Результат интеллектуальной деятельности: СПОСОБ И СИСТЕМА НАВИГАЦИИ ПОДВОДНЫХ ОБЪЕКТОВ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
Группа изобретений относится к области подводной навигации и может быть использована для одновременного определения географического положения подводных мобильных объектов, дистанционно управляемых подводных аппаратов, водолазов, морских животных и т.д. в процессе движения.
УРОВЕНЬ ТЕХНИКИ
Из уровня техники известны три типа систем определения координат подводных объектов в гидроакустике, отличающиеся друг от друга размерами измерительных баз, представляющих собой расстояния между гидроакустическими антеннами. Это системы УКБ (Ультра-короткобазисные, USBL, ultra-short baseline), КБ (короткобазисные, SBL, short baseline) и ДБ (длиннобазисные, LBL, long baseline).
Наиболее близкими по своим характеристикам к заявленному решению являются ультра-короткобазисные системы, однако в данном изобретении предлагается усовершенствование ультра-короткобазисной системы, позволяющее обеспечивать координатами оба агента системы (и пеленгационную антенну и маяк-ответчик) практически одновременно.
Например, известны пеленгатор гидроакустической навигационной системы с ультракороткой базой (RU 2179730 С1) и способ определения направления на гидроакустический маяк-ответчик в условиях многолучевого распространения навигационного сигнала (RU 2515179 C1), в которых решается лишь задача определения направления на маяк-ответчик, но не решается задача об определении его географического местоположения и не решается задача о снабжении вычисленным местоположением системы, оборудованной маяком-ответчиком.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Технической задачей, на решение которой направлена группа изобретений, является создание такого решения для навигации подводных объектов, обеспечивающего более точное и надежное определение географического положения подводных объектов, а также обладающего повышенными параметрами энергетической эффективности и минимальным временем занятия полосы частот.
Техническим результатом является повышение эффективности работы системы навигации подводных объектов за счет повышения энергетической эффективности системы, а также снижения времени занятия полосы частот.
Для достижения данного технического результата разработан способ навигации подводных объектов, в котором принимают по меньшей мере один гидроакустический сигнал от по меньшей мере одного приемопередатчика, расположенного на по меньшей мере одном подводном объекте, при помощи фазированной антенной решетки, состоящей из гидроакустических приемников и расположенной на устройстве навигационного обеспечения, причем по меньшей мере один гидроакустический сигнал содержит данные о гидростатическом давлении и/или глубине;
определяют горизонтальный угол прихода по меньшей мере одного гидроакустического сигнала при помощи фазированной антенной решетки и наклонную дальность от фазированной антенной решетки до по меньшей мере одного приемопередатчика, расположенного на по меньшей мере одном подводном объекте, и местоположение по меньшей мере одного подводного объекта;
формируют по меньшей мере один сигнал, состоящий из синхронизирующей и информационной компоненты, причем по синхронизирующей компоненте определяют время прихода гидроакустического сигнала, а информационная компонента содержит по меньшей мере:
- информацию о горизонтальном угле прихода гидроакустического сигнала и наклонной дальности от фазированной антенной решетки до приемопередатчика или информацию о местоположении подводного объекта, определенного на основе горизонтального угла прихода гидроакустического сигнала и наклонной дальности от фазированной антенной решетки до по меньшей мере одного приемопередатчика;
- код (команду), определяющий по меньшей мере одно ответное действие принимающего сигнал подводного объекта;
передают сформированный по меньшей мере один сигнал на по меньшей мере один приемопередатчик, расположенный на по меньшей мере одном подводном объекте;
принимают сформированный по меньшей мере один сигнал на по меньшей мере одном приемопередатчике для определения местоположения подводного объекта и ответных действий на основе информации, содержащейся в информационной компоненте по меньшей мере одного сформированного сигнала.
