Результат интеллектуальной деятельности: УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПО МАРШРУТУ И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПО МАРШРУТУ
Вид РИД
Изобретение
ИЗМЕНЕННОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
2420-546399RU/085
УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПО МАРШРУТУ И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПО МАРШРУТУ
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству управления движением по маршруту и к способу управления движением по маршруту.
Уровень техники
[0002] Известны навигационные устройства для указания маршрутов движения в пункты назначения. Патентный документ 1 раскрывает навигационное устройство, которое, когда имеется точка разветвления на маршруте движения, указывает расстояние до точки разветвления и направляет рассматриваемое транспортное средство в полосу движения для движения при приближении к точке разветвления.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация заявки на патент (Япония) номер 2009-133801
Сущность изобретения
Техническая задача
[0004] Согласно навигационному устройству, раскрытому в патентном документе 1, водитель может распознавать полосу движения для движения при приближении к точке разветвления, но путается касательно того, в какой точке надлежит сменять полосу движения. Точка управления движением для инструктирования водителю сменять полосу движения может быть предварительно установлена; тем не менее, точное управление движением не может предоставляться водителю, если позиция рассматриваемого транспортного средства не оценивается корректно.
[0005] Настоящее изобретение осуществлено с учетом традиционных проблем. Задача настоящего изобретения заключается в том, чтобы предоставлять устройство управления движением по маршруту и способ управления движением по маршруту, допускающие направление рассматриваемого транспортного средства в надлежащую полосу движения для движения, даже когда позиция рассматриваемого транспортного средства является неопределенной.
Решение задачи
[0006] Устройство управления движением по маршруту согласно аспекту настоящего изобретения оценивает позицию рассматриваемого транспортного средства и полосы движения, определяет точность оцененной позиции рассматриваемого транспортного средства, и когда определяется то, что упомянутая определенная точность полосы движения составляет предварительно определенное пороговое значение или меньше, направляет рассматриваемое транспортное средство таким образом, чтобы изменять полосу движения к маршруту