Результат интеллектуальной деятельности: СИСТЕМА ОРИЕНТИРОВАНИЯ ПЕРЕМЕЩАЕМОЙ НА БОРТУ ПИЛОТИРУЕМОГО КОРАБЛЯ АППАРАТУРЫ
Вид РИД
Изобретение
Изобретение относится к аэрокосмической технике и может быть использовано для обеспечения ориентирования экипажем пилотируемого корабля аппаратуры, перемещаемой относительно движущегося корабля.
Известна система управления телевизионным видеоспектральным комплексом КА (патент РФ 2068801, МПК 6: B64G 9/00), содержащая функциональные блоки автоматического наведения и отслеживания заданных целей, координаты которых вводятся в систему, функциональные блоки управления наведением поворотной платформы и переориентации комплекса аппаратуры от экипажа и функциональные блоки контроля и квитирования управляющей информации, в том числе система-прототип включает: автоматическую стабилизированную платформу с целевой научной аппаратурой и телевизионной системой, блок задания параметров движения КА, блок задания текущей ориентации КА, блоки задания координат целей в инерциальной, орбитальной и гринвичской системах координат, наземную и бортовую телефонно-телеграфные системы, блок синхронизации приема телефонно-телеграфных сообщений, блоки формирования углового положения, блок определения угловой скорости наведения, блок формирования управляющих воздействий. Данная система реализует способ управления, который включает наведение и отслеживание целей, при которых выполняется переориентация оси визирования установленной на поворотной платформе телевизионной и научной аппаратуры на выбираемую в реальном времени по ТВ-изображению цель с последующим автоматическим отслеживанием цели, в том числе выполняется определение пространственного положения прибора наведения относительно КА, задание координат целей, определение положения целей относительно прибора наведения, расчет углов поворота прибора наведения и повороты прибора наведения.
К недостаткам данной системы относится то, что она позволяет наводиться только на цели, с одной стороны, ограниченные диапазоном углов поворота поворотной платформы, а с другой стороны, ограниченные попаданием в текущий кадр ТВ-изображения, который, кроме упомянутого ограничения по диапазону углов поворота поворотной платформы, имеет ограниченный охват, определяемый полем зрения ТВ-камеры. При этом сам факт размещения аппаратуры наведения на поворотной платформе ограничивает свободу перемещения аппаратуры при ее нацеливании и сопровождении цели экипажем КА.
В качестве системы-прототипа выбрана система ориентирования перемещаемого в пилотируемом аппарате прибора (патент РФ 2531781, заявка №2012134959/11 от 16.08.2012, МПК (2006.01): F41G 3/00 B64G 1/66 - прототип), включающая синхронизатор, блок определения пространственного положения прибора относительно пилотируемого аппарата, блок определения положения ориентира относительно прибора, блок расчета команд на поворот прибора, два приемопередающих устройства, установленные соответственно на пилотируемом аппарате и на приборе, блок определения текущего положения ориентира относительно пилотируемого аппарата, не менее чем три ультразвуковых излучателя и не менее чем один датчик температуры, установленные на приборе, не менее чем три ультразвуковых приемника и не менее чем один датчик температуры, установленные на пилотируемом аппарате, блок формирования команд управления излучателями, контроллеры, блок усиления сигналов, блок автоматической регулировки усиления, многоканальный аналого-цифровой преобразователь, блок измерения времени задержки сигналов и блок воспроизведения команд на поворот прибора, при этом входы ультразвуковых излучателей соединены с выходами блока формирования команд управления излучателями, вход которого соединен с первым выходом первого контроллера, второй выход и первый и второй входы которого соединены с соответственно входом и выходом приемопередающего устройства, установленного на приборе, и выходом датчика температуры, установленного на приборе, причем выходы ультразвуковых приемников соединены с входами блока усиления сигналов, выходы которого соединены с входами блока автоматической регулировки усиления, выходы которого соединены с входами многоканального аналого-цифрового преобразователя, выход которого соединен с первым входом блока измерения времени задержки сигналов, второй вход которого соединен с выходом синхронизатора, который также соединен с первым входом второго контроллера, второй вход и первый и второй выходы которого соединены с соответственно выходом и входом приемопередающего устройства, установленного на пилотируемом аппарате, и первым входом блока определения пространственного положения прибора относительно пилотируемого аппарата, второй и третий входы и выход которого соединены с соответственно выходом блока измерения времени задержки сигналов, выходом датчика температуры, установленного на пилотируемом аппарате, и входом блока определения положения ориентира относительно прибора, другой вход и выход которого соединены с соответственно выходом блока определения текущего положения ориентира относительно пилотируемого аппарата и входом блока расчета команд на поворот прибора, выход которого соединен с входом блока воспроизведения команд на поворот прибора. Система-прототип обеспечивает возможность оператору выполнять ориентирование/наведение прибора, свободно перемещаемого внутри пилотируемого корабля и не имеющего с ним механической связи.
К недостаткам системы-прототипа относится то, что она предусматривает ручное управление работой перемещаемой ориентируемой аппаратуры, что может привести к ошибочному или несвоевременному функциональному задействованию аппаратуры, что в свою очередь может привести к потере уникальных целевых данных и/или регистрации аппаратурой данных, которые являются неликвидными. Такая ситуация может возникать как следствие, например, возможной технологической несогласованности в функциональной работе перемещаемой аппаратуры и используемых бортовых систем пилотируемого корабля.
