Результат интеллектуальной деятельности: НЕЛИНЕЙНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЗАМИ ЛОКОМОТИВА
Вид РИД
Изобретение
Изобретение относится к радиотехнике, точнее к нелинейной радиолокации (НРЛС), и может быть использовано на ж/д для точного определения ординат пригородных поездов (электричек) и вообще всех видов пассажирских поездов, включая высокоскоростные для автоматизации управления тормозами на остановочных пунктах. Круг предложений НРЛС может быть отнесен к задаче установления границ маршрутов следования в условиях, когда невозможно их визуальное наблюдение, а также получение информации о параметрах движения его участников на трассе маршрутов, что значение маркировки границ особенно возрастает, когда длина остановочных путей соизмерима с длиной (размерами) транспортных средств.
Общей проблемой точной остановки пассажирских поездов на остановочном пункте являются погодные условия и время суток:
- ночь;
- туман;
- метель - пурга (снегопад);
- сильный дождь;
- вообще плохая видимость.
А также человеческий фактор: усталость, плохое самочувствие, неприятность в быту и на службе и пр. Машинисту нужно точно «засечь» начало платформы (маркер) и произвести нужные технические действия в ограниченное время (торможение) до полной остановки в строго назначенном месте.
В настоящее время эти действия производятся машинистом «на глазок», т.е. эмпирически, исходя из его опыта и навыков, а плохие погодные условия сильно влияют на конечный результат.
Исходя из этого крайне желательно иметь автоматическую систему управления обнаружения маркера начала платформы, а, значит, и начала процесса торможения, независимых от внешних неблагоприятных факторов, включая человеческий.
Известны попытки создания точного обнаружения начала платформы такие, как: акустические на использования ультразвукового маркера и приемника в кабине машиниста, лазерный на использовании лазерного маркера и приемника также в кабине машиниста, радиолокационный: РЛС малой мощности на маркере и приемник в кабине, также фотодатчик на маркере и фотоприемник в кабине и пр.
Их основные недостатки: или большая стоимость, или зависимость от погодных условий, т.е. в масштабах большого количества остановочных пунктов и плохих погодных условий (особенно в северных широтах РФ) эта проблема еще очень далека от оптимального решения и кроме опытных образцов на ж/д транспорте ничего не внедрено.
Известен «Комплекс информационного обеспечения системы автоматического управления торможением поездов», см. патент РФ №, в котором использована система расчета тормозных характеристик поезда в зависимости от местонахождения локомотива по сигналам спутниковых навигационных систем GPS/ГЛОНАСС.
