Результат интеллектуальной деятельности: СПОСОБ КОМПЕНСАЦИИ СИСТЕМАТИЧЕСКОЙ СОСТАВЛЯЮЩЕЙ ДРЕЙФА НУЛЕВОГО СИГНАЛА ДАТЧИКА УГЛОВОЙ СКОРОСТИ
Вид РИД
Изобретение
Изобретение относится к поворотно-чувствительным устройствам и может применяться при обработке сигналов от датчиков угловой скорости (гироскопических датчиков), используемых в качестве источников первичных измерений инерциальных систем ориентации и навигации неподвижных и подвижных объектов.
Одним из главных источников погрешностей измерений датчиков угловой скорости (ДУС) является систематическая составляющая дрейфа нулевого сигнала, вызванная его нестабильностью при запуске и от пуска к пуску. Особенно остро эта проблема проявляется в микроэлектромеханических ДУС, на базе которых строятся бесплатформенные инерциальные навигационные системы (БИНС).
Известно большое число способов заводской (лабораторной) калибровки ДУС (см., например, [1-4]), обеспечивающих предварительное формирование параметров сигналов, компенсирующих влияние систематических составляющих погрешностей ДУС. Их общим недостатком является требование использования дорогостоящих прецизионных поворотных стендов, дополнительных датчиков линейных ускорений (акселерометров), приборов снятия температурных зависимостей. Также предварительной заводской калибровке свойственно устаревание результатов до применения ДУС по назначению в полевых условиях.
Известен способ компенсации систематических составляющих дрейфа гироскопических датчиков [5], предусматривающий полиномиальную аппроксимацию нулевого сигнала, измеряемого в заводских условиях. Описывая температурную зависимость нулевого сигнала в рабочем диапазоне температур, способ не обеспечивает определение и прогнозирование сигнала в зависимости от времени. Ему также свойственно устаревание результатов.
Наиболее близким к заявляемому способу является способ [6] компенсации дрейфа нулевого сигнала датчика угловой скорости путем формирования из нулевого сигнала компенсирующего сигнала и последующего его использования для корректировки измеряемого сигнала датчика. Формирование компенсирующего сигнала выполняют путем фильтрации первичных измерений нулевого сигнала ДУС, накопления отфильтрованного сигнала, его усреднения, сравнения с заданным уровнем, накопления усредненного сигнала, не превышающего заданный уровень, повторного усреднения. Далее по двум соседним значениям усредненного сигнала проводят прогнозирование, результат которого сравнивают с заданным уровнем. При его превышении в качестве компенсирующего сигнала принимают спрогнозированный сигнал, при не превышении спрогнозированный сигнал в качестве компенсирующего не принимается. Приведены правила выбора текущего компенсирующего сигнала из прогнозируемых и предыдущих компенсирующих сигналов путем накопления, усреднения и сравнения с заданным уровнем четырех и более компенсирующих сигналов, а также четырех и более усредненных сигналов.
Недостатком способа-прототипа [6] является остаточная недокомпенсация систематической составляющей дрейфа нулевого сигнала ДУС из-за низкой точности компенсирующего сигнала. Причиной этого является несовершенство алгоритма его формирования, а именно:
1. Обработку измерений нулевого сигнала ДУС проводят в три этапа: весовое усреднение первичных измерений  по нарастающей выборке (фильтрация), усреднение отфильтрованного сигнала wф(n) по выборке фиксированного объема N (расчет средневыборочного значения wcp(N)), повторное усреднение усредненного сигнала по фиксированной выборке. Этап фильтрации, обеспечивая подавление высокочастотных помеховых составляющих первичных измерений, сопровождается высокой корреляцией медленноменяющихся случайных ошибок выходного сигнала фильтра wф(n). Так, для рассматриваемого в описании дискретного фильтра нижних частот коэффициент корреляции r ошибок отсчетов wф(n-1), wф(n) имеет величину порядка Nф/(Nф+1), где Nф - число отсчетов первичных измерений, укладывающихся в постоянную времени фильтра ТФ. На практике обычно Nф>>1, т.е. коэффициент r близок к единице. Поэтому последующее усреднение (второй этап) не приводит к сколь-нибудь значимому повышению точности усредненного значения wcp(N). Тем более это справедливо для третьего этапа усреднения. Вместе с тем, на всех этапах не учитывается динамика дрейфа нулевого сигнала, что приводит к значительной динамической ошибке оценки его систематической составляющей.