Задачей, на решение которой направлено настоящее изобретение, является обеспечение высокоточного целевого ориентирования перемещаемой на борту пилотируемого корабля аппаратуры.
Технический результат, достигаемый при осуществлении настоящего изобретения, заключается в обеспечении гарантированного целевого управления функционированием аппаратуры, свободно перемещаемой относительно пилотируемого корабля и ориентируемой по задаваемым ориентирам.
Технический результат достигается тем, система ориентирования перемещаемой на борту пилотируемого корабля аппаратуры, включающая блок определения текущего положения ориентира относительно пилотируемого корабля, не менее чем три ультразвуковых излучателя и датчик температуры, установленные на перемещаемой аппаратуре, не менее чем три ультразвуковых приемника, установленные на пилотируемом корабле, блок преобразования сигналов, блок формирования команд управления излучателями, контроллеры, два приемо-передающих устройства, установленные на соответственно перемещаемой аппаратуре и пилотируемом корабле, блок измерения времени задержки сигналов, синхронизатор, блок определения пространственного положения перемещаемой аппаратуры относительно пилотируемого корабля, блок определения положения ориентира относительно перемещаемой аппаратуры, при этом входы ультразвуковых излучателей соединены с выходами блока формирования команд управления излучателями, вход которого соединен с первым выходом первого контроллера, второй выход и первый и второй входы которого соединены с соответственно входом и выходом приемопередающего устройства, установленного на перемещаемой аппаратуре, и выходом датчика температуры, причем выходы ультразвуковых приемников соединены с входами блока преобразования сигналов, выход которого соединен с первым входом блока измерения времени задержки сигналов, второй вход которого соединен с выходом синхронизатора, который также соединен с первым входом второго контроллера, второй вход и первый и второй выходы которого соединены с соответственно выходом и входом приемо-передающего устройства, установленного на пилотируемом корабле, и первым входом блока определения пространственного положения перемещаемой аппаратуры относительно пилотируемого корабля, второй вход и выход которого соединены с соответственно выходом блока измерения времени задержки сигналов и первым входом блока определения положения ориентира относительно перемещаемой аппаратуры, второй вход которого соединен с выходом блока определения текущего положения ориентира относительно пилотируемого корабля, в отличие от прототипа дополнительно содержит блок задания каталога ориентиров, блок выбора текущего ориентира, блок задания оси ориентирования перемещаемой аппаратуры, установленный на перемещаемой аппаратуре блок отображения положения ориентира относительно оси ориентирования перемещаемой аппаратуры, блок задания параметров требуемого положения ориентира относительно оси ориентирования перемещаемой аппаратуры, блок сравнения, блок формирования команд управления перемещаемой аппаратурой, причем блок определения положения ориентира относительно перемещаемой аппаратуры выполнен в виде блока определения положения ориентира относительно оси ориентирования перемещаемой аппаратуры, при этом первый и второй выходы и с первого по четвертый входы блока выбора текущего ориентира соединены с соответственно входом блока определения текущего положения ориентира относительно пилотируемого корабля, входом и выходом блока задания каталога ориентиров, выходом блока сравнения, выходом блока определения пространственного положения перемещаемой аппаратуры относительно пилотируемого корабля и выходом блока задания оси ориентирования перемещаемой аппаратуры, который также соединен с третьим входом блока определения положения ориентира относительно оси ориентирования перемещаемой аппаратуры, выход которого соединен со входом блока сравнения, другой вход и выход которого соединены с соответственно выходом блока задания параметров требуемого положения ориентира относительно оси ориентирования перемещаемой аппаратуры и входом блока формирования команд управления перемещаемой аппаратурой, выход которого и выход блока определения положения ориентира относительно оси ориентирования перемещаемой аппаратуры через второй контроллер, приемо-передающие устройства, установленные на пилотируемом корабле и перемещаемой аппаратуре, и первый контроллер соединены с соответственно перемещаемой аппаратурой и блоком отображения положения ориентира относительно оси ориентирования перемещаемой аппаратуры.
