Результат интеллектуальной деятельности: КОМБИНИРОВАННАЯ ОПТИЧЕСКАЯ СИСТЕМА РАСПОЗНАВАНИЯ КОНТЕЙНЕРА И УРОВНЯ ЗАПОЛНЕНИЯ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к комбинированной оптической системе распознавания контейнера и уровня заполнения, содержащей по меньшей мере один выполненный с возможностью извлечения контейнер с внутренней полостью для приема текучих или сыпучих сред.
Уровень техники
В патентном документе WO 2011/015934 А1 раскрыт оптический датчик для регистрации уровня заполнения контейнера.
В патентном документе DE 3240047 А1 раскрыто устройство в стиральных или посудомоечных машинах с накопительными контейнерами.
В патентном документе FR 2653555 А1 раскрыто устройство для оптического измерения уровня заполнения контейнера.
В патентном документе DE 2726082 А1 раскрыто оптическое индикаторное устройство уровня жидкости.
В патентном документе FR 2057467 А5 раскрыто индикаторное устройство уровня жидкости.
Из патентного документа DE 102010038668 А1 известно стиральное устройство с оптическим датчиком уровня заполнения для жидкостного контейнера. Датчик уровня заполнения содержит световод, который частично может смачиваться подлежащей измерению жидкостью. В соответствии со степенью смачивания часть света из световода отбирается. Оставшаяся часть может быть зарегистрирована, и для определения уровня заполнения оценивают мутность жидкости или иной параметр.
Раскрытие сущности изобретения
В изобретении предложена комбинированная оптическая система распознавания контейнера и уровня заполнения, которая простым образом обеспечивает возможность измерения уровня заполнения и распознавания контейнера.
Это достигают посредством системы с признаками пункта 1 формулы. В соответствии с ним предложена комбинированная оптическая система распознавания контейнера и уровня заполнения, содержащая по меньшей мере один выполненный с возможностью извлечения контейнер с внутренней полостью для приема текучих или сыпучих сред, по меньшей мере один контейнероприемник для контейнера, причем контейнероприемник снабжен световым барьером отражения, при этом контейнер содержит тело погружения в виде световода, которое выступает в среду и оптически соединено со световым барьером отражения, если контейнер в контейнероприемнике находится в положении измерения. Посредством такой системы могут быть распознаны как уровень заполнения текучей или сыпучей среды, так и собственно контейнер. Указанная система обладает преимуществом, заключающимся в том, что сам контейнер не должен иметь каких-либо активных измерительных устройств, т.е. никакие электрические соединения от контейнероприемника к контейнеру не требуются. Таким образом, контейнер без затруднений может быть извлечен, чтобы его наполнить средой, опорожнить, или заменить на такого же типа контейнер, который, например, заполнен другой средой. Указанная система может преимущественным образом быть составной частью прибора или устройства, которым необходима среда в качестве рабочего материала, которые перерабатывают указанную среду, или в которых указанная среда осаждается в процессе работы. Посредством указанной системы возможно отслеживание уровня заполнения контейнера средой. Таким образом, система или устройство, в которое встроена указанная система, может распознавать, например, когда уровень среды упадет ниже минимального значения, т.е. достаточное количество среды для работы устройства отсутствует. Или в случае, если среда является продуктом устройства, система может распознавать, когда максимальный уровень преодолен, и контейнер должен быть опорожнен. Среди прочего посредством указанной системы может быть установлено, в наличии ли контейнер, и вставлен ли он в контейнероприемник правильным образом. Вследствие этого пользователь прибора или устройства может быть предупрежден, или работа устройства может быть прервана, если контейнер расположен в контейнероприемнике неверным образом, и существует опасность, что среда выйдет из устройства, или устройство будет повреждено без среды. Для оптического подсоединения тела погружения к световому барьеру отражения на одном конце предпочтительно предусмотрена плоскость ввода светового излучения, которая расположена на поверхности контейнера и в некотором заданном положении контейнера в контейнероприемнике расположена напротив плоскости выхода светового излучения светового барьера отражения. Плоскость ввода светового излучения расположена таким образом, что она мало препятствует проходу лучей света из светового барьера отражения в световод тела погружения и при необходимости обратно в световой барьер отражения. На другом конце тела погружения, зондовом конце, может быть выполнена плоскость смачивания, которая меняет свое отражающее действие, если она смочена средой. Если плоскость смачивания смочена средой, повышенная доля света поглощается средой и обратно не отражается (нарушенное полное отражение).
Согласно предпочтительному варианту осуществления изобретения на контейнер нанесен оптически распознаваемый код, в частности штрихкод. Таким образом, система в состоянии вводить информацию о контейнере. Эта информация может служить, например, для того, чтобы идентифицировать содержимое контейнера или сам контейнер. Так, системе может быть сообщено, какая среда находится в контейнере, или же в случае, если доступны различные контейнеры, которые могут быть заменены, система может определить, какой из контейнеров находится в контейнероприемнике. Посредством дополнительных путей коммуникации, например посредством беспроводной коммуникации с помощью мобильного устройства или посредством интернет-соединения, идентификатор контейнера может быть привязан к информации о его содержимом, так что вместе с информацией об идентификаторе контейнера также доступна информация о содержимом. Кроме того, код может содержать также информацию, касающуюся специальных параметров свойств содержимого, например для рабочих материалов: состав, физические параметры, указания дозировки и т.д. Код также может содержать привязку к адресу, по которому доступна указанная информация, так что система самостоятельно получает информацию, например, из интернета, например специальные рабочие программы для устройства или прибора.
Особенно предпочтительно, если на контейнере предусмотрены тела погружения различной длины. Это позволяет системе измерять несколько уровней заполнения. Для каждого дискретного подлежащего измерению уровня заполнения может быть предусмотрено тело погружения, зондовый конец которого при достижении уровня заполнения, соответствующего длине или высоте контейнера за вычетом длины тела погружения, смачивается средой и поэтому проявляет другое отражающее действие.
