Результат интеллектуальной деятельности: Способ определения координат протечек бассейна выдержки АЭС с ярко выраженной акустической сигнатурой и робототехнический комплекс для его осуществления
Вид РИД
Изобретение
Изобретение относится к области измерительный и испытательный техники и направлено на возможность точного определения координат протечек в резервуарах, преимущественно в бассейнах выдержки АЭС, заполненных отработавшими свой ресурс объектами ядерной техники (ОЯТ).
Задача эксплуатации на АЭС приреакторных бассейнов выдержки, заполненных водой и отработавшими свой ресурс топливными сборками, в частности сборками твэлов, представляет собой определенную сложность, поскольку бассейны указанного назначения имеют бетонную наружную конструкцию с внутренней металлической облицовкой. Ряды БВ заполнены каналами с ОТВС, СУЗ и кластерными поглотителями. Доступ к металлической облицовке ограничен, имеются лишь свободные места в рядах, которые и могут быть использованы для диагностики облицовки. Эта задача не решена оптимально до настоящего времени.
Так известен способ диагностики, заключающийся в том, что в бассейн с водой вертикально погружают несущую конструкцию с основанием и сканирующими приборами через проходное отверстие, после чего улавливают звук, проходящий через течь воды, и по направлению максимальной громкости звука определяют местонахождение течи. (см. патент США №3838593 G01М З/24, опубликованный 1.10.1974г.).
Этот способ характеризуется недостаточной точностью определения места расположения течи без приближения устройства к течи в условиях многократных отражение звуковых волн от стен бассейна и корпусов изделий, и невозможностью приблизиться к источнику звука в бассейнах выдержки, в
которых погружение несущей конструкции возможно только через свободные места в рядах.
Известно и устройство обнаружения течи в бассейне, которое содержит сканирующие приборы, закрепленные на жёстком плоском основании, которое прикреплено к вертикальной несущей конструкции, вдоль которой выходят за пределы бассейна провода от приборов. Устройство может при необходимости поместиться между стоящими близко друг от друга корпусами твэлов. (см. патент РФ №2199735 G01N 29/04, опубликованный 22.05.2000г.). Недостатком данного устройства может считаться то, что определение места течи происходит по обнаружению увеличения интенсивности внутреннего течения в воде рядом с течью, но в этом случае основание должно быть параллельным сканируемой поверхности, а в таком положении оно не сможет быть расположено между специзделиями и облицовкой БВ
Также известны способ обнаружения течи в бассейне выдержки ОЯТ и устройство для его осуществления, которые предназначены по звуку вытекающей воды определить место её утечки из резервуара, (см. патент РФ №2392597 G01М З/24, опубликованный 20.06.2010г.).
Способ обнаружения течи в бассейне выдержки ОЯТ включает вертикальное погружение несущей конструкции с основанием и сканирующими приборами через проходное отверстие в бассейн с водой, улавливание звука, выходящий через течь воды, выбор направления по максимуму звука, определение по установленному направлению местонахождения течи. Затем после определения направления продвигают основание с приборами вниз вдоль несущей конструкции до её конца, выдвигают за его пределы и продвигают в направлении сигнала до достижения наибольшей близости к источнику сигнала. После этого подают под давлением на предполагаемое место красящее вещество, ждут его оседания, фиксируют видеоизображение видимой точки засасывания вещества в течи. Несущую конструкцию доставляют к проходному отверстию на подвижном транспортном устройстве с платформой.
Недостатком этого способа является сложность и трудоемкость в его реализации.