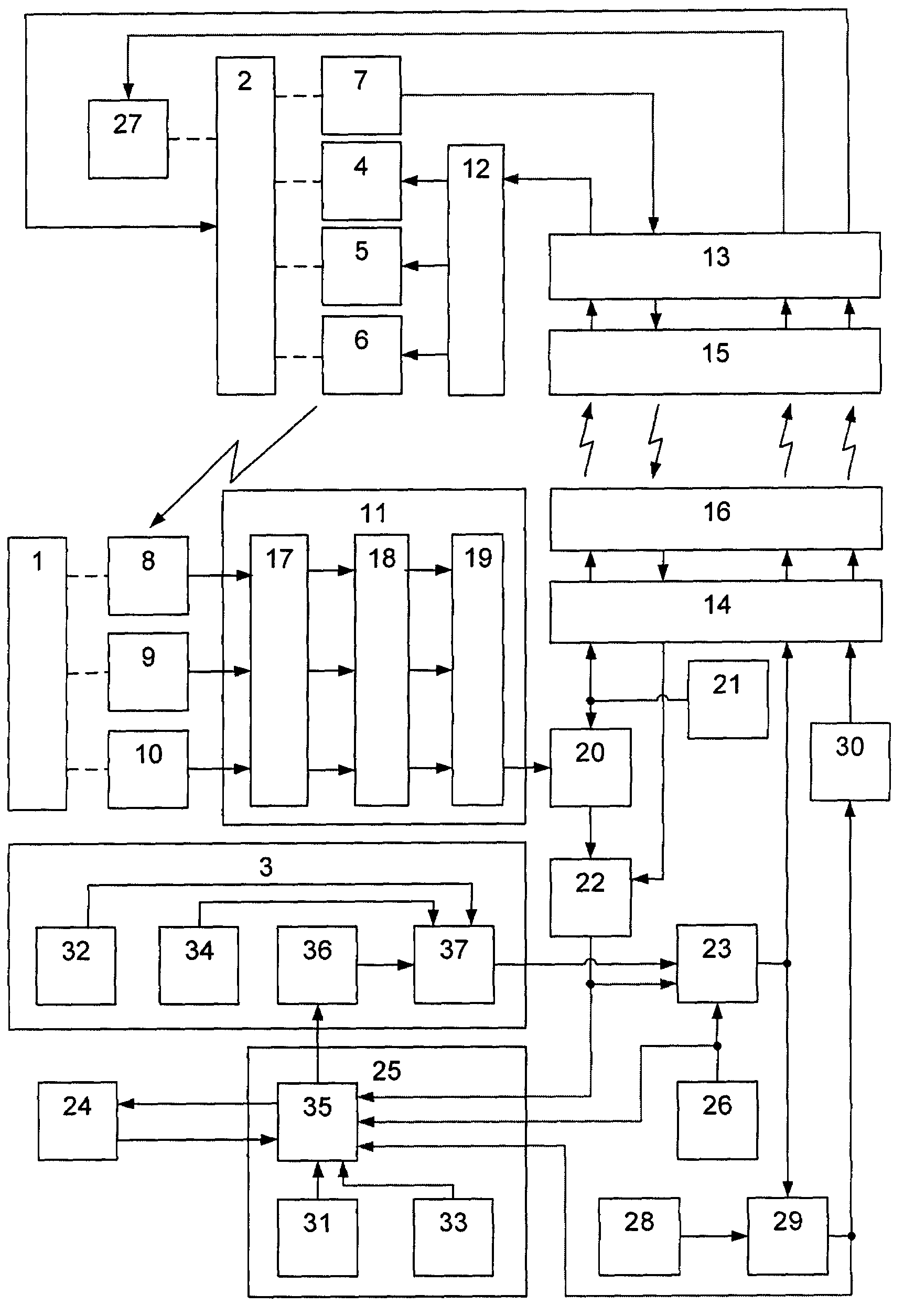
На рисунке представлена блок-схема, поясняющая предлагаемую систему, и введены следующие обозначения:
1 - пилотируемый корабль (ПК);
2 - перемещаемая аппаратура (ПА);
3 - блок определения текущего положения ориентира относительно пилотируемого корабля;
4, 5, 6 - ультразвуковые излучатели;
7 - датчик температуры;
8, 9, 10 - ультразвуковые приемники;
11 - блок преобразования сигналов;
12 - блок формирования команд управления излучателями;
13, 14 - первый и второй контроллеры соответственно;
15, 16 - приемо-передающие устройства, установленные на перемещаемой аппаратуре и на пилотируемом корабле соответственно;
17 - блок усиления сигналов;
18 - блок автоматической регулировки усиления;
19 - многоканальный аналого-цифровой преобразователь;
20 - блок измерения времени задержки сигналов;
21 - синхронизатор;
22 - блок определения пространственного положения перемещаемой аппаратуры относительно пилотируемого корабля;
23 - блок определения положения ориентира относительно оси ориентирования перемещаемой аппаратуры;
24 - блок задания каталога ориентиров;
25 - блок выбора текущего ориентира;
26 - блок задания оси ориентирования перемещаемой аппаратуры;
27 - блок отображения положения ориентира относительно оси ориентирования перемещаемой аппаратуры;
28 - блок задания параметров требуемого положения ориентира относительно оси ориентирования перемещаемой аппаратуры;
29 - блок сравнения;
30 - блок формирования команд управления перемещаемой аппаратурой;
31, 32 - блоки определения положения центра масс пилотируемого корабля;
33, 34 - блоки определения ориентации пилотируемого корабля; 35-блок определения координат текущего ориентира относительно планеты;
36 - блок запоминания координат текущего ориентира;
37 - вычислитель.
Опишем функционирование предлагаемой системы.
Для измерения шести координат пространственного положения ориентируемого прибора - трех линейных и трех угловых параметров -необходимо использовать не менее трех ультразвуковых излучателей, размещенных на перемещаемой (ориентируемой) аппаратуре, и не менее трех ультразвуковых приемников, размещенных на пилотируемом корабле (ПК). Описание предлагаемой системы осуществляем при использовании в системе трех ультразвуковых излучателей, установленных на перемещаемой аппаратуре (ПА), и трех ультразвуковых приемников, установленных на ПК.
Измерения от датчика температуры используются для определения текущей скорости распространения ультразвуковых сигналов между излучателями и приемниками.
