Результат интеллектуальной деятельности: Способ управления манипулятором
Вид РИД
Изобретение
Изобретение относится к робототехнике и, в частности, к системам управления манипуляторами, расположенными на мобильных роботах (MP).
Известен робототехнический комплекс, содержащий напольный робокар, включающий в себя шасси с установленными на нем приводами, блоком отсчета перемещений и промышленным манипулятором, подвесной робот-наблюдатель, выполненный в виде сканирующей Web-камеры с блоком координатного перемещения и связанным с ним блоком программирования координат, и терминал оператора, входы которого соединены с блоком отсчета перемещений, установленным на шасси, и Web-камерой, а выходы - с промышленным манипулятором и установленными на шасси приводами, он снабжен блоком преобразования текущих координат шасси в координаты Web-камеры, первой и второй ключевыми схемами, генератором импульсов и элементом задержки импульсов, при этом рабочий вход первой ключевой схемы соединен с блоком отсчета перемещений шасси, а ее выход - со входом блока преобразования координат, рабочий вход второй ключевой схемы соединен с выходами блока преобразования координат, а ее выход - с блоком программирования координат Web-камеры, причем выход генератора импульсов через элемент задержки соединен с управляющим входом второй ключевой схемы и напрямую - с управляющим входом первой ключевой схемы (Патент РФ №160746, 2016 г.).
Недостатком этого устройства является то, что в нем устанавливается только жесткая, точно определяемая связь в плоскости между координатами робокара и подвесного робота-наблюдателя. Если этой жесткой связи нет, то описанное устройство становится неработоспособным.
Известен также способ управления манипулятором, закрепленным на основании мобильного робота с первой системой технического зрения и калибровочным инструментом с использованием второго мобильного робота со второй системой технического зрения, заключающийся в том, что координаты этого калибровочного инструмента сравнивают с координатами характерной точки рабочего органа манипулятора после перемещения этого рабочего органа к калибровочному инструменту и с помощью первой системы технического зрения, оснащенной системой цифровой обработки видеоинформации, регистрируют отклонение этого калибровочного инструмента от характерной точки рабочего органа манипулятора в первой системе координат, жестко связанной с основанием первого мобильного робота, в которой работает манипулятор (Патент РФ №2466858, 2012 г.).
Этот способ является наиболее близким к предлагаемому изобретению. Однако его нельзя использовать, когда информацию об объектах работ манипулятор получает не от системы технического зрения (СТЗ), которая одновременно может осуществлять контроль точности контурных перемещений манипулятора и установлена на том же основании, что и манипулятор, а от СТЗ, установленной на другом мобильном роботе (MP), перемещающимся произвольно в пространства.
Задачей, на решение которой направлено предлагаемое техническое решение, является устранение указанного выше недостатка и, в частности, обеспечение точного выполнения всех предписанных манипуляционных операций, когда информацию о координатах объектах работ манипулятор получает не от СТЗ, установленной на основании манипулятора, которая по разным причинам не может видеть этот объект, а от СТЗ, расположенной на другом MP, находящимся в другом (произвольном) месте пространства.
Технический результат, получаемый при решении поставленной задачи, заключается в сохранении заданной точности (качества) автоматического выполнения всех предписанных манипуляционных операций за счет введения второй СТЗ, произвольно перемещаемой вторым мобильным роботом в пространстве и наблюдающей объект работ, а также за счет устранения погрешностей в передаче навигационных данных об указанном объекте работ от мобильного робота, на котором установлена вторая СТЗ, в систему управляющую манипулятором, обеспечивающую его работу в связанной с ним системе координат.
