Результат интеллектуальной деятельности: Опорно-поворотное устройство
Вид РИД
Изобретение
Изобретение относится к машиностроению и может быть использовано для привода телекамер, антенн и других объектов пространственного ориентирования по азимуту и углу места.
Известно опорно-поворотное устройство (ОПУ), состоящее из неподвижного основания, вращающейся платформы, механизма ее вращения вокруг вертикальной оси и механизма подъема с установленной переходной частью антенны относительно горизонтальной оси с возможностью фиксации, по крайней мере, в рабочем положении относительно вращающейся платформы. В данном устройстве механизм подъема и вращения выполнены в виде системы из волновой дифференциальной передачи и простой дифференциальной передачи, одновенцовый сателлит которой соединен с неподвижным колесом, закрепленным жестко на неподвижном основании, и установлен в цилиндрическом шарнире, закрепленном на вращающейся платформе. Генератор же волн волновой дифференциальной передачи соединен, по крайней мере, с одним приводом, одно колесо которой соединено посредством ее корпуса, установленного в шарнирах стоек вращающейся платформы, с установленной частью антенны, а другое колесо волновой дифференциальной передачи соединено с ее выходным валом, который посредством одной механической передачи связан с вращающейся платформой, выполненной с возможностью фиксации относительно основания стопорным устройством (см. патент РФ на изобретение №2134003, H01Q 3/08, опубл. 27.07.1999 г.).
Недостаток данного устройства заключается в том, что оно сложно кинематически и в эксплуатации из-за наличия в его конструкции волновой дифференциальной передачи, гибкое колесо и волновой генератор которой требуют практически индивидуального, дорогостоящего, весьма трудоемкого изготовления. И более того, рассматриваемое устройство не обладает в работе достаточной надежностью из-за поломки гибкого колеса и износа зубьев на их концах, а в отдельных случаях возможно возникновение вибраций.
Известно также и опорно-поворотное устройство, выполненное в виде вертикальной колонны, нижняя часть которой представляет собой неподвижный цилиндрический корпус, вдоль оси которого размещен двигатель азимутального привода. С этим корпусом посредством подшипника состыкован с возможностью вращения поворотным корпусом такого же радиуса, образующим верхнюю часть колонны. Азимутальный привод выполнен в виде планетарного редуктора с разноименным зацеплением колес (внешним и внутренним). Солнечное колесо внешнего зацепления посажено на вал двигателя, водилом является неподвижный цилиндрический корпус - опора, а коронное колесо внешнего зацепления размещено на внутренней поверхности поворотного корпуса. В этом поворотном корпусе установлена ось вращения по углу места и поворотная платформа, на которой крепится объект пространственного ориентирования, в частности, антенна.
Механизм поворота по углу места представляет собой линейный привод, связанный с помощью шарниров и тяги с поворотной платформой, с образованием плеча относительно угломестной оси, а линейный привод выполнен в виде закрепленного внутри поворотного корпуса электродвигателя, связанного зубчатой передачей с винтом передачи винт-гайка. Такой линейный привод для обеспечения требуемой точности поворота должен иметь низкоскоростной двигатель или понижающий редуктор с высоким передаточным отношением. Данный аналог по функциональному назначению принят в качестве прототипа (см. патент США №4691207, H01Q 3/08, опубл. 01.09.1987 г.). К числу недостатков этого ОПУ следует отнести его недостаточную надежность, так как посадка поворотного корпуса относительно неповоротного выполнена всего лишь на одних подшипниках, а кроме того в устройстве не решена проблема безопасного вывода проводов питания угломестного двигателя к неподвижным электрическим соединителям, а выполнение средства управления работой устройства в виде компьютерной системы усложняет его конструкцию, удорожает стоимость и снижает точность наведения.
Задача предлагаемого изобретения заключается в устранении недостатков аналогов, а именно повышение надежности работы устройства и точности поворота платформы объекта ориентирования в пространстве по азимуту и углу поворота.
Указанный технический результат - повышение надежности и точности работы ОПУ - обеспечивается тем, что оно состоит из автономных модулей, модуля поворота платформы объекта ориентирования в пространстве по азимуту и модуля качания этой платформы по углу места с блоками их управления. Модуль поворота платформы объекта ориентирования в пространстве по азимуту (азимутальный модуль) выполнен в виде двух коаксиальных цилиндрической формы корпусов, внешнего поворотного с подвижной платформой и внутреннего неподвижного с прорезью корпуса, установленного на основании с расположенным внутри приводом вращения внешнего корпуса по азимуту, который представляет собой смонтированный в каркасе на нижнем фланце мотор-редуктор с зубчатой шестерней на верхнем фланце, входящее в зацепление с нижним зубчатым колесом двойного блока зубчатых колес. Верхнее ведущее колесо этого блока в свою очередь контактирует через прорезь внутреннего неподвижного корпуса с коронным зубчатым венцом, жестко установленным на внутренней поверхности внешнего корпуса, имеющего возможность поворота на подшипниках скольжения, жестко закрепленных на внешней поверхности неподвижного внутреннего корпуса. На этом же верхнем фланце закреплен и конечный выключатель поворота ОПУ. При этом на оси двойного блока зубчатых колес предусмотрен абсолютный шифратор измерения азимута, установленный на другом верхнем фланце, жестко соединенных между собой пространственно стяжками, а с нижнем фланцем они связаны опорными стойками, на которых размещены платы контроллера азимута, управления двигателем мотор-редуктора и датчик температуры, на этом же верхнем фланце, на оси зубчатой шестерни имеется многооборотный резистор, дублирующий контроль азимутального угла поворота платформы с объектом пространственного ориентирования. Другой автономный модуль качания платформы по углу места кинематически связан с подвижной платформой азимутального модуля и выполнен в виде металлического цилиндрической формы корпуса с крышкой, дном и фланцем, соединенных опорными стойками, на которых закреплены печатные платы контроллера угла места, управления двигателем мотор-редуктора, датчик температуры и концевые выключатели крайних положений платформы по углу места. Внутри этого корпуса имеется привод качания платформы, включающий мотор-редуктор с зубчатой шестерней, взаимодействующей с зубчатым колесом, резьбовой вал которого связан с подвижным штоком с внутренней резьбой, обеспечивая его прямолинейное поступательное перемещение, изменяя угол наклона платформы с объектом пространственного ориентирования, причем зубчатая шестерня мотор-редуктора снабжена многооборотным резистором, а зубчатое колесо имеет абсолютный шифратор измерения угла места для повышения надежности контроля угла поворота платформы. Для обеспечения контроля крайних положений поворотной платформы внешний поворотный корпус азимутального модуля снабжен ферромагнитным маркером, совпадающим по уровню с концевым выключателем, а сам корпус выполнен из немагнитного материала.