Устройство обнаружения течи в бассейне выдержки ОЯТ, реализующее способ, состоит из основания в виде плоских звеньев, соединенных друг с другом последовательно. На первом звене основания закреплены сканирующие приборы в виде гидрофона, сопла и средство визуализации, в частности фиброскоп, так как с ним основание будет иметь наименьшую толщину. Для предохранения гидрофона от возможных ударов при перемещении основания по дну бассейна смонтирован выступ. Указанное основание помещено внутри несущей конструкции устройства с возможностью передвижения упомянутых звеньев внутри самой конструкции. Эта возможность осуществляется с помощью смонтированных внутри этой конструкции ряда роликов и рельсом, а каждое звено основания снабжена колесом, которое при перемещении его катится по рельсу. Все звенья основания имеют монтажную полость и крюк. Крюк одного звена входит в полость соседнего звена, что сохраняет ориентацию в одной плоскости, кроме того все верхние части звеньев соединены планками между собой с возможностью их перемещения в вертикальной плоскости. Внутри всех звеньев основания выполнена ещё одна полость для укладки проводов от сканирующих приборов. Для монтирования и ориентирования несущей конструкции под водой она закреплена на подвижной платформе, которая имеет тележку, которая перемещается по горизонтальной направляющей над бассейном с водой. На тележке и платформе смонтирован фланец, к которому прикрепляют несущую конструкцию, и которая состоит из отдельных труб, скрепленных торцами между собой болтовым соединением, при этом каждая труба опускается под воду, а её торец крепится на фланце и соединяется с торцем следующей трубы, также опускаемой под воду и максимального достижения направляющей насадки дна бассейна, предназначенной для направления основания, выходящего из несущей конструкции. Она преобразует вертикальное направление движения основания в горизонтальное движение после достижения им нижнего конца несущей конструкции, при этом упругие планки изгибаются в поперечном направлении и помогают основанию сменить направление движения, оставаясь в вертикальном положении.
Рассмотренное устройство для обнаружения течи в бассейне выдержки ОЯТ сложно конструктивно и трудоемко при его сборке под водой. Это устройство имеет принципиально иное конструктивное исполнение в отличие от заявляемого в качестве изобретения технического решения и является аналогом только по функциональному назначению.
Наиболее близким аналогом конструктивно является робототехнический комплекс для работ в бассейне выдержки атомной электростанции, но он имеет принципиально иное назначение, а именно исследование с помощью средств визуализации, в частности видеокамеры, дна бассейна выдержки с водой, обнаружение находящихся там упавших предметов и их подъем из водного пространства на поверхность, (см. патент на полезную модель РФ №125509 B25J 5/00, опубликованный 10.03.2013г., обладателем которого является ООО «Инженерное Бюро ВАСО»).
Общее конструктивное сходство заявляемого с известным робототехническим комплексом для работ в бассейне выдержки атомной электростанции (АЭС) в идентичности установленного на рельсах транспортного средства, блока доставки в бассейн погружного прибора, дистанционного и дополнительного пультов с компьютером для программного управления работой комплекса, а в целом предлагаемый и известный робототехнические комплексы имеют различную конструкцию погружного прибора и выполняемую ими функцию и снабжены различным измерительно-техническим оборудованием, различными средствами программного обеспечения и имеют различное назначение и различные технические эффекты и результаты, в силу чего транспортное средство с блоком доставки в заявляемом комплексе можно считать как неосновными, а дополнительными и вспомогательными элементами, которые могут быть выполнены конструктивно по-иному.
Задача предлагаемой группы изобретений заключается в создании новой технологии и роботизированного комплекса по выявлению протечек бассейна выдержки АЭС с ярко выраженной акустической сигнатурой на основе современных средств автоматизации и программного управления, при этом акустической сигнатурой считается акустический сигнал, различимый как по амплитуде, так и по спектру частот в такой степени, что он может быть использован в диагностических целях.
