Результат интеллектуальной деятельности: СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ
Вид РИД
Изобретение
Область техники, к которой относится изобретение.
Данное изобретение относится к способам и соответствующим системам позиционирования подводных объектов, а именно к способам, при которых располагают устройства базисного позиционирования, местоположение которых заранее известно или вычисляемо, определяют при помощи датчиков, размещающихся на устройствах базисного позиционирования, глубины передатчиков, и их местоположение при помощи спутниковой навигационной системы, передают запросный сигнал подводного объекта при помощи передатчика подводного объекта, координаты которого нужно определить, передают ответные сигналы с устройств базисного позиционирования с помощью передатчиков устройств базисного позиционирования, принимают ответные сигналы с помощью расположенного на подводном объекте приемника сигналов, определяют координаты подводного объекта с помощью вычислительного модуля подводного объекта по задержке времени приема сигналов от устройств базисного позиционирования, местоположение которых известно.
В данном описании использованы следующие термины:
Устройства базисного позиционирования
- гидроакустический буй, или
- донные устройства, координаты которых вычисляют заранее, а потом они все или синхронизируются и хранят время или связаны электрически с верхом и на них приходит синхронизирующий сигнал от спутниковой системы или
- передатчики, располагаемые на судне/пантоне/плоту/пирсе и т .п.
(То есть вместо гидроакустических буев или донных станций, образующих длинную навигационную базу, может применяться короткая навигационная база, элементы которой располагаются на судне обеспечения или элементах инфраструктры (пирсы, причальные стенки, опоры мостов и т.п.)
Гидроакустический буй — свободно плавающий или установленный на якоре буй, предназначенный для излучения и/или приёма и ретрансляции по радиоканалу гидроакустических сигналов.
Запросный сигнал - может быть и гидроакустическим и электрическим, идущим по кабелю. То есть может запросный сигнал быть в виде гидроакустического сигнала или используется стробирующий электрический сигнал, передаваемый по кабелю. Это может быть, когда инициатором выступает надводная навигационная база, и запросный сигнал передается на подводную.
Уровень техники способа.
Существуют способы позиционирования подводных объектов, которые заключаются в определении координат подводных объектов. Для этого известны три типа систем определения координат подводных объектов в гидроакустике, отличающиеся друг от друга размерами измерительных баз, представляющие собой расстояния между гидроакустическими антеннами. Это системы УКБ (Ультра-короткобазисные, USBL, ultra-short baseline), КБ (короткобазисные, SBL, short baseline) и ДБ (длиннобазисные, LBL, long baseline). Наиболее близкими по своим характеристикам к заявленному решению являются длиннобазисные и короткобазисные системы, однако, в данном изобретении имеет место синтез короткобазисной системы (приемная часть, располагающаяся на подводном объекте) и длиннобазисной системы (передающая часть, основная навигационная база). Достоинством такого способа являются, во-первых, повышенная точность определения местоположения из-за дополнительных априорных данных о взаимном расположении приемников на подводном объекте, а во-вторых данные о углах азимута, крена и дифферента, что позволяет обеспечить не только определение местоположения подводного объекта, но и его ориентацию в трехмерном пространстве.
Из уровня техники известен способ позиционирования подводных объектов, при котором располагают устройства базисного позиционирования, местоположение которых заранее известно или вычисляемо, определяют при помощи датчиков, размещающихся на устройствах базисного позиционирования, глубины передатчиков, и их местоположение при помощи спутниковой навигационной системы, передают запросный сигнал подводного объекта при помощи передатчика подводного объекта, координаты которого нужно определить, передают ответные сигналы с устройств базисного позиционирования с помощью передатчиков устройств базисного позиционирования, принимают ответные сигналы с помощью расположенного на подводном объекте приемника сигналов, определяют координаты подводного объекта с помощью вычислительного модуля подводного объекта по задержке времени приема сигналов от устройств базисного позиционирования, местоположение которых известно.
См патент на изобретение № 2599902, опубликован в 2016 году.
Данный способ является наиболее близким по технической сути и достигаемому техническому результату и выбран за прототип предлагаемого изобретения как способа.