Устройство также характеризуется и тем, что предел поворота платформы с объектом ориентирования по углу места составляет 30°, по углу азимута - 360°. Отличительной особенностью устройства является и то, что для повышения его надежности в условиях крайних и южных широт путем расширения диапазона температурного интервала от минус 50 до плюс 50°C его работы, мотор-редукторы обоих модулей снабжены нагревательными элементами, выполненными, например, из намотанной на их поверхности нихромовой проволоки, или в виде нанесенной на эти поверхности с высоким сопротивлением электропроводной пленки, соединенных с датчиком температуры. Еще одной отличительной особенностью устройства является то, что блок управления каждого модуля представляет собой по две печатные платы, соответственно, контроллера азимута и контроллера угла места, а также платы управления двигателями мотор-редукторов, составляющие общую электронную блок-схему его работы с обратной связью и содержащую несколько процессоров, отслеживающих углы поворота по азимуту и углы места автоматически.
Для удобства сборки устройства в донной части основания азимутального модуля выполнены пазы, а в его корпусе имеются винты, перемещающие привод с шестерней-сателлитом до контакта с коронным венцом подвижного внешнего корпуса.
Предлагаемое изобретение обладает новизной, поскольку совокупность существенных признаков формулы изобретения в источниках общетехнической и патентной информации не выявлена.
Заявляемое в качестве изобретения ОПУ обладает изобретательским уровнем, так как наличие двух автономных модулей позволяет разместить внутри их корпусов отдельные блоки управления работой устройства с обратной связью, образующих единую электронную блок-схему, включающую несколько процессоров, отслеживающих