Результат интеллектуальной деятельности: РАБОЧИЙ ОРГАН ДЛЯ КЛЕПАЛЬНОГО УСТРОЙСТВА
Вид РИД
Изобретение
Данное изобретение касается рабочего органа для клепального устройства согласно ограничительной части независимого пункта 1 формулы изобретения, клепального устройства с рабочим органом согласно ограничительной части независимого пункта 2, а также способа эксплуатации клепального устройства согласно независимому пункту 14 формулы изобретения.
Рабочие органы клепальных устройств для помещения заклепочных элементов в конструктивные узлы известны из уровня техники в различных вариантах выполнения.
Например, в DE 10 2005 028 055 A1 описано клепальное устройство для клепки конструктивных узлов самолетов. Это клепальное устройство имеет заклепочный накопитель, из которого заклепки транспортируются прямо в промежуточный накопитель. Промежуточный накопитель выполнен по типу рондоля (rondellartig) и содержит множество захватов, в которых осуществляется промежуточное хранение заклепочных элементов. Путем поворачивания промежуточного накопителя заклепочные элементы по мере необходимости подаются к держателю заклепки и из захвата с помощью выступа вталкиваются в держатель заклепки. При этом заклепочный элемент не направляется, и он может перекоситься, и, тем самым, не может быть размещен в держателе заклепки надежно или быть ориентирован в нем корректно. Если это происходит, то может потребоваться остановка производственного процесса для того, чтобы рабочий мог вручную удалить этот заклепочный элемент из держателя заклепки.
Кроме того, описываемый в DE 10 2005 028 055 A1 промежуточный накопитель заклепок сравнительно сложен и поэтому дорог. Он содержит множество подвижных деталей, так, например, каждый захват, а тем самым и каждое накопительное гнездо для одного заклепочного элемента имеет собственный привод.
И, наконец, промежуточный накопитель за счет своей рондольной формы занимает на рабочем органе клепального устройства сравнительно много конструктивного пространства.
В основу данного изобретения положена задача выполнить и усовершенствовать известный рабочий орган, а также известное клепальное устройство таким образом, чтобы производственный процесс был надежнее, и множество различных заклепочных элементов могли подаваться в клепальный модуль простым, экономичным и не требующим много места способом.
Эта задача решается посредством рабочего органа с признаками независимого пункта 1 формулы изобретения.
Для этого предлагается, в частности, чтобы рабочий орган содержал клепальный модуль для помещения заклепочного элемента в конструктивный узел, устройство выдачи заклепок для выдачи заклепочных элементов из заклепочного накопителя и манипулятора для перемещения заклепочного элемента из устройства выдачи заклепок к клепальному модулю.
Манипулятор согласно изобретению имеет установочную кинематическую систему и расположенный на ней захват для захватывания заклепочного элемента, причем эта установочная кинематическая система для позиционирования по меньшей мере одного захвата имеет по меньшей мере две установочные оси. Благодаря этому заклепочные элементы могут надежно передаваться в клепальный модуль, так как пространство передвижения захвата для передачи на клепальный модуль увеличивается за счет этих по меньшей мере двух установочных осей установочной кинематической системы.
К тому же, обеспечивается более гибкое расположение устройства выдачи заклепок и клепального модуля относительно друг друга, так что в итоге получается более компактная конструкция. Кроме того, затраты могут быть снижены за счет использования стандартных манипуляторов по сравнению с затратами на изготовляемые индивидуально промежуточные накопители согласно вышеописанному уровню техники.
Далее, вышеуказанная задача решается посредством клепального устройства с рабочим органом, охарактеризованного признаками независимого пункта 2 формулы изобретения. И в этом случае устройство выдачи заклепок и/или манипулятор предпочтительно размещены на рабочем органе, однако, дополнительно или альтернативно это устройство выдачи заклепок и/или этот манипулятор могут быть размещены и на клепальном устройстве. При этом обеспечиваются те же преимущества, что были описаны в связи с указанным рабочим органом.
В одной модификации изобретения установочная кинематическая система для позиционирования указанного по меньшей мере одного захвата имеет по меньшей мере три установочные оси, кроме того, предпочтительно установочная кинематическая система для позиционирования указанного по меньшей мере одного захвата имеет по меньшей мере четыре установочные оси. Благодаря дополнительным установочным осям обеспечивается более гибкое расположение клепального модуля и устройства выдачи заклепок относительно друг друга. Таким образом могут лучше использоваться конструктивные пространства, и в итоге может получиться более компактная конструкция.
Кроме того, предпочтительно эти установочные оси указанной установочной кинематической системы расположены кинематически последовательно и/или кинематически параллельно. За счет этого в зависимости от варианта выполнения и расположения устройства выдачи заклепок и клепального модуля могут быть получены компактные конструкции.
В одной модификации изобретения предлагается снабдить клепальное устройство, в частности, рабочий орган, в частности, бесприводным промежуточным накопителем для хранения заклепочных элементов. За счет этого могут получаться легкие и простые промежуточные накопители заклепочных элементов, расположенные вблизи клепального модуля.
Кроме того, согласно одной самостоятельной идее предлагается рабочий орган для клепального устройства, причем этот рабочий орган содержит клепальный модуль для помещения заклепочного элемента в конструктивный узел, устройство выдачи заклепок для выдачи заклепочных элементов из заклепочного накопителя и бесприводный промежуточный накопитель для хранения заклепочных элементов. За счет этого может быть создан экономичный промежуточный накопитель, который позволяет обеспечить легкое и простое промежуточное хранение заклепочных элементов вблизи клепального модуля. Этот рабочий орган, в частности, может быть выполнен также без манипулятора для перемещения заклепочного элемента от устройства выдачи заклепок к клепальному модулю, имеющего установочную кинематическую систему и установленный на ней захват для захватывания заклепочного элемента, и, в частности, без установочной кинематической системы для позиционирования захвата, которая имеет по меньшей мере две установочные оси.
Согласно еще одной самостоятельной идее предлагается клепальное устройство с рабочим органом, причем этот рабочий орган содержит клепальный модуль для помещения заклепочного элемента в конструктивный узел, причем это клепальное устройство, в частности, этот рабочий орган содержит устройство выдачи заклепок для выдачи заклепочных элементов из заклепочного накопителя, и причем это клепальное устройство, в частности, рабочий орган, содержит бесприводный промежуточный накопитель для хранения заклепочных элементов. За счет этого создается экономичный промежуточный накопитель, который обеспечивает легкое и простое промежуточное хранение заклепочных элементов вблизи клепального модуля. Этот рабочий орган, в частности, может быть выполнен и без манипулятора для перемещения заклепочного элемента от устройства выдачи заклепок к клепальному модулю, имеющего установочную кинематическую систему и находящийся на ней захват для захватывания заклепочного элемента, и, в частности, без установочной кинематической системы для позиционирования захвата, имеющей по меньшей мере две установочные оси.
Предпочтительно, однако, вышеупомянутый рабочий орган, соответственно, вышеупомянутое клепальное устройство имеют манипулятор, в частности, с установочной кинематической системой для перемещения заклепочного элемента от устройства выдачи заклепок и/или из промежуточного накопителя к клепальному модулю, и/или к промежуточному накопителю. В отношении предпочтительного выполнения манипулятора делается отсылка к нижеследующему описанию.
Предпочтительно промежуточный накопитель выполнен с возможностью хранения заклепочных элементов различных типов и/или различного размера.
Манипулятор предпочтительно может загружать в заклепочный накопитель заклепочные элементы из устройства выдачи заклепок и/или из клепального модуля. Дополнительно или альтернативно клепальный модуль с помощью манипулятора может снабжаться заклепочными элементами из промежуточного накопителя.
В отношении способа указанная вначале задача решается признаками независимого пункта 14 формулы изобретения.
Благодаря тому, что в предлагаемом изобретением рабочем органе, соответственно, в заявляемом клепальном устройстве захват упомянутого манипулятора захватывает заклепочный элемент в устройстве выдачи заклепок, и этот манипулятор за счет перестановки указанной установочной кинематической системы перемещает заклепочный элемент к клепальному модулю и передает в клепальный модуль, обеспечиваются такие же преимущества, что и приведенные для рабочего органа и клепального устройства.
В одной модификации способа захват забирает заклепочный элемент в устройстве выдачи заклепок и/или в промежуточном накопителе с заданным положением, и/или передает заклепочный элемент с заданным положением в клепальный модуль и/или в промежуточный накопитель. За счет этого возможно дальнейшее повышение качества процесса, так как заклепка при передаче не может застревать или выскальзывать.
В дальнейшем данное изобретение поясняется подробнее с привлечением чертежей, иллюстрирующих лишь один пример выполнения. На чертежах показано следующее.