Недостаток: GPS - предназначена в основном для экваториальных и южных широт, ГЛОНАСС - для более северных широт, т.е. совместное применение находится в достаточно узкой полосе широт, далее на время проведения военных действий (операций) GPS на какое-то время выдает заведомо неверную информацию (насчет ГЛОНАСС сведений нет), т.о. погрешность определения координат может достигать десять и более метров, что является недопустимым для выполнения качественного торможения по ординате ж/д пути и по времени.
Технической задачей изобретения является повышение точности определения скорости локомотива и ординаты его положения относительно остановочных пунктов и точности остановки пассажирских поездов у платформы остановочных пунктов с приемлемой - минимальной себестоимостью системы для серийного производства.
Технический результат достигается за счет создания информационного канала, состоящего из нелинейной РЛС на локомотиве и нелинейного рассеивателя на маркере, расположенном в самом начале остановочной платформы в виде р-n перехода.
Для решения поставленной задачи предлагается новое название, содержащее собственно НРЛС и метку в виде нелинейно-рассеивающей цели HP - маркеры и микропроцессор, характеризующаяся тем, что имеет следующие соединения: выход сигналов НРЛС соединен с информационным входом микропроцессора, причем информационный выход микропроцессора соединен со схемой управления локомотива, а нелинейная РЛС содержит следующие узлы и блоки: задающий генератор, первый - четвертый умножители частоты, первый и второй передатчики, вычислитель, первый и второй фазовые детекторы, первый и второй приемники, первая и вторая передающие антенны, первая и вторая приемные антенны со следующими соединениями: выход ЗГ частотой ƒ0 соединен с входами первого, второго, третьего и четвертого умножителей частоты, выход первого умножителя частоты соединен с первым передатчиком, выход второго умножителя частоты соединен со вторым передатчиком, выходы которых через первую и вторую передающие антенны соединены с приемопередающей антенной HP, выход этой антенны A3 соединен с антеннами А4 и А5 первого и второго приемника соответственно, выходы этих приемников соединены с сигнальными входами (ФД), с опорными входами которых соединены выходы третьего и четвертого умножителей, выходы первого и второго ФД соединены с первым и вторым информационными выходами вычислителя соответственно; выход вычислителя соединен с центральным процессором управления движением локомотива, с которым также соединен выход первой РЛС малой дальности.