движения в точке до того, как расстояние от позиции рассматриваемого транспортного средства до точки разветвления достигает предварительно определенного расстояния. Когда устройство управления движением по маршруту определяет то, что точность полосы движения рассматриваемого транспортного средства составляет предварительно определенное пороговое значение или меньше, устройство управления движением по маршруту направляет рассматриваемое транспортное средство таким образом, чтобы изменять полосу движения на крайнюю правую полосу движения или крайнюю левую полосу движения.
Преимущества изобретения
[0007] Настоящее изобретение может направлять рассматриваемое транспортное средство в надлежащую полосу движения для движения, даже когда позиция рассматриваемого транспортного средства является неопределенной.
Краткое описание чертежей
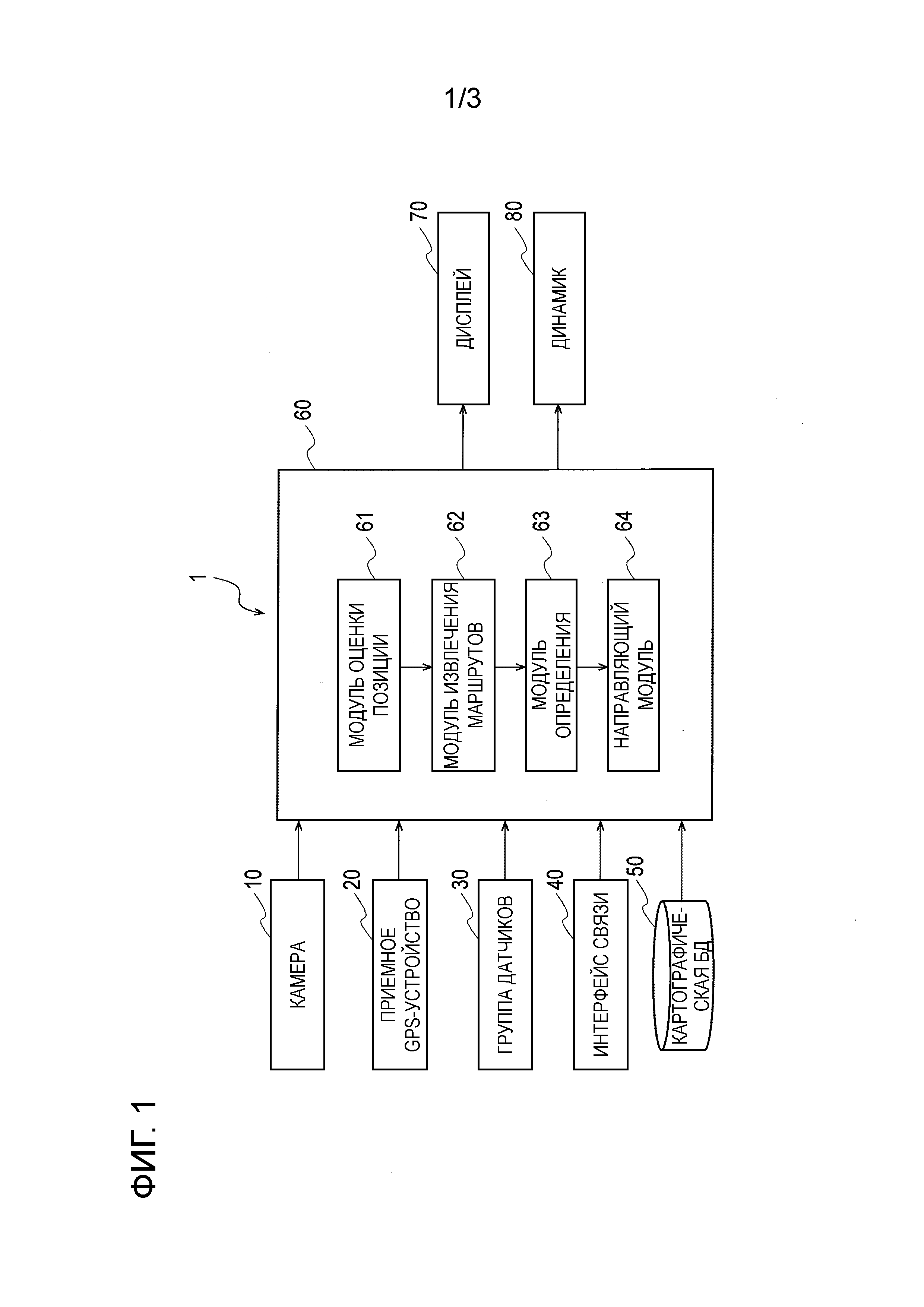
[0008] Фиг. 1 является схемой конфигурации устройства управления движением по маршруту согласно варианту осуществления настоящего изобретения.
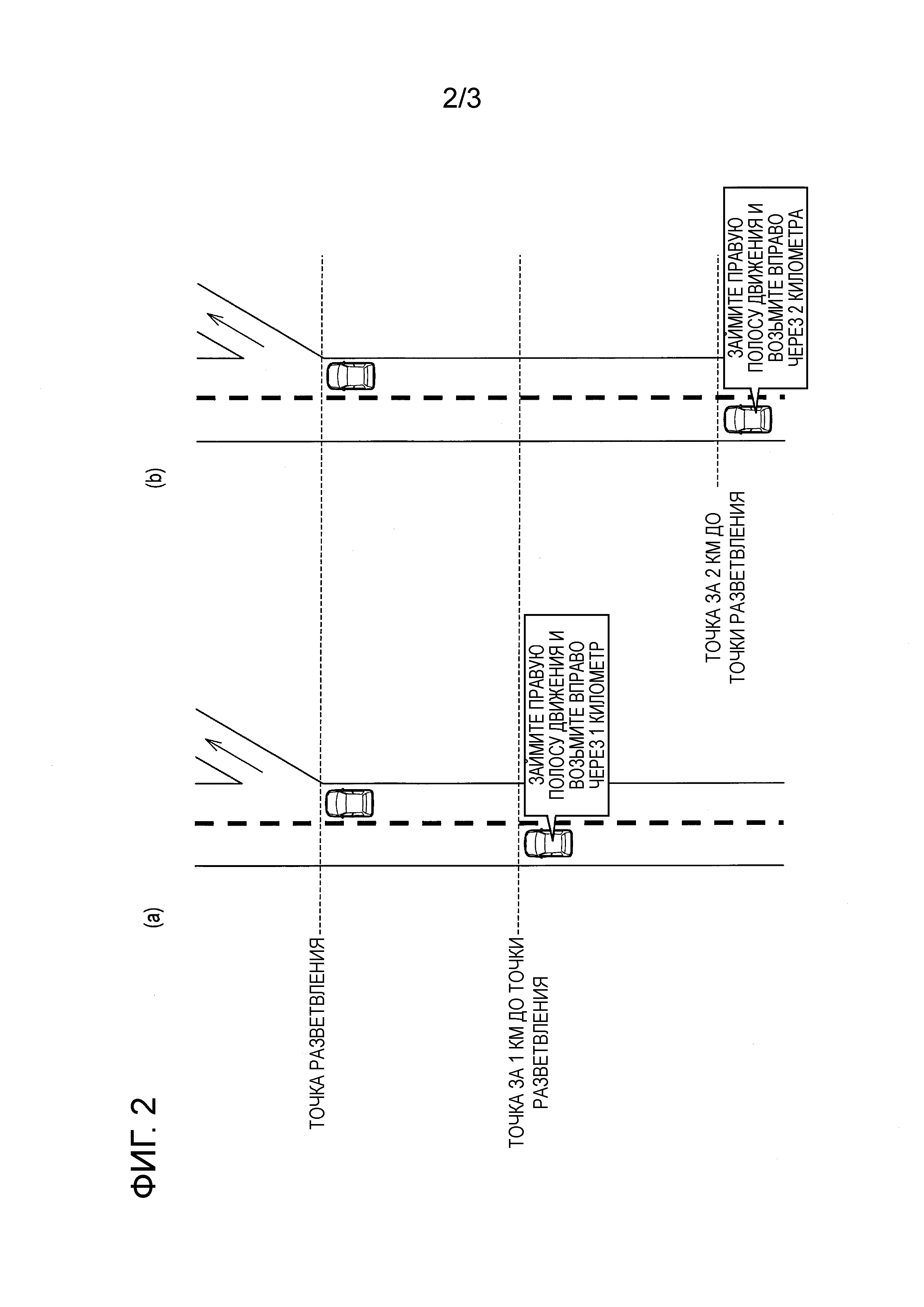
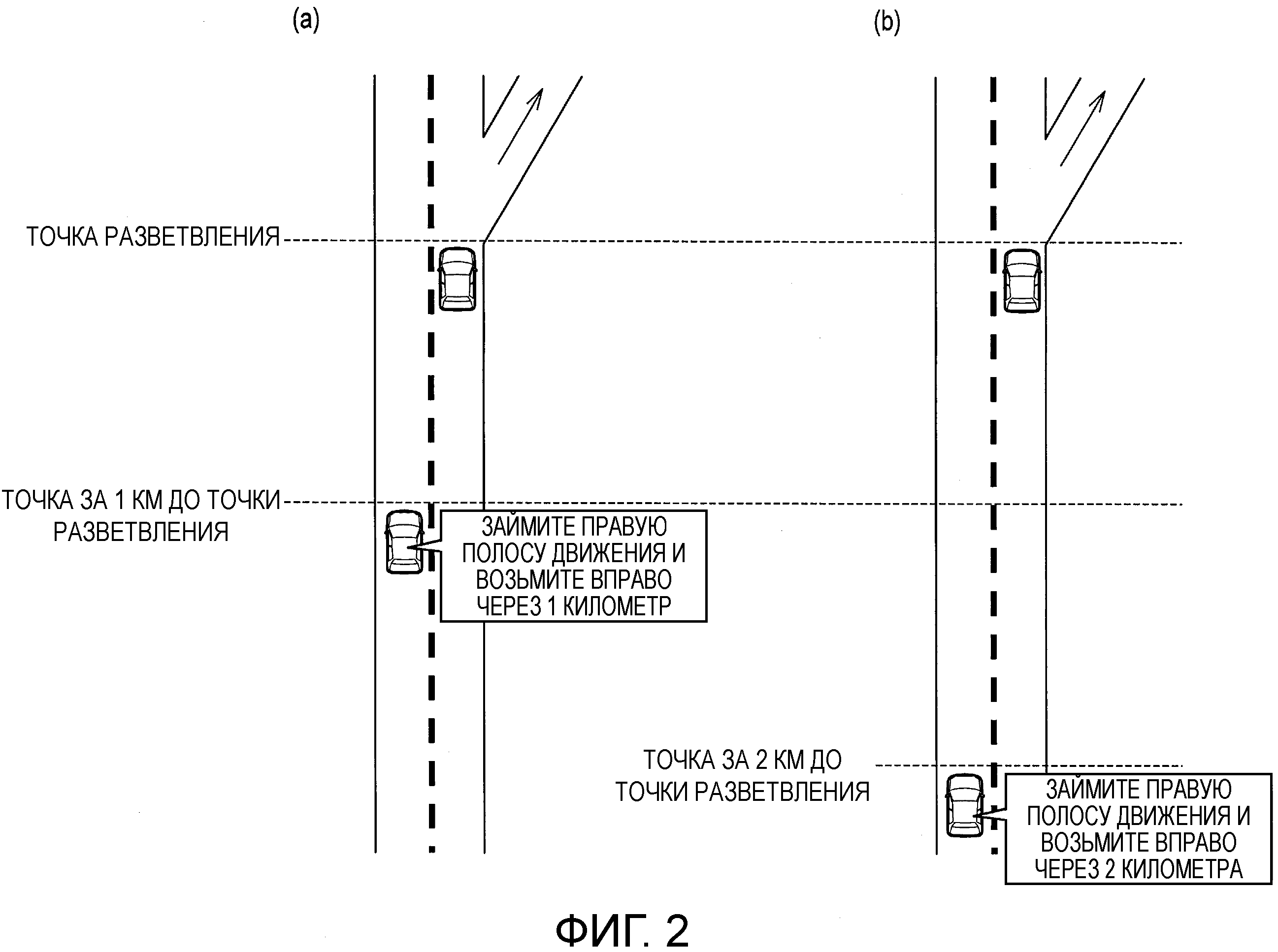
Фиг. 2(a) и фиг. 2(b) являются видами для иллюстрации операций устройства управления движением по маршруту согласно варианту осуществления настоящего изобретения.
