Результат интеллектуальной деятельности: УСТРОЙСТВО ДИАГНОСТИКИ НЕИСПРАВНОСТЕЙ И СПОСОБ ДИАГНОСТИКИ НЕИСПРАВНОСТЕЙ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству диагностики неисправностей и к способу диагностики неисправностей для выполнения диагностики неисправностей для многоосного робота.
Уровень техники
[0002] Патентный документ 1 раскрыт в качестве традиционного способа диагностики неисправностей для промышленного робота с шарнирными сочленениями. В способе диагностики неисправностей, раскрытом в патентном документе 1, в то время когда робот работает, позиция перемещения каждого вала сочленения робота и возмущающий крутящий момент, прикладываемый к валу сочленения, обнаруживаются с предварительно определенными интервалами, и вычисляется среднее значение возмущающего крутящего момента в каждой обнаруженной позиции перемещения. Затем это среднее значение и предварительно заданное пороговое значение сравниваются, и если среднее значение превышает предварительно заданное пороговое значение, определяется то, что робот подвержен анормальности или неисправности.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация заявки на патент (Япония) номер H 9-174482
Сущность изобретения
[0004] Тем не менее, возмущающий крутящий момент может отличаться в зависимости от содержимого операции, выполняемой посредством робота. Способ, раскрытый в патентном документе 1, может приводить к неправильному решению по диагностике неисправностей, поскольку способ сравнивает предварительно заданное пороговое значение с возмущающим крутящим моментом без учета содержимого операции.
[0005] Настоящее изобретение осуществлено с учетом вышеизложенной проблемы, и его задача заключается в том, чтобы предоставлять устройство диагностики неисправностей и способ диагностики неисправностей, допускающие выполнение точной диагностики неисправностей с учетом содержимого операций, выполняемых посредством робота.
[0006] Устройство диагностики неисправностей и способ диагностики неисправностей согласно аспекту настоящего изобретения группируют возмущающие крутящие моменты, прикладываемые к валам сочленения, включенным в многоосный робот, согласно содержимому операций, выполняемых посредством многоосного робота при определении возмущающих крутящих моментов. Диагностика неисправностей выполняется для многоосного робота посредством сравнения каждого сгруппированного возмущающего крутящего момента с пороговым значением.
Краткое описание чертежей
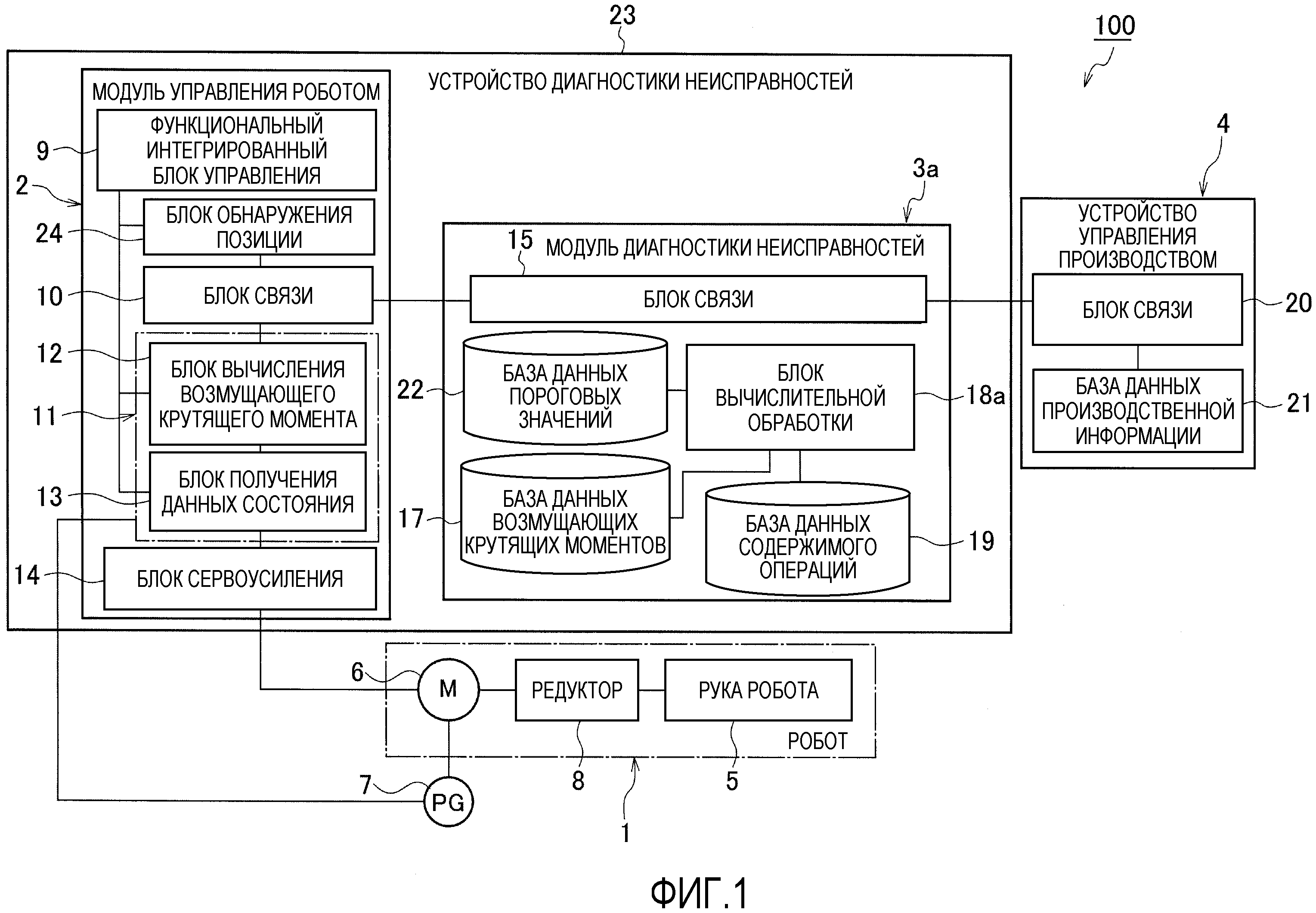
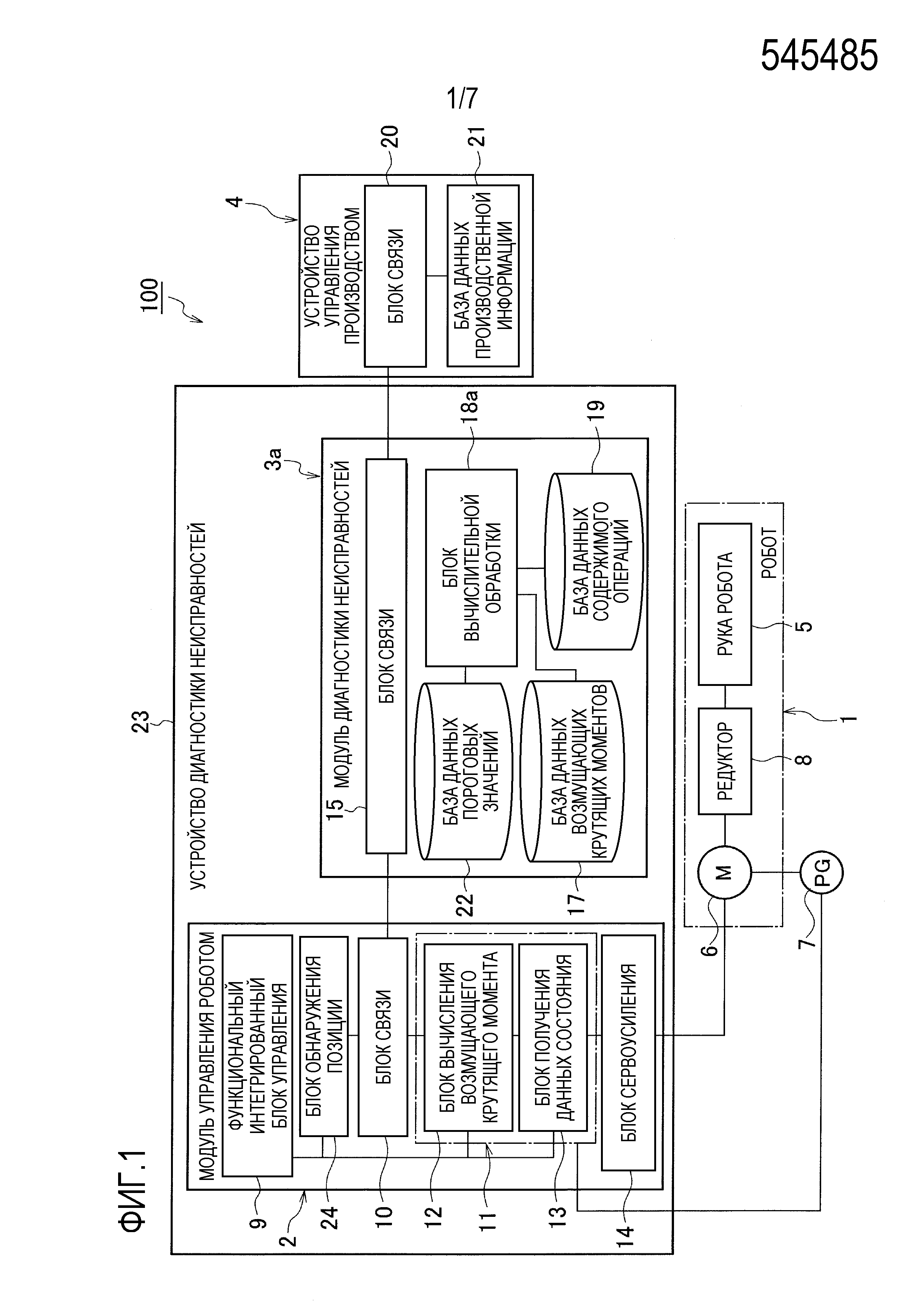
[0007] Фиг. 1 является блок-схемой, иллюстрирующей общую конфигурацию системы 100 диагностики неисправностей, включающей в себя устройство 23 диагностики неисправностей согласно первому варианту осуществления.