Согласно предпочтительному варианту осуществления может быть предусмотрено одно тело погружения, которое содержит, однако, несколько плоскостей смачивания, расположенных на различном расстоянии от одной или нескольких плоскостей ввода светового излучения, которые смочены при различном уровне заполнения контейнера средой. Таким образом, отражающее действие тела погружения изменяется по достижении различных уровней заполнения.
В следующем предпочтительном варианте осуществления тело погружения предусмотрено с плоскостью смачивания, которая непрерывно изменяет отражающее действие тела погружения в зависимости от степени смачивания, т.е. от доли смоченной поверхности. Таким образом, уровень заполнения можно регистрировать непрерывно в виде функции от интенсивности отраженного света световым барьером отражения.
Согласно следующему предпочтительному варианту осуществления изобретения контейнер имеет несколько отсеков, каждый из которых содержит внутреннюю полость и отдельные тела погружения. Таким образом, с контейнером могут быть предоставлены различные среды, уровень каждой из которых может быть измерен.
В предпочтительном варианте осуществления на контейнер для каждого отсека нанесен отдельный код. Таким образом, для каждого отсека отдельно может быть предоставлена информация, которая может быть считана системой, например информация о содержимом, т.е. среда в отсеке. При необходимости контейнер может быть наполнен пользователем различными средами. Информация о соответствующей среде может содержаться непосредственно в соответствующем коде, например в виде кодовой наклейки, которая предоставляется поставщиками среды и наносится пользователем на контейнер при заполнении отсека. Или каждому отсеку назначен предварительно заданный код, например в виде выштамповки на крышке контейнера, причем информация о среде назначается соответствующему коду отсека при заполнении отсека пользователем, который предоставляет таким образом указанную информацию. Для этого может служить возможность ввода данных на приборе, в который встроена система, или использование мобильного устройства, которое соединено с прибором. Информация может быть предоставлена производителем в машиночитаемой форме, например в виде напечатанного продуктового кода на упаковке. Продуктовый код может быть считан камерой мобильного устройства или сканером прибора и сопоставлен системой с идентификатором отсека. В качестве альтернативы продуктовый код на упаковке может представлять собой ссылку на интернет-страницу с информацией о продукте.
