Результат интеллектуальной деятельности: Транспортное средство, способ опознавания водителя и машиночитаемый носитель
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение в целом относится к опознаванию занимающих места людей транспортного средства, а конкретнее, опознаванию водителя с использованием векторов приближения к транспортному средству.
УРОВЕНЬ ТЕХНИКИ
Производятся транспортные средства, которые содействуют созданию занимающими места людьми профилей для хранения предпочтений по настройке транспортного средства, таких как положение сиденья, положение рулевой колонки, конфигурация устройства отображения в центральной консоли, и т. д. Зачастую, брелоки для ключей используются для опознавания конкретного водителя, с тем чтобы транспортное средство могло индивидуально настраивать транспортное средство согласно водительским предпочтениям по настройке транспортного средства. Однако, водители, которые совместно используют транспортные средства (такие как супруги, родители, дети, и т. д.), часто совместно используют брелоки для ключей. В таких случаях, водители не носят свои собственные индивидуальные брелоки для ключей, которые предоставляют индивидуальную идентифицирующую информацию. Для преодоления этого, некоторые транспортные средства опознают водителя, в то время как водитель находится в транспортном средстве, или требуют подтверждающего действия для его/ее опознавания до того, как водитель попадает в транспортное средство.
Сущность изобретения
Прилагаемая формула изобретения устанавливает границы этой заявки. Настоящее изобретение обобщает аспекты вариантов осуществления и не должно использоваться для ограничения формулы изобретения. Другие реализации предполагаются в соответствии с технологиями, описанными в материалах настоящей заявки, как должно быть понятно специалисту в данной области техники по изучению нижеследующих чертежей и подробного описания, и подразумевается, что эти реализации должны подпадать под объем этой заявки.
Раскрыты примерные варианты осуществления, предусматривающие системы и способы для опознавания водителя с использованием векторов приближения к транспортному средству. Примерное раскрытое транспортное средство включает в себя множество маяков, выполненных с возможностью присоединяться к первому мобильному устройству и второму мобильному устройству. Примерное транспортное средство также включает в себя множество ультразвуковых датчиков. Примерное транспортное средство включает в себя устройство для опознавания водителя, выполненное с возможностью предсказывать траектории для первого и второго мобильных устройств на основании информации, принятой с множества маяков и множества ультразвуковых датчиков, и определять, какое одно из мобильных устройств связано с водителем, на основании предсказанных траекторий.
Раскрыт примерный способ для опознавания водителя. Примерный способ включает в себя присоединение, с помощью множества маяков, к первому мобильному устройству и второму мобильному устройству. Примерный способ также включает в себя контроль, с помощью множества ультразвуковых датчиков, множества зон вокруг транспортного средства. Дополнительно, примерный способ включает в себя предсказывание траекторий для первого и второго мобильных устройств на основании информации, принятой с множества маяков и множества ультразвуковых датчиков. Примерный способ включает в себя определение, какое одно из мобильных устройств связано с водителем, на основании предсказанных траекторий.
Раскрыт примерный материальный машинно-читаемый носитель, содержащий команды. Примерные команды, когда выполняются, предписывают транспортному средству присоединяться, с помощью множества маяков, к первому мобильному устройству и второму мобильному устройству. Примерные команды предписывают транспортному средству контролировать, с помощью множества ультразвуковых датчиков, множество зон вокруг транспортного средства. Дополнительно, примерные команды предписывают транспортному средству предсказывать траектории для первого и второго мобильных устройств на основании информации, принятой с множества маяков и множества ультразвуковых датчиков. Примерные команды предписывают транспортному средству определять, какое одно из мобильных устройств связано с водителем, на основании предсказанных траекторий.
В частности, в одном аспекте изобретения раскрывается транспортное средство, содержащее: множество маяков, выполненных с возможностью присоединяться к первому мобильному устройству и второму мобильному устройству; множество ультразвуковых датчиков; и устройство для опознавания водителя, выполненное с возможностью: предсказывать траектории для первого и второго мобильных устройств на основании информации, принятой с множества маяков и множества ультразвуковых датчиков; и определять, какое одно из мобильных устройств связано с водителем, на основании предсказанных траекторий.
В одном из вариантов осуществления транспортное средство включает в себя сканер ключа, выполненный с возможностью вводить в действие множество маяков и множество ультразвуковых датчиков в ответ на выявление брелока для ключей, авторизованного осуществлять доступ в транспортное средство.
В одном из вариантов осуществления информация, принятая с каждого из множества маяков, включает в себя по меньшей мере одно из индикации интенсивности принимаемого сигнала или принятого значения интенсивности передачи; и при этом, информация, принятая с каждого из множества ультразвуковых датчиков, включает в себя то, находится ли объект в пределах зоны, контролируемой конкретным одним из множества ультразвуковых датчиков.
В одном из вариантов осуществления устройство для опознавания водителя выполнено с возможностью: на основании информации, принятой с каждого из множества маяков в первый момент времени, рассчитывать первое местоположение первого мобильного устройства и второе местоположение второго мобильного устройства; и на основании информации, принятой с каждого из множества маяков во второй момент времени после первого момента времени, рассчитывать третье местоположение первого мобильного устройства и четвертое местоположение второго мобильного устройства во второй момент времени после первого момента времени.
В одном из вариантов осуществления устройство для опознавания водителя выполнено с возможностью корректировать по меньшей мере одно из первого местоположения, второго местоположения, третьего местоположения или четвертого местоположения на основании информации, принятой с множества из ультразвуковых датчиков.
В одном из вариантов осуществления устройство для опознавания водителя выполнено с возможностью: рассчитывать первый вектор приближения для первого мобильного устройства на основании первого местоположения и третьего местоположения; и рассчитывать второй вектор приближения для второго мобильного устройства на основании второго местоположения и четвертого местоположения.
В одном из вариантов осуществления траектории для первого и второго мобильных устройств, предсказанные устройством для опознавания водителя, основаны на первом векторе приближения и втором векторе приближения, соответственно.
В одном из вариантов осуществления предсказанные траектории определяют пути, от первого и второго мобильных устройств до дверей транспортного средства.
В одном из вариантов осуществления транспортное средство включает в себя модуль управления сиденьем для настройки положения водительского сиденья на основании профиля, связанного с водителем.
В другом аспекте изобретения раскрывается способ опознавания водителя, содержащий этапы, на которых: присоединяются, с помощью множества маяков, к первому мобильному устройству и второму мобильному устройству; контролируют, с помощью множества ультразвуковых датчиков, множество зон вокруг транспортного средства; предсказывают, с помощью процессора, траектории для первого и второго мобильных устройств на основании информации, принятой с множества маяков и множества ультразвуковых датчиков; и определяют, с помощью процессора, какое одно из мобильных устройств связано с водителем, на основании предсказанных траекторий.
В одном из вариантов осуществления способ содержит этап, на котором вводят в действие множество маяков и множество ультразвуковых датчиков в ответ на выявление сканером ключа брелока для ключей, авторизованного осуществлять доступ в транспортное средство.
В одном из вариантов осуществления информация, принятая с каждого из множества маяков, включает в себя по меньшей мере одно из индикации интенсивности принимаемого сигнала или принятого значения интенсивности передачи; и при этом, информация, принятая с каждого из множества ультразвуковых датчиков, включает в себя то, находится ли объект в пределах зоны, контролируемой конкретным одним из множества ультразвуковых датчиков.
В одном из вариантов осуществления способ содержит этапы, на которых: на основании информации, принятой с каждого из множества маяков в первый момент времени, рассчитывают первое местоположение первого мобильного устройства и второе местоположение второго мобильного устройства; и на основании информации, принятой с каждого из множества маяков во второй момент времени после первого момента времени, рассчитывают третье местоположение первого мобильного устройства и четвертое местоположение второго мобильного устройства во второй момент времени после первого момента времени.
В одном из вариантов осуществления способ содержит этап, на котором корректируют по меньшей мере одно из первого местоположения, второго местоположения, третьего местоположения или четвертого местоположения на основании информации, принятой с множества из ультразвуковых датчиков.