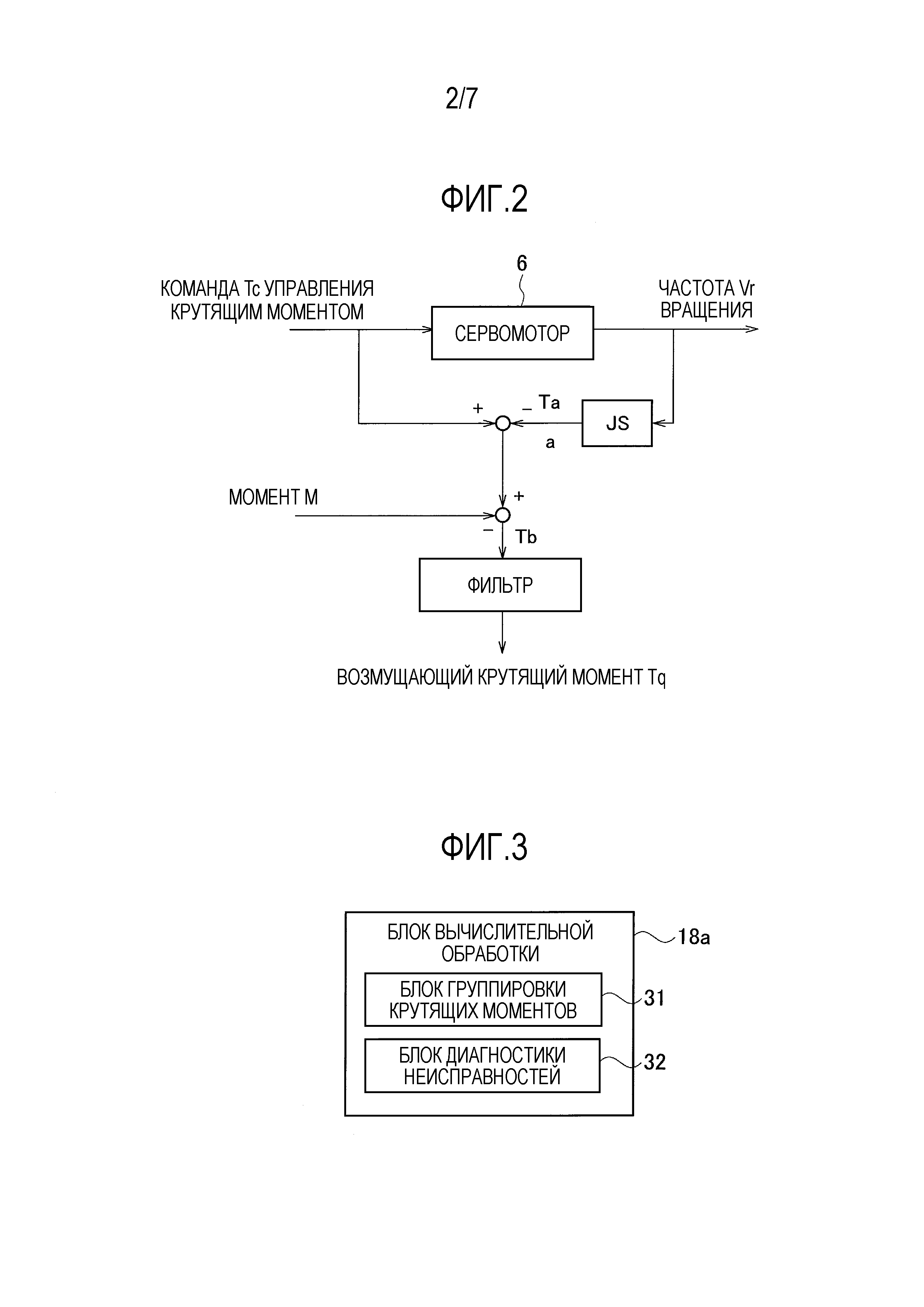
Фиг. 2 является блок-схемой, иллюстрирующей способ вычисления возмущающего крутящего момента (Tq).
Фиг. 3 является блок-схемой, иллюстрирующей конкретную конфигурацию блока 18a вычислительной обработки на фиг. 1.
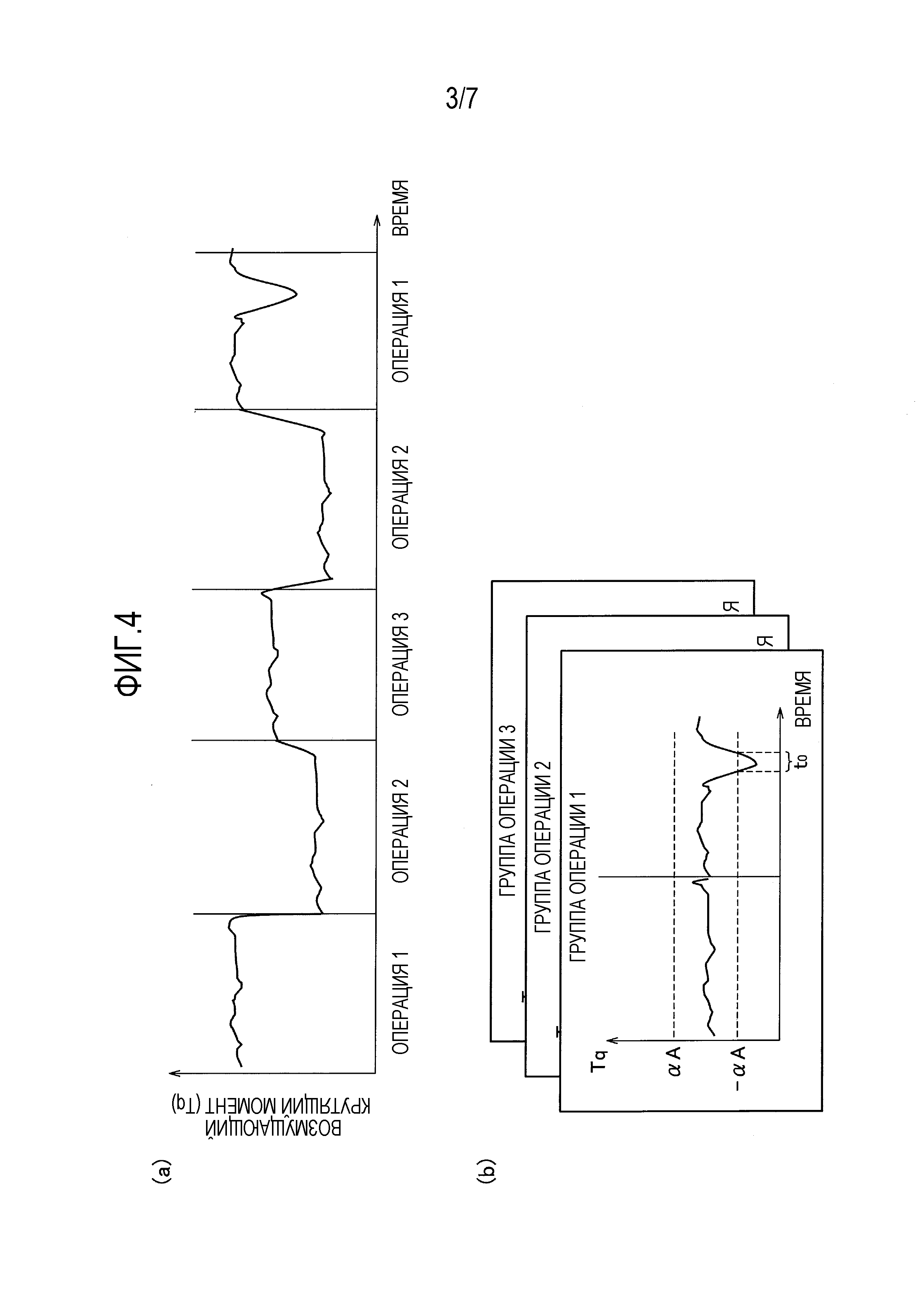
Часть (a) по фиг. 4 является графиком, иллюстрирующим результат определенных возмущающих крутящих моментов (Tq), категоризированных согласно содержимому операций, выполняемых посредством робота 1, и часть (b) по фиг. 4 является видом, иллюстрирующим возмущающие крутящие моменты (Tq), сгруппированные в категоризированные операции.