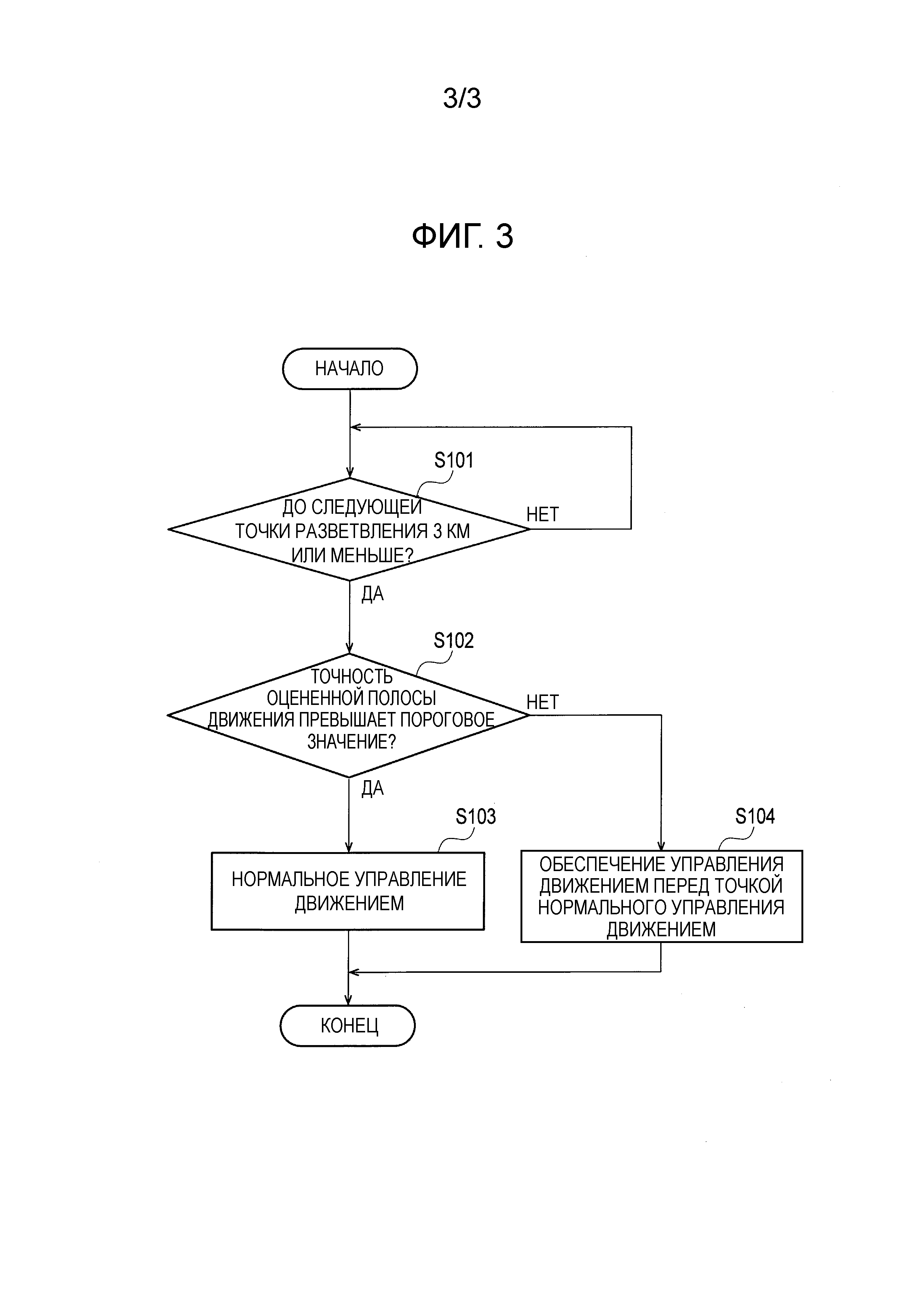
Фиг. 3 является блок-схемой последовательности операций способа для иллюстрации операции устройства управления движением по маршруту согласно варианту осуществления настоящего изобретения.
Подробное описание вариантов осуществления
[0009] Ниже описывается вариант осуществления настоящего изобретения со ссылкой на чертежи. Идентичные элементы в описаниях чертежей обозначаются посредством идентичных ссылок с номерами, и их пояснения не повторяются ниже.
[0010] Ниже описывается устройство 1 управления движением по маршруту согласно настоящему варианту осуществления со ссылкой на фиг. 1. Как показано на фиг. 1, устройство 1 управления движением по маршруту включает в себя камеру 10, приемное GPS-устройство 20, группу датчиков 30, интерфейс 40 связи, картографическую базу 50 данных, навигационное устройство 60, дисплей 70, который предоставляет пассажиру транспортного средства различные фрагменты информации, и динамик 80, который выводит речевые звуки, чтобы информировать пассажира в отношении информации.