В одном из вариантов осуществления способ содержит этапы, на которых: рассчитывают первый вектор приближения для первого мобильного устройства на основании первого местоположения и третьего местоположения; и рассчитывают второй вектор приближения для второго мобильного устройства на основании второго местоположения и четвертого местоположения.
В одном из вариантов осуществления траектории для первого и второго мобильных устройств, предсказанные устройством для опознавания водителя, основаны на первом векторе приближения и втором векторе приближения, соответственно.
В одном из вариантов осуществления предсказанные траектории определяют пути от первого и второго мобильных устройств до дверей транспортного средства.
В одном из вариантов осуществления способ содержит этап, на котором настраивают, с помощью модуля управления сиденьем, положение водительского сиденья на основании профиля, связанного с водителем.
В другом аспекте изобретения раскрывается материальный машиночитаемый носитель, содержащий команды, которые, при исполнении, предписывают транспортному средству: присоединяться, с помощью множества маяков, к первому мобильному устройству и второму мобильному устройству; контролировать, с помощью множества ультразвуковых датчиков, множество зон вокруг транспортного средства; и предсказывать траектории для первого и второго мобильных устройств на основании информации, принятой с множества маяков и множества ультразвуковых датчиков; и определять, какое одно из мобильных устройств связано с водителем, на основании предсказанных траекторий.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ради лучшего понимания изобретения, может быть сделана ссылка на варианты осуществления, показанные на нижеследующих чертежах. Компоненты на чертежах не обязательно находятся в масштабе, и связанные элементы могут быть опущены или, в некоторых случаях, могли быть преувеличены пропорции, с тем чтобы подчеркнуть и ясно проиллюстрировать обладающие новизной признаки, описанные в материалах настоящей заявки. В дополнение, компоненты системы могут быть скомпонованы по-разному, как известно в данной области техники. Кроме того, на чертежах, одинаковые номера ссылок обозначают соответствующие части на всем протяжении нескольких видов.
Фиг. с 1A по 1D иллюстрируют опознавание водителя с использованием векторов приближения к транспортному средству в соответствии с доктринами этого изобретения.
Фиг. 2 - структурная схема, иллюстрирующая примерные электронные компоненты транспортного средства по фиг. 1.
Фиг. 3 - блок-схема последовательности операций примерного способа для опознавания водителя с использованием векторов приближения к транспортному средству, который может быть реализован электронными компонентами по фиг. 2.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Несмотря на то, что изобретение может быть воплощено в различных формах, на чертежах показаны и будут описаны в дальнейшем некоторые примерные и неограничивающие варианты осуществления с пониманием, что настоящее раскрытие должно считаться иллюстративным примером изобретения и не подразумевается, что должно ограничивать изобретение проиллюстрированными конкретными вариантами осуществления.