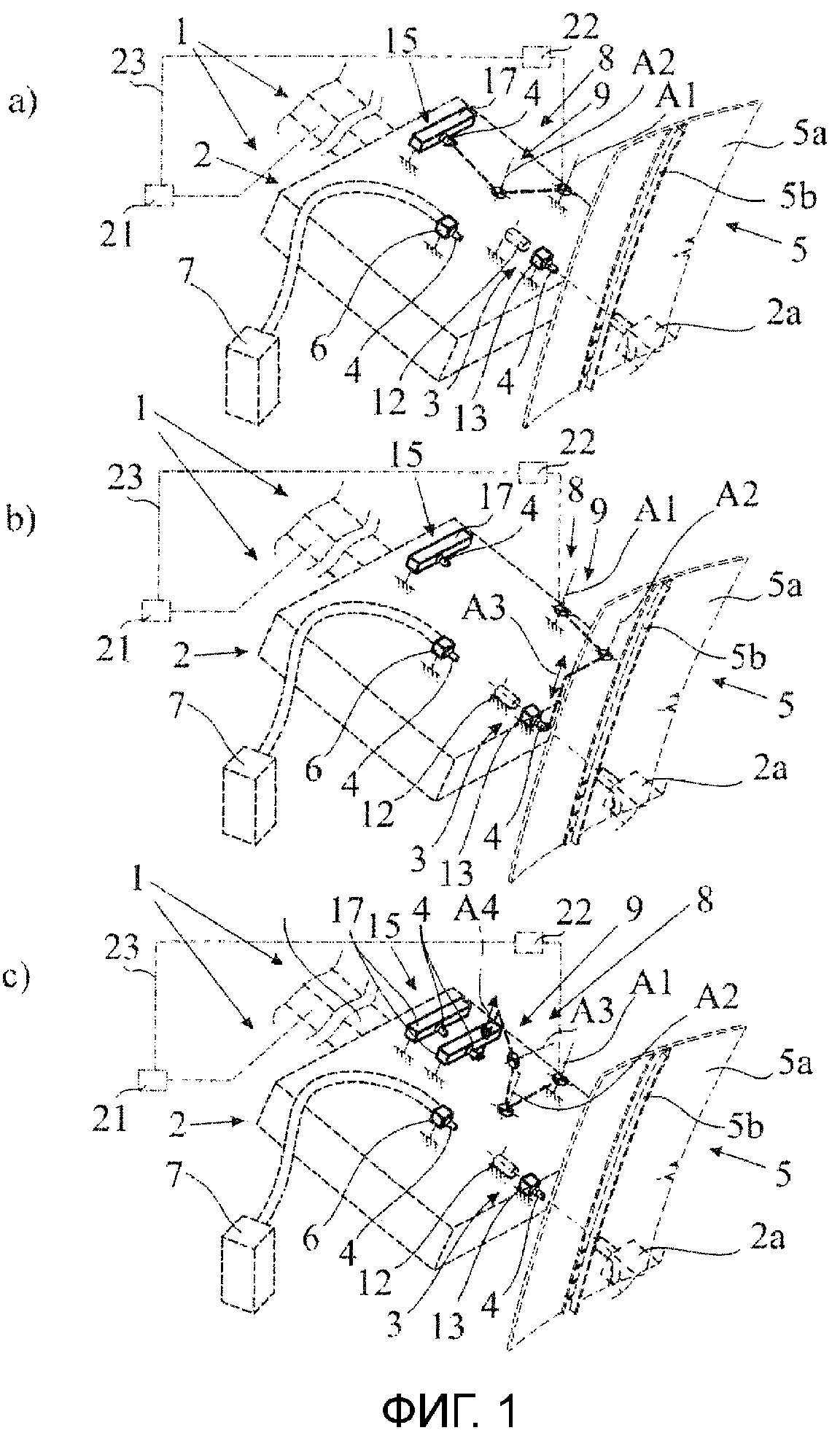
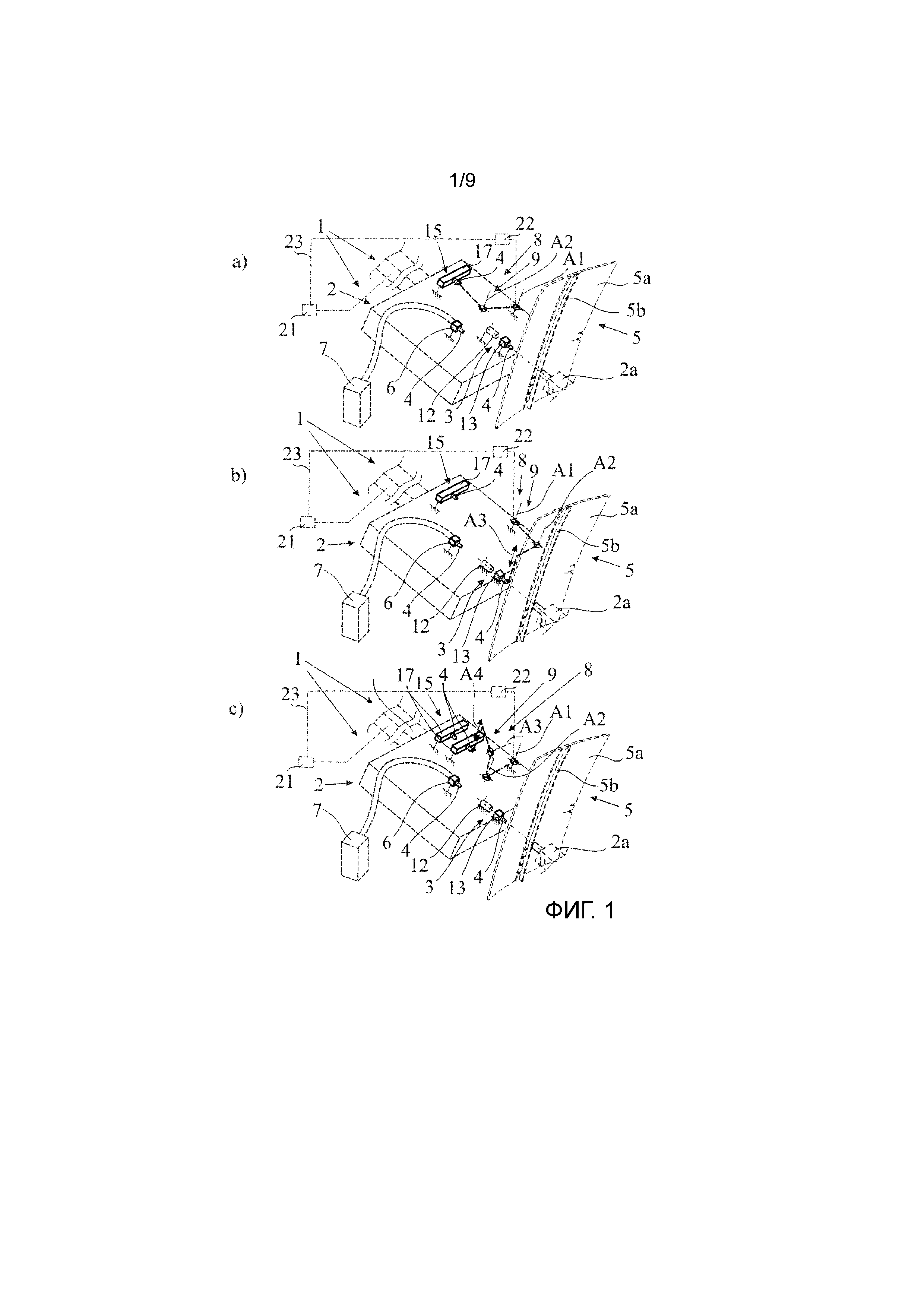
Фиг.1 - схематично, предлагаемый изобретением рабочий орган, соответственно, рабочий орган предлагаемого изобретением клепального устройства с: а) установочной кинематической системой с двумя установочными осями; b) установочной кинематической системой с тремя установочными осями; и c) установочной кинематической системой с четырьмя установочными осями,
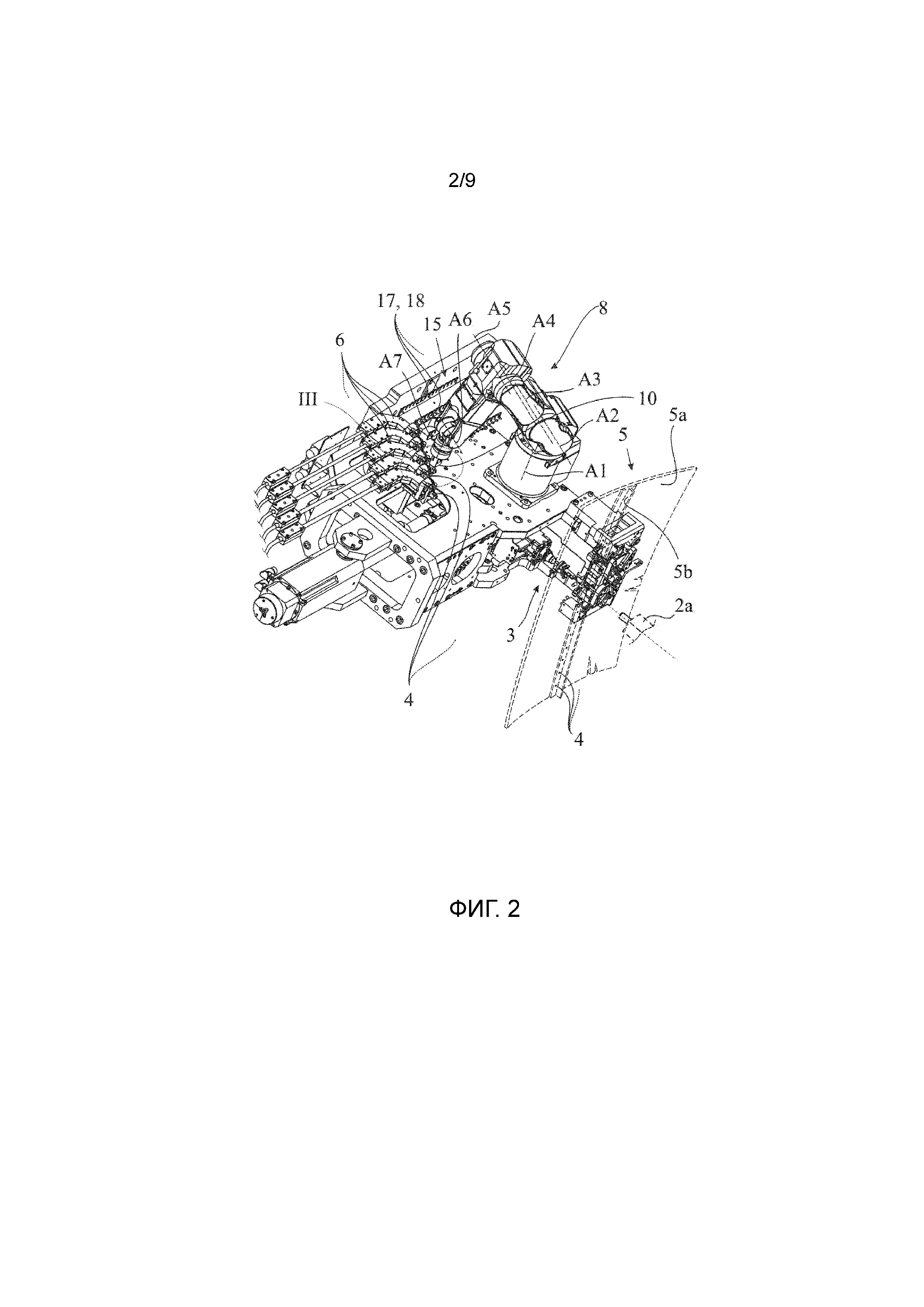