по нарастающей выборке (фильтрация), усреднение отфильтрованного сигнала wф(n) по выборке фиксированного объема N (расчет средневыборочного значения wcp(N)), повторное усреднение усредненного сигнала по фиксированной выборке. Этап фильтрации, обеспечивая подавление высокочастотных помеховых составляющих первичных измерений, сопровождается высокой корреляцией медленноменяющихся случайных ошибок выходного сигнала фильтра wф(n). Так, для рассматриваемого в описании дискретного фильтра нижних частот коэффициент корреляции r ошибок отсчетов wф(n-1), wф(n) имеет величину порядка Nф/(Nф+1), где Nф - число отсчетов первичных измерений, укладывающихся в постоянную времени фильтра ТФ. На практике обычно Nф>>1, т.е. коэффициент r близок к единице. Поэтому последующее усреднение (второй этап) не приводит к сколь-нибудь значимому повышению точности усредненного значения wcp(N). Тем более это справедливо для третьего этапа усреднения. Вместе с тем, на всех этапах не учитывается динамика дрейфа нулевого сигнала, что приводит к значительной динамической ошибке оценки его систематической составляющей.
2. Не определены правила задания уровня нулевого сигнала w0 и допустимого дрейфа δw0др. В результате остается открытым вопрос о точности формирования компенсирующего сигнала.
3. Применяют эмпирические, теоретически не обоснованные правила выбора текущего компенсирующего сигнала из прогнозируемых и предыдущих компенсирующих сигналов, а также алгоритмы прогнозирования. Используемые правила и алгоритмы носят частный характер, применимы лишь в отдельных случаях и приводят к формированию грубого компенсирующего сигнала.
Заявляемый способ решает задачу формирования высокоточного компенсирующего сигнала, при этом достигается такой технический результат как повышение точностных характеристик датчиков угловой скорости.
Для получения указанного технического результата в способе компенсации систематической составляющей дрейфа нулевого сигнала датчика угловой скорости путем формирования из нулевого сигнала компенсирующего сигнала и последующего его использования для корректировки измеряемого сигнала датчика, формирование компенсирующего сигнала выполняют при каждом запуске датчика путем полиномиальной аппроксимации нулевого сигнала методом наименьших квадратов (МНК) на заданном или выбираемом из условий применения временном интервале и расчета по коэффициентам аппроксимирующего полинома прогнозируемых значений компенсирующего сигнала на требуемые моменты времени корректировки измеряемого сигнала датчика.
Основными отличительными признаками заявляемого способа по сравнению с прототипом являются:
1. Формирование аппроксимирующего сигнала выполняют при каждом запуске на заданном или выбираемом из условий применения временном интервале. При этом за интервалом формирования непосредственно следует интервал корректировки первичных измерений с помощью прогнозируемых значений компенсирующего сигнала.
В прототипе временные ограничения и порядок действий по компенсации не определены.
2. Компенсирующий сигнал формируют путем одноэтапной процедуры полиномиальной аппроксимации нулевого сигнала методом наименьших квадратов. Этим обеспечивается минимальная дисперсия случайной ошибки оценки систематической составляющей дрейфа нулевого сигнала при практически нулевой (при согласовании степени полинома с динамикой дрейфа) динамической ошибке.
В прототипе используют избыточную трехэтапную процедуру усреднения с значительным уровнем случайной и динамической ошибок формирования компенсирующего сигнала.
3. Прогнозируемые значения компенсирующего сигнала рассчитывают по коэффициентам аппроксимирующего полинома на моменты времени корректировки измеряемого сигнала для каждого первичного измерительного отсчета.
В прототипе используют грубые эмпирические процедуры линейного прогнозирования, применимые в отдельных частных случаях. При этом рассчитывают общий прогнозируемый компенсирующий сигнал для группы измерительных отсчетов, что снижает точность корректировки.
Важным дополнительным признаком, отличающим заявляемый способ от прототипа, является исходная предпосылка о нецелесообразности сравнения компенсирующего сигнала и его прогнозируемых значений с каким-либо заданным уровнем, как это делают в прототипе (уровень нулевого сигнала w0, допустимый дрейф δw0др). Выявлению и компенсации подлежит любой ненулевой уровень нулевого сигнала ДУС, независимо от его происхождения и состава (типы ошибок ДУС, см., например, в [7]). При решении задач угловой ориентации и навигации объектов-носителей ДУС значимым является лишь сигнал, обусловленный собственным вращением объекта (исключение составляет гирокомпасный режим ДУС). По этой причине заявляемый способ реализует полиномиальную МНК-аппроксимацию дрейфа нулевого сигнала, эффективно фильтрующую высокочастотные помеховые составляющие и восстанавливающую систематическую составляющую независимо от ее уровня.
