Результат интеллектуальной деятельности: СПОСОБ И КОМПЛЕКС ОЦЕНКИ НА ПОЛУНАТУРНОЙ МОДЕЛИ ЭФФЕКТИВНОСТИ РАДИОПОДАВЛЕНИЯ РАДИОЛОКАЦИОННОЙ ГОЛОВКИ САМОНАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ
Вид РИД
Изобретение
Предлагаемый способ и комплекс оценки на полунатурной модели эффективности радиоподавления радиолокационной головки самонаведения (РГС) управляемой ракеты (УР) относится к области полунатурного моделирования функционирования и оценки эффективности
радиоэлектронных средств (РЭС) и может быть использован при разработке и испытаниях адаптивных средств и комплексов радиоэлектронного подавления (РЭП), применяемых для защиты объектов от поражения наводящимися на них УР с РГС.
Известны способы и комплексы оценки на полунатурной модели эффективности радиоподавления реальной РГС УР с использованием динамического стенда (см., например, книгу Петрова Г.М. и др. «Методы моделирования систем управления на аналоговых и аналогово-цифровых вычислительных машинах», М., Машиностроение, 1975, с. 189-193; изобретение по авторскому свидетельству №76127 с приоритетом от 11 ноября 1968 по классу G06G 7/78 «Устройство для моделирования контура управления ракетой с реальной РГС»), позволяющие моделировать воздействие помех, создаваемых комплексами РЭП, на реальные РГС, входящие в состав контуров наведения атакующих УР, и проводить выбор вида и параметров помех комплексов РЭП по результатам оценки эффективности этого воздействия на реальные РГС.
Из известных способов и комплексов оценки на полунатурной модели эффективности радиоподавления РГС УР наиболее близкой по своей сущности является способ и комплекс моделирования контура наведения УР в условиях воздействия помех на РГС контура наведения ракеты (см., например, кандидатскую диссертацию Понамарева М.В. Исследование вопросов построения смешанных моделей для испытаний на помехозащищенность радиолокационных головок самонаведения зенитных управляемых ракет, г. Воронеж, 1974 г). Данный способ полунатурного моделирования включает формирование и излучение высокочастотных сигналов цели и помех в пространство безэховой камеры с использованием излучателей сигналов и помех, установленных в безэховой камере на антенном стенде с возможностью перемещения в угломестной и азимутальной плоскостях, прием, обработку излучаемых высокочастотных сигналов и определение угловой скорости цели в помехах радиолокационной головкой самонаведения ракеты, расположенной в безэховой камере, проведение с использованием угловой скорости цели расчетов на математической модели контура наведения ракеты координат ракеты, цели, и помехи, изменение углового положения на антенном стенде излучателей высокочастотных сигналов цели и помехи и мощности высокочастотных сигналов цели и помехи в соответствии с их рассчитанными координатами. Данный комплекс моделирования контура наведения ракеты содержит имитаторы высокочастотных сигналов цели и помех, соединенные с размещенными в безэховой камере подвижными излучателями сигналов динамического антенного стенда, оснащенного приводом, реальную РГС, размещенную в безэховой камере, модель контура наведения ракеты, при этом вход модели контура наведения ракеты соединен с выходом датчика угловой скорости антенны РГС, первый и второй выходы модели контура наведения ракеты соединены с управляющими входами привода, обеспечивающего угловое перемещение по динамическому антенному стенду излучателей цели и помехи соответственно, третий и четвертый выходы модели контура наведения ракеты соединены с входами высокочастотного имитатора сигналов цели и помехи соответственно.
Этот способ и комплекс являются наиболее близкими по технической сущности к заявляемым изобретениям.
В настоящее время приобретают применение адаптивные комплексы создания помех, использующие информацию о траектории полета ракеты, атакующей защищаемый объект, для выбора вида и параметров помех этой ракете (см., например, книгу Перунов Ю., М., Фомичев К., И., Юдин Л., М. Радиолокационное подавление информационных каналов систем управления оружием / Под ред. Ю., М. Перунова. - М.: «Радиотехника», 2003; с. 268).
Известные способ и комплекс оценки на полунатурной модели эффективности радиоподавления РГС УР имеют существенный недостаток. Оценка эффективности адаптивных комплексов РЭП методом полунатурного моделирования с использованием известных способа и комплекса приводит к существенным материальным и временным затратам и не обладает приемлемой точностью, а в ряде случаев невозможна. Это обусловлено следующими факторами.
Создание адаптивной помехи подразумевает необходимость подстройки во времени параметров помехи под параметры подавляемой помехой РГС управляемой ракеты. Поэтому в процессе оценки эффективности адаптивных комплексов радиоподавления управляемой ракеты с использованием известных способа и комплекса необходимо наряду с оценкой эффективности радиоподавления осуществлять выбор вида и параметров адаптивных помех, обеспечивающих максимальную эффективность радиоподавления. Выбор вида и параметров адаптивных помех с использованием известных способа и комплекса можно осуществить лишь методом переборов путем многократного проведения полунатурного моделирования для различных видов и дискретных значений параметров помех и выбора из результатов моделирования варианта, обеспечивающего максимальную эффективность применения помех.