Кроме того, изобретение относится к бытовому прибору, в частности стиральной машине, сушильной машине или стирально-сушильной машине, содержащей вышеописанную комбинированную систему распознавания контейнера и уровня заполнения.
Краткое описание чертежей
Прочие преимущества и признаки изобретения раскрыты в нижеследующем описании со ссылками на приложенные чертежи. На чертежах показаны:
фиг. 1 схематический разрез комбинированной системы распознавания контейнера и уровня заполнения согласно первому варианту осуществления изобретения в первом состоянии,
фиг. 2 схематический разрез системы с фиг. 1 во втором состоянии,
фиг. 3 схематический разрез системы с фиг. 1 в третьем состоянии,
фиг. 4 схематический вид стиральной машины с комбинированной системой распознавания контейнера и уровня заполнения согласно изобретению,
фиг. 5 вид сверху на контейнер комбинированной системы распознавания контейнера и уровня заполнения согласно второму варианту осуществления изобретения,
фиг. 6 а) штрихкод контейнера с фиг. 5,
b) сигнал светового барьера отражения комбинированной системы распознавания контейнера и уровня заполнения согласно изобретению при считывании штрихкода с фиг. 6а),
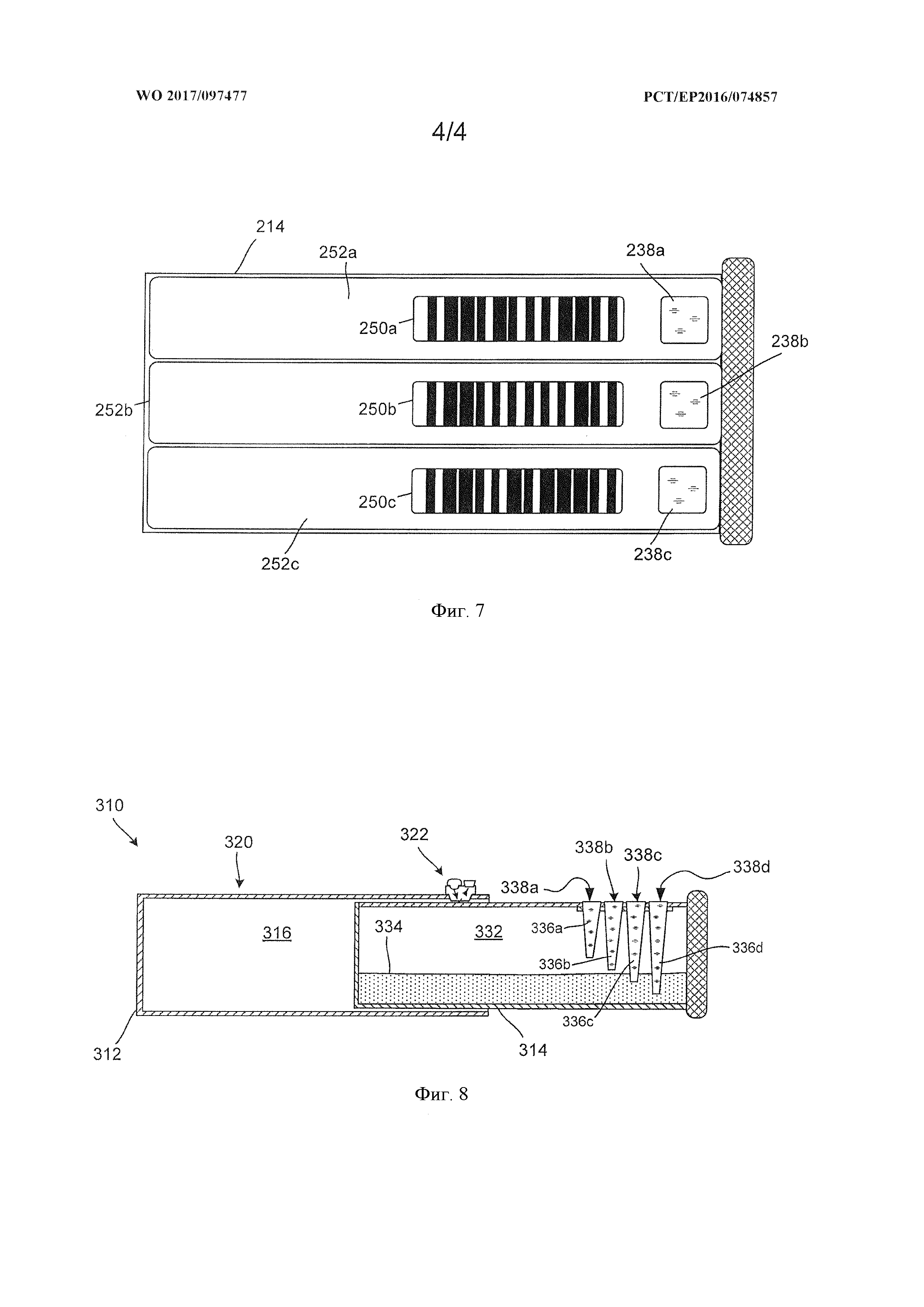
фиг. 7 вид сверху на контейнер комбинированной системы распознавания контейнера и уровня заполнения согласно третьему варианту осуществления изобретения, и
фиг. 8 схематический разрез комбинированной системы распознавания контейнера и уровня заполнения согласно четвертому варианту осуществления изобретения.
Осуществление изобретения
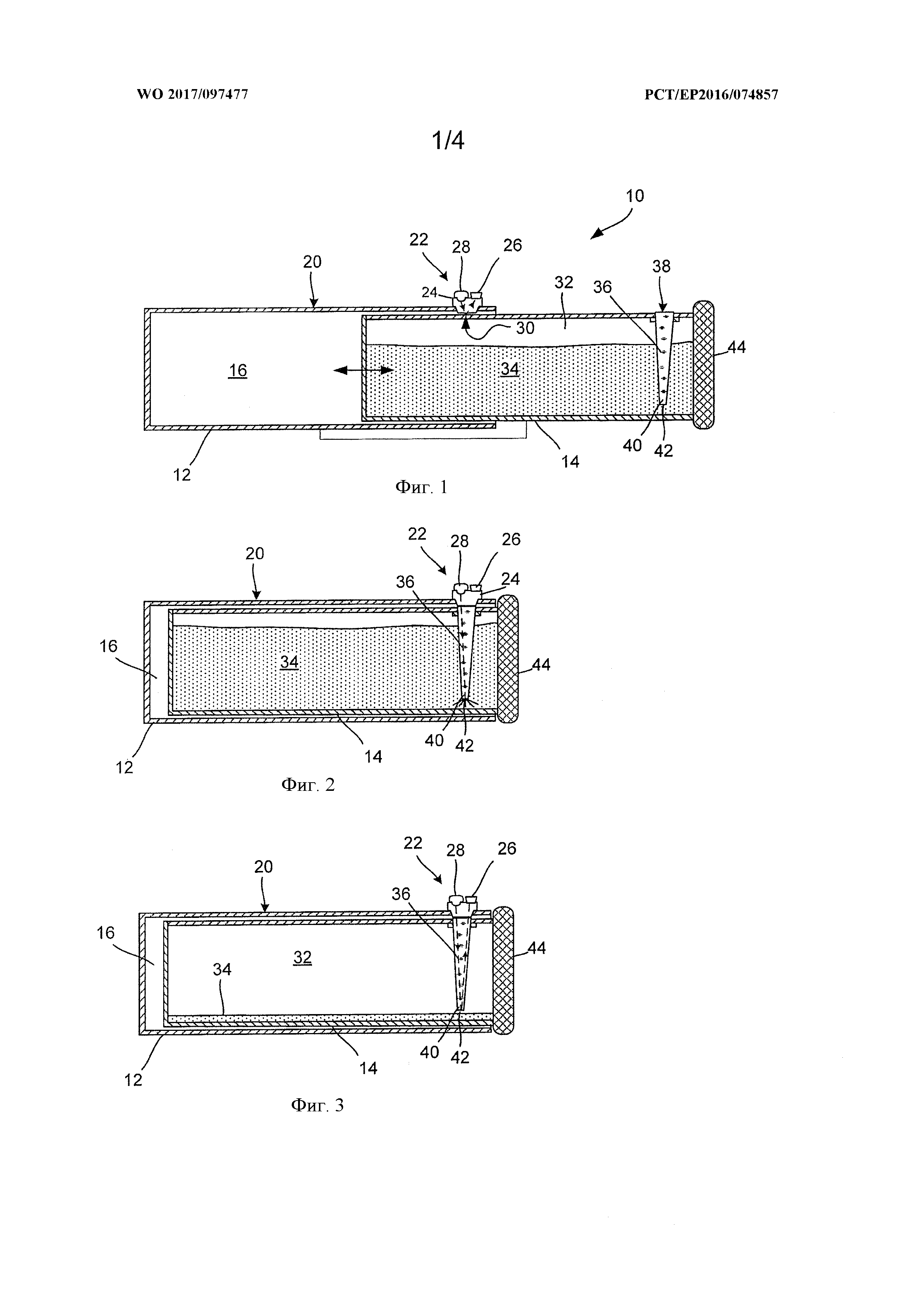
Схематически показанная на фиг. 1 на виде в разрезе система 10 распознавания контейнера и уровня заполнения содержит контейнероприемник 12 и контейнер 14. В контейнероприемнике 12 выполнена шахта 16 для приема контейнера 14. Шахта 16 имеет поперечное сечение, соответствующее контейнеру 14, так что контейнер 14 может быть вдвинут в шахту 16 или выдвинут из нее, как показано стрелками. На верхней стенке 20 контейнероприемника 12 предусмотрен световой барьер 22 отражения. Световой барьер 22 отражения в этом варианте осуществления имеет световодное тело 24, которое выступает через верхнюю стенку 20 в шахту 16. На световодном теле 24 установлены приемник 26 и передатчик 28, которые оптически подсоединены к световодному телу 24. Кроме того, световодное тело 24 снабжено плоскостью 30 выхода светового излучения, которая направлена в шахту 16.