Рассмотрим сущность заявляемого способа и возможность его технической реализации.
На заданном или выбираемом из условий применения ДУС временном интервале Т при каждом запуске проводят накопление N первичных измерительных отсчетов нулевого сигнала  Число N определяется интервалом Т и частотой f выдачи данных датчиком, N=T×f. Для трехосного ДУС параллельно накапливают три массива отсчетов по каждой измерительной оси датчика. В силу общности алгоритма обработки измерений в дальнейшем рассматривается одна измерительная ось.
Число N определяется интервалом Т и частотой f выдачи данных датчиком, N=T×f. Для трехосного ДУС параллельно накапливают три массива отсчетов по каждой измерительной оси датчика. В силу общности алгоритма обработки измерений в дальнейшем рассматривается одна измерительная ось.
Заявляемый способ  в инерциальных системах ориентации и навигации различных объектов. Так, он может быть реализован в аппаратуре топогеодезической привязки и формирования целеуказаний [8], основу которой составляет угломерная поворотная платформа на неподвижном основании. Далее для конкретности и наглядности на этом примере раскроем сущность способа.
в инерциальных системах ориентации и навигации различных объектов. Так, он может быть реализован в аппаратуре топогеодезической привязки и формирования целеуказаний [8], основу которой составляет угломерная поворотная платформа на неподвижном основании. Далее для конкретности и наглядности на этом примере раскроем сущность способа.
Для накопления массива измерительных отсчетов нулевого сигнала  платформу с БИНС (ДУС) устанавливают в неподвижное положение. Одну из осей ДУС направляют на репер (ориентир) с известным относительно точки установки БИНС истинным азимутом. Накопление отсчетов на заданном интервале Т (предварительно закладывается в аппаратуру) после запуска ДУС выполняется автоматически. Экспериментальные исследования показывают, что при использовании высокоточных микроэлектромеханических ДУС (например, ADIS 16495 BLMZ-1 производства компании Analog Device) достаточным является интервал Т=60-120 с. В полевых условиях начало и конец интервала Т могут задаваться оператором с помощью органов управления, исходя из текущей обстановки и тактики применения аппаратуры.
платформу с БИНС (ДУС) устанавливают в неподвижное положение. Одну из осей ДУС направляют на репер (ориентир) с известным относительно точки установки БИНС истинным азимутом. Накопление отсчетов на заданном интервале Т (предварительно закладывается в аппаратуру) после запуска ДУС выполняется автоматически. Экспериментальные исследования показывают, что при использовании высокоточных микроэлектромеханических ДУС (например, ADIS 16495 BLMZ-1 производства компании Analog Device) достаточным является интервал Т=60-120 с. В полевых условиях начало и конец интервала Т могут задаваться оператором с помощью органов управления, исходя из текущей обстановки и тактики применения аппаратуры.
Обработку накопленного массива  n=1, 2, …, N методом наименьших квадратов проводят с использованием полиномиальной модели динамики изменения систематической составляющей d(n) дрейфа нулевого сигнала во времени:
n=1, 2, …, N методом наименьших квадратов проводят с использованием полиномиальной модели динамики изменения систематической составляющей d(n) дрейфа нулевого сигнала во времени:

где bi - коэффициенты аппроксимирующего полинома; t(n)=(n-1)τ - относительное время, отсчитываемое от начала интервала Т; m - степень полинома; τ=1/f - шаг поступления данных ДУС.
МНК-оценку коэффициентов bi рассчитывают по формуле:

где  - вектор-столбец оценок коэффициентов;
- вектор-столбец оценок коэффициентов;  - вектор-столбец (массив) измерительных отсчетов; А - матрица вида:
- вектор-столбец (массив) измерительных отсчетов; А - матрица вида:
По оценкам коэффициентов  на последующие моменты времени t(n), n>N в соответствии с соотношением (1) рассчитывают прогнозируемые значения компенсирующего сигнала
на последующие моменты времени t(n), n>N в соответствии с соотношением (1) рассчитывают прогнозируемые значения компенсирующего сигнала  с помощью которых корректируют М текущих измерений угловой скорости
с помощью которых корректируют М текущих измерений угловой скорости 
 Скорректированные измерения
Скорректированные измерения  далее используют для решения целевых задач. Корректировке могут подвергаться как измерения
далее используют для решения целевых задач. Корректировке могут подвергаться как измерения  непосредственно следующие за интервалом Т, т.е. на моменты времени t(N+1) и далее, так и отстоящие на некоторый интервал ожидания. В последнем случае следует учитывать эффект устаревания корректирующих данных.