Также разработана система навигации подводных объектов, содержащая:
по меньшей мере один приемопередатчик и датчик гидростатического давления, подключенные к блоку обработки данных и расположенные на по меньшей мере одном подводном объекте;
устройство навигационного обеспечения, содержащее соединенные между собой фазированную антенную решетку, состоящую из гидроакустических приемников, и вычислительный модуль, причем устройство навигационного обеспечения выполнено с возможностью
принимать по меньшей мере один гидроакустический сигнал от по меньшей мере одного приемопередатчика, расположенного на по меньшей мере одном подводном объекте, при помощи фазированной антенной решетки, состоящей из гидроакустических приемников, причем по меньшей мере один гидроакустический сигнал содержит данные о гидростатическом давлении;
определять горизонтальный угол прихода по меньшей мере одного гидроакустического сигнала при помощи фазированной антенной решетки и наклонную дальность от фазированной антенной решетки до по меньшей мере одного приемопередатчика, расположенного на по меньшей мере одном подводном объекте, и местоположение по меньшей мере одного подводного объекта;
формировать по меньшей мере один сигнал, состоящий из синхронизирующей и информационной компонент, причем по синхронизирующей компоненте определяют время прихода гидроакустического сигнала, а информационная компонента содержит по меньшей мере:
- информацию о горизонтальном угле прихода гидроакустического сигнала и наклонной дальности от фазированной антенной решетки приемопередатчика или информацию о местоположении подводного объекта, определенного на основе горизонтального угла прихода гидроакустического сигнала и наклонной дальности от фазированной антенной решетки до по меньшей мере одного приемопередатчика;