Контейнер 14 выполнен в виде полого тела, образующего внутреннюю полость 32. Внутренняя полость 32 контейнера заполнена текучей или сыпучей средой 34. На верхней стороне контейнера 14 через стенку контейнера во внутреннюю полость 32 выступает тело 36 погружения. Тело 36 погружения в данном варианте осуществления выполнено в виде усеченной пирамиды из светопроводящего материала. Тело 36 погружения по направлению к верхней стороне контейнера снабжено плоскостью 38 ввода светового излучения. На противоположном зондовом конце 40, направленном ко дну контейнера 14 выполнена плоскость 42 смачивания. Тело 36 погружения выступает на такую глубину во внутреннюю полость 32, что плоскость 42 смачивания оказывается не погружена в среду 16, если среда 16 преодолела критический уровень заполнения.
Контейнер 14, как упомянуто выше, может быть вдвинут в шахту 16, причем контейнер 14, как показано на фиг. 2 и 3, может занимать конечное положение, в котором он полностью вдвинут в шахту 16. В этом конечном положении контейнер 14 расположен таким образом, что плоскость 30 выхода светового излучения светового барьера 22 отражения, по существу, перекрывается с плоскостью 38 ввода светового излучения тела 36 погружения.
Контейнер 14 может также быть полностью извлечен из контейнероприемника 12, чтобы его заполнить, опорожнить, почистить или заменить на контейнер такого же типа, например, заполненный другой средой 16. Для этого контейнер 14 может иметь отверстия наполнения и опорожнения, или стенка контейнера на верхней стороне может быть выполнена в виде откидной или съемной крышки.
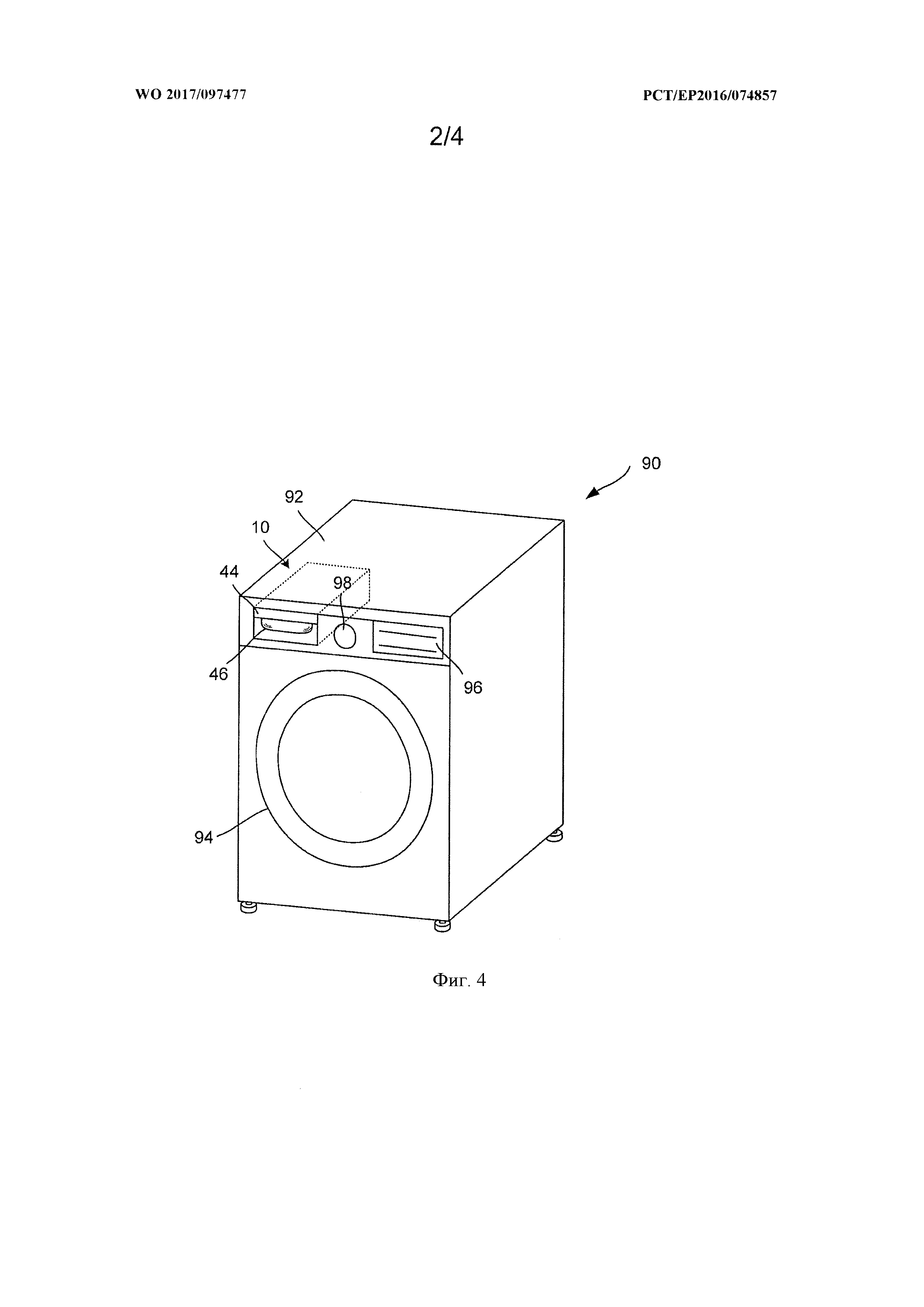
В описанном здесь варианте осуществления система 10 распознавания контейнера и уровня заполнения выполнена в виде компонента стиральной машины 90. Стиральная машина схематично изображена на фиг. 4, причем она содержит корпус 92, дверцу 94 и панель управления с индикаторами 96 и элементами 98 управления. Контейнер 14 образует при этом накопительный контейнер для автоматической дозирующей системы, которая в качестве среды содержит жидкое стиральное средство. Контейнер 14 расположен в шахте 18 контейнероприемника 12, который расположен в области панели стиральной машины 90. Автоматическая дозирующая система (не показана) может извлекать стиральное средство из контейнера 14 и дозированно подавать для стирки белья в область обработки. На торцевой стороне контейнера 14 размещена панель 44, на которой выполнена выемка 46 под хват.