В общем случае контур наведения управляемой ракеты является нестационарным. Ранее параметры помех не связывались с нестационарностью контура наведения управляемой ракеты. Информация о текущих параметрах контура наведения управляемой ракеты не использовалась. Поэтому нестационарность контура наведения не оказывала влияния на изменение параметров помех во времени и на эффективность помех в целом. Параметры помех выбирались исходя из априорных усредненных данных о контурах наведения ракет, и не изменялись в процессе радиоподавления таких контуров. Кроме того, при подстройке параметров помех во времени под параметры подавляемого контура возникает последействие, вызванное влиянием результатов определения параметров помех, полученных на предыдущих шагах, на параметры помех, полученные на последующих шагах. Учет этого последействия приводит к необходимости дискретизации процесса выбора не только по параметрам помех, но и по времени. Поэтому при выборе параметров адаптивных помех известными способами и комплексами существенно (на несколько порядков) возрастает объем полунатурного моделирования. В общем случае оценить шаг дискретизации и объем полунатурного моделирования при адаптивном выборе параметров помех не представляется возможным.
Объем вычислений в этом случае можно сократить лишь за счет увеличения шага дискретизации либо по параметрам помех, либо по времени. В обоих случаях это приводит к ухудшению точности выбора параметров помех и точности оценки эффективности адаптивных комплексов РЭП в целом.
Техническим результатом, на достижение которого направлено данное изобретение, является повышение точности оценки эффективности адаптивных комплексов РЭП методом полунатурного моделирования, а также сокращение временных затрат на проведение полунатурного моделирования.
Технический результат достигается тем, что в известном способе оценки на полунатурной модели эффективности радиоподавления управляемой ракеты, основанном на формировании и излучении сигналов цели и помехи с помощью подвижных излучателей, измерении координат цели с использованием реальной радиолокационной головки самонаведения, расчете на математической модели контура наведения координат управляемой ракеты, цели и помехи, управлении положением подвижных излучателей сигналов цели и помехи в соответствии с их рассчитанными координатами, оценке эффективности радиоподавления по величине промаха управляемой ракеты, управляют в соответствии с рассчитанными координатами управляемой ракеты положением дополнительного подвижного излучателя, излучают с его использованием сигналы на частоте, находящейся за пределами полосы пропускания радиолокационной головки самонаведения управляемой ракеты, принимают эти сигналы дополнительным приемником и определяют по ним координаты управляемой ракеты, провоцируют управляемую ракету на изменение координат путем излучения помехи с известными характеристиками, рассчитывают по измеренным координатам управляемой ракеты параметры математической модели контура наведения управляемой ракеты, оценивают на математической модели контура наведения, наделенной рассчитанными параметрами, эффективность имеющихся видов радиопомех, определяют вид и параметры радиопомехи, имеющей максимальную эффективность радиоподавления, формируют и излучают в направлении радиолокационной головки самонаведения радиопомеху с максимальной эффективностью.
Технический результат достигается тем, что, в известном комплексе оценки на полунатурной модели эффективности радиоподавления РСГ управляемой ракеты, содержащем формирователи высокочастотных сигналов цели и помех, соединенные с размещенными в безэховой камере излучателями сигналов, установленными на антенном стенде с возможностью перемещения в угломестной и азимутальной плоскостях, радиолокационную головку самонаведения, размещенную в безэховой камере, математическую модель контура наведения ракеты, при этом вход математической модели контура наведения ракеты соединен с выходом радиолокационной головки самонаведения, первый и второй выходы математической модели контура наведения ракеты соединены с управляющими входами антенного стенда, обеспечивающими угловое перемещение излучателей сигналов цели и помехи соответственно, третий и четвертый выходы математической модели контура наведения ракеты соединены с первым входом высокочастотного формирователя сигналов помехи и цели соответственно, дополнительно введены высокочастотный формирователь сигналов атакующей ракеты, соединенный с подвижным излучателем, размещенным на антенном стенде, последовательно соединенные специализированный измеритель фазовых координат ракеты, блок оценки параметров прогнозной модели контура наведения ракеты, а также блок управления адаптивными помехами радиолокационной головке самонаведения, при этом пятый выход математической модели контура наведения ракеты соединен с третьим управляющим входом антенного стенда, обеспечивающим угловое перемещение по антенному стенду излучателя сигналов движения атакующей ракеты, шестой выход математической модели контура наведения ракеты соединен с входом высокочастотного формирователя сигнала движения атакующей ракеты, а выход блока управления адаптивными помехами радиолокационной головки самонаведения соединен со вторым входом высокочастотного формирователя помехи.
Сущность предлагаемого способа и комплекса оценки на полунатурной модели эффективности радиоподавления РГС управляемой ракеты состоит в том, что по результатам моделирования контура наведения ракеты формируют и излучают в пространство высокочастотные сигналы атакующей ракеты, осуществляют с использованием дополнительного приемника прием, обработку излучаемых высокочастотных сигналов ракеты и определяют по ним координаты ракеты, а затем и параметры математической модели контура наведения ракеты, оценивают на математической модели контура наведения, наделенной рассчитанными параметрами, эффективность имеющихся видов радиопомех, определяют вид и параметры радиопомехи, имеющей максимальную эффективность радиоподавления, формируют и излучают в направлении радиолокационной головки самонаведения радиопомеху с максимальной эффективностью. Использование математической модели контура наведения ракеты с параметрами контура наведения атакующей ракеты позволяет перевести задачу выбора параметров адаптивных помех из области многократного проведения полунатурного моделирования для различных видов и дискретных значений параметров помех в область математического моделирования путем параметрического поиска с использованием математической модели контура наведения, параметры которой соответствуют характеристикам атакующей управляемой ракеты. Тем самым осуществляется повышение точности выбора параметров помех и точности оценки эффективности адаптивных комплексов РЭП в целом, а также сокращение временных и материальных затрат на проведение полунатурного моделирования.