- код (команду), определяющий по меньшей мере одно ответное действие принимающего сигнал подводного объекта;
передавать сформированный по меньшей мере один сигнал на по меньшей мере один приемопередатчик, расположенный на по меньшей мере одном подводном объекте,
при этом упомянутый блок обработки данных выполнен с возможностью определения местоположения подводного объекта и ответных действий на основе информации, содержащейся в информационной компоненте по меньшей мере одного принятого сформированного сигнала.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для лучшего понимания сущности изобретения и чтобы более ясно показать каким образом оно может быть осуществлено, далее будет сделана ссылка, лишь в качестве примера, на прилагаемый чертеж, на котором:
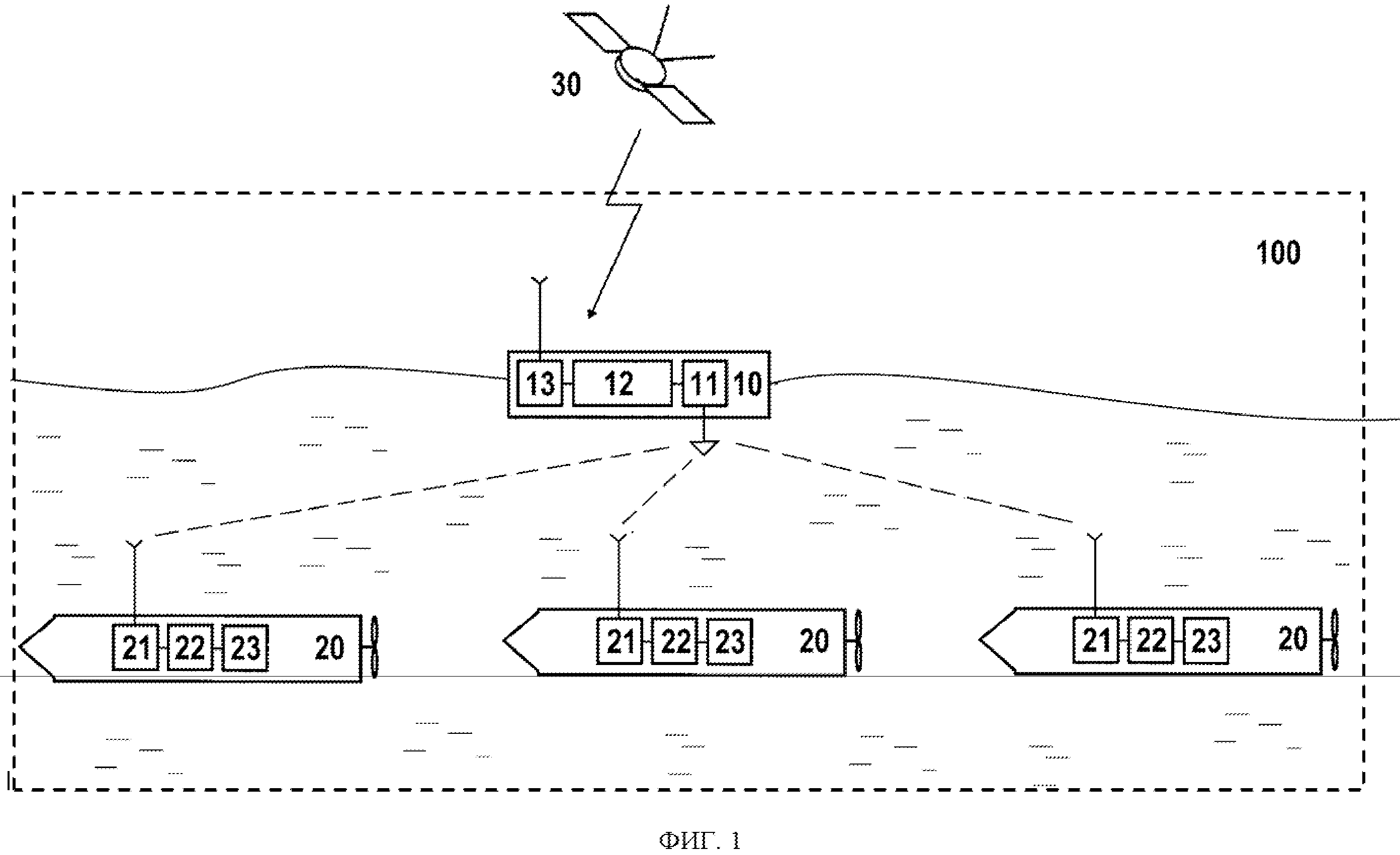
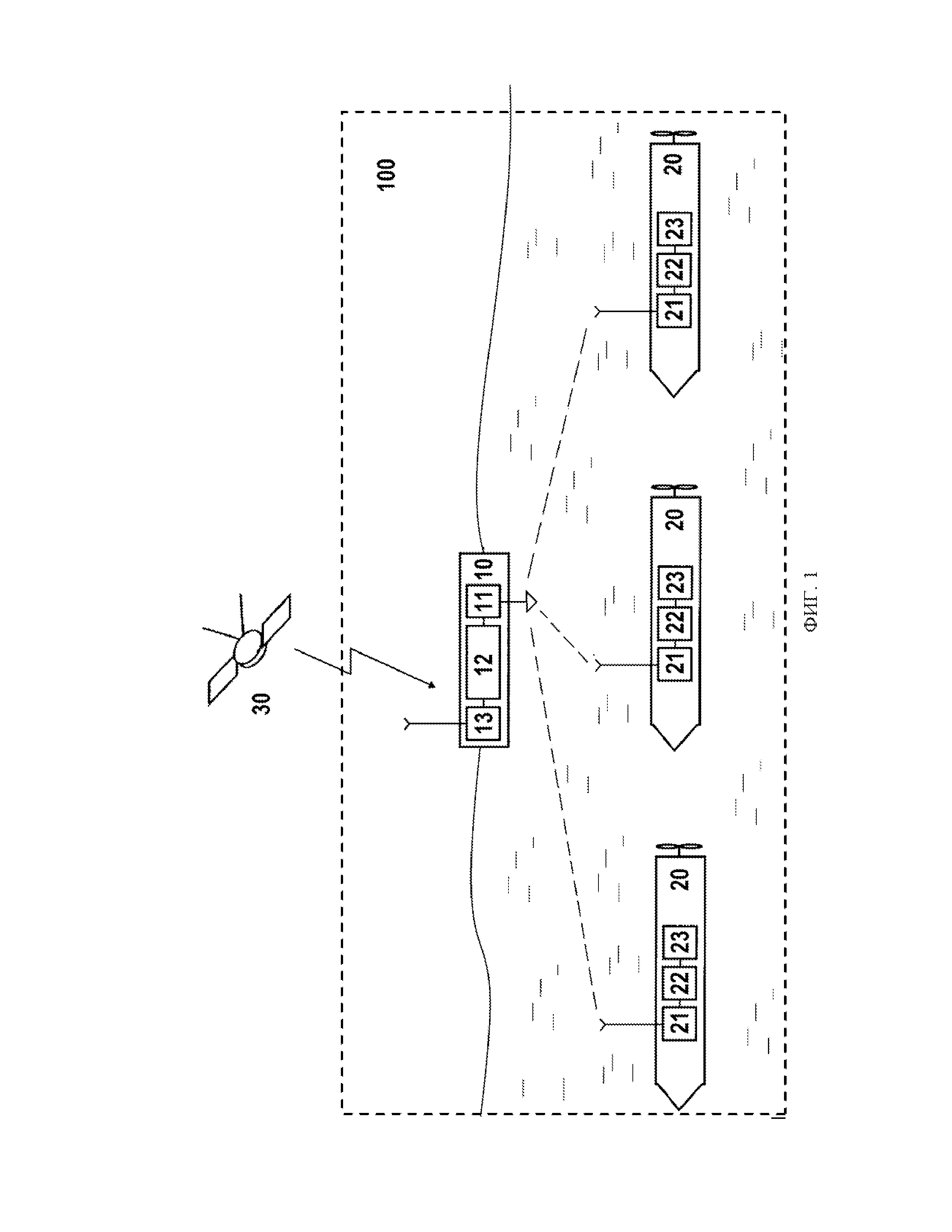
фиг. 1 - пример технической схемы системы навигации подводных объектов.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
В соответствии с приведенным на фиг. 1 примером технической схемы, система 100 навигации подводный объектов в частном случае содержит по меньшей мере один приемопередатчик 21 и датчик гидростатического давления 23, подключенные к блоку обработки данных 22, расположенные на по меньшей мере одном подводном объекте 20; и устройство навигационного обеспечения 10, содержащее соединенные между собой фазированную антенную решетку 11, состоящую из гидроакустических приемников, и вычислительный модуль 12.
В качестве подводных объектов 20 может выступать любой объект, находящийся в водной среде и месторасположение которого необходимо отслеживать, например различные управляемые подводные аппараты, водолазы, морские животные, различные подводные инструменты (геологические, биологические) для забора проб или анализа каких-либо параметров среды и т.