Результат интеллектуальной деятельности: АДАПТИВНОЕ ОБЪЕДИНЕНИЕ ИДЕНТИФИКАЦИЙ ВОДИТЕЛЯ
Вид РИД
Изобретение
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
[0001] По данной заявке испрашивается приоритет по предварительной заявке на патент США № 62/061,821, озаглавленной "ADAPTIVE DRIVER IDENTIFICATION FUSION" и зарегистрированной 9 октября 2014 года, содержимое которой, при этом, содержится по ссылке во всей своей полноте.
УРОВЕНЬ ТЕХНИКИ
[0002] Когда множество водителей эксплуатируют автомобиль, каждый из множества водителей может иметь различные предпочтения настройки транспортного средства. Различные технологии, такие как распознавание брелока ключа, обнаружение беспроводного устройства и т.д., могут быть использованы, чтобы идентифицировать водителя. Биометрические системы также были встроены в транспортные средства, чтобы предоставлять возможность контроллеру автомобиля идентифицировать (или наиболее вероятно предполагать) текущего водителя и автоматически регулировать настройки транспортного средства, чтобы соответствовать предпочтениям данного пользователя. Например, биометрические системы могут идентифицировать водителя транспортного средства на основе данных отпечатка пальца, данных сетчатки глаза, черт лица и т.д.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0003] Фиг. 1 иллюстрирует примерное транспортное средство, имеющее систему идентификации водителя.
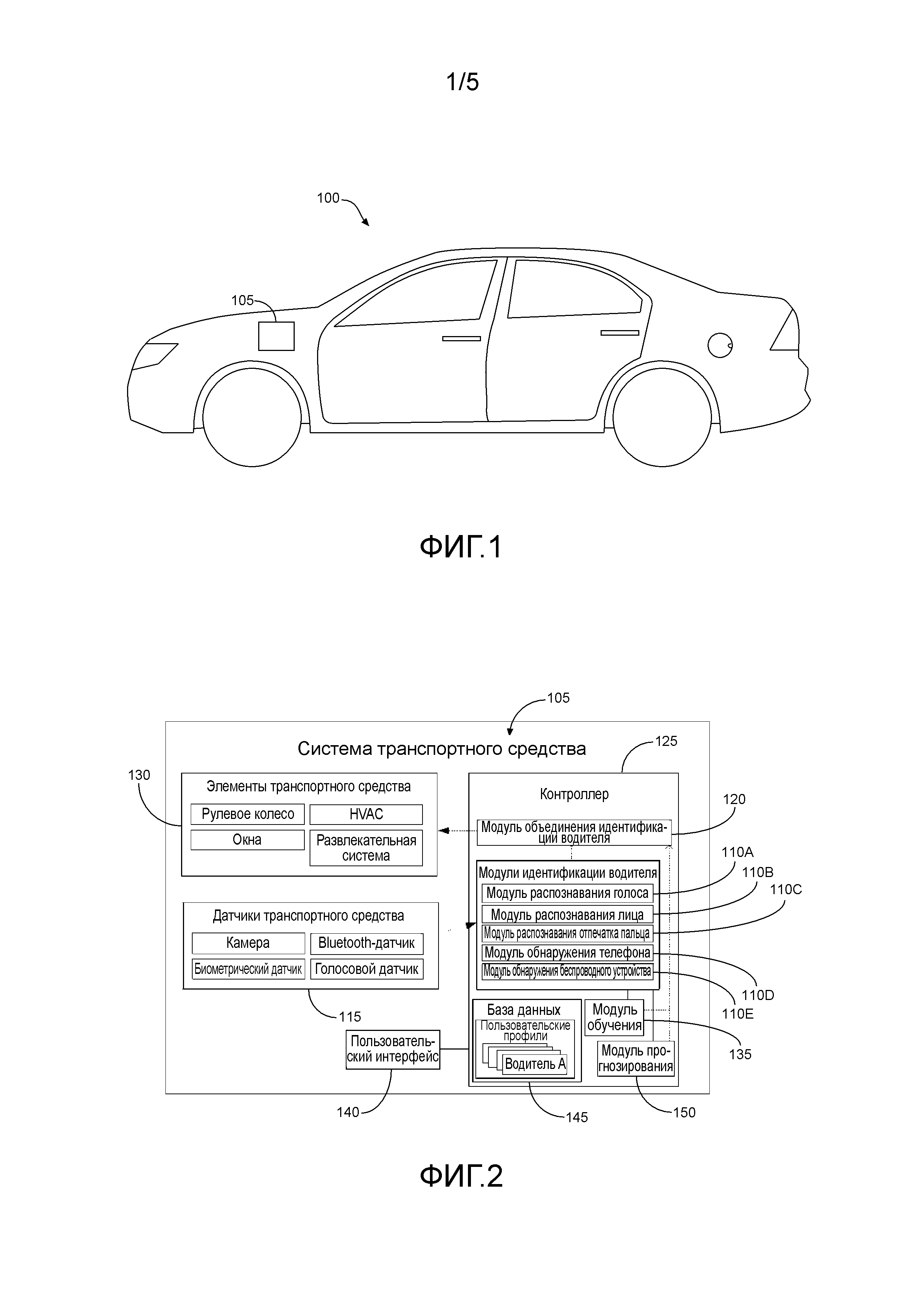
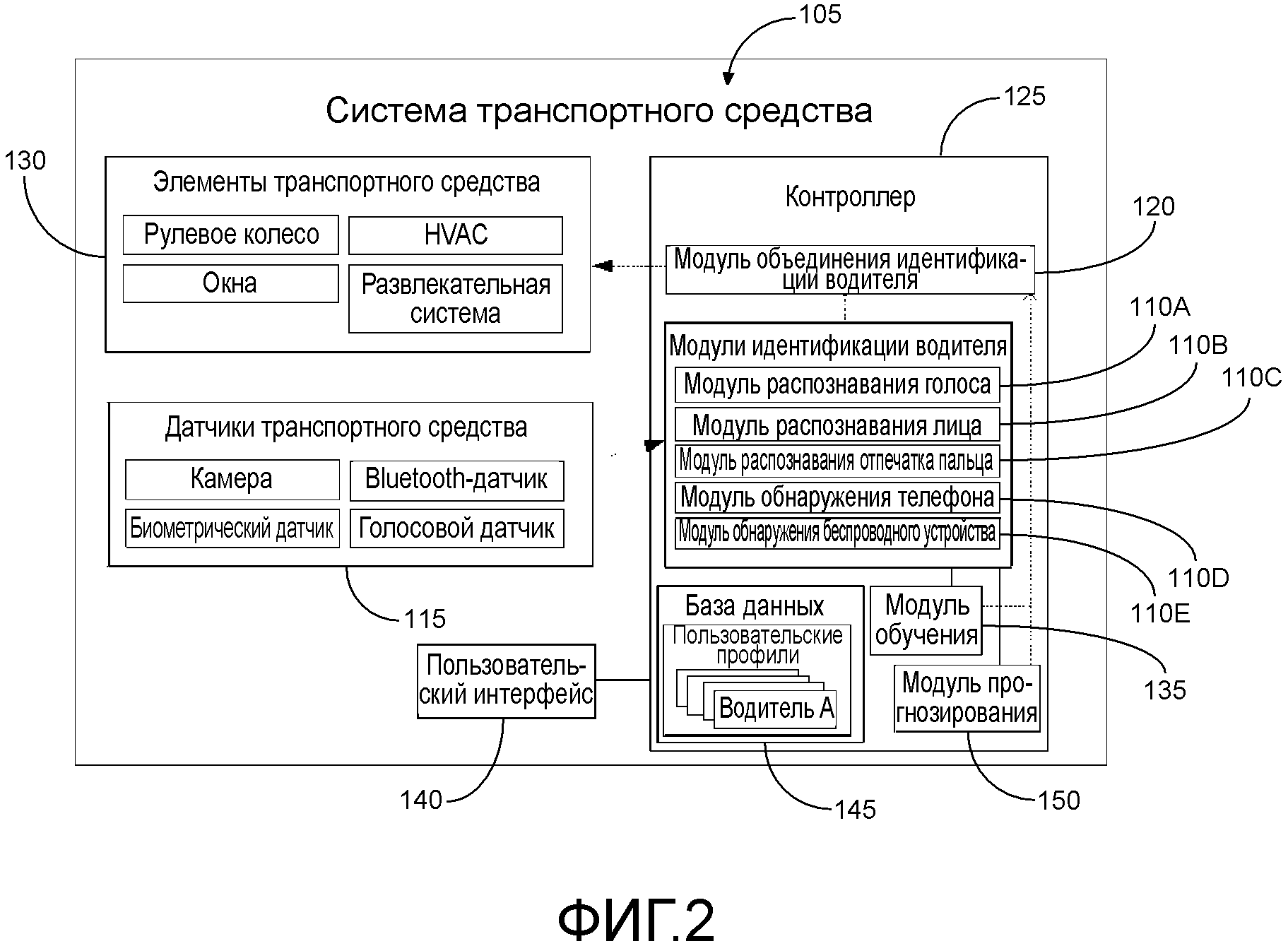
[0004] Фиг. 2 иллюстрирует примерную систему идентификации водителя, которая реализует модуль объединения идентификации водителя, чтобы идентифицировать водителя.