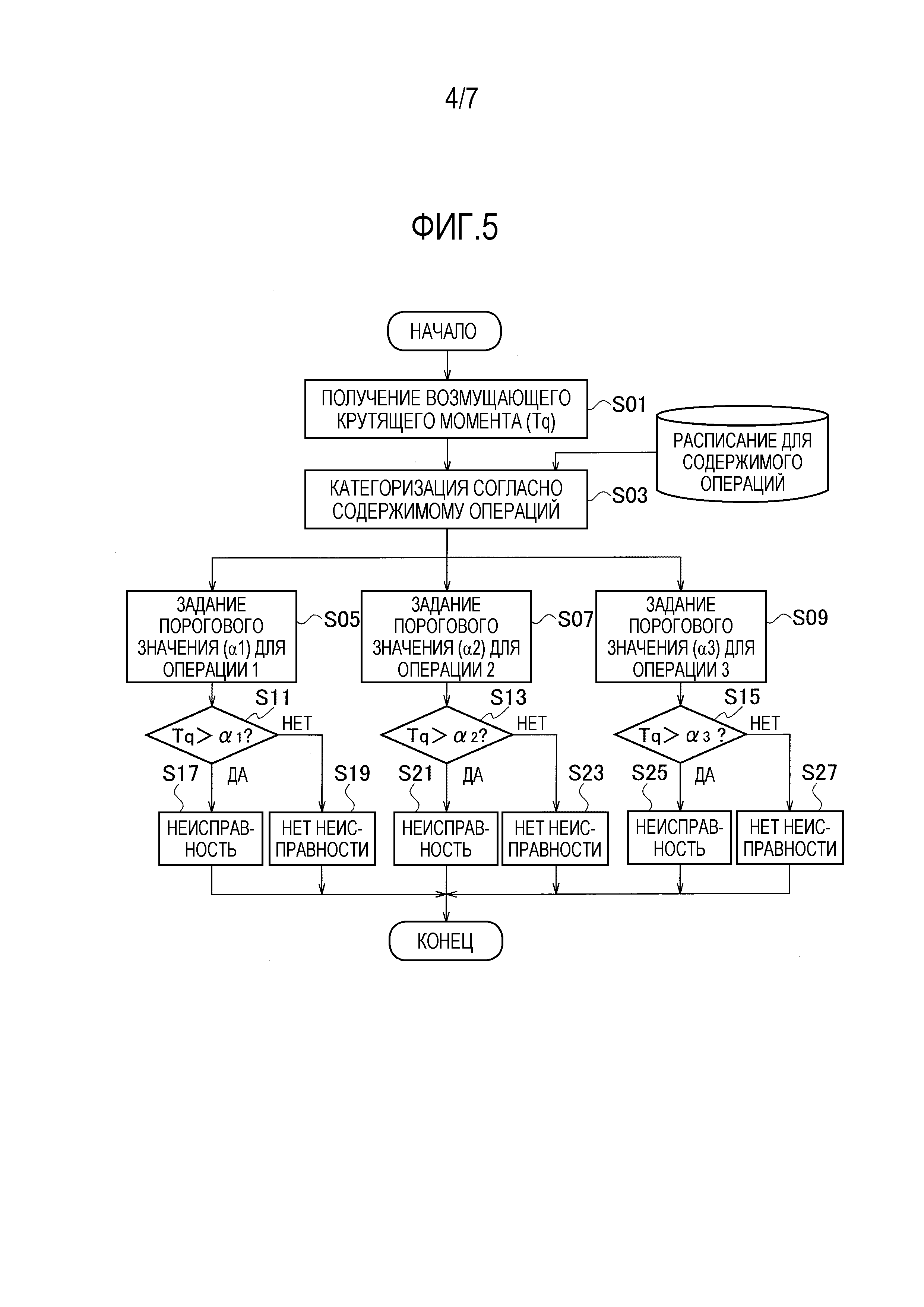
Фиг. 5 является блок-схемой последовательности операций способа, иллюстрирующей способ диагностики неисправностей согласно первому варианту осуществления.
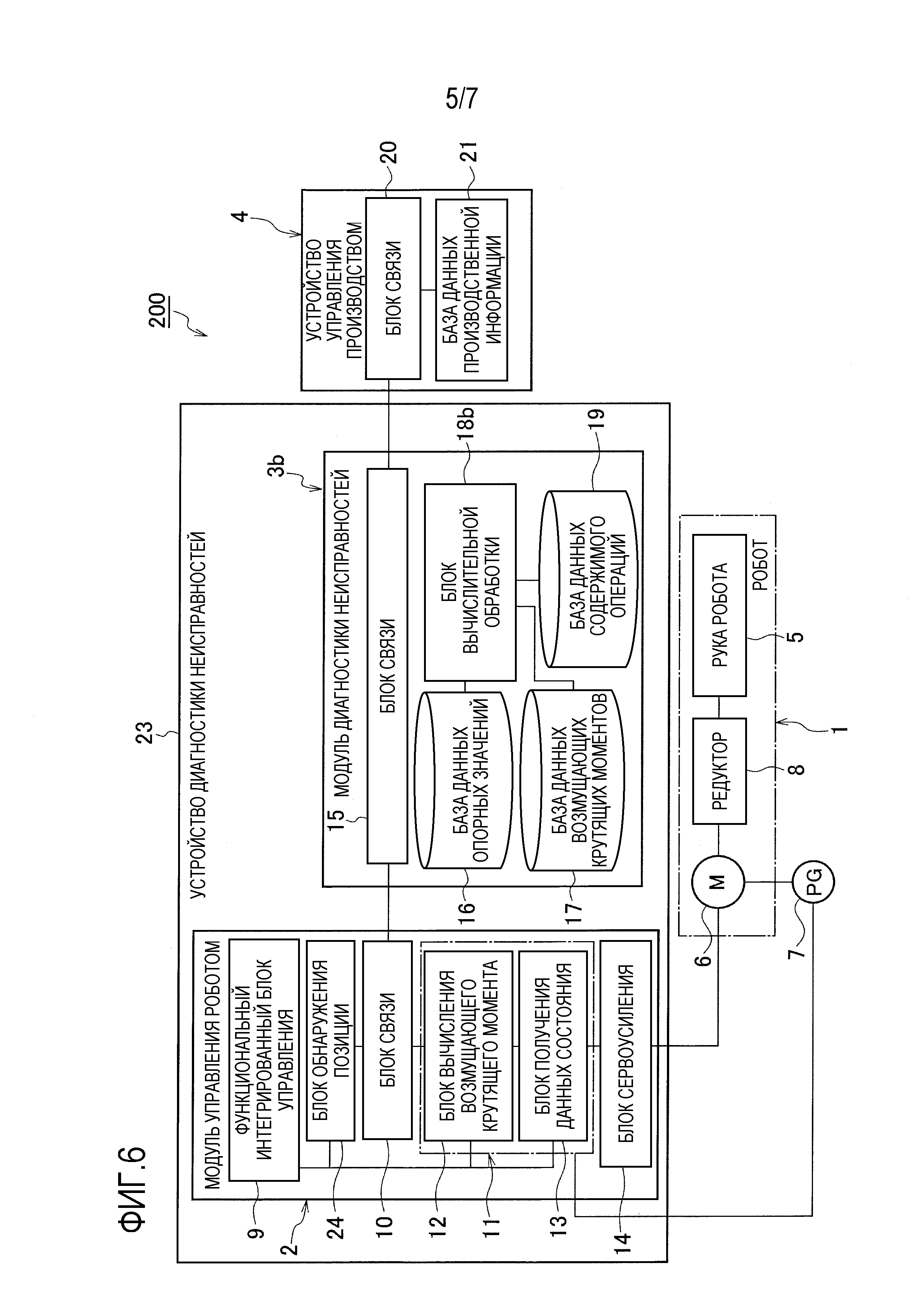
Фиг. 6 является блок-схемой, иллюстрирующей общую конфигурацию системы 200 диагностики неисправностей, включающей в себя устройство 23 диагностики неисправностей согласно второму варианту осуществления.