д. Для обеспечения возможности отслеживания месторасположения подводных объектов их оснащают приемопередатчиками 21, обеспечивающими прием и передачу радио и/или гидроакустических сигналов. Блок обработки данных 22 может быть реализован на базе процессора или микропроцессора, в состав которого также может входить запоминающее устройство для хранения информации. Также подводный объект оснащают датчиком гидростатического давления 23, подключенного к блоку обработки данных 22, предназначенного для сбора данных о гидростатическом давлении и/или глубине.
Устройство навигационного обеспечения 10 может быть установлено на любом объекте на поверхности, например на судне обеспечения, пирсе, причале, плавучей платформе и т.п., причем фазированная антенная решетка 11 может быть погружена в водную среду посредством жесткой штанги, обеспечивающей фиксацию направления фазированной антенной решетки 11 относительно оси судна или гибкого кабеля. Вычислительный модуль 12 может быть реализован на базе процессора или микропроцессора, в состав которого также может входить запоминающее устройство для хранения информации, и модифицированные в программно-аппаратной части таким образом, чтобы обеспечить прием, обработку и формирование радио и/или гидроакустических сигналов. Дополнительно точка погружения фазированной антенной решетки 11 может быть оборудована соединенными с вычислительным модулем 12
магнитным компасом для определения в каждый момент времени азимутального угла направления фазированной антенной решетки 11 на магнитный север;
приемником 13 глобальной спутниковой навигационной системы (GPS/GLONASS и пр.), получающим навигационные данные от систем спутниковой навигации 30;
датчиком глубины, позволяющим определять расстояние фазированной антенной решетки 11 в погруженном положении до поверхности.