Ниже раскрыто функционирование системы 10 распознавания контейнера и уровня заполнения.
На фиг. 2 показано, что контейнер 14 в его конечном положении является полностью вдвинутым в шахту 16 контейнероприемника 12. В этом конечном положении стиральная машина может функционировать положенным образом, т.е. дозирующая система при потребности может извлекать стиральное средство 16 из контейнера 16 посредством не показанного здесь устройства.
В конечном положении плоскость 30 выхода светового излучения светового барьера 22 отражения находится, по существу, напротив плоскости 38 ввода светового излучения тела 36 погружения, так что световодное тело 24 светового барьера 22 отражения оптически подсоединено к светопроводящей усеченной пирамиде тела 36 погружения.
Пока внутренняя полость 32 контейнера 14 достаточно заполнена стиральным средством, как например на фиг. 2, тело 36 погружения погружено своим зондовым концом 40 в среду 34, так что плоскость 42 смачивания смочена средой 34.
В этом положении свет, передаваемый передатчиком 28, направляется по световоду 24. Вследствие оптического соединения плоскости 30 выхода светового излучения с плоскостью 38 ввода светового излучения свет (схематично обозначенный на фиг. 2 штриховой линией) направляется в тело погружения. Поскольку зондовый конец 40 смочен средой 34, свет может выходить на плоскости 42 смачивания и рассеиваться в среде 34, т.е. не может отражаться обратно (нарушенное полное отражение).
Если уровень среды 34 в контейнере 14, как показано на фиг. 3, падает настолько низко, что зондовый конец 40 больше не достигает среды, и плоскость 42 смачивания более не является смоченной, то плоскость 42 смачивания световода является хорошо отражающей (предпочтительно полное отражение, а не отражение по типу ретрорефлектора), свет в значительной степени отражается и посредством оптического соединения направляется обратно в световой барьер 22 отражения. Это изменение распространения света может быть зарегистрировано в приемнике 26 и проанализировано управляющим устройством стиральной машины или дозирующим устройством. Таким образом, может быть определено, достаточен ли уровень заполнения контейнера 14 средой 34 для исправного функционирования. Конечное положение контейнера 14, таким образом, соответствует также положению измерения.
На фигуре 1 контейнер 14 вдвинут в шахту не полностью, т.е. он не находится в конечном положении, необходимом для исправной работы. В этом случае, а также если контейнер полностью извлечен из шахты, оптическое соединение тела 36 погружения и светового барьера 22 отражения, такое как на фиг. 2 и 3, отсутствует. Это означает, что отражающее действие в световом барьере 22 также изменено. Таким образом, это состояние также может быть зарегистрировано посредством светового барьера 22 отражения и проанализировано в управляющем устройстве стиральной машины, например для того, чтобы прервать ее работу. При этом распознавание этих состояний может осуществляться как статически - на основании отсутствующего соединения, так и динамически - посредством анализа перемещения верхней стороны контейнера 14 под световым барьером 22. Чтобы иметь возможность лучше различать отсутствие контейнера 14 от состояния частично вдвинутого контейнера, на верхней стороне контейнера может быть предпочтительно нанесен отражающий слой или маркировка, которая вызывает заданное отражающее действие светового барьера 22.
Система распознавания контейнера и уровня заполнения согласно следующему варианту осуществления ниже раскрыта со ссылками на фигуру 5, на которой для уже известных компонентов использованы те же номера ссылочных позиций, увеличенные на сто.