Фиг.2 - еще один пример выполнения предлагаемого изобретением рабочего органа, соответственно, рабочего органа предлагаемого изобретением заклепочного устройства, в трехмерном представлении,
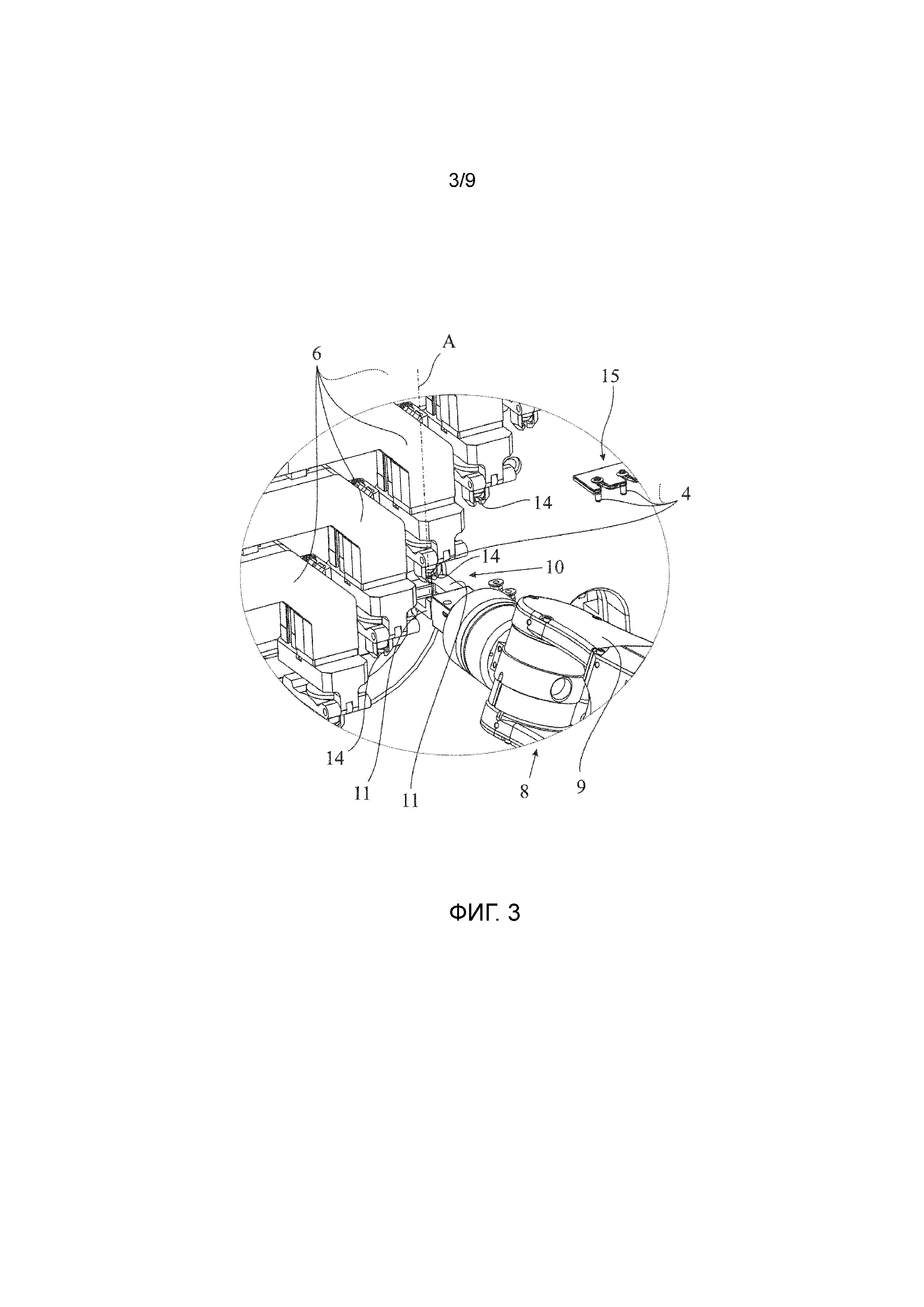
Фиг.3 - захват согласно примеру выполнения по Фиг.2 в положении на устройстве выдачи заклепок,
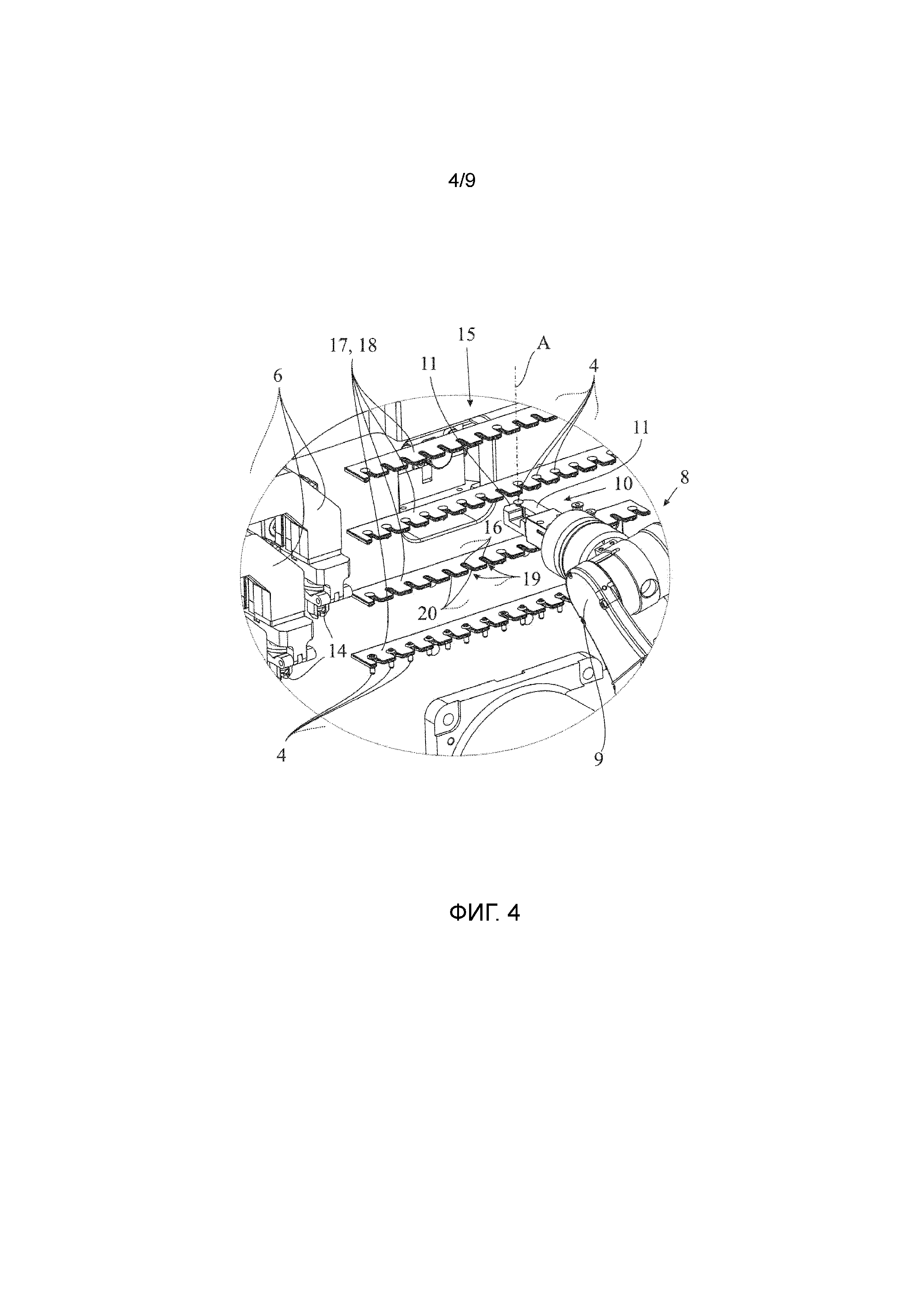
Фиг.4 - захват согласно примеру выполнения по Фиг.2 в положении на промежуточном накопителе перед вставкой заклепочного элемента в промежуточный накопитель,