Сущность предлагаемого комплекса оценки на полунатурной модели эффективности радиоподавления управляемой ракеты состоит в дополнительном введении в состав известного комплекса полунатурного моделирования формирователя и излучателя сигналов движения атакующей ракеты, воспроизводящих по информации от модели контура наведения ракеты угловое перемещение по антенному стенду излучателя сигналов атакующей ракеты и излучение в безэховую камеру сигналов атакующей ракеты, а также специализированного измерителя фазовых координат атакующей ракеты, позволяющего обнаруживать сигналы и измерять координаты атакующей ракеты, блока оценки параметров математической модели контура наведения атакующей ракеты, позволяющего по измеренным фазовым координатам атакующей ракеты, отрабатывающей известное возмущающее воздействие, оценить параметры математической модели контура наведения атакующей ракеты, а также блока формирования помех, позволяющего выбирать характеристики адаптивных помех РГС атакующей ракеты с использованием оценок параметров математической модели контура наведения ракеты.
Применение способа начинается с установки начальных условий моделирования. Устанавливают, например, на антенном стенде, расположенном в безэховой камере, угловое положение излучателей высокочастотных сигналов цели и помех, соответствующее исходному началу моделирования.
Формируют, например, с помощью имитаторов высокочастотных сигналов, высокочастотные сигналы цели и излучают их с использованием излучателей высокочастотных сигналов в пространство безэховой камеры. Осуществляют прием и обработку излучаемых высокочастотных сигналов и определяют угловую скорость цели, используя в качестве измерителя координат атакующей ракеты, например, радиолокационную головку самонаведения ракеты, расположенную в безэховой камере. Рассчитывают с использованием угловой скорости цели численными методами на математической модели контура наведения ракеты, реализующей, например, метод пропорциональной навигации наведения ракеты на цель, координаты цели и ракеты во времени. По мере изменения координат цели и ракеты осуществляют изменение углового положения на антенном стенде излучателей высокочастотных сигналов цели и мощности высокочастотных сигналов цели в соответствии с их рассчитанными координатами.
На этом же антенном стенде устанавливают угловое положение подвижного излучателя высокочастотных сигналов ракеты в соответствии с координатами ракеты на момент начала моделирования. С использованием координат ракеты, рассчитанных на математической модели контура наведения ракеты, формируют и излучают посредством излучателей высокочастотных сигналов ракеты в пространство безэховой камеры высокочастотные сигналы атакующей ракеты в диапазоне длин волн, отличном от диапазона работы радиолокационной головки самонаведения ракеты. Осуществляют с использованием дополнительного приемника прием, обработку излучаемых высокочастотных сигналов и определение по ним координат ракеты. Провоцируют управляемую ракету на изменение координат, например, путем излучения помехи с известными характеристиками с использованием имитаторов высокочастотных сигналов помехи. Рассчитывают по измеренным координатам ракеты, отрабатывающей известное помеховое воздействие, параметры математической модели контура наведения ракеты по мгновенному промаху. С использованием полученных параметров рассчитывают на математической модели контура наведения ракеты в сжатом масштабе времени величину мгновенного промаха ракеты относительно защищаемого объекта для различных видов и дискретных значений параметров помех. Выбирают вид и параметры помех, обеспечивающие максимальное значение величины мгновенного промаха ракеты. Устанавливают при проведении дальнейшего моделирования, например, с использованием имитаторов сигналов помех, полученные вид и параметры адаптивных помех.
Осуществление способа. Предлагаемый способ оценки на полунатурной модели эффективности радиоподавления управляемой ракеты может быть реализован путем выполнения следующей последовательности действий.
Установку в безэховой камере на антенном стенде подвижного излучателя высокочастотных сигналов ракеты, а также формирование и излучение в пространство безэховой камеры высокочастотных сигналов атакующей ракеты в соответствии с координатами ракеты, рассчитанными на математической модели контура наведения ракеты, можно осуществить, например, с использованием рупорного излучателя высокочастотных сигналов соединенного с имитатором высокочастотных сигналов (см., например, кандидатскую диссертацию Понамарева М.В. Исследование вопросов построения смешанных моделей для испытаний на помехозащищенность радиолокационных головок самонаведения зенитных управляемых ракет, г. Воронеж, 1974 г).
Прием, обработку излучаемых высокочастотных сигналов ракеты в безэховой камере и определение по ним координат ракеты можно осуществить с использованием в качестве дополнительного приемника, например, головки самонаведения ракеты Р-27 (см., например, книгу: Бортовой комплекс самолетовождения, прицеливания и управления вооружением самолета Су-27. Под ред. М.С. Ярлыкова. - М.: «Издание ВВИА им. Проф. Н.Е. Жуковского», 1987. - с. 156).