Технический результат способа определения координат протечек бассейна выдержки АЭС с ярко выраженной акустической сигнатурой (далее - способ), заключающийся в мобильности и простоте его выполнения, достигается тем, что звук вытекающей из него воды преобразуют в электрический сигнал с помощью двухканального анализатора спектра электрических сигналов, и подвешенного на малошумящем кабеле - тросе погружного прибора с остронаправленным и фоновым гидрофонами, который доставляют в начальную точку  определения координат протечек над поверхностью БВ с помощью транспортного средства. Первая начальная точка - свободное место в ряду. Затем фиксируют погружной прибор, обеспечивают гироскопической стабилизацией строгое угловое его положение и начальную точку отсчета пеленга угла
определения координат протечек над поверхностью БВ с помощью транспортного средства. Первая начальная точка - свободное место в ряду. Затем фиксируют погружной прибор, обеспечивают гироскопической стабилизацией строгое угловое его положение и начальную точку отсчета пеленга угла . После чего проводят пошаговое его автоматическое погружение в воду, сканируют остронаправленным и фоновым гидрофоном пространство бассейна в пределах угла, равного ±180° на каждом шагу до получения максимального спектра сигнала. Далее определяют с учетом собственного фонового значения звука воды бассейна величину угла
. После чего проводят пошаговое его автоматическое погружение в воду, сканируют остронаправленным и фоновым гидрофоном пространство бассейна в пределах угла, равного ±180° на каждом шагу до получения максимального спектра сигнала. Далее определяют с учетом собственного фонового значения звука воды бассейна величину угла  , направление из координаты
, направление из координаты  на местонахождение течи. Повторное погружение с определением величины угла
на местонахождение течи. Повторное погружение с определением величины угла  выполняют в координатах
выполняют в координатах  - второго свободного места в другом ряду БВ. Затем программно рассчитывают по двум измерениям тригонометрическим методом координаты
- второго свободного места в другом ряду БВ. Затем программно рассчитывают по двум измерениям тригонометрическим методом координаты  фактического местонахождения протечки.
фактического местонахождения протечки.
Что же касается робототехнического комплекса для определения координат протечек бассейна выдержки АЭС с ярко выраженной акустической сигнатурой (далее - робототехнический комплекс), то его технический
результат - упрощение конструкции и повышение удобства его обслуживания обеспечивается тем, что он содержит подвижное транспортное средство с механизмом доставки, обеспечивающих возможность вертикального и
продольно-поперечного перемещения погружного прибора относительно
бассейна, фиксатор вертикального положения этого прибора и начальной точки
отсчета угла пеленга  до образовавшейся течи, дистанционный пульт,
до образовавшейся течи, дистанционный пульт,
снабженный компьютером для программного управления работой
робототехнического комплекса, дублирующий пульт управления того же
назначения и двухканальный анализатор спектров электрических сигналов
погружного прибора, представляющего собой полый цилиндрический корпус,
состоящий из неподвижного и подвижного модулей. Неподвижный модуль
включает в свой состав гиромотор, установленный на эластомере,
предназначенный для обеспечения устойчивого углового положения при
погружении его в воду, преобразователь питания гиромотора, устройство
поворота подвижного модуля (далее - устройство поворота), контроллер с
блоком выключателей, ограничивающих в пределах ±180° угол поворота
подвижного модуля, в котором перпендикулярно размещены остронаправленный и фоновый гидрофоны. Последние помещены в пенообразный поглотитель собственных колебаний корпуса, и которые подключены к двухканальному анализатору спектра электрических сигналов, связанным с компьютером. При этом погружной прибор подвешен на гибком малошумном кабеле-тросе, который перекинут через вращающийся блок, размещенный на опоре и наматываемый на вращающийся приводной барабан, смонтированный на опорной площадке механизма доставки, причем на вращающемся блоке имеются датчики веса и погружения прибора в воду, подключенные к контроллеру, соединенным с компьютером дистанционного пульта управления работой робототехнического комплекса.
Для сохранения целостности погружного прибора, подвижный его модуль снабжен с торца прямоугольными или сферическими скобами, что способствует доступу к нему звуковых волн шума воды протечки.
Транспортное средство, выполненное сборно-разборным, в виде металлической конструкции с колесами, перемещаемой над бассейном по существующим рельсам с механизмом доставки в виде подвижной тележки, имеющей возможность продольного перемещения по направляющим поперек транспортного средства позволяет быстро и удобно переместить погружной прибор в любую точку водного пространства бассейна выдержки для первоначального определения координат имеющейся протечки.