Так как водители транспортного средства зачастую совместно используют брелок для ключей, применяется вспомогательный способ опознавания. Мобильные устройства (такие как смартфоны, планшеты, и т. д.) людей, связанных с транспортным средством (например, водителей, пассажиров, и т. д.) спариваются с транспортным средством через беспроводное соединение (например, соединение Bluetooth®, беспроводную локальную сеть, и т. д.). Это способствует взаимодействию мобильных устройств с транспортным средством. Например, музыка или подкасты могут воспроизводиться на звуковой системе транспортного средства; телефонные вызовы могут направляться через микрофон и громкоговорители транспортного средства, и т. д. Как обсуждено ниже в материалах настоящей заявки, беспроводное соединение может использоваться для идентификации, когда люди, связанные с мобильными устройствами, находятся в пределах дальности действия транспортного средства. Для содействия опознаванию людей, маяки, основанные на Bluetooth с малым потреблением энергии (BLE), установлены вокруг транспортного средства. На основании индикации интенсивности принимаемого сигнала (RSSI) и/или принятой интенсивности передачи (RX) между маяками и мобильным устройством(ами), местоположение мобильных устройств(а) оценивается с помощью трилатерации. В качестве используемых в материалах настоящей заявки, термины «трилатерировать» и «трилатерация» определены как последовательность операций определения местоположений точек (например, мобильных устройств, и т. д.) посредством измерения расстояний с использованием геометрии окружностей, сфер или треугольников. Таким образом, отслеживаются идентичности и приблизительное местоположение людей, связанных с транспортным средством. Предсказывается, что водителем является человек, чья траектория предсказана идущей к двери водительской стороны.
Однако, в некоторых окружающих обстановках, помехи могут вызывать ошибки, которые оказывают влияние на предсказание траектории мобильных устройств (и, таким образом, связанного человека). Например, отражения сигналов от находящихся поблизости транспортных средств или препятствий на пути между мобильным устройством и некоторыми из маяков могут вызывать несоразмерное падение, отражаемое в RSSI/RX. Как раскрыто ниже в материалах настоящей заявки, транспортное средство использует датчики дистанционного обнаружения, такие как ультразвуковые датчики, для подтверждения вектора приближения людей, связанных с мобильными устройствами. Датчики дистанционного обнаружения соотносятся с показаниями маяков, чтобы учитывать ситуации, где несоразмерные падения RSSI/RX, вызванные факторами окружающей среды, иначе приводили бы к неверным расчетам близости. Транспортное средство использует оцененные местоположения у маяков и объектов, выявленных датчиками дистанционного обнаружения, для предсказания траектории приближения к транспортному средству людей, связанных с мобильными устройствами. Транспортное средство предсказывает идентичность водителя на основании предсказанных траекторий приближения к транспортному средству.
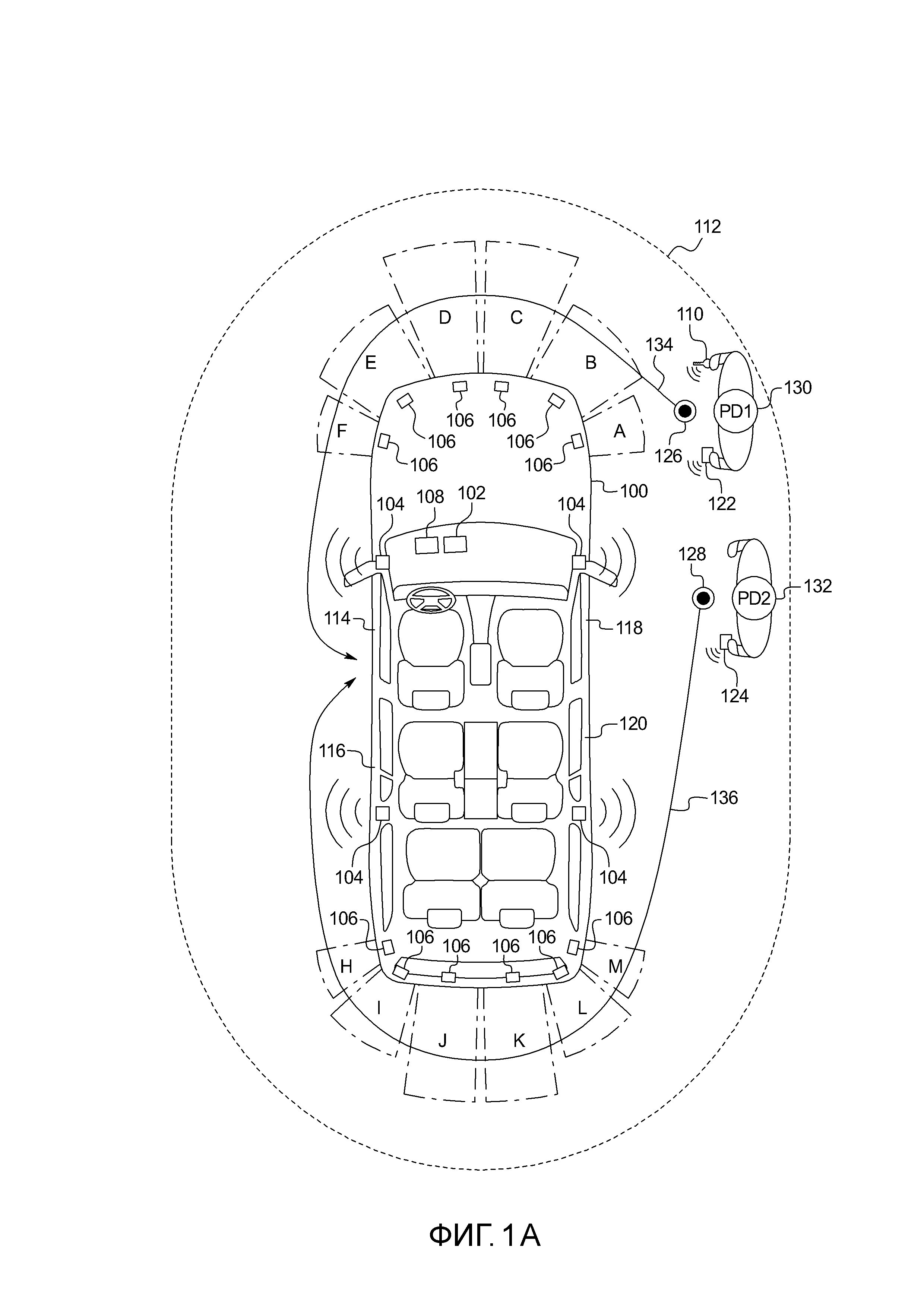
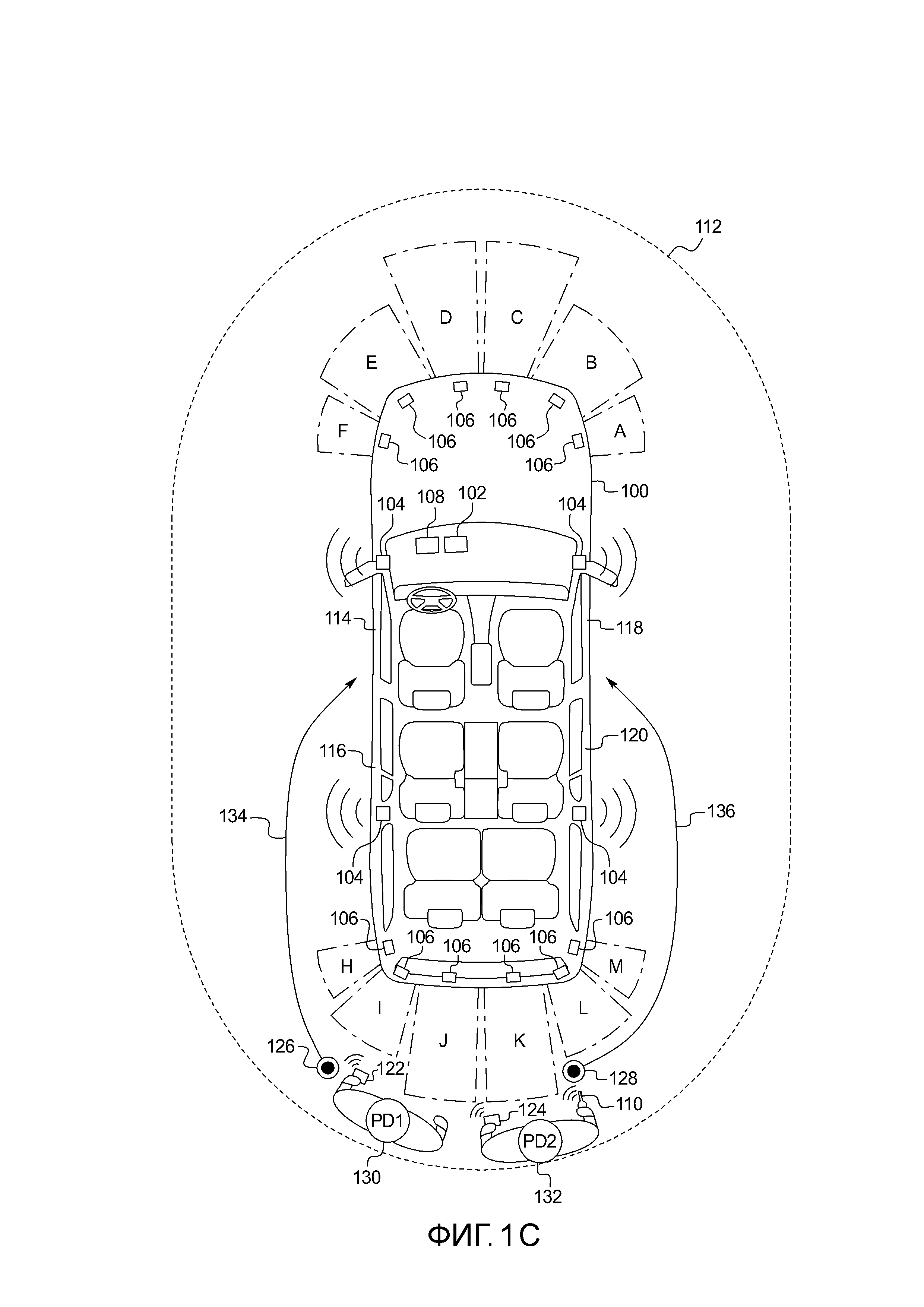
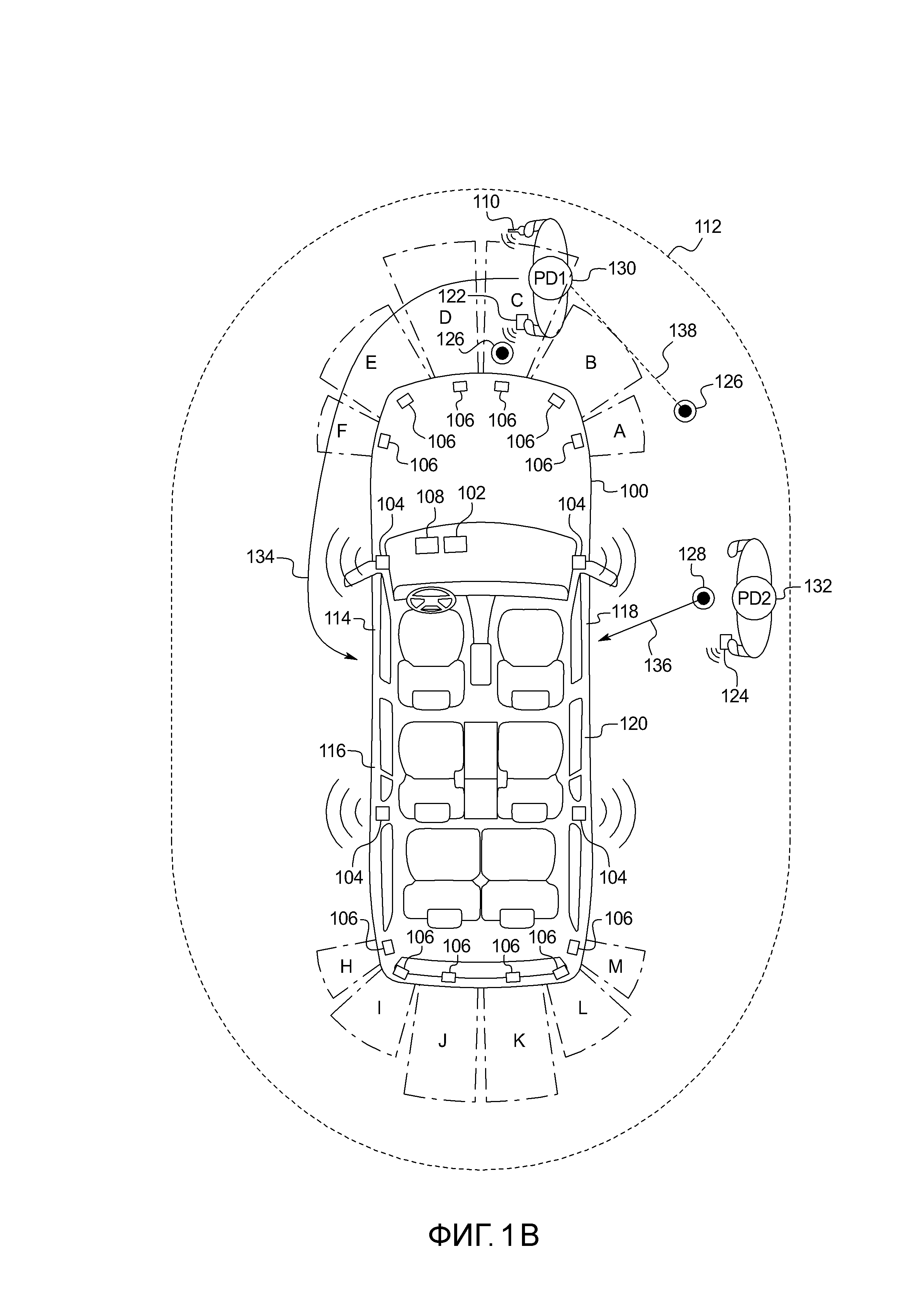
Фиг. с 1A по 1D иллюстрируют опознавание водителя с использованием векторов приближения к транспортному средству в соответствии с доктринами этого изобретения. В проиллюстрированных примерах, транспортное средство 100 включает в себя сканер 102 пассивного брелока для ключей, маяки 104, датчики 106 дистанционного обнаружения и устройство 108 для познавания водителя. Транспортное средство 100 может быть обычным транспортным средством с бензиновым силовым приводом, транспортным средством с гибридным приводом, транспортным средством с электрическим приводом, транспортным средством на топливных элементах или любым другим реализующим подвижность типом транспортного средства. Транспортное средство 100 может быть неавтономным или полуавтономным. Транспортное средство 100 включает в себя части, связанные с подвижностью, такие как силовая передача с двигателем, трансмиссия, подвеска, ведущий вал и/или колеса, и т. д.