[0011] Камера 10 (модуль обнаружения) представляет собой камеру, включающую в себя устройство формирования изображений, такое как прибор с зарядовой связью (CCD) и комплементарная структура "металл-оксид-полупроводник" (CMOS), и формирует изображения видов впереди рассматриваемого транспортного средства. Камера 10 имеет функцию обработки изображений и обнаруживает сигнальные линии дорожной разметки и объекты на земле (к примеру, обочины дороги, тротуары и дорожные знаки) из захваченных изображений. Камера 10 выводит обнаруженные данные в навигационное устройство 60. Камера 10 может устанавливаться в позиции, в которой могут захватываться периферийные виды, вместо видов спереди.
[0012] Приемное GPS-устройство 20 (модуль обнаружения) принимает радиоволны из спутника таким образом, чтобы обнаруживать текущую позицию рассматриваемого транспортного средства на земле. Приемное GPS-устройство 20 выводит обнаруженную текущую позицию рассматриваемого транспортного средства в навигационное устройство 60.
[0013] Группа датчиков 30 включает в себя датчик скорости, датчик ускорения и гиродатчик. Группа датчиков 30 обнаруживает скорость, темп ускорения и ориентацию рассматриваемого транспортного средства посредством надлежащих датчиков и выводит обнаруженные данные в навигационное устройство 60.
[0014] Интерфейс 40 связи представляет собой устройство связи, которое обменивается в беспроводном режиме сигналами с внешними устройствами. Интерфейс 40 связи внешне принимает различные фрагменты информации, к примеру, информацию дорожного движения, включающую в себя затор в движении и ограничения движения, и информацию о погоде, через интеллектуальную транспортную систему (ITS), которая передает различные данные в реальном времени. ITS включает в себя систему автомобильной информации и связи (VICS: зарегистрированная торговая марка) и телематику. Интерфейс 40 связи выводит принимаемую информацию в навигационное устройство 60.
[0015] Картографическая база 50 данных сохраняет картографическую информацию, включающую в себя информацию дороги и информацию инфраструктурных объектов. Картографическая база 50 данных сохраняет различные виды данных, требуемых для управления движением, таких как данные дорог и данные значков, указываемые на карте. Данные дорог, сохраненные в картографической базе 50 данных, включают в себя информацию относительно числа полос движения дорог, ширин дорог, неровностей дорог и т.п.
[0016] Навигационное устройство 60 определяет маршрут движения в пункт назначения, предварительно заданный пассажиром. В частности, навигационное устройство 60 указывает маршрут движения в пункт назначения на дисплее 70 либо метку, обозначающую текущую позицию рассматриваемого транспортного средства, извлеченную посредством использования позиционной информации, полученной из приемного GPS-устройства 20, информации, полученной из интерфейса 40 связи, картографической информации, полученной из картографической базы 50 данных, и т.п.
[0017] Навигационное устройство 60 представляет собой компьютер, включающий в себя CPU, ROM и RAM и тракт передачи данных и интерфейс ввода-вывода, соединяющий эти элементы. CPU реализует предварительно определенную обработку в соответствии с программами, сохраненными в ROM. Навигационное устройство 60 функционально включает в себя модуль 61 оценки позиции, модуль 62 извлечения маршрутов, модуль 63 определения точности и направляющий модуль 64.
[0018] Модуль 61 оценки позиции оценивает текущую позицию рассматриваемого транспортного средства в расчете на полосу движения. В частности, модуль 61 оценки позиции оценивает текущую позицию рассматриваемого транспортного средства в расчете на полосу движения посредством использования информации относительно сигнальных линий дорожной разметки, полученной из камеры 10, позиционной информации, полученной из приемного GPS-устройства 20, и картографической информации, полученной из картографической базы 50 данных.
[0019] Модуль 62 извлечения маршрутов извлекает в расчете на полосу движения маршрут движения в пункт назначения, начинающийся с текущей позиции рассматриваемого транспортного средства, оцененной посредством модуля 61 оценки позиции посредством использования картографической информации, сохраненной в картографической базе 50 данных. Модуль 62 извлечения маршрутов может извлекать маршрут движения в расчете на полосу движения с регулярными интервалами, поскольку нагрузка по извлечению увеличивается, когда маршрут движения в пункт назначения извлекается в расчете на полосу движения постоянно. Например, модуль извлечения 62 может извлекать маршрут движения в расчете на полосу движения, когда расстояние до точки разветвления или перекрестка достигает трех километров. Расстояние не ограничено тремя километрами и может быть любым расстоянием, достаточным для рассматриваемого транспортного средства, чтобы сменять полосу движения заблаговременно. Альтернативно, модуль извлечения 62 может извлекать маршрут движения в расчете на полосу движения на километр. Расстояние не ограничено одним километром, когда нагрузка по извлечению может уменьшаться.