После первого выявления по углу  в координатах
в координатах  протечки для подтверждения достоверности выполняют повторное погружение прибора по этой же горизонтали с нахождением угла
протечки для подтверждения достоверности выполняют повторное погружение прибора по этой же горизонтали с нахождением угла  в координатах
в координатах  , а затем рассчитывают окончательное местонахождение протечки по следующей системе уравнений:
, а затем рассчитывают окончательное местонахождение протечки по следующей системе уравнений:
 , где
, где
 - расчетные координаты уточненной протечки бассейна выдержки;
- расчетные координаты уточненной протечки бассейна выдержки;
 - координаты по горизонтали, определенные в результате первого и второго погружения прибора;
- координаты по горизонтали, определенные в результате первого и второго погружения прибора;
 - координаты глубины погружения прибора до максимального звукового сигнала протечки;
- координаты глубины погружения прибора до максимального звукового сигнала протечки;
tgϕ1=Δy1/Δх1; tgϕ2=Δy2/Δх2.
Предлагаемая группа изобретений является новой, поскольку совокупность признаков формулы способа и робототехнического комплекса в источниках патентной и общетехнической литературы заявителем не обнаружена.
Заявляемая группа изобретений, отражающая совокупный творческий авторский замысел, по нашему мнению, обладает изобретательским уровнем, поскольку создание мобильного способа с помощью погружного прибора с обеспечением гироскопической стабилизацией его углового положения  -начальную точку отсчета пеленга, а также пошаговое сканирование бассейна в пределах угла, равного ±180°, обеспечиваемого автоматически контроллером с блоком выключателей не является очевидным. Более того, для обеспечения мобильности способа была создана конструкция погружного прибора цилиндрической формы диаметром до 160 мм, что позволяет поместить его практически в любую точку бассейна.
-начальную точку отсчета пеленга, а также пошаговое сканирование бассейна в пределах угла, равного ±180°, обеспечиваемого автоматически контроллером с блоком выключателей не является очевидным. Более того, для обеспечения мобильности способа была создана конструкция погружного прибора цилиндрической формы диаметром до 160 мм, что позволяет поместить его практически в любую точку бассейна.
Для подтверждения возможной реализации способа разработана конструкторская документация, изготовлен макетный образец, проведены испытания, получены результаты, подтверждающие его мобильность и производительность при выявлении протечек бассейна выдержки.
Чтобы исключить влияние посторонних звуковых колебаний от иных источников шума, применены полученные экспериментальным путем эталонные спектры звуковых колебаний проточек бассейна выдержки.
Программное обеспечение компьютера дает возможность анализа аудиосигналов, а также фиксирования вертикальной координаты прибора в бассейне.