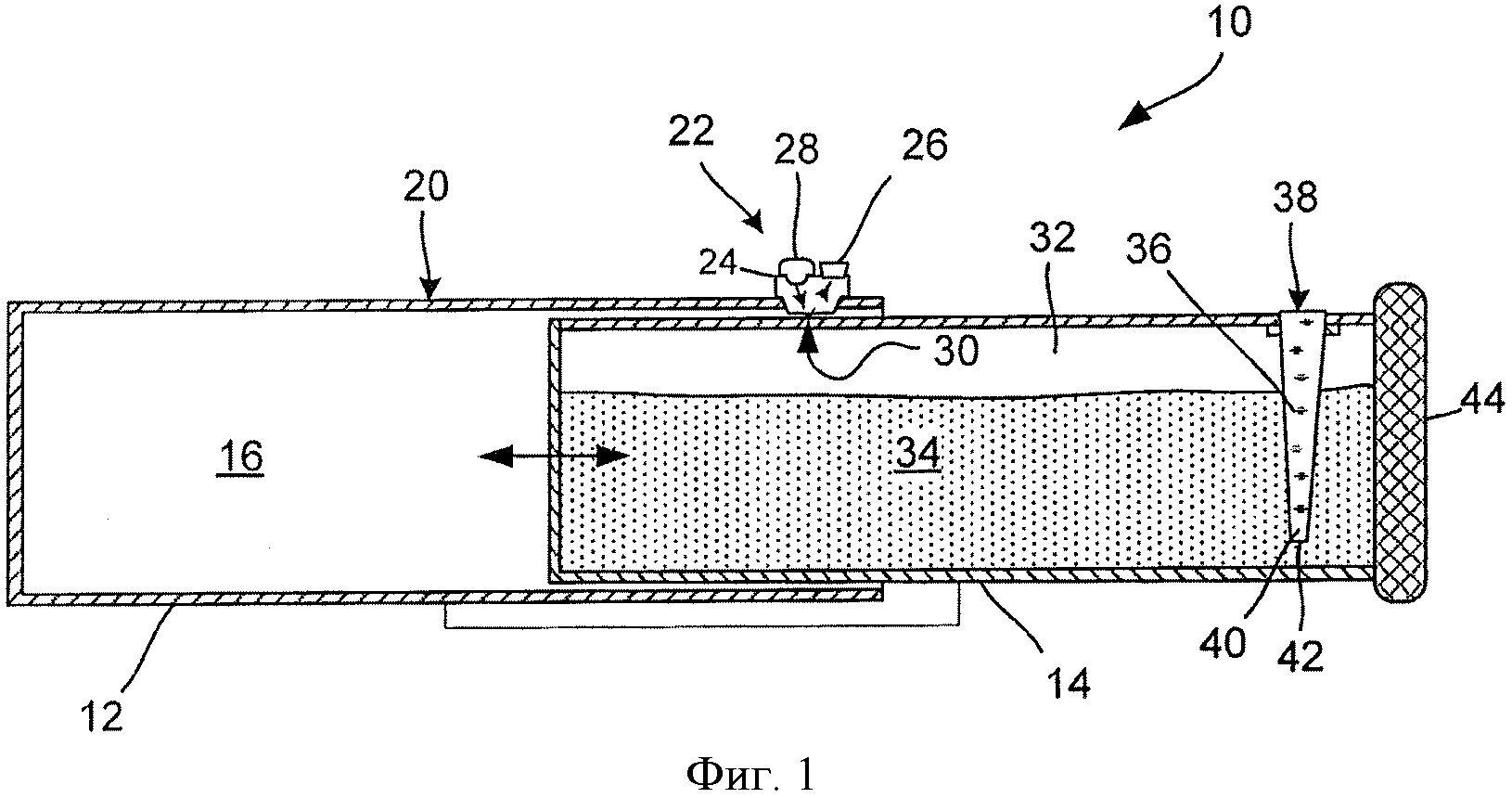
На фигуре 5 на виде на верхнюю сторону показан контейнер 114 системы распознавания контейнера и уровня заполнения. По сравнению с предыдущей раскрытой системой распознавания контейнера и уровня заполнения здесь контейнер 114 на верхней стороне снабжен штрихкодом 150.
Штрихкод 150 расположен таким образом, что штрихи кода лежат поперечно направлению вдвигания контейнера. Таким образом, штрихкод считывается при вдвигании или выдвигании контейнера 114 из шахты контейнероприемника 112 световым барьером 22 отражения. В штрихкоде 50 закодирована информация о находящейся в контейнере 114 среде. Управляющее устройство стиральной машины получает, таким образом, при вдвигании контейнера 114 информацию о стиральном средстве, которое теперь доступно в контейнере.
Особенно предпочтительно, штрихкод выполнен таким образом, что он может быть надежно считан, если контейнер вдвигают не с постоянной скоростью, например вручную.
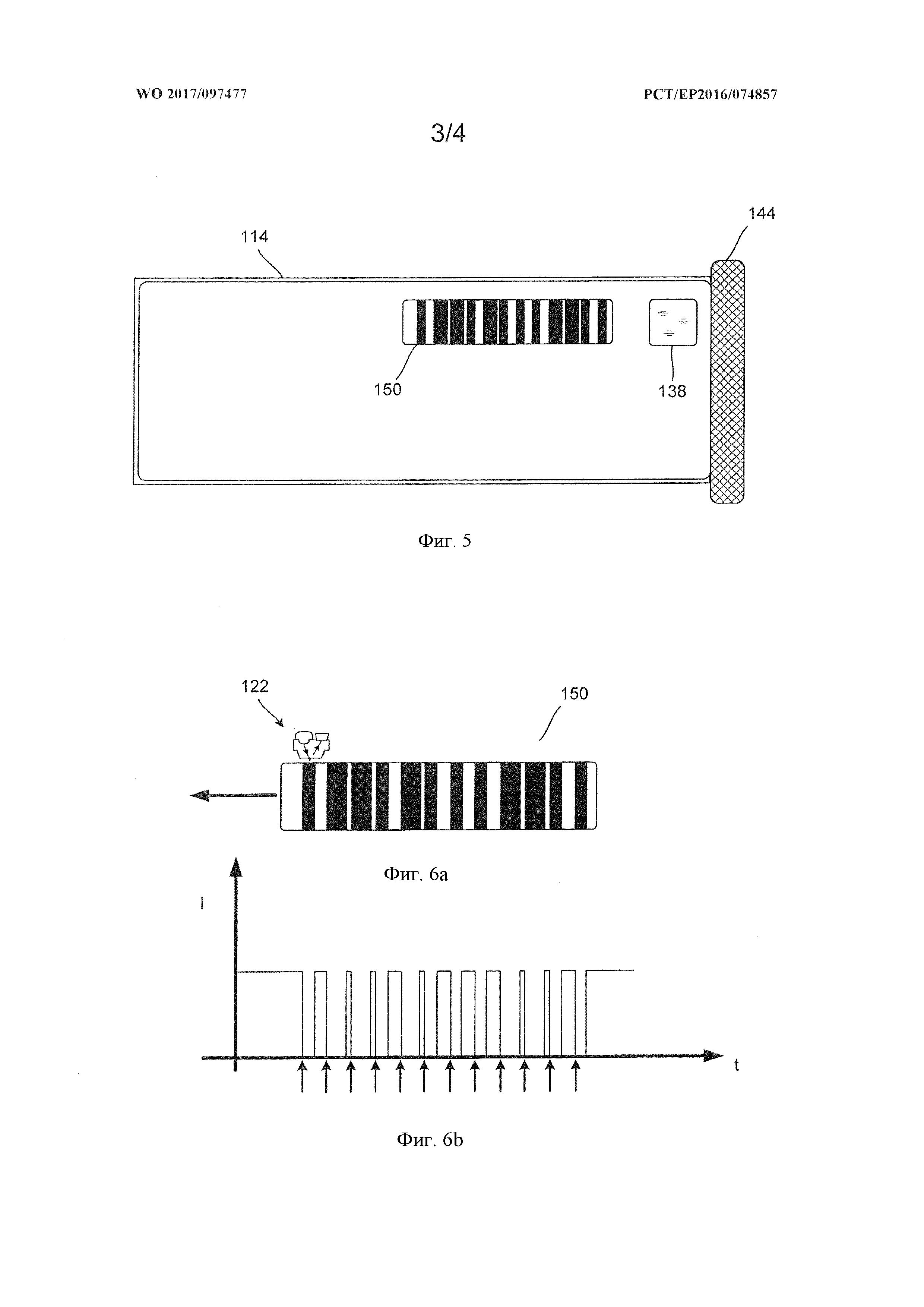
Для этого предусмотрен штрихкод, для примера изображенный на фиг. 6а, который снабжен эквидистантными светлыми/темными краями штрихов. На отображении соответствующего сигнала I светового барьера отражения во времени t на фигуре 6b эти края штрихов обозначены стрелками. Ожидаемый момент времени смены светлого/темного штриха может быть достаточно точно определен посредством интерполяции во времени примыкающих друг к другу смен светлого/темного штриха, даже если скорость при вдвигании меняется.
Предпочтительно, может быть предусмотрено устройство, которое обеспечивает в значительной степени постоянную скорость вдвигания контейнера. Например, это может быть демпфированная направляющая, или втягивающее устройство с приводом от двигателя.
Кроме того, могут быть предусмотрены иные меры для повышения надежности распознавания штрихкода. Например, информация может быть дополнительно скомпонована дублированным/резервированным образом с возможностью распознавания и исправления ошибок. Возможное во время считывания изменение направления движения может быть проверено на достоверность посредством расчета суммарного импульса и, в случае необходимости, откорректировано или использовано для запрашивания пользователя еще раз провести сканирование. Предпочтительно, также прочая дополнительная или альтернативная информация может быть считана световым барьером. Предпочтительно, может быть определено актуальное положение контейнера при вдвигании, например посредством кода длин на верхней стороне или посредством известного способа измерения пути, например для компьютерных мышей. С этой информацией данные светового барьера могут быть точнее проанализированы, т.е. сопоставлены с соответствующими событиями (считывание штрихкода на контейнере, положение световода для определения уровня заполнения, наличие контейнера в принципе или его полностью вдвинутого состояния, временное выдвижение или извлечение контейнера и т.д.).