Поставленная задача решается тем, что в рассматриваемом способе управления манипулятором, закрепленным на основании мобильного робота с первой системой технического зрения и калибровочным инструментом с использованием второго мобильного робота со второй системой технического зрения, заключающийся в том, что координаты этого калибровочного инструмента сравнивают с координатами характерной точки рабочего органа манипулятора после перемещения этого рабочего органа к калибровочному инструменту и с помощью первой системы технического зрения, оснащенной системой цифровой обработки видеоинформации, регистрируют отклонение этого калибровочного инструмента от характерной точки рабочего органа манипулятора в первой системе координат, жестко связанной с основанием первого мобильного робота, в которой работает манипулятор, отличается тем, что вводят вторую систему технического зрения, также оснащенную системой цифровой обработки видеоинформации, которую устанавливают на основании второго мобильного робота, способного произвольно перемещаться в пространстве отдельно от первого мобильного робота таким образом, чтобы его вторая система технического зрения могла видеть объект манипулирования, который не доступен для наблюдения первой системой технического зрения, но доступен для манипулятора, и одновременно калибровочный инструмент, после определения с помощью второй системы технического зрения расположения объекта манипулирования, и калибровочного инструмента во второй системе координат, жестко связанной с основанием второго мобильного робота, с помощью его второй навигационной системы передают полученные и взаимосвязанные между собой в пространстве координаты объекта манипулирования, и калибровочного инструмента из второй связанной системы координат второго мобильного робота в абсолютную систему координат, а из нее с помощью первой навигационной системы первого мобильного робота - в его первую связанную систему координат, затем на основе информации о координатах пространственного расположения калибровочного инструмента в первой связанной системе координат, полученных первой навигационной системой, перемещают рабочий орган манипулятора в точку с этими координатами, после определения системой цифровой обработки видеоинформации первой системы технического зрения пространственного отклонения характерной точки рабочего органа манипулятора от калибровочного инструмента определяют погрешность передачи навигационной информации о расположении калибровочного инструмента из второй в первую связанную систему координат, которая совпадает с погрешностью передачи навигационной информации о расположении объекта манипулирования, в первой связанной системе координат устраняют выявленную погрешность в расположении указанного объекта в первой связанной системе координат путем пересчета его координат в первой связанной системе координат с учетом выявленного пространственного отклонения характерной точки рабочего органа манипулятора от калибровочного инструмента. При этом калибровочный инструмент установлен на стержне, который выполняют упругим.
Сопоставительный анализ существенных признаков заявляемого способа с существенными признаками аналогов и прототипа свидетельствует о его соответствии критерию «новизна».
При этом отличительные признаки формулы изобретения решают следующие функциональные задачи.
Признак «… вводят вторую систему технического зрения, также оснащенную системой цифровой обработки видеоинформации, которую устанавливают на основании второго мобильного робота, способного произвольно перемещаться в пространстве отдельно от первого мобильного робота таким образом, чтобы его вторая система технического зрения могла видеть объект манипулирования, который не доступен для наблюдения первой системой технического зрения, но доступен для манипулятора, и одновременно калибровочный инструмент…» обеспечивает обнаружение и определение пространственных координат расположения объекта манипулирования в месте, недоступном для СТЗ первого мобильного робота с манипулятором. Под объектом манипулирования подразумеваются детали, изделия, конструкции значительные по размерам, имеющие сложные очертания, которые подлежат обработке.
Признак «… после определения с помощью второй системы технического зрения расположения объекта манипулирования и калибровочного инструмента во второй системе координат, жестко связанной с основанием второго мобильного робота, с помощью его второй навигационной системы передают полученные и взаимосвязанные между собой в пространстве координаты объекта манипулирования и калибровочного инструмента из второй связанной системы координат второго мобильного робота в абсолютную систему координат, а из нее с помощью первой навигационной системы первого мобильного робота - в его первую связанную систему координат…» обеспечивает определение координат и пространственного расположения полученных объекта манипулирования и калибровочного инструмента в первой связанной системе координат первого мобильного робота.
Признак «… затем на основе информации о координатах пространственного расположения калибровочного инструмента в первой связанной системе координат, полученных первой навигационной системой, перемещают рабочий органа манипулятора в точку с этими координатами…» обеспечивает такое перемещение рабочего органа манипулятора, при котором в первой связанной системе координат определяется позиционирование характерной точки рабочего органа манипулятора относительно калибровочного инструмента.
Признак «… после определения системой цифровой обработки видеоинформации первой системы технического зрения пространственного отклонения характерной точки рабочего органа манипулятора от калибровочного инструмента определяют погрешность передачи навигационной информации о расположении калибровочного инструмента из второй в первую связанную систему координат, которая совпадает с погрешностью передачи навигационной информации о расположении объекта манипулирования в первой связанной системе координат с учетом выявленного пространственного отклонения характерной точки рабочего органа манипулятора от калибровочного инструмента...» обеспечивает точное определение пространственного расположения и ориентации объекта манипулирования в первой связанной системе координат для последующего точного выполнения всех требуемых технологических операций с помощью манипулятора.
Признак, указывающий, что «калибровочный инструмент установлен на стержне, который выполняют упругим» гарантирует сохранность узлов калибровочного инструмента при случайном столкновении с рабочим органом манипулятора.