Сканер 102 пассивного брелока для ключей выявляет, когда брелок 110 для ключей, связанный с транспортным средством 100, находится в пределах радиуса 112 от транспортного средства 100. В некоторых примерах, радиус 112 имеет значение трех метров (9,84 футов). Сканер 102 пассивного брелока для ключей вырабатывает маломощный низкочастотный сигнал, который выявляется брелоком 110 для ключей. Брелок 110 для ключей реагирует на сигнал для установления, что он является брелоком 110 для ключей, спаренным с (например, авторизован осуществлять доступ в) транспортным средством 100. В начале, для экономии питания, маяки 104 и датчики 106 дистанционного обнаружения не введены в действие. В ответ на выявление брелока 110 для ключей в пределах радиуса 112, устройство 108 для опознавания водителя вводит в действие маяки 104 и датчики 106 дистанционного обнаружения.
Маяки 104 расположены вокруг транспортного средства 100. В проиллюстрированных примерах, маяки 104 установлены возле передней двери 114 водительской стороны, задней двери 116 водительской стороны, передней двери 118 пассажирской стороны и задней двери 120 пассажирской стороны. Когда введены в действие, маяки 104 устанавливают соединения с мобильными устройствами 122 и 124 (например, смартфонами, многофункциональными телефонами, планшетами, и т. д.), которые были спарены с маяками 104. Мобильные устройства 122 и 124 могут быть спарены с маяками 104 во время последовательности операций установки с помощью информационно-развлекательного головного блока (например, информационно-развлекательного головного блока 204 по фиг. 2, приведенной ниже). Примерные маяки 104 реализуют Bluetooth с малым потреблением энергии (BLE). Протокол BLE изложен в томе 6 Спецификации Bluetooth версии 4.0 (и последующих редакциях), поддерживаемой Специальной группой по интересам Bluetooth.
Сообщения, обмениваемые между мобильным устройством(ами) 122 и 124 и маяками 104, включают в себя значения RSSI и/или RX между мобильным устройством(ами) 122 и 124 и маяками 104. Значения RSSI и RX измеряют интенсивность сигнала открытого тракта, которую мобильное устройство 122 и 124 выявляет с соответствующего маяка 104. RSSI измеряется процентным отношением интенсивности сигнала, значения (например, 0-100, 0-137, и т. д.) которого определяются производителем аппаратных средств, используемых для реализации маяков 104. Как правило, более высокая RSSI означает, что мобильное устройство 122 и 124 находится ближе к соответствующему маяку 104. Значения RX измеряются в децибелах на милливатт (дБ⋅мВт). Например, когда мобильное устройство 122 и 124 находится в одном метре (3,28 фута), значением RX может быть -60 дБ⋅мВт, а когда мобильное устройство находится в двух метрах (6,56 фута), значением RX может быть -66 дБ⋅мВт. Значения RSSI/RX используются для определения расстояния от мобильного устройства 122 и 124 до конкретного маяка 104.
Датчики 106 дистанционного обнаружения установлены на передний бампер и задний бампер транспортного средства 100 для выявления объектов в пределах заданной дальности по передней дуге и/или задней дуге от транспортного средства 100. В некоторых примерах, датчики 106 дистанционного обнаружения являются ультразвуковыми датчиками, которые используют высокочастотные звуковые волны. В проиллюстрированном примере, датчики 106 дистанционного обнаружения выявляют объекты в пределах зон A-F и H-M. Например, один из датчиков 106 дистанционного обнаружения может быть выполнен с возможностью выявлять объекты в пределах зоны C.
Устройство 108 опознавания водителя предсказывает траекторию водителя на основании значений RSSI/RX у маяков 104 и выявления объекта по датчикам 106 дистанционного обнаружения. В некоторых примерах, устройство 108 опознавания водителя находится в режиме малого энергопотребления до приема сигнала со сканера 102 пассивного брелока для ключей. Время от времени (например, каждые две секунды, каждые три секунды, и т. д.), устройство 108 опознавания водителя оценивает местоположение(ия) 126 и 128 мобильных устройств 122. Устройство 108 опознавания водителя оценивает местоположение(ия) 126 и 128 мобильных устройств(а) 122 и 124 на основании значений RSSI/RX, соответствующих мобильному устройству(ам) 122, принятых с маяков 104. Когда одно из оцененных местоположений 126 и 128 находится в пределах или возле одной из зон A-F или H-M, устройство 108 для опознавания водителя определяет, выявляет ли соответствующий датчик(и) 106 дистанционного обнаружения объект. Например, если оцененное местоположение 126 и 128 находится в зоне D, устройство 108 опознавания водителя определяет, выявляет ли датчик 106 дистанционного обнаружения, связанный с зоной D, объект. В некоторых примерах, устройство 108 опознавания водителя также определяет, выявляют ли объект какие-то из датчиков 106 дистанционного обнаружения, соответствующих смежной зоне. Например, если оцененное местоположение 126 и 128 находится в зоне C, устройство 108 опознавания водителя определяет, выявляют ли объект датчики 106 дистанционного обнаружения, связанные с зоной B, зоной C или зоной D. Если один из датчиков 106 дистанционного обнаружения выявляет объект, который соответствует одному из оцененных местоположений 126 и 128, устройство 108 опознавания водителя корректирует такое оцененное местоположение 126 и 128 в соответствии с местоположением объекта, выявленного датчиками 106 дистанционного обнаружения.
Для каждого из выявленных мобильных устройств 122 и 124, устройство 108 для опознавания водителя рассчитывает вектор приближения на основании следующих один за другим оцененных местоположений 126 и 128. Векторы приближения задают направление и скорость для соответствующего мобильного устройства 122 и 124. Устройство 108 опознавания водителя использует вектор(ы) приближения для предсказания, к какой двери 114, 116, 118 и 120 перемещается мобильное устройство(а) 122. Устройство 108 опознавания водителя обновляет векторы приближения и предсказанные траектории, когда оцениваются новые местоположения 126 и 128.
В некоторых примерах, устройство 108 опознавания водителя включает в себя алгоритм обучения, который использует контекстные данные (например, время суток, день недели, местоположение транспортного средства, и т. д.) для дополнения предсказания траектории возможного водителя. Например, если одно из мобильных устройств 122 и 124 преимущественно приближается к передней двери 114 водительской стороны по утрам в будние дни, то устройство 108 для опознавания водителя в начале может предсказывать, что человек, связанный с мобильным устройством 122 и 124, будет иметь траекторию в направлении передней двери 114 водительской стороны до тех пор, пока векторы приближения не отменяют предположение.