непосредственно следующие за интервалом Т, т.е. на моменты времени t(N+1) и далее, так и отстоящие на некоторый интервал ожидания. В последнем случае следует учитывать эффект устаревания корректирующих данных.
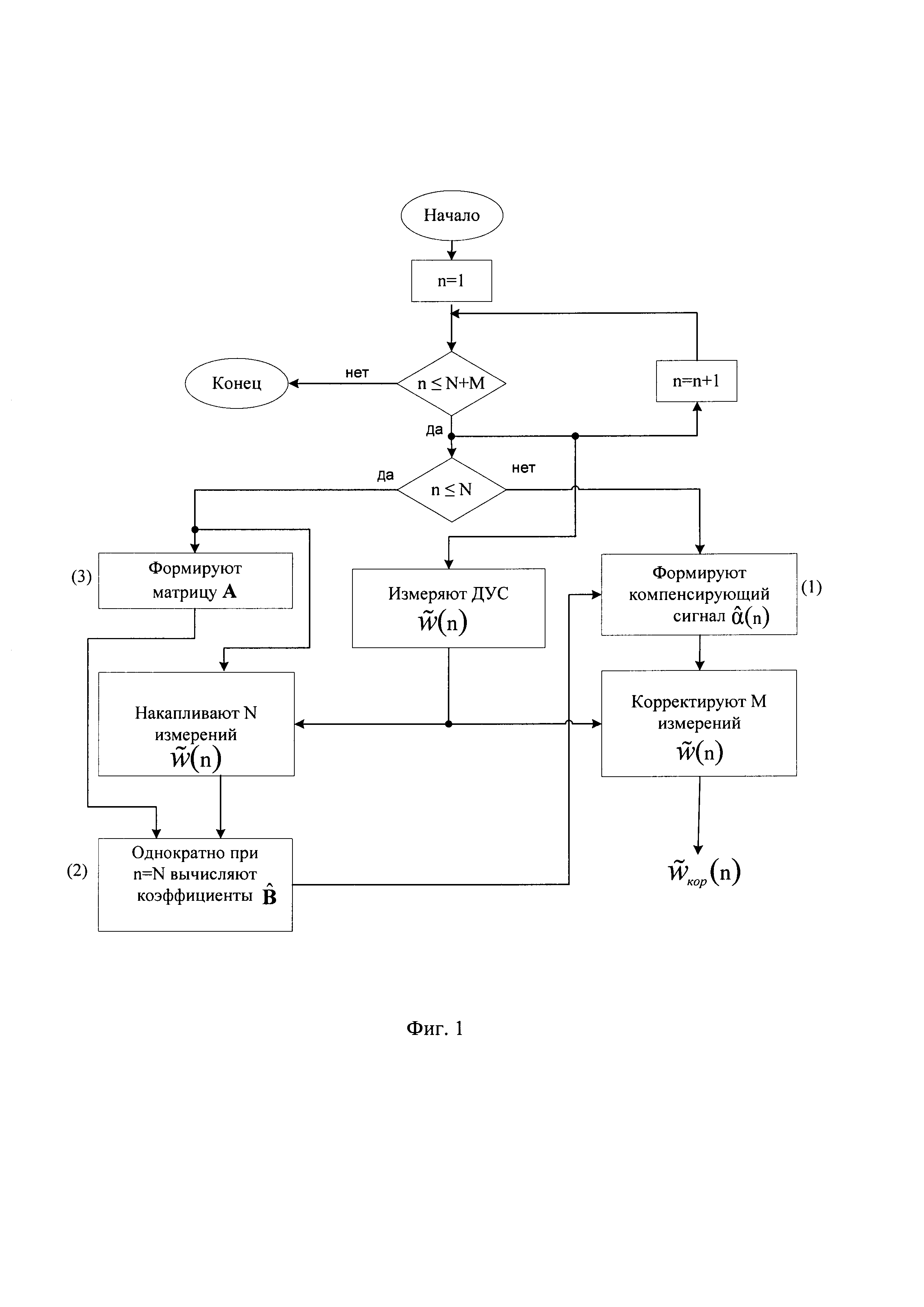
Заявляемый способ иллюстрирует Фиг. 1 - Алгоритм работы способа. Представленный алгоритм соответствует варианту предварительно заданных чисел N накапливаемых отсчетов нулевого сигнала (интервала Т) и М измерительных отсчетов угловой скорости, корректируемых на интервале времени, следующем за интервалом Т. Номера в круглых скобках соответствуют номерам соотношений описания, выполняемых операторами алгоритма. В другом варианте значения N, М оперативно выбирают в процессе применения ДУС.