В одном варианте штрихкод может прилагаться в виде наклейки производителем стирального средства. Пользователь стиральной машины может наклейку со штрихкодом - если он наполняет контейнер стиральным средством - нанести на верхнюю сторону контейнера на предусмотренное для этого место. Если у пользователя есть несколько контейнеров, то он может наполнять их разными стиральными средствами или прочими обрабатывающими средами, например кондиционером или средствами для ухода и отделки, и при необходимости вставить нужный контейнер в стиральную машину, причем она на основании штрихкода распознает, какая среда в данный момент доступна.
В качестве альтернативы штрихкод может быть жестко соотнесен с конкретным контейнером, например отштампован или напечатан. В этом случае пользователь предоставляет стиральной машине информацию о среде другим путем, например посредством элементов ввода стиральной машины или посредством мобильного устройства, например смартфона, который поддерживает связь со стиральной машиной. Особенно предпочтительно, на упаковке среды может быть предусмотрен продуктовый код, который может быть считан смартфоном, так чтобы эта информация о продукте была передана стиральной машине.
В стиральной машине предпочтительно сохранена привязка информации о продукте к коду контейнера, так что она доступна после каждой смены контейнера.
В качестве альтернативы может быть предусмотрено, что контейнер производителем уже заполнен средой и снабжен кодом, который содержит информацию о продукте. В предпочтительном варианте товарная упаковка среды может быть выполнена в виде сменного картриджа, который таким образом вставляют в контейнер, что, например, тело погружения протыкает защитную пленку.
В качестве альтернативы сам контейнер вместе с телом погружения может образовывать товарную упаковку для среды в одно- или многоразовой системе.
Система распознавания контейнера и уровня заполнения согласно следующему варианту осуществления раскрыта ниже со ссылкой на фиг. 7, на которой для уже известных компонентов использованы те же номера ссылочных позиций, увеличенные на двести.
На виде указанной фигуры видна верхняя сторона контейнера 214, который содержит три отсека 252а, 252b, 252с, каждый из которых может принимать среду. Таким образом, может быть предоставлен, например, один контейнер с несколькими различными средствами по уходу за бельем. В каждом из отсеков 252а, 252b, 252с предусмотрено тело 236а, 236b, 236с погружения, а на верхней стороне каждого из отсеков - штрихкод 250а, 250b, 250с. В соответствии с этим контейнероприемник оснащен тремя световыми барьерами отражения, так что при вдвигании контейнера все три штрихкода 250а, 250b, 250с, а в положении измерения конечного положения и уровни заполнения всех трех отсеков 252а, 252b, 252с могут быть распознаны одновременно. В одном из вариантов вместо одного контейнера с несколькими отсеками могут быть предусмотрены несколько контейнеров, которые могут быть размещены в контейнероприемнике одновременно.