Фиг. 1A иллюстрирует пример первого возможного водителя 130, держащего брелок 110 для ключей и первое мобильное устройство 122, и второго возможного водителя 132, держащего второе мобильное устройство 124, в первый момент времени. В проиллюстрированном примере, устройство 108 для опознавания водителя выявляет брелок 110 для ключей и вводит в действие маяки 104 и датчики 106 дистанционного обнаружения. Устройство 108 для опознавания водителя оценивает первое местоположение 126 на основании значений RSSI/RX между маяками 104 и первым мобильным устройством 122. Устройство 108 для опознавания водителя оценивает второе местоположение 128 на основании значений RSSI/RX между маяками 104 и вторым мобильным устройством 124. На основании первого оцененного местоположения 126, устройство 108 для опознавания водителя предсказывает первую траекторию 134 для первого возможного водителя 130. На основании второго оцененного местоположения 128, устройство 108 для опознавания водителя предсказывает вторую траекторию 136 для второго возможного водителя 132. В проиллюстрированном примере по фиг. 1A, в первый момент времени, устройство 108 для опознавания водителя не выбирает, какой один из возможных водителей 130 и 132 является действующим водителем.
Фиг. 1B иллюстрирует пример первого возможного водителя 130 и второго возможного водителя 132 во второй момент времени после первого момента времени, проиллюстрированного на фиг. 1A. В проиллюстрированном примере, устройство 108 для опознавания водителя обновляет первое оцененное местоположение 126 на основании значений RSSI/RX между маяками 104 и первым мобильным устройством 122. Так как первое оцененное местоположение 126 находится в одной из зон (например, зоне C), устройство 108 для опознавания водителя рассчитывает первый вектор 138 приближения на основании первого оцененного местоположения 126 в первый момент времени и местоположение объекта (например, первого возможного водителя 130), выявленного датчиками 106 дистанционного обнаружения, во второй момент времени.
Устройство 108 для опознавания водителя обновляет второе оцененное местоположение 128 на основании значений RSSI/RX между маяками 104 и вторым мобильным устройством 124. В проиллюстрированном примере, так как первый вектор 138 приближения подтвердил первую траекторию 134, предсказанную в первый момент времени, устройство 108 для опознавания водителя предсказывает другой путь для второй траектории 136. В некоторых примерах, устройство 108 для опознавания водителя выбирает первого возможного водителя 130 в качестве действующего водителя. В некоторых таких примерах, устройство 108 для опознавания водителя может побуждать настройки предпочтения по интерьеру транспортного средства 100 устанавливаться согласно профилю, связанному с первым возможным водителем 130. В качестве альтернативы, в некоторых примерах, устройство 108 для опознавания водителя может ожидать до тех пор, пока первая предсказанная траектория 134 не подтверждена во второй момент времени, перед выбором первого возможного водителя 130 в качестве действующего водителя.
Фиг. 1C иллюстрирует пример первого возможного водителя 130, держащего первое мобильное устройство 120, и второго возможного водителя 132, держащего брелок 110 для ключей и второе мобильное устройство 124, в первый момент времени. В проиллюстрированном примере, устройство 108 для опознавания водителя выявляет брелок 110 для ключей и вводит в действие маяки 104 и датчики 106 дистанционного обнаружения. Устройство 108 для опознавания водителя оценивает первое местоположение 126 на основании значений RSSI/RX между маяками 104 и первым мобильным устройством 122. Устройство 108 для опознавания водителя оценивает второе местоположение 128 на основании значений RSSI/RX между маяками 104 и вторым мобильным устройством 124. На основании первого оцененного местоположения 126, устройство 108 для опознавания водителя предсказывает первую траекторию 134 для первого возможного водителя 130. На основании второго оцененного местоположения 128, устройство 108 для опознавания водителя предсказывает вторую траекторию 136 для второго возможного водителя 132.
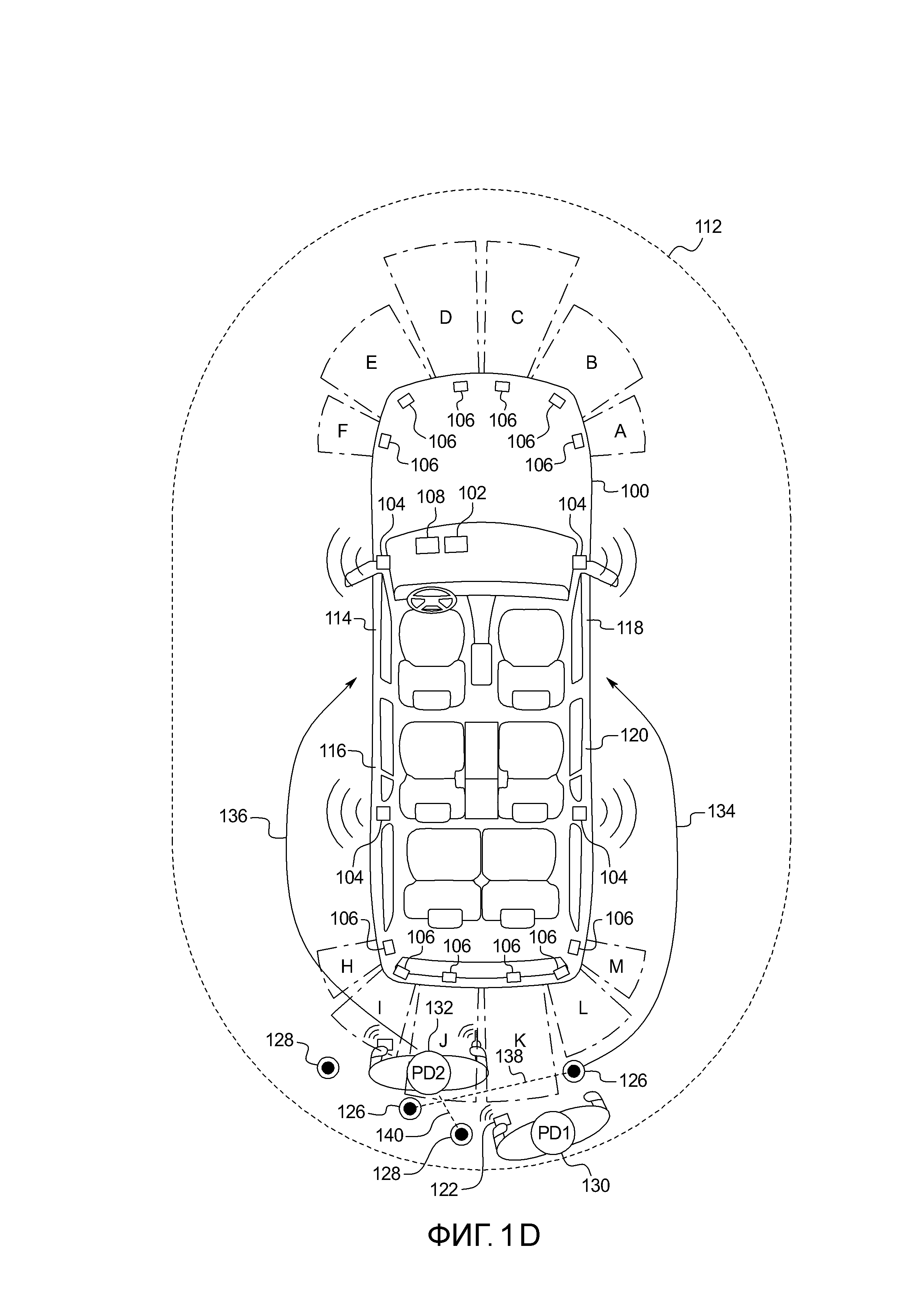
Фиг. 1D иллюстрирует пример первого возможного водителя 130 и второго возможного водителя 132 во второй момент времени после первого момента времени, проиллюстрированного на фиг. 1C. В проиллюстрированном примере, устройство 108 для опознавания водителя обновляет первое оцененное местоположение 126 на основании значений RSSI/RX между маяками 104 и первым мобильным устройством 122. Так как первое оцененное местоположение 126 находится возле одной из зон (например, зоны L), устройство 108 для опознавания водителя определяет, выявляют ли объект датчики 106 дистанционного обнаружения, связанные со смежными зонами (например, зонами K, L и M). Устройство 108 опознавания водителя рассчитывает первый вектор 138 приближения на основании первого оцененного местоположения 126 в первый момент времени и первого оцененного местоположения 126 во второй момент времени. На основании первого вектора 138 приближения, устройство 108 для опознавания водителя предсказывает первую траекторию 134.