В таком исполнении система ориентирования перемещаемой на борту пилотируемого корабля аппаратуры содержит блок определения текущего положения ориентира относительно пилотируемого корабля 3, три ультразвуковых излучателя 4, 5, 6 и датчик температуры 7, установленные на перемещаемой аппаратуре, три ультразвуковых приемника 8, 9, 10, установленные на пилотируемом корабле, блок преобразования сигналов 11, блок формирования команд управления излучателями 12, первый и второй контроллеры 13, 14, два приемо-передающих устройства 15, 16, установленные на соответственно перемещаемой аппаратуре и пилотируемом корабле, блок измерения времени задержки сигналов 20, синхронизатор 21, блок определения пространственного положения перемещаемой аппаратуры относительно пилотируемого корабля 22, блок определения положения ориентира относительно оси ориентирования перемещаемой аппаратуры 23, блок задания каталога ориентиров 24, блок выбора текущего ориентира 25, блок задания оси ориентирования перемещаемой аппаратуры 26, установленный на перемещаемой аппаратуре 2 блок отображения положения ориентира относительно оси ориентирования перемещаемой аппаратуры 27, блок задания параметров требуемого положения ориентира относительно оси ориентирования перемещаемой аппаратуры 28, блок сравнения 29, блок формирования команд управления перемещаемой аппаратурой 30.
Ультразвуковые излучатели 4, 5, 6 размещены в разнесенных точках с известными координатами в связанной с перемещаемой аппаратурой 2 системе координат. Входы ультразвуковых излучателей 4, 5, 6 соединены с выходами блока формирования команд управления излучателями 12.
Вход блока формирования команд управления излучателями 12 соединен с первым выходом первого контроллера 13.
Второй выход и первый и второй входы первого контроллера 13 соединены с соответственно входом и выходом приемо-передающего устройства 15, установленного на перемещаемой аппаратуре 2, и выходом датчика температуры 7.
Ультразвуковые приемники 8, 9, 10 размещены в разнесенных точках с известными координатами в связанной с ПК 1 системе координат.
Выходы ультразвуковых приемников 8, 9, 10 соединены с входами блока преобразования сигналов 11.
Выход блока преобразования сигналов 11 соединен с первым входом блока измерения времени задержки сигналов 20.
Второй вход блока измерения времени задержки сигналов 20 соединен с выходом синхронизатора 21.
Выход синхронизатора 21 также соединен с первым входом второго контроллера 14.
Второй вход и первый и второй выходы второго контроллера 14 соединены с соответственно выходом и входом приемо-передающего устройства 16, установленного на пилотируемом корабле 1, и первым входом блока определения пространственного положения перемещаемой аппаратуры относительно пилотируемого корабля 22.
Второй вход и выход блока определения пространственного положения перемещаемой аппаратуры относительно пилотируемого корабля 22 соединены с соответственно выходом блока измерения времени задержки сигналов 20 и первым входом блока определения положения ориентира относительно перемещаемой аппаратуры 23.
Второй вход блока определения положения ориентира относительно перемещаемой аппаратуры 23 соединен с выходом блока определения текущего положения ориентира относительно пилотируемого корабля 3.
Первый и второй выходы и с первого по четвертый входы блока выбора текущего ориентира 25 соединены с соответственно входом блока определения текущего положения ориентира относительно пилотируемого корабля 3, входом и выходом блока задания каталога ориентиров 24, выходом блока сравнения 29, выходом блока определения пространственного положения перемещаемой аппаратуры относительно пилотируемого корабля 22 и выходом блока задания оси ориентирования перемещаемой аппаратуры 26.
Выход блока задания оси ориентирования перемещаемой аппаратуры 26 также соединен с третьим входом блока определения положения ориентира относительно оси ориентирования перемещаемой аппаратуры 23.
Выход блока определения положения ориентира относительно оси ориентирования перемещаемой аппаратуры 23 соединен со входом блока сравнения 29.
Другой вход и выход блока сравнения 29 соединены с соответственно выходом блока задания параметров требуемого положения ориентира относительно оси ориентирования перемещаемой аппаратуры 28 и входом блока формирования команд управления перемещаемой аппаратурой 30.
Выход блока формирования команд управления перемещаемой аппаратурой 30 через второй контроллер 14, приемо-передающие устройства 16, 15, установленные на пилотируемом корабле и перемещаемой аппаратуре, и первый контроллер 13 соединен с перемещаемой аппаратурой 2.
Выход блока определения положения ориентира относительно оси ориентирования перемещаемой аппаратуры 23 через второй контроллер 14, приемо-передающие устройства 16, 15, установленные на пилотируемом корабле и перемещаемой аппаратуре, и первый контроллер 13 соединен с блоком отображения положения ориентира относительно оси ориентирования перемещаемой аппаратуры 27.
Например, блок преобразования сигналов 11 может включать блок усиления сигналов 17, блок автоматической регулировки усиления 18 и многоканальный аналого-цифровой преобразователь 19, при этом входами блока преобразования сигналов 11 являются входы блока усиления сигналов 17, выходы которого соединены с входами блока автоматической регулировки усиления 18, выходы которого соединены с входами многоканального аналого-цифровой преобразователя 19, выход которого является выходом блока преобразования сигналов 11.
Например, блок определения текущего положения ориентира относительно ПК 3 может содержать блок определения положения центра масс ПК 32, блок определения ориентации ПК 34, блок запоминания координат текущего ориентира 36 и вычислитель 37, при этом выходы блока определения положения центра масс ПК 32, блока определения ориентации ПК 34 и блока запоминания координат текущего ориентира 36 соединены с разными входами вычислителя 37, а вход блока запоминания координат текущего ориентира 36 и выход вычислителя 37 являются соответственно входом и выходом блока определения текущего положения ориентира относительно ПК 3.