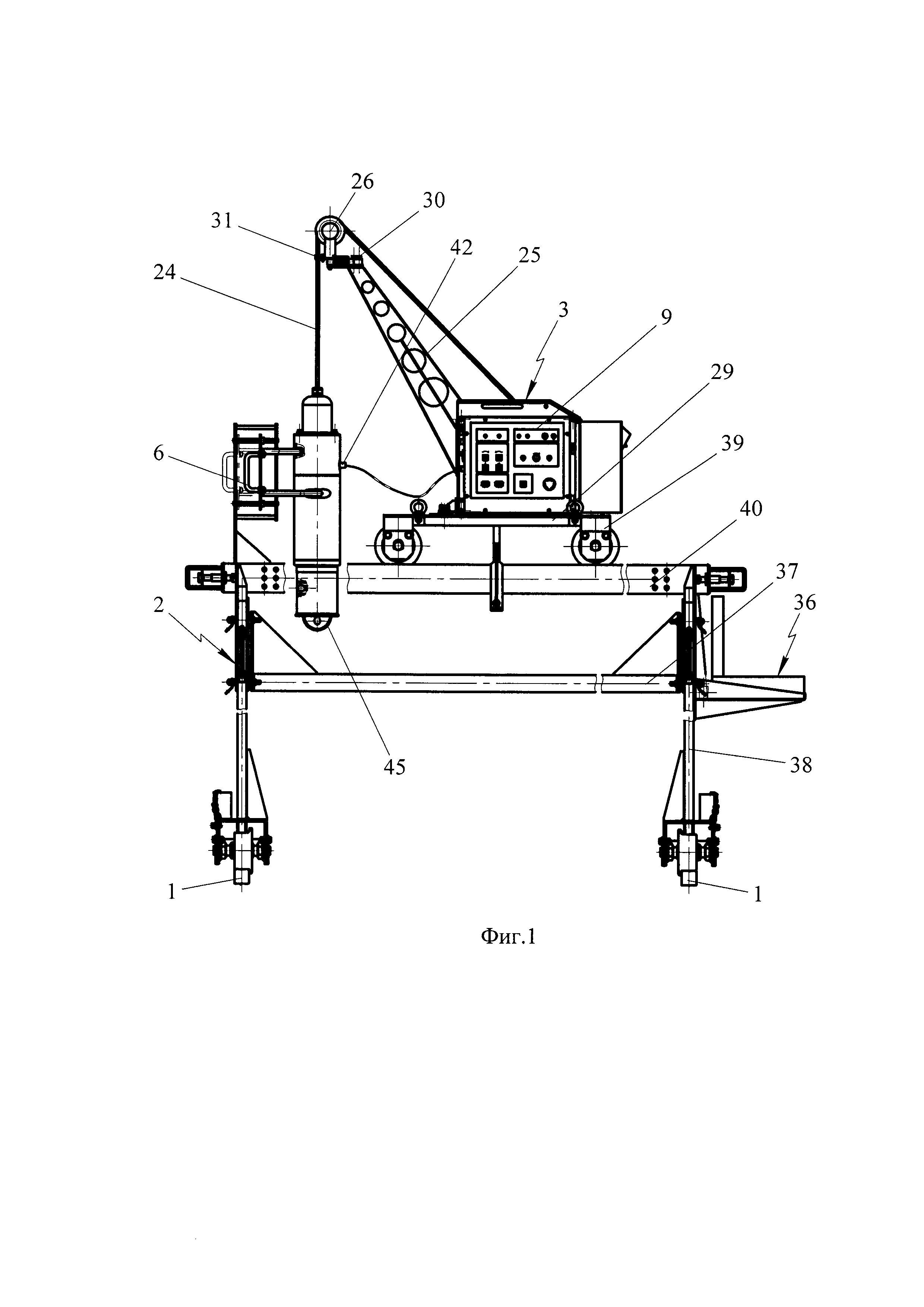
Изобретение проиллюстрировано чертежами, где на фиг. 1 изображен общий вид робототехнического комплекса, на фиг. 2 показан общий вид погружного прибора, на фиг. 3 - общий вид погружного прибора в разрезе, схема определения координат протечки отражена на фиг. 4, на фиг. 5 изображена структурная схема робототехнического комплекса.