Недостатком этого прототипа является его невысокая точность навигации, то есть определения координат подводных объектов. Это связано с тем, что:
- происходит значительная потеря точности при работе вне базы (фигуры гидроакустических буев),
- требуется точная настройка базовых линий, поскольку координаты буев фиксируются приемником глобальной спутниковой навигационной системы и соответственно уменьшается погрешность определения координат из-за неточной установки гидроакустических буев.
- решение задачи определения пространственной ориентации возможно, но не будет учитывать фактическое взаимное расположение гидроакустических приемников, расположенных на подводном объекте, и для малых объектов (порядка 1-2 метров) не сможет обеспечить приемлемой точности.
Раскрытие изобретения как способа.
Опирающееся на это оригинальное наблюдение настоящее изобретение, главным образом, имеет целью предложить способ позиционирования подводных объектов, позволяющий, по меньшей мере, сгладить, как минимум, один из указанных выше недостатков, а именно повышение точности навигации подводных объектов с определением их пространственной ориентации, что и является поставленной задачей.
Для достижения этой цели способ навигации подводных объектов характеризуется по существу тем, что дополнительно способ включает в себя следующие этапы:
принимают ответные гидроакустические сигналы на подводном позиционируемом объекте как минимум тремя разными приемниками, располагающимися на подводном позиционируемом объекте так, чтобы их взаимное расположение было точно известно и сохранялось в процессе работы системы,
определяют при помощи датчиков, расположенных на каждом приемнике позиционируемого подводного объекта их глубины,
учитывая скорость звука в среде, определяют дистанции от каждого приемника позиционируемого объекта до каждого передатчика устройств базисного позиционирования,
за счет того, что взаимное расположение приемников сигнала на позиционируемом подводном объекте известно, решают задачи определения местоположения этих приемников с вычислением пространственного положения и ориентации подводного объекта.
Благодаря данным выгодным характеристикам появляется возможность повышения точности позиционирования путем вычисления координат по трем дистанциям от опорных точек устройств базисного позиционирования с известными координатами до трех разных приемников, располагающихся на подводном позиционируемом объекте. При этом также определяется пространственная ориентация подводного объекта.
Существует преимущественный вариант исполнения данной системы, при котором приемники располагают на позиционируемом подводном объекте максимально далеко друг от друга.
Благодаря данным выгодным характеристикам появляется возможность максимально повысить точность позиционирования, так как чем дальше датчики, расположенные на каждом приемнике позиционируемого подводного объекта, друга от друга, тем больше масштаб для последующих вычислений и соответственно точнее можно вычислить пространственную ориентацию позиционируемого подводного объекта.
Совокупность существенных признаков предлагаемого изобретения неизвестна из уровня техники для способов аналогичного назначения, что позволяет сделать вывод о соответствии критерию «новизна» для изобретения в отношении способа. Кроме того, данное решение неочевидно для специалиста в данной области,
Уровень техники системы.
Из того же уровня техники известна система включающая в себя устройства базисного позиционирования, имеющие приемник сигналов со спутников, соединенный с вычислительным модулем устройства базисного позиционирования, который соединен с передатчиком сигналов, содержащих данные о местоположении указанных устройств базисного позиционирования, система также включает в себя расположенный на позиционируемом подводном объекте приемник сигналов с указанных устройств базисного позиционирования, соединенный с вычислительным модулем позиционируемого подводного объекта, выполненным с возможностью определения координат подводного объекта по задержке времени приема сигналов от устройств базисного позиционирования, местоположение которых известно. См патент на изобретение № 2599902, опубликован в 2016 году.
Данная система является наиболее близкой по технической сути и достигаемому техническому результату и выбрана за прототип предлагаемого изобретения как системы.
Недостатком этого прототипа также является его невысокая точность навигации, то есть определения координат подводных объектов. Это связано с тем, что:
- происходит значительная потеря точности при работе вне базы (фигуры гидроакустических буев),
- требуется точная настройка базовых линий, поскольку координаты буев фиксируются приемником глобальной спутниковой навигационной системы и соответственно уменьшается погрешность определения координат из-за неточной установки гидроакустических буев.
- решение задачи определения пространственной ориентации возможно, но не будет учитывать фактическое взаимное расположение гидроакустических приемников, расположенных на подводном объекте, и для малых объектов (порядка 1-2 метров) не сможет обеспечить приемлемой точности.