Например, блок выбора текущего ориентира 25 может содержать блок определения положения центра масс ПК 31, блок определения ориентации ПК 33 и блок определения координат текущего ориентира относительно планеты 35, при этом выходы блока определения положения центра масс ПК 31 и блока определения ориентации ПК 33 соединены с соответственно первым и вторым входами блока определения координат текущего ориентира относительно планеты 35, а первым и вторым выходами и с первого по четвертый входами блока выбора текущего ориентира 25 являются соответственно первый и второй выходы и с третьего по шестой входы блока определения координат текущего ориентира относительно планеты 35.
Блоки определения положения центра масс ПК 31, 32 и блоки определения ориентации ПК 33, 34 могут быть выполнены на основе средств навигационных измерений движения ПК.
В качестве ориентируемой перемещаемой аппаратуры может использоваться, например, оптический прибор, ось чувствительности которого требуется наводить на задаваемые на поверхности планеты цели, измерительный прибор, который необходимо заданным образом ориентировать относительно магнитного поля, или любой другой прибор, требующий специального ориентирования. При этом при ориентировании прибора относительно магнитного поля в качестве ориентира может рассматриваться направление силовых линий магнитного поля.
Ультразвуковые излучатели и приемники ультразвукового излучения размещаются на перемещаемой аппаратуре и на ПК таким образом и в таком количестве, при которых обеспечивается наличие прямой видимости между не менее, чем тремя ультразвуковыми излучателями, установленными на перемещаемой аппаратуре, и не менее, чем тремя приемниками ультразвукового излучения, установленными на ПК, при любом возможном положении перемещаемой аппаратуры в моменты ее ориентирования.
В случае наведения оси чувствительности (оси ориентирования) перемещаемой аппаратуры через иллюминатор ПК на ориентиры, заданные на поверхности планеты, приемники ультразвукового излучения могут быть установлены, например, по периметру используемого для наблюдения иллюминатора ПК.
Функционирование системы осуществляется следующим образом.
В начале каждого кадра измерения синхронизатор 21 вырабатывает синхронизирующий импульс запуска, поступающий на блок измерения времени задержки сигналов 20 и, одновременно, через второй контроллер 14, приемо-передающее устройство 16, установленное на ПК 1, приемопередающее устройство 15, установленное на перемещаемой аппаратуре 2, и первый контроллер 13 на блок формирования команд управления излучателями 12.
При получении вышеупомянутого сигнала блок формирования команд управления излучателями 12 последовательно формирует на своих выходах импульсы с фиксированной временной задержкой τ между ними. Данные импульсы поступают на ультразвуковые излучатели 4, 5, 6, которые поочередно вырабатывают импульсные ультразвуковые сигналы.
Излученные ультразвуковые сигналы принимают с помощью размещенных на ПК ультразвуковых приемников 8, 9, 10. Упомянутая временная задержка между импульсными ультразвуковыми сигналами τ определяется рабочей зоной расположения перемещаемой аппаратуры 2 относительно ПК, которая определяется максимально возможным расстоянием от аппаратуры до каждого из размещенных на ПК ультразвуковых приемников. При этом периодичность выработки синхронизатором 21 синхронизирующих импульсов запуска определяется данной временной задержкой τ и общим количеством ультразвуковых излучателей.
Принятые ультразвуковые сигналы через блок усиления сигналов 17 и блок автоматической регулировки усиления 18 поступают на многоканальный аналого-цифровой преобразователь 19, с выхода которого оцифрованные значения поступают на вход блока измерения времени задержки сигналов 20.
Блок измерения времени задержки сигналов 20 проводит анализ оцифрованных значений сигналов приемников 8, 9, 10, отделяет рабочие сигналы, полученные от излучателей 4, 5, 6, от помех и вычисляет временные задержки между импульсом запуска и принятыми рабочими сигналами. При этом, поскольку излученные импульсные ультразвуковые сигналы разнесены по времени, то в каждом из приемников принятые рабочие сигналы также разнесены по времени.
С выхода блока измерения времени задержки сигналов 20 измеренные времена задержки сигналов поступают в блок определения пространственного положения перемещаемой аппаратуры относительно ПК 22.
Сигнал от датчика температуры 7, установленного на перемещаемой аппаратуре 2, через первый контроллер 13, приемо-передающее устройство 15, установленное на перемещаемой аппаратуре 2, приемо-передающее устройство 16, установленное на ПК 1, и второй контроллер 14 также поступает в блок определения пространственного положения перемещаемой аппаратуры относительно ПК 22.
В блоке определения пространственного положения перемещаемой аппаратуры относительно ПК 22 по полученным временам задержки рассчитываются расстояния между ультразвуковыми излучателями 4, 5, 6 и ультразвуковыми приемниками 8, 9, 10, причем скорость звука вычисляется с учетом температуры, полученной с датчика температуры 7, и по полученным расстояниям рассчитываются параметры пространственного положения перемещаемой аппаратуры относительно ПК (линейные и угловые координаты перемещаемой аппаратуры в связанной с ПК системе координат), которые передаются в блок выбора текущего ориентира 25 и блок определения положения ориентира относительно оси ориентирования перемещаемой аппаратуры 23.