Изложенный алгоритм расчета и корректировки реализуют в собственном контроллере ДУС, либо в контроллере поворотной платформы (БИНС).
По существу, определение оценок коэффициентов  является полевой калибровкой ДУС непосредственно в месте применения. Ее результаты соответствуют конкретной рабочей температуре датчика и не требуют уточнения по заводским калибровочным температурным зависимостям.
является полевой калибровкой ДУС непосредственно в месте применения. Ее результаты соответствуют конкретной рабочей температуре датчика и не требуют уточнения по заводским калибровочным температурным зависимостям.
Примером целевого применения скорректированных измерений  является задача азимутально-угломестных определений, решаемая аппаратурой топопривязки и целеуказания в гироазимутальном режиме. В этом режиме по окончании полевой калибровки трехосного ДУС платформу перенацеливают с репера на заданный объект (цель). Измеряемые в процессе поворота платформы скорректированные угловые скорости
является задача азимутально-угломестных определений, решаемая аппаратурой топопривязки и целеуказания в гироазимутальном режиме. В этом режиме по окончании полевой калибровки трехосного ДУС платформу перенацеливают с репера на заданный объект (цель). Измеряемые в процессе поворота платформы скорректированные угловые скорости  поступают в рекуррентную процедуру расчета текущих направляющих косинусов измерительных осей ДУС относительно осей географической системы координат, по конечным значениям которых вычисляют азимут и угол места объекта. Начальными значениями служат истинный азимут репера и начальные углы места и крена платформы, измеряемые трехосным акселерометром БИНС (входит в состав комбидатчика ADIS 16495 BLMZ-1). На этом примере далее демонстрируется эффективность заявляемого способа.
поступают в рекуррентную процедуру расчета текущих направляющих косинусов измерительных осей ДУС относительно осей географической системы координат, по конечным значениям которых вычисляют азимут и угол места объекта. Начальными значениями служат истинный азимут репера и начальные углы места и крена платформы, измеряемые трехосным акселерометром БИНС (входит в состав комбидатчика ADIS 16495 BLMZ-1). На этом примере далее демонстрируется эффективность заявляемого способа.
Отметим, что изложенное справедливо для других практических приложений способа.
Экспериментальные данные показывают, что на достаточно продолжительных интервалах накопления и аппроксимации (60-120 с и более) и последующей корректировки измеряемого сигнала приемлемой является параболическая модель, оценки коэффициентов  которой рассчитывают по формуле (2) с матрицами А и ATА вида:
которой рассчитывают по формуле (2) с матрицами А и ATА вида:
На более коротких интервалах (30-60 с) применима линейная модель, конечные формулы расчета коэффициентов которой имеют вид:

где весовые коэффициенты
c0(n)=(4N+4-6n)/N(N+1), cl(n)=(12n-6N-6)/τN(N2-1).