Способ определения координат протечек бассейна выдержки АЭС с ярко выраженной акустической сигнатурой реализуется полностью принципом действия робототехнического комплекса, который содержит в своем составе установленное на существующем рельсовом пути 1 подвижное транспортное средство 2, механизм 3 доставки в бассейн выдержки погружного прибора 5, фиксатор 6 вертикального углового положения прибора 5, дистанционный пульт 7, снабженный компьютером 8 для программного управления работой робототехнического комплекса, дублирующий пульт 9 управления идентичного назначения и двухканальный анализатор 10 спектров электрических сигналов погружного прибора 5, представляющего собой полый цилиндрический корпус 11, состоящий из неподвижного и подвижного модулей, соответственно 12 и 13. Неподвижный модуль 12 включает в свой состав гиромотор 14, установленный на эластомере 15, предназначенным для обеспечения устойчивого углового положения при опускании погружного прибора 5 в воду, преобразователь 16 питания гиромотора 14, поворотное устройство 17 вращения подвижного модуля 13, контроллер 18 с блоком выключателей 19, ограничивающих в пределах ±180° угол поворота подвижного модуля 13, в котором перпендикулярно размещены остронаправленный гидрофон 20 и такой же гидрофон 21 фоновый для регистрации собственного шума воды бассейна выдержки, помещенные в пенообразный поглотитель 22 для ликвидации собственных колебаний корпуса 11. Оба гидрофона 20 и 21 подключены к двухканальному анализатору 10 спектров электрических сигналов, связанным в свою очередь с компьютером 8 дистанционного пульта 7 управления работой робототехнического комплекса. Фиксатор 6 начального положения погружного прибора выполнен в виде стойки с тремя подпружиненными пальцами (на фиг. не показаны), согласованными с тремя пазами 23 и предназначен для обеспечения строгой вертикальности при проведении гироскопической стабилизации погружного прибора 5 при его опускании в воду, поскольку упомянутый прибор подвешен на гибком малошумном кабеле-тросе 24, который перекинут через вращающийся на опоре 25 блок 26 и наматываемый на вращаемый приводом 27 барабан 28 (на фиг.1 не показан), смонтированный на опорной площадке 29 механизма 3 доставки. На вращающемся блоке 26 имеются датчик 30 веса и датчик 31 погружения прибора 5 в воду, которые подключены к контроллеру 32, подсоединенным к компьютеру 8 дистанционного пульта 7 управления работой робототехнического комплекса. Работой погружного прибора 5 при необходимости можно управлять и с дублирующего пульта 9. Поворотное устройство 17 выполнено в виде шагового мотор-редуктора, на удлиненном валу 33 которого смонтирован абсолютный шифратор 34 угла поворота и на котором закреплен подвижный модуль 13. Процесс включения и выключения его поворота осуществляется контроллером 18, концы 35 которого через шифратор 34 присоединены к входам поворотного устройства 17. Абсолютный шифратор 34 отмечает точное значение углов поворота  и
и  подвижного модуля 13.
подвижного модуля 13.
Транспортное средство 2 представляет собой сборно-разборную металлоконструкцию 36 в виде рамы 37 со стойками 38 с колесами, перемещаемую относительно бассейна выдержки, а механизм 3 доставки погружного прибора 5 к месту его погружения представляет собой тележку 39, перемещаемую по направляющим 40 поперек транспортного средства и имеющую опорную площадку 29, на которой смонтирован вращающийся барабан 28 и размещён дополнительный дублирующий пульт 9. На верхней поверхности корпуса 11 в колпаке размещен разъём 42 для подключения кабеля-троса 24, а разъём 43 предназначен для временного питания гиромотора 14, а для обеспечения герметичности модулей 12 и 13 при их погружении в воду используется сальниковая манжета 44.
Фоновый гидрофон 21 для сохранения его целостности снабжен защитным ограждением 45, выполненным в виде прямоугольных или сферической формы скоб, обеспечивающих доступ звука шума воды к этому гидрофону.
Способ определения координат протечек бассейна выдержки АЭС с ярко выраженной акустической сигнатурой реализуется работой робототехнического комплекса следующим образом.