Из блока задания оси ориентирования перемещаемой аппаратуры 26 параметры оси ориентирования перемещаемой аппаратуры передаются в блок выбора текущего ориентира 25 и блок определения положения ориентира относительно оси ориентирования перемещаемой аппаратуры 23.
Из блока задания каталога ориентиров 24 параметры возможных ориентиров поступают в блок выбора текущего ориентира 25.
Из блока задания параметров требуемого положения ориентира относительно оси ориентирования перемещаемой аппаратуры 28 параметры, определяющие требуемое положение ориентира относительно оси ориентирования перемещаемой аппаратуры, передаются на один из входов блока сравнения 29.
В исходном состоянии системы на другой из входов блока сравнения 29 поступает сигнал нулевого уровня и блок сравнения 29 генерирует сигнал, соответствующий тому, что параметры, определяющие требуемое положение ориентира относительно оси ориентирования перемещаемой аппаратуры, отличаются от параметров, определяющих текущее положение ориентира относительно оси ориентирования перемещаемой аппаратуры. Данный сигнал от блока сравнения 29 поступает в блок формирования команд управления перемещаемой аппаратурой 30 и в блок выбора текущего ориентира 25.
В блоке выбора текущего ориентира 25 осуществляется выбор текущего ориентира из перечня возможных ориентиров, заданных каталогом ориентиров, и параметры, определяющие текущий ориентир, передаются в блок определения текущего положения ориентира относительно пилотируемого корабля 3 и блок задания каталога ориентиров 24.
По поступлению данных параметров в блок задания каталога ориентиров 24 в данном блоке осуществляется учет того, что данный ориентир отобран в качестве текущего ориентира.
В блоке определения текущего положения ориентира относительно ПК 3 определяется текущее положение ориентира относительно ПК, которое также передается в блок определения положения ориентира относительно оси ориентирования перемещаемой аппаратуры 23.
В блоке определения положения ориентира относительно оси ориентирования перемещаемой аппаратуры 23 рассчитываются параметры пространственного положения ориентира относительно оси ориентирования перемещаемой аппаратуры, которые передается в блок сравнения 29, а также через второй контроллер 14, приемо-передающие устройства 16, 15, установленные на пилотируемом корабле и перемещаемой аппаратуре, и первый контроллер 13 передаются в блок отображения положения ориентира относительно оси ориентирования перемещаемой аппаратуры 27.
Блок отображения положения ориентира относительно оси ориентирования перемещаемой аппаратуры 27 воспроизводит/отображает параметры пространственного положения ориентира относительно оси ориентирования перемещаемой аппаратуры посредством технических средств воспроизведения/отображения, например, в звуковом или визуальном формализованных форматах, приспособленных для восприятия экипажем ПК - звуковоспроизводящей аппаратурой, выводящей звук, например, на внешние динамики или наушники, или средством визуального отображения, выводящим изображение, например, на дисплей или очки.
Например, если в качестве перемещаемой аппаратуры используется съемочная аппаратура, предназначенная для выполнения визуально-инструментальных наблюдений наземных объектов через иллюминатор ПК, данный блок может быть выполнен в виде дисплея, на котором отображается положение оси ориентирования - оси визирования/чувствительности -перемещаемой аппаратуры относительно направления от перемещаемой аппаратуры на ориентир - наземный объект: например, графически отображается величина углового отклонения направления от перемещаемой аппаратуры на ориентир от оси ориентирования перемещаемой аппаратуры и величина азимутального угла, определяющего направление отсчета данного отклонения в плоскости, перпендикулярной оси ориентирования перемещаемой аппаратуры.
Оператор, находящийся на борту ПК, воспринимает данные, воспроизведенные посредством блока отображения положения ориентира относительно оси ориентирования перемещаемой аппаратуры 27, и в соответствии с ними перемещает, в том числе поворачивает перемещаемую аппаратуру 2, реализуя требуемую ориентацию перемещаемой аппаратуры 2 относительно ориентира.
В блоке сравнения 29 сравниваются поступающие в него параметры и при их совпадении (с необходимой точностью) сигал о том, что параметры, определяющие требуемое положение ориентира относительно оси ориентирования перемещаемой аппаратуры, совпадают с параметрами, определяющими текущее положение ориентира относительно оси ориентирования перемещаемой аппаратуры, поступает в блок формирования команд управления перемещаемой аппаратурой 30 и в блок выбора текущего ориентира 25.
По поступившему от блока сравнения 29 сигналу блок формирования команд управления перемещаемой аппаратурой 30 формирует необходимую командную информацию на работу перемещаемой аппаратуры 2, и эта командная информация через второй контроллер 14, приемо-передающие устройства 16, 15, установленные на пилотируемом корабле и перемещаемой аппаратуре, и первый контроллер 13 поступает на перемещаемую аппаратуру 2.
В соответствии с поступившей командной информацией осуществляется своевременная реализация необходимого автоматического управления перемещаемой аппаратурой без задействования оператора (космонавта) - например, реализация циклов включений/выключений аппаратуры и т.п.