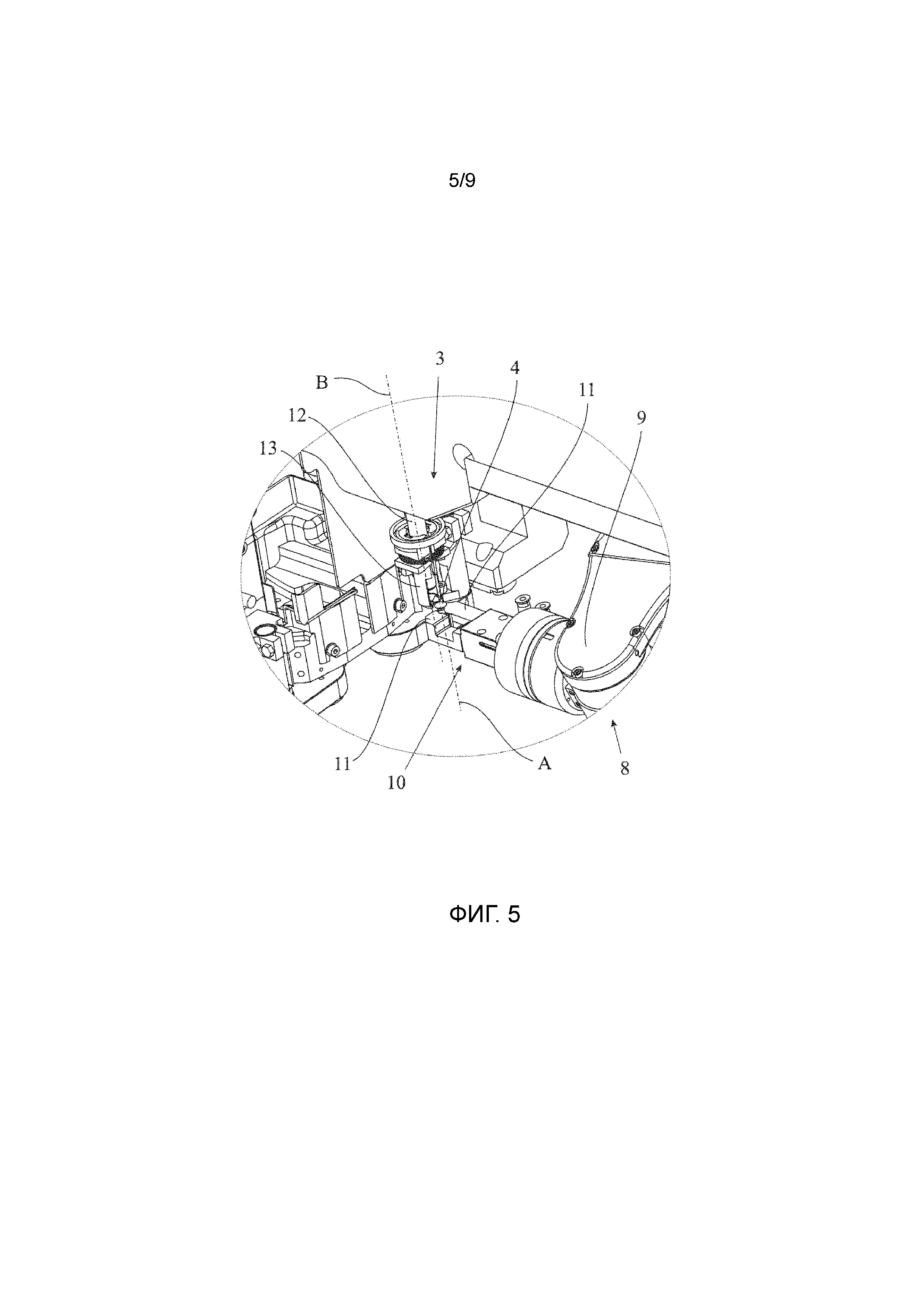
Фиг.5 – захват согласно примеру выполнения по Фиг.2 в положении на клепальном модуле перед вставкой заклепочного элемента в держатель заклепки,
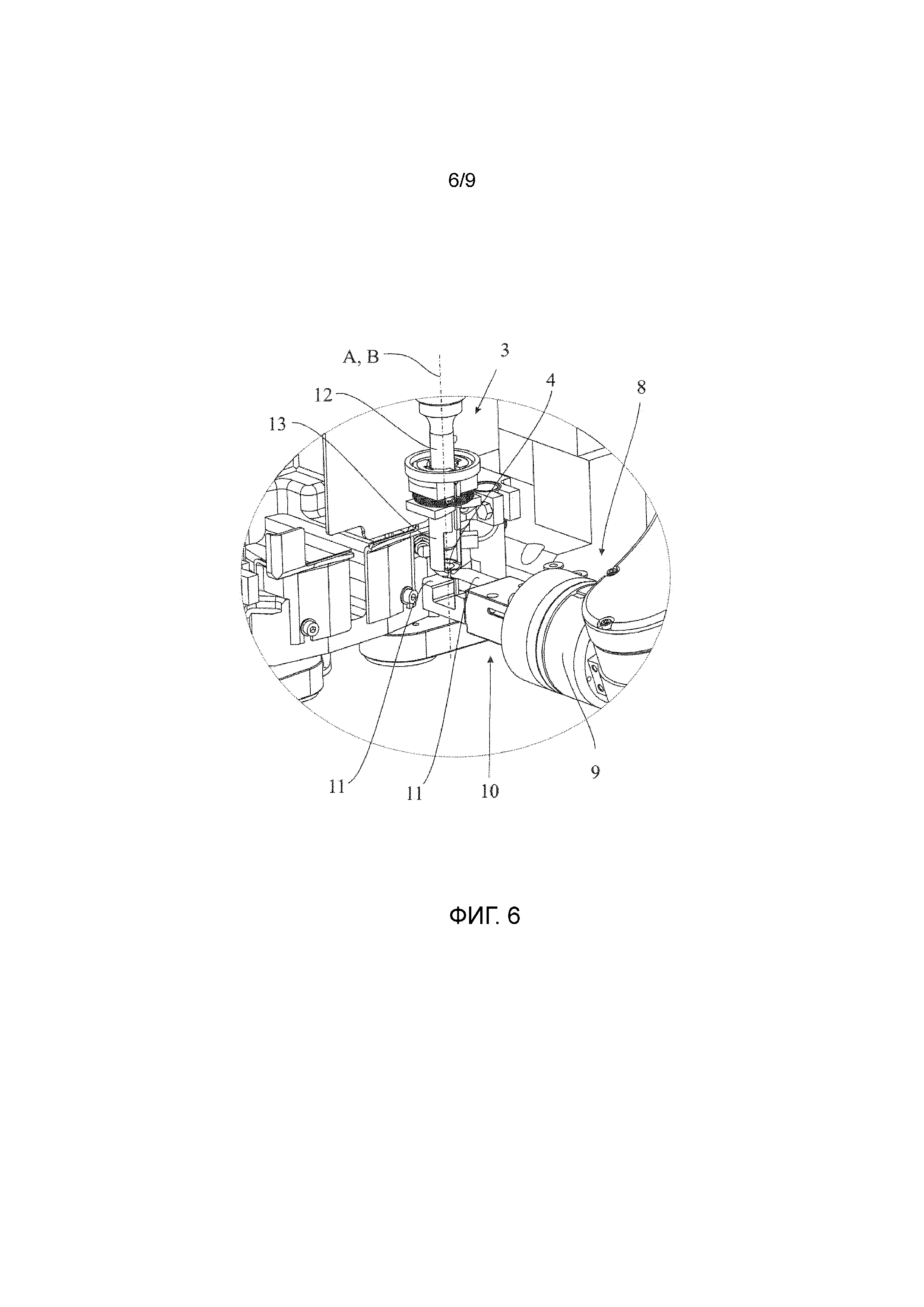
Фиг.6 - захват согласно примеру выполнения по Фиг.2 при вставке заклепочного элемента в держатель заклепки с уже вставленным в держатель заклепки заклепочным элементом, и
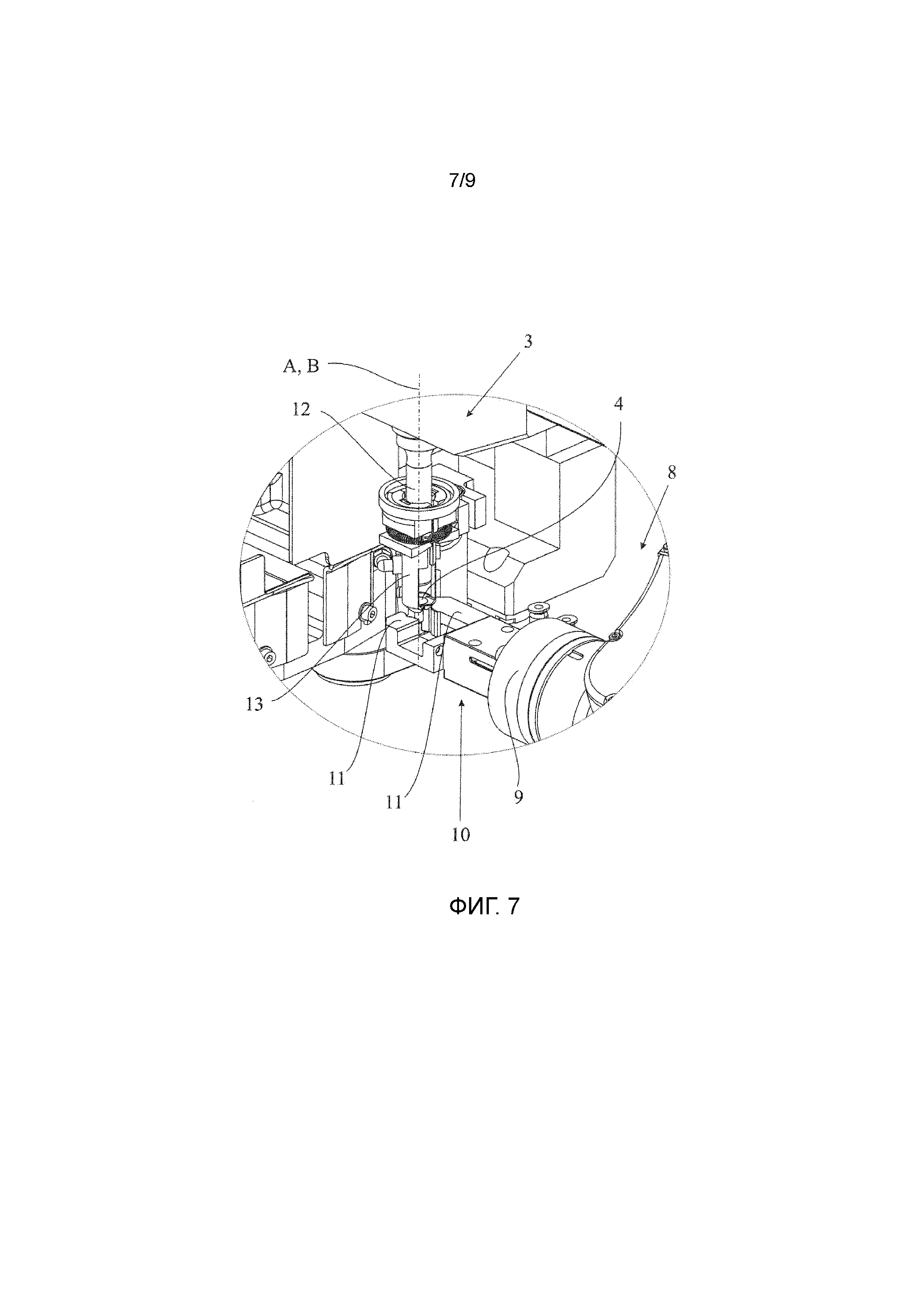