Для проведения работ по определению координат протечек бассейна выдержки погружной прибор 5 подвешивают на кабеле-тросе 24 механизма 3 доставки и проводят общее включение с дистанционного или дублирующего пульта 9 управления работой робототехнического комплекса. Затем с помощью транспортного средства 2 и механизма 3 доставки перемещают погружной прибор 5 в точку исследования на координаты  устанавливают его по трем пазам 23 корпуса 11 в фиксатор 6, обеспечивая его вертикальную неподвижность и угол пеленга
устанавливают его по трем пазам 23 корпуса 11 в фиксатор 6, обеспечивая его вертикальную неподвижность и угол пеленга  на крайнем концевом выключателе блока 19 выключателей поворотного устройства 17 и через разъём 42 подключают питание гиромотора 14 от внешнего источника. Гиромотор 14 раскручивается при включенном оборудовании робототехнического комплекса. После раскрутки гиромотора 14 отсоединяют внешнее его питание и включается внутренний преобразователь 16, обеспечивая вращение гироскопа до 15000 оборотов в минуту. Установив гироскопической стабилизацией строгое угловое положение прибора и убрав фиксатор 6, осуществляют пошаговое его автоматическое погружение в воду, сканируя при этом с помощью остронаправленного гидрофона 20 в пределах угла, равного ±180° на каждом шагу до получения максимального спектра сигнала. Одновременно гидрофоном 21 определяют собственное фоновое значение звука воды бассейна выдержки. Звуковые сигналы с гидрофонов 20 и 21 поступают на двухканальный анализатор 10 спектров электрических сигналов, а от него на компьютер 8 дистанционного пульта 7 управления работой робототехнического комплекса. Координату
на крайнем концевом выключателе блока 19 выключателей поворотного устройства 17 и через разъём 42 подключают питание гиромотора 14 от внешнего источника. Гиромотор 14 раскручивается при включенном оборудовании робототехнического комплекса. После раскрутки гиромотора 14 отсоединяют внешнее его питание и включается внутренний преобразователь 16, обеспечивая вращение гироскопа до 15000 оборотов в минуту. Установив гироскопической стабилизацией строгое угловое положение прибора и убрав фиксатор 6, осуществляют пошаговое его автоматическое погружение в воду, сканируя при этом с помощью остронаправленного гидрофона 20 в пределах угла, равного ±180° на каждом шагу до получения максимального спектра сигнала. Одновременно гидрофоном 21 определяют собственное фоновое значение звука воды бассейна выдержки. Звуковые сигналы с гидрофонов 20 и 21 поступают на двухканальный анализатор 10 спектров электрических сигналов, а от него на компьютер 8 дистанционного пульта 7 управления работой робототехнического комплекса. Координату , то есть глубину погружения прибора 5 определяют с помощью датчика 31, сигналы с которого по кабелю 24 поступают на контроллер 32, а затем на компьютер 8 пульта 7, где и фиксируются их значения. Величина угла
, то есть глубину погружения прибора 5 определяют с помощью датчика 31, сигналы с которого по кабелю 24 поступают на контроллер 32, а затем на компьютер 8 пульта 7, где и фиксируются их значения. Величина угла  и координаты
и координаты  рассчитываются с учетом разности сигналов от остронаправленного и фонового гидрофонов 20 и 21.
рассчитываются с учетом разности сигналов от остронаправленного и фонового гидрофонов 20 и 21.
После нахождения координат  и угла
и угла  транспортным средством 2 и механизмом 3 доставки погружной прибор 5 перемещают по горизонтали в другую точку с координатами
транспортным средством 2 и механизмом 3 доставки погружной прибор 5 перемещают по горизонтали в другую точку с координатами , а затем программно рассчитывают по двум измерениям тригонометрическим методом фактическое местонахождение протечки, исходя из следующей системы из 2-х линейных уравнений:
, а затем программно рассчитывают по двум измерениям тригонометрическим методом фактическое местонахождение протечки, исходя из следующей системы из 2-х линейных уравнений:
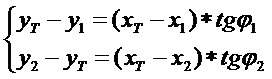 .
.