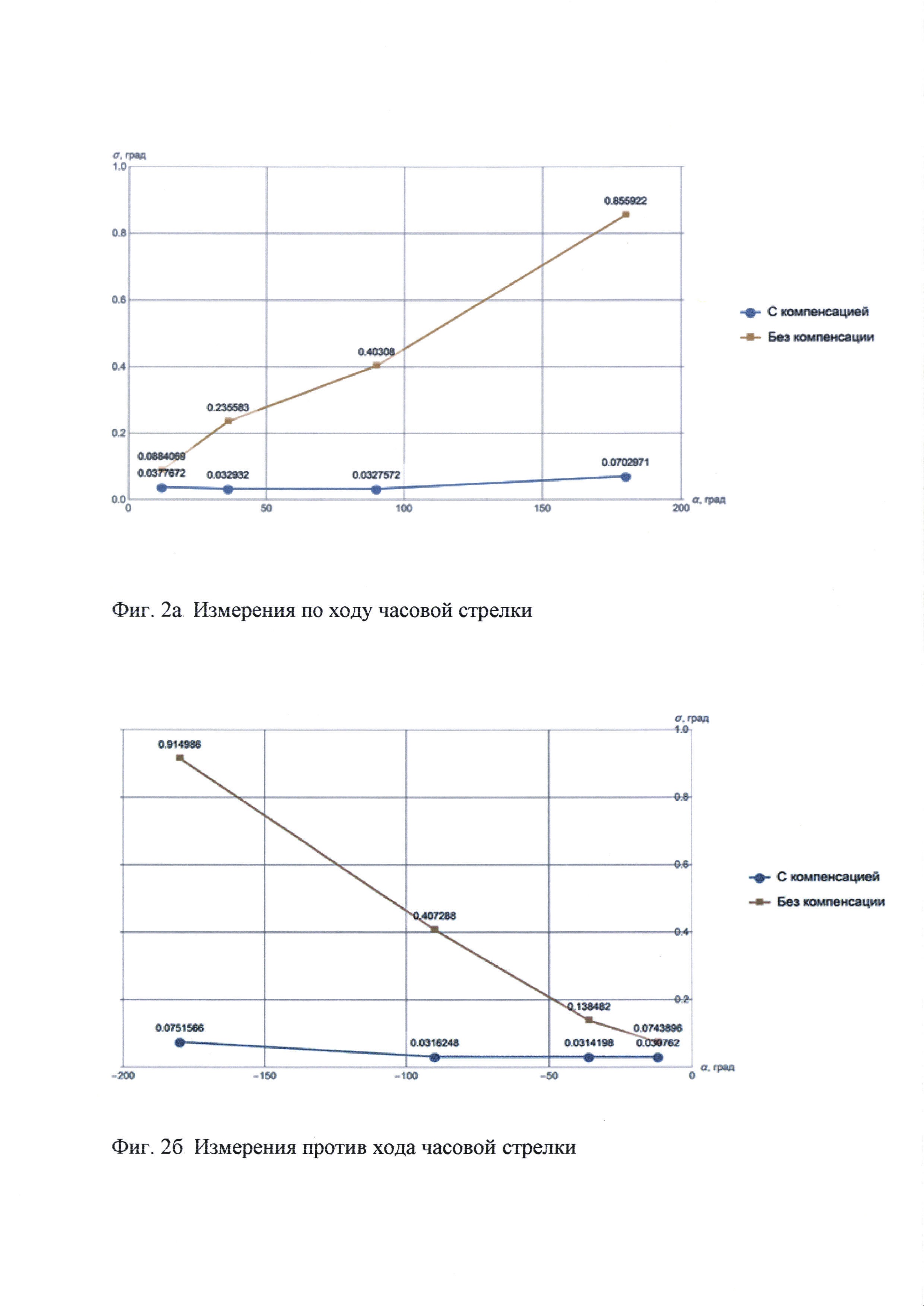
Эффективность заявляемого способа демонстрируют экспериментальные результаты, представленные на Фиг. 2. Эксперимент состоял в следующем.
Угломерная платформа [8] устанавливалась на перископическую буссоль ПАБ-2. Связанные оси платформы (измерительные оси ДУС ADIS 16495 BLMZ-1) согласовывались с соответствующими осями буссоли. В отсчете от исходного нулевого положения выполнялся совместный поворот платформы и буссоли. Скорость вращения выдерживалась приблизительно равной 4 град/с, что соответствует времени поворота на 180 град порядка 45 с. Значения азимута α, отсчитываемые по шкалам буссоли, использовались в качестве эталонных для значений азимута  вычисляемых с помощью рекуррентной процедуры расчета текущих направляющих косинусов по измерениям ДУС. Для полноты эксперимента поворот проводился по ходу (Фиг. 2а) и против хода часовой стрелки (Фиг. 2б). Последовательно задавались различные углы поворота α. В частности (Фиг. 2), были заданы значения ±12, ±36, ±90 и ±180 град.
вычисляемых с помощью рекуррентной процедуры расчета текущих направляющих косинусов по измерениям ДУС. Для полноты эксперимента поворот проводился по ходу (Фиг. 2а) и против хода часовой стрелки (Фиг. 2б). Последовательно задавались различные углы поворота α. В частности (Фиг. 2), были заданы значения ±12, ±36, ±90 и ±180 град.