Фиг.7 - захват согласно примеру выполнения по Фиг.2 после отпускания заклепочного элемента в держателе заклепки,
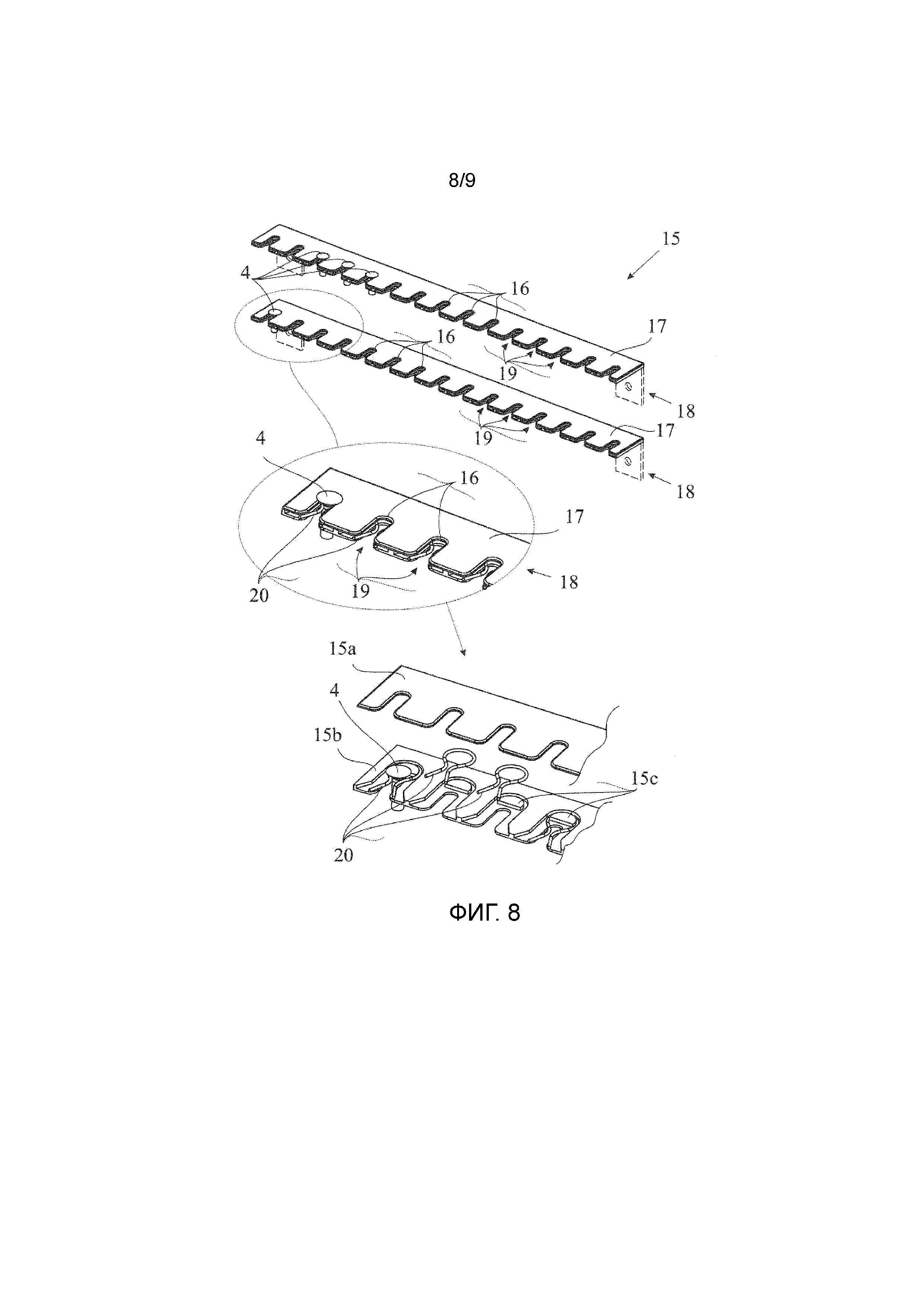
Фиг.8 - промежуточный накопитель; помимо увеличенного изображения вида спереди промежуточного накопителя, представлен также в подетальном изображении,
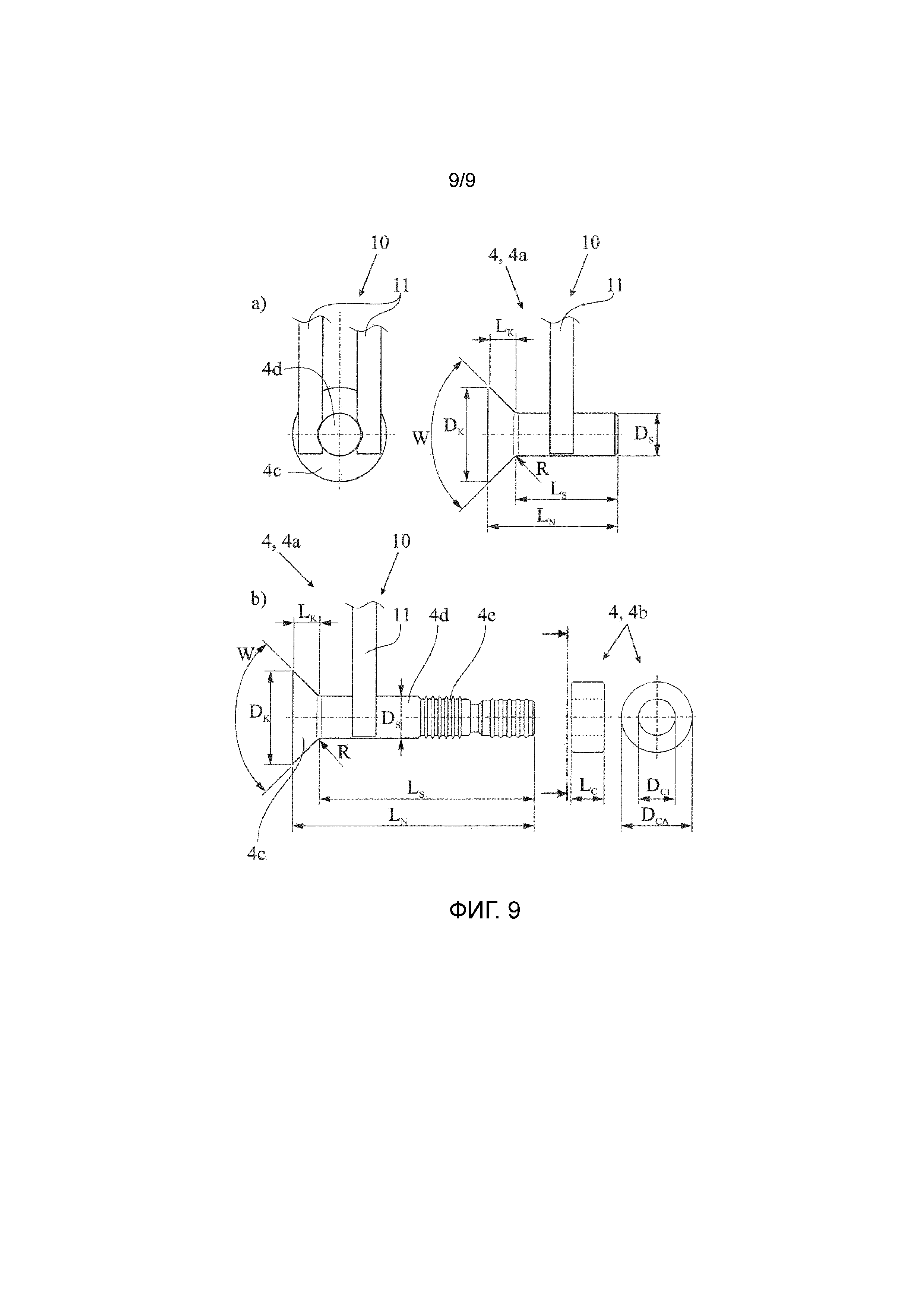
Фиг.9 - в качестве примера, заклепочные элементы, захваченные захватом загрузочно-разгрузочного устройства.