углы поворота по азимуту и качания по углу места автоматически, что не является очевидным, не является очевидным и наличие ферромагнитного маркера для начала отсчета поворота внешнего немагнитного корпуса с поворотной платформой относительно концевого выключателя, размещенного внутри неподвижного корпуса.
Указанные отличительные признаки не имеются в выявленных аналогах, указанных в информации, принятой во внимание при оформлении заявки на предполагаемое изобретение.
По заявленному изобретению уже изготовлен опытный образец, проводится его опытное испытание.
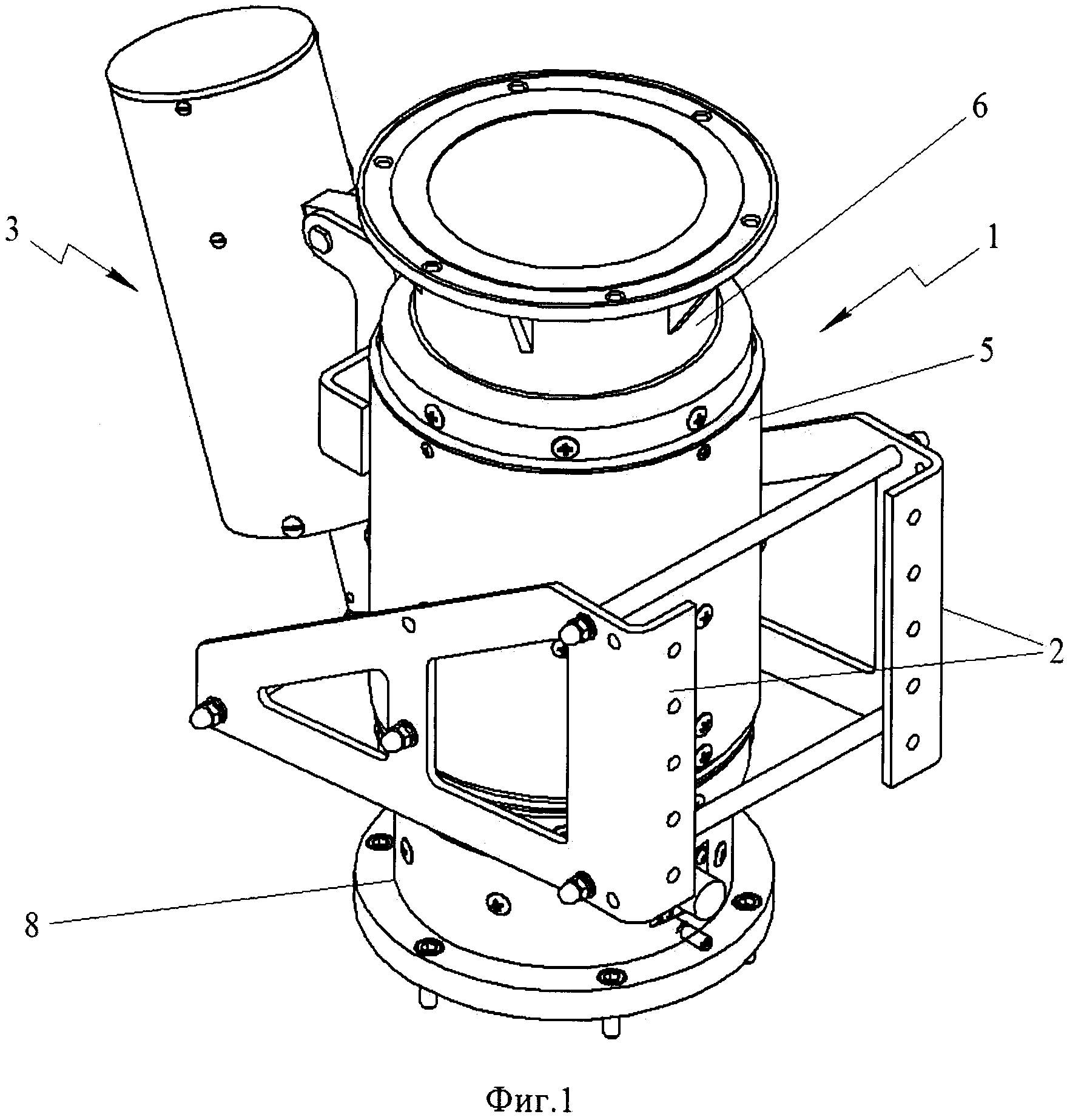
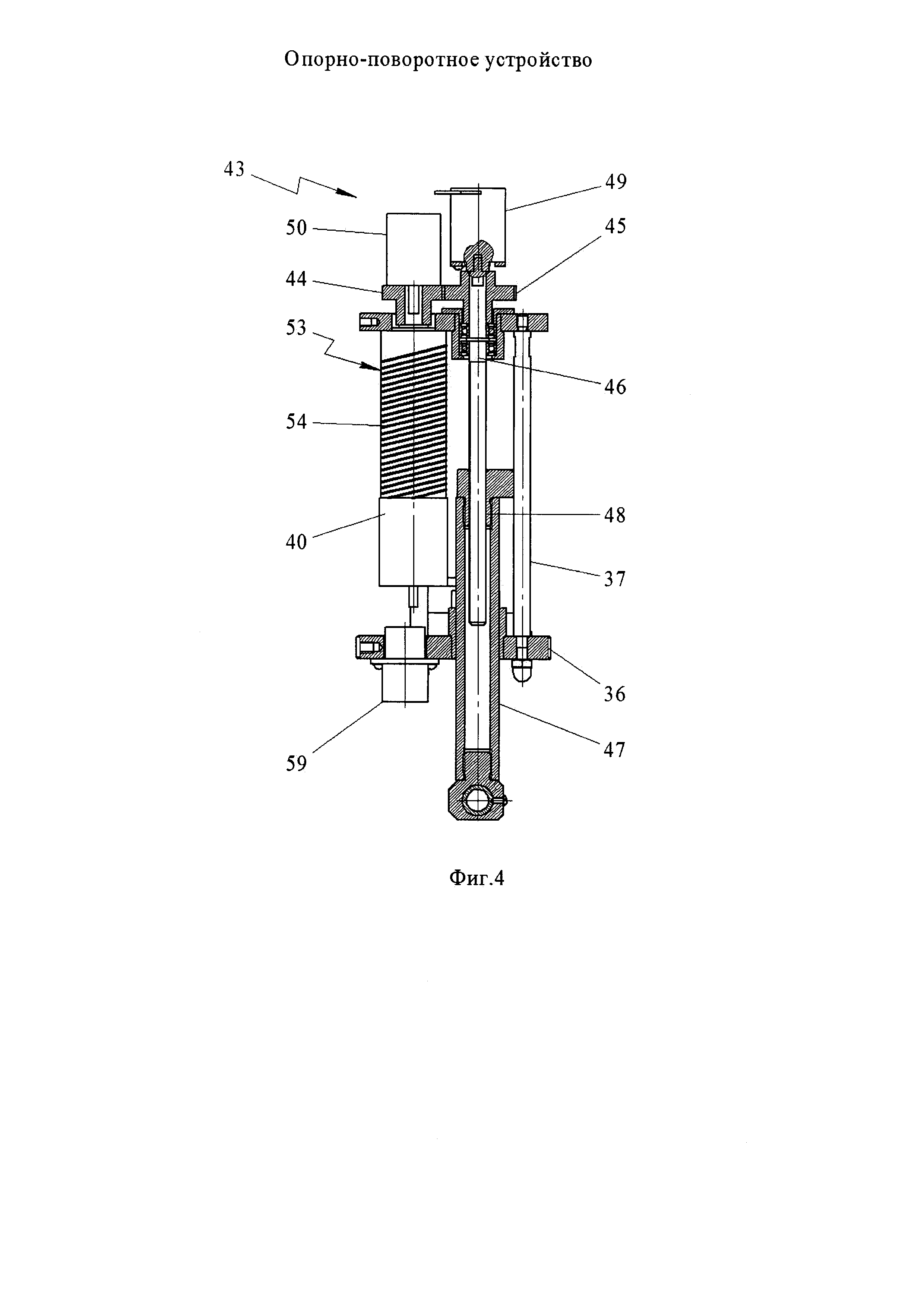
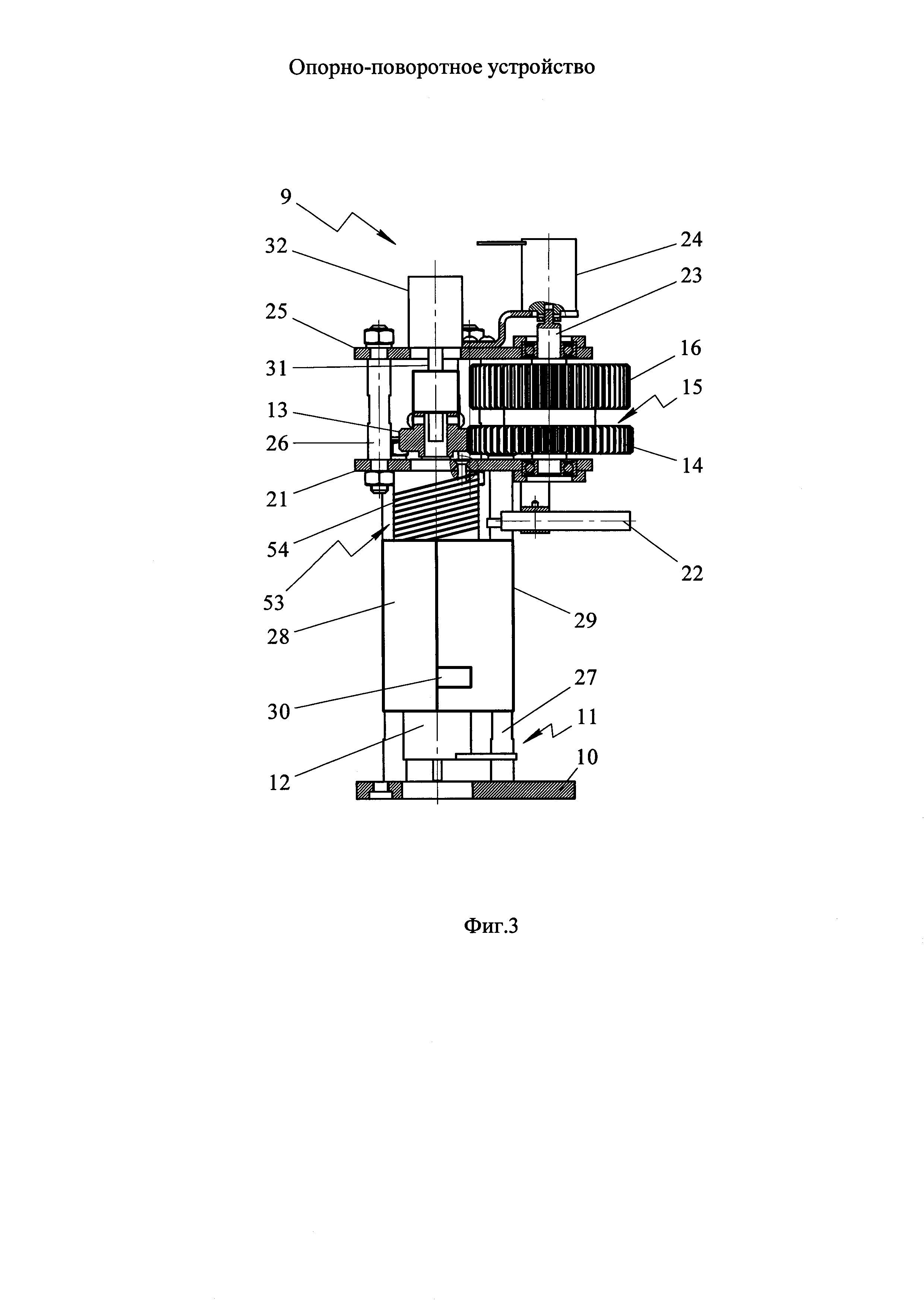
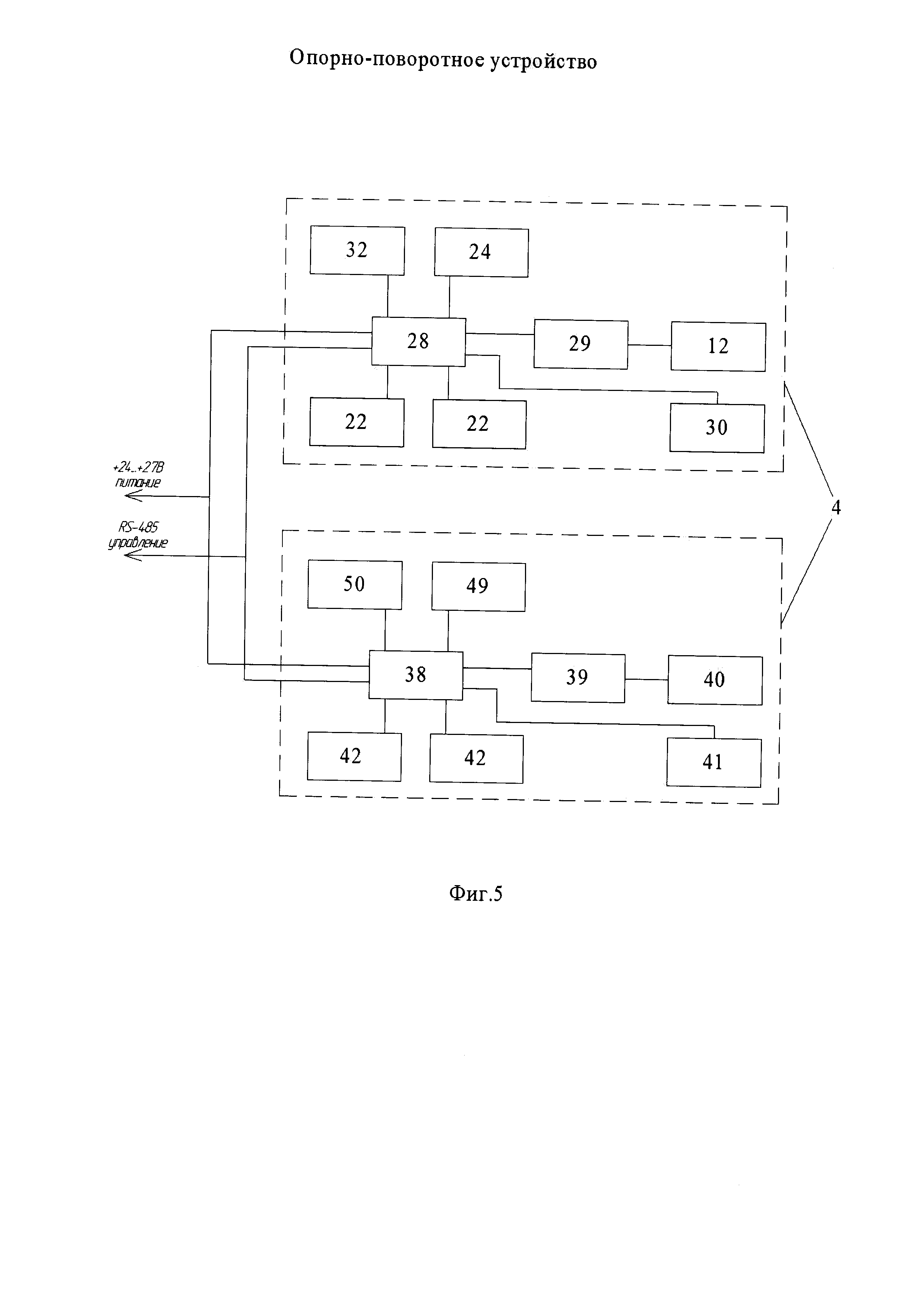
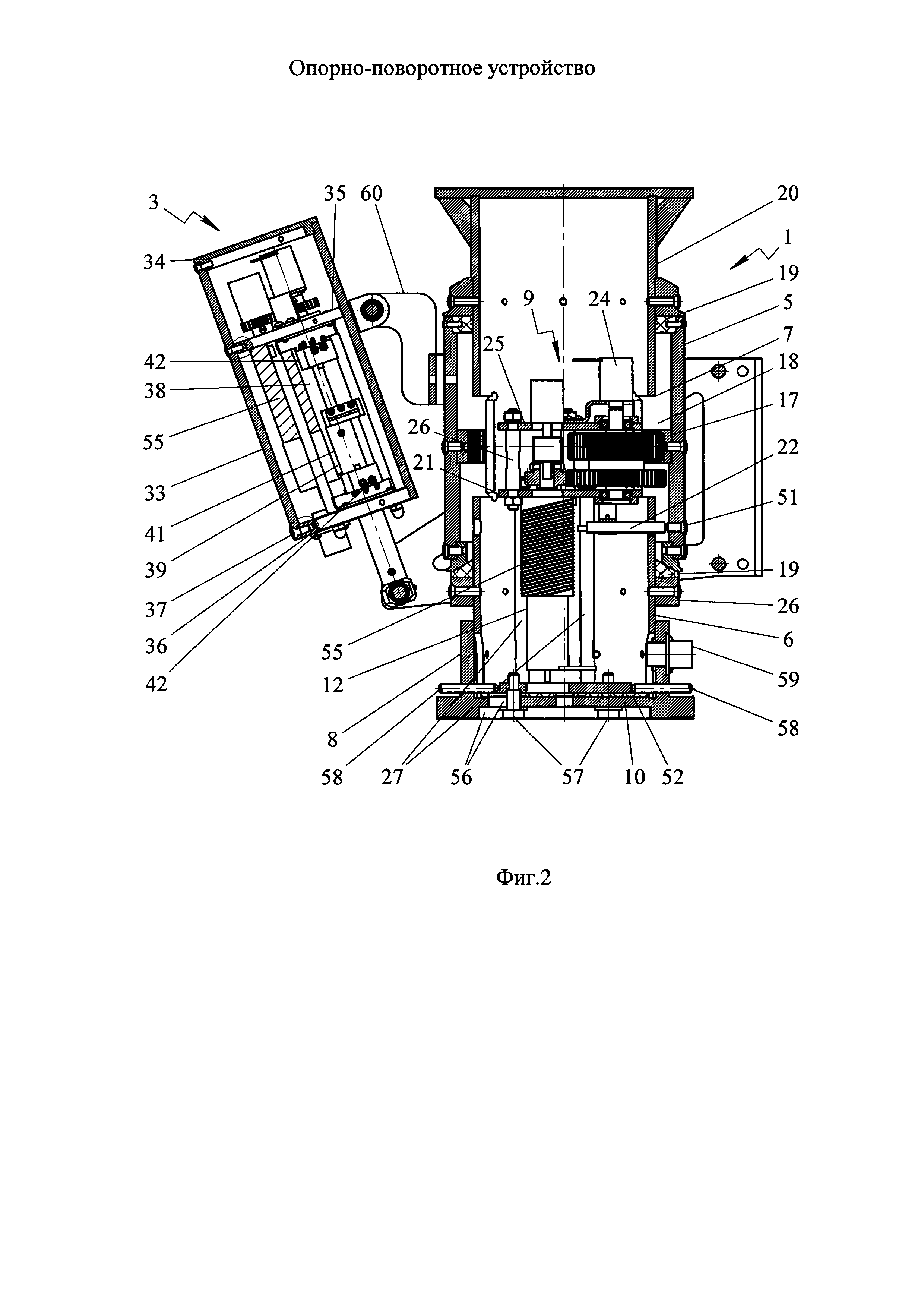
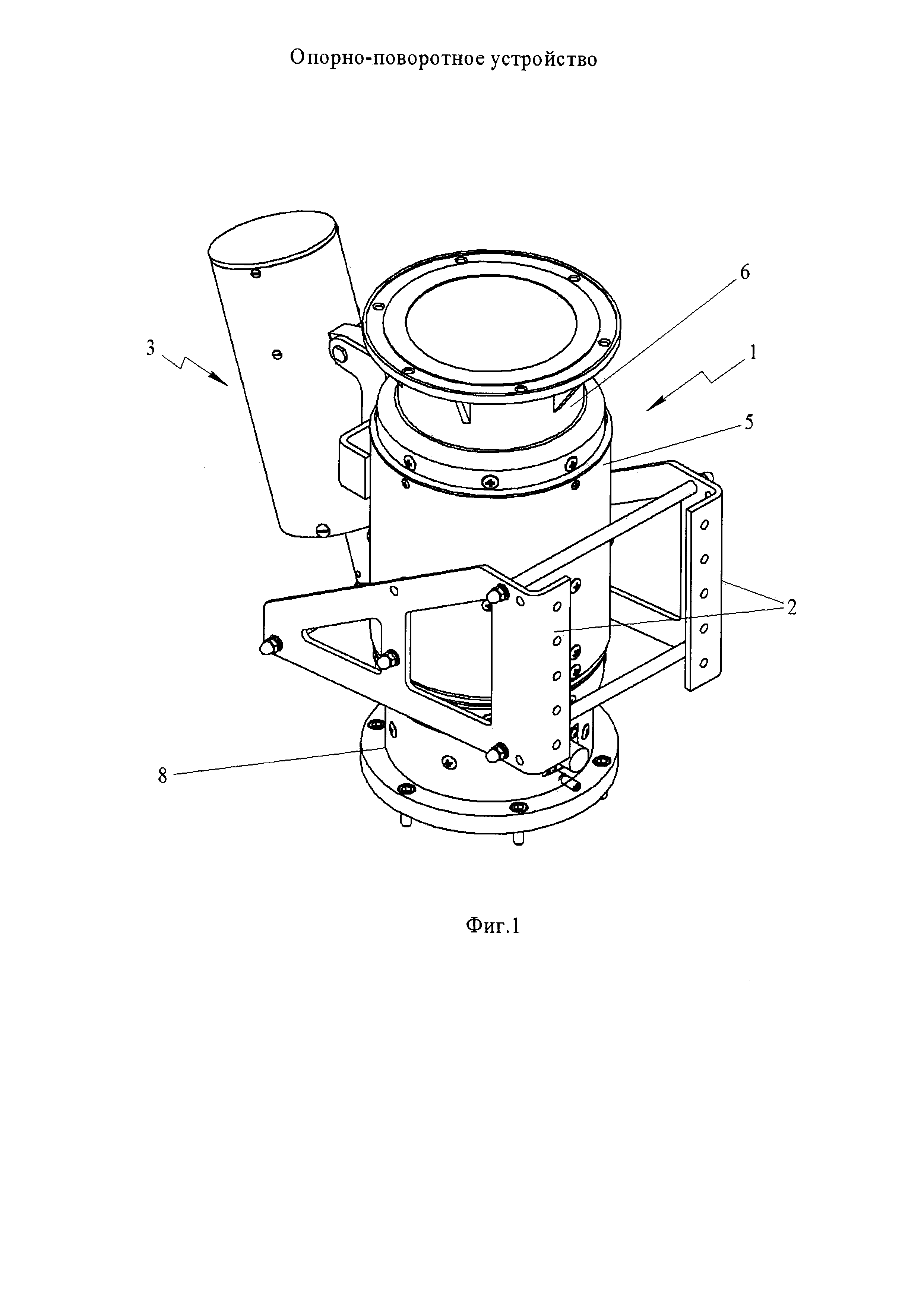
Заявляемое опорно-поворотное устройство проиллюстрировано чертежами, где на фиг. 1 показан его общий вид в аксонометрии, на фиг. 2 изображен общий вид в разрезе по оси симметрии, на фиг. 3 отражен общий вид привода азимутального модуля, на фиг. 4 изображен привод модуля качания поворотной платформы, и на фиг. 5 показана блок-схема управления работой ОПУ.