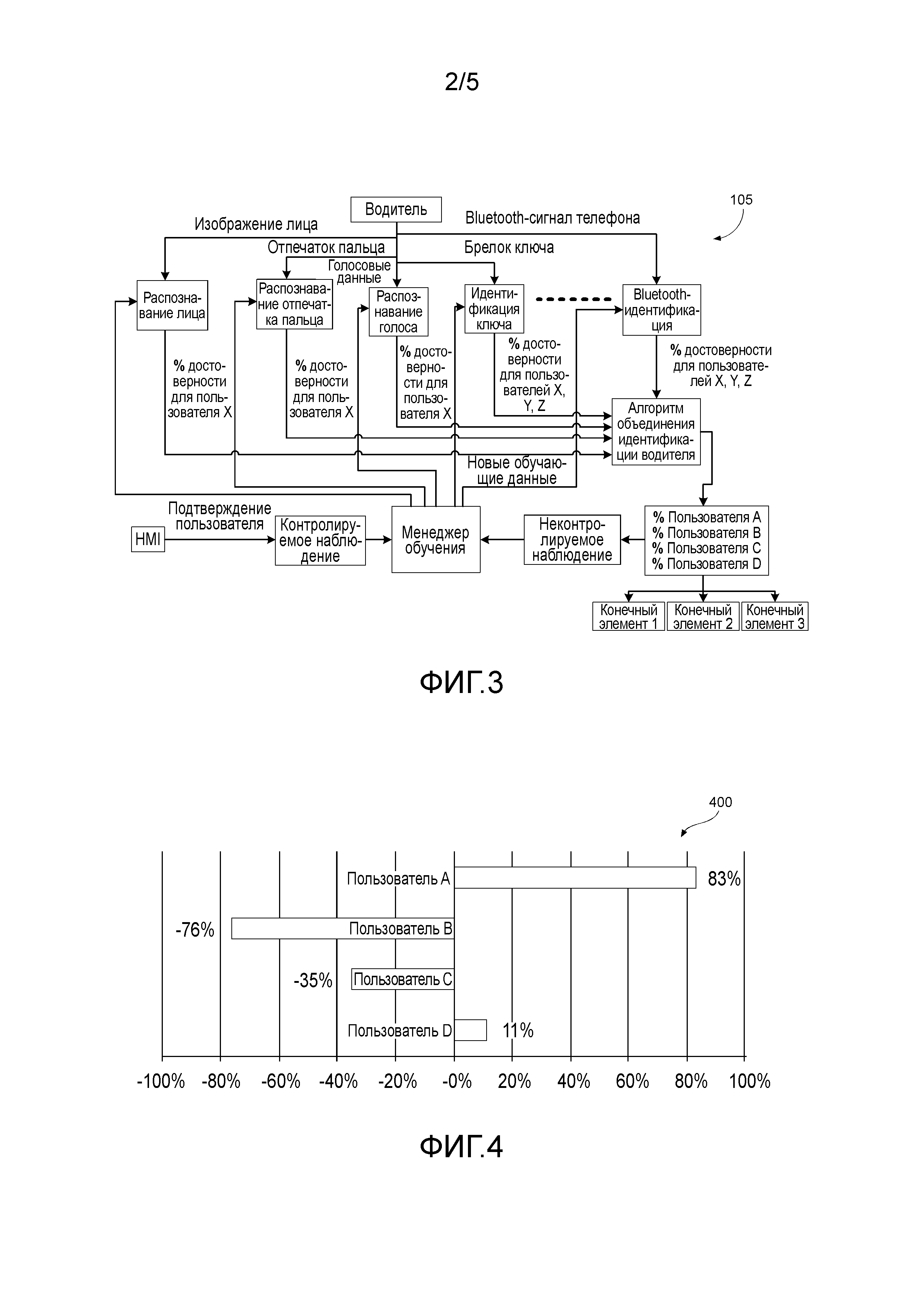
[0005] Фиг. 3 - это схема последовательности сигналов примерной системы идентификации водителя на фиг. 2.
[0006] Фиг. 4 - это график, показывающий примерные определения достоверности модуля объединения идентификации водителя на фиг. 2.
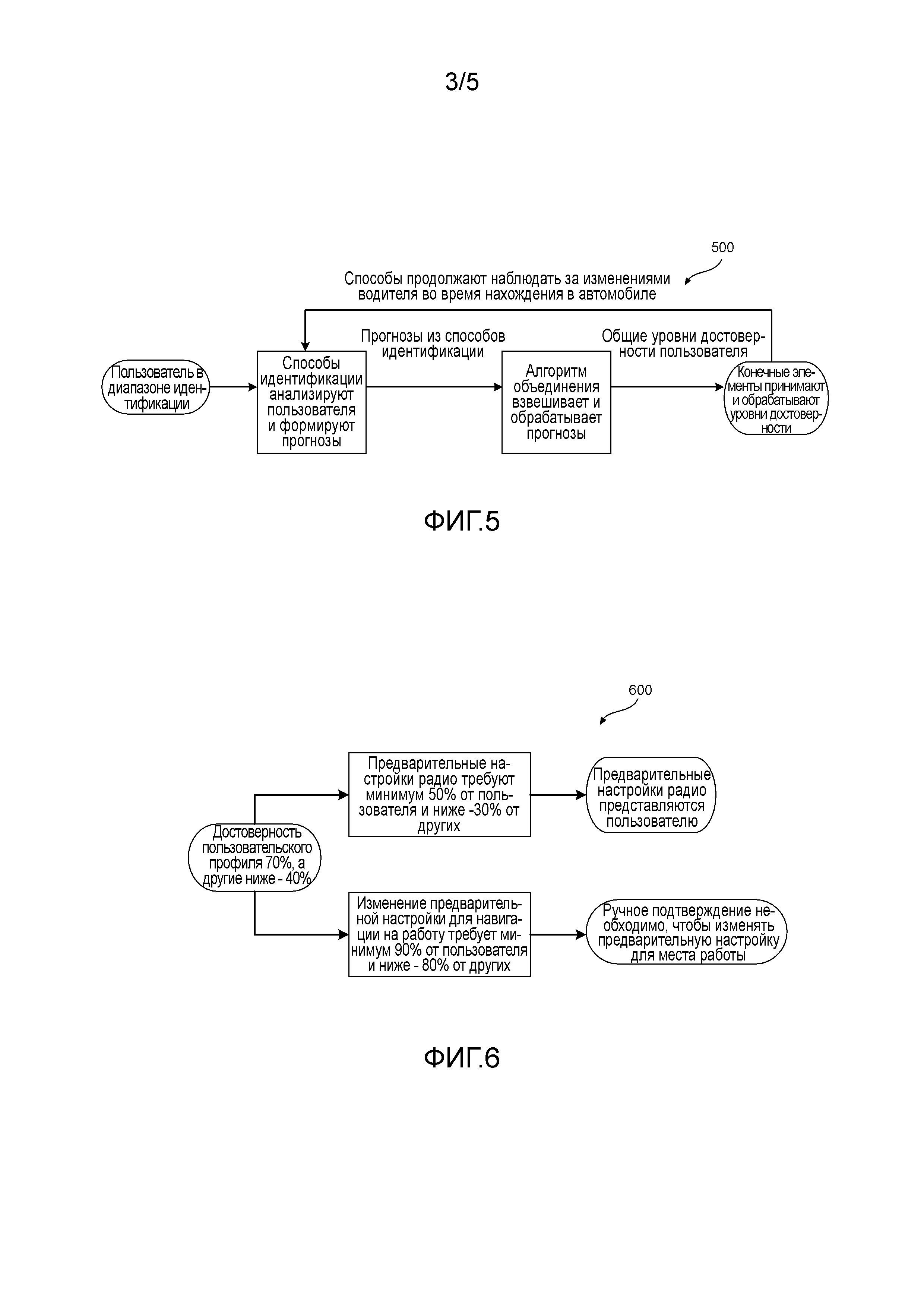
[0007] Фиг. 5 - это блок-схема, иллюстрирующая процесс, который может выполняться посредством модуля объединения идентификации водителя на фиг. 2.