Для каждого угла α формировались 10 независимых трехмерных массивов первичных измерений угловых скоростей  (проводились 10 сеансов измерений) и 10 соответствующих массивов скорректированных значений
(проводились 10 сеансов измерений) и 10 соответствующих массивов скорректированных значений  По каждому массиву рассчитывались азимуты
По каждому массиву рассчитывались азимуты  i=1, …, 10, соответствующие заданному углу поворота α. При этом компенсирующие сигналы
i=1, …, 10, соответствующие заданному углу поворота α. При этом компенсирующие сигналы  формировались на предшествующем интервале Т накопления нулевого сигнала длительностью Т=60с с использованием линейной МНК-аппроксимации (4) по каждой измерительной оси ДУС.
формировались на предшествующем интервале Т накопления нулевого сигнала длительностью Т=60с с использованием линейной МНК-аппроксимации (4) по каждой измерительной оси ДУС.
Оценка точности определения азимута  по первичным измерениям
по первичным измерениям  проводилась путем расчета среднеквадратической ошибки по формуле:
проводилась путем расчета среднеквадратической ошибки по формуле:

Аналогично рассчитывалась ошибка определения азимута  по скорректированным измерениям
по скорректированным измерениям 

 при замене в (5)
при замене в (5) 
Анализ результатов (Фиг. 2) показывает, что применение заявляемого способа обеспечивает значительное повышение точности определения азимута по сравнению с его расчетом по первичным (нескорректированным) измерениям ДУС. При этом с ростом угла α (по модулю) выигрыш в точности увеличивается и при значениях |α|>75 град (приблизительно) возрастает на порядок и более.
Важно отметить, что в отличие от прототипа [6], где иллюстрация эффективности предлагаемого способа ограничивается промежуточными результатами (графиками) накопления во времени скомпенсированного и нескомпенсированного дрейфа нулевого сигнала (Фиг. 2 описания прототипа), представленные материалы иллюстрируют совокупный результат одновременной компенсации систематической составляющей дрейфа нулевого сигнала по всем трем осям ДУС, а именно повышение итоговой точности конечной процедуры определения произвольного текущего азимута.
Таким образом, заявляемый способ может быть реализован и обеспечивает повышение точностных характеристик датчиков угловой скорости.
Источники информации
1. Патент RU 2447404. Способ калибровки датчиков угловой скорости бесплатформенного инерциального измерительного модуля. - Опубл. 10.04.2012. Бюл. №10.
2. Шаврин В.В., Конаков А.С., Тисленко В.И. Калибровка микроэлектромеханических датчиков ускорений и угловых скоростей в бесплатформенных ингерциальных навигационных системах // Доклады ТУСУРа. №1 (25). Часть 2. Июнь 2012. С. 265-269.
3. Бессонов Р.В., Дятлов С.А., Куркина А.Н., Сазонов В.В. Вопросы применения микромеханических гироскопов для космических полетов // Современные проблемы дистанционного зондирования Земли из космоса. 2013. Т. 10. №4. С. 51-63.
4. Иванов Д.С., Ткачёв С.С., Карпенко С.О., Овчинников М.Ю. Калибровка датчиков для определения ориентации малого космического аппарата // Препринты ИМП им. М.В. Келдыша. 2010. №28. 30 с.
5. Патент RU 2598155. Способ компенсации систематических составляющих дрейфа гироскопических датчиков. - Опубл. 20.09.2016. Бюл. №26.
6. Патент RU 2635846. Способ компенсации дрейфа нулевых сигналов гироскопических датчиков. - Опубл. 16.11.2017. Бюл. №32.
7. Миллер А.Б., Степанов А.Н., Чикрин Д.Е. Типы ошибок в инерциальных навигационных системах и методы их аппроксимации // Информационные процессы. 2014. Т. 14. №4. С. 326-339.
8. Патент RU 2661676. Комплект носимой аппаратуры топогеодезической привязки и формирования целеуказаний. - Опубл. 18.07.2018. Бюл. №20.