Опорно-поворотное устройство состоит из автономного модуля 1 поворота платформы 2 объекта ориентирования в пространстве по азимуту (азимутальный модуль) и модуля 3 качания этой платформы 2 по углу места (модуль качания) с блоками 4 их управления. Азимутальный модуль 1 выполнен в виде двух коаксиальных цилиндрической формы корпусов 5 и 6 соответственно, внешнего поворотного с подвижной платформой 2 и внутреннего с прорезью 7 неподвижного, установленного на основании 8 с расположенным внутри приводом 9 вращения внешнего корпуса 5 по азимуту. Привод 9 представляет собой смонтированный на нижнем фланце 10 каркаса 11 мотор-редуктор 12 с зубчатой шестерней 13, входящей в зацепление с нижним зубчатым колесом 14 двойного блока 15 зубчатых колес, верхнее ведущее колесо 16 которого контактирует через прорезь 7 внутреннего неподвижного корпуса 6 с коронным зубчатым венцом 17, жестко установленным на внутренней поверхности 18 внешнего корпуса 5, имеющего возможность поворота на подшипниках 19 скольжения, жестко закрепленных на внешней поверхности 20 неподвижного внутреннего корпуса 6. Зубчатая шестерня 13 и двойной блок 15 зубчатых колес 14 и 16 размещены на верхнем фланце 21, на этом же фланце закреплен и конечный выключатель 22 поворота ОПУ по азимуту. При этом на оси 23 блока 15 зубчатых колес предусмотрен абсолютный шифратор 24 измерения азимута, установленный на другом верхнем фланце 25, который жестко соединен с первым верхним фланцем 21 стяжками 26, а вместе они связаны с нижнем фланцем 10 опорными стойками 27, на которых размещены платы 28 и 29 контроллера азимута, управления двигателем мотор-редуктора 12 и датчик температуры 30. На фланце 25 на оси 31 зубчатой шестерни 13 имеется многооборотный резистор 32, дублирующий контроль азимутального угла поворота платформы 2 с объектом пространственного ориентирования. Другой автономный модуль 3 качания платформы 2 по углу места установлен подвижно на внешнем поворотном корпусе 5 и кинематически связан с подвижной платформой 2 азимутального модуля 1. Модуль качания 3 выполнен в виде металлического цилиндрической формы корпуса 33 с крышкой 34, фланцем 35 и дном 36, соединенных опорными стойками 37, на которых закреплены печатные платы 38 и 39 контроллера угла места, управления двигателем мотор-редуктора 40, датчик температуры 41 и концевые выключатели 42 крайних положений платформы 2 по углу места. Внутри корпуса 33 имеется привод 43, включающий мотор-редуктор 40 с зубчатой шестерней 44, взаимодействующей с зубчатым колесом 45, резьбовой вал 46 которого связан с подвижным штоком 47 с внутренней резьбой 48, обеспечивая его прямолинейное поступательное перемещение, изменяя угол наклона платформы 2 с объектом пространственного ориентирования. В модуле качания 3 зубчатое колесо 45 также снабжено абсолютным шифратором 49 измерения угла места, а зубчатая шестерня 44 мотор-редуктора 40 имеет многооборотный резистор 50 для повышения надежности контроля угла качания платформы 2. Для начального отсчета угла поворота ОПУ, внешний его корпус 5 снабжен ферромагнитным маркером 51 и поэтому указанный корпус выполнен из немагнитного материала, например, алюминия. Предел поворота платформы 2 по азимуту составляет 360°, а по углу места - 30°. Для обеспечения легкости скольжения и поворота подвижного внешнего корпуса 5 относительно внутреннего подшипники 19 скольжения и прокладка 52 выполнены из тефлона, а для повышения надежности в эксплуатации ОПУ путем расширения диапазона температурного интервала от минус 50 до плюс 50°С мотор-редукторы 12 и 40 обоих модулей 1 и 3 снабжены нагревательными элементами 53, выполненными, например, из намотанной на их поверхности нихромовой проволоки 54, или в виде нанесенной на эти же поверхности с высоким сопротивлением электропроводной пленки 55, соединенных с датчиками 30 и 41 температуры.
Чтобы осуществить коаксиальную сборку корпусов 5 и 6 и введение зубчатого колеса 16 через прорезь 7 внутреннего неподвижного корпуса 6 до контакта с коронным венцом 17, в донной части основания 8 азимутального модуля 1 выполнены пазы 56 для закрепления нижнего фланца 10 каркаса 11 крепежными винтами 57, а в основании имеются винты 58, перемещающие привод 9 с шестерней 13 и двойным блоком 15 зубчатых колес 14 и 16 до контакта с коронным венцом 17 подвижного внешнего корпуса 5.
Блок 4 управления ОПУ каждого модуля 1 и 3 представляет собой по две печатные платы 28-29 и 38-39 соответственно контроллера азимута и контроллера угла места. Контроллер азимута связан и управляет работой абсолютного шифратора 24 многооборотного резистора 32, концевым выключателем 22, датчиком температуры 30 и платой 29 управления двигателем мотор-редуктора 12 азимутального модуля 1. Модуль 3 качания платформы 2 в вертикальном направлении управляется контроллером угла места, который связан с абсолютным шифратором 49, многооборотным резистором 50, концевыми выключателями крайних положений платформы 2, а также с платой 39 управления двигателем мотор-редуктора 40 и датчиком 41 температуры.
В целом управление работой ОПУ скомпоновано в общую электронную блок-схему с обратной связью, в которой контроллеры содержат несколько процессоров, отслеживающих поворот платформы 2 по азимутальному углу места автоматически.
На обоих модулях 1 и 3 смонтированы разъемы 59 для подключения кабеля питания с напряжением 24-27 в, а управление от системы верхнего уровня осуществляется по промышленному интерфейсу RS-485.
Опорно-поворотное устройство работает следующим образом.
После подачи электропитания на оба модуля 1 и 3 подключается и управление от системы верхнего уровня (не показана). По промышленному интерфейсу RS-485 поступает команда входа на компьютеры печатных плат 28 и 38: на какой угол надо повернуть платформу 2 с объектом пространственного наблюдения. Контроллеры плат 28 и 38 азимута и угла места включают через платы управления 29 и 39 двигатели мотор-редукторов 12 и 40 на время, соответствующее необходимо углу поворота платформы 2 как по азимуту, так и по углу места.