Раскрытие изобретения как системы.
Опирающееся на это оригинальное наблюдение настоящее изобретение, главным образом, имеет целью предложить систему позиционирования подводных объектов, позволяющую, по меньшей мере, сгладить, как минимум, один из указанных выше недостатков, а именно повышение точности навигации подводных объектов с определением их пространственной ориентации, что и является поставленной задачей.
Для достижения этой цели система навигации подводных объектов характеризуется по существу тем, что дополнительно позиционируемый подводный объект включает в себя три различных приемника сигналов с устройств базисного позиционирования, соединенные с вычислительным модулем позиционируемого подводного объект.
Благодаря данным выгодным характеристикам появляется возможность повышения точности позиционирования путем вычисления координат по трем дистанциям от опорных точек устройств базисного позиционирования с известными координатами до трех разных приемников, располагающихся на подводном позиционируемом объекте. При этом также определяется пространственная ориентация подводного объекта.
Существует преимущественный вариант исполнения данной системы, при котором три различных приемника сигналов расположены максимально далеко друг от друга на позиционируемом подводном объекте.
Благодаря данным выгодным характеристикам появляется возможность максимально повысить точность позиционирования, так как чем дальше датчики, расположенные на каждом приемнике позиционируемого подводного объекта, друга от друга, тем больше масштаб для последующих вычислений и соответственно точнее можно вычислить пространственную ориентацию позиционируемого подводного объекта.
