антенна излучения
Устройство акустического представления пространственной информации для пользователей
Устройство для определения параметров движения цели
Способ определения координат цели в трехпозиционной дальномерной радиолоокационной системе
Адаптивное устройство разделения неортогональных цифровых сигналов двоичной фазовой манипуляции
Устройство для образования скважин в грунте ударным способом
Способ измерения установившегося после включения питания значения постоянного электрического сигнала на выходе измерительного преобразователя
Способ акустического представления пространственной информации для пользователей
Устройство для определения параметров движения объекта
Способ формирования заверенного цифровым водяным знаком цветного электронного изображения