Устройство 108 для опознавания водителя обновляет второе оцененное местоположение 128 на основании значений RSSI/RX между маяками 104 и вторым мобильным устройством 124. Так как второе оцененное местоположение 128 находится возле одной из зон (например, зоны I), определяет, выявляют ли объект датчики 106 дистанционного обнаружения, связанные со смежными зонами (например, зонами H, I и J). Устройство 108 опознавания водителя рассчитывает второй вектор 140 приближения на основании второго оцененного местоположения 128 в первый момент времени и местоположения объекта (например, второго возможного водителя 132), выявленного датчиками 106 дистанционного обнаружения. На основании второго вектора 140 приближения, устройство 108 для опознавания водителя предсказывает вторую траекторию 136.
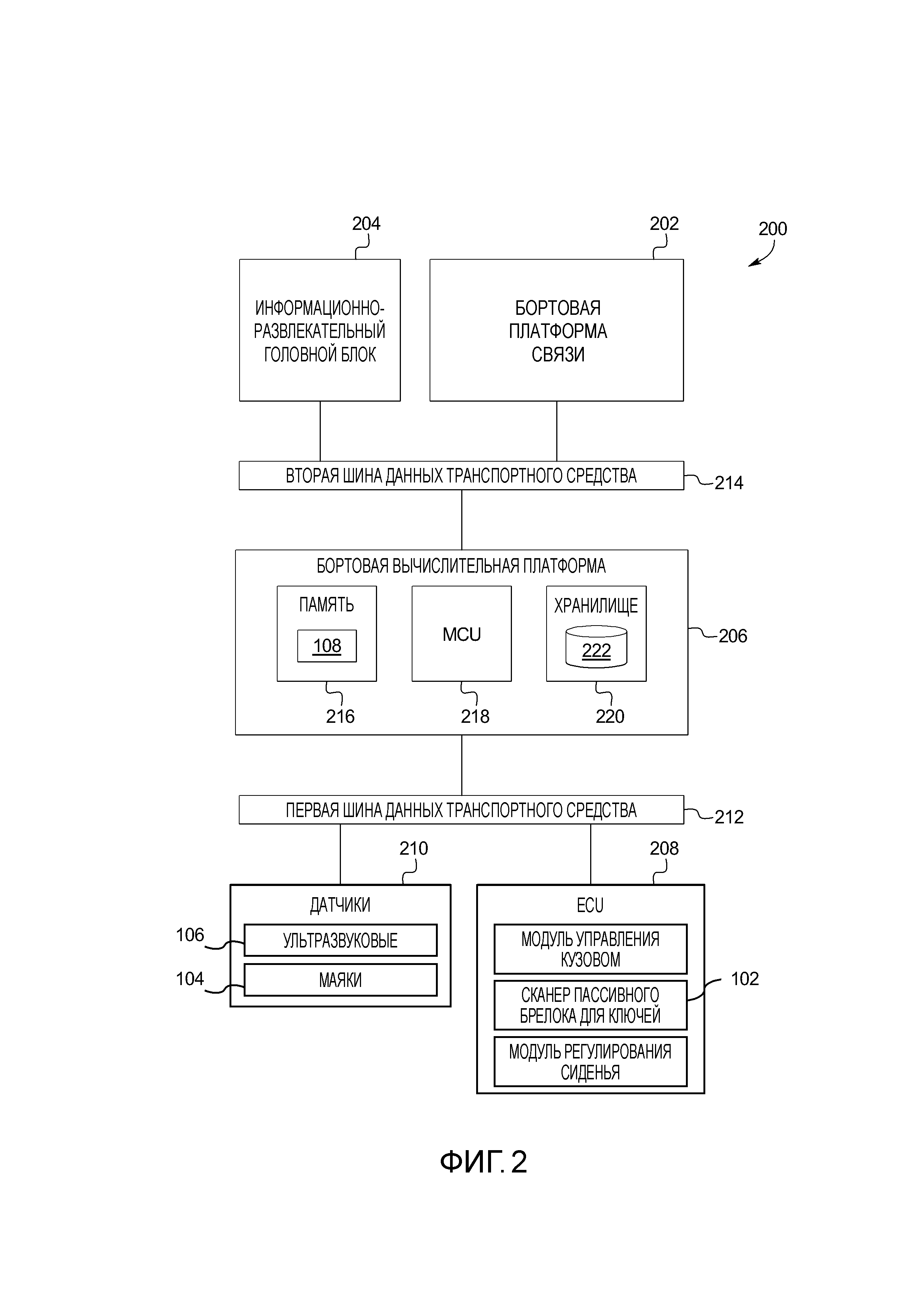
Фиг. 2 - структурная схема, иллюстрирующая примерные электронные компоненты 200 транспортного средства 100 по фиг. 1. Электронные компоненты 200 включают в себя примерную бортовую платформу 202 связи, примерный информационно-развлекательный головной блок 204, бортовую вычислительную платформу 206, примерные электронные блоки 208 управления (ECU), датчики 210, первую шину 212 данных транспортного средства и вторую шину 214 данных транспортного средства.
Бортовая платформа 202 связи включает в себя проводной или беспроводный сетевые интерфейсы, чтобы давать возможность связи с внешними сетями. Бортовая платформа 202 связи также включает в себя аппаратные средства (например, процессоры, память, хранилище, антенну, и т. д.) и программное обеспечение для управления проводными и беспроводными сетевыми интерфейсами. Бортовая платформа 202 связи включает в себя контроллеры для Bluetooth® и/или основанных на других стандартах сетей (например, глобальной системы мобильной связи (GSM), универсальной системы мобильной связи, (UMTS), долгосрочного развития (LTE), множественного доступа с кодовым разделением каналов (CDMA), WiMAX (IEEE 802.16m); связи через поле в ближней зоне (NFC); локальной беспроводной сети (в том числе, IEEE 802.11 a/b/g/n/ac или других) и Wireless Gigabit (IEEE 802.11ad), и т. д.). Бортовая платформа 202 связи также может включать в себя приемник глобальной системы определения местоположения (GPS). Кроме того, внешняя сеть(и) может быть сетью общего пользования, такой как сеть Интернет; частной сетью, такой как интранет (локальная сеть, использующая технологии Интернет); или их комбинацией, и может использовать многообразие сетевых протоколов, имеющихся в распоряжении в настоящее время или разработанных позже, в том числе, но не в качестве ограничения, основанные на TCP/IP сетевые протоколы. Бортовая платформа 202 связи может включать в себя проводной или беспроводный интерфейс, чтобы давать возможность непосредственной связи с электронным устройством (таким как смартфон, планшетный компьютер, дорожный компьютер, и т. д.).
Информационно-развлекательный головной блок 204 предусматривает интерфейс между транспортным средством 100 и пользователем (например, водителем, пассажиром, и т. д.). Информационно-развлекательный головной блок 204 включает в себя цифровые и/или аналоговые интерфейсы (например, устройства ввода и устройства вывода) для приема ввода от пользователя(ей) и отображения информации. Устройства ввода, например, могут включать в себя ручку управления, приборную панель, цифровую камеру для захвата изображений и/или визуального распознавания команд, сенсорный экран, устройство звукового ввода (например, микрофон в кабине), кнопки или сенсорную площадку. Устройства вывода могут включать в себя средства вывода комбинации приборов (например, круговые шкалы, осветительные устройства), исполнительные механизмы, панель приборного щитка, проекционный дисплей на ветровом стекле, устройство отображения центральной консоли (например, жидкокристаллический дисплей («LCD»), дисплей на органических светоизлучающих диодах («OLED»), плоскопанельный дисплей, твердотельный дисплей или проекционный дисплей на лобовом стекле) и/или громкоговорители.