Совокупность существенных признаков предлагаемого изобретения неизвестна из уровня техники для способов аналогичного назначения, что позволяет сделать вывод о соответствии критерию «новизна» для изобретения в отношении способа. Кроме того, данное решение неочевидно для специалиста в данной области,
Краткое описание чертежей.
Другие отличительные признаки и преимущества данного изобретения ясно вытекают из описания, приведенного ниже для иллюстрации и не являющегося ограничительным, со ссылками на прилагаемые рисунки, на которых:
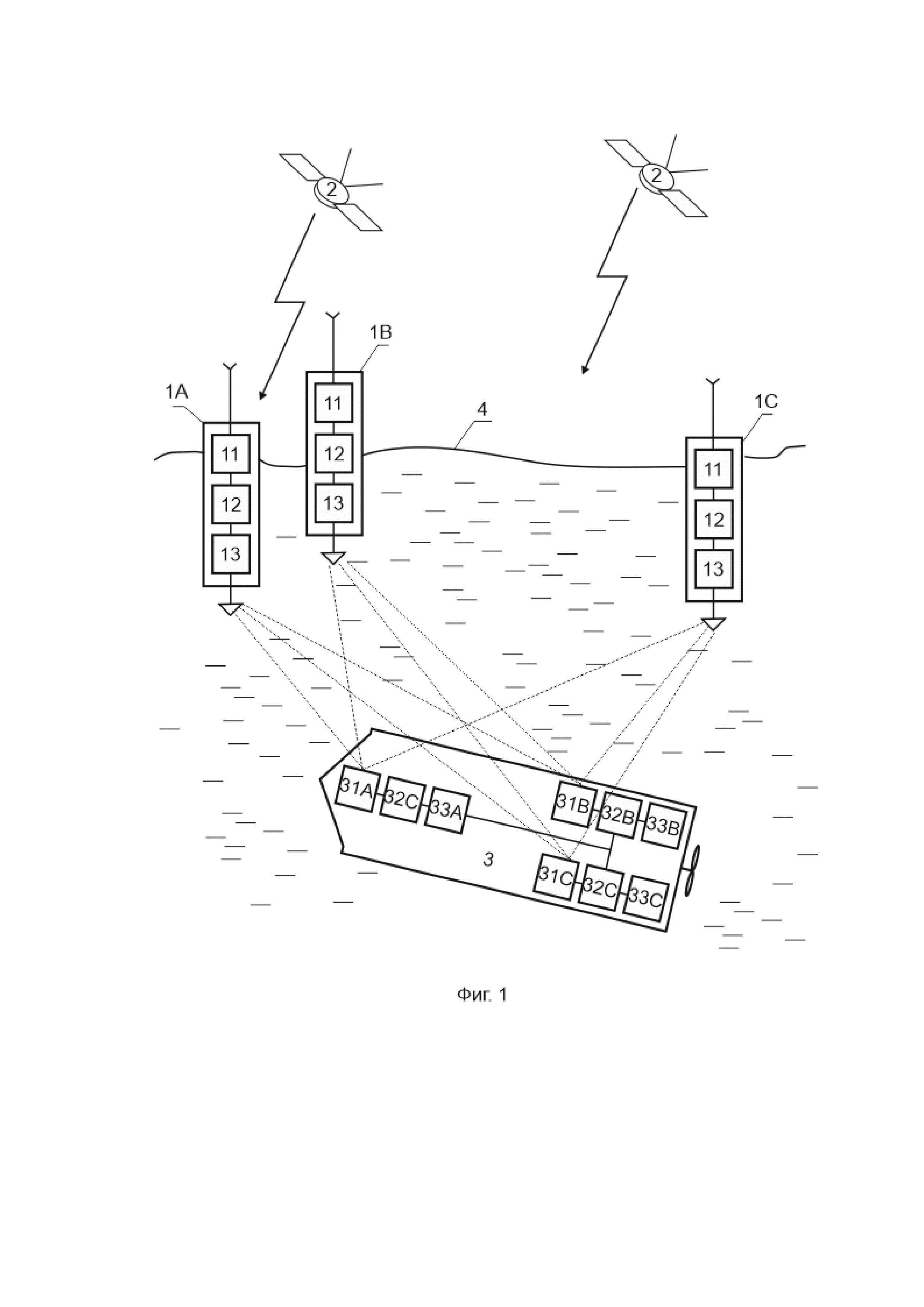
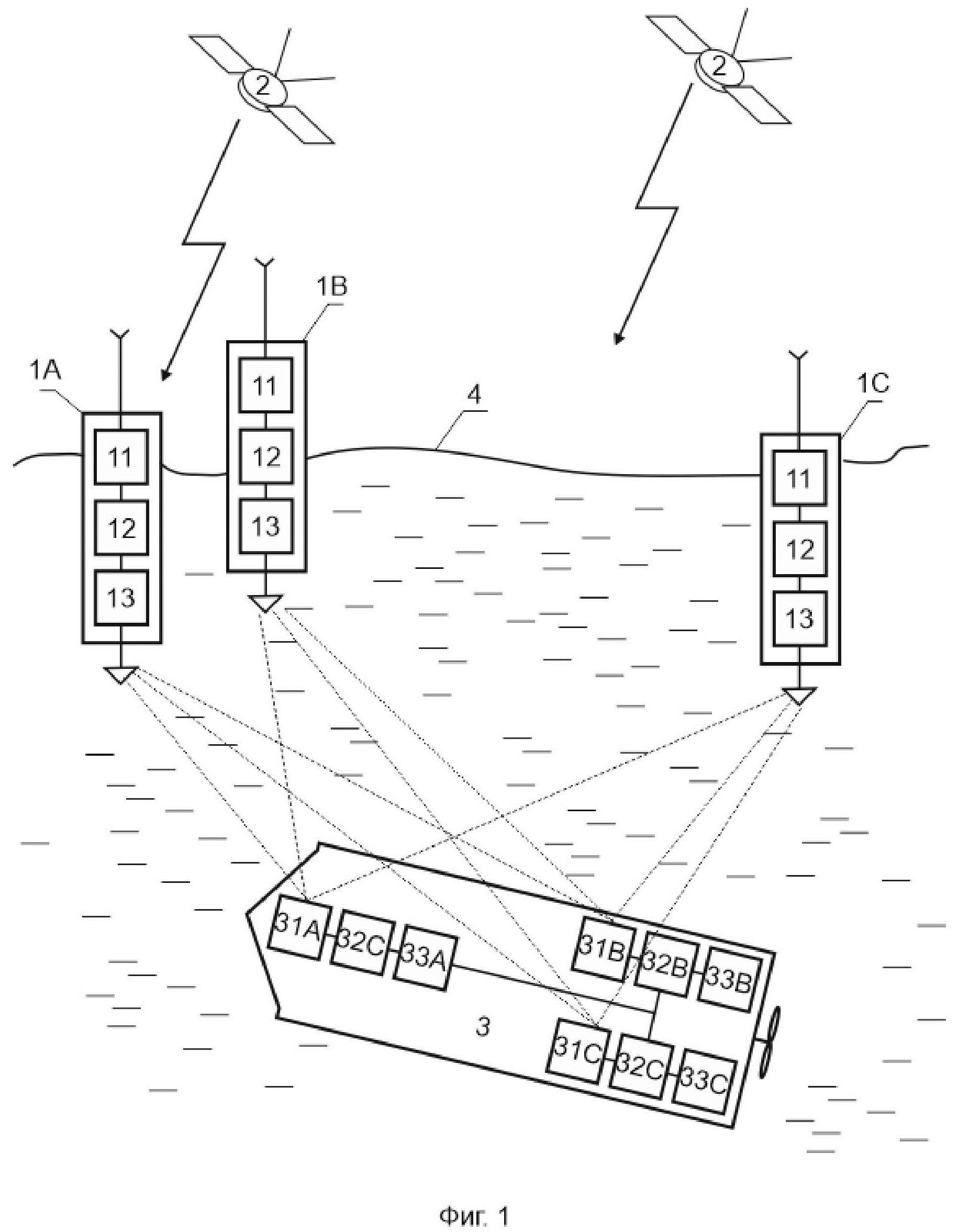
- фигура 1 изображает функциональную схему системы позиционирования подводных объектов, согласно изобретению,
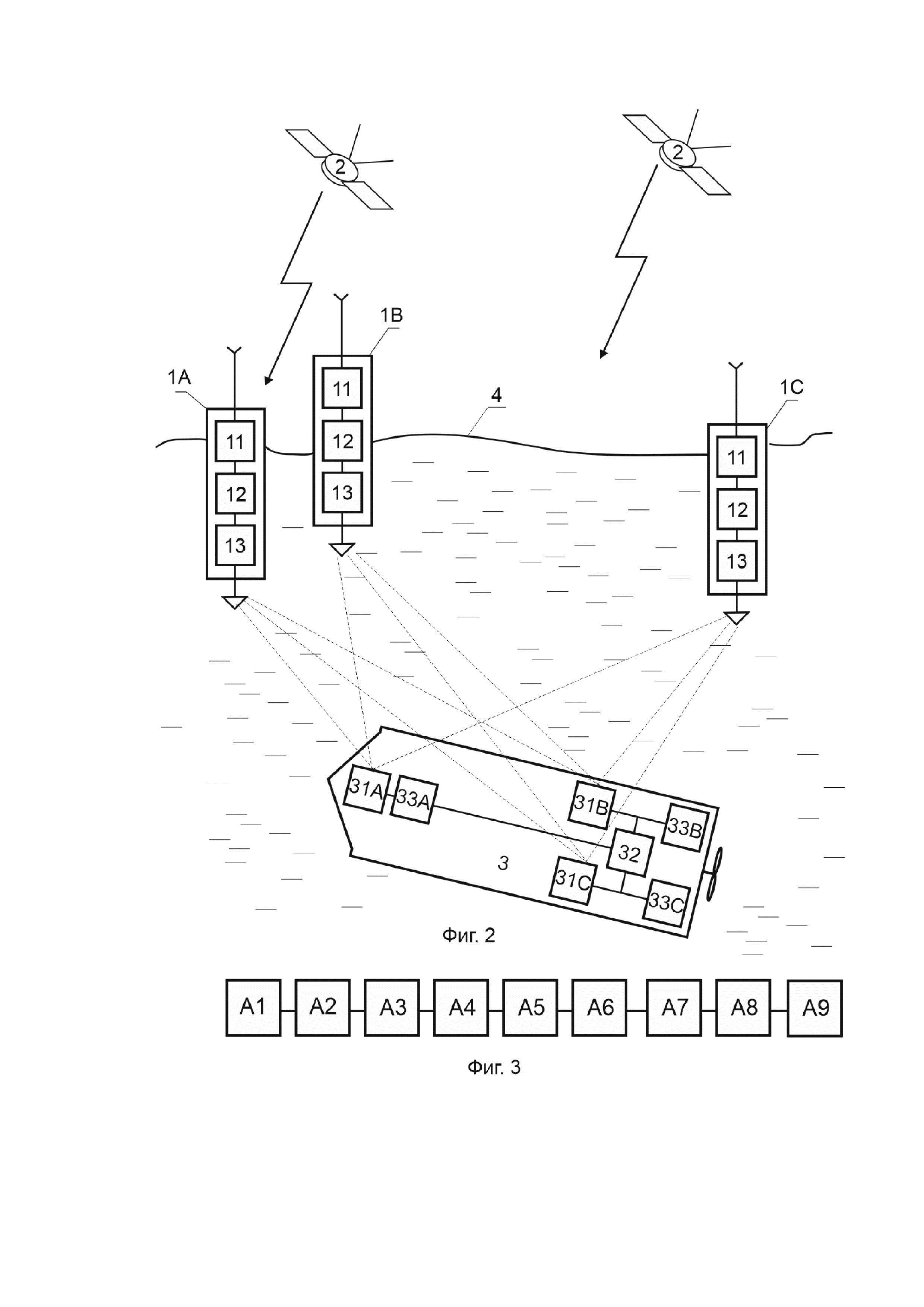
- фигура 2 изображает альтернативную функциональную схему системы позиционирования подводных объектов, согласно изобретению,
- фигура 3 схематично изображает этапы способа позиционирования подводных объектов, согласно изобретению.