[0020] Модуль 63 определения точности определяет точность (вероятность или достоверность) полосы движения рассматриваемого транспортного средства, оцененной посредством модуля 61 оценки позиции. При использовании в данном документе, фраза "точность (вероятность или достоверность) оцененной полосы движения" является степенью точности оценки полосы движения. Модуль 63 определения точности определяет то, превышает или нет степень точности оцененной полосы движения пороговое значение. Степень точности оцененной полосы движения, превышающая пороговое значение, означает то, что оценка полосы движения рассматриваемого транспортного средства является точной. Степень точности оцененной полосы движения, меньшая или равная пороговому значению, означает то, что полоса движения рассматриваемого транспортного средства является неопределенной. Ниже подробно описывается способ определения.
[0021] Модуль 63 определения точности определяет точность оцененной полосы движения в зависимости от оттенка линий дорожной разметки, полученных из камеры 10. Модуль 63 определения точности определяет то, что точность оцененной полосы движения является низкой, когда оттенок линий дорожной разметки светлее нормального уровня, поскольку имеется вероятность того, что неправильные объекты обнаружены посредством камеры 10 в качестве сигнальных линий дорожной разметки. Модуль 63 определения точности может определять то, светлее или нет оттенок линий дорожной разметки нормального уровня, посредством сопоставления с шаблонами.
[0022] Модуль 63 определения точности также определяет то, что точность оцененной полосы движения является низкой, когда линия дорожной разметки не захватывается в изображении, снятом камерой. Когда имеются другие транспортные средства с обеих сторон рассматриваемого транспортного средства вследствие затора в движении, например, линии дорожной разметки не могут захватываться в изображении, снятом камерой, поскольку линии дорожной разметки скрываются посредством других транспортных средств. Модуль 63 определения точности за счет этого определяет то, что точность оцененной полосы движения является низкой, в таких ситуациях.
[0023] Модуль 63 определения точности также определяет то, что точность оцененной полосы движения является низкой, когда рассматриваемое транспортное средство едет против солнца, поскольку камера 10 не может формировать изображения объектов надлежащим образом вследствие света, падающего с обратной стороны.
[0024] Модуль 63 определения точности также определяет то, что точность оцененной полосы движения является низкой, когда распознавание посредством камеры 10 отличается от распознавания посредством навигационного устройства 60. Например, в то время как навигационное устройство 60 распознает, что рассматриваемое транспортное средство движется по четырехполосной дороге, камера 10 может распознавать то, что рассматриваемое транспортное средство движется по пятиполосной дороге. Когда обочина дороги является небольшой, и тротуар является широким, камера 10 может распознавать тротуар в качестве одной из полос движения дороги. Модуль 63 определения точности за счет этого определяет то, что точность оцененной полосы движения является низкой, когда имеется отличие распознавания между камерой 10 и навигационным устройством 60.
[0025] Модуль 63 определения точности определяет точность оцененной полосы движения в зависимости от скорректированных значений при позиционной коррекции посредством использования объектов на земле. В частности, модуль 61 оценки позиции может корректировать текущую позицию рассматриваемого транспортного средства посредством использования объектов на земле. Модуль 61 оценки позиции вычисляет расстояние до объекта на земле, такого как дорожный знак или информационный указатель, и корректирует текущую позицию в направлении движения с помощью вычисленного расстояния. Когда скорректированное значение превышает нормальное значение, модуль 63 определения точности определяет то, что точность оцененной полосы движения является низкой.
[0026] Как описано выше, модуль 63 определения точности определяет то, превышает или нет степень точности оцененной полосы движения пороговое значение. Пороговое значение, используемое для определения, может получаться через предварительные эксперименты или моделирования. Пороговое значение может варьироваться в зависимости от ситуаций при движении (таких как скоростная автомагистраль и местная дорога).
[0027] Направляющий модуль 64 обеспечивает управление движением для движения в точке разветвления или на перекрестке на маршруте движения. Например, направляющий модуль 64 направляет рассматриваемое транспортное средство в надлежащую полосу движения в точке разветвления, в которой дорога разветвляется на два направления, или направляет рассматриваемое транспортное средство таким образом, что оно едет прямо, поворачивает налево или поворачивает направо на перекрестке.
[0028] Дисплей 70 указывает маршрут движения в пункт назначения, заданный посредством навигационного устройства 60.
[0029] Динамик 80 выводит речевые звуки, чтобы информировать пассажира в отношении направления в пункт назначения по маршруту движения или направления в точке разветвления или на перекрестке.
[0030] Далее описываются примеры операций устройства 1 управления движением по маршруту, сконфигурированного так, как описано выше, со ссылкой на фиг. 2(a) и фиг. 2(b). Фиг. 2(a) и фиг. 2(b) проиллюстрированы для случая, в котором полоса движения дороги, разветвляющейся в направлении вправо, задается в качестве маршрута движения.