Провоцирующее воздействие на управляемую ракету, вызывающее изменение ее координат, можно осуществить путем излучения помехи с известными характеристикам, например, с использованием имитатора высокочастотных сигналов помех, соединенного с подвижным излучателем высокочастотных сигналов помехи, установленным на антенном стенде (см., например, кандидатскую диссертацию Понамарева М.В. Исследование вопросов построения смешанных моделей для испытаний на помехозащищенность радиолокационных головок самонаведения зенитных управляемых ракет, г. Воронеж, 1974 г). При этом подвижный излучатель высокочастотных сигналов помехи должен быть установлен относительно углового положения излучателя высокочастотных сигналов цели со сдвигом на величину угла, не превышающую полвины ширины диаграммы направленности антенны РГС атакующей ракеты. Включение провоцирующего воздействия помех осуществляют с задержкой по времени, необходимой на оценку координат ракеты и определения факта наведения ракеты на защищаемую цель. Сигнал от цели, суммируется в пространстве безэховой камеры с сигналами передатчика помех. В этом случае радиолокационная головка управляемой ракеты будет сопровождать энергетический центр сложной цели, состоящей из сигналов цели и передатчика помех, а управляемая ракета будет осуществлять наведение на этот энергетический центр. Мощность излучения помех передатчика помех, как правило, существенно превышает мощность излучения сигналов цели. Поэтому в момент включения передатчика помех положение энергетического центра сложной излучающей цели, состоящей из сигналов цели и передатчика помех, скачком изменится и будет практически совпадать с угловым положением излучающего передатчика помех (см., например, Ю.М. Перунов, К.И. Фомичев, Л.М. Юдин. Радиоэлектронное подавление информационных каналов систем управления оружием. М., Радиотехника, 2003 г, с. 230). Управляемая ракета за счет изменения углового положения энергетического центра сложной излучающей цели переводится в переходный режим работы по отработке системой автоматического управления ракеты ступенчатого возмущающего воздействия.
Определение параметров математической модели контура наведения ракеты по мгновенному промаху может быть осуществлено в соответствии с алгоритмом (см. например, книгу: Козлов С.В., Карпухин В.И., Лазаренков С.М. Модели конфликта авиационных систем радиоэлектронной борьбы и противовоздушной обороны. Монография. - Воронеж: ВУНЦ ВВС «ВВА». 2013. - с. 341). Практическая реализация данного алгоритма может представлять собой, например, программу расчетов на ПЭВМ.
Проведение расчетов в сжатом масштабе времени величины мгновенного промаха ракеты относительно защищаемого объекта для различных видов и параметров помех с использованием математической модели контура наведения ракеты можно осуществить в соответствии с алгоритмом (см., например, книгу: Быков В.В. Цифровое моделирование в статистической радиотехнике. - М.: «Советское радио», 1971 - с. 248).
Выбор вида и параметров помех можно осуществить путем перебора по видам помех и поиска на математической модели контура наведения ракеты внутри вида параметров помех, обеспечивающих максимальное значение величины мгновенного промаха ракеты. При этом использование математической модели контура наведения позволяет осуществить выбор параметров помех с использованием математических методов поиска экстремумов функций одной или нескольких переменных. Так, например, искомыми параметрами являются:
при постановке мерцающих помех - моменты переключения передатчиков помех;
при постановке когерентных помех - соотношения амплитуд в каналах создания помех;
при использовании выбрасываемых передатчиков помех - моменты их выброса.
Алгоритмы поиска параметров адаптивных помех для различных видов помех могут существенно отличаться друг от друга, однако все эти алгоритмы основаны на расчетах мгновенного промаха ракеты с использованием прогнозной модели контура наведения ракеты и поиске значения адаптивного параметра, соответствующего максимальному значению величины мгновенного промаха ракеты.
Выбор параметров помех может быть практически реализован в отдельном блоке электронной вычислительной машины комплекса полунатурного моделирования, осуществляющем поиск экстремумов функции методом интерполяции и численного дифференцирования (см., например, В.П. Дьяконов. Справочник по алгоритмам и программам на языке бейсик для персональных ЭВМ. М., Наука, 1987 г, с. 96, 100).
Далее выбранные параметры адаптивных помех устанавливают при проведении дальнейшего моделирования, например, в имитаторе сигналов помех.