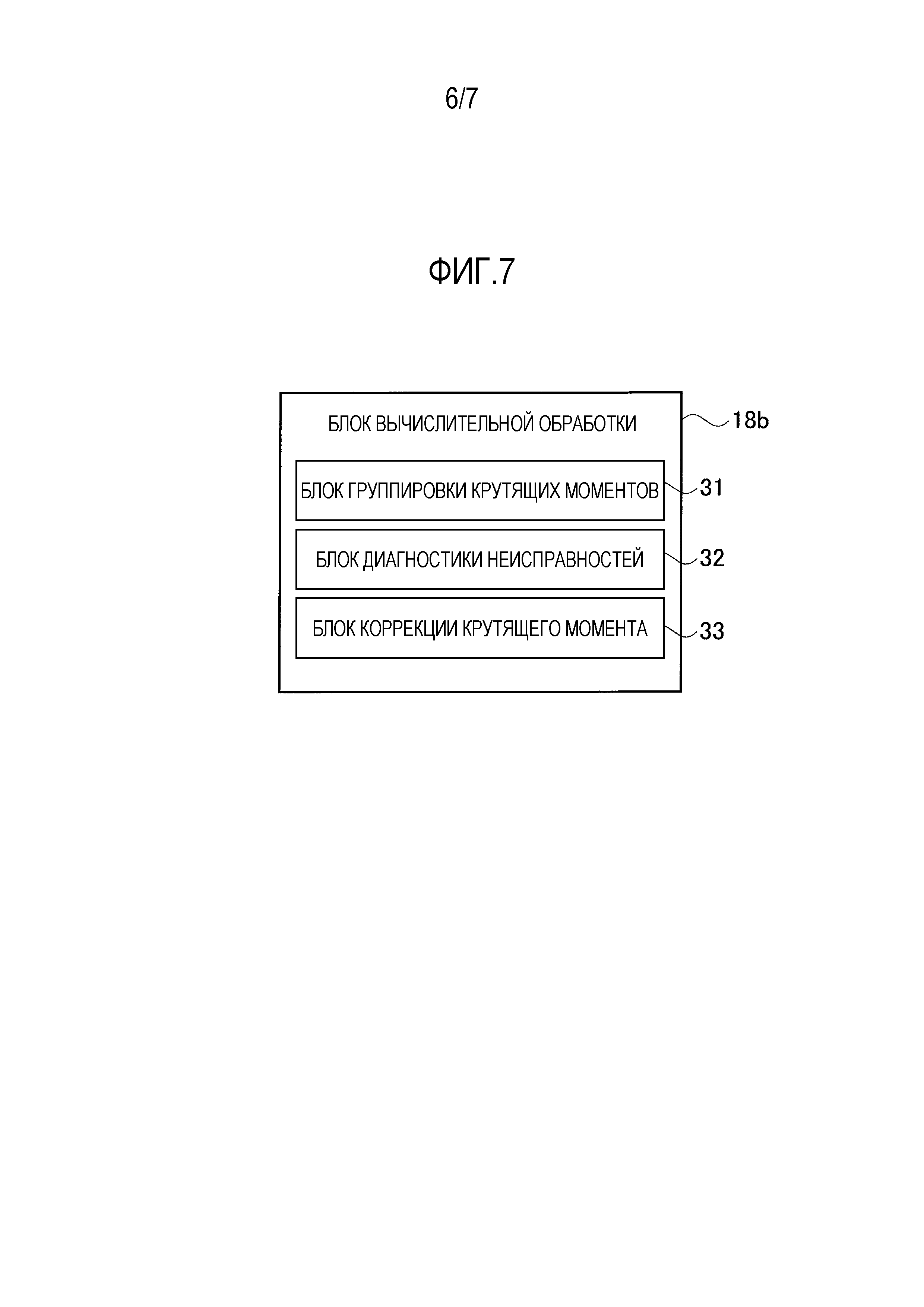
Фиг. 7 является блок-схемой, иллюстрирующей конкретную конфигурацию блока 18b вычислительной обработки на фиг. 6.
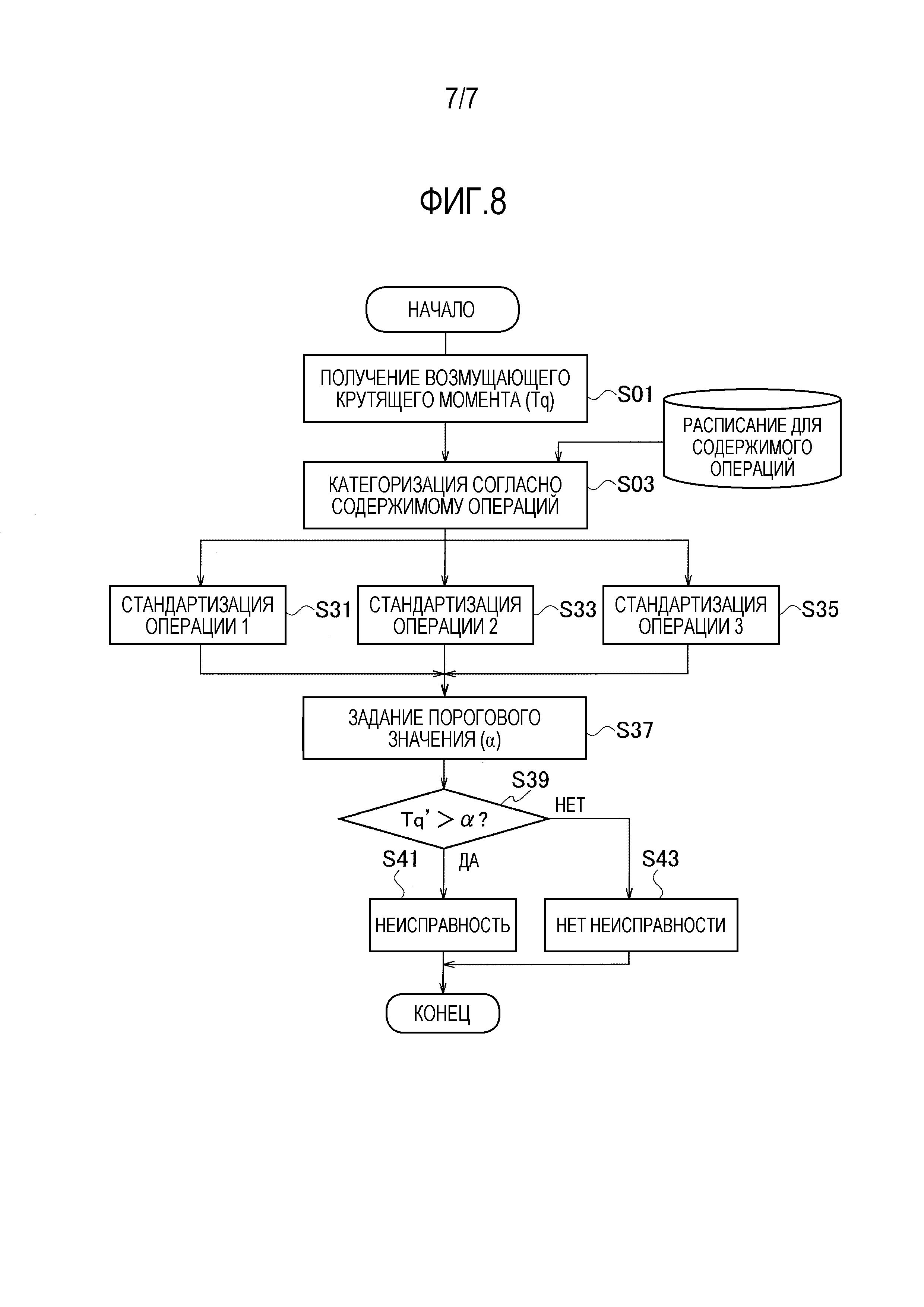
Фиг. 8 является блок-схемой последовательности операций способа, иллюстрирующей способ диагностики неисправностей согласно второму варианту осуществления.