При этом шестерня 13 мотор-редуктора 12 вращает ведущее колесо 14 блока 15 зубчатых колес, верхнее колесо 16 которого, контактируя с коронным венцом 17, поворачивает по азимуту внешний подвижный корпус 5 с платформой 2. Причем абсолютный шифратор 24 азимута позволяет с высокой точностью определить угол, на который повернут ОПУ в настоящий момент, а многооборотный резистор 32 контролирует и повышает надежность измерения угла поворота платформы 2 по азимуту путем дублирования с абсолютного шифратора 24. Движение ОПУ по азимуту совершается в пределах 360°, и, чтобы защитить кабели, закрепленные на корпусе (на фиг. не показаны) от повреждения, крайний выключатель 22 с маркером 51 ограничивает возможность предельного поворота подвижного внешнего корпуса 5 относительно неподвижного корпуса 6.
Аналогичным образом работает и модуль 3 качания платформы 2 по вертикали, то есть по углу места. Поступивший извне по интерфейсу RS-485 код поворота платформы по углу места на контроллер печатной платы 38 включает через плату 39 управления двигатель мотор-редуктора 40, поворачивая зубчатую шестерню 44, которая в свою очередь вращает зубчатое колесо 45, резьбовой вал 46, которого входит в резьбовую полость 48 штока 47, преобразуя вращательное движение мотор-редуктора 40 в возвратно-поступательное прямолинейное движение упомянутого штока.
Поскольку модуль 3 установлен подвижно на кронштейне 60 корпуса 5 модуля 1, то кинематически связанный с платформой 2 шток 47, смещаясь относительно своего корпуса 33, поворачивает ее по углу места в пределах 30°. Предельные перемещения штока 47 предохраняют от поломки модуля 3 конечные выключатели 42. Как и в модуле 1, в модуле 3 абсолютный шифратор 49 и многооборотный резистор 50 обеспечивают высокую точность качания платформы 2 по углу места. Наличие на корпусах мотор-редукторов 12 и 40 нагревательных элементов 15 в виде нихромовой проволоки 54 или нагревательной электропроводной пленки 55 позволяет обеспечить работоспособность ОПУ при критически низких температурах ниже минус 30°С. При достижении окружающей средой температуры минус 30°С сигналы от датчиков 30 и 41 температуры поступают на контроллеры 28 и 38, которые включают нагревательные элементы 15, обеспечивая рабочее функционирование вышеназванных мотор-редукторов, не допуская замерзания смазывающих средств их механизмов.
Ввиду того, что ОПУ, благодаря своей компоновке, имеют плоские дно и крышку, предлагаемые устройства могут быть размещены по вертикали в комплект, устанавливая их друг на друга для проведения наблюдения за несколькими объектами одновременно.
За счет удачной автономной компоновки ОПУ появляется возможность разместить внутри его конструкций модулей абсолютные шифраторы, многооборотные резисторы и печатные платы управления с обратной связью, что позволяет очень точно контролировать углы поворота платформы 2 по азимуту и углу места в автоматическом режиме.
Источники информации
1. Патент РФ №2134003, H01Q 3/08, опубл. 27.07.1999 г.
2. Патент РФ №2387057, H01Q 3/08, опубл. 20.04.2010 г.
3. Патент РФ №2327264, H01Q 3/08, опубл. 20.06.1999 г.
4. Патент РФ №2255395, H01Q 3/08, опубл. 27.06.2005 г.
5. Патент РФ №2020666, H01Q 3/08, опубл. 30.09.1994 г.
6. Патент РФ №2209495, H01Q 3/08, опубл. 27.07.2003 г.
7. Патент РФ №2359372, H01Q 3/08, опубл. 20.06.2009 г.
8. Патент РФ №2209496, H01Q 3/08, опубл. 27.07.1999 г.
9. Авторское свидетельство СССР №314468, H01Q 3/08, опубл. 01.01.71 г.
10. Авторское свидетельство СССР №303930, H01Q 3/08, опубл. 01.01.71 г.
11. Патент США №4647936, H01Q 1/08, опубл. 03.03.1987 г.
12. Заявка WO 2006042325. H01Q 1/12, опубл. 20.04.2006 г.
13. Патент US №5966991, H01Q 3/12, опубл. 19.10.1999 г.
14. Патент DE №3664526, H01Q 3/08, опубл. 24.08.1989 г.
15. Патент ЕР №0056550, H01Q 3/08, опубл. 11.08.1982 г.
16. Патент US №4691207, H01Q 3/08, опубл. 01.09.1987 г.
Способ имитационной калибровки измерительных каналов системы управления разгрузочно-загрузочной машины ядерного реактора
Способ балансировки рабочего колеса гидравлической турбины
Крановые тензорезисторные весы
Система мониторинга протечек бассейна выдержки атомной электростанции
Способ автоматического контроля снимаемой альфа-загрязненности твэлов и устройство для его осуществления
Способ измерения концентрации гелия в тепловыделяющем элементе
Устройство считывания кода ампул оят
Способ статической балансировки рабочего колеса гидравлической турбины
Способ определения координат протечек бассейна выдержки аэс с ярко выраженной акустической сигнатурой и робототехнический комплекс для его осуществления
Способ контроля вертикальности штабеля контейнеров с радиоактивными отходами
Способ имитационной калибровки измерительных каналов системы управления разгрузочно-загрузочной машины ядерного реактора
Способ балансировки рабочего колеса гидравлической турбины
Крановые тензорезисторные весы
Система мониторинга протечек бассейна выдержки атомной электростанции
Способ автоматического контроля снимаемой альфа-загрязненности твэлов и устройство для его осуществления
Способ измерения концентрации гелия в тепловыделяющем элементе
Устройство считывания кода ампул оят
Способ статической балансировки рабочего колеса гидравлической турбины
Способ статической балансировки рабочего колеса гидравлической турбины
Способ определения координат протечек бассейна выдержки аэс с ярко выраженной акустической сигнатурой и робототехнический комплекс для его осуществления