Таким образом, в любой момент времени устройство навигационного обеспечения 10 может определить ориентацию фазированной антенной решетки 11 на магнитный север, абсолютную географическую координату точки погружения и расстояние фазированной антенной решетки 11 от поверхности.
Посредством фазированной антенной решетки 11 устройство навигационного обеспечения 10 адресно посылает запросы на приемопередатчики 21. Указанные запросы передаются в виде акустических широкополосных сигналов, в которых кодируется код (команда), определяющий ответные действия принимающего сигналы подводного объекта 20. Ответными действиями могут быть, например, действия по генерированию ответного сигнала, принимаемого гидроакустическими приемниками фазированной антенной решетки 11, изменение параметров приемника (например, переключение кодового канала связи, изменение фиксированной задержки ответа и пр.), изменение режима работы приемника, экстренное всплытие и иные действия, причем ответный сигнал включает данные о гидростатическом давлении и/или глубине, определенные посредством датчика гидростатического давления 23.
Фазированная антенная решетка может быть оснащена внутренними часами для обеспечения возможности фиксации устройством навигационного обеспечения момента начала передачи запросного сигнала и момента приема ответного по меньшей мере одного гидроакустического сигнала от по меньшей мере одного приемопередатчика 21.
Соответственно, по принятому при помощи фазированной антенной решетки по меньшей мере одному гидроакустическому сигналу от по меньшей мере одного приемопередатчика 21 вычислительный модуль 12 определяет горизонтальный угол прихода гидроакустического сигнала.
Зная фиксированную задержку между приемом акустического широкополосного сигнала от фазированной антенной решетки 11 и передачей ответного сигнала приемопередатчика 21, которая заранее запрограммирована в приемопередатчике 21 и устройстве навигационного обеспечения 10, устройство навигационного обеспечения 10 посредством вычислительного модуля 12 может определить время распространения гидроакустического сигнала от по меньшей мере одного приемопередатчика 21, а зная скорость звука в водной среде, возможно определить наклонную дальность от фазированной антенной решетки до по меньшей мере одного приемопередатчика 21. Далее вычислительный модуль 12 определяет проекцию наклонной дальности на поверхность земли на основе данных о гидростатическом давлении и/или глубине, содержащихся в принятом гидроакустическом сигнале, и данных, полученных от датчика глубины, находящимися в точке погружения фазированной антенной решетки 11, и с учетом данных о горизонтальном угле прихода по меньшей мере одного гидроакустического сигнала и данных, полученных от магнитного компаса, глобальной спутниковой навигационной системы и датчика глубины, размещенного в точке погружения фазированной антенной решетки 11, вычислительный модуль 12 определяет местоположение по меньшей мере одного подводного объекта.
Для повышения эффективности работы системы навигации подводный объектов, в частности для повышения энергетической эффективности системы, а также снижения времени занятия полосы частот, в качестве навигационного сигнала для передачи данных о местоположении по меньшей мере одного подводного объекта используют сигнал, состоящий из синхронизирующей и информационной компонент, причем данный сигнал дополнительно содержит запросные данные, в частности код, определяющий ответные действия подводного объекта, принимающего сигнал.