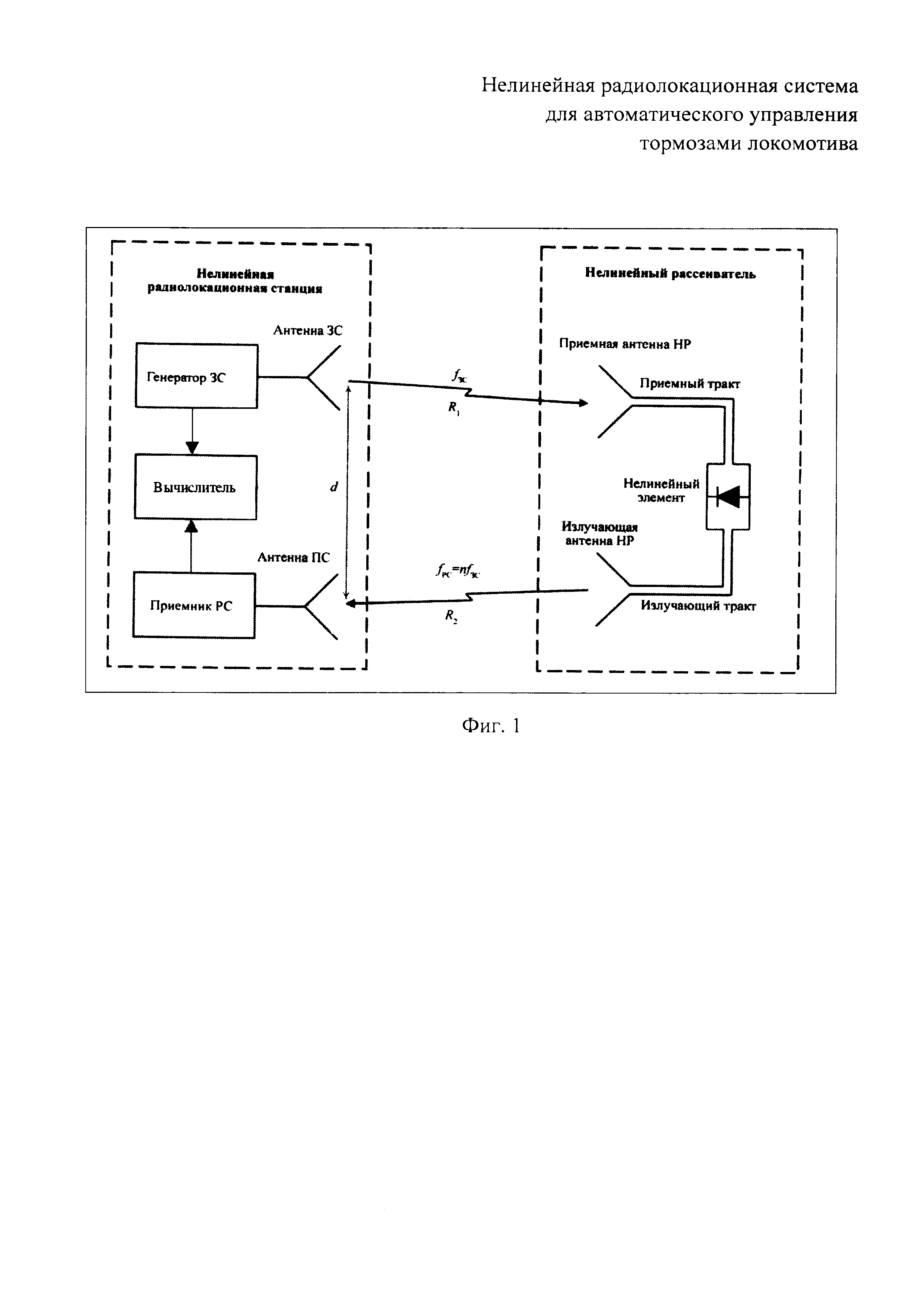
На фиг. 1 показана модель канала взаимодействия НРЛС - HP.
На ней изображено, кроме обозначенных в прямоугольниках:
fЗС - частота зондирующего сигнала (ЗС);
R1 - расстояние от антенны ЗС до приемной антенны HP;
fPC - частота отраженного сигнала от HP;
nfС - гармоники зондирующего сигнала;
R2 - расстояние от излучающей антенны HP до приемной антенны НРЛС.
На фиг. 2 представлена структурная электрическая схема нелинейной РЛС, на фиг. 3-возможный конструктив пассивной антенны для работы с нелинейной РЛС, на фиг. 2 изображено:
1 - задающий генератор (ЗГ);
2, 3, 4 и 5 - умножители частоты;
6 - первый передатчик;
7 - второй передатчик;
8 - нелинейный рассеиватель - метка начала остановочной платформы;
9 - вычислитель;
10, 11 - первый и второй фазовые детекторы (ФД) соответственно;
12, 13 - первый и второй приемники соответственно;
А1 и А2 - первая и вторая передающие антенны соответственно;
A3 - приемопередающая антенна HP;
А4 и А5 - первая и вторая приемные антенны соответственно.
На фиг. 3 изображено:
14 - проводящий лист;
15 и 16 - щели;
17 - точка возбуждения р-n перехода для диода Шотки.
Узлы крепления и размеры не показаны, также не показан радиопрозрачный защитный экран.
Схема на фиг. 2 имеет следующие соединения.
Выход ЗГ 1 частотой ƒ0 соединен с входами первого, второго, третьего и четвертого умножителей частоты (блоки 2, 3, 4 и 5 соответственно), выход первого умножителя частоты соединен с первым передатчиком 6, выход второго умножителя частоты соединен со вторым передатчиком 7, выходы которых через первую и вторую передающие антенны соединены с приемо-передающей антенной HP 8, выход антенны A3 соединен с антеннами А4 и А5 первого и второго приемника 12 и 13 соответственно, выходы этих приемников соединены с сигнальными входами ФД 10 и ФД 11 также соответственно, с опорными входами которых соединены выходы третьего и четвертого умножителей 4 и 5 также соответственно, выходы первого и второго ФД соединены с первым и вторым информационными выходами вычислителя 9; выход вычислителя 9 соединен с центральным процессором управления движением локомотива.
Конструкция выполнена на одностороннем фольгированном стеклотекстолите, ИР 8 содержит проводящий лист 14, на котором вырезаны две ветви 15 и 16, образующие спиральную антенну с двухзаходными спиралями в виде плоской щели, а между этими спиралями в точке возбуждения расположен р-n переход 17 (диод Шотки).
Антенна может быть выполнена и в виде выпуклой плоской спирали также на диэлектрической подкладке. Любой из этих конструктивов в принципе равнозначен. Размер антенны зависит от выбранной частоты.
Схема на фиг. 2 работает следующим образом.
На пути следования локомотива у каждого канала остановочной платформы на специальной мачте расположен HP на высоте 2-3 метра, причем его диаграмма направленности ориентирована поперек ж/д пути, а на боку передней части у каины машиниста расположена НРЛС, причем блок его приемо-передающих антенн ориентирован перпендикулярно продольной оси локомотива от ж/д пути параллельно поверхности земли, образуя вместе с HP информационный канал определения ординаты локомотива: НРЛС - HP - НРЛС - МП, далее автоматическая система управления тормозами от ЦП.
В качестве нелинейного локатора для данной задачи выбран фазовый НЛРС с комбинационным преобразованием частоты на HP.
HP состоит из антенной системы, согласующего устройства и нелинейного преобразователя частоты зондирующего сигнала (р-n переход). Относительный уровень вторичных сигналов зависит от конструкции, геометрических размеров, электрических свойств HP, ее положения и расстояния относительно локатора. Преобразование частоты в HP осуществляется либо на активном элементе (используется нелинейная вольт-амперная характеристика высокочастотного диода), либо на реактивном элементе (используется нелинейная вольт-фарадная характеристика р-n перехода). В первом случае имеет место эффект нелинейного, а во втором - параметрического преобразования частоты.
Два основных требования к HP устанавливаемой на лоцируемом объекте, следующие:
- достаточно высокая энергетика преобразования зондирующих сигналов во вторичное излучение (большое значение НЭПР ан);
- малые габаритные размеры, чтобы не вносить дополнительных погрешностей в результаты измерений.
НРЛС отмечает HP и передает команду на начало торможения в систему управления локомотива для автоматического исполнения.
Для получения двушкального отсчета дальности в НРЛ используются колебания двух зондирующих частот ƒ1=ƒ0 и ƒ2=mf0. Прием сигналов от НРЦ ведется двухканальным приемником на к -х гармониках зондирующих частот: kƒ1=kƒ0 и kƒ2=kmƒ0. Число k на практике следует выбирать равным двум или трем (при больших k ухудшается энергетика радиолинии, а при малых будет большой уровень СПП из-за внеполосного излучения передатчиков).
Для обеспечения когерентности сигналов в локаторе колебания всех частот следует формировать путем умножения частоты задающего генератора (ЗГ) ƒ0 в целое число раз. Таким же способом получаются и опорные колебания для фазовых дискриминаторов (ФД).
На выходах ФД1 и ФД2 действуют напряжения, пропорциональные разностям фаз принятых и опорных колебаний, которые с учетом использованных на рис. 2 обозначений равны


Как следует из фиг. 2, при проектировании фазового НРЛ-мера необходимо выбрать три параметра: ƒ0, m и k, исходя из предъявляемых требований: максимальной дальности измерения Rmax и требуемой точности δR.
Полагая, что максимальная разность фаз, однозначно измеряемая ФД, равна 2π÷Δϕmax=2π, из уравнений (7) и (8) получим:


где δϕ2 - точность измерения разности фаз Фд2.
Из (7) находим номинальную частоту ЗГ:

Полагая δϕ2≈0,1 рад и подставляя в выражение (8) ƒ0 из (9), получим оценку точности:

откуда находим

где entier {…} - символ целой части числа, стоящего в скобках.
С точки зрения энергетики радиоканала коэффициент к следует выбирать равным двум или трем. Формулы (9) и (11) позволяют определить основные неэнергетические параметры НРЛС с фазовым измерением дальности, построенного по схеме рис. 2. При этом гарантируется согласование шкал грубого и точного отсчетов.
Алгоритм работы вычислителя для схемы фиг. 2 следующий.
В соответствии с формулами (5) и (6) определяются оценки дальности по шкале грубого отсчета  и по шкале точного отсчета
и по шкале точного отсчета  :
:


где N - число полных периодов колебаний частоты kƒ2=kmƒ0 (число полных длин волн на удвоенном расстоянии от НРЛС до HP), которое с помощью ФД2 не фиксируется.
Для определения величины N учтем, что фазовому запаздыванию Δϕ1 на частоте kƒ1=kƒ0 соответствует временная задержка

где  - период колебаний частоты kƒ1.
- период колебаний частоты kƒ1.
На этом интервале времени укладывается N полных периодов колебаний частоты kƒ2=kmƒ0, равных  . Разделив (16) на Tkm, получим
. Разделив (16) на Tkm, получим

Фазовый НРЛС с комбинационным преобразованием частоты
На фиг. 2 изображена функциональная схема фазового НРЛС с комбинационным преобразованием частоты на HP, обеспечивающего точный и однозначный отсчет дальности. В локаторе применяются сигналы двух зондирующих частот ƒ1 и ƒ2, а прием осуществляется на комбинационных частотах  и
и  . В таком варианте построения схемы разностная частота
. В таком варианте построения схемы разностная частота  обеспечивает грубый, но однозначный отсчет дальности, а суммарная частота
обеспечивает грубый, но однозначный отсчет дальности, а суммарная частота  - точный, но неоднозначный отсчет.
- точный, но неоднозначный отсчет.
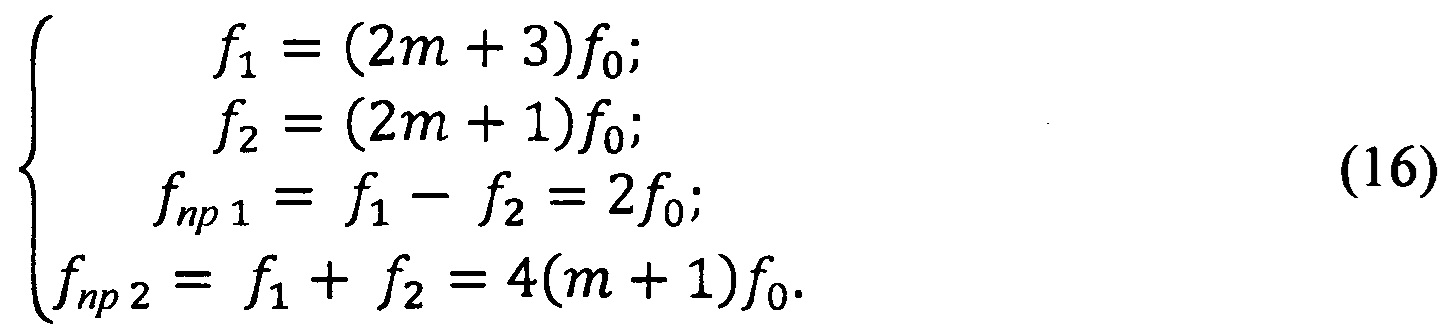
В схеме НРЛС, изображенной на фиг. 2 номинальные значения частот зондирующих и принимаемых сигналов следующие:
Двухчастотный прием позволяет реализовать высокоточное однозначное измерение дальности при условии согласования шкал грубого и точного отсчетов. Если же при двухчастотном приеме (двушкальном отсчете) согласовать требования по дальности и точности измерений не удается, то число шкал, определяемое числом принимаемых частот (числом каналов приема), может быть увеличено.
На выходах ФД1 и ФД2 действуют напряжения, пропорциональные разностям фаз принятых и опорных колебаний, которые с учетом использованных на фиг. 3 обозначений равны


Измеренные разности фаз подаются на вычислитель, вычисляющий оценку дальности  до HP.
до HP.
НРЛС имеет следующие особенности:
- измеритель имеет двушкальный отсчет дальности;
- используются компоненты суммарной и разностной частот преобразованных на нелинейном элементе HP сигналов;
- для обеспечения когерентности использованных колебаний (принимаемых и опорных) формирование сигналов осуществляется умножением частоты ЗГ ƒ0 на целые числа: 2m+3; 2m+1; 4(m+1); 2m, что обеспечивает также согласование шкал грубого и точного отсчетов. Рассмотрим методику выбора неэнергетических параметров локатора при заданных максимальной дальности Rmax и точности измерения дальности δR.
Примем, что погрешность измерения сдвига фаз может быть доведена до значения δϕ=0,1 рад.
Из выражения (2) имеем

Отсюда находим номинальную частоту ЗГ:

Для нахождения параметра m разрешим выражение (3) относительно R и запишем полученное соотношение в вариациях δR и δϕ2:

Принимая δϕ2≈0,1 рад и подставив ƒ0 из (5), получим

откуда находим

Таким образом, по формулам (5) и (10) можно определить два основных неэнергетических параметра НРЛС с фазовым методом измерения дальности: частоту ЗГ ƒ0 и параметр ь, через который выражаются коэффициенты умножения частоты в НРЛС-комб по схеме фиг. 1 [см. (1)]
Алгоритм работы вычислителя на фиг. 3 следующий.
Согласно формулам (2) и (3) с учетом (1) определяются оценки дальности по шкале грубого отсчета  и по шкале точного отсчета
и по шкале точного отсчета  :
:


где N - число полных периодов колебаний частоты  (число полных длин волн на удвоенном расстоянии от НРЛС до HP), которое с помощью ФД2 не фиксируется.
(число полных длин волн на удвоенном расстоянии от НРЛС до HP), которое с помощью ФД2 не фиксируется.
Для определения величины N учтем, что фазовому запаздыванию Δϕ1 на частоте  соответствует временная задержка
соответствует временная задержка

где ТΔ - период колебаний разностной частоты  равный
равный 
На этом интервале времени укладывается N полных периодов колебаний частоты  , равных
, равных  Разделив (28) на ТΣ, получим
Разделив (28) на ТΣ, получим

Таким образом, вычислитель фазового НРЛС с комбинационным преобразованием частоты в HP в соответствии с (14) вычисляет число N по измеренному отсчету Δϕ1 а затем по формуле (12) дает оценку расстояния от НРЛС до HP, также фиксирует момент прохождения HP передней частью локомотива, что является сигналом начала торможения.
Кроме фазового метода измерения дальности, в НРЛС могут применяться импульсный и частотный методы. Однако они, обладая пространственным разрешением по дальности, для обеспечения тех же точностных характеристик, что и фазовый метод, требуют значительного усложнения аппаратуры, поскольку в импульсном методе для зондирования необходимы наносекундные импульсы, а в частотном методе - ЛЧМ-сигналы с девиацией частоты в несколько сотен мегагерц.
Таким образом, фазовый метод измерения дальности до HP и скорости локомотива в НРЛС имеет существенные преимущества по точности и простоте аппаратурной реализации по сравнению с импульсным и частотным методами.
На фиг. 4 изображен ход лучей для измерения ординат локомотива при приближении к остановочному пункту, на которой показано:
HP - нелинейный рассеиватель;
НРЛС - нелинейная радиолокационная станция;
l - расстояние между HP и серединой ж/д пути прохождения локомотива на высоте HP - НРЛС = const;
l' - измеренное расстояние между HP и РЛС в текущий момент времени равный var;
(а - б) - вычисленное расстояние от локомотива до начала остановочного пункта.
Работа системы при измерении ординат локомотива до остановочного пункта происходит следующим образом. С частотой запросного зондирующего сигнала с НРЛС происходит измерение дальности о HP. При каждом запросе и ответном отраженном сигнале вычисляется в ЦП расстояние от локомотива до начала остановочного пункта по теореме Пифагора равное 
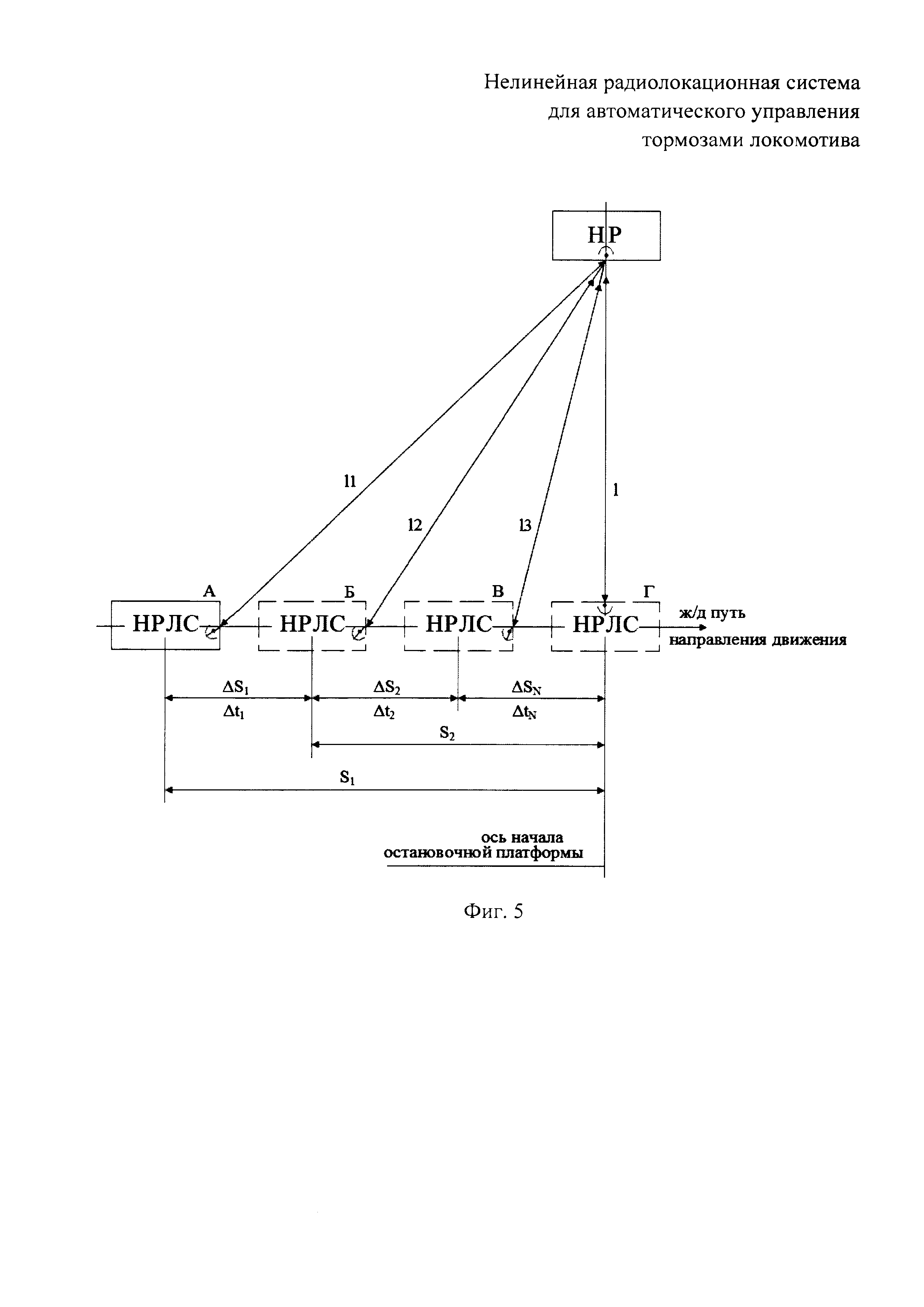
На фиг. 5 изображен ход лучей для измерения мгновенной скорости локомотива, на которой показано:
HP - нелинейный рассеиватель;
НРЛС - нелинейная радиолокационная станция;
А-Г - условные положения НРЛС по времени приближения к остановочному пункту;
l - расстояние между HP и серединой ж/д пути прохождения локомотива на высоте HP - НРЛС = const;
l1 - 1-3 - измеренные расстояния между НРЛС и HP в каждый момент времени равный var;
ΔS1-ΔSN, вычисленные расстояния прохождения локомотива за промежутки времени Δt1-ΔtN.
Измерение мгновенной скорости происходит следующим образом. С частотой запросного зондирующего сигнала с НРЛС происходит измерение дальности до HP и засекается время между двумя запросами, тогда эта мгновенная скорость измеряется по формуле:  в нашем случае
в нашем случае  , причем ΔS вычисляется как на фиг. 4 путем вычитания расстояния от локомотива до остановочного пункта между двумя соседними запросами, т.е. ΔS1=S1-S2 и т.д.
, причем ΔS вычисляется как на фиг. 4 путем вычитания расстояния от локомотива до остановочного пункта между двумя соседними запросами, т.е. ΔS1=S1-S2 и т.д.
Т.к. время между запросами составляет несколько миллисекунд, то скорость можно усреднить за несколько запросов.
Расположение маркеров на остановочной платформе следующее. При однопутном движении применяется два маркера по одному с каждого края остановочной платформы на самом срезе краев. При двухпутном движении (две посадочной платформы слева и справа от двухпутного пути) маркер устанавливается на каждой платформе справа и слева по ходу движения также на самом срезе платформы. Высоты установки маркеров и НРЛС на локомотиве равны между собой относительно уровня платформы.
Следует заметить, что, если на дистанции межу остановочными пунктами нужно точно контролировать скорость локомотива в определенном месте, там тоже можно установить мачту(ы) с нелинейным рассеивателем и с помощью НРЛС определить скорость.
В заключение следует заметить, что эту задачу: отыскание меток - маркеров и по ним определить скорость ординату локомотива можно и обыкновенным не нелинейным, но это технически очень сложно, т.к. такие локаторы не отличают сигнал от маркера от других целей на пути следования локомотива, как то: мачты электропередач и их провода, мачты сотовой связи, движущуюся технику около ж/д и вообще любые отражающие предметы, а их около остановочных платформ очень много, следовательно, будет много ложных целей, а, какая из них истинная, не выделяется. Только применение НРЛС однозначно решает эту задачу, причем с экономической точки зрения также очень успешен, т.к. мощность передатчика НРЛС лежит в пределах микроватт, что соизмеримо с мощностью сотового телефона.
Далее, в каждом маркере и в его ответном сигнале можно применить кодовую модуля ясно для однозначного определения номера маркера, причем для этого используется маломощная микросхема, получающая питание от запросных сигналов НРЛС. При раскодировании кодовой модуляции: порядковый номер маркера заносится на табло в кабине машиниста, который видит, около какого маркера, а, следовательно, и около какого остановочного пункта или около другой сигнальной отметки находится локомотив, несмотря, например, на плохую видимость: ночь, туман, снежные заряды и пр.
Способ путевой навигации и измерения скорости локомотива по геометрии железнодорожного пути
Способ путевой навигации и обзора передней полусферы локомотива по геометрии железнодорожного пути
Комплекс информационного обеспечения системы автоматического управления торможением поезда
Способ контроля плотности тормозной сети поезда
Ультразвуковой расходомер
Датчик угла поворота
Способ передачи информационных сообщений в микропроцессорных системах управления и диагностики
Способ путевой навигации и измерения скорости локомотива по геометрии железнодорожного пути
Способ путевой навигации и обзора передней полусферы локомотива по геометрии железнодорожного пути
Комплекс информационного обеспечения системы автоматического управления торможением поезда
Ультразвуковой расходомер
Датчик угла поворота