Подробное описание вариантов осуществления
[0008] Ниже подробно описываются некоторые варианты осуществления со ссылкой на чертежи. Идентичные блоки, проиллюстрированные в иллюстрации чертежей, обозначаются посредством идентичных ссылок с номерами, и их описание опускается.
[0009] Первый вариант осуществления
Ниже описывается общая конфигурация системы 100 диагностики неисправностей, включающей в себя устройство 23 диагностики неисправностей согласно первому варианту осуществления, со ссылкой на фиг. 1. Система 100 диагностики неисправностей формируется из робота 1, устройства 23 диагностики неисправностей и устройства 4 управления производством. Устройство 23 диагностики неисправностей включает в себя модуль 2 управления роботом и модуль 3a диагностики неисправностей.
[0010] Робот 1 представляет собой программируемый обучением робот на основе многоосной машины в качестве примера многоосного робота. Робот 1 включает в себя системы моторного привода в качестве валов сочленения, представляющие собой рабочие валы. Рука 5 робота приводится в действие посредством сервомотора 6 (в дальнейшем называемого просто "мотором") через редуктор 8. К мотору 6 присоединяется импульсный кодер 7 (импульсный генератор или датчик позиции), представляющий собой компонент для обнаружения его позиции угла поворота и частоты вращения.
[0011] Модуль 2 управления роботом включает в себя функциональный интегрированный блок 9 управления, блок 24 обнаружения позиции, блок 10 связи, блок 11 сервоуправления (пример блока определения крутящего момента) и блок 14 сервоусиления. Блок 11 сервоуправления приводит в действие мотор 6 через блок 14 сервоусиления при приеме команды из высокоуровневого функционального интегрированного блока 9 управления. Импульсный кодер 7, присоединяемый к мотору 6, формирует контур обратной связи для процесса управления позицией угла поворота и частотой вращения мотора 6 между ним и блоком 11 сервоуправления.
[0012] Блок 11 сервоуправления включает в себя процессор, который выполняет процесс управления позицией угла поворота, частотой вращения и током мотора 6, ROM, которое сохраняет управляющую программу, и энергонезависимое устройство хранения данных, которое сохраняет предварительно заданные значения и различные параметры. Блок 11 сервоуправления также включает в себя RAM, которое временно сохраняет данные в ходе процесса вычисления, регистр, который подсчитывает импульсы обратной связи по позиции из импульсного кодера 7, чтобы обнаруживать абсолютную позицию угла поворота мотора 6 и т.д.
[0013] Блок 11 сервоуправления формирует схему, которая определяет возмущающие крутящие моменты (Tq), прикладываемые к валам сочленения, посредством инструктирования процессору выполнять предварительно установленную компьютерную программу. Блок 11 сервоуправления включает в себя блок 12 вычисления возмущающего крутящего момента и блок 13 получения данных состояния в качестве вышеуказанной схемы.
[0014] Блок 13 получения данных состояния регулярно собирает различные данные по состоянию приведения в действие каждого вала сочленения робота 1 (данные, указывающие позицию угла поворота, частоту вращения и ток). Блок 12 вычисления возмущающего крутящего момента вычисляет возмущающий крутящий момент (Tq) на основе данных, полученных посредством блока 13 получения данных состояния. Данные, указывающие позицию угла поворота, частоту вращения и ток и возмущающий крутящий момент (Tq), выводятся в модуль 3a диагностики неисправностей через блок 10 связи. При этой конфигурации, блок 11 сервоуправления имеет форму того, что называется программным сервомеханизмом. Ниже описываются подробности способа вычисления возмущающего крутящего момента (Tq) со ссылкой на фиг. 2. Возмущающий крутящий момент (Tq) означает разность между значением команды управления крутящим моментом для мотора 6 и крутящим моментом, сформированным посредством мотора 6.
[0015] Следует отметить, что системы моторного привода, аналогичные системе на фиг. 1, требуются в числе, равном числу валов сочленения, включенных в робот 1. Тем не менее, на фиг. 1 проиллюстрирована только система моторного привода для одного вала, и иллюстрация других систем моторного привода опускается. Кроме того, зубчатая передача переключения скорости размещается между мотором 6 и редуктором 8 на фиг. 1 в некоторых случаях.
[0016] Блок 24 обнаружения позиции обнаруживает позицию перемещения вала сочленения, содержащего мотор 6, из абсолютной позиции угла поворота мотора 6, полученной посредством блока 13 получения данных состояния. Данные, указывающие позицию перемещения вала сочленения, обнаруженную посредством блока 24 обнаружения позиции, выводятся в модуль 3a диагностики неисправностей через блок 10 связи в ассоциации с данными, указывающими возмущающий крутящий момент (Tq). Информация относительно позиции перемещения вала сочленения и возмущающего крутящего момента, которые ассоциированы друг с другом, передается в модуль 3a диагностики неисправностей.
[0017] С учетом расположения на более высоком уровне относительно блока 11 сервоуправления и блока 24 обнаружения позиции, функциональный интегрированный блок 9 управления имеет прямое управление работой робота 1. Блок 10 связи обменивается обязательными данными с блоком 15 связи модуля 3a диагностики неисправностей, которая описывается ниже, через LAN и т.п.
[0018] Модуль 3a диагностики неисправностей включает в себя блок 15 связи, базу 22 данных пороговых значений, базу 17 данных возмущающих крутящих моментов, блок 18a вычислительной обработки и базу 19 данных содержимого операций. Блок 15 связи обменивается обязательными данными с блоком 10 связи вышеописанного модуля 2 управления роботом и блоком 20 связи устройства 4 управления производством через LAN и т.п.
[0019] База 17 данных возмущающих крутящих моментов последовательно сохраняет фрагменты данных, указывающих возмущающие крутящие моменты (Tq), ассоциированные с позициями перемещения валов сочленения, которые передаются из модуля 2 управления роботом. Предыдущие возмущающие крутящие моменты (Tq) накапливаются в базе 17 данных возмущающих крутящих моментов.
[0020] Блок 18a вычислительной обработки активно выполняет диагностику неисправностей для робота 1 на основе возмущающих крутящих моментов (Tq), сохраненных в базе 17 данных возмущающих крутящих моментов. Блок 18a вычислительной обработки оснащен функцией запоминающего устройства и временно сохраняет данные, полученные посредством осуществления доступа к базе 17 данных возмущающих крутящих моментов, и выполняет диагностику неисправностей на основе этих данных. Ниже описываются подробности блока 18a вычислительной обработки со ссылкой на фиг. 3.
[0021] Устройство 4 управления производством представляет собой устройство, которое управляет производственной информацией, включающей в себя, например, рабочие ситуации технологических линий на заводе, и включает в себя блок 20 связи и базу 21 данных производственной информации. Блок 20 связи обменивается обязательными данными с блоком 15 связи модуля 3a диагностики неисправностей через LAN и т.п. База 21 данных производственной информации имеет функцию сохранения различных фрагментов собранной производственной информации. Таким образом, различные предыдущие фрагменты производственной информации накапливаются в базе 21 данных производственной информации. Блок 20 связи передает производственную информацию, накопленную в базе 21 данных производственной информации, в блок 15 связи в ответ на запрос, выполняемый посредством модуля 3a диагностики неисправностей.