[0031] Как показано на фиг. 2(a), когда рассматриваемое транспортное средство приближается к точке разветвления, модуль 62 извлечения маршрутов извлекает маршрут движения в расчете на полосу движения. Модуль 63 определения точности определяет то, превышает или нет степень точности оцененной полосы движения пороговое значение. Когда степень точности оцененной полосы движения превышает пороговое значение, и расстояние от текущей позиции до точки разветвления достигает предварительно определенного расстояния (например, один километр), направляющий модуль 64 информирует водителя "Займите правую полосу движения и возьмите вправо через один километр", как показано на фиг. 2(a). Настоящий вариант осуществления примерно иллюстрирует случай, в качестве нормального управления движением, в котором смена полосы движения информируется, когда расстояние от текущей позиции до точки разветвления достигает одного километра. Хотя настоящий вариант осуществления примерно иллюстрирует случай, в котором предварительно определенное расстояние составляет один километр, предварительно определенное расстояние не ограничено одним километром и может быть любым расстоянием, которое является достаточным для водителя, чтобы безопасно сменять полосу движения.
[0032] Когда степень точности оцененной полосы движения меньше или равна пороговому значению, направляющий модуль 64 направляет рассматриваемое транспортное средство таким образом, что оно сменяет полосу движения в более ранней точке, чем точка, в которой предоставляется нормальное управление движением, как проиллюстрировано на фиг. 2(a). Когда степень точности оцененной полосы движения меньше или равна пороговому значению, и расстояние от текущей позиции до точки разветвления достигает расстояния, большего одного километра, используемого при нормальном управлении движением, как проиллюстрировано на фиг. 2(a) (в этом примере, два километра), направляющий модуль 64 информирует водителя "Займите правую полосу движения и возьмите вправо через два километра", как показано на фиг. 2(b). Направляющий модуль 64 направляет рассматриваемое транспортное средство таким образом, что оно сменяет полосу движения в более ранней точке, чем точка нормального управления движением, когда оцененная полоса движения рассматриваемого транспортного средства является неопределенной. Направляющий модуль 64 за счет этого может направлять рассматриваемое транспортное средство в надлежащее направление для движения, даже когда оценка полосы движения рассматриваемого транспортного средства не является точной.
[0033] Хотя настоящий вариант осуществления примерно иллюстрирует случай двухполосной дороги, настоящее изобретение может быть применимым к любому случаю независимо от числа полос движения. Например, в случае если одна из трех или более полос движения дороги, разветвляющейся в направлении вправо, задается в качестве маршрута движения, и степень точности оцененной полосы движения меньше или равна пороговому значению, направляющий модуль 64 информирует водителя "Займите крайнюю правую полосу движения", в более ранней точке, чем точка нормального управления движением независимо от того, по какой полосе движения движется рассматриваемое транспортное средство. Направляющий модуль 64 за счет этого может направлять рассматриваемое транспортное средство в надлежащее направление, независимо от того, по какой полосе движения движется рассматриваемое транспортное средство, даже когда оценка полосы движения рассматриваемого транспортного средства не является точной.
[0034] Направляющий модуль 64 может изменять начальную точку управления движением в зависимости от числа полос движения. Направляющий модуль 64 может информировать рассматриваемое транспортное средство в отношении смены полосы движения в более ранней точке по мере того, как увеличивается число полос движения. Например, когда рассматриваемое транспортное средство движется в крайней левой полосе движения по пятиполосной дороге и должно двигаться в полосе движения, разветвляющейся в направлении вправо в точке разветвления, рассматриваемое транспортное средство должно сменять полосу движения четыре раза. Чтобы обеспечивать возможность водителю сменять полосу движения с достаточным количеством времени, управление движением предпочтительно предоставляется водителю в точке, имеющей достаточное расстояние от текущей позиции до точки разветвления. Направляющий модуль 64 начинает предоставление управления движением в более ранней точке по мере того, как увеличивается число полос движения таким образом, чтобы направлять рассматриваемое транспортное средство в надлежащее направление, чтобы двигаться с достаточным количеством времени, даже когда оценка полосы движения рассматриваемого транспортного средства не является точной. Направляющий модуль 64 за счет этого может снижать риск того, что рассматриваемое транспортное средство пропускает движение в надлежащем направлении.
[0035] Направляющий модуль 64 может направлять рассматриваемое транспортное средство таким образом, что она сменяет текущую полосу движения на крайнюю правую полосу движения или крайнюю левую полосу движения, когда степень точности оцененной полосы движения меньше или равна предварительно определенному пороговому значению времени. Изменение крайней правой полосы движения или крайней левой полосы движения сбрасывает точность оценки полосы движения таким образом, что модуль 63 определения точности может определять точность оцененной полосы движения снова.
[0036] Далее описывается пример операции устройства 1 управления движением по маршруту со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 3. Процесс, показанный на блок-схеме последовательности операций способа, начинается, когда задается маршрут движения в пункт назначения.
[0037] На этапе S101, модуль 62 извлечения маршрутов определяет то, составляет либо нет расстояние от текущей позиции рассматриваемого транспортного средства до следующей точки разветвления три километра или меньше. Когда расстояние до следующей точки разветвления больше трех километров ("Нет" на этапе S101), модуль 62 извлечения маршрутов остается в режиме ожидания. Когда расстояние до следующей точки разветвления составляет три километра или меньше ("Да" на этапе S101), модуль 62 извлечения маршрутов извлекает маршрут движения в расчете на полосу движения.