Система распознавания контейнера и уровня заполнения согласно еще одному варианту осуществления раскрыта ниже со ссылками на фиг. 8, на которой для уже известных компонентов использованы те же номера ссылочных позиций, увеличенные на триста.
Система 310 распознавания контейнера и уровня заполнения в этом варианте осуществления содержит контейнер 314, который снабжен не одним, а несколькими, в данном случае четырьмя телами 336а, 336b, 336с, 336d погружения. Плоскости 338а, 338b, 338с, 338d ввода светового излучения тел погружения расположены в ряд на верхней стороне контейнера 314 друг за другом в направлении вдвигания, так что они один за другим в различных положениях измерения подсоединяются к плоскостям выхода светового барьера отражения. В зависимости от высоты уровня заполнения среды 334 свет светового барьера 332 отражения либо отражается от несмоченных тел 336а, 336b погружения, либо в случае погруженных тел 338с, 338d погружения рассеивается на зондовых концах 340с, 340d в среде 334.
Таким образом, при вдвигании контейнера 314 уровень заполнения может быть измерен ступенчато в соответствии с числом тел погружения.
Как показано на фиг. 8, тела погружения могут быть выполнены в виде цельных световодов. В качестве альтернативы тело погружения может быть выполнено в виде световодной гребенки, в которой плоскости смачивания, распознаваемые друг за другом световым барьером отражения, выполнены на различной высоте.
Предпочтительно, для различения плоскостей ввода светового излучения между положениями для различных высот уровня заполнения установлены реперные отметки, которые могут быть распознаны световым барьером отражения в качестве заданной смены светлого/темного штриха. В вышеописанном варианте осуществления указанные реперные отметки уже заданы расстояниями между отдельными плоскостями 338а, 338b, 338с, 338d ввода светового излучения отдельных тел 336а, 336b, 336с, 336d погружения.
Подлежащие определению уровни заполнения необязательно должны быть выполнены эквидистантными, а предпочтительно могут быть расположены по логарифмической шкале с большим разрешением при меньшем уровне заполнения.
Плоскости 338а, 338b, 338с, 338d ввода светового излучения предпочтительно расположены таким образом, что в конечном положении контейнера, т.е. после завершенного вдвигания в шахту 316, одна из плоскостей смачивания остается соединенной с световым барьером 322 отражения, для того чтобы в процессе работы обеспечить возможность непрерывного отслеживания одного заданного уровня заполнения, в частности минимально возможного уровня заполнения.
Уровень заполнения предпочтительно может определяться не ступенчато, а плавно, если тело погружения выполнено таким образом, что интенсивность отраженного света зависит от глубины погружения тела погружения в среду.
Варианты осуществления системы распознавания контейнера и уровня заполнения не ограничены вышеприведенными примерами вариантов осуществления. В альтернативном варианте осуществления световой барьер отражения может быть установлен не на расположенной сверху стенке контейнероприемника, а в другом месте, например на нижней стенке, так что он направлен к нижней стороне контейнера. Одно или несколько тел погружения, а также в случае необходимости один или несколько кодов в этом случае установлены на нижней стороне контейнера. Тогда зондовые концы при преодолении заданного уровня заполнения среды перестают смачиваться, так что в этом случае отражающее действие соответствующего тела погружения изменяется. В предпочтительном варианте осуществления поверхность смачивания на зондовом конце выполнена конической, так чтобы среда с плоскости смачивания быстро стекала или скапывала, если зондовый конец выходит из среды.
В следующем варианте осуществления бытовой прибор может представлять собой сушильную машину, в которой контейнер для конденсата выполнен в виде компонента системы распознавания контейнера и уровня заполнения.
В альтернативном варианте осуществления системы распознавания контейнера и уровня заполнения для оптического определения уровня заполнения и распознавания контейнера вместо светового барьера отражения может быть использована акустическая регистрирующая система, которая посредством ультразвука через отверстие может определять наличие контейнера и измерять уровень заполнения контейнера. Посредством такой ультразвуковой регистрирующей системы может быть считан также код на поверхности контейнера, который нанесен в виде некоторой структуры. В качестве альтернативы для целей раскрытой системы распознавания контейнера и уровня заполнения также подходит радарная система.
Способ управления холодильным аппаратом
Щипцы для завивки волос
Бытовой прибор
Электрический бытовой прибор
Способ и устройство для управления бытовым прибором и бытовой прибор
Газовый клапан с механизмом активации магнитного клапана
Способ определения и отображения степени гигиенической чистоты белья и/или прибора для обработки белья в приборе для обработки белья и прибор для обработки белья для осуществления данного способа
Бытовой прибор с защитной схемой
Холодильный аппарат с воздушным каналом
Водопотребляющий бытовой прибор с сифоном
Водопотребляющий бытовой прибор с сифоном
Способ и устройство для определения гигиенического состояния водопотребляющего бытового прибора и бытовой прибор с таким устройством
Бытовой прибор, содержащий генератор озона и фильтрующее устройство
Бытовой прибор с рельефным рисунком
Барабан для белья с профилем для оптимизации воздействия отжима
Соленоидный клапан с намагничиваемым поплавком
Водопотребляющий бытовой прибор с устройством генерации тумана
Водопотребляющий бытовой прибор с генератором газа для обработки и подводящим узлом
Барабан для белья со структурным рисунком и машина для обработки белья с таким барабаном
Дозирующее устройство для стиральной машины