Согласно фигурам 1 и 2 система позиционирования подводных объектов включает в себя устройства базисного позиционирования 1, имеющие приемник 11 сигналов со спутников 2, соединенный с вычислительным модулем 12 устройства базисного позиционирования, который соединен с передатчиком сигналов 13, содержащих данные о местоположении указанных устройств базисного позиционирования. Система также включает в себя расположенный на позиционируемом подводном объекте 3 приемник 31 сигналов с указанных устройств базисного позиционирования, соединенный с вычислительным модулем 32 позиционируемого подводного объекта, выполненным с возможностью определения координат подводного объекта по задержке времени приема сигналов от устройств базисного позиционирования, местоположение которых известно
На фигурах 1 и 2 устройства базисного позиционирования 1 изображены как гидроакустические буи, которые обозначены как 1А, 1В, 1С, имеющие приемник 11 сигналов со спутников 2, соединенный с вычислительным модулем 12 гидроакустического буя, который соединен с передатчиком 13 гидроакустических сигналов, содержащих данные о местоположении указанных гидроакустических буев и их идентификационные данные.
На фигурах 1 и 2 дополнительно позицией 4 обозначена граница жидкой и атмосферной сред, пунктирами – распространение сигналов от гидроакустических буев до приемника подводного объекта.
Позиционируемый подводный объект 3 включает в себя три различных приемника сигналов с устройств базисного позиционирования, соединенные с вычислительным модулем 32 позиционируемого подводного объекта, которые обозначены как 31А, 31В, 31С, каждый из которых имеет свой датчик глубины 33А, 33В, 33С.
На фигуре 1 изображен вариант, когда у каждого приёмника свой вычислительный модуль, а на фигуре 2 – вариант, когда он общий.
Осуществление изобретения.
Способ позиционирования подводных объектов работает следующим образом. Приведем наиболее исчерпывающий пример реализации изобретения. Имея в виду, что данный пример не ограничивает применения изобретения.
Согласно фигуре 3:
Этап А1. Предварительно располагают устройства базисного позиционирования, местоположение которых заранее известно или вычисляемо. Например, на поверхности воды устанавливают несколько, например, три гидроакустических навигационных буя 1А, 1В, 1С, имеющие каждый приемник 11 сигналов со спутников 2, соединенный с вычислительным модулем 12 гидроакустического буя, который соединен с передатчиком 13 гидроакустических сигналов, содержащих данные о местоположении указанных гидроакустических буев 1 и их идентификационные данные.
Этап А2. Принимают посредством расположенных на гидроакустических буях 1 приемников 11 сигналы со спутников 2.
Этап А3. Определяют при помощи датчиков, размещающихся на устройствах базисного позиционирования, глубины передатчиков, и их местоположение при помощи спутниковой навигационной системы. То есть определяют координаты гидроакустических буев 1А, 1В, 1С посредством вычислительных модулей 12 гидроакустических буев.
Этап А4. Передают запросный сигнал подводного объекта при помощи любого передатчика подводного объекта, координаты которого нужно определить.