Соответственно, в первом варианте реализации заявленного решения для передачи данных о местоположении по меньшей мере одного подводного объекта на подводный объект 20 вычислительный модуль 12 формирует по меньшей мере один сигнал, состоящий из синхронизирующей и информационной компонент, причем по синхронизирующей компоненте определяют время прихода гидроакустического сигнала, а информационная компонента содержит по меньшей мере информацию о местоположении подводного объекта, определенного на основе горизонтального угла прихода гидроакустического сигнала и наклонной дальности от фазированной антенной решетки до по меньшей мере одного приемопередатчика; и код (команду), определяющий по меньшей мере одно ответное действие подводного объекта, принимающего сформированный сигнал. Сформированный сигнал далее передается на приемопередатчик 21 и обрабатывается блоком обработки данных 22 для определения местоположения подводного объекта и ответных действий. Зная время прихода гидроакустического сигнала, ответное действие возможно выполнить через определенный промежуток времени после приема сформированного сигнала, если указанный промежуток времени задан в коде, определяющем ответные действия принимающего сигнал подводного объекта.
В альтернативном варианте реализации заявленного решения вместо информации о местоположении подводного объекта информационная компонента сформированного сигнала содержит информацию о горизонтальном угле прихода гидроакустического сигнала и наклонной дальности от фазированной антенной решетки до по меньшей мере одного приемопередатчика. Соответственно, определение месторасположения подводного объекта 20 на основе горизонтального угла прихода гидроакустического сигнала и наклонной дальности от фазированной антенной решетки до по меньшей мере одного приемопередатчика осуществляется блоком обработки данных 22 на подводном объекте 20. При этом в данном варианте реализации заявленного решения подводные объекты 20 дополнительно оборудуются магнитными компасами, а их часы синхронизируются с часами устройства навигационного обеспечения 10. Устройство навигационного обеспечения 10 и подводные объекты 20 могут излучать сигналы только в определенные моменты времени и время распространения сигнала, а соответственно и наклонная дальность, определяются и на устройстве навигационного обеспечения 10, и на подводных объектах 20 независимо.
Ответными действиями, которые выполняются на основе кода, содержащегося в принятом сформированном сигнале, могут быть, например, действия по генерированию гидроакустического сигнала через установленный промежуток времени, который в дальнейшем будет принят на фазированной антенной решетке 11, по переключению режимов работы устройства (например, переход в энергосберегающий режим на заранее заданное время), по передаче управляющих сигналов на размыкатель (если таковой устанавливается дополнительно) для экстренного всплытия и пр. Последующие сформированные устройством навигационного обеспечения 10 сигналы, состоящие из синхронизирующей и информационной компонент, передаются через равные и известные принимающему подводному объекту промежутки времени от момента приема от приемопередатчика 21 ответного гидроакустического сигнала, причем длительность этих промежутков может быть задана заранее или параметры длительности могут передаваться в коде, определяющем ответные действия принимающего сигнал подводного объекта. Сформированные сигналы также могут кодироваться в виде периодических сигналов, привязанных к часам GPS/GLONASS.
Таким образом, за счет того, что сигналы, которыми обмениваются устройство навигационного обеспечения 10 и подводные объекты 20, содержат минимальное количество информации, необходимой для определения месторасположения подводных объектов, требуется меньше времени для их передачи, вследствие чего сокращается расход энергии для передачи таких сигналов и снижается время занятия полосы частот. Кроме того, за счет того, что переданные на подводные объекты 20 сформированные сигналы помимо информации, необходимой для определения расположения, дополнительно содержат информацию запроса, представляющего собой код, определяющий ответные действия подводного объекта, нет необходимости направлять на подводные объекты дополнительные запросные сигналы, в связи с чем также сокращается расход энергии для передачи сигналов и снижается время занятия полосы частот, т.е. повышается эффективность работы системы навигации подводный объектов.