На Фиг.1 показан предлагаемый изобретением рабочий орган 2 для клепального устройства 1. Рабочий орган 2 содержит клепальный модуль 3 для помещения заклепочного элемента 4 в конструктивный узел 5.
Кроме того, рабочий орган 2 может содержать не показанный сверлильный модуль для сверления заклепочных отверстий и/или не показанный измерительный модуль для измерения просверленных отверстий.
Клепальное устройство 1 здесь и предпочтительно имеет робот, который несет на себе указанный рабочий орган 2. Особенно предпочтительно, если этот робот выполнен как портальный робот. Рабочий орган 2 может использоваться в качестве обрабатывающего инструмента, в частности, для клепального устройства, соответственно, сверлильно-клепального устройства, как это раскрыто в заявке на полезную модель DE 20 2015 104 273 U1. В этом отношении следует сослаться на DE 20 2015 104 273 U1.
Конструктивный узел 5 здесь и предпочтительно имеет две соединяемые друг с другом части 5a, 5b. После склепывания они образуют здесь и предпочтительно сборный узел. Здесь и предпочтительно конструктивный узел 5, соответственно, сборный узел является конструктивным узлом структуры самолета.
Помещение заклепочных элементов 4 в конструктивные узлы 5 происходит, как правило, следующим образом. Конструктивный узел 5, соответственно, подлежащие соединению части 5a, 5b сначала просверливаются, а затем это сверленое отверстие измеряется. В зависимости от результата измерения сверленого отверстия определяется тип и/или размер, в частности, по диаметру и длине, заклепочного элемента 4, в частности, с помощью не показанного измерительного модуля. За счет этого получается множество заклепочных элементов 4, которые должны быть поданы в клепальный модуль 3 в зависимости от результата измерения.
Чаще всего перед сверлением нельзя определить, какой именно заклепочный элемент 4 потребуется для выполняемого сверленого отверстия. Это можно будет определить только по фактической геометрии сверленого отверстия. Поэтому должны запасаться различные заклепочные элементы 4, предпочтительно вблизи клепального модуля 3. Если после измерения известен подлежащий установке заклепочный элемент 4, то его можно подать в клепальный модуль 1.
Предлагаемое изобретением клепальное устройство 1, здесь и предпочтительно - рабочий орган 2 содержит устройство 6 выдачи заклепок, предназначенное для выдачи заклепочных элементов 4 из заклепочного накопителя 7. Заклепочный накопитель 7 может быть расположен на рабочем органе 2 и/или на роботе, несущем на себе рабочий орган 2. Предпочтительно он расположен отдельно от рабочего органа 2, в частности, отдельно от клепального устройства 1.
Могут быть предусмотрены дополнительные устройства 6 выдачи заклепок, в частности, для заклепочных элементов 4 различных типов и/или различного размера, как это показано на Фиг.2 и Фиг.3. Предпочтительно клепальное устройство 1 содержит несколько питающих линий от заклепочного накопителя 7 к устройству 6 выдачи заклепок. Здесь и предпочтительно каждое устройство 6 выдачи заклепок имеет свою питающую линию от заклепочного накопителя 7. В последующих вариантах выполнения для устройства 6 выдачи заклепок, соответственно, для устройств 6 выдачи заклепок используется один подход (Singular), и варианты выполнения для одного устройства 6 выдачи заклепок действительны и для других устройств 6 выдачи заклепок, однако, предпочтительно они аналогичны.
Предлагаемое изобретением клепальное устройство 1, здесь и предпочтительно - рабочий орган 2 имеет один манипулятор 8 для перемещения заклепочного элемента 4 от устройства 6 выдачи заклепок к клепальному модулю 3.
Этот манипулятор 8 имеет установочную кинематическую систему 9 и расположенный на ней захват 10 для захватывания заклепочного элемента 4. Установочная кинематическая система 9 согласно изобретению для позиционирования захвата 10, в свою очередь, имеет по меньшей мере две установочные оси A1, A2, A3, A4, A5, A6, A7. За счет этого заклепочные элементы 4 могут надежно передаваться на клепальный модуль 3. Перекос или вставка под углом могут надежно предотвращаться.
Кроме того, становится возможным более гибкое расположение устройства 6 выдачи заклепок и клепального модуля 3 относительно друг друга, так что в целом получается более компактная конструкция. Далее, благодаря использованию стандартных манипуляторов 8 могут быть снижены затраты.
Предпочтительно устройство 6 выдачи заклепок расположено на рабочем органе 2, однако, в предлагаемом изобретением клепальном устройстве 1 такое устройство 6 выдачи заклепок может быть установлено на этом клепальном устройстве 1 отдельно от рабочего органа 2.
Это относится также и к манипулятору 8. Манипулятор 8 предлагаемого изобретением рабочего органа 2 тоже расположен на нем, однако, в порядке альтернативы этот манипулятор 8 в предлагаемом изобретением клепальном устройстве 1 может быть установлен на этом клепальном устройстве 1 отдельно от рабочего органа 2.
В частности, устройство 6 выдачи заклепок и/или манипулятор 8 могут быть размещены на роботе, несущем на себе этот рабочий орган 2.
Установочная кинематическая система 9 для позиционирования захвата 10 предпочтительно имеет не только по меньшей мере две установочные оси A1, A2, A3, A4, A5, A6, A7, как показано на Фиг.1a. Предпочтительно эта установочная кинематическая система 9 для позиционирования захвата 10 имеет по меньшей мере три установочные оси A1, A2, A3, A4, A5, A6, A7, как показано на Фиг.1b. Далее, предпочтительно установочная кинематическая система 9 для позиционирования захвата 10 имеет по меньшей мере четыре установочные оси A1, A2, A3, A4, A5, A6, A7, как показано на Фиг.1c. За счет увеличения количества установочных осей A1, A2, A3, A4, A5, A6, A7 возможно более гибкое размещение устройства 6 выдачи заклепок по отношению к клепальному модулю 3.
Эти установочные оси A1, A2, A3, A4, A5, A6, A7 манипулятора 8 здесь и предпочтительно имеют по одному собственному приводу. Таким образом обеспечивается максимально гибкое управление движением. Однако, в порядке альтернативы отдельные установочные оси A1, A2, A3, A4, A5, A6, A7 могли бы вместе приводиться опосредованно через приводной силопередающий элемент.
Предпочтительно эти установочные оси A1, A2, A3, A4, A5, A6, A7 указанной установочной кинематической системы 9 расположены кинематически последовательно и/или кинематически параллельно. В зависимости от расположения устройства 6 выдачи заклепок по отношению к клепальному модулю 3 возможно кинематически последовательное и/или кинематически параллельное расположение установочных осей A1, A2, A3, A4, A5, A6, А7, обеспечивающие компактную конструкцию.
Дополнительно или альтернативно по меньшей мере одна установочная ось A1, A2, A3, A4, A5, A6, A7 манипулятора 8 является осью вращения и/или линейной осью. Кроме того, предпочтительно по меньшей мере две установочные оси A1, A2, A3, A4, A5, A6, A7 манипулятора 8 являются осями вращения и/или линейными осями. В примере выполнения по Фиг.1a манипулятор 8 имеет, например, две оси вращения в качестве установочных осей A1, A2. В примере выполнения по Фиг.1b установочная кинематическая система 9 имеет две оси вращения и одну линейную ось в качестве установочных осей A1, A2, A3. В примере выполнения по Фиг.1c установочная кинематическая система 9 имеет еще одну ось вращения.
В примере выполнения по Фиг.1b - и предпочтительно - используется манипулятор 8, выполненный в виде робота с сочлененной рукой. Робот с сочлененной рукой здесь и предпочтительно может быть выполнен как вертикальный робот с сочлененной рукой и/или как горизонтальный робот с сочлененной рукой. В порядке альтернативы, однако, манипулятор 8 может быть выполнен как промышленный робот. Это показано в примере выполнения по Фиг.2-7.
Для дальнейшего повышения гибкости манипулятора 8 установочная кинематическая система 9 для позиционирования захвата 10 может иметь по меньшей мере пять, предпочтительно по меньшей мере шесть, еще более предпочтительно по меньшей мере семь установочных осей A1, A2, A3, A4, A5, A6, A7. В одном таком варианте выполнения особенно хорошо зарекомендовало себя выполнение манипулятора 8 в виде промышленного робота. В примере выполнения по Фиг.2-7, например, нашел применение промышленный робот с семью установочными осями.
Для захватывания заклепочных элементов 4 захват 10 здесь и предпочтительно имеет по меньшей мере две губки 11 захвата. При транспортировке захват 10 удерживает заклепочный элемент 4 предпочтительно с силовым замыканием и/или с геометрическим замыканием. Предпочтительно захват 10 может захватывать заклепочные элементы 4 различных типов и/или различного размера. Таким образом с помощью захвата 10 различные заклепочные элементы 4 могут транспортироваться к клепальному модулю 3. Предпочтительно захват 10 захватывает только один заклепочный элемент 4. Здесь и предпочтительно он не предназначен для одновременного перемещения нескольких заклепочных элементов 4.