Бортовая вычислительная платформа 206 включает в себя процессор или контроллер 216, память 218 и хранилище 220. Бортовая вычислительная платформа 206 сконструирована, чтобы включать в себя устройство 108 для опознавания водителя. Процессор или контроллер 216 может быть любым пригодным устройством обработки или набором устройств обработки, таким как, но не в качестве ограничения: микропроцессор, основанная на микроконтроллерах платформа, пригодная интегральная схема, одна или более программируемых пользователем вентильных матриц (FPGA), или одна или более специализированных интегральных схем (ASIC). Памятью 218 может быть энергозависимая память (например, ОЗУ (оперативное запоминающее устройство, RAM), которое может включать в себя энергонезависимое ОЗУ, магнитное ОЗУ, ферроэлектрическое ОЗУ и любые другие пригодные формы); энергонезависимая память (например, дисковая память, флэш-память (FLASH), СППЗУ (стираемые программируемые постоянные запоминающие устройства, EPROM) ЭСППЗУ (электрически стираемые программируемые постоянные запоминающие устройства, EEPROM), основанная на мемристорах энергонезависимая твердотельная память, и т. д.), немодифицируемая память (например, СППЗУ), и постоянное запоминающее устройство. В некоторых примерах, память 218 включает в себя многочисленные разновидности памяти, в частности, энергозависимую память и энергозависимую память. Хранилище 220 может включать в себя любое запоминающее устройство большой емкости, такое как накопитель на жестком диске и/или твердотельный накопитель.
Память 218 и хранилище 220 являются машинно-читаемым носителем, на котором могут быть воплощены один или более наборов команд, таких как программное обеспечение для приведения в действие способов по настоящему изобретению. Команды 926 могут воплощать один или более способов или логику, как описанные в материалах настоящей заявки. В конкретном варианте осуществления, команды могут находиться полностью или по меньшей мере частично в пределах любых одной или более из памяти 218, машинно-читаемого носителя и/или в пределах контроллера 216 во время выполнения команд.
В проиллюстрированном примере, хранилище 220 включает в себя базу 222 данных водительских профилей. База 222 данных водительских профилей включает в себя настройки предпочтений по интерьеру водителей (например, возможных водителей 130 и 132 по фиг. 1A-1D) транспортного средства 100. Настройки предпочтений по интерьеру включают в себя положение водительского сиденья, положение рулевой колонки, положение педалей, предварительные установки радиоприемника и/или настройки HVAC, и т. д.
Термины «постоянный машинно-читаемый носитель» и «машинно-читаемый носитель» включают в себя одиночный носитель или множественные носители, такие как централизованная или распределенная база данных и/или связанные устройства кэш-памяти и серверы, которые хранят один или более наборов команд. Термины «постоянный машинно-читаемый носитель» и «машинно-читаемый носитель» также включают в себя любой материальный носитель, который способен хранить, кодировать или переносить набор команд для выполнения процессором, или который побуждает систему выполнять любой один или более из способов или операций, раскрытых в материалах настоящей заявки. В качестве используемого в материалах настоящей заявки, термин «машинно-читаемый носитель» ясно определен включающим в себя любой тип машинно-читаемого запоминающего устройства и/или запоминающего диска для исключения распространяющихся сигналов.
Датчики 210 могут быть скомпонованы в и вокруг транспортного средства 100 любым пригодным образом. В проиллюстрированном примере, датчики включают в себя маяки 104 и датчики 106 дистанционного обнаружения. В проиллюстрированном примере, маяки 104 находятся поблизости от дверей 114, 116, 118 и 120. Датчики 106 дистанционного обнаружения могут быть ультразвуковыми датчиками и/или датчиками с радиолокатором (RADAR), которые размещены на бамперах транспортного средства 100.
ECU 208 контролирует и управляет системами транспортного средства 100. ECU 208 поддерживают связь и обмениваются информацией через первую шину 212 данных транспортного средства. Дополнительно, ECU 208 могут сообщать свойства (такие как состояние ECU 208, показания с датчиков, состояние устройства регулирования, коды ошибки и диагностические коды, и т. д.) в и/или принимать команды из бортовой вычислительной системы 206. Некоторые транспортные средства 100 могут иметь семьдесят или более ECU 208, расположенных в различных местах по транспортному средству 100, соединенных с возможностью обмена информацией через первую шину 212 данных транспортного средства. ECU 208 являются дискретными наборами электроники, которые включают в себя свою собственную схему(ы) (такую как интегральные схемы, микропроцессоры, память, хранилище, и т. д.) и встроенные программы, датчики, исполнительные механизмы и/или монтажную арматуру. В проиллюстрированном примере, ECU 208 включают в себя сканер 102 пассивного брелока для ключей, модуль управления кузовом для управления подсистемами транспортного средства, такими как электрические дверные замки, и модуль управления сиденьем для регулирования положения сиденья.
Первая шина 212 данных транспортного средства с возможностью обмена информацией связывает ECU 208, датчики и бортовую вычислительную платформу 206. В некоторых примерах, первая шина 212 данных транспортного средства является шиной локальной сети контроллеров (CAN) с протоколом, как определенный Международной организацией по стандартизации (ISO) 11898-1. В качестве альтернативы, в некоторых примерах, первая шина 212 данных транспортного средства может быть шиной транспортировки данных мультимедийных систем (MOST), шиной Ethernet или шиной многофункциональных данных локальной сети контроллеров (CAN-FD) (ISO 11898-7). Вторая шина 214 данных транспортного средства с возможностью обмена информацией соединяет бортовую платформу 202 связи, информационно-развлекательный головной блок 204 и бортовую вычислительную платформу 206. Вторая шина 214 данных транспортного средства может быть шиной Ethernet, шиной CAN-FD или шиной MOST, и т. д. В некоторых примерах, бортовая вычислительная платформа 206 изолирует по возможности обмена информацией вторую шину 214 данных транспортного средства и первую шину 212 данных транспортного средства (например, с помощью межсетевых экранов, брокеров сообщений, и т. д.). В качестве альтернативы, в некоторых примерах, первая шина 212 данных транспортного средства и вторая шина 214 данных транспортного средства являются одной и той же шиной данных.