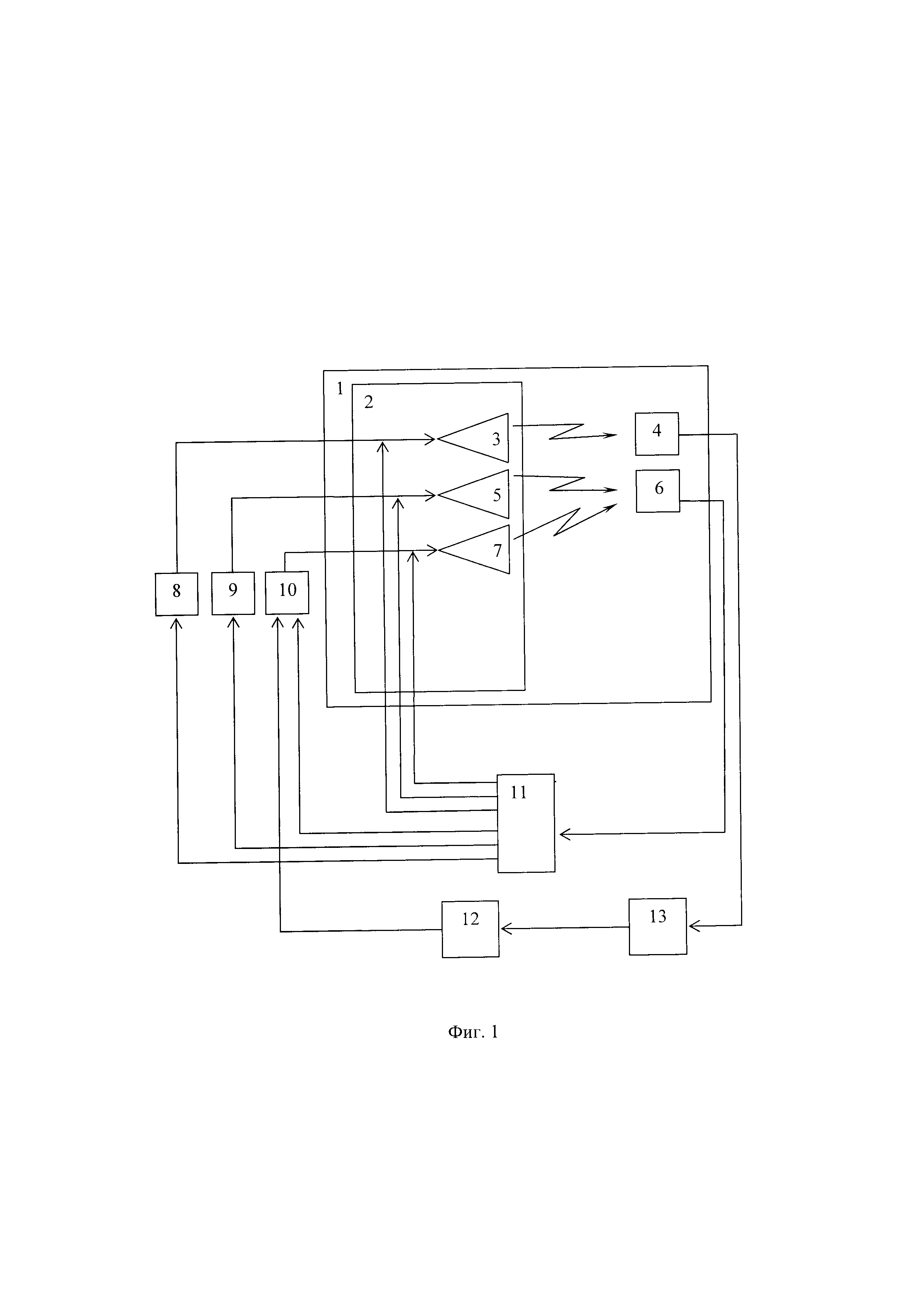
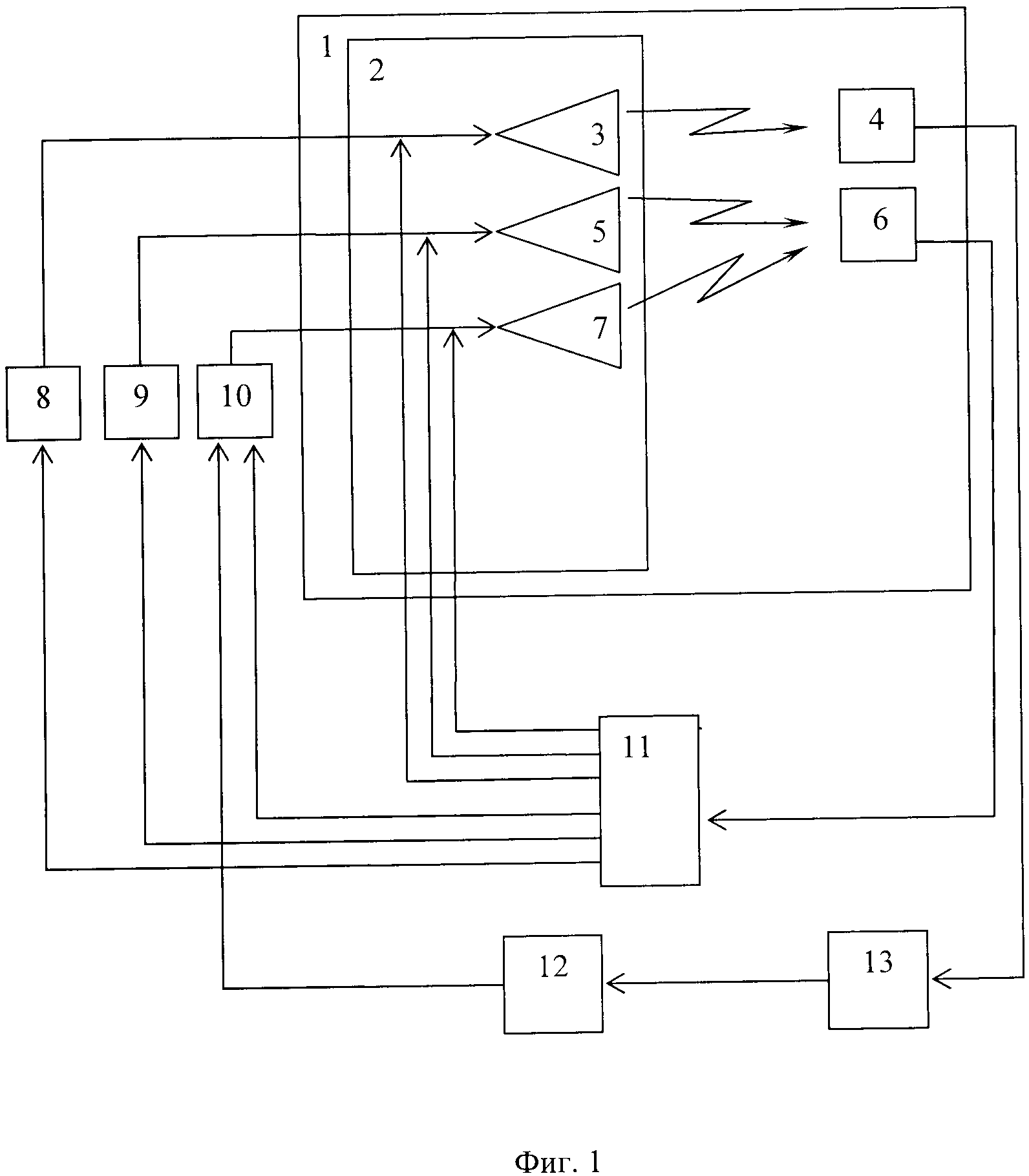
На фиг. 1 представлена структурная схема комплекса оценки на полунатурной модели эффективности радиоподавления управляемой ракеты, с использованием которого может быть реализован предлагаемый способ. На структурной схеме цифрами обозначены: 1 - безэховая камера; 2 - антенный стенд; 3 - подвижный излучатель отраженных сигналов атакующей ракеты; 4 - специализированный измеритель координат ракеты; 5 - подвижный излучатель сигналов цели; 6 - радиолокационная головка самонаведения ракеты; 7 - подвижный излучатель сигналов помехи; 8 - высокочастотный формирователь сигналов атакующей ракеты; 9 - высокочастотный формирователь сигналов цели; 10 - высокочастотный формирователь сигналов помехи; 11 - математическая модель контура наведения ракеты; 12 - блок управления адаптивными помехами радиолокационной головке самонаведения; 13 - блок оценки параметров математической модели контура наведения ракеты.
По существу предлагаемый комплекс полунатурного моделирования представляет собой многоконтурную установку, позволяющую:
моделировать процесс наведения ракеты, оснащенной РГС, на цель в условиях применения помех для ее прикрытия, так же, как это осуществлялось в ранее известных устройствах;
дополнительно, применительно к ранее известным устройствам, воспроизводить с использованием информации от модели контура наведения ракеты процесс углового перемещения по антенному стенду подвижного излучателя сигналов атакующей ракеты при наведении ракеты на цель, характер изменения во времени сигналов атакующей ракеты, а также процесс обнаружения атакующей ракеты с использованием специализированного измерителя фазовых координат атакующей ракеты и измерения координат и параметров сигналов атакующей ракеты;
а также дополнительно осуществлять оценки параметров математической модели контура наведения ракеты с использованием результатов измерений координат атакующей ракеты и выбор характеристик адаптивных помех РГС атакующей ракеты с использованием оценок параметров математической модели контура наведения ракеты.