Дополнительно или альтернативно на указанной установочной кинематической системе 9 может быть расположен еще один захват 10. Предпочтительно оба захвата 10 расположены напротив друг друга и выполнены как поворотный узел. В этом случае можно, например, простым образом извлечь из клепального модуля 3 заклепочный элемент 4 с помощью захвата 10 и после выполнения установочного движения с помощью другого захвата 10 передать уже захваченный им заклепочный элемент 4 в клепальный модуль 3. Дополнительно на указанной установочной кинематической системе 9 могут быть установлены и другие захваты 10. В таком случае они расположены предпочтительно по типу магазина, в частности, в форме рондоля.
Клепальный модуль 3 предпочтительно имеет один клепальный инструмент 12 и по меньшей мере один держатель 13 заклепки. Держатель 13 заклепки проходит здесь и предпочтительно вдоль геометрической продольной оси A. Предпочтительно клепальный модуль 3 для приема заклепочного элемента 4 может перемещаться, в частности, линейно. Предпочтительно для приема заклепочного элемента 4 из рабочего положения, в котором клепальный модуль 3 вводит заклепочный элемент 4 в конструктивный узел 5, он перемещается в положение перевода для приема этого заклепочного элемента 6. Для помещения заклепочного элемента 6 в конструктивный узел 5 клепальный модуль движется предпочтительно с передаваемым заклепочным элементом 4 снова в рабочее положение.
Дополнительно или альтернативно устройство 6 выдачи заклепок может иметь стопор 14 для стопорения и удержания с заданным положением заклепочного элемента 4, поданного из заклепочного накопителя 7. Под «заданным положением» предпочтительно следует понимать определенную позицию и ориентацию. С помощью стопора 14 обеспечивается заданная по положению позиция заклепочного элемента 4 в устройстве 6 выдачи заклепок. Это облегчает захватывание заклепочного элемента 4 с помощью захвата 10 манипулятора 8.
Дополнительно или альтернативно клепальное устройство 1, в частности, рабочий орган 2 имеет один, в частности, бесприводный промежуточный накопитель 15 для хранения заклепочных элементов 4. Как пояснялось в общей части данного описания, заявляется также рабочий орган 2, соответственно, клепальное устройство 1 с бесприводным промежуточным накопителем 15, в частности, также и без манипулятора, или с манипулятором, выполненным иначе, чем описанный выше.
Промежуточный накопитель 15 здесь и предпочтительно предназначен для того, чтобы принимать заклепочные элементы 4 различных типов и/или различного размера. Кроме того, предпочтительно промежуточный накопитель 15 имеет накопительные гнезда 16 для заклепочных элементов 4. Некоторые, в частности, все накопительные гнезда 16 предпочтительно выполнены с возможностью приема заклепочных элементов 4 различных типов и/или различного размера. За счет этого повышается гибкость при загрузке промежуточного накопителя 15 заклепочными элементами 4. Предпочтительно промежуточный накопитель 15 выполнен таким образом, что заклепочные элементы 4 могут извлекаться из каждого накопительного гнезда 16 по отдельности.
Здесь и предпочтительно промежуточный накопитель 15 может быть заменяемым и, в частности, с помощью зажимного соединения может быть установлен на клепальном устройстве 1, в частности, на рабочем органе 2. Дополнительно или альтернативно такой промежуточный накопитель 15 может быть также расположен на роботе клепального устройства 1. Промежуточный накопитель 15 может содержать несколько элементов 17 промежуточного накопителя, которые установлены с возможностью замены, в частности, с помощью зажимного соединения на клепальном устройстве 1, в частности, на рабочем органе 2 и/или на роботе. За счет этого клепальное устройство 1, соответственно, рабочий орган 2 в зависимости от вида обработки могут быть оснащены различными предварительно загружаемыми промежуточными накопителями 15, соответственно, элементами 17 промежуточного накопителя.
Промежуточный накопитель 15 здесь и предпочтительно может иметь рондоль- или реечную форму. Предпочтительно промежуточный накопитель 15, как показано на Фиг.4, имеет гребенчатую структуру. Так что в промежуточном накопителе 15 можно простым образом запасти большее количество заклепочных элементов 4. Предпочтительно промежуточный накопитель 15 выполнен с возможностью приема по меньшей мере 25 заклепочных элементов 4, предпочтительно для приема по меньшей мере 50 заклепочных элементов 4, предпочтительно по меньшей мере 75 заклепочных элементов 4. За счет этого становится возможным хранение большого числа различных заклепочных элементов 4 вблизи клепального модуля 3.
Дополнительно или альтернативно промежуточный накопитель 15 может иметь несколько уровней 18 хранения, которые здесь и предпочтительно образованы отдельными гребенчатыми структурами. Предпочтительно один уровень (плоскость) 18 хранения может быть образован одним элементом 17 промежуточного накопителя.
Предпочтительно промежуточный накопитель 15 имеет направляющие прорези 19, которые принимают заклепочные элементы 4. Каждая направляющая прорезь 19 предпочтительно образует накопительное гнездо 16 для одного заклепочного элемента 4. Эти направляющие прорези 19 обеспечивают предпочтительное заданное по положению удержание заклепочных элементов 4.
Дополнительно или альтернативно промежуточный накопитель 15 имеет упругие элементы 20, предпочтительно упругие зажимные элементы для удержания заклепочных элементов 4. Они могут удерживать с заданным положением заклепочные элементы 4, находящиеся в промежуточном накопителе 15. Здесь и предпочтительно направляющая прорезь 19 и/или накопительное гнездо (место) 16, в частности, упругий элемент 20 могут иметь заходный участок.
Предпочтительно упругий элемент 20 зажимает заклепочный элемент 4 с обеих сторон, как показано на Фиг.8, или, альтернативно, он может зажимать заклепочный элемент 4 с одной стороны. Упругие элементы, в частности, упругие зажимные элементы имеют предпочтительно один, по существу, круглый участок, концы которого продолжаются дальше предпочтительно каждый в форме плеча. Здесь и предпочтительно этот круглый участок охватывает по меньшей мере 180о, предпочтительно по меньшей мере 225о, предпочтительно по меньшей мере 270о.
Промежуточный накопитель 15, соответственно, элемент 17 промежуточного накопителя предпочтительно выполнен слоистым, как показано на Фиг.8. Далее предпочтительно упругий элемент 20, соответственно, упругие элементы 20 удерживаются между двумя слоями 15a, 15b промежуточного накопителя 15, как это показано, например, на подетальном изображении на Фиг.8.
Предпочтительно по меньшей мере один слой 15a выполнен в виде штампованной детали, в частности, в виде штампованной из листа детали. Дополнительно или альтернативно по меньшей мере один слой 15b может быть выполнен в виде фрезерованной детали.
В частности, для точного по положению удержания упругих элементов 20 по меньшей мере один слой 15a, 15b предпочтительно имеет один, в частности, круглый фиксирующий профиль 15c, вдоль которого предпочтительно по меньшей мере на отдельных участках продолжается упругий элемент 20. Фиксирующий профиль 15c предпочтительно выполнен соответствующим круглому участку упругого элемента 20. Фиксирующий профиль 15c проходит дальше предпочтительно по небольшому отрезку дуги как круглого участка упругого элемента 20.
Согласно одному предпочтительному примеру выполнения робот и/или рабочий орган содержат не показанный испытательный блок, предназначенный для определения предварительно заданных свойств заклепочных элементов 4, релевантных для процесса сверления и/или процесса клепки.
Для испытания заклепочных элементов 4 манипулятор 8 может транспортировать заклепочные элементы 4 от устройства 6 выдачи заклепок и/или от промежуточного накопителя 15, и/или от клепального модуля 3 к испытательному блоку и определять, в частности, измерять свойства заклепочных элементов 4, релевантные для процесса сверления и/или процесса клепки. Заклепочные элементы 4 здесь и предпочтительно могут быть заклепками 4a и/или заклепочными кольцами 4b). Предпочтительно захват 10 удерживает заклепочные элементы 4 во время этого определения свойств.
Затем клепальное устройство 1 на основании этих установленных, в частности, измеренных релевантных свойств заклепочного элемента 4 может адаптировать процесс сверления и/или процесс клепки под этот заклепочный элемент 4 и/или по выполненному и при необходимости измеренному сверленому отверстию может выбираться заклепочный элемент 4, подходящий для сверленого отверстия.
Здесь и предпочтительно с помощью испытательного блока измеряются и определяются как заранее заданные, релевантные для процесса сверления и/или процесса клепки свойства: диаметр DK головки заклепки и/или длина LK головки заклепки, и/или угол W потайной головки заклепки, и/или радиус R перехода. Под радиусом R перехода здесь и предпочтительно понимается радиус между двумя участками заклепочного элемента 4, в частности, между головкой 4c и стержнем 4d заклепки. Дополнительно можно при необходимости измерить и диаметр DS стержня. Предпочтительно с помощью испытательного блока проверяется, соответственно, измеряется предпочтительно только один фрагмент заклепочного элемента 4.
Особое значение имеет, в частности, обмер головок 4c заклепочных элементов 4 и подгонка под сверленое отверстие, в частности, раззенковка головки 4c заклепочного элемента 4, соответственно, подбор заклепочного элемента 4 с головкой 4c, подходящей для сверленого отверстия, в частности, раззенковка сверленого отверстия.