По поступившему от блока сравнения 29 сигналу в блоке выбора текущего ориентира 25 осуществляется выбор нового текущего ориентира из возможных ориентиров, заданных каталогом ориентиров в его текущем состоянии, и параметры, определяющие новый текущий ориентир, передаются в блок определения текущего положения ориентира относительно пилотируемого корабля 3 и блок задания каталога ориентиров 24 и работа системы продолжается по вышеописанной процедуре.
Опишем технический эффект предлагаемого изобретения.
Предложенная система обеспечивают гарантированное целевое управление функционированием аппаратуры, свободно перемещаемой относительно пилотируемого корабля и ориентируемой по задаваемым ориентирам.
В том числе, предлагаемая система обеспечивает исключение/недопущение возможности ошибочного/несвоевременного функционального задействования аппаратуры, что в свою очередь исключает возможность потери уникальных целевых данных и/или регистрации аппаратурой данных, которые являются неликвидными. Также предлагаемая система позволяет устранить негативное влияние такого фактора как возможная технологическая несогласованность в функциональной работе перемещаемой аппаратуры и используемых бортовых систем корабля.
Особенную важность указанный положительный эффект проявляется при применении предлагаемой системы на КА в полете, когда, с одной стороны, отсутствует или существенно ограничена (как технически, так и организационно) оперативная возможность проверки качества зарегистрированных аппаратурой данных, а с другой стороны, регистрируемые данные обладают уникальностью и их потеря или несвоевременная регистрация могут нести невосполнимый ущерб (как научный, так и экономический).
Достижение технического результата обеспечивается введением в систему новых предложенных блоков, а также введением предложенных функциональных связей между блоками и предложенным исполнением уже известных блоков.
Промышленное исполнение существенных признаков, характеризующих изобретение, не является сложным и может быть выполнено по известным технологиям.
Система ориентирования перемещаемой на борту пилотируемого корабля аппаратуры, включающая блок определения текущего положения ориентира относительно пилотируемого корабля, не менее чем три ультразвуковых излучателя и датчик температуры, установленные на перемещаемой аппаратуре, не менее чем три ультразвуковых приемника, установленные на пилотируемом корабле, блок преобразования сигналов, блок формирования команд управления излучателями, контроллеры, два приемо-передающих устройства, установленные на соответственно перемещаемой аппаратуре и пилотируемом корабле, блок измерения времени задержки сигналов, синхронизатор, блок определения пространственного положения перемещаемой аппаратуры относительно пилотируемого корабля, блок определения положения ориентира относительно перемещаемой аппаратуры, при этом входы ультразвуковых излучателей соединены с выходами блока формирования команд управления излучателями, вход которого соединен с первым выходом первого контроллера, второй выход и первый и второй входы которого соединены соответственно с входом и выходом приемо-передающего устройства, установленного на перемещаемой аппаратуре, и выходом датчика температуры, причем выходы ультразвуковых приемников соединены с входами блока преобразования сигналов, выход которого соединен с первым входом блока измерения времени задержки сигналов, второй вход которого соединен с выходом синхронизатора, который также соединен с первым входом второго контроллера, второй вход и первый и второй выходы которого соединены соответственно с выходом и входом приемо-передающего устройства, установленного на пилотируемом корабле, и первым входом блока определения пространственного положения перемещаемой аппаратуры относительно пилотируемого корабля, второй вход и выход которого соединены соответственно с выходом блока измерения времени задержки сигналов и первым входом блока определения положения ориентира относительно