Назначение большинства отдельных блоков комплекса полунатурного моделирования, приведенных на фиг. 1, следует непосредственно из их названия, за исключением блоков 12 и 13. Блок оценки параметров математической модели контура наведения ракеты 13 предназначен для получения оценок параметров математической модели контура наведения ракеты на основе результатов измерения координат атакующей ракеты специализированным измерителем и использования оценок параметров этой модели для оценки эффективности применения помех. Блок управления адаптивными помехами радиолокационной головке самонаведения 12 предназначен для выбора с использованием математической модели контура наведения ракеты значения изменяемого (адаптивного) параметра помех, обеспечивающего максимальную эффективность воздействия помех, и ввода полученного оптимального значения в формирователь сигналов помех.
В исходном состоянии в безэховой камере 1 установлены антенный стенд 2 с расположенными на нем с возможностью перемещения подвижными излучателями сигналов атакующей ракеты 3, цели 5 и помехи 7, а также специализированный измеритель координат атакующей ракеты 4 и радиолокационная головка самонаведения ракеты 6. Излучатели отраженных сигналов атакующей ракеты 3, цели 5 и помехи 7 соединены с высокочастотными формирователями сигналов ракеты 8, цели 9, помехи 10 соответственно. Радиолокационная головка самонаведения 6 соединена посредством электрической связи с математической моделью контура наведения ракеты 11. При этом выходы 1, 2, 3 математической модели контура наведения ракеты 11 соединены с входами управляющими входами антенного стенда. Выходы 4, 5, 6 математической модели контура наведения ракеты 11 соединены с входами высокочастотных формирователей сигналов цели 9, помехи 10 и ракеты 8 соответственно. В свою очередь выходы высокочастотных формирователей соединены электрической связью с подвижными излучателями сигналов ракеты 3, цели 5 и помехи 7. Выход специализированного измерителя координат атакующей ракеты 4 соединен с входом блока оценки параметров математической модели контура наведения ракеты 13, выход которого соединен со входом блока управления адаптивными помехами радиолокационной головке самонаведения 12. Выход блока 12 соединен посредством электрической связи с первым входом высокочастотного формирователя сигналов помехи 10.