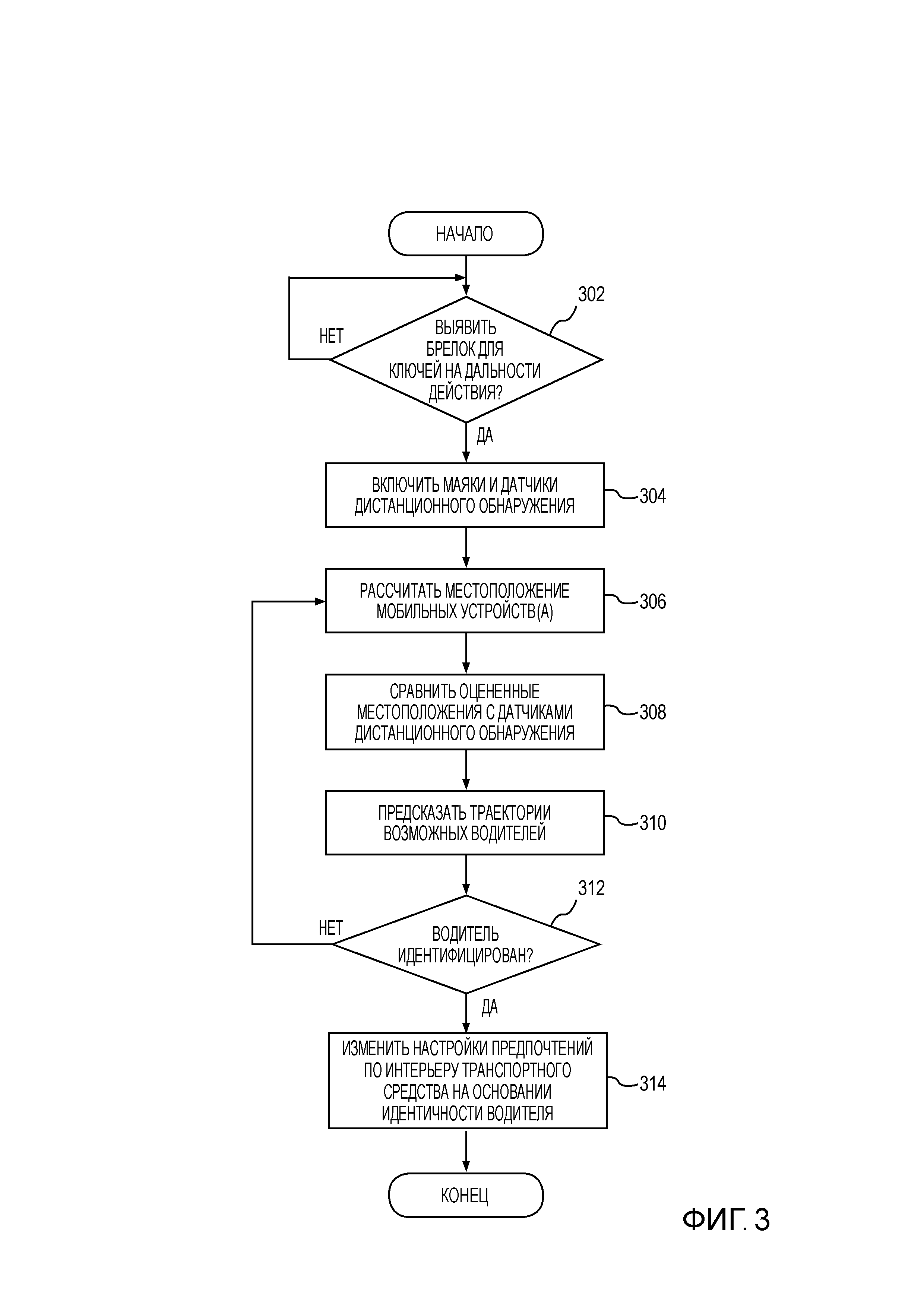
Фиг. 3 - блок-схема последовательности операций примерного способа для опознавания водителя с использованием векторов приближения к транспортному средству, который может быть реализован электронными компонентами 200 по фиг. 2. В начале, устройство 108 для опознавания водителя, с помощью сканера 102 пассивного брелока для ключей, выявляет, когда брелок 110 для ключей находится в пределах дальности действия (например, в пределах радиуса 112 (вершина 302 блок-схемы)). В ответ на выявление брелока 110 для ключей, устройство 108 для опознавания водителя вводит в действие маяки 104 и датчики 106 дистанционного обнаружения (вершина 304 блок-схемы). С использованием значений RSSI/RX, принятых с маяков 104, устройство 108 для опознавания водителя рассчитывает местоположение(ия) 126 и 128 мобильных устройств(а) 126 и 128 (вершина 306 блок-схемы) с использованием трилатерации. Устройство 108 для опознавания водителя сравнивает местоположение(ия) 126 и 128, оцененное на вершине 306 блок-схемы, с показаниями с датчиков 106 дистанционного обнаружения (вершина 308 блок-схемы).
Устройство 108 опознавания водителя затем предсказывает траектории 134 и 136 возможных водителей 130 и 132 (вершина 310 блок-схемы). Устройство 108 опознавания водителя предсказывает траектории 134 и 136 на основании векторов 138 и 140 приближения, рассчитанных по изменениям оцененного местоположения(ий) 126 и 128 и показаниям с датчиков 106 дистанционного обнаружения, принятых через период времени. Например, первое оцененное местоположение 126 в первый момент времени и первое оцененное местоположение 126 во второй момент времени формируют вектор приближения (например, направление перемещения и скорость, и т. д.) для возможного водителя 130, связанного с первым оцененным местоположением 126, относительно транспортного средства 100. В некоторых примерах, устройство 108 для опознавания водителя предсказывает траектории 134 и 136 до одной из дверей 114, 116, 118 и 120 с использованием векторов приближения.
Устройство 108 для опознавания водителя определяет, может ли один из возможных водителей 130 и 132 быть опознан в качестве действующего водителя, на основании траекторий, предсказанных на вершине 308 блок-схемы (вершина 312 блок-схемы). Например, устройство 108 для опознавания водителя может определять, что один из возможных водителей 130 и 132 может быть опознан в качестве действующего водителя, только когда одна из предсказанных траекторий 134 и 136 предполагается ведущей к передней двери водительской стороны, и что подтверждается последующим предсказанием траектории. Если устройство 108 для опознавания водителя опознает одного из возможных водителей 130 и 132 в качестве действующего водителя, устройство 108 для опознавания водителя побуждает предпочтения по интерьеру устанавливаться (например, с помощью модуля управления сиденьем, информационно-развлекательного головного блока 204, и т. д.) согласно профилю опознанного действующего водителя (вершина 314 блок-схемы). Иначе, если устройство 108 для опознавания водителя не опознает одного из возможных водителей 130 и 132 в качестве действующего водителя, устройство 108 для опознавания водителя продолжает контролировать местоположение(ия) 126 и 128 мобильных устройств 122 и 124 (вершина 206 блок-схемы).
Блок-схема последовательности операций способа по фиг. 3 является представляющей машинно-читаемые команды, которые содержат одну или более программ, которые, при исполнении процессором (таким как процессор 216 по фиг. 2), предписывают транспортному средству 100 реализовывать устройство 108 для опознавания водителя по фиг. 1A-1D. Кроме того, хотя примерные программы описаны со ссылкой на блок-схему последовательности операций способа, проиллюстрированную на фиг. 3, многие другие способы реализации примерного устройства 108 для опознавания водителя могут использоваться в качестве альтернативы. Например, порядок приведения в исполнение вершин блок-схемы может быть изменен, и/или некоторые из описанных вершин блок-схемы могут быть изменены, исключены или объединены.
В этой заявке подразумевается, что использование дизъюнктивных суждений должно включать в себя конъюнктивное суждение. Использование формы единственного числа не подразумевается указывающим мощность множества. В частности, подразумевается, что ссылка на определенный объект или неопределенный объект также должна обозначать один из возможного множества таких объектов. Кроме того, союз «или» может использоваться для выражения признаков, которые присутствуют одновременно, вместо взаимоисключающих альтернатив. Другими словами, союз «или» следует понимать включающим в себя «и/или». Термины «включает в себя», «включающий в себя» и «включают в себя» являются инклюзивными и имеют тот же самый объем, что и «содержит», «содержащий» и «содержат», соответственно.
Описанные выше варианты осуществления и, в частности, любые «предпочтительные» варианты осуществления, являются возможными примерами реализаций и изложены всего лишь для ясного понимания принципов изобретения. Многие варианты и модификации могут быть произведены в отношении описанных выше вариантов(а) осуществления, по существу не отходя от сущности и принципов технологий, описанных в материалах настоящей заявки. Все модификации подразумеваются включенными в материалы настоящей заявки в объеме данного изобретения и защищенными нижеследующей формулой изобретения.
Корпус рулевой рейки с поперечными сужениями
Усовершенствованное прессовое соединение корпуса зубчатой рейки
Рулевой клапан с планетарной передачей
Способ управления двигателем, выполненным с возможностью работы на газообразном топливе, двигатель, имеющий цилиндры, выполненные с возможностью сжигания газообразного топлива и двигатель, выполненный с возможностью сжигания газообразного топлива
Способ проверки системы продувки паров транспортного средства, транспортное средство с гибридным приводом и способ проверки системы продувки паров на борту транспортного средства
Устройство и способ инжекционного формования вспененных полимеров
Транспортное средство (варианты)
Двигатель внутреннего сгорания с турбонагнетателем, приводная система и способ работы двигателя внутреннего сгорания с турбонагнетателем (варианты)
Блок цилиндров (варианты) и способ работы системы смазки в двигателе
Несущий каркас (варианты)
Взаимодействие между транспортными средствами для упорядочивания дорожного движения
Система планирования работы беспроводного маяка транспортного средства (варианты)
Способ и система парковки транспортного средства