[0022] Производственная информация включает в себя расписание для содержимого операций, выполняемых посредством робота 1. После того, как дата и время и робот 1 для выполнения операций зафиксированы, может указываться содержимое операций, выполняемых посредством робота 1. В случае если робот 1 устанавливается в технологической линии сборки транспортного средства, содержимое операций включает в себя информацию относительно, например, типа транспортного средства, связанного с каждой операцией, присутствия или отсутствия и содержимого опций, заданных для каждого транспортного средства, связанного с операцией, и процесса, которому соответствует операция. Процесс, которому соответствует операция, включает в себя этап прессования, этап сварки кузова транспортного средства, этап нанесения покрытия, этап формования на основе смолы и этап сборки.
[0023] Расписание для содержимого операций, собранных из устройства 4 управления производством, сохраняется в базе 19 данных содержимого операций. Различные виды данных по состоянию приведения в действие каждого вала сочленения робота 1, полученных посредством блока 13 получения данных состояния, также сохраняются в базе 19 данных содержимого операций через связь с модулем 2 управления роботом.
[0024] Модуль 3a диагностики неисправностей согласно первому варианту осуществления включает в себя базу 22 данных пороговых значений. Пороговые значения для предварительной установки диагностики неисправностей согласно содержимому операций предварительно сохраняются в базе 22 данных пороговых значений. Ниже описываются подробности означенного со ссылкой на фиг. 4.
[0025] Ниже описывается пример способа вычисления возмущающего крутящего момента (Tq) со ссылкой на фиг. 2. Блок 12 вычисления возмущающего крутящего момента различает фактическую частоту Vr вращения мотора 6, вычисленную из сигнала обратной связи по частоте вращения из импульсного кодера 7, чтобы вычислять ускорение. Блок 12 вычисления возмущающего крутящего момента умножает это ускорение на все инерции J, прикладываемые к мотору 6, чтобы вычислять ускоряющий крутящий момент Ta. Затем блок 12 вычисления возмущающего крутящего момента вычитает ускоряющий крутящий момент Ta из команды Tc управления крутящим моментом для мотора 6, вычисленной с помощью процесса циклического определения частоты вращения посредством блока 11 сервоуправления. Из значения, получающегося в результате вычитания, дополнительно вычитается момент M, чтобы вычислять возмущающий крутящий момент Tb. После этого, предварительно определенный процесс фильтрации выполняется для того, чтобы удалять возмущения нерегулярные компоненты, чтобы получать "возмущающий крутящий момент (Tq)". Посредством инструктирования блока 11 сервоуправления выполнять такую обработку в предварительно определенных интервалах дискретизации, могут последовательно определяться возмущающие крутящие моменты (Tq).
[0026] Более конкретно, блок 11 сервоуправления включает в себя регистр, и этот регистр находит абсолютную позицию мотора 6 посредством подсчета импульсов обратной связи по позиции из импульсного кодера 7 в предварительно определенных интервалах дискретизации. Таким образом, блок 11 сервоуправления обнаруживает абсолютную позицию мотора 6 посредством регистра и, из абсолютной позиции мотора 6, находит позицию угла поворота (позицию перемещения) вала сочленения, приводимого в действие посредством мотора 6. Дополнительно, блок 11 сервоуправления выполняет обработку на фиг. 2, как описано выше, чтобы вычислять возмущающий крутящий момент (Tq).
[0027] Ниже описываются подробности блока 18a вычислительной обработки со ссылкой на фиг. 3. Блок 18a вычислительной обработки включает в себя микропроцессор и формирует последовательность схем вычислительной обработки для выполнения диагностики неисправностей для робота 1 на основе его возмущающих крутящих моментов посредством выполнения предварительно установленной программы. Блок 18a вычислительной обработки включает в себя блок 31 группировки крутящих моментов и блок 32 диагностики неисправностей в качестве последовательности схем вычислительной обработки.
[0028] Блок 31 группировки крутящих моментов группирует возмущающие крутящие моменты (Tq) согласно содержимому операций, выполняемых посредством робота 1 при определении возмущающих крутящих моментов (Tq). Блок 32 диагностики неисправностей выполняет диагностику неисправностей для робота 1 посредством сравнения каждого сгруппированного возмущающего крутящего момента (Tq) и порогового значения (α).
[0029] Блок 31 группировки крутящих моментов может группировать возмущающие крутящие моменты (Tq) согласно типу транспортного средства, связанного с каждой операцией, в качестве примера содержимого операций. Информация относительно типа транспортного средства, связанного с каждой операцией, может получаться из расписания для содержимого операций, сохраненных в базе 19 данных содержимого операций.
[0030] Блок 31 группировки крутящих моментов может группировать возмущающие крутящие моменты (Tq) согласно процессу, которому соответствует каждая операция, в качестве другого примера содержимого операций. Информация относительно процесса, которому соответствует каждая операция, может получаться из расписания для содержимого операций, сохраненных в базе 19 данных содержимого операций.
[0031] Блок 31 группировки крутящих моментов может группировать возмущающие крутящие моменты (Tq) согласно расстоянию, на которое соответствующие валы сочленения робота 1 перемещаются при выполнении каждой операции, в качестве еще одного другого примера содержимого операций. Информация относительно расстояния перемещения валов сочленения может вычисляться согласно различным данным по состоянию приведения в действие каждого вала сочленения робота 1, полученным посредством блока 13 получения данных состояния.
[0032] Блок 31 группировки крутящих моментов может группировать возмущающие крутящие моменты (Tq) согласно величине тока, прикладываемого к мотору 6 в ходе приведения в действие вала сочленения робота 1 в течение каждой операции, в качестве еще одного другого примера содержимого операций. Информация относительно величины тока, прикладываемого к мотору 6, может вычисляться согласно различным данным по состоянию приведения в действие каждого вала сочленения робота 1, полученным посредством блока 13 получения данных состояния.
[0033] Часть (a) по фиг. 4 является графиком, иллюстрирующим возмущающие крутящие моменты (Tq), определенные посредством блока 11 сервоуправления и категоризированные согласно содержимому операций, выполняемых посредством робота 1 при определении возмущающих крутящих моментов (Tq). Часть (b) по фиг. 4 иллюстрирует возмущающие крутящие моменты (Tq), сгруппированные в категоризированные операции. Горизонтальная ось показывает время, а вертикальная ось показывает возмущающий крутящий момент (Tq). Возмущающие крутящие моменты (Tq) группируются на операцию 1, операцию 2 и операцию 3. Хотя часть (b) по фиг. 4 иллюстрирует только группу операции 1, группировка, идентичная группировки операции 1, применяется к операции 2 и операции 3.
[0034] Как показано в части (a) по фиг. 4, возмущающие крутящие моменты (Tq) могут значительно варьироваться в зависимости от содержимого операций, выполняемых посредством робота 1 при определении возмущающих крутящих моментов (Tq). В частности, примеры транспортных средств, изготовленных в технологических линиях, включают в себя транспортные средства различных типов, к примеру, компактные транспортные средства и крупногабаритные транспортные средства, и транспортные средства идентичного типа, изготовленные в различных процессах вследствие присутствия или отсутствия опций (в смешанной производственной системе). Содержимое операций, фактически выполняемых посредством идентичного робота 1, отличается в зависимости от производственных условий. Таким образом, параметры для диагностики неисправностей (возмущающие крутящие моменты (Tq)), которые должны определяться, могут варьироваться в зависимости от содержимого операций. Это может приводить к неправильной диагностике неисправностей, если диагностика неисправностей выполняется посредством использования фиксированного порогового значения независимо от содержимого операций.
[0035] Блок 32 диагностики неисправностей в силу этого выполняет диагностику неисправностей для робота 1 посредством сравнения порогового значения, предварительно заданного для каждого сгруппированного возмущающего крутящего момента (Tq), и соответствующего возмущающего крутящего момента (Tq). Например, пороговое значение (+αA,-αA) предварительно задается для операции 1, как показано в части (b) по фиг. 4. Аналогично, пороговое значение (+αB,-αB) и пороговое значение (+αC,-αC) предварительно задаются для операции 2 и операции 3, соответственно. Данные пороговых значений (+αA,-αA,+αB,-αB,+αC и-αC) предварительно задаются в базе 22 данных пороговых значений. Блок 32 диагностики неисправностей считывает пороговые значения из базы 22 данных пороговых значений. Блок 32 диагностики неисправностей сравнивает возмущающий крутящий момент (Tq) и предварительно заданное пороговое значение (α) в каждой категоризированной группе. Как показано в части (b) по фиг. 4, абсолютное значение возмущающего крутящего момента (Tq) превышает пороговое значение (αA) в время (t0), так что блок 32 диагностики неисправностей определяет то, что робот 1 подвержен неисправности в работе 1. Поскольку пороговое значение (α) предварительно задается для каждой категоризированной группы, соответствующее пороговое значение может быть выделено абсолютному значению возмущающего крутящего момента (Tq), которое варьируется в зависимости от содержимого операций.