Комплекс оценки на полунатурной модели эффективности радиоподавления управляемой ракеты работает следующим образом. В исходном состоянии в безэховой камере 1 на антенном стенде 2 установлены с заданными начальными условиями подвижные излучатели сигналов ракеты 3, цели 5 и помехи 7. По команде на включение комплекса полунатурного моделирования высокочастотные формирователи сигналов ракеты 8 и цели 9 вырабатывают сигналы, которые посредством излучателей 3 и 5 излучаются в объем безэховой камеры 1. Частотный диапазон работы высокочастотного формирователя сигналов ракеты 8 и специализированного измерителя фазовых координат атакующей ракеты 4 выбран с разносом по частоте с частотным диапазоном работы высокочастотного формирователя сигналов цели 9, высокочастотного формирователя сигналов помехи 10 и радиолокационной головки самонаведения 6. Это позволило исключить их взаимное влияние на работу друг друга при работе в общей безэховой камере.
Радиолокационная головка самонаведения ракеты 6 захватывает излучаемый сигнал цели на сопровождение и в процессе его сопровождения определяет координаты излучаемой цели, а также угловую скорость перемещения излучаемой цели относительно РГС. Информация об угловой скорости перемещения цели передается в математическую модель контура наведения ракеты 11, где в соответствии с методом, например, пропорциональной навигации осуществляется наведение ракеты на излучающую цель. В математической модели контура наведения ракеты 11 на каждом шаге моделирования по времени рассчитываются координаты цели и ракеты. При этом информация об изменении угловых координатах цели, ракеты и помехи с выходов 1..3 математической модели контура наведения ракеты с целью передается в антенный стенд для коррекции взаимного углового положения излучателей цели 5, ракеты 3 и помехи 7. Антенный стенд перемещает подвижные рупорные излучатели 3, 5 и 7 по углу места и азимуту в соответствии с произошедшими изменениями их угловых координат. Информация об изменении координат цели и ракеты с выходов 4..6 математической модели контура наведения ракеты 11 передается в формирователи высокочастотных сигналов 8, 9, 10, где производится коррекция мощности излучаемых сигналов в соответствии с изменением дальности между ракетой и целью.
Специализированный измеритель 4 также осуществляет обзор пространства безэховой камеры 1 и захватывает на сопровождение сигнал излучателя ракеты 3. В исходном состоянии угловое положение излучателя помехи на динамическом антенном стенде устанавливается относительно излучателя сигналов цели с разницей на известную величину, меньшую половины ширины диаграммы направленности антенны РГС. С задержкой по времени, необходимой на оценку координат ракеты и определения факта наведения ракеты на защищаемую цель, происходит включение помех. Сигнал от цели, излучаемый подвижным излучателем 5, суммируется в пространстве безэховой камеры 1 с сигналами передатчика помех. В этом случае РГС 6 самонаводящейся ракеты будет сопровождать энергетический центр сложной цели, состоящей из сигналов излучающего рупора цели 5 и передатчика помех 7, а атакующая ракета будет осуществлять наведение на этот энергетический центр. Мощность излучения помех передатчика помех 7 существенно превышает мощность излучения сигналов цели 5. Поэтому в момент включения передатчика помех 7 положение энергетического центра сложной излучающей цели, состоящей из сигналов излучающего рупора цели 5 и передатчика помех, скачком изменится и будет практически совпадать с угловым положением излучающего передатчика помех (см., например, Ю.М. Перунов, К.И. Фомичев, Л.М. Юдин. Радиоэлектронное подавление информационных каналов систем управления оружием. М., Радиотехника, 2003 г, с. 230). Атакующая ракета за счет изменения углового положения энергетического центра сложной излучающей цели переводится в переходный режим работы по отработке системой автоматического управления ракеты ступенчатого возмущающего воздействия. По результатам сопровождения энергетического центра сложной цели специализированным измерителем 4 после отработки ступенчатого возмущающего воздействия в блоке 13 осуществляется построение переходной характеристики контура наведения УР по мгновенному промаху.
Под мгновенным промахом ракеты в данном случае понимается проекция линии "ракета-цель" на плоскость, перпендикулярную вектору скорости сближения ракеты с целью, и проходящую через цель. Структура математической модели контура наведения ракеты по мгновенному промаху для метода пропорциональной навигации определена в (см., например, В.В. Быков, Ю.С. Сухоруков. Точность радиолокационного самонаведения в условиях блужданий центра излучения и маневра цели / Современная радиоэлектронная борьба. Вопросы методологии. Под ред. заслуженного деятеля науки РФ. В.Г. Радзиевского. М., Радиотехника). С использованием величины максимума амплитуды переходной характеристики и времени его достижения в 13 осуществляется оценка параметров математической модели контура наведения ракеты путем решения дифференциального уравнения, описывающего изменение мгновенного промаха ракеты для известной структуры прогнозной модели (см. например, книгу: Козлов С.В., Карпухин В.И., Лазаренков С.М. Модели конфликта авиационных систем радиоэлектронной борьбы и противовоздушной обороны. Монография. - Воронеж: ВУНЦ ВВС «ВВА». 2013. - с. 341).