Этап А5. Принимают ответные гидроакустические сигналы на подводном позиционируемом объекте как минимум тремя разными приемниками, 31А, 31В, 31С, располагающимися на подводном позиционируемом объекте так, чтобы их взаимное расположение было точно известно и сохранялось в процессе работы системы.
Этап А6. Определяют при помощи датчиков 33А, 33В, 33С, расположенных на каждом приемнике 31А, 31В, 31С позиционируемого подводного объекта их глубины.
Этап А7. Учитывая скорость звука в среде, определяют дистанции от каждого приемника 31А, 31В, 31С позиционируемого объекта до каждого передатчика устройств базисного позиционирования. Обозначены на фигурах 1 и2 пунктирами.
Этап А8. Приемниками второго 1В и третьего 1С гидроакустических буев принимают это зафиксированное время.
Этап А9. За счет того, что взаимное расположение приемников сигнала на позиционируемом подводном объекте известно, решают задачи определения местоположения этих приемников с вычислением пространственного положения и ориентации подводного объекта.
Последовательность этапов является примерной и позволяет переставлять, убавлять, добавлять или производить некоторые операции одновременно без потери возможности обеспечивать навигацию подводных объектов.
Промышленная применимость.
Предлагаемый способ позиционирования подводных объектов и система могут быть осуществлены специалистом на практике и при осуществлении обеспечивают реализацию заявленного назначения, что позволяет сделать вывод о соответствии критерию «промышленная применимость» для изобретения.
В соответствии с предложенным изобретением изготовлен опытный образец системы позиционирования подводных объектов. Он состоял из подводной части, представляющей собой квадратную раму, размерами 3х3 метра, в трех угла которой располагались приемные гидрофоны и датчики глубины, также на раме располагался нормобарический корпус, содержащий модуль цифровой обработки сигналов. Подводная (позиционируемая) часть сопрягалась информационно и электрически с надводной посредством кабеля длиной 100 метров с надводной частью.
Надводная часть представляла собой брызгозащитный кейс, в котором располагался модуль цифровой обработки сигналов, 4-х канальный усилитель мощности, к кейсу подключались четыре передающих антенны, располагающиеся на вертикальных штангах, закрепленных на малом судне.
Надводная часть дополнительно информационно сопрягалась с ПК, к которому подключалась бортовая навигационная система, обеспечивающая систему данными о географическом положении судна (соответственно и всех передатчиков) и азимутальном угле.
Экспериментальная проверка проводилась в сентябре 2018 года в проливе Невельского. Глубина места от 4 до 26 метров, температура воды 13 градусов, переменное течение до 5 узлов.
Испытания опытного образца системы позиционирования подводных объектов показали, что она обеспечивает возможность:
- точного определения координат подводного объекта, а именно: широта и долгота трех точек подводной части с повторяемостью лучше 0.5 метра;
- точного определения пространственной ориентации подводного объекта: углов азимута, крена и дифферента с повторяемостью порядка 1° для азимутального угла и 2° для углов крена и дифферента
Таким образом, в данном изобретении достигнута поставленная задача – повышение точности навигации подводных объектов с определением их пространственной ориентации. Что является очень важным, например, при дефектоскопии трубопроводов на мелководных участках, так как нельзя подогнать судно с динамическим позиционированием и роботом, и нужно дефектоскоп буксировать за катером, дефектоскоп (магнитометр) должен пройти на заданной высоте над трубой, и нужно: во-первых, знать в каждый момент времени, где он находится, чтобы подруливать, а во-вторых, нужно знать углы его наклона и направления для постобработки. Применить компас нельзя т.к. он всегда будет указывать вдоль трубы, поэтому единственный вариант – предложенная система и способ.
Способ навигации подводных объектов и система для его осуществления
Способ позиционирования подводных объектов
Способ и система беспроводной передачи энергии и информации
Способ борьбы с гармонической помехой при автокорреляционном методе приема информации с использованием шумоподобных сигналов
Способ передачи дискретной информации по гидроакустическому каналу связи в условиях многолучевого распространения сигнала
Способ навигации подводных объектов и система для его осуществления
Гидроакустическое устройство
Способ и система навигации подводных объектов
Способ позиционирования подводных объектов
Способ и система беспроводной передачи энергии и информации