[0008] Фиг. 6 - это блок-схема, иллюстрирующая то, как различные системы транспортного средства используют различные характеристики, чтобы идентифицировать водителя.
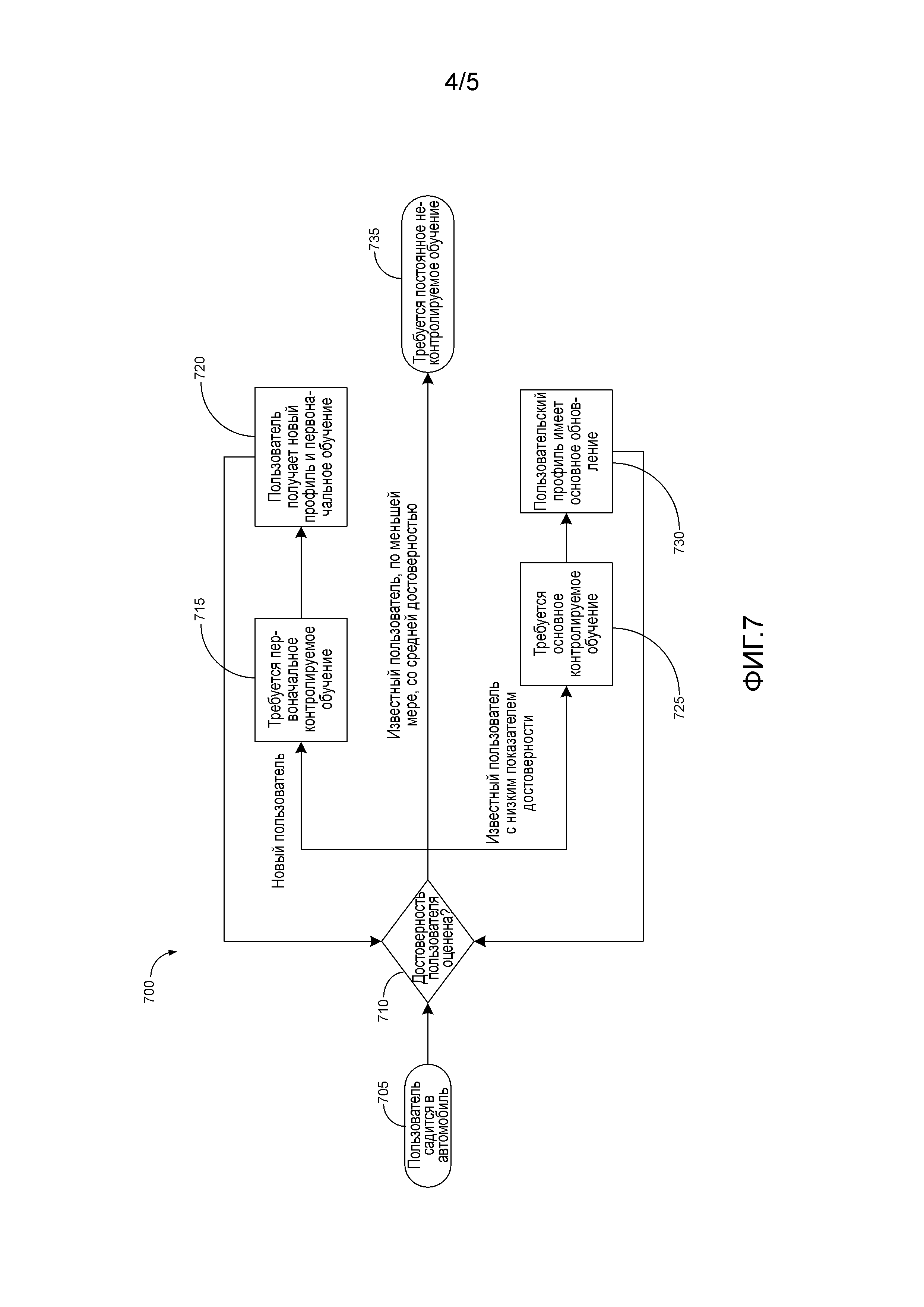
[0009] Фиг. 7 - это блок-схема последовательности операций процесса, который может выполняться посредством модуля объединения идентификации водителя, чтобы изучать характеристики относительно нового и известного пользователя.