перемещаемой аппаратуры, второй вход которого соединен с выходом блока определения текущего положения ориентира относительно пилотируемого корабля, отличающаяся тем, что введены блок задания каталога ориентиров, блок выбора текущего ориентира, блок задания оси ориентирования перемещаемой аппаратуры, установленный на перемещаемой аппаратуре блок отображения положения ориентира относительно оси ориентирования перемещаемой аппаратуры, блок задания параметров требуемого положения ориентира относительно оси ориентирования перемещаемой аппаратуры, блок сравнения, блок формирования команд управления перемещаемой аппаратурой, причем блок определения положения ориентира относительно перемещаемой аппаратуры выполнен в виде блока определения положения ориентира относительно оси ориентирования перемещаемой аппаратуры, при этом первый и второй выходы и с первого по четвертый входы блока выбора текущего ориентира соединены соответственно с входом блока определения текущего положения ориентира относительно пилотируемого корабля, входом и выходом блока задания каталога ориентиров, выходом блока сравнения, выходом блока определения пространственного положения перемещаемой аппаратуры относительно пилотируемого корабля и выходом блока задания оси ориентирования перемещаемой аппаратуры, который также соединен с третьим входом блока определения положения ориентира относительно оси ориентирования перемещаемой аппаратуры, выход которого соединен со входом блока сравнения, другой вход и выход которого соединены соответственно с выходом блока задания параметров требуемого положения ориентира относительно оси ориентирования перемещаемой аппаратуры и входом блока формирования команд управления перемещаемой аппаратурой, выход которого и выход блока определения положения ориентира относительно оси ориентирования перемещаемой аппаратуры через второй контроллер, приемо-передающие устройства, установленные на пилотируемом корабле и перемещаемой аппаратуре, и первый контроллер соединены соответственно с перемещаемой аппаратурой и блоком отображения положения ориентира относительно оси ориентирования перемещаемой аппаратуры.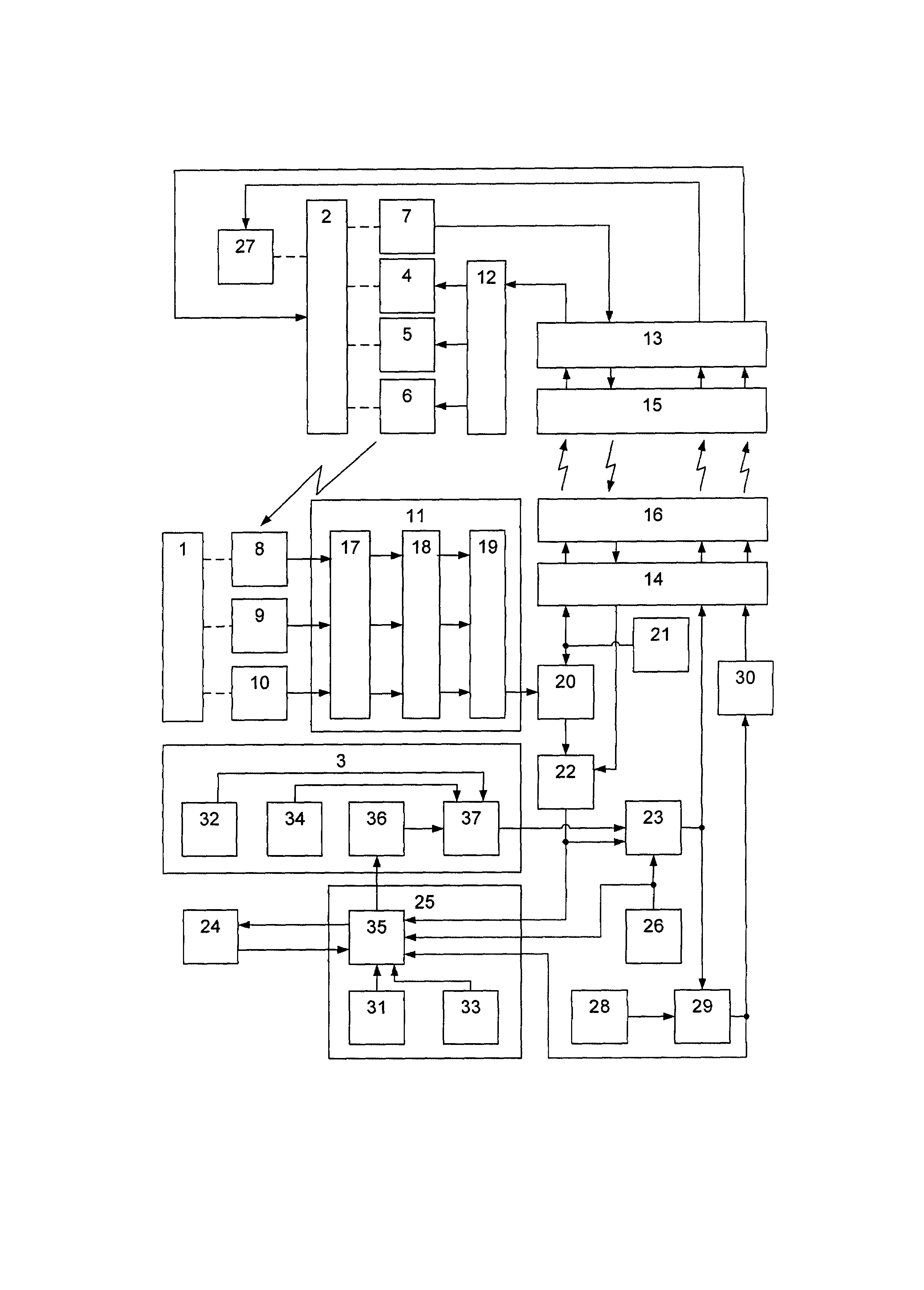
Способ мониторинга воздействия невесомости на двигательную активность находящегося на борту космического аппарата оператора
Способ определения воздействия невесомости на двигательную активность находящегося на борту космического аппарата оператора
Способ управления цифровой электромеханической следящей системой
Способ управления цифровой электромеханической следящей системой
Устройство и способ измерения плотности падающих тепловых потоков при тепловакуумных испытаниях космических аппаратов
Система управления вектором тяги жидкостного ракетного двигателя
Мобильное устройство визуализации контроля технологического процесса с применением технологии дополненной реальности
Способ контроля производительности установленной на космическом аппарате солнечной батареи с двусторонней светочувствительностью
Способ определения производительности установленной на космическом аппарате солнечной батареи с двусторонней светочувствительностью
Электронасосный агрегат
Способ определения деформации корпуса объекта преимущественно космического аппарата
Устройство для ориентирования перемещаемой на борту пилотируемого корабля аппаратуры наблюдения
Способ ориентирования перемещаемой на борту пилотируемого корабля аппаратуры
Способ определения деформации корпуса объекта преимущественно космического аппарата
Способ управления положением солнечных батарей космического аппарата и система для его осуществления
Устройство для выбора объекта наблюдения с орбитального космического аппарата
Способ ориентирования перемещаемой на борту пилотируемого корабля аппаратуры
Способ ориентирования перемещаемой на борту пилотируемого корабля аппаратуры
Система ориентирования перемещаемой на борту пилотируемого корабля аппаратуры
Способ ориентирования перемещаемой на борту пилотируемого корабля аппаратуры