[0038] На этапе S102, модуль 63 определения точности определяет то, превышает или нет степень точности оцененной полосы движения пороговое значение. Когда степень точности оцененной полосы движения превышает пороговое значение ("Да" на этапе S102), процесс переходит к этапу S103. Когда степень точности оцененной полосы движения меньше или равна пороговому значению ("Нет" на этапе S102), процесс переходит к этапу S104.
[0039] На этапе S103, направляющий модуль 64 предоставляет управление движением в качестве нормального управления движением, когда расстояние от текущей позиции рассматриваемого транспортного средства до следующей точки разветвления достигает одного километра.
[0040] На этапе S104, направляющий модуль 64 предоставляет управление движением до того, как расстояние от текущей позиции рассматриваемого транспортного средства до следующей точки разветвления достигает одного километра.
[0041] Как описано выше, устройство 1 управления движением по маршруту согласно настоящему варианту осуществления позволяет добиваться следующих преимуществ.
[0042] Устройство 1 управления движением по маршруту изменяет начальную точку управления движением в зависимости от точности оценки текущей позиции рассматриваемого транспортного средства. Когда степень точности оцененной текущей позиции превышает пороговое значение, устройство 1 управления движением по маршруту обеспечивает управление движением, когда расстояние от текущей позиции до точки разветвления достигает предварительно определенного расстояния. Когда степень точности оцененной текущей позиции меньше или равна пороговому значению, устройство 1 управления движением по маршруту обеспечивает управление движением до достижения предварительно определенного расстояния. Соответственно, устройство 1 управления движением по маршруту может направлять рассматриваемое транспортное средство в надлежащую полосу движения для движения в точке разветвления или на перекрестке, даже когда оценка текущей позиции рассматриваемого транспортного средства не является точной.
[0043] Устройство 1 управления движением по маршруту обнаруживает полосу движения в качестве текущей позиции рассматриваемого транспортного средства и изменяет начальную точку управления движением в зависимости от точности оценки обнаруженной полосы движения. Соответственно, устройство 1 управления движением по маршруту может направлять рассматриваемое транспортное средство в надлежащую полосу движения для движения в точке разветвления или на перекрестке, даже когда оценка полосы движения рассматриваемого транспортного средства не является точной.
[0044] Устройство 1 управления движением по маршруту направляет рассматриваемое транспортное средство в надлежащую полосу движения для движения в точке разветвления или на перекрестке независимо от того, по какой полосе движения движется рассматриваемое транспортное средство. Соответственно, устройство 1 управления движением по маршруту может направлять рассматриваемое транспортное средство в надлежащую полосу движения для движения в точке разветвления или на перекрестке, даже когда оценка полосы движения рассматриваемого транспортного средства не является точной.
[0045] Устройство 1 управления движением по маршруту направляет рассматриваемое транспортное средство таким образом, что оно сменяет текущую полосу движения на крайнюю правую полосу движения или крайнюю левую полосу движения, когда степень точности оцененной полосы движения составляет предварительно определенное пороговое значение времени или меньше. Соответственно, точность оценки маршрута движения сбрасывается таким образом, что устройство 1 управления движением по маршруту может определять точность оцененной полосы движения снова.
[0046] Хотя выше описан вариант осуществления настоящего изобретения, следует понимать, что настоящее изобретение не имеет намерение быть ограниченным описаниями и чертежами, составляющими часть этого раскрытия сущности. Различные альтернативные варианты осуществления, примеры и технические варианты применения должны становиться очевидными для специалистов в данной области техники согласно этому раскрытию сущности.
[0047] Хотя настоящий вариант осуществления примерно иллюстрирует случай, в котором картографическая база 50 данных сохраняется в устройстве 1 управления движением по маршруту, картографическая база 50 данных может сохраняться на сервере. Когда картографическая база 50 данных сохраняется на сервере, навигационное устройство 60 может получать картографическую информацию по требованию через связь.
[0048] Настоящее изобретение является применимым к автономному транспортному средству, которое управляется в режиме автономного вождения по маршруту движения. Когда настоящее изобретение применяется к автономному транспортному средству, автономное транспортное средство может автономно сменять полосу движения, когда степень точности оцененной полосы движения превышает пороговое значение, и расстояние от текущей позиции до точки разветвления достигает одного километра. Автономное транспортное средство может автономно сменять полосу движения, когда степень точности оцененной полосы движения меньше или равна пороговому значению, и расстояние от текущей позиции до точки разветвления достигает двух километров. Автономное транспортное средство может изменять точку автономной смены полосы движения на более раннюю точку по мере того, как увеличивается число полос движения.
Список номеров ссылок
[0049] 10 - камера
20 - приемное GPS-устройство
63 - модуль определения точности
64 - направляющий модуль
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента