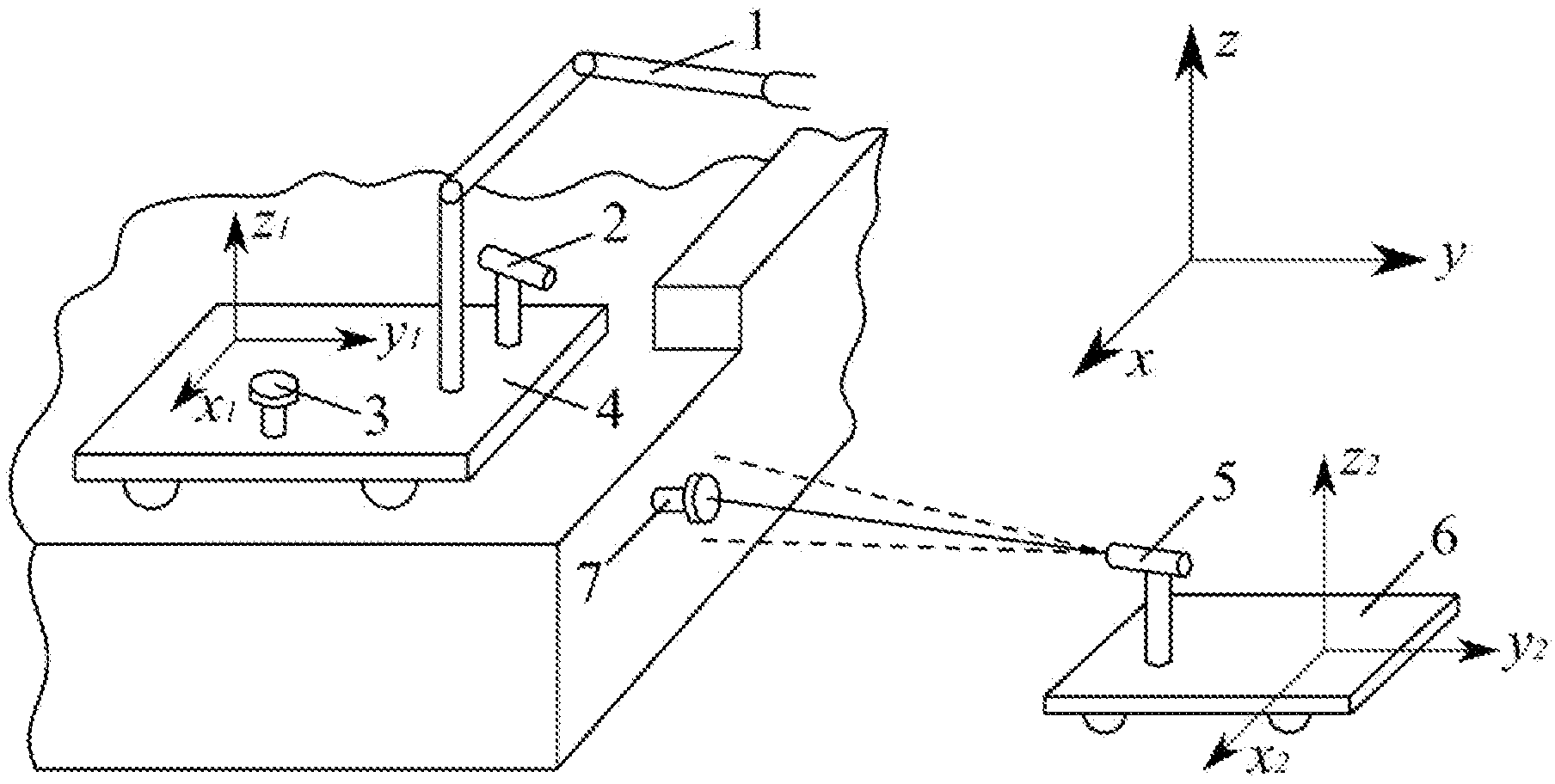
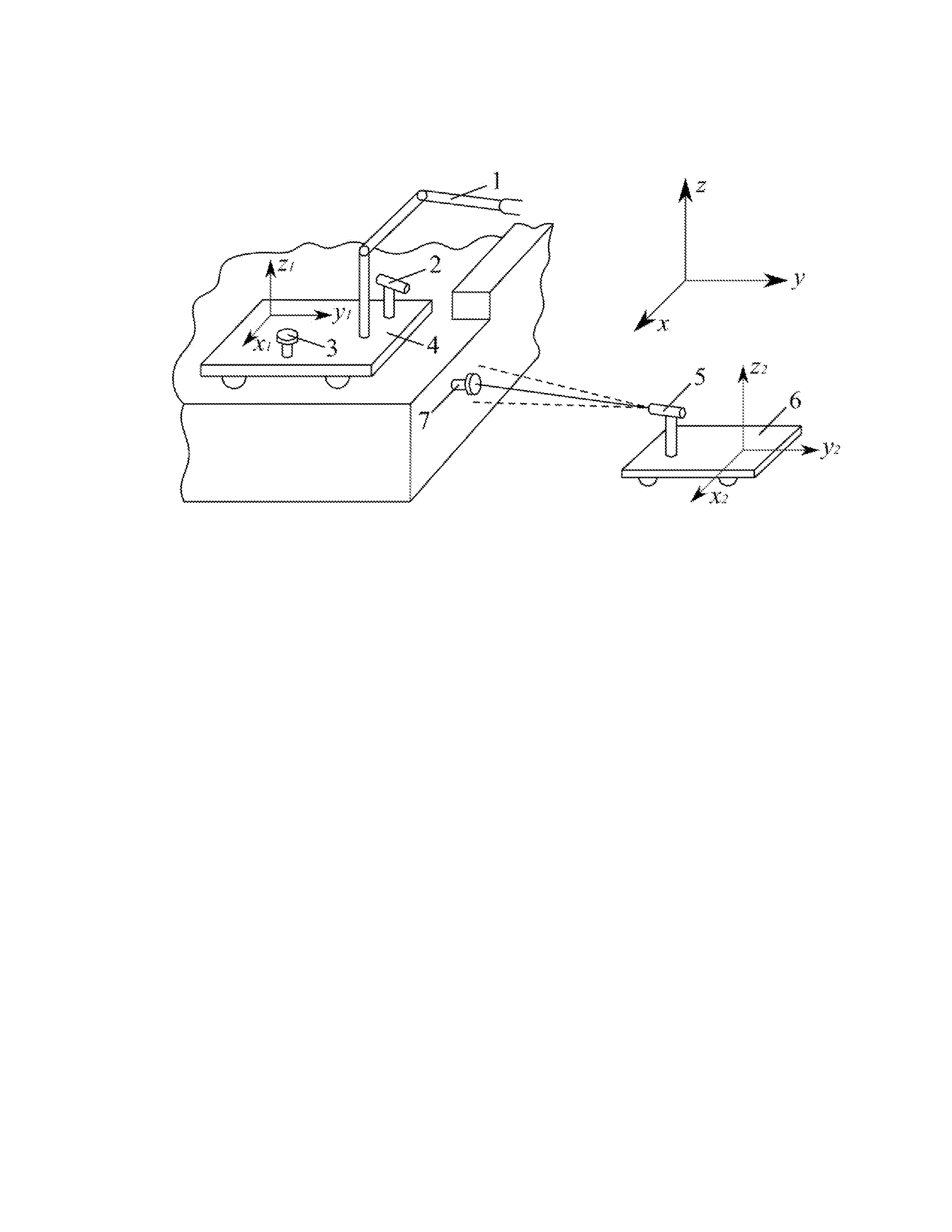
На фиг. 1 показана схема, реализующая предлагаемый способ управления манипулятором, расположенным на первом MP, когда информация об объекте работ поступает от СТЗ, расположенной на втором MP.
На фиг 1. введены следующие обозначения: 1 - манипулятор; 2 - первая СТЗ; 3 - калибровочный инструмент на упругом стержне; 4 - первый MP; 5 - вторая СТЗ; 6 - второй MP; 7 - объект манипулирования; XYZ - абсолютная система координат (АСК); X1Y1Z1 - первая связанная система координат (ССК), в которой работает манипулятор 1; X2Y2Z2 - вторая ССК, в которой работает СТЗ 5 второго MP 6.
Заявленный способ реализуется следующим образом.
В процессе работы первого MP 4, оснащенного манипулятором 1 и первой СТЗ 2, в сложных условиях окружающей среды могут возникать ситуации, когда эта СТЗ 2 не позволяет наблюдать объект манипулирования 7 во время автоматического выполнения с ним манипуляционных операций (см. фиг. 1) особенно при работе в стесненных условиях окружающей среды. В этом случае для определения расположения объекта манипулирования 7 используют более маневренный и, возможно, меньший по габаритам второй MP 6, оснащаемый второй СТЗ 5. Второй MP 6 подходит (или подлетает при использовании летательных MP) к объекту манипулирования 7 с удобного ракурса так, чтобы одновременно был виден этот объект и калибровочный инструмент 3, одновременно сканирует их с помощью второй СТЗ 5 и формирует их пространственные координаты в ССК X2Y2Z2. Затем эти координаты с учетом взаимного расположения объекта манипулирования 7 и калибровочного инструмента 3 в пространстве с помощью навигационной системы второго MP 6 (на фиг. 1 не показана) из ССК X2Y2Z2 переводятся в АСК, а из нее с помощью навигационной системы первого MP 4 (на фиг. 1 не показана) в ССК X1Y1Z1.
Перевод указанных координат объекта манипулирования 7 и калибровочного инструмента 3 из ССК X2Y2Z2 в АСК, а затем и в ССК X1Y1Z1 всегда осуществляется с одинаковыми погрешностями, свойственными любым навигационным системам. В результате без предварительного уточнения этих координат осуществлять точное автоматическое выполнение технологических операции с объектом манипулирования 7 манипулятор 1 не сможет, ориентируясь только на исходную информацию, полученную с помощью второй СТЗ 5 и переданную в ССК X1Y1Z1. Для качественного выполнения отмеченных операций указанные координаты объекта манипулирования 7 в ССК X1Y1Z1 должны быть уточнены. Для этого используются полученные с помощью СТЗ 5 и уже переданные в ССК X1Y1Z1 координаты калибровочного инструмента 3, отличающиеся от реальных координат калибровочного инструмента 3 в этой ССК.
С целью уточнения пространственных координат объекта манипулирования 7 в ССК X1Y1Z1, характерную точку рабочего органа манипулятора 1 в этой ССК перемещают в точку с координатами расположения калибровочного инструмента 3, полученными от СТЗ 5. СТЗ 2 фиксирует отличие положения калибровочного инструмента 3 и характерной точки рабочего органа манипулятора 1 и с помощью системы цифровой обработки видеоинформации определяют реальное отклонение пространственного положения калибровочного инструмента 3 от характерной точки манипулятора 1 в СК X1Y1Z1. Это отклонение используют для корректировки и уточнения в ССК X1Y1Z1 полученных ранее координат объекта манипулирования 7.
Поскольку указанные выше операции переноса координат объекта манипулирования 7 и калибровочного инструмента 3 из СК X2Y2Z2 в ССК X1Y1Z1 осуществляются одновременно при неподвижном положении первого 4 и второго 6 MP, то ошибки передачи набора всех координат будут одинаковыми. То есть ошибки передачи координат калибровочного инструмента 3 будут такими же, как и ошибки передачи координат объекта манипулирования 7. Поэтому уточнение координат объекта манипулирования 7 после проведения указанной манипуляционной операции будет осуществляться точно. В результате манипулятор 1 будет точно выполнять заданные операции с объектом манипулирования 7, который не находится в поле зрения первой СТЗ 2.
Гибкий стержень у калибровочного инструмента 3 необходим для того, чтобы при возможном касании рабочим органом манипулятора 1 калибровочного инструмента последний не был поврежден.
Техническая реализация предложенного способа управления манипулятором не вызывает принципиальных затруднений, так как в нем используются только типовые алгоритмы, а также типовые технические элементы и устройства.
Рацемический 2,17аβ-дисульфамоилокси-3-метокси-d-гомо-8α-эстра-1,3,5(10)-триен в качестве ингибитора пролиферации опухолевых клеток mcf-7
Устройство для защиты откосов траншеи от осыпания грунта
Преобразователь внешней кинетической энергии в электроэнергию
Композиция хлебопекарного улучшителя
Способ очистки нефтесодержащих сточных вод
Морская ледостойкая платформа
Установка для комплексной переработки жидких радиоактивных отходов
Смесь для приготовления мороженого
Композиция для приготовления кондитерских изделий на основе сбивных масс типа суфле
Смесь для приготовления мороженого
Самонастраивающийся электропривод
Самонастраивающийся электропривод манипулятора
Самонастраивающийся электропривод манипуляционного робота
Самонастраивающийся электропривод
Устройство для программного управления манипулятором
Самонастраивающийся электропривод манипулятора
Самонастраивающийся электропривод манипулятора
Самонастраивающийся электропривод манипулятора
Устройство для программного управления манипулятором
Устройство формирования программных сигналов управления