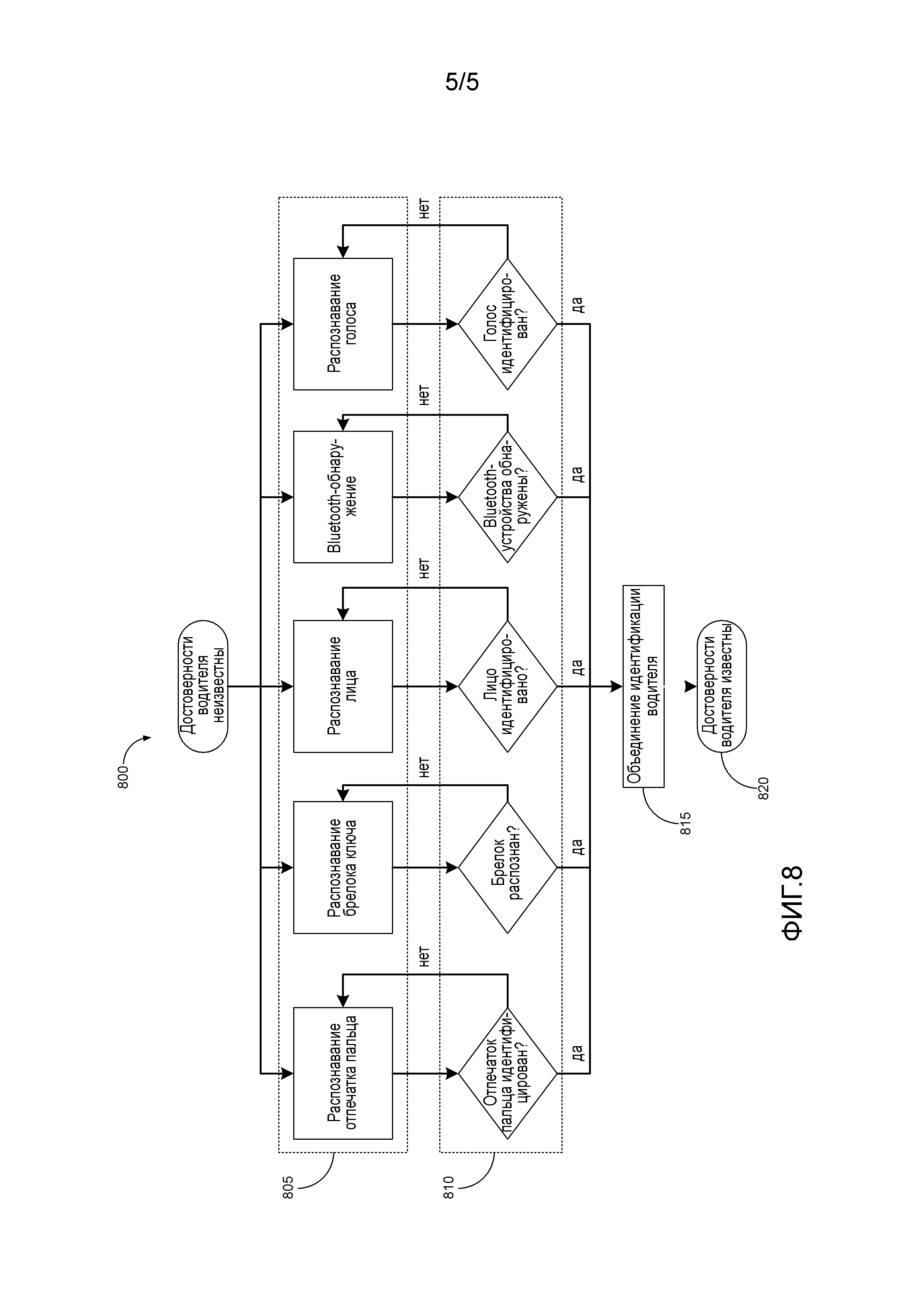
[0010] Фиг. 8 - это блок-схема последовательности операций процесса для примерного процесса, который может быть выполнен посредством модуля объединения идентификации водителя, чтобы идентифицировать водителя.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0011] Некоторые системы распознавания водителя имеют недостатки. В качестве примера, биометрические системы могут не иметь возможности точно идентифицировать водителя, если водитель изменил свой физический внешний вид. Например, если водитель значительно изменил стрижку или изменил свой цвет волос, поскольку биометрическая система была откалибрована для водителя, контроллер может не иметь возможности идентифицировать водителя с высокой достоверностью. В некоторых случаях контроллер может неправильно идентифицировать водителя как альтернативного пользователя и регулировать настройки транспортного средства на основе альтернативного пользователя. По существу, это может приводить в результате к тому, что водитель транспортного средства должен повторно регулировать настройки транспортного средства, ухудшая восприятие нахождения в транспортном средстве. В еще дополнительных случаях эксплуатация транспортного средства может быть ограничена вследствие того, что контроллер не распознает основного водителя транспортного средства точным образом.
[0012] В данном документе раскрываются способы и системы для идентификации водителя транспортного средства более точно и достоверно, чем было ранее возможно, даже в случаях, когда физический внешний вид водителя транспортного средства изменился. Соответственно, способ идентификации водителя включает в себя корректировку достоверности идентификации водителя на основе входных данных, принимаемых от механизмов, использующих различные технологии. Каждая технология может быть взвешена независимо от других технологий на основе достоверности в конкретной технологии. Таким образом, объединение технологий идентификации может быть использовано, чтобы идентифицировать водителя автомобиля. Такие технологии, которые могут быть использованы вместе, включают в себя (но не только) распознавание лица, обнаружение беспроводного устройства, распознавание брелока ключа, распознавание отпечатка пальца и распознавание голоса. Процесс в транспортном средстве может объединять результаты каждой отдельной технологии вместе и взвешивать вклад каждой технологии, чтобы определять пользователя за рулевым колесом. Способ может также предоставлять возможность статических (контролируемых) и динамических (неконтролируемых) обновлений процесса изучения водителя. Таким образом, идентификация водителя может адаптивно корректироваться, даже когда внешний вид водителя изменяется или иначе вызывает падение в оценке достоверности одной или более технологий идентификации водителя.
[0013] Каждая отдельная система идентификации может выводить информацию идентификации водителя, включающую в себя информацию, которая может быть интерпретирована как "значения достоверности", что водитель в транспортном средстве является конкретным человеком. Система может принимать и собирать сигналы от множества систем идентификации. Совокупный вывод может быть множеством сигналов, например, по одному для каждого потенциального водителя, или единым сигналом, представляющим уровни достоверности всех потенциальных водителей. Тем не менее, совокупный сигнал уровня достоверности может включать в себя или использоваться, чтобы определять список всех возможных водителей, известных системе, также как и уровень достоверности для каждого водителя.
[0014] Отдельные системы могут иметь возможность использовать информацию различными способами. Некоторые системы, включающие в себя системы, где определение водителя может не быть критичным или важным, могут определять, какой человек имеет наивысший уровень достоверности, и определять, что человек с наивысшим уровнем достоверности является текущим водителем транспортного средства. Для систем, где знание фактического водителя более важно, таких как системы, которые отображают или полагаются на персональную информацию, система может не раскрывать какую-либо персональную информацию о каком-либо водителе, например, пока личность водителя не будет подтверждена. Таким образом, если уровни достоверности для большинства вероятно потенциальных водителей аналогичны, система может не отображать какую-либо персональную информацию, пока фактическая личность водителя не будет подтверждена.
[0015] Более того, для случаев, когда личности водителей не могут быть выделены, поскольку, например, аналогичные уровни достоверности ассоциируются с двумя или более потенциальными водителями, система может определять, какие настройки применять к двум или более потенциальным водителям, и выполнять соответствующие регулировки. Например, если два наиболее вероятных водителя имеют одинаковые или похожие настройки сидений, позиция сиденья может быть отрегулирована, например, в среднюю настройку, по меньшей мере, до тех пор, пока водитель не сможет быть идентифицирован более конкретно.
[0016] Показанные элементы могут принимать многие различные формы и включать в себя множественные и/или альтернативные компоненты и приспособления. Примерные иллюстрированные компоненты не предназначены быть ограничивающими. Фактически, дополнительные или альтернативные компоненты и/или реализации могут быть использованы.
[0017] Как иллюстрировано на фиг. 1, рассматриваемое транспортное средство 100 включает в себя систему 105 идентификации водителя, которая может объединять идентификации водителя, выполненные посредством множества устройств, в универсальную идентичность водителя относительно эксплуатации транспортного средства. Хотя иллюстрировано как седан, транспортное средство может включать в себя любое пассажирское или коммерческое транспортное средство, такое как легковой автомобиль, грузовик, внедорожник, кроссовер, фургон, минивэн, такси, автобус и т.д. В некоторых возможных подходах транспортное средство является автономным транспортным средством, сконфигурированным, чтобы работать в автономном (например, без водителя) режиме, частично автономном режиме и/или неавтономном режиме.