С целью дополнительного снижения времени занятия полосы частот, сигналы, состоящие из синхронизирующей и информационной компонент, могут быть сформированы с фиксированной длиной. При фиксированной длине сигнала возможно более эффективное планирование моментов излучения сигнала. Например, вычислительный модуль 12 может быть модифицирован в программно-аппаратной части таким образом, чтобы на основе информации о месторасположении двух подводных объектов, информации о времени распространения сигнала от фазированной антенной решетки 11 до приемопередатчиков данных объектов и времени распространения гидроакустического сигнала от приемопередатчиков до фазированной антенной решетки 11 с учетом фиксированной задержки между приемом акустического широкополосного сигнала от фазированной антенной решетки и передачей ответных сигналов приемопередатчиков, передавать с помощью фазированной антенной решетки 11 сформированные сигналы, состоящий из синхронизирующей и информационной компоненты, такой фиксированной длинны и через такой интервал времени, чтобы каждый из ответных гидроакустических сигналов от приемопередатчика 21 приходил в точку приема (на фазированную антенную решетку 11) в разное время без наложения их друг на друга, тем самым обеспечивая суммарное время двух транзакций "запрос-ответ" в большинстве случаев меньше, чем если бы запросы производились последовательно.
Также между устройством навигационного обеспечения 10 и подводными объектами 20 может быть реализовано двухуровневое кодовое разделение сигнала по синхронизирующей и информационной компонентам, причем обе компоненты формируются вычислительным модулем 12 с помощью различных псевдослучайных последовательностей (ПСП), а сигналы имеют одинаковую длину порождающих ПСП. Время прихода сигнала, как и ранее, определяется по синхронизирующей компоненте, а информационная компонента передаются в виде циклического сдвига информационной последовательности. В зависимости от длины применяемых ПСП существует возможность передать N бит информации, если длина последовательности 2N. Например, если сигнал получается при помощи двоичной фазовой манипуляции (BPSK - binary phase-shift keying) на несущей частоте 20 кГц с длиной. порождающей ПСП 210, то минимальная длина сообщения, в котором передается 10 бит информации (например, глубина ответчика), составит 0.1023 сек, при этом существует возможность передавать последовательно на сторону ответчика - приемопередатчика 21 (и на сторону станции) любые данные, разбитые блоками по 10 бит, если оба абонента знают порядок передаваемых данных и есть возможность пометить начало передаваемой последовательности, например посылки со значениями от 1000 до 1023 считаются управляющими, а посылки со значениями от 0 до 999 - данными.
С целью предотвращения несанкционированного использования подводных устройств в системе 100 навигации подводных объектов может быть реализовано кодовое разделение сигналов, причем первый запросный сигнал или сформированные сигналы, состоящие из синхронизирующей и информационной компонент, дополнительно могут содержать параметры кодового разделения для ответного гидроакустического сигнала и для последующего запросного сигнала, известного только запрашивающему подводному объекту.
Дополнительно с целью повышения помехозащищенности системы и повышения точности определения местоположения подводных объектов в сложных гидрологических условиях, например в звукоподводных каналах с сильной многолучевостью, в системе 100 навигации подводных объектов могут быть реализованы когерентный прием и сложение отраженных копий сигналов. Для этого в качестве приемников 21 используют rake-приемники, а вычислительный модуль 12 сконфигурирован в программно-аппаратной части таким образом, чтобы обеспечить соответствующие характеристики формируемого сигнала для обеспечения возможности реализации когерентного приема и сложения отраженных копий сигналов на приемнике 21.
Таким образом, предложенные способ и система навигации подводных объектов обеспечивают более точное и надежное определение географического положения подводных объектов, а также обладают повышенными параметрами энергетической эффективности и минимальным временем занятия полосы частот.
Гидроакустическое устройство
Способ борьбы с гармонической помехой при автокорреляционном методе приема информации с использованием шумоподобных сигналов
Способ передачи дискретной информации по гидроакустическому каналу связи в условиях многолучевого распространения сигнала
Способ навигации подводных объектов и система для его осуществления
Гидроакустическое устройство
Способ позиционирования подводных объектов
Способ позиционирования подводных объектов
Способ и система беспроводной передачи энергии и информации