В блоке 12 осуществляется выбор видов и параметров адаптивных помех РГС УР. Алгоритмы поиска параметров адаптивных помех для различных видов помех могут существенно отличаться друг от друга, однако все эти алгоритмы основаны на расчетах мгновенного промаха ракеты с использованием математической модели контура наведения ракеты. При этом выбор вида помех осуществляется путем перебора из возможных видов создания помех, а выбор параметров внутри одного вида помех осуществляется с использованием математической модели контура наведения путем параметрического поиска параметров помех, обеспечивающих максимальную эффективность их применения. Далее выбранные параметры адаптивных помех передаются в формирователь помех 7, где они устанавливаются и адаптивные помехи излучаются в пространство безэховой камеры 1. Так происходит выбор вида и параметров адаптивных помех с приемлемой точностью.
Для реализации изобретения могут быть использованы типовые радиоэлектронные узлы и устройства, за исключением, специализированного измерителя координат ракеты 4, блока оценки параметров математической модели контура наведения ракеты 13, блока управления адаптивными помехами радиолокационной головке самонаведения 12.
Безэховая камера 1, антенный стенд 2, подвижные излучатели сигналов (ракеты 3, цели 5, помехи 7), высокочастотные формирователи сигналов (ракеты 8, цели 9, помехи 10) могут быть выполнены в соответствии с (см., например, кандидатскую диссертацию Понамарева М.В. Исследование вопросов построения смешанных моделей для испытаний на помехозащищенность радиолокационных головок самонаведения зенитных управляемых ракет, г. Воронеж, 1974 г).
Математическая модель контура наведения управляемой ракеты может быть выполнена в соответствии с (см., например, кандидатскую диссертацию Понамарева М. В. Исследование вопросов построения смешанных моделей для испытаний на помехозащищенность радиолокационных головок самонаведения зенитных управляемых ракет, г. Воронеж, 1974 г).
Специализированный измеритель фазовых координат ракеты 4 может быть выполнен с использованием радиолокационной головки самонаведения типа Р-27Р (см., например, Бортовой комплекс самолетовождения, прицеливания и управления вооружением самолета Су-27/ учебное пособие под редакцией М.С. Ярлыкова, Военно-воздушная инженерная орденов Ленина и Октябрьской революции Краснознаменная академия имени профессора Н.Е. Жуковского, 1987 г., с. 9).
В основу построения блока оценки параметров математической модели контура наведения ракеты (блок 13) положена структурная схема прогнозной модели контура наведения УР с выходом по мгновенному промаху (см., например, В.В. Быков, Ю.С. Сухоруков. Точность радиолокационного самонаведения в условиях блужданий центра излучения и маневра цели / Современная радиоэлектронная борьба. Вопросы методологии. Под ред. заслуженного деятеля науки РФ. В.Г. Радзиевского. М., Радиотехника, 2006), а также алгоритм оценки параметров математической модели контура наведения ракеты (см. например, книгу: Козлов С.В., Карпухин В.И., Лазаренков С.М. Модели конфликта авиационных систем радиоэлектронной борьбы и противовоздушной обороны. Монография. - Воронеж: ВУНЦ ВВС «ВВА». 2013. - с. 341).
В основу построения блока управления адаптивными помехами радиолокационной головке самонаведения 12 положен алгоритм поиска экстремумов функции методом интерполяции и численного дифференцирования (см., например, В.П. Дьяконов. Справочник по алгоритмам и программам на языке бейсик для персональных ЭВМ. М., Наука, 1987 г, с. 96, 100).
Таким образом, для реализации изобретения могут быть использованы типовые радиоэлектронные узлы и устройства, а также нетиповые, практическая реализация которых подготовлена существующим математическим аппаратом и существующими образцами. Поэтому предлагаемое техническое решение является практически реализуемым.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений неизвестен способ и комплекс оценки на полунатурной модели эффективности радиоподавления управляемой ракеты. Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует заявленная последовательность действий и заявляемое устройство.
Способ определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата
Способ управления приемниками воздушного давления
Способ определения расстояния до неподвижного источника излучения движущимся пеленгатором
Способ формирования маршрута носителя пеленгатора
Устройство адаптивной маскировки объектов
Способ определения дальности до неподвижного источника излучения движущимся пеленгатором
Фазовый пеленгатор
Способ буксировки самолетов с использованием малогабаритного буксировщика с дистанционным управлением
Способ измерения задержки радиосигналов
Способ амплитудного двухмерного пеленгования
Устройство для ввода сыпучих материалов в горизонтальный трубопровод всасывающей пневмотранспортной установки
Система управления камерой сгорания изменяемой геометрии газотурбинного двигателя летательного аппарата
Устройство для измерения коэффициента усиления антенн в натурных условиях
Способ измерения многосигнальной избирательности приемника прямого преобразования
Способ защиты мобильных объектов от радиолокационных средств разведки и наведения оружия
Устройство для удаления воздуха из рабочей жидкости закрытых гидравлических систем воздушных судов
Способ транспортировки авиационных грузов
Способ уничтожения воздушной цели зенитными управляемыми ракетами
Способ управления основной камерой сгорания газотурбинного двигателя
Способ формирования характеристики преобразования частоты в напряжение