В этом отношении, согласно одному особенно предпочтительному варианту выполнения указанный испытательный блок в качестве заранее заданных, релевантных для процесса сверления и/или процесса клепки свойств заклепочных элементов 4 измеряет, например, диаметр головки заклепки и/или длину головки заклепки перед питающей линией к клепальному модулю 3, и затем этот клепальный модуль 3 на основании этого диаметра головки заклепки и/или этой длины головки заклепки выполняет сверление, в частности, определяет глубину раззенковки для сверленого отверстия и выполняет сверление.
Здесь и предпочтительно испытательный блок имеет оптический датчик. С помощью оптического датчика этого испытательного блока определяются заранее заданные, релевантные для процесса сверления и/или процесса клепки свойства. Предпочтительно эти свойства определяются, в частности, измеряются управляющим устройством 21 с помощью этого оптического датчика.
Дополнительно или альтернативно испытательный блок может иметь светотехническое оборудование для измерения указанных заранее заданных свойств, релевантных для процесса сверления и/или процесса клепки, и это оборудование освещает заклепочный элемент 4 во время такого измерения. Указанное светотехническое оборудование здесь и предпочтительно расположено напротив упомянутого датчика испытательного блока. Ось светотехнического оборудования и визирная ось этого оптического датчика расположены при этом предпочтительно коаксиально. Направление визирования датчика и светотехнического оборудования здесь следует ориентировать друг на друга.
В этом примере выполнения испытательный блок выполнен как двухсторонняя телецентрическая система. Это позволяет производить точное измерение без точного позиционирования заклепочного элемента 4 между светотехническим оборудованием и оптоволоконным датчиком.
Здесь и предпочтительно допускаемая погрешность измерения с помощью испытательного блока составляет менее +/-5 мкм, предпочтительно менее +/- 3 мкм, еще более предпочтительно, по существу, около +/- 2 мкм.
Дополнительно или альтернативно клепальное устройство 1, в частности, рабочий орган 2 или робот может содержать не показанную сборную емкость для приема не потребовавшихся заклепочных элементов 4. Предпочтительно манипулятор 8 транспортирует заклепочные элементы 4 от устройства 6 выдачи заклепок и/или от промежуточного накопителя 15, и/или клепального модуля 3 к этой сборной емкости. Предпочтительно эта сборная емкость имеет отверстие, в частности, с розеткой, через которое захват 10 может вводить заклепочные элементы 4 в эту сборную емкость. За счет этого заклепочные элементы 4, больше не требующиеся для следующих этапов обработки, могут от промежуточного накопителя 15 и/или от устройства 6 выдачи заклепок, и/или от клепального модуля 3 подаваться в сборную емкость. Транспортировка заклепочных элементов 4 производится предпочтительно во время перемещения рабочего органа 2 из одной обрабатывающей позиции в другую обрабатывающую позицию.
Здесь и предпочтительно клепальное устройство 1 снабжено управляющим устройством 21, предпочтительно цифровым программным управлением. Далее, манипулятор 8 предпочтительно имеет собственное управляющее устройство 22, в частности, цифровое программное управление, которое через интерфейс 23 коммуницирует с управляющим устройством клепального устройства 1. Таким образом, доступный на рынке манипулятор 8 может быть просто и экономично использован в предлагаемом изобретением заклепочном устройстве 1, соответственно, в предлагаемом изобретением рабочем органе 2.
Подача заклепочного элемента 4 к клепальному модулю 3 предпочтительно происходит за счет того, что захват 10 манипулятора 8 захватывает заклепочный элемент 4 в устройстве 6 выдачи заклепок (см. Фиг.3). После захватывания, соответственно, приема заклепочного элемента 4 посредством захвата 10 манипулятор 8 может за счет перестановки указанной установочной кинематической системы 9 транспортировать заклепочный элемент 4 к клепальному модулю 3 и передавать на клепальный модуль 3, как это показано на Фиг.5, 6 и 7.
Предпочтительно, однако, захват 11 и после захватывания, соответственно, приема заклепочного элемента 4 может путем перестановки указанной установочной кинематической системы 9 транспортировать его к промежуточному накопителю 15 и передавать на этот промежуточный накопитель 15. Из промежуточного накопителя 15 тогда, когда это потребуется, с помощью захвата 10 манипулятора 8 он может быть захвачен и путем перестановки указанной установочной кинематической системы 9 перемещен к клепальному модулю 3 и передан на него.
На Фиг.3 заклепочный элемент 4 с заданным положением удерживается в устройстве 6 выдачи заклепок. К устройству 6 выдачи заклепок подходит манипулятор 8, и захват 10 захватывает заклепочный элемент 4. Здесь и предпочтительно он принимает заклепочный элемент 4 с заданным положением.
После этого манипулятор 8 может перемещать принятый заклепочный элемент 4 или к промежуточному накопителю 15, и/или к клепальному модулю 3. На Фиг.4 показано, как манипулятор 8 передает заклепочный элемент 4 на промежуточный накопитель 15. Для этого захват 10 перемещает заклепочный элемент 4 в направляющую прорезь 19 этого промежуточного накопителя 15. Передача заклепочного элемента 4 на промежуточный накопитель 15 происходит предпочтительно с заданным положением.
Если заклепочный элемент 4, в частности, с заданным положением принят промежуточным накопителем 15, то захват 10 открывается и освобождает заклепочный элемент 10. Захват 10 теперь может подойти к другому накопительному гнезду 20 промежуточного накопителя 15 и принять другой заклепочный элемент 4 с заданным положением или взять следующий заклепочный элемент 4 из устройства 6 выдачи заклепок.
Для подачи заклепочного элемента 4 в клепальный модуль 3 захват 10 здесь и предпочтительно захватывает заклепочный элемент 4 из устройства 6 выдачи заклепок, как показано на Фиг.3, или из промежуточного накопителя 15. После этого здесь и предпочтительно манипулятор 8 перемещает заклепочный элемент 4 из промежуточного накопителя 15 и/или из устройства 6 выдачи заклепок к клепальному модулю 3.
Здесь и предпочтительно захват 10 передает заклепочный элемент 4, в частности, с заданным положением, на клепальный модуль 6, в частности, в держатель 13 заклепки. Предпочтительно при такой передаче захватом 10 продольная ось заклепочного элемента 4 располагается коаксиально с продольной осью держателя 13 заклепки. Только после этого здесь и предпочтительно захват 10 открывается, чтобы передать заклепочный элемент 4 в держатель 13 заклепки.
Эти этапы способа показаны на Фиг.5, 6 и 7. Сначала на Фиг.5 захват 10 показан на небольшом расстоянии перед держателем 13 заклепки. На Фиг.6 показано, как приведены в соответствие продольная ось B держателя заклепки 13 и продольная ось A заклепочного элемента 4. На Фиг.7 показано, как захват 10 открывается, и заклепочный элемент 4 передается в держатель 13 заклепки. Здесь и предпочтительно клепальный модуль 3 затем перемещается в рабочее положение, и клепальный модуль 3 может переместить заклепочный элемент 4 в конструктивный узел 5.
На рабочем органе 2 и/или на клепальном устройстве 1, в частности, на роботе могут быть предусмотрены дополнительные манипуляторы 8 для перемещения заклепочного элемента 4 вышеописанным образом, в частности, от устройства 6 выдачи заклепок к клепальному модулю 3. Вышеописанные варианты выполнения манипулятора 8 аналогичным образом действительны и для другого манипулятора 8, так что в отношении этого можно сослаться на вышеописанные варианты выполнения.
Рабочий орган 2 и/или клепальное устройство 1 предпочтительно выполнены и оснащены таким образом, что рабочий орган 2, соответственно, клепальное устройство 1 могут осуществлять вышеописанные этапы способа.
И наконец, на Фиг.9 в качестве примера заклепочных элементов показаны: на a) цельная заклепка с потайной головкой, а на b) призонная заклепка с потайной головкой, и заклепочное кольцо, корреспондирующее с призонной заклепкой. Кроме того, в клепальный модуль 3 с помощью манипулятора 8 могут подаваться и многие другие заклепочные элементы 4. В частности, это могут быть также резьбовые заклепки и/или заклепки для клепки без поддержки.
Для показанных на Фиг.9 заклепочных элементов 4 в качестве примера представлены возможные свойства, релевантные для процесса сверления и/или процесса клепки, причем их выбор может зависеть от требований к создаваемому заклепочному соединению. Этими релевантными свойствами здесь и предпочтительно задаются длина LN заклепки и/или длина Ls стержня, и/или длина LK головки, и/или диаметр DK головки, и/или диаметр Ds стержня. Далее, в качестве возможных свойств, релевантных для процесса сверления и/или процесса клепки, указаны угол W потайной головки, а также радиус R перехода. Кроме того, на Фиг.9b показана заклепочная структура, а именно запорные кольцевые проточки 4e призонной заклепки.
Для заклепочного кольца 3b здесь в качестве релевантных для процесса клепки свойств показаны длина LC заклепочного кольца, а также внутренний диаметр DCI заклепочного кольца и внешний диаметр DCA заклепочного кольца.
Машина для укладки волокон и способ изготовления волокнистых нетканых матов
Способ работы устройства автоматизации
Устройство для изготовления заготовок
Установка для обработки структурных элементов самолета
Устройство фиксации для тестового листа
Способ навертывания замыкающего кольца на резьбовой стержень
Способ компенсации отклонения рабочей точки
Манипулятор с рукой
Система изготовления
Машина для укладки волокон
Центрирующее приспособление для носителя конструктивного элемента и способ центрирования и фиксации центрирующей оправки
Способ наполнения кассеты для заклепок заклепочными элементами
Способ наполнения кассеты для заклепок заклепочными элементами