[0036] Ниже описывается способ диагностики неисправностей согласно первому варианту осуществления со ссылкой на блок-схему последовательности операций способа на фиг. 5. Способ диагностики неисправностей согласно первому варианту осуществления осуществляется с использованием устройства 23 диагностики неисправностей на фиг. 1. На этапе S01, блок 13 получения данных состояния собирает различные данные по состоянию приведения в действие каждого вала сочленения робота 1 (данные, указывающие позицию угла поворота, частоту вращения и ток), и блок 12 вычисления возмущающего крутящего момента вычисляет возмущающие крутящие моменты (Tq) на основе данных, полученных посредством блока 13 получения данных состояния. Возмущающие крутящие моменты (Tq), вычисленные посредством блока 12 вычисления возмущающего крутящего момента, связываются с позициями перемещения валов сочленения и выводятся в модуль 3a диагностики неисправностей через блок 10 связи.
[0037] На этапе S03, блок 31 группировки крутящих моментов группирует возмущающие крутящие моменты (Tq) согласно содержимому операций, выполняемых посредством робота 1 при определении возмущающих крутящих моментов (Tq). Например, когда робот 1 работает в технологической линии транспортного средства, блок 31 группировки крутящих моментов группирует возмущающие крутящие моменты (Tq) согласно типу транспортного средства, связанного с каждой операцией, выполняемой посредством робота 1, процессу, которому соответствует операция, диапазону перемещения руки 5 робота при операции, току, прикладываемому к мотору 6 в ходе работы, или комбинациям этого содержимого. Ниже приводится случай, в котором возмущающие крутящие моменты (Tq) группируется в операцию 1, операцию 2 и операцию 3, идентично тому, как проиллюстрировано на фиг. 4. Блок 31 группировки крутящих моментов обращается к расписанию на предмет содержимого операций, сохраненных в базе 19 данных содержимого операций, так чтобы получать данные, указывающие тип транспортного средства, процесс, которому соответствует операция, диапазон перемещения руки 5 робота или ток, прикладываемый к мотору 6.
[0038] На этапе S05, S07 и S09, блок 32 диагностики неисправностей считывает пороговое значение (α1, α2, α3), заданное для каждой категоризированной операции, из базы 22 данных пороговых значений. В частности, как проиллюстрировано на фиг. 4, блок 32 диагностики неисправностей задает пороговое значение (+αA,-αA), пороговое значение (+αB,-αB) и пороговое значение (+αC,-αC) для операции 1, операции 2 и операции 3, соответственно.
[0039] На этапе S11, S13 и S15, блок 32 диагностики неисправностей сравнивает каждый сгруппированный возмущающий крутящий момент (Tq) с пороговым значением (α1, α2, α3), заданным для каждой категоризированной операции. Когда возмущающий крутящий момент (Tq) превышает пороговое значение (α1, α2, α3), блок 32 диагностики неисправностей определяет то, что робот 1 подвержен неисправности (S17, S21, S25). Когда возмущающий крутящий момент (Tq) меньше или равен пороговому значению (α1, α2, α3), блок 32 диагностики неисправностей определяет то, что робот 1 не подвержен неисправности (S19, S23, S27). Блок-схема последовательности операций способа на фиг. 5 реализуется, как указано выше, регулярно, чтобы выполнять диагностику неисправностей.
[0040] Как описано выше, первый вариант осуществления может обеспечивать следующие преимущества.
[0041] В случае если идентичный робот 1 выполняет множество операций с различным содержимым (таким как типы транспортных средств и процессы), возмущающие крутящие моменты (Tq), прикладываемые к валам сочленения робота 1, могут варьироваться в зависимости от содержимого операций. Диагностика неисправностей для робота 1 в силу этого в силу этого выполняется таким образом, что возмущающие крутящие моменты (Tq) группируются согласно содержимому операций, и каждый сгруппированный возмущающий крутящий момент (Tq) сравнивается с пороговым значением. Соответственно, точная диагностика неисправностей может выполняться с учетом варьирования возмущающих крутящих моментов (Tq) в зависимости от содержимого операций.
[0042] Блок 31 группировки крутящих моментов может группировать возмущающие крутящие моменты (Tq) согласно типу транспортного средства, связанного с каждой операцией, выполняемой посредством робота 1. Точная диагностика неисправностей в силу этого может выполняться независимо от варьирования возмущающих крутящих моментов (Tq) в зависимости от типа транспортного средства.
[0043] Блок 31 группировки крутящих моментов может группировать возмущающие крутящие моменты (Tq) согласно процессу, которому соответствует каждая операция, выполняемая посредством робота 1. Точная диагностика неисправностей в силу этого может выполняться независимо от варьирования возмущающих крутящих моментов (Tq) в зависимости от процесса, которому соответствует операция.
[0044] Блок 31 группировки крутящих моментов может группировать возмущающие крутящие моменты (Tq) согласно расстоянию, на которое соответствующие валы сочленения робота 1 перемещаются при выполнении каждой операции. Точная диагностика неисправностей в силу этого может выполняться независимо от варьирования возмущающих крутящих моментов (Tq) в зависимости от расстояния, на которое перемещаются валы сочленения.
[0045] Блок 31 группировки крутящих моментов может группировать возмущающие крутящие моменты (Tq) согласно величине тока, прикладываемого к мотору 6 в ходе приведения в действие вала сочленения робота 1 в течение каждой операции. Точная диагностика неисправностей в силу этого может выполняться независимо от варьирования возмущающих крутящих моментов (Tq) в зависимости от величины тока, прикладываемого к мотору 6.
[0046] Возмущающие крутящие моменты (Tq) могут группироваться независимо согласно типу транспортного средства, процессу, которому соответствует каждая операция, расстоянию, на которое перемещаются валы сочленения, и величине тока, прикладываемого к мотору 6. Возмущающие крутящие моменты (Tq) могут группироваться на более конкретные категории согласно необязательной комбинации их содержимое. Необязательная комбинация содержимого обеспечивает возможность более подробного установления пороговых значений, с тем чтобы точнее выполнять диагностику неисправностей.
[0047] Блок 32 диагностики неисправностей выполняет диагностику неисправностей для робота 1 посредством сравнения порогового значения (α1, α2, α3), предварительно заданного для каждого из сгруппированных возмущающих крутящих моментов (Tq), и соответствующего возмущающего крутящего момента (Tq). Поскольку пороговое значение (α1, α2, α3) предварительно задается для каждой категории, соответствующее пороговое значение может быть выделено абсолютному значению соответствующего варьирования возмущающих крутящих моментов (Tq) в зависимости от содержимого операций.
[0048] Второй вариант осуществления
Первый вариант осуществления примерно иллюстрирует случай, в котором когда идентичный робот выполняет множество операций с различным содержимым (таким как типы транспортных средств и процессы), пороговое значение задается для каждой из операций. Тем не менее, настоящее изобретение не ограничено этим, и диагностика неисправностей для робота 1 может выполняться с фиксированным пороговым значением независимо от содержимого операций в случае, если возмущающие крутящие моменты (Tq) могут быть стандартизированы между несколькими операциями, выполняемыми посредством идентичного робота. Второй вариант осуществления проиллюстрирован со случаем, в котором возмущающие крутящие моменты (Tq) сформированные во множестве операций, подвергаются обработке стандартизации, когда идентичный робот выполняет нескольких операций с различным содержимым (таким как типы транспортных средств и процессы).
[0049] Ниже описывается общая конфигурация системы 200 диагностики неисправностей, включающей в себя устройство 23 диагностики неисправностей согласно второму варианту осуществления, со ссылкой на фиг. 6.