[0018] Обращаясь к фиг. 2, система 105 идентификации водителя может включать в себя множество модулей 110 идентификации. Каждый модуль 110 идентификации может включать в себя вычислительное устройство, сконфигурированное или запрограммированное, чтобы принимать входные данные, по меньшей мере, от одного датчика 115 транспортного средства. Система 105 идентификации водителя может включать в себя, например, модуль 110A распознавания голоса, модуль 110B распознавания лица, модуль 110C распознавания отпечатка пальца, модуль 110D обнаружения телефона, модуль 110E обнаружения беспроводного устройства, среди прочего. Модуль 110A распознавания голоса может включать в себя любое вычислительное устройство, сконфигурированное или запрограммированное, чтобы принимать входной сигнал от датчика голоса. Модуль 110B распознавания лица может включать в себя любое вычислительное устройство, сконфигурированное или запрограммированное, чтобы принимать входной сигнал от камеры транспортного средства. Модуль 110C распознавания отпечатка пальца может включать в себя любое вычислительное устройство, сконфигурированное или запрограммированное, чтобы принимать входной сигнал от биометрического датчика отпечатка пальца, соединенного с рулевым колесом или ручкой двери транспортного средства. Модуль 110D обнаружения телефона, модуль 110E обнаружения беспроводного устройства, или оба, могут включать в себя любое вычислительное устройство, сконфигурированное или запрограммированное, чтобы принимать входной сигнал от телефонного устройства (например, мобильного телефона), находящегося в рассматриваемом транспортном средстве 100, или брелока ключа рядом или в рассматриваемом транспортном средстве 100. В случае модуля 110E обнаружения беспроводного устройства, связь между мобильным телефоном и системой 105 идентификации водителя может осуществляться в соответствии с Bluetooth® или другим протоколом беспроводной связи. Выходные данные каждого модуля 110 идентификации могут включать в себя, например, прогнозирование известного пользователя (или множества пользователей) и возможно дополнительную информацию. Например, выходные данные могут указывать наиболее вероятного пользователя (или пользователей) и значение достоверности для каждого пользователя. Значение достоверности может указывать достоверность того, что входной сигнал от соответствующего датчика был от данного пользователя.
[0019] Как показано на фиг. 3, каждый модуль 110 идентификации может быть сконфигурирован или запрограммирован, чтобы формировать выходные данные, соответствующие наиболее вероятному пользователю (или группе пользователей) на основе входных сигналов датчиков, принимаемых в этом конкретном модуле. По существу, каждый модуль может быть соединен с возможностью связи с конкретным набором датчиков 115. Конкретный набор является перекрывающимся или неперекрывающимся, означая, что некоторые датчики 115 могут выводить сигналы более чем одному модулю 110 идентификации. Другими словами, некоторые датчики 115 могут выводить сигналы только одному модулю 110 идентификации, в то время как другие датчики 115 могут выводить сигналы множеству модулей 110 идентификации.
[0020] Выходные данные от каждого модуля 110 идентификации (включающие в себя список возможных соответствий и их векторов соответствия или значений достоверности) могут быть предоставлены модулю 120 объединения идентификации водителя (DIFM), встроенному, например, в контроллер 125 (см. фиг. 2). Контроллер 125 может включать в себя вычислительное устройство, запрограммированное, чтобы реализовывать модуль 120 объединения идентификации водителя. Аналогично, модуль 120 объединения идентификации водителя может быть реализован посредством вычислительного устройства, запрограммированного, чтобы взвешивать входные данные, принимаемые от различных модулей 110 идентификации, и формировать выходные данные, которые сообщают другим системам в рассматриваемом транспортном средстве 100 вероятность текущего водителя, ассоциируемого с одним из сохраненных водительских профилей.
[0021] Для каждого водительского профиля значение достоверности может быть выражено в диапазоне от 100% (например, система полностью уверена, что водитель - это конкретный человек) до минус 100% (например, система полностью уверена, что водитель - не конкретный человек). Значение 0% может указывать, что система не может указать с какой-либо достоверностью, является или нет водитель конкретным человеком. Пример таких выходных данных достоверности показан на графике 400 на фиг. 4. Как иллюстрировано, система 105 идентификации водителя назначила значение 83% водителю A, значение -76% водителю B, значение -35% водителю C и значение 11% водителю D. Согласно этим примерным значениям система 105 идентификации водителя может определять, что водитель A вероятно является человеком, эксплуатирующим рассматриваемое транспортное средство 100.
[0022] Каждый модуль 110 идентификации может не в данный момент принимать окончательное решение о том, что водитель является конкретным человеком. Скорее, это может зависеть от каждого конечного элемента, чтобы принимать это решение на основе входных данных от модуля 120 объединения идентификации водителя и отдельной достоверности этого конечного элемента. Фраза "конечный элемент" может ссылаться на конкретную подсистему транспортного средства, которая может использовать водительский профиль, такую как радио, навигационная система, контроллер сиденья и т.д., как разъясняется ниже. Как иллюстрировано в блок-схеме 500 на фиг. 5, поскольку некоторые отдельные модули 110 идентификации могут затрачивать больше времени, чтобы предоставлять входные данные, или могут улучшать свои входные данные со временем (например, система обнаружения голоса или модуль 110A распознавания голоса могут не давать результат до тех пор, пока водитель фактически не заговорит, в то время как модуль 110C распознавания отпечатка пальца может давать результат, как только водитель касается рулевого колеса), модуль 120 объединения идентификации водителя может непрерывно наблюдать за входными данными и предоставлять постоянно обновляемые выходные данные, которые, как ожидается, должны повышать достоверность в одном из водительских профилей со временем и понижать достоверность в других.
[0023] Контроллер 125 может дополнительно включать в себя конечный элемент 130 (см. фиг. 2). Конечный элемент 130 может включать в себя деталь транспортного средства, которой необходимо знать личность текущего водителя для того, чтобы выполнять определенные задачи. Примеры конечных элементов 130 могут включать в себя навигационную систему, развлекательную систему и т.д. В одной реализации контроллер 125 может принимать значение достоверности для каждого пользователя от модуля 120 объединения идентификации водителя и сообщать значения достоверности каждому конечному элементу 130, такому как навигационная система, радиосистема и т.д. Каждый конечный элемент 130 может затем быть запрограммирован, чтобы независимо определять настройки водителя на основе принятой информации.
[0024] По существу, различные конечные элементы 130 могут нуждаться в различных уровнях достоверности в идентификации водителя, чтобы выполнять свои соответствующие задачи для людей, такие как, например, защита конфиденциальности водителя. Защита конфиденциальности может быть важной в контексте совместно используемых транспортных средств типа, например, сервисов проката автомобилей или других сервисов, где посторонние люди могут совместно использовать конкретное транспортное средство. Например, рассматриваемое транспортное средство 100 может не желать раскрывать домашний адрес водителя до тех пор, пока рассматриваемое транспортное средство 100 не будет уверено, что человек, эксплуатирующий рассматриваемое транспортное средство 100, является этим конкретным водителем.
[0025] Пример случая, когда различные уровни достоверности водителя уточняются, представлен в блок-схеме 600 на фиг. 6. Как показано, навигационная система может предоставлять возможность множества предварительных настроек радио для одного водителя (названного водителем A), если модуль 120 объединения идентификации водителя указывает, что он, по меньшей мере, на 50% уверен, что текущий водитель является водителем A, и, по меньшей мере, на -30% уверен, что водитель не является одним из других сохраненных водителей. Даже если контроллер 125 не полностью уверен относительно личности водителя, может не быть сильно проблематичным, если развлекательная система отображает неправильно предварительно заданные радиостанции (т.е., предварительно заданные радиостанции, ассоциированные с другим человеком). Развлекательная система может быть относительно уверена, что она не будет прекращать отображение персональных предварительных настроек радио для одного из других ассоциированных водителей, поскольку он имел достоверность меньше -30%, и существует 80% различия с единственно возможным фактическим водителем. Некорректная идентификация водителя может быть более проблематичной для других систем, однако. Например, когда навигационная система запрашивается об изменении местоположения пункта назначения, предварительно заданного как "работа", она может потребовать более высокую степень достоверности, например, более 90%, что текущий водитель является идентифицированным в настоящее время, и что никто из других водителей более чем на -80% вероятно не должен быть фактическим текущим водителем. В этом случае, если водитель был обнаружен лишь с 70% достоверностью, правильные предварительные настройки радио могут быть отображены, но система может предлагать водителю вручную подтвердить свою личность для того, чтобы изменять предварительно заданный пункт назначения. Альтернативно, система может предлагать водителю вручную подтвердить предварительно заданный пункт назначения для "работы".
[0026] Запрос ручного подтверждения может принимать различные формы, такие как просьба водителю, чтобы выбирать из короткого списка вариантов возможных людей, просьба водителю произнести слово, ранее используемое во время настройки пользовательского профиля и калибровки, просьба ввести отпечаток пальца и т.д. Значения достоверности могут регулироваться после приема ручного ввода подтверждения. Один способ регулировки уровней достоверности может включать в себя повышение уровня достоверности, ассоциированного с личностью водителя до отметки выше пороговой. Поступая таким образом, можно предоставлять возможность конечному элементу 130 регулировать настройки на основе этого водителя и, например, предохранять пользователя от изменения предварительной настройки для конечного элемента 130, например, пункта назначения "работа" в навигационной системе, когда уровень уверенности в личности водителя недостаточно высок. Таким образом, порог достоверности для каждого модуля 110 идентификации может изменяться на основе критичности модуля 110 идентификации, например, более критичные модули 110 идентификации могут иметь более высокие пороговые значения. Таким образом, действия могут быть автоматически предприняты модулем 110 идентификации, если пороговое значение пересечено. Если пороговое значение не пересекается, однако, модуль 110 идентификации может требовать дополнительного ввода от водителя, чтобы выполнять действие или повышать значение достоверности выше порогового. Отделение конечного решения для водителя также имеет дополнительное преимущество в том, что некоторые конечные элементы 130 могут иметь возможность получать некоторые заключения на основе прогнозов вместо этого, как разъясняется ниже.
[0027] Если конечные элементы 130 определяют значения достоверности ниже их соответствующих пороговых уровней и не хранят критические персональные данные пользователя, конечный элемент 130 может идентифицировать наиболее вероятного водителя или водителей на основе значений достоверности (например, верхние 3 кандидата) и регулировать настройки транспортного средства на основе их профилей. Например, радиосистема, обсужденная выше со ссылкой на фиг. 6, может выбирать станцию, которая является общей между профилями наиболее вероятных водителей.
[0028] Со ссылкой на фиг. 2 и 7, контроллер 125 может дополнительно включать в себя модуль 135 обучения, запрограммированный, чтобы предоставлять возможность первоначальной калибровки идентификации водителя. Модуль 135 обучения может включать в себя любое вычислительное устройство, запрограммированное, чтобы калибровать каждый из отдельных модулей 110 идентификации. Когда система используется первоначально, водитель может быть приглашен посредством пользовательского интерфейса 140 транспортного средства (см. фиг. 3), такого как интерфейс "человек-машина" (HMI), чтобы предоставлять первоначальную "идентификацию водителя", которая может быть сохранена в водительском профиле. Водительский профиль может быть сохранен в запоминающем устройстве, доступном контроллеру 125. Например, водительский профиль может быть сохранен в базе данных 145 водителей. Посредством построения водительских профилей атрибуты водителя могут быть изучены, и каждый модуль может быть откалиброван на основе изученных атрибутов водителя. Если водитель одобряет первоначальную идентификацию водителя, первоначальный контролируемый обучающий запрос может быть выдан модулем 135 обучения отдельным системам распознавания или модулям 110 идентификации. Этот запрос может содержать ID выбранного водительского профиля и инструкции, чтобы выполнять первоначальное обучение. Например, основное или эталонное изображение водителя может быть сохранено для использования в последующих обнаружениях. Когда это обучение заканчивается, каждая из систем идентификации может начинать непрерывно формировать вектор идентификации водителя. Вектор идентификации водителя может включать в себя уровни достоверности, обсужденные выше.
[0029] При последующих эксплуатациях рассматриваемого транспортного средства 100 модуль 135 обучения может наблюдать за выводом каждого модуля 110 идентификации. Если вектор (т.е., уровень достоверности) указывает, по меньшей мере, среднюю-высокую вероятность того, что водитель является известным человеком, непрерывный неконтролируемый обучающий запрос может выдаваться отдельному модулю 110 идентификации, предоставляющий возможность каждому модулю модифицировать существующие данные, связанные с идентификатором текущего водительского профиля. Таким образом, система транспортного средства может динамически эволюционировать с изменениями внешнего вида известного водителя. Например, водительский профиль в модуле 110B распознавания лица может динамически эволюционировать, когда мужчина-водитель отращивает бороду или мужчина или женщина-водитель изменяет свою прическу или цвет волос. Обучающий запрос может не выдаваться, если вероятность конкретного, известного водителя слишком низкая (например, ниже порогового значения).
[0030] Дополнительно, если подсистема 130 не принимает достаточно высокую достоверность в одном конкретном водителе, все еще такую информацию необходимо продолжать обрабатывать (например, чтобы сохранять новое "домашнее местоположение", навигационная система должна иметь четкое представление, что она знает, кто является текущим водителем), система транспортного средства может предлагать водителю подтвердить его или ее личность. Приглашение, ответ, или и то, и другое, могут быть выполнены через, например, пользовательский ввод, который система транспортного средства может использовать, чтобы корректировать значение достоверности. После того как водитель выполняет это ручное подтверждение, главный контролируемый обучающий запрос может быть передан от обучающей системы, предоставляющий возможность отдельным системам выполнять основное повторное обучение, чтобы быстро приспосабливаться к обновленному водительскому профилю.
[0031] Фиг. 7 иллюстрирует примерный процесс 700, который может быть выполнен посредством модуля 135 обучения. Процесс 700 может включать в себя этап 705 обнаружения, когда пользователь садится в рассматриваемое транспортное средство 100. На этапе 710 решения модуль 135 обучения может оценивать уровень достоверности пользователя. Если уровень достоверности ассоциируется с неизвестным пользователем, процесс 700 может продолжаться на этапе 715. Если пользователь известен, но существует низкий уровень достоверности, процесс 700 может продолжаться на этапе 725. Если пользователь известен со средним или высоким уровнем достоверности, процесс 700 может продолжаться на этапе 735. На этапе 715 модуль 135 обучения может начинать первоначальное контролируемое обучение. На этапе 720 модуль 135 обучения может создавать новую запись в базе данных 145 водителей для нового пользователя. Процесс 700 может переходить назад к этапу 710 решения. На этапе 725 модуль 135 обучения может проводить контролируемое обучение. На этапе 730 пользовательский профиль в базе данных 145 водителей может быть обновлен новой пользовательской информацией, собранной на этапе 725. Процесс 700 может возвращаться к этапу 710. На этапе 735 модуль 135 обучения может выполнять непрерывное неконтролируемое обучение, как обсуждалось выше. Процесс 700 может продолжать выполняться до тех пор, пока, например, рассматриваемое транспортное средство 100 не будет выключено.
[0032] В некоторых реализациях модуль 150 прогнозирования (см. фиг. 2) контроллера 125 может принимать и использовать различные достоверности идентификации водителя от модуля 120 объединения идентификации водителя для того, чтобы предоставлять значение для менее критичной функции даже в "плохих случаях". В качестве примера, контроллер 125 может прогнозировать, что его уровень достоверности в обнаружении четырех различных водителей является {A: 42%, B: 41%, C: -28%, D: -98%}. В этом случае, невозможно для контроллера 125 определять, является ли фактический водитель водителем A или водителем B, хотя, в этом примере, абсолютно ясно, что фактический водитель не является ни водителем C, ни водителем D. Радиомодуль, поэтому, может не устанавливать все предварительно заданные радиостанции, а может настраивать радио на конкретную главную станцию, если он определяет, что и водитель A, и водитель B имеют одинаковую "главную станцию" по умолчанию. Контроллер 125 может, поэтому, настраивать радио на главную станцию, обеспечивающую персонализацию либо для водителя A, либо для водителя B, даже если он не может правильно установить все предварительные настройки. Другими словами, контроллер 125 может выбирать предварительную настройку радио, которая является общей как для водителя A, так и для водителя B. Аналогично, похожая базовая регулировка сиденья посредством модуля сиденья может быть выполнена, чтобы обеспечивать настройку сиденья, которая является общей как для водителя A, так и для водителя B, если водитель A и водитель B имеют аналогичный физический размер тела, который отличается от размеров тела водителя C и водителя D. В одном возможном подходе контроллер 125 может использовать настройку, которая является общей для обоих водителей в коротком списке, в то время как в альтернативном примере контроллер 125 может использовать настройку, которая является средней (например, средним размером тела) водителей в коротком списке.
[0033] Фиг. 8 изображает примерный процесс 800 объединения, который может быть выполнен посредством системы объединения идентификации водителя, описанной выше. Как иллюстрировано, модуль 120 объединения идентификации водителя может принимать сигналы от различных модулей 110 идентификации, расположенных в рассматриваемом транспортном средстве 100. На этапе 805 каждый модуль 110 идентификации может собирать информацию о водителе. На этапе 810, с помощью информации, собранной на этапе 805, каждый модуль может определять была ли идентифицирована определенная характеристика водителя. Если так, модуль 110 идентификации может выводить сигнал, включающий в себя сигнал, представляющий идентификацию водителя, модулю 120 объединения идентификации водителя. Идентификация водителя может быть представлена через, например, уровни достоверности того, что водитель является конкретным человеком. Если водитель не может быть идентифицирован посредством конкретного модуля, процесс 800, по меньшей мере, для этого модуля может возвращаться к этапу 805, так что модуль 110 идентификации может продолжать собирать информацию о водителе до тех пор, пока водитель не сможет быть идентифицирован. На этапе 815 модуль 120 объединения идентификации водителя может собирать и объединять идентификации, выполненные посредством идентификационных модулей 110 на этапе 810. В некоторых случаях, модуль 120 объединения идентификации водителя может собирать уровни достоверности, ассоциированные с каждым возможным водителем, применять вес к уровням достоверности и определять, кто может быть водителем, на основе совокупных уровней достоверности. На этапе 820 модуль 120 объединения идентификации водителя может выводить сигнал совокупного уровня достоверности, указывающий наиболее вероятную идентификацию водителя, на основе информации, собранной на этапе 805. Отдельные конечные элементы 130 могут принимать сигнал совокупного уровня достоверности и определять личность водителя соответствующим образом.
[0034] В качестве примера, предположим, что водитель A садится в рассматриваемое транспортное средство 100, оснащенное системой объединения идентификации водителя, использующей распознавание брелока для ключей, распознавание лиц, обнаружение беспроводного устройства и распознавание голоса. Водитель A может совместно использовать рассматриваемое транспортное средство 100 с тремя другими людьми: водителем B, водителем C и водителем D. Брелок для ключей, используемый водителем A, используется только водителем A и водителем B. Система может поднимать уровни достоверности того, что эти два водителя являются текущим водителем, в то же время, понижая достоверность в других двух водительских профилях, при приеме сигнала, идентифицирующего брелок ключа как брелок ключа, используемый водителем A или водителем B. Когда водитель A садится в автомобиль, его телефон может быть распознан, таким образом, снова, достоверность его профиля повышается, в то время как другие понижаются. Нажимная кнопка запуска может также служить в качестве считывателя отпечатка пальца. Когда водитель A запускает рассматриваемое транспортное средство 100, кнопка запуска может сканировать отпечаток пальца водителя A. После идентификации как принадлежащий водителю A, достоверность профиля, ассоциированная с водителем A, может быть повышена, в то время как достоверности профилей, ассоциированные с другими возможными водителями, могут быть понижены. Поскольку считывание отпечатка пальца может быть более существенным способом идентификации, оно добавляет большую величину уверенности в водителе A, а уровни достоверности для B, C и D падают больше, относительно некоторых из других выполняемых способов идентификации. Камера, которая может быть расположена в рассматриваемом транспортном средстве 100 за колонкой рулевого управления, может захватывать изображение водителя A. Способ распознавания лиц может выполняться по захваченному изображению, чтобы находить совпадение. Система распознавания лица может распознавать водителя как водителя A, таким образом, уровень достоверности, ассоциированный с водителем A, может быть повышен снова, в то время как другие понижаются. В этот момент, система может иметь высокую степень уверенности в водителе A, и что другие водители не используют автомобиль. Водитель A может говорить, чтобы выдавать команды активируемой голосом информационно-развлекательной системе. Система распознавания голоса может анализировать голосовые данные водителя A, например, сопоставляя характеристики голоса с профилем водителя A. В этот момент уровень достоверности, ассоциированный с водителем A, может теперь достигать максимально возможных 100%, в то время как другие гораздо ближе к -100%. В некоторый момент во время вождения телефон водителя A может отсоединяться от рассматриваемого транспортного средства 100, например, из-за потери энергии аккумулятора, так что телефон больше не виден для автомобиля. Уровень уверенности в водителе A может быть понижен в результате. Уровень достоверности, тем не менее, может оставаться относительно высоким благодаря другим системам, которые присутствуют. Таблица 1 показывает, как модуль 120 объединения идентификации водителя может размещать информацию, когда множество модулей 110 идентификации начинают захватывать информацию или идентифицировать пользователя.
|
|
[0035] Весомость или вклад каждого отдельного модуля для модуля 120 объединения идентификации водителя может корректироваться на основе его отдельной критичности, чтобы уменьшать некорректную идентификацию водителя. С помощью модуля 135 адаптивного обучения система может адаптироваться к пользователю, даже когда его внешний вид изменяется. Таким образом, объединение выходных данных множества технологий идентификаций создает более точную систему 105 идентификации водителя. Кроме того, некоторые модули 110 идентификации могут быть запрограммированы или сконфигурированы, чтобы собирать информацию о водителе с более высокой определенностью, чем другие модули 110 идентификации. Например, модуль 110C распознавания отпечатка пальца или модуль 110D обнаружения телефона могут быть запрограммированы, чтобы идентифицировать конкретного водителя более конкретно, чем, например, распознавание водителя из брелока ключа, поскольку водитель более вероятно может одалживать свой брелок ключа, чем свой телефон. Конечно, отпечатки пальцев водителя не будут изменяться. Значения в Таблице 1, поэтому, могут быть взвешены, чтобы предоставлять больше достоверности модулю 110C распознавания отпечатка пальца и модулю распознавания телефона, чем одному или более другим модулям 110 идентификации.
[0036] В целом, описанные вычислительные системы и/или устройства могут применять любую из множества компьютерных операционных систем, включающих в себя, но не считающихся ограниченными, версии и/или разновидности операционной системы Ford Sync®, операционной системы Microsoft Windows®, операционной системы Unix (например, операционной системы Solaris®, распространяемой корпорацией Oracle из Редвуд Шорс, Калифорния), операционной системы AIX UNIX, распространяемой компанией International Business Machines из Армонка, Нью-Йорк, операционной системы Linux, операционных систем Mac OS X и iOS, распространяемых компанией Apple Inc. из Купертино, Калифорния, BlackBerry OS, распространяемой компанией Blackberry Ltd из Ватерлоо, Канада, и операционной системы Android, разрабатываемой компанией Google Inc. открытым альянсом мобильных телефонов. Примеры вычислительных устройств включают в себя, без ограничения, бортовой компьютер транспортного средства, компьютерную рабочую станцию, сервер, настольный компьютер, ноутбук, портативный или карманный компьютер или некоторую другую вычислительную систему и/или устройство.
[0037] Вычислительные устройства, как правило, включают в себя компьютерно-исполняемые инструкции, при этом инструкции могут исполняться одним или более вычислительными устройствами, такими как перечисленные выше. Компьютерно-исполняемые инструкции могут быть скомпилированы или интерпретированы из компьютерных программ, созданных с помощью множества языков и/или технологий программирования, включающих в себя, без ограничения, и либо отдельно, либо в комбинации, Java™, C, C++, Visual Basic, Java Script, Perl и т.д. В целом, процессор (например, микропроцессор) принимает инструкции, например, из памяти, компьютерно-читаемого носителя и т.д. и выполняет эти инструкции, таким образом, выполняя один или более процессов, включающих в себя один или более процессов, описанных в данном документе. Такие инструкции и другие данные могут быть сохранены и передаваться с помощью множества компьютерно-читаемых носителей.
[0038] Компьютерно-читаемый носитель (также называемый процессорно-читаемым носителем) включает в себя любой нетранзиторный (например, материальный) носитель, который участвует в предоставлении данных (например, инструкций), которые могут быть считаны компьютером (например, процессором компьютера). Такой носитель может принимать многие формы, включающие в себя, но не только, энергонезависимые носители и энергозависимые носители. Энергонезависимые носители могут включать в себя, например, оптические или магнитные диски и другое постоянное запоминающее устройство. Энергозависимые носители могут включать в себя, например, динамическое оперативное запоминающее устройство (DRAM), которое типично составляет основную память. Такие инструкции могут быть переданы посредством одной или более сред передачи данных, включающих в себя коаксиальные кабели, медный провод и оптические волокна, включающие в себя провода, которые содержат системную шину, соединенную с процессором компьютера. Обычные формы компьютерно-читаемых носителей включают в себя, например, гибкий диск, дискету, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM, DVD, любой другой оптический носитель, перфорационную карту, бумажную ленту, любой другой физический носитель с рисунками отверстий, RAM, PROM, EPROM, FLASH-EEPROM, любую другую микросхему памяти или картридж, или любой другой носитель, с которого компьютер может выполнять считывание.
[0039] Базы данных, банки данных или другие хранилища данных, описанные в данном документе, могут включать в себя различные виды механизмов для хранения, осуществления доступа и извлечения различных видов данных, включающие в себя иерархическую базу данных, набор файлов в файловой системе, прикладную базу данных в закрытом формате, систему управления реляционной базой данных (RDBMS) и т.д. Каждое такое хранилище данных, как правило, включено в вычислительное устройство, применяющее компьютерную операционную систему, такую как одна из упомянутых выше, и к нему осуществляется доступ через сеть любым одним или более из множества способов. Файловая система может быть доступна из операционной системы компьютера и может включать в себя файлы, сохраненные в различных форматах. RDBMS, как правило, применяет язык структурированных запросов (SQL) в дополнение к языку для создания, хранения, редактирования и выполнения сохраненных процедур, такой как язык PL/SQL, упомянутый выше.
[0040] В некоторых примерах элементы системы могут быть реализованы как компьютерно-читаемые инструкции (например, программное обеспечение) на одном или более вычислительных устройствах (например, серверах, персональных компьютерах и т.д.), сохраненные на считываемых компьютером носителях, ассоциированных с ним (например, дисках, запоминающих устройствах и т.д.). Компьютерный программный продукт может содержать такие инструкции, сохраненные на считываемых компьютером носителях, для выполнения функций, описанных в данном документе.
[0041] Что касается процессов, систем, способов, эвристических правил и т.д., описанных в данном документе, должно быть понятно, что, хотя этапы таких процессов и т.д. были описаны как происходящие согласно некоторой упорядоченной последовательности, такие процессы могут быть применены на практике с помощью описанных этапов, выполняемых в порядке, отличном от порядка, описанного в данном документе. Дополнительно должно быть понятно, что некоторые этапы могут выполняться одновременно, что другие этапы могут быть добавлены, или что некоторые этапы, описанные в данном документе, могут быть опущены. Другими словами, описания процессов в данном документе предоставлены с целью иллюстрации некоторых вариантов осуществления и не должны никоим образом истолковываться как ограничивающие формулу изобретения.
[0042] Соответственно, должно быть понятно, что вышеприведенное описание предназначено быть иллюстративным, а не ограничивающим. Многие варианты осуществления и применения, отличные от предоставленных примеров, будут очевидны по прочтении вышеприведенного описания. Рамки должны быть определены, но со ссылкой на вышеприведенное описание, но должны вместо этого быть определены со ссылкой на прилагаемую формулу изобретения, вместе с полными рамками эквивалентов, к которым такие пункты формулы приписаны. Ожидается и предполагается, что будущие разработки произойдут в технологиях, обсужденных в данном документе, и что раскрытые системы и способы будут включены в такие будущие варианты осуществления. Суммируя, должно быть понятно, что применимость способна к модификации и изменению.
[0043] Все термины, используемые в формуле изобретения, предполагают получение их обычных значений, которые понятны специалистам, осведомленных в технологиях, описанных в данном документе, пока явное указание на противоположное не будет выполнено в данном документе. В частности, использование сингулярных артиклей, таких как "a", "the", "упомянутый" и т.д., должно читаться, чтобы перечислять один или более указанных элементов, пока формула изобретения не перечислит явное ограничение до противоположного.
[0044] Реферат изобретения предоставлен, чтобы предоставлять возможность читателю быстро выяснить природу технического изобретения. Предполагается вместе с пониманием, что он не будет использоваться, чтобы интерпретировать или ограничивать рамки или смысл формулы изобретения. Кроме того, в предшествующем подробном описании может быть видно, что различные признаки сгруппированы вместе в различных вариантах осуществления с целью упорядочивания открытия. Этот способ открытия не должен быть интерпретирован как отражающий замысел того, что заявленные варианты осуществления требуют больше признаков, чем точно перечислено в каждом пункте формулы. Скорее, как отражает последующая формула, изобретенный предмет изучения лежит в менее чем всех признаках одного раскрытого варианта осуществления. Таким образом, прилагаемая формула изобретения тем самым включается в подробное описание, причем каждый пункт является независимым как отдельно заявленный предмет изобретения.
Корпус рулевой рейки с поперечными сужениями
Усовершенствованное прессовое соединение корпуса зубчатой рейки
Рулевой клапан с планетарной передачей
Способ управления двигателем, выполненным с возможностью работы на газообразном топливе, двигатель, имеющий цилиндры, выполненные с возможностью сжигания газообразного топлива и двигатель, выполненный с возможностью сжигания газообразного топлива
Способ проверки системы продувки паров транспортного средства, транспортное средство с гибридным приводом и способ проверки системы продувки паров на борту транспортного средства
Устройство и способ инжекционного формования вспененных полимеров
Транспортное средство (варианты)
Двигатель внутреннего сгорания с турбонагнетателем, приводная система и способ работы двигателя внутреннего сгорания с турбонагнетателем (варианты)
Блок цилиндров (варианты) и способ работы системы смазки в двигателе
Несущий каркас (варианты)
Способ моделирования дорожных характеристик в регионе, в котором движется транспортное средство, и система для его осуществления
Идентификация водителя транспортного средства
Способ и система транспортного средства для осуществления скрытного вызова оператора аварийно-спасательных служб (варианты)
Сообщение о событии и воссоздание события на основе краудсорсинга
Транспортное средство с гиперлапс-видео и социальные сети