Способ компенсации систематической составляющей дрейфа нулевого сигнала датчика угловой скорости путем формирования из нулевого сигнала компенсирующего сигнала и последующего его использования для корректировки измеряемого сигнала датчика, отличающийся тем, что формирование компенсирующего сигнала выполняют при каждом запуске датчика путем полиномиальной аппроксимации нулевого сигнала методом наименьших квадратов на заданном или выбираемом из условий применения временном интервале и расчета по коэффициентам аппроксимирующего полинома прогнозируемых значений компенсирующего сигнала на требуемые моменты времени корректировки измеряемого сигнала датчика.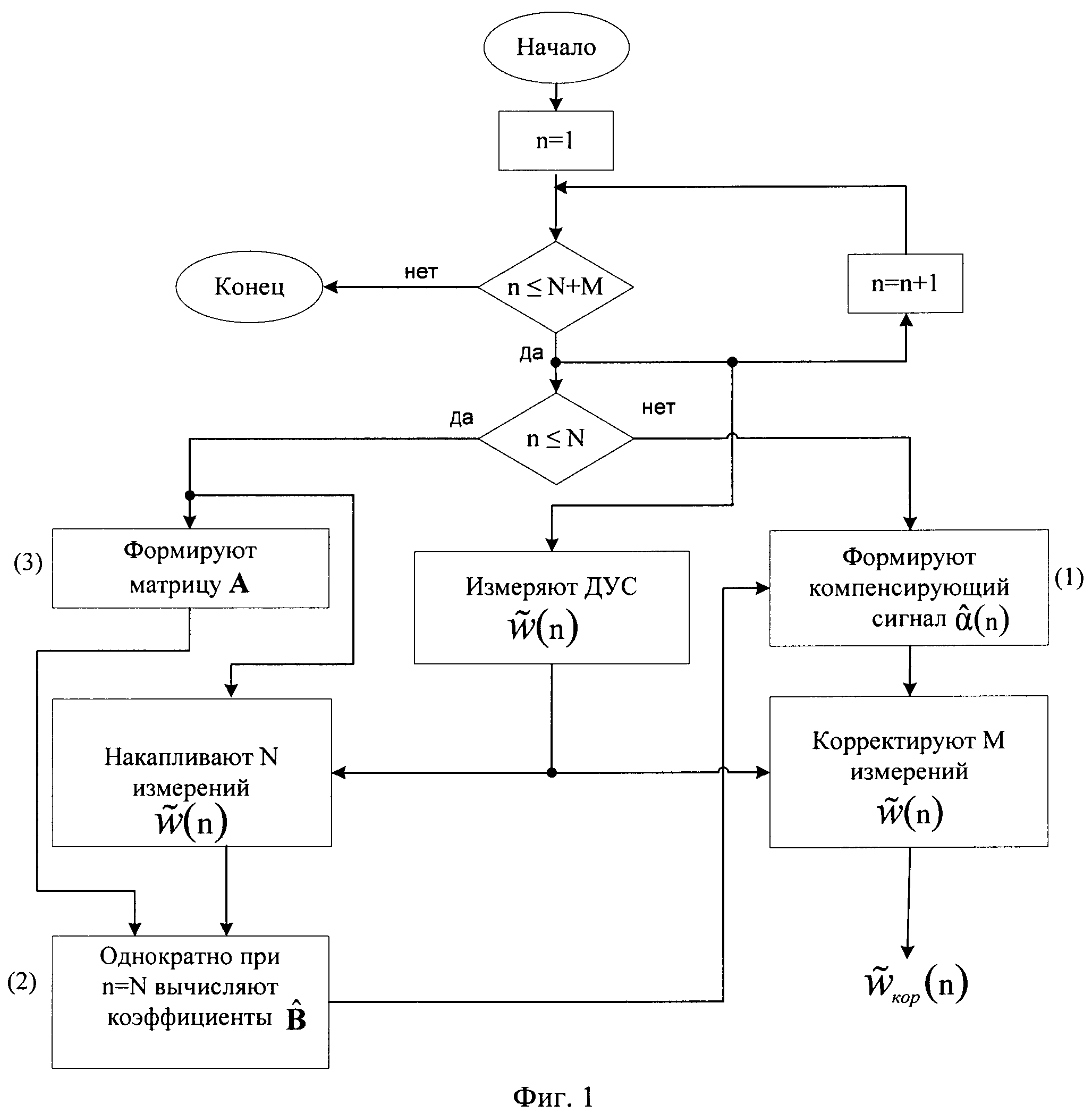
Способ определения местоположения наземного подвижного объекта
Система портативных комплектов для автоматизированного целеуказания на поле боя
Способ калибровки магнитного компаса пешехода
Способ калибровки электронного магнитного компаса
Способ калибровки акселерометрического трехосевого инклинометра
Способ калибровки электронного магнитного компаса
Способ измерения магнитного курса подвижного объекта
Комплект носимой аппаратуры топогеодезической привязки и формирования целеуказаний
Способ определения истинного курса подвижного объекта
Способ полевой калибровки магнитного компаса
Модульная информационная система парашютиста
Способ определения местоположения наземного подвижного объекта