[0050] Система 200 диагностики неисправностей отличается от фиг. 1 тем, что ее модуль 3b диагностики неисправностей дополнительно включает в себя базу 16 данных опорных значений для сохранения опорных значений возмущающего крутящего момента, вместо базы 22 данных пороговых значений, и тем, что ее блок 18b вычислительной обработки имеет другую схемную конфигурацию. Помимо этого, система 200 диагностики неисправностей является идентичной фиг. 1. Опорные значения возмущающего крутящего момента являются опорными значениями, используемыми для обработки стандартизации для возмущающих крутящих моментов (Tq). Опорные значения возмущающего крутящего момента задаются для каждого из сгруппированных возмущающих крутящих моментов. Например, опорные значения возмущающего крутящего момента являются комбинацией репрезентативного значения возмущающего крутящего момента (Tq) и величины изменения возмущающего крутящего момента (Tq). Репрезентативное значение возмущающего крутящего момента (Tq) может быть средним значением, медианой или интегралом возмущающего крутящего момента (Tq), определенного в ходе соответствующей операции, выполняемой посредством робота 1. Величина изменения возмущающего крутящего момента (Tq) может быть дисперсией, отклонением, среднеквадратическим отклонением или разностью между наибольшим значением и наименьшим значением возмущающего крутящего момента (Tq), определенного в ходе операции, выполняемой посредством робота 1. Настоящий вариант осуществления проиллюстрирован со случаем, в котором репрезентативное значение является средним значением возмущающего крутящего момента (Tq), и величина изменения является среднеквадратическим отклонением возмущающего крутящего момента (Tq).
[0051] Ниже описываются подробности блока 18b вычислительной обработки со ссылкой на фиг. 7. Блок 18b вычислительной обработки включает в себя микропроцессор и формирует последовательность схем вычислительной обработки для выполнения диагностики неисправностей для робота 1 на основе его возмущающих крутящих моментов посредством выполнения предварительно установленной программы. Блок 18b вычислительной обработки включает в себя блок 31 группировки крутящих моментов, блок 32 диагностики неисправностей и блок 33 коррекции крутящего момента, в качестве последовательности схем вычислительной обработки. Блок 18b вычислительной обработки отличается от блока 18a вычислительной обработки на фиг. 3 дополнительным включением блока 33 коррекции крутящего момента.
[0052] Блок 33 коррекции крутящего момента корректирует возмущающий крутящий момент (Tq) посредством использования опорных значений возмущающего крутящего момента, сохраненных в базе 16 данных опорных значений. Коррекция выполняется для каждой категоризированной операции. Весь сгруппированный возмущающий крутящий момент (Tq) подвергается коррекции. Опорные значения, используемые для коррекции, предварительно задаются для каждой категоризированной операции. Возмущающий крутящий момент (Tq), скорректированный таким способом, упоминается как скорректированный возмущающий крутящий момент (Tq'). В частности, блок 33 коррекции крутящего момента получает скорректированный возмущающий крутящий момент (Tq') посредством вычитания репрезентативного значения из возмущающего крутящего момента (Tq), определенного в ходе выполнения операции, и деления значения, получающегося в результате вычитания, на величину изменения. Блок 33 коррекции крутящего момента выполняет это вычисление в расчете на категоризированную операцию. Таким образом, блок 33 коррекции крутящего момента может получать скорректированный возмущающий крутящий момент (Tq'), стандартизированный между множеством операций с различным содержимым, выполняемых посредством идентичного робота 1.
[0053] Блок 32 диагностики неисправностей выполняет диагностику неисправностей для робота 1 посредством сравнения скорректированного возмущающего крутящего момента (Tq'), полученного посредством блока 33 коррекции крутящего момента, с одним пороговым значением (α). В частности, блок 32 диагностики неисправностей может определять то, что робот 1 подвержен неисправности, если абсолютное значение скорректированного возмущающего крутящего момента (Tq') превышает пороговое значение (α). Во втором варианте осуществления, пороговое значение (α) является значением, уникальным для робота 1, и является значением, фиксированным независимо того, какое содержимое операции (группы) выполняется посредством робота 1. Поскольку скорректированный возмущающий крутящий момент (Tq') является значением, стандартизированным между множеством операций, пороговое значение (α) не варьируется в зависимости от операции.
[0054] Ниже описывается способ диагностики неисправностей согласно второму варианту осуществления со ссылкой на блок-схему последовательности операций способа на фиг. 6. Способ диагностики неисправностей согласно второму варианту осуществления осуществляется с использованием устройства 23 диагностики неисправностей на фиг. 1.
[0055] Этапы S01 и S03 являются идентичными этапам на фиг. 5, и их пояснения опускаются. На этапах S31, S33 и S35, блок 33 коррекции крутящего момента выполняет обработку стандартизации для возмущающего крутящего момента (Tq) в каждой категоризированной группе. В частности, блок 33 коррекции крутящего момента считывает, из базы 16 данных опорных значений, опорные значения возмущающего крутящего момента (репрезентативное значение и величину изменения), предварительно заданные для каждой категоризированной группы. Блок 33 коррекции крутящего момента вычитает репрезентативное значение возмущающего крутящего момента (Tq) из возмущающего крутящего момента (Tq) и делит значение, получающееся в результате вычитания, на величину изменения возмущающего крутящего момента (Tq). Таким образом, блок 33 коррекции крутящего момента может получать скорректированный возмущающий крутящий момент (Tq') для каждой категоризированной операции 1, операции 2 и операции 3.
[0056] На следующем этапе S37, блок 32 диагностики неисправностей считывает одно пороговое значение (α), общее для категоризированных операций, из запоминающего устройства в микроконтроллере. Пороговое значение (α) может совместно использоваться посредством категоризированной операции 1, операции 2 и операции 3, так что оно может использоваться для каждого скорректированного возмущающего крутящего момента (Tq').
[0057] На следующем этапе S39, соответствующие скорректированные возмущающие крутящие моменты (Tq') в категоризированной операции 1, операции 2 и операции 3 сравниваются с одним пороговым значением (α). Когда один из скорректированных возмущающих крутящих моментов (Tq') превышает пороговое значение (α) ("Да" на этапе S39), робот 1 может считаться подверженным неисправности (этап S41). Когда скорректированные возмущающие крутящие моменты (Tq') меньше или равны пороговому значению (α) ("Нет" на этапе S39), робот 1 может считаться не подверженным неисправности (этап S43). Блок-схема последовательности операций способа на фиг. 8 реализуется, как указано выше, регулярно, чтобы выполнять диагностику неисправностей.
[0058] Как описано выше, второй вариант осуществления может обеспечивать следующие преимущества.
[0059] Блок 33 коррекции крутящего момента корректирует каждый сгруппированный возмущающий крутящий момент (Tq), чтобы получать скорректированный возмущающий крутящий момент (Tq'). Блок 32 диагностики неисправностей выполняет диагностику неисправностей для робота 1 посредством сравнения скорректированного возмущающего крутящего момента (Tq') с пороговым значением (α). Соответственно, диагностика неисправностей может выполняться с фиксированным пороговым значением (α) независимо от содержимого операций вследствие коррекции, выполняемой для возмущающего крутящего момента (Tq) каждой группы. Другими словами, более необязательно устанавливать различное пороговое значение для каждой операции.
[0060] Хотя выше описаны варианты осуществления настоящего изобретения, не следует понимать, что подробное описание и чертежи, составляющие часть этого раскрытия сущности, ограничивают это изобретение. Различные альтернативные варианты осуществления, примеры и рабочие технологии должны становиться очевидными для специалистов в данной области техники из этого раскрытия сущности.
Перечень позиционных обозначений
[0061] 1 - робот
2 - модуль управления роботом
3a, 3b - модуль диагностики неисправностей
6 - мотор
11 - блок сервоуправления (блок определения крутящего момента)
16 - база данных опорных значений
17 - база данных возмущающих крутящих моментов
18a, 18b - блок вычислительной обработки
19 - база данных содержимого операций
22 - база данных пороговых значений
23 - устройство диагностики неисправностей
24 - блок обнаружения позиции
31 - блок группировки крутящих моментов
32 - блок диагностики неисправностей
33 - блок коррекции крутящего момента
Tq - возмущающий крутящий момент
Tq' - скорректированный возмущающий крутящий момент
α - пороговое значение
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Устройство диагностики неисправностей и способ диагностики неисправностей