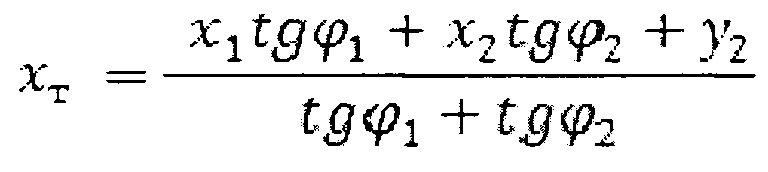
Решив эту систему уравнений, получают координаты протечки :
:
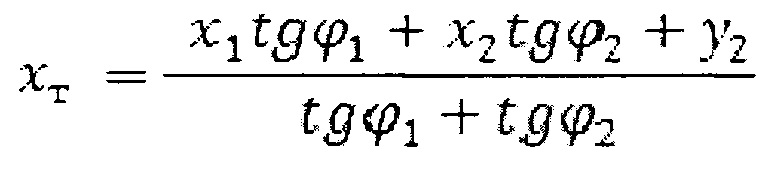
 , где
, где
 - расчетные координаты уточненной протечки бассейна выдержки;
- расчетные координаты уточненной протечки бассейна выдержки;
 и
и  - координаты по горизонтали, определенные в результате первого и второго погружения прибора;
- координаты по горизонтали, определенные в результате первого и второго погружения прибора;
tgϕ1=Δy1/Δх1; tgϕ2=Δy2/Δх2.
Координаты  и
и  равны между собой, поскольку по вертикали опущены на одну и ту же глубину до получения максимального сигнала звука воды утечки.
равны между собой, поскольку по вертикали опущены на одну и ту же глубину до получения максимального сигнала звука воды утечки.
Указанное изобретение из-за мобильности и простоте применения может быть успешно использовано при ремонте и при испытании вновь изготавливаемых бассейнах выдержки АЭС по выявлению их протечек.
Источники информации, принятые во внимание при оформлении заявки
1. Авторское свидетельство СССР №1582813 G01МЗ/20 опубл. 15.09.1994 г.
2. Патент РФ № 2092803 G01МЗ/20, опубл. 10.10.1997 г.
3. Патент РФ № 2387964 G01МЗ/20, опубл. 17.04.2010 г.
4. Патент на полезную модель РФ № 100817 F24FЗ/14, опубл. 27.12.2010 г.
5. Патент на полезную модель РФ № 111709 G21С17/02, опубл. 10.12.2011 г.
6. Патент РФ № 2589726 G21С17/22, опубл. 10.07.12016 г.
7. Патент США № 3838593 G01МЗ/24, опубл. 1.10.1974 г.
8. Патент Канады № СА2437496 G01МЗ/24, опубл. 129.08.2002 г.
9. Патент РФ №2115105 G01МЗ/24, опубл. 10.07.1998 г.
1. Патент РФ № 1398778 G01МЗ/24, опубл. 2305.1988 г.
2. Заявка на изобретение № 2004110994 G01МЗ/24, опубл. 20.09.2005 г.
3. Авторское свидетельство СССР №906686 В25J5/00 опубл.23.02.1982 г.


Способ имитационной калибровки измерительных каналов системы управления разгрузочно-загрузочной машины ядерного реактора
Способ балансировки рабочего колеса гидравлической турбины
Крановые тензорезисторные весы
Система мониторинга протечек бассейна выдержки атомной электростанции
Способ автоматического контроля снимаемой альфа-загрязненности твэлов и устройство для его осуществления
Опорно-поворотное устройство
Способ измерения концентрации гелия в тепловыделяющем элементе
Устройство считывания кода ампул оят
Способ статической балансировки рабочего колеса гидравлической турбины
Способ контроля вертикальности штабеля контейнеров с радиоактивными отходами
Способ имитационной калибровки измерительных каналов системы управления разгрузочно-загрузочной машины ядерного реактора
Способ балансировки рабочего колеса гидравлической турбины
Крановые тензорезисторные весы
Система мониторинга протечек бассейна выдержки атомной электростанции
Способ автоматического контроля снимаемой альфа-загрязненности твэлов и устройство для его осуществления
Опорно-поворотное устройство
Способ измерения концентрации гелия в тепловыделяющем элементе
Устройство считывания кода ампул оят
Способ статической балансировки рабочего колеса гидравлической турбины
Способ статической балансировки рабочего колеса гидравлической турбины